Oleh: Dimas Avian Maulana Dosen Pembimbing: Subchan, Ph.D
|
|
|
- Utami Hartanto
- 5 tahun lalu
- Tontonan:
Transkripsi

1 Oleh: Dimas Avian Maulana Dosen Pembimbing: Subchan, Ph.D
2 Robot mobil adalah salah satu contoh dari wahana nir awak (WaNA) yang dapat dikendalikan dari jauh atau memiliki sistem pengendali otomatis untuk bergerak dan berpindah haluan. Robot mobil menjadi salah satu sarana yang digunakan oleh pihak militer untuk untuk melakukan pengintaian, penjelajahan, dan pengawasan ke tempat-tempat yang berbahaya bagi manusia. Pada penerapannya ada beberapa lintasan yang dianggap berbahaya untuk dilalui, didefinisikan suatu lintasan terlebih dahulu agar robot mobil bergerak sesuai lintasan tersebut. Robot mobil tidak bisa mengikuti lintasan dengan baik tanpa diberi perintah terlebih dahulu dan dikendalikan. Untuk itu, diperlukan suatu metode untuk mengendalikan robot mobil agar dapat bergerak mengikuti lintasan dalam misinya untuk melakukan pengintaian, penjelajajahan dan pengawasan. Dalam tugas akhir ini, diterapkan model predictive controller (MPC) untuk mendesain suatu desain pengendalian. Lebih lanjut lagi digunakan MPC Linear dalam mendesain pengendalian robot mobil tersebut. Hasil yang diperoleh adalah bahwa MPC Linear dapat diterapkan dalam desain pengendalian robot mobil dengan beberapa bentuk lintasan. Kata kunci : desain pengendalian, robot mobil, model predictive control (mpc)
3 Wahana Nir Awak (WaNA) Robot Mobil Lintasan Trajectory Tracking Pengendalian Robot Mobil Model predictive control
4 Masalah yang akan dibahas adalah bagaimana penerapan model predictive control pada desain pengendalian robot mobil beroda empat
5 Digunakan MPC linear. Karena masih berupa prototype, dianggap tidak ada hambatan pada lintasan dan robot mobil tidak pernah tergelincir. Lebar lintasan yang dilalui robot mobil adalah 1 m Kontrol masukannya adalah kecepatan linear v dan sudut kemudi φ. Kecepatan linear v tidak bernilai nol. State (ruang keadaan) dari model tersebut dianggap sama dengan model yang sebenarnya. Digunakan horizon prediksi N = 3 dan dilakukan iterasi sebanyak 10 kali Posisi robot mobil berada pada selang 0 θ < π 2
6 Tujuan yang ingin dicapai dalam Tugas Akhir ini adalah diterapkannya MPC untuk mendesain pengendalian robot mobil beroda empat. Manfaat yang diharapkan dari Tugas Akhir ini adalah: Mengendalikan robot mobil sesuai lintasan Sebagai rujukan untuk navigasi, panduan, dan kendali pada WaNA
7 Roda Depan Y x, y L φ Roda Belakang Gambar 1: Dimensi fisik Robot Mobil Gambar 2: Sistem kemudi robot mobil (1) x = dx dt y = dy dt = v cos θ (1) = v sin θ (2) θ X
8 φ φ L κ t = 1 R t κ t κ t = tan φ t L = dθ ds θ = dθ dt = dθ ds ds dt θ = κ t v t tan φ θ = v (3) L R Gambar 2: Sistem kemudi robot mobil (2)
9 Sehingga dari persamaan (1), (2), dan (3) dan dengan memisalkan dengan memisalkan x = x 1, y = x 2, dan θ = x 3, dapat dituliskan sebuah sistem dinamik dari kinematika robot mobil sebagai berikut : x 1 = v cos x 3 (1) x 2 = v sin x 3 (2) x 3 = v tan φ 3 L Atau jika dinyatakan dalam bentuk kompak x = f x, u 4
10 Model Predictive Contol atau MPC adalah suatu metode proses kontrol lanjutan yang banyak diterapkan pada proses industri. MPC adalah algoritma pengendali peubah banyak (Wikipedia, Model Predictive Control, 2004). Ada dua tipe MPC, yaitu MPC Linear dan MPC Nonlinear 3 komponen yang memegang peranan penting yaitu : Model prediksi Fungsi objektif Aturan kontrol (control law)
11 Tabel 1: Tipe MPC MPC Linear 1. Menggunakan model linear x = Ax + Bu 2. Fungsi objektif kuadratik F = x T Qx + u T Ru 3. Kendala linear Fx + Gu < 0 4. Diselesaikan dengan menggunakan Quadratic program (pada MATLAB menggunakan quadprog) MPC Nonlinear 1. Menggunakan model nonlinear x = f x, u 2. Fungsi objektif bisa berupa nonkuadratik F = x, u 3. Kendala nonlinear (x, u) < 0 4. Diselesaikan dengan menggunakan Nonlinear program (pada MATLAB menggunakan fmincon)

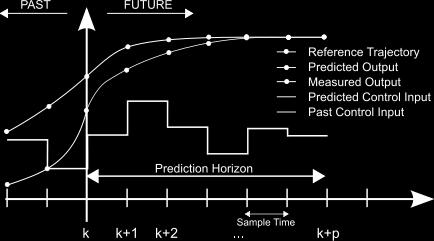
12 Gambar 4: Skema MPC
13 Didefinisikan x k = x k x r k 0 sebagai aturan kontrol Diharapkan nilai x k mendekati nol sehingga robot mobil bergerak sama persis dengan referensi lintasan.
14 Gambar 5: Algoritma Trayektori Lintasan Step 0 Input kontrol referensi x r 0, u r dan x 0 Step1 Bila kondisi STOP belum terpenuhi, kerjakan step 2-5 Step 2 Dapatkan nilai error posisi untuk iterasi k x k = x k x r k Step 3 Mendapatkan prediksi nilai kontrol optimal untuk sampling ke k, k + 1, dan k + 2 dari MPC Step 4 Dapatkan nilai error kontrol untuk iterasi k u k = u k u r k Step 5 Mendapatkan posisi sebenarnya x k + 1 robot mobil Step 6 Tes kondisi STOP Step 7 Plot grafik referensi lintasan Step 8 Plot grafik posisi sebenarnya robot mobil Step 9 Plot state x, y, dan θ
15 Metode pengendalian optimal yang digunakan pada MPC linear ini adalah quadratic programming. Didefinisikan fungsi objektif (da Silva Jr., Kühne, & Lages, 2005) N J k = x T k + j k Qx k + j k + u T k + j 1 k Ru(k + j Dengan : j=1 1 k) (5) N : horizon prediksi Q : matriks pembobot state-space R : matriks pembobot kontrol a m n menyatakan nilai a pada saat m yang diprediksi pada saat n
16 Matriks Q merupakan matriks semidefinit positif Q 0 dan matriks R merupakan matriks definit positif R > 0. Masalah optimasi dapat ditulis kembali dalam bentuk QP secara umum. Didefinisikan vektor-vektor berikut ini (da Silva Jr., Kühne, & Lages, 2005): x k + 1 u k x k + 1 k x k + 2 k x k + N k u k k u k + 1 k u k + N 1 k
17 Sehingga dapat ditulis kembali fungsi objektif (5) sebagai berikut: J k = x T k + 1 Qx k u T k Ru k (6) dengan: Q R Q Q Q R R R
18 Didefinisikan x k + 1 = A k x k k + B k u k (7) dengan: B k A k k A k k A k + 1 k A k α k, 0 B k k 0 0 A k + 1 k B k k B k + 1 k 0 α k, 1 B k k α k, 2 B k + 1 k B k + N 1 k Dimana: α k, j didefinisikan sebagai: N 1 α k, j = A k + i k i=j
19 Fungsi objektif (7) ditulis kembali sebagai berikut J k = 1 2 ut k H k u k + f T k u k + d k (8) dengan: H k 2 B T k QB k + R f k 2B T k QA k x k k d k x T k k A T k QA k x k k Matriks H adalah Matriks Hessian, definit positif yang mendeskripsikan bagian kuadratik dari fungsi objektif tersebut. Sedangkan f mendeskripsikan bagian linear. d tidak bergantung pada u dan tidak berpengaruh pada penentuan nilai u.
20 Fungsi objektif (7) menjadi sebagai berikut J k = 1 2 ut k H k u k + f T k u k (9) yang merupakan pernyataan standar yang digunakan dalam masalah quadratic programming dan masalah optimasi yang diselesaikan pada waktu sampling dinyatakan sebagai: u = arg min u J k Agar performansi kontrol baik, perlu diberikan suatu batasan pada kontrol masukannya (Wang, 2009). Didefinisikan batasan untuk kontrol masukan pada iterasi ke-k u min u k + j k u maks
21 Dari persamaan tersebut dapat dinyatakan ke dalam dua bentuk pertidaksamaan u k + j k u maks u k + j k u min Jika dinyatakan dalam bentuk matriks I I u k + j k u maks u min dengan : j 0, N 1
22 Nilai u optimal yang akan meminimumkan J, diperoleh dari J = 0. Jika H k simetris, maka turunan pertama J k adalah dj k du = d 1 du 2 ut k H k u k + f T k u k dj k = H k u k + f k du Syarat perlu untuk memperoleh nilai minimum J adalah dj k du = 0 u k = H 1 k f k (10) Dalam tugas akhir ini akan digunakan subroutine quadprog dalam MATLAB untuk menyelesaikan masalah optimasi
23 1. Mengkaji kinematika robot mobil dan MPC 2. Membentuk desain pengendalian 3. Simulasi permasalahan dengan menggunakan MPC Linear Penyimpulan Hasil dan Pemberian Saran
24 Dari kinematika robot mobil akan diperoleh suatu referensi lintasan dengan mendiskritkan kinematika robot mobil dengan menggunakan beda hingga maju dan mengambil nilai L = 4/5. maka: x r 1 k + 1 = x r1 k + v r k t cos x r 3 k x r 2 k + 1 = x r2 k + v r k t sin x r 3 k x r 3 k + 1 = x r3 k v r k t tan φ r k
25 Dilakukan linearisasi sebelum mencari nilai x, y, dan θ. Sebuah model linear diperoleh dari penghitungan sebuah model error yang berhubungan dengan referensi robot mobil. Didefinisikan referensi robot mobil x r = f x r, u r (11) Dengan mengekspansikan persamaan (4) disekitar titik x r, u r dan menghilangkan turunan tingkat tinggi akan diperoleh: dx dt = f x r, u r + f x, u f x, u x x=x r u=u r x x r + u x=x r u=u r u u r (12) atau x = f x r, u r + f x,r x x r + f u,r u u r (13)
26 Dimana f x,r x x r dan f u,r u u r menyatakan matriks jacobian f yang berhubungan dengan x dan u disekitar titik referensi x r, u r Kemudian, dengan mengurangkan persamaan (11) dan (13) menghasilkan: x = f x,r x + f u,r u
27 Dengan menghampiri x dengan beda maju dan mengambil waktu sampling t = 1s, diperoleh suatu model prediksi sebagai berikut: x k + 1 = A k x k + B k u k (14) B = A = 1 0 v r k sin x 3 k 0 1 v r k cos x 3 k cos x 3 k 0 sin x 3 k tan φ r k 5 4 v r sec 2 φ r k
28 Persamaan (12) dapat ditulis sebagai: x k + 1 = A k x k + B k u k (15) dengan B k = 1 0 v r k sin x 3 k A k = 0 1 v r k cos x 3 k cos x 3 k 0 sin x 3 k tan φ r k 5 4 v r k sec 2 φ r k
29 Robot mobil diasumsikan bergerak pada lintasan yang bebas hambatan, dan hanya bergerak maju. Diberikan suatu batasan pada kontrol sudut kemudi yaitu π 6 φ π 6. Tanda negatif menyatakan robot mobil sedang melakukan pergerakan ke kanan (belok ke kanan), sedangkan tanda positif menyatakan hal yang sebaliknya (belok ke kiri) dengan acuan 0 terletak pada sumbu-x positif sesuai dengan koordinat kartesius. θ menyatakan posisi mobil terhadap sumbu-x positif pada koordinat kartesius dan θ 0 menentukan arah gerak pertama robot mobil tersebut. Simulasi desain pengendalian ini dilakukan dengan memberikan nilai matriks pembobot state-space Q = 0,01 eye(9) dan matriks pembobot kontrol R = 0,01 eye(6). Dalam simulasi tugas akhir ini, source code dikerjakan dalam kondisi statis, dimana variabel-variabel yang diperlukan didefinisikan terlebih dahulu. Karena digunakan MPC dengan N = 3, dengan kata lain akan diprediksi kontrol untuk dua langkah kedepan, maka matriks Q berupa matriks 9 9 dan matriks R berupa matriks 6 6. Simulasi dilakukan dengan kontrol referensi yang konstan dalam beberapa lintasan.
30 posisi-y (meter) Pendahuluan Dengan mengambil Posisi awal referensi lintasan robot mobil x r0, y r0, θ r0 = 0,0,0, Kontrol referensi v r, φ r = 0.8, π 12, Posisi awal robot mobil x 0, y 0, θ 0 = 0,0, π 18 dan iterasi sebanyak 10 kali, diperoleh: Grafik Posisi Robot Mobil Posisi Referensi Posisi Sebenarnya posisi-x (meter) Gambar 4: Pergerakan robot mobil untuk φ r = π 12
31 posisi sudut (radian) posisi-y (meter) posisi-x (meter) Pendahuluan Posisi Referensi Posisi Sebenarnya Posisi pada sumbu-x waktu sampling (detik) Posisi pada sumbu-y Posisi Referensi Posisi Sebenarnya waktu sampling (detik) Posisi sudut mobil Posisi Referensi Posisi Sebenarnya waktu sampling (detik) Gambar 4: State x, y, dan θ untuk x 0, y 0, θ 0 = 0,0, π 18
32 Tabel 2: Posisi Referensi dan Posisi Sebenarnya Iterasi Referensi Sebenarnya x y θ x y θ 1 0,0000 0,0000 0,0000 0,0000 0,0000 0, ,8000 0,0000 0,0058 0,8000 0,0000 0, ,6000 0,0047 0,0117 1,6000 0,0047 0, ,3999 0,0140 0,0175 2,3999 0,0140 0, ,1998 0,0281 0,0234 3,1998 0,0281 0, ,9996 0,0468 0,0292 3,9996 0,0468 0, ,7992 0,0701 0,0351 4,7992 0,0701 0, ,5988 0,0982 0,0409 5,5988 0,0982 0, ,3981 0,1309 0,0468 6,3981 0,1309 0,0468 Tabel 3: Error Error Iterasi x y θ 1 0,0000 0,0000 0, ,0000 0,0000 0, ,0000 0,0000 0, ,0000 0,0000 0, ,0000 0,0000 0, ,0000 0,0000 0, ,0000 0,0000 0, ,0000 0,0000 0, ,0000 0,0000 0, ,0000 0,0000 0, ,1972 0,1683 0,0526 7,1972 0,1683 0,0526
33 Dari analisis dan pembahasan yang telah dilakukan dalam menerapkan MPC untuk mendesain pengendalian pada robot mobil beroda empat diperoleh kesimpulan bahwa: 1. Model Predictive Controller (MPC) dapat diterapkan pada desain pengendalian robot mobil beroda empat. 2. MPC linear memberikan hasil yang cukup baik untuk memberikan prediksi nilai kontrol optimal dengan menghasilkan error yang paling besar pada posisi sudut θ sebesar 0, Dengan mengambil horizon prediksi N = 3, waktu sampling t = 1s dan iterasi sebanyak 10 kali diperoleh nilai x k yang mendekati dengan nilai x r k 4. Dari hasil simulasi, robot mobil dapat mengikuti lintasan dengan baik pada beberapa lintasan, terutama lintasan lurus φ r k = 0.
34 Saran yang diajukan dari Tugas Akhir ini untuk penelitian selanjutnya adalah sebagai berikut: 1. Source code simulasi pada tugas akhir ini dilakukan secara statis, tidak dinamis. Diharapkan pada penelitian selanjutnya dikembangkan source code simulasi yang dinamis guna mempercepat running program dan menambah variasi lintasan. 2. Digunakan horizon prediksi yang lebih besar, misal N = 5 dan dilakukan iterasi lebih banyak lagi daripada iterasi yang dilakukan pada tugas akhir ini
35 Bordons, C., & Camacho, E. F. (1999). Model Predictive Control. Sevilla: Springer-Verlag London Limited. da Silva Jr., J. M., Kühne, F., & Lages, W. F. (2005). Mobile Robot Trajectory Tracking Using Model Predictive Control. VII SBAI / II IEEE Latin America Robotics Symposium, 1-7. Hartini, S. (2011). Implementasi Metode Ensemble Kalman Filter (EnKF) Untuk Mengestimasi Posisi Robot Mobil. Tugas Akhir Jurusan Matematika. Surabaya, Jawa Timur, Indonesia: Institut Teknologi Sepuluh Nopember. Naidu, D. S. (2003). Optimal Control System. Idaho: CRC Press. Orukpe, P. E. (2005). Basics of Model Predictive Control. ICM, EEE-CAP (hal. 1-27). London: Imperial College. Sotelo, M. A. (2003). Lateral Control Strategy for Autonomous Steering of Ackerman-like Vehicles. Robotics and Autonomous Systems 45, Wang, L. (2009). Model Predictive Control System Design and Implementation using MATLAB. Melbourne: Springer. Wikipedia. (2004). Model Predictive Control. Wikipedia: The Free Encyclopedia: <URL Wikipedia. (2006). Mobile Robot. Wikipedia: The Free Encyclopedia: <URL
PENERAPAN MODEL PREDICTIVE CONTROL (MPC) PADA DESAIN PENGENDALIAN ROBOT MOBIL BERODA EMPAT
 PADA DESAIN PENGENDALIAN ROBOT MOBIL BERODA EMPAT") PENERAPAN MODEL PREDICTIVE CONTROL (MPC) PADA DESAIN PENGENDALIAN ROBOT MOBIL BERODA EMPAT oleh: Dimas Avian Maulana 1207 100 045 Dosen Pembimbing: Subchan, M.Sc., Ph.D Abstrak Robot mobil adalah salah
PENERAPAN MODEL PREDICTIVE CONTROL (MPC) PADA DESAIN PENGENDALIAN ROBOT MOBIL BERODA EMPAT oleh: Dimas Avian Maulana 1207 100 045 Dosen Pembimbing: Subchan, M.Sc., Ph.D Abstrak Robot mobil adalah salah
Penerapan Model Predictive Control (MPC) pada Desain Pengendalian Robot Mobil Beroda Empat
 pada Desain Pengendalian Robot Mobil Beroda Empat") Penerapan Model Predictive Control (MPC) pada Desain Pengendalian Robot Mobil Beroda Empat Dimas Avian Maulana 1 1 Universitas Negeri Surabaya email: dimasmaulana@unesa.ac.id ABSTRAK Robot mobil adalah
Penerapan Model Predictive Control (MPC) pada Desain Pengendalian Robot Mobil Beroda Empat Dimas Avian Maulana 1 1 Universitas Negeri Surabaya email: dimasmaulana@unesa.ac.id ABSTRAK Robot mobil adalah
ESTIMASI POSISI ROBOT MOBIL MENGGUNAKAN UNSCENTED KALMAN FILTER. Oleh: Miftahuddin ( )
") ESTIMASI POSISI ROBOT MOBIL MENGGUNAKAN UNSCENTED KALMAN FILTER Oleh: Miftahuddin (1206 100 707) Dosen Pembimbing: Subchan, Ph.D Dr. Erna Apriliani, M.Si Abstrak Robot Mobil atau Mobile Robot adalah konstruksi
ESTIMASI POSISI ROBOT MOBIL MENGGUNAKAN UNSCENTED KALMAN FILTER Oleh: Miftahuddin (1206 100 707) Dosen Pembimbing: Subchan, Ph.D Dr. Erna Apriliani, M.Si Abstrak Robot Mobil atau Mobile Robot adalah konstruksi
DESAIN PENGENDALIAN ROBOT MOBIL BERODA MENGGUNAKAN METODE SLIDING MODE CONTROL (SMC) Oleh: Ratnawati
 Oleh: Ratnawati") DESAIN PENGENDALIAN ROBOT MOBIL BERODA MENGGUNAKAN METODE SLIDING MODE CONTROL (SMC) Oleh: Ratnawati 1207 100 063 Dosen Pembimbing: Subchan, M.Sc, Ph.D Abstrak Kendaraan tanpa awak dalam bentuk robot mobil
DESAIN PENGENDALIAN ROBOT MOBIL BERODA MENGGUNAKAN METODE SLIDING MODE CONTROL (SMC) Oleh: Ratnawati 1207 100 063 Dosen Pembimbing: Subchan, M.Sc, Ph.D Abstrak Kendaraan tanpa awak dalam bentuk robot mobil
Proceeding Tugas Akhir-Januari
 Proceeding Tugas Akhir-Januari 214 1 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman, Trihastuti Agustinah Jurusan Teknik Elektro,
Proceeding Tugas Akhir-Januari 214 1 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman, Trihastuti Agustinah Jurusan Teknik Elektro,
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: ( Print) B-58
 ISSN: ( Print) B-58") JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-58 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman,
JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-58 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman,
Estimasi Posisi Mobile Robot Menggunakan Metode Akar Kuadrat Unscented Kalman Filter (AK-UKF)
") Estimasi Posisi Mobile Robot Menggunakan Metode Akar Kuadrat Unscented Kalman Filter (AK-UKF) Teguh Herlambang 1), Reizano Amri Rasyid 2), Sri Hartatik 3), Dinita Rahmalia 4) 1) Program Studi Sistem Informasi
Estimasi Posisi Mobile Robot Menggunakan Metode Akar Kuadrat Unscented Kalman Filter (AK-UKF) Teguh Herlambang 1), Reizano Amri Rasyid 2), Sri Hartatik 3), Dinita Rahmalia 4) 1) Program Studi Sistem Informasi
Perbandingan Metode Kalman Filter, Extended Kalman Filter, dan Ensemble Kalman Filter pada Model Penyebaran Virus HIV/AIDS
 J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 15, No. 1, Maret 2018, 17-29 Perbandingan Metode Kalman Filter, Extended Kalman Filter, dan Ensemble Kalman Filter pada Model Penyebaran
J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 15, No. 1, Maret 2018, 17-29 Perbandingan Metode Kalman Filter, Extended Kalman Filter, dan Ensemble Kalman Filter pada Model Penyebaran
KONTROL TRACKING FUZZY UNTUK SISTEM PENDULUM KERETA MENGGUNAKAN PENDEKATAN LINEAR MATRIX INEQUALITIES
 JURNAL TEKNIK ITS Vol. 4, No. 1, (15) ISSN: 337-3539 (31-971 Print) A-594 KONTROL TRACKING FUZZY UNTUK SISTEM PENDULUM KERETA MENGGUNAKAN PENDEKATAN LINEAR MATRIX INEQUALITIES Rizki Wijayanti, Trihastuti
JURNAL TEKNIK ITS Vol. 4, No. 1, (15) ISSN: 337-3539 (31-971 Print) A-594 KONTROL TRACKING FUZZY UNTUK SISTEM PENDULUM KERETA MENGGUNAKAN PENDEKATAN LINEAR MATRIX INEQUALITIES Rizki Wijayanti, Trihastuti
Kontrol Tracking Fuzzy untuk Sistem Pendulum Kereta Menggunakan Pendekatan Linear Matrix Inequalities
 JURNAL TEKNIK ITS Vol. 6, No. (17), 337-35 (31-98X Print) A49 Kontrol Tracking Fuzzy untuk Sistem Pendulum Kereta Menggunakan Pendekatan Linear Matrix Inequalities Rizki Wijayanti, Trihastuti Agustinah
JURNAL TEKNIK ITS Vol. 6, No. (17), 337-35 (31-98X Print) A49 Kontrol Tracking Fuzzy untuk Sistem Pendulum Kereta Menggunakan Pendekatan Linear Matrix Inequalities Rizki Wijayanti, Trihastuti Agustinah
LOGO OLEH : ANIKE PURBAWATI DOSEN PEMBIMBING : KATHERIN INDRIAWATI, ST.MT.
 LOGO Perancangan Sistem Pengendalian Tekanan Keluaran Steam Separator Dalam Upaya Peningkatan Kualitas Output Steam di PT. Pertamina Geothermal Energy area Kamojang, Jawa Barat OLEH : ANIKE PURBAWATI 2408100037
LOGO Perancangan Sistem Pengendalian Tekanan Keluaran Steam Separator Dalam Upaya Peningkatan Kualitas Output Steam di PT. Pertamina Geothermal Energy area Kamojang, Jawa Barat OLEH : ANIKE PURBAWATI 2408100037
WAKTU OPTIMUM PADA PELURU KENDALI DENGAN MANUVER AKHIR MENGHUNJAM VERTIKAL. Sari Cahyaningtias Dosen Pembimbing: Subchan, Ph.
 WAKTU OPTIMUM PADA PELURU KENDALI DENGAN MANUVER AKHIR MENGHUNJAM VERTIKAL Sari Cahyaningtias 1207 100 046 Dosen Pembimbing: Subchan, Ph.D Abstrak Peluru kendali adalah senjata berpanduan dan didesain
WAKTU OPTIMUM PADA PELURU KENDALI DENGAN MANUVER AKHIR MENGHUNJAM VERTIKAL Sari Cahyaningtias 1207 100 046 Dosen Pembimbing: Subchan, Ph.D Abstrak Peluru kendali adalah senjata berpanduan dan didesain
PERANCANGAN MODEL PREDICTIVE CONTROL (MPC) PADA PROSES QUADRUPLE TANK
 PADA PROSES QUADRUPLE TANK") PERANCANGAN MODEL PREDICTIVE CONTROL (MPC) PADA PROSES QUADRUPLE TANK Trio Bowo Setiyo *), Aris Triwiyatno, and Sumardi Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus
PERANCANGAN MODEL PREDICTIVE CONTROL (MPC) PADA PROSES QUADRUPLE TANK Trio Bowo Setiyo *), Aris Triwiyatno, and Sumardi Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus
Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe 1 Untuk Sistem Pendulum Kereta
 Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe Untuk Sistem Pendulum Kereta Helvin Indrawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe Untuk Sistem Pendulum Kereta Helvin Indrawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
IMPLEMENTASI ENSEMBLE KALMAN FILTER PADA ESTIMASI KECEPATAN KAPAL SELAM
 SIDANG TUGAS AKHIR IMPLEMENTASI ENSEMBLE KALMAN FILTER PADA ESTIMASI KEEPATAN KAPAL SELAM Oleh: RISA FITRIA 57 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
SIDANG TUGAS AKHIR IMPLEMENTASI ENSEMBLE KALMAN FILTER PADA ESTIMASI KEEPATAN KAPAL SELAM Oleh: RISA FITRIA 57 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID OPTIMAL UNTUK TRACKING LINTASAN GERAKAN LATERAL PADA UAV (UNMANNED AERIAL VEHICLE)
") PERANCANGAN DAN IMPLEMENTASI KONTROLER PID OPTIMAL UNTUK TRACKING LINTASAN GERAKAN LATERAL PADA UAV (UNMANNED AERIAL VEHICLE) Rahmat Fauzi - 0906077 Jurusan Teknik Elektro-FTI, Institut Teknologi Sepuluh
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID OPTIMAL UNTUK TRACKING LINTASAN GERAKAN LATERAL PADA UAV (UNMANNED AERIAL VEHICLE) Rahmat Fauzi - 0906077 Jurusan Teknik Elektro-FTI, Institut Teknologi Sepuluh
ANALISIS DAN SIMULASI PENGENDALI ROBOT POLAR DERAJAT KEBEBASAN DUA MENGGUNAKAN SLIDING MODE CONTROL (SMC)
") ANALISIS DAN SIMULASI PENGENDALI ROBOT POLAR DERAJAT KEBEBASAN DUA MENGGUNAKAN SLIDING MODE CONTROL (SMC) Pembimbing : Subchan, M.Sc. Ph.D. Drs. Kamiran, M.Si. NASHRUL MILLAH-0800707 Jurusan Matematika
ANALISIS DAN SIMULASI PENGENDALI ROBOT POLAR DERAJAT KEBEBASAN DUA MENGGUNAKAN SLIDING MODE CONTROL (SMC) Pembimbing : Subchan, M.Sc. Ph.D. Drs. Kamiran, M.Si. NASHRUL MILLAH-0800707 Jurusan Matematika
PERANCANGAN MODEL PREDICTIVE CONTROL (MPC) PADA PROSES QUADRUPLE TANK
 PADA PROSES QUADRUPLE TANK") PERANCANGAN MODEL PREDICTIVE CONTROL (MPC) PADA PROSES QUADRUPLE TANK Trio Bowo Setiyo *), Aris Triwiyatno, dan Sumardi Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus
PERANCANGAN MODEL PREDICTIVE CONTROL (MPC) PADA PROSES QUADRUPLE TANK Trio Bowo Setiyo *), Aris Triwiyatno, dan Sumardi Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus
Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid
 Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid Made Rahmawaty, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid Made Rahmawaty, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
DESAIN SISTEM KENDALI GERAK SURGE DAN ROLL PADA SISTEM AUTONOMOUS UNDERWATER VEHICLE DENGAN METODE SLIDING MODE CONTROL (SMC)
") PROSEDING DESAIN SISTEM KENDALI GERAK SURGE DAN ROLL PADA SISTEM AUTONOMOUS UNDERWATER VEHICLE DENGAN METODE SLIDING MODE CONTROL (SMC) Teguh Herlambang, Hendro Nurhadi Program Studi Sistem Informasi Universitas
PROSEDING DESAIN SISTEM KENDALI GERAK SURGE DAN ROLL PADA SISTEM AUTONOMOUS UNDERWATER VEHICLE DENGAN METODE SLIDING MODE CONTROL (SMC) Teguh Herlambang, Hendro Nurhadi Program Studi Sistem Informasi Universitas
Abdul Halim Dosen Pembimbing Dr. Trihastuti Agustinah, ST., MT
 Abdul Halim 22 05 053 Dosen Pembimbing Dr. Trihastuti Agustinah, ST., T JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 203 PENDAHULUAN PERANCANGAN HASIL
Abdul Halim 22 05 053 Dosen Pembimbing Dr. Trihastuti Agustinah, ST., T JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 203 PENDAHULUAN PERANCANGAN HASIL
PENERAPAN DISTURBANCE COMPENSATING MODEL PREDICTIVE CONTROL (DC-MPC) PADA KENDALI GERAK KAPAL
 PADA KENDALI GERAK KAPAL") PENERAPAN DISTURBANCE COMPENSATING MODEL PREDICTIVE CONTROL (DC-MPC) PADA KENDALI GERAK KAPAL Nama : Sari Cahyaningtias NRP : 1211 21 28 Jurusan : Matematika Dosen Pembimbing : Subchan, PhD ABSTRAK Pada
PENERAPAN DISTURBANCE COMPENSATING MODEL PREDICTIVE CONTROL (DC-MPC) PADA KENDALI GERAK KAPAL Nama : Sari Cahyaningtias NRP : 1211 21 28 Jurusan : Matematika Dosen Pembimbing : Subchan, PhD ABSTRAK Pada
Penerapan Multi-Agent Model Predictive Control (MPC) untuk Optimasi Waktu Hijau pada Jaringan Lalu Lintas Perkotaan
 untuk Optimasi Waktu Hijau pada Jaringan Lalu Lintas Perkotaan") Penerapan Multi-Agent Model Predictive Control (MPC) untuk Optimasi Waktu Hijau pada Jaringan Lalu Lintas Perkotaan Zendhiastara Arthananda, Subchan 2, dan Kamiran 3 Jurusan Matematika, Fakultas MIPA,
Penerapan Multi-Agent Model Predictive Control (MPC) untuk Optimasi Waktu Hijau pada Jaringan Lalu Lintas Perkotaan Zendhiastara Arthananda, Subchan 2, dan Kamiran 3 Jurusan Matematika, Fakultas MIPA,
KINEMATIKA. Fisika. Tim Dosen Fisika 1, ganjil 2016/2017 Program Studi S1 - Teknik Telekomunikasi Fakultas Teknik Elektro - Universitas Telkom
 KINEMATIKA Fisika Tim Dosen Fisika 1, ganjil 2016/2017 Program Studi S1 - Teknik Telekomunikasi Fakultas Teknik Elektro - Universitas Telkom Sasaran Pembelajaran Indikator: Mahasiswa mampu mencari besaran
KINEMATIKA Fisika Tim Dosen Fisika 1, ganjil 2016/2017 Program Studi S1 - Teknik Telekomunikasi Fakultas Teknik Elektro - Universitas Telkom Sasaran Pembelajaran Indikator: Mahasiswa mampu mencari besaran
Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe 1 untuk Sistem Pendulum-Kereta
 JURNAL TEKNIK POMITS Vol., No., () ISSN: 7-59 (-97 Print) B-7 Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe untuk Sistem Pendulum-Kereta Helvin Indrawati dan Trihastuti Agustinah Jurusan Teknik
JURNAL TEKNIK POMITS Vol., No., () ISSN: 7-59 (-97 Print) B-7 Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe untuk Sistem Pendulum-Kereta Helvin Indrawati dan Trihastuti Agustinah Jurusan Teknik
PENGENDALIAN GERAK ROBOT MOBIL BERPENGGERAK DIFFERENSIAL BERDASARKAN METODE TRACKING CONTROL BERBASIS PROPORTIONAL DERIVATIVE (PD)
") PENGENDALIAN GERAK ROBOT MOBIL BERPENGGERAK DIFFERENSIAL BERDASARKAN METODE TRACKING CONTROL BERBASIS PROPORTIONAL DERIVATIVE (PD) Robot Mobil DDMR Latar belakang Rumusan masalah Batasan masalah tujuan
PENGENDALIAN GERAK ROBOT MOBIL BERPENGGERAK DIFFERENSIAL BERDASARKAN METODE TRACKING CONTROL BERBASIS PROPORTIONAL DERIVATIVE (PD) Robot Mobil DDMR Latar belakang Rumusan masalah Batasan masalah tujuan
TUGAS AKHIR. ESTIMASI POSISI MAGNETIC LEVITATION BALL MENGGUNAKAN METODE ENSEMBLE KALMAN FILTER (EnKF) Oleh: ARIEF RACHMAN
 Oleh: ARIEF RACHMAN") TUGAS AKHIR ESTIMASI POSISI MAGNETIC LEVITATION BALL MENGGUNAKAN METODE ENSEMBLE KALMAN FILTER (EnKF) Oleh: ARIEF RACHMAN 1206 100 710 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT
TUGAS AKHIR ESTIMASI POSISI MAGNETIC LEVITATION BALL MENGGUNAKAN METODE ENSEMBLE KALMAN FILTER (EnKF) Oleh: ARIEF RACHMAN 1206 100 710 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT
ANALISIS MODEL KINEMATIK PELURU KENDALI PADA PENEMBAKAN TARGET MENGGUNAKAN METODE KENDALI OPTIMAL
 ANALISIS MODEL KINEMATIK PELURU KENDALI PADA PENEMBAKAN TARGET MENGGUNAKAN METODE KENDALI OPTIMAL Pembimbing : Subchan, M.Sc. Ph.D. Drs. Kamiran, M.Si. RESTU TRI ASTUTI-1208 100 033 Jurusan Matematika
ANALISIS MODEL KINEMATIK PELURU KENDALI PADA PENEMBAKAN TARGET MENGGUNAKAN METODE KENDALI OPTIMAL Pembimbing : Subchan, M.Sc. Ph.D. Drs. Kamiran, M.Si. RESTU TRI ASTUTI-1208 100 033 Jurusan Matematika
Optimasi Pada Misil Menggunakan Bang-Bang Control Dan Ensamble Kalman Filter
 Optimasi Pada Misil Menggunakan Bang-Bang Control Dan Ensamble Kalman Filter Ahmad Zaenal Arifin Jurusan Matematika, Fakultas MIPA, Universitas PGRI Ronggolawe Tuban (UNIROW) E-Mail: kuyafira@gmail.com
Optimasi Pada Misil Menggunakan Bang-Bang Control Dan Ensamble Kalman Filter Ahmad Zaenal Arifin Jurusan Matematika, Fakultas MIPA, Universitas PGRI Ronggolawe Tuban (UNIROW) E-Mail: kuyafira@gmail.com
PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni
 Oleh : Ika Evi Anggraeni") PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni 206 00 03 Dosen Pembimbing : Dr. Erna Apriliani, M.Si Hendra Cordova, ST,
PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni 206 00 03 Dosen Pembimbing : Dr. Erna Apriliani, M.Si Hendra Cordova, ST,
ANALISA DAN SIMULASI MODEL QUATERNION UNTUK KESEIMBANGAN PESAWAT TERBANG
 ANALISA DAN SIMULASI MODEL QUATERNION UNTUK KESEIMBANGAN PESAWAT TERBANG Dosen Pembimbing: Drs. Kamiran, M.Si RIZKI FAUZIAH 1209100028 JURUSAN MATEMATIKA ITS FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
ANALISA DAN SIMULASI MODEL QUATERNION UNTUK KESEIMBANGAN PESAWAT TERBANG Dosen Pembimbing: Drs. Kamiran, M.Si RIZKI FAUZIAH 1209100028 JURUSAN MATEMATIKA ITS FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
Desain Kontroler Fuzzy untuk Sistem Gantry Crane
 JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) A-75 Desain Kontroler Fuzzy untuk Sistem Gantry Crane Rosita Melindawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi
JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) A-75 Desain Kontroler Fuzzy untuk Sistem Gantry Crane Rosita Melindawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi
KINEMATIKA GERAK 1 PERSAMAAN GERAK
 KINEMATIKA GERAK 1 PERSAMAAN GERAK Posisi titik materi dapat dinyatakan dengan sebuah VEKTOR, baik pada suatu bidang datar maupun dalam bidang ruang. Vektor yang dipergunakan untuk menentukan posisi disebut
KINEMATIKA GERAK 1 PERSAMAAN GERAK Posisi titik materi dapat dinyatakan dengan sebuah VEKTOR, baik pada suatu bidang datar maupun dalam bidang ruang. Vektor yang dipergunakan untuk menentukan posisi disebut
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: ( Print) B-47
 ISSN: ( Print) B-47") JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-47 Swing-Up menggunakan Energy Control Method dan Stabilisasi Menggunakan Fuzzy-LQR pada Pendulum Cart System Agus Lesmana,
JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-47 Swing-Up menggunakan Energy Control Method dan Stabilisasi Menggunakan Fuzzy-LQR pada Pendulum Cart System Agus Lesmana,
BAB I PENDAHULUAN Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1. Latar Belakang Masalah Pada masa ini perkembangan ilmu pengetahuan dan teknologi sudah semakin maju, termasuk di bidang transportasi. Namun seiring dengan kemajuannya muncul pula
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah Pada masa ini perkembangan ilmu pengetahuan dan teknologi sudah semakin maju, termasuk di bidang transportasi. Namun seiring dengan kemajuannya muncul pula
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) 1-6 1
 1-6 1") JURNAL TEKNIK POMITS Vol., No., (23) -6 Pengendalian Rasio Bahan Bakar dan Udara Pada Boiler Menggunakan Metode Kontrol Optimal Linier Quadratic Regulator (LQR) Virtu Adila, Rusdhianto Effendie AK, Eka
JURNAL TEKNIK POMITS Vol., No., (23) -6 Pengendalian Rasio Bahan Bakar dan Udara Pada Boiler Menggunakan Metode Kontrol Optimal Linier Quadratic Regulator (LQR) Virtu Adila, Rusdhianto Effendie AK, Eka
Desain Kontroler Fuzzy untuk Sistem Gantry Crane
 1 Desain Kontroler Fuzzy untuk Sistem Gantry Crane Rosita Melindawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim,
1 Desain Kontroler Fuzzy untuk Sistem Gantry Crane Rosita Melindawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim,
Karena hanya mempelajari gerak saja dan pergerakannya hanya dalam satu koordinat (sumbu x saja atau sumbu y saja), maka disebut sebagai gerak
, maka disebut sebagai gerak") BAB I. GERAK Benda dikatakan melakukan gerak lurus jika lintasan yang ditempuhnya membentuk garis lurus. Ilmu Fisika yang mempelajari tentang gerak tanpa mempelajari penyebab gerak tersebut adalah KINEMATIKA.
BAB I. GERAK Benda dikatakan melakukan gerak lurus jika lintasan yang ditempuhnya membentuk garis lurus. Ilmu Fisika yang mempelajari tentang gerak tanpa mempelajari penyebab gerak tersebut adalah KINEMATIKA.
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI Pada bab ini akan dijelaskan mengenai teori teori yang berhubungan dengan pembahasan ini sehingga dapat dijadikan sebagai landasan berpikir dan akan mempermudah dalam hal pembahasan
BAB 2 LANDASAN TEORI Pada bab ini akan dijelaskan mengenai teori teori yang berhubungan dengan pembahasan ini sehingga dapat dijadikan sebagai landasan berpikir dan akan mempermudah dalam hal pembahasan
Pembahasan Matematika IPA SNMPTN 2012 Kode 132
 Tutur Widodo Pembahasan Matematika IPA SNMPTN 0 Pembahasan Matematika IPA SNMPTN 0 Kode Oleh Tutur Widodo. Lingkaran (x 6) + (y + ) = menyinggung garis x = di titik... (, 6) d. (, ) (, 6) e. (, ) c. (,
Tutur Widodo Pembahasan Matematika IPA SNMPTN 0 Pembahasan Matematika IPA SNMPTN 0 Kode Oleh Tutur Widodo. Lingkaran (x 6) + (y + ) = menyinggung garis x = di titik... (, 6) d. (, ) (, 6) e. (, ) c. (,
SEMINAR TUGAS AKHIR. Penerapan Metode Ensemble Kalman Filter untuk Estimasi Kecepatan dan Ketinggian Gelombang Non Linear pada Pantai
 SEMINAR TUGAS AKHIR Penerapan Metode Ensemble Kalman Filter untuk Estimasi Kecepatan dan Ketinggian Gelombang Non Linear pada Pantai Oleh: Fadila Rahmana 1208 100 044 Abstrak Gelombang laut telah menjadi
SEMINAR TUGAS AKHIR Penerapan Metode Ensemble Kalman Filter untuk Estimasi Kecepatan dan Ketinggian Gelombang Non Linear pada Pantai Oleh: Fadila Rahmana 1208 100 044 Abstrak Gelombang laut telah menjadi
Keep running VEKTOR. 3/8/2007 Fisika I 1
 VEKTOR 3/8/007 Fisika I 1 BAB I : VEKTOR Besaran vektor adalah besaran yang terdiri dari dua variabel, yaitu besar dan arah. Sebagai contoh dari besaran vektor adalah perpindahan. Sebuah besaran vektor
VEKTOR 3/8/007 Fisika I 1 BAB I : VEKTOR Besaran vektor adalah besaran yang terdiri dari dua variabel, yaitu besar dan arah. Sebagai contoh dari besaran vektor adalah perpindahan. Sebuah besaran vektor
HALAMAN JUDUL KONTROL TRACKING OPTIMAL UNTUK ROBOT PENDULUM TERBALIK BERODA DUA
 HALAMAN JUDUL TUGAS AKHIR TE 141599 KONTROL TRACKING OPTIMAL UNTUK ROBOT PENDULUM TERBALIK BERODA DUA Luthfi Arfiansyah NRP 2213 106 048 Dosen Pembimbing Dr. Trihastuti Agustinah, ST., MT. Mochammad Sahal,
HALAMAN JUDUL TUGAS AKHIR TE 141599 KONTROL TRACKING OPTIMAL UNTUK ROBOT PENDULUM TERBALIK BERODA DUA Luthfi Arfiansyah NRP 2213 106 048 Dosen Pembimbing Dr. Trihastuti Agustinah, ST., MT. Mochammad Sahal,
Diferensial Vektor. (Pertemuan III) Dr. AZ Jurusan Teknik Sipil Fakultas Teknik Universitas Brawijaya
 Dr. AZ Jurusan Teknik Sipil Fakultas Teknik Universitas Brawijaya") TKS 4007 Matematika III Diferensial Vektor (Pertemuan III) Dr. AZ Jurusan Teknik Sipil Fakultas Teknik Universitas Brawijaya Perkalian Titik Perkalian titik dari dua buah vektor A dan B pada bidang dinyatakan
TKS 4007 Matematika III Diferensial Vektor (Pertemuan III) Dr. AZ Jurusan Teknik Sipil Fakultas Teknik Universitas Brawijaya Perkalian Titik Perkalian titik dari dua buah vektor A dan B pada bidang dinyatakan
BAB 4 EVALUASI DAN ANALISA DATA
 BAB 4 EVALUASI DAN ANALISA DATA Pada bab ini akan dibahas tentang evaluasi dan analisa data yang terdapat pada penelitian yang dilakukan. 4.1 Evaluasi inverse dan forward kinematik Pada bagian ini dilakukan
BAB 4 EVALUASI DAN ANALISA DATA Pada bab ini akan dibahas tentang evaluasi dan analisa data yang terdapat pada penelitian yang dilakukan. 4.1 Evaluasi inverse dan forward kinematik Pada bagian ini dilakukan
OPTIMASI FUNGSI MULTI VARIABEL DENGAN METODE UNIVARIATE. Dwi Suraningsih (M ), Marifatun (M ), Nisa Karunia (M )
, Marifatun (M ), Nisa Karunia (M )") OPTIMASI FUNGSI MULTI VARIABEL DENGAN METODE UNIVARIATE Dwi Suraningsih (M2, Marifatun (M53, Nisa Karunia (M6 I. Pendahuluan Latar Belakang. Dalam kehidupan sehari-hari disa maupun tidak, sebenarnya manusia
OPTIMASI FUNGSI MULTI VARIABEL DENGAN METODE UNIVARIATE Dwi Suraningsih (M2, Marifatun (M53, Nisa Karunia (M6 I. Pendahuluan Latar Belakang. Dalam kehidupan sehari-hari disa maupun tidak, sebenarnya manusia
OPTIMASI PENCAPAIAN TARGET PADA SIMULASI PERENCANAAN JALUR ROBOT BERGERAK DI LINGKUNGAN DINAMIS
 OPTIMASI PENCAPAIAN TARGET PADA SIMULASI PERENCANAAN JALUR ROBOT BERGERAK DI LINGKUNGAN DINAMIS Yisti Vita Via Jurusan Teknik Informatika, Fakultas Teknologi Informasi, Institut Teknologi Sepuluh Nopember
OPTIMASI PENCAPAIAN TARGET PADA SIMULASI PERENCANAAN JALUR ROBOT BERGERAK DI LINGKUNGAN DINAMIS Yisti Vita Via Jurusan Teknik Informatika, Fakultas Teknologi Informasi, Institut Teknologi Sepuluh Nopember
Fisika Dasar 9/1/2016
 1 Sasaran Pembelajaran 2 Mahasiswa mampu mencari besaran posisi, kecepatan, dan percepatan sebuah partikel untuk kasus 1-dimensi dan 2-dimensi. Kinematika 3 Cabang ilmu Fisika yang membahas gerak benda
1 Sasaran Pembelajaran 2 Mahasiswa mampu mencari besaran posisi, kecepatan, dan percepatan sebuah partikel untuk kasus 1-dimensi dan 2-dimensi. Kinematika 3 Cabang ilmu Fisika yang membahas gerak benda
Perancangan dan Implementasi Kontroler PID untuk Pengaturan Autonomous Car-Following Car
 JURNAL TEKNIK POMITS Vol. 3, No., (204) ISSN: 2337-3539 (230-927 Print) E-3 Perancangan dan Implementasi Kontroler PID untuk Pengaturan Autonomous Car-Following Car Andreas Parluhutan Bonor Sinaga dan
JURNAL TEKNIK POMITS Vol. 3, No., (204) ISSN: 2337-3539 (230-927 Print) E-3 Perancangan dan Implementasi Kontroler PID untuk Pengaturan Autonomous Car-Following Car Andreas Parluhutan Bonor Sinaga dan
1. Fungsi Objektif z = ax + by
 Nilai Optimum Suatu Fungsi Objektif, Program Linear, Fungsi Objektif, Cara Menentukan, Contoh Soal, Rumus, Pembahasan, Metode Uji Titik Sudut, Metode Garis Selidik, Matematika Nilai Optimum Suatu Fungsi
Nilai Optimum Suatu Fungsi Objektif, Program Linear, Fungsi Objektif, Cara Menentukan, Contoh Soal, Rumus, Pembahasan, Metode Uji Titik Sudut, Metode Garis Selidik, Matematika Nilai Optimum Suatu Fungsi
PERANCANGAN MODEL PREDICTIVE CONTROL (MPC) PADA SISTEM PENDULUM TERBALIK
 PADA SISTEM PENDULUM TERBALIK") 73 PERANCANGAN MODEL PREDICTIVE CONTROL (MPC) PADA SISTEM PENDULUM TERBALIK Fakultas Teknik Elektro, Universitas Telkom cahyantarie@telkomuniversityacid Abstrak Model Predictive Control (MPC) memiliki
73 PERANCANGAN MODEL PREDICTIVE CONTROL (MPC) PADA SISTEM PENDULUM TERBALIK Fakultas Teknik Elektro, Universitas Telkom cahyantarie@telkomuniversityacid Abstrak Model Predictive Control (MPC) memiliki
DESAIN PENGENDALIAN PINTU AIR DENGAN METODE SLIDING MODE CONTROL (SMC)
") J. Math. and Its Appl. ISSN: 1829-605X Vol. 13, No. 1, Mei 2016, 13-22 DESAIN PENGENDALIAN PINTU AIR DENGAN METODE SLIDING MODE CONTROL (SMC) Moh. Fahmi Muzaki 1, Erna Apriliani 2, Sri Suprapti H 3 1,2,3
J. Math. and Its Appl. ISSN: 1829-605X Vol. 13, No. 1, Mei 2016, 13-22 DESAIN PENGENDALIAN PINTU AIR DENGAN METODE SLIDING MODE CONTROL (SMC) Moh. Fahmi Muzaki 1, Erna Apriliani 2, Sri Suprapti H 3 1,2,3
Pembahasan Matematika IPA SNMPTN 2012 Kode 483
 Tutur Widodo Pembahasan Matematika IPA SNMPTN 0 Pembahasan Matematika IPA SNMPTN 0 Kode 8 Oleh Tutur Widodo. Di dalam kotak terdapat bola biru, 6 bola merah dan bola putih. Jika diambil 8 bola tanpa pengembalian,
Tutur Widodo Pembahasan Matematika IPA SNMPTN 0 Pembahasan Matematika IPA SNMPTN 0 Kode 8 Oleh Tutur Widodo. Di dalam kotak terdapat bola biru, 6 bola merah dan bola putih. Jika diambil 8 bola tanpa pengembalian,
BAB 4 ANALISA SISTEM
 52 BAB 4 ANALISA SISTEM 4.1 Analisa Input Seperti yang dijelaskan pada bab sebelumnya, variabel - variabel input yang digunakan dalam program disesuaikan dengan rumus yang sudah didapat. Hal ini dimaksudkan
52 BAB 4 ANALISA SISTEM 4.1 Analisa Input Seperti yang dijelaskan pada bab sebelumnya, variabel - variabel input yang digunakan dalam program disesuaikan dengan rumus yang sudah didapat. Hal ini dimaksudkan
NAVIGASI DAN KENDALI PADA PESAWAT UDARA NIR AWAK (PUNA) UNTUK MENGHINDARI HALANGAN
 UNTUK MENGHINDARI HALANGAN") Limits J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 14, No. 1, Mei 2017, 73 87 NAVIGASI DAN KENDALI PADA PESAWAT UDARA NIR AWAK (PUNA) UNTUK MENGHINDARI HALANGAN Ahmad Zaenal Arifin
Limits J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 14, No. 1, Mei 2017, 73 87 NAVIGASI DAN KENDALI PADA PESAWAT UDARA NIR AWAK (PUNA) UNTUK MENGHINDARI HALANGAN Ahmad Zaenal Arifin
Dr. Ir. Bib Paruhum Silalahi, M.Kom
 Metode Descent Oleh : Andaikan fungsi tujuan kita adalah minf(x);x R n. Secara umum f(x) dapat berupa fungsi nonlinear. Metode-metode descent adalah metode iteratif untuk memperoleh solusi pendekatan dari
Metode Descent Oleh : Andaikan fungsi tujuan kita adalah minf(x);x R n. Secara umum f(x) dapat berupa fungsi nonlinear. Metode-metode descent adalah metode iteratif untuk memperoleh solusi pendekatan dari
OPTIMASI FUNGSI MULTIVARIABLE TANPA KENDALA DENGAN METODE NEWTON
 OPTIMASI FUNGSI MULTIVARIABLE TANPA KENDALA DENGAN METODE NEWTON Susi Ranangga [M008067], Aeroni Dwijayanti [M008078] Hamdani Citra P. [M0003], Nafi Nur Khasana [M00058]. Pendahuluan Dalam kehidupan sehari-hari
OPTIMASI FUNGSI MULTIVARIABLE TANPA KENDALA DENGAN METODE NEWTON Susi Ranangga [M008067], Aeroni Dwijayanti [M008078] Hamdani Citra P. [M0003], Nafi Nur Khasana [M00058]. Pendahuluan Dalam kehidupan sehari-hari
BAB 3 PENANGANAN JARINGAN KOMUNIKASI MULTIHOP TERKONFIGURASI SENDIRI UNTUK PAIRFORM-COMMUNICATION
 BAB 3 PENANGANAN JARINGAN KOMUNIKASI MULTIHOP TERKONFIGURASI SENDIRI UNTUK PAIRFORM-COMMUNICATION Bab ini akan menjelaskan tentang penanganan jaringan untuk komunikasi antara dua sumber yang berpasangan.
BAB 3 PENANGANAN JARINGAN KOMUNIKASI MULTIHOP TERKONFIGURASI SENDIRI UNTUK PAIRFORM-COMMUNICATION Bab ini akan menjelaskan tentang penanganan jaringan untuk komunikasi antara dua sumber yang berpasangan.
Matematika Dasar FUNGSI DAN GRAFIK
 FUNGSI DAN GRAFIK Suatu pengaitan dari himpunan A ke himpunan B disebut fungsi bila mengaitkan setiap anggota dari himpunan A dengan tepat satu anggota dari himpunan B. Notasi : f : A B f() y Himpunan
FUNGSI DAN GRAFIK Suatu pengaitan dari himpunan A ke himpunan B disebut fungsi bila mengaitkan setiap anggota dari himpunan A dengan tepat satu anggota dari himpunan B. Notasi : f : A B f() y Himpunan
Analisa Kinematik Secara Spatial Untuk Rack and Pinion pada Kendaraan Hybrid Roda Tiga Sapujagad 2
 JURNAL TEKNIK POMITS Vol. 1, No. 2, (214) ISSN: 231-9271 1 Analisa Kinematik Secara Spatial Untuk Rack and Pinion pada Kendaraan Hybrid Roda Tiga Sapujagad 2 Fachri Nugrahasyah Putra dan Unggul Wasiwitono
JURNAL TEKNIK POMITS Vol. 1, No. 2, (214) ISSN: 231-9271 1 Analisa Kinematik Secara Spatial Untuk Rack and Pinion pada Kendaraan Hybrid Roda Tiga Sapujagad 2 Fachri Nugrahasyah Putra dan Unggul Wasiwitono
Bab 16. LIMIT dan TURUNAN. Motivasi. Limit Fungsi. Fungsi Turunan. Matematika SMK, Bab 16: Limit dan Turunan 1/35
 Bab 16 Grafik LIMIT dan TURUNAN Matematika SMK, Bab 16: Limit dan 1/35 Grafik Pada dasarnya, konsep limit dikembangkan untuk mengerjakan perhitungan matematis yang melibatkan: nilai sangat kecil; Matematika
Bab 16 Grafik LIMIT dan TURUNAN Matematika SMK, Bab 16: Limit dan 1/35 Grafik Pada dasarnya, konsep limit dikembangkan untuk mengerjakan perhitungan matematis yang melibatkan: nilai sangat kecil; Matematika
UNIVERSITAS BINA NUSANTARA SIMULASI KINEMATIKA LENGAN ROBOT INDUSTRI DENGAN 6 DERAJAT KEBEBASAN
 UNIVERSITAS BINA NUSANTARA Jurusan Sistem Komputer Skripsi Sarjana Komputer Semester Genap tahun 2003/2004 SIMULASI KINEMATIKA LENGAN ROBOT INDUSTRI DENGAN 6 DERAJAT KEBEBASAN Andy Rosady 0400530056 Riza
UNIVERSITAS BINA NUSANTARA Jurusan Sistem Komputer Skripsi Sarjana Komputer Semester Genap tahun 2003/2004 SIMULASI KINEMATIKA LENGAN ROBOT INDUSTRI DENGAN 6 DERAJAT KEBEBASAN Andy Rosady 0400530056 Riza
PERANCANGAN MODEL PREDICTIVE TORQUE CONTROL (MPTC) UNTUK PENGATURAN KECEPATAN MOTOR INDUKSI 3 PHASA DENGAN ROBUST STATOR FLUX OBSERVER
 UNTUK PENGATURAN KECEPATAN MOTOR INDUKSI 3 PHASA DENGAN ROBUST STATOR FLUX OBSERVER") PERANCANGAN MODEL PREDICTIVE TORQUE CONTROL (MPTC) UNTUK PENGATURAN KECEPATAN MOTOR INDUKSI 3 PHASA DENGAN ROBUST STATOR FLUX OBSERVER Halim Mudia 1), Mochammad Rameli 2), dan Rusdhianto Efendi 3) 1),
PERANCANGAN MODEL PREDICTIVE TORQUE CONTROL (MPTC) UNTUK PENGATURAN KECEPATAN MOTOR INDUKSI 3 PHASA DENGAN ROBUST STATOR FLUX OBSERVER Halim Mudia 1), Mochammad Rameli 2), dan Rusdhianto Efendi 3) 1),
BAB IV PENGUJIAN ALGORITMA TRACKING
 BAB IV PENGUJIAN ALGORITMA TRACKING Pada Bab III sebelumnya telah dijelaskan mengenai pemodelan dalam Simulink yang dibuat untuk menguji algoritma Filter Kalman dalam sistem Radar Tracking dan juga algoritma
BAB IV PENGUJIAN ALGORITMA TRACKING Pada Bab III sebelumnya telah dijelaskan mengenai pemodelan dalam Simulink yang dibuat untuk menguji algoritma Filter Kalman dalam sistem Radar Tracking dan juga algoritma
a menunjukkan jumlah satuan skala relatif terhadap nol pada sumbu X Gambar 1
 1. Koordinat Cartesius Sistem koordinat Cartesius terdiri dari dua garis yang saling tegak lurus yang disebut sumbu Sumbu horizontal disebut sumbu X dan sumbu vertikal disebut sumbu Y Tiap sumbu mempunyai
1. Koordinat Cartesius Sistem koordinat Cartesius terdiri dari dua garis yang saling tegak lurus yang disebut sumbu Sumbu horizontal disebut sumbu X dan sumbu vertikal disebut sumbu Y Tiap sumbu mempunyai
BAB II KAJIAN PUSTAKA
 BAB II KAJIAN PUSTAKA A. Efektivitas Efektivitas berasal dari kata efektif, yang merupakan kata serapan dari bahasa Inggris yaitu effective yang artinya berhasil. Menurut kamus ilmiah popular, efektivitas
BAB II KAJIAN PUSTAKA A. Efektivitas Efektivitas berasal dari kata efektif, yang merupakan kata serapan dari bahasa Inggris yaitu effective yang artinya berhasil. Menurut kamus ilmiah popular, efektivitas
Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda
 E97 Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda Yansen Prayitno dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
E97 Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda Yansen Prayitno dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI. Sistem Pendulum Terbalik Dalam penelitian ini diperhatikan sistem pendulum terbalik seperti pada Gambar di mana sebuah pendulum terbalik dimuat dalam motor yang bisa digerakkan.
BAB II LANDASAN TEORI. Sistem Pendulum Terbalik Dalam penelitian ini diperhatikan sistem pendulum terbalik seperti pada Gambar di mana sebuah pendulum terbalik dimuat dalam motor yang bisa digerakkan.
SEMINAR TUGAS AKHIR PENERAPAN MULTI-AGENT MODEL PREDICTIVE CONTROL (MPC) UNTUK OPTIMASI WAKTU HIJAU PADA JARINGAN LALU LINTAS PERKOTAAN
 UNTUK OPTIMASI WAKTU HIJAU PADA JARINGAN LALU LINTAS PERKOTAAN") SEMINAR TUGAS AKHIR PENERAPAN MULTI-AGENT MODEL PREDITIVE ONTROL (MP) UNTUK OPTIMASI WAKTU HIJAU PADA JARINGAN LALU LINTAS PERKOTAAN Zendhiastara Arthananda (1210100032) Dosen Pembimbing 1: Subchan, PhD
SEMINAR TUGAS AKHIR PENERAPAN MULTI-AGENT MODEL PREDITIVE ONTROL (MP) UNTUK OPTIMASI WAKTU HIJAU PADA JARINGAN LALU LINTAS PERKOTAAN Zendhiastara Arthananda (1210100032) Dosen Pembimbing 1: Subchan, PhD
SYARAT FRITZ JOHN PADA MASALAH OPTIMASI BERKENDALA KETAKSAMAAN. Caturiyati 1 Himmawati Puji Lestari 2. Abstrak
 Syarat Fritz John... (Caturiyati) SYARAT FRITZ JOHN PADA MASALAH OPTIMASI BERKENDALA KETAKSAMAAN Caturiyati 1 Himmawati Puji Lestari 2 1,2 Jurusan Pendidikan Matematika FMIPA UNY 1 wcaturiyati@yahoo.com
Syarat Fritz John... (Caturiyati) SYARAT FRITZ JOHN PADA MASALAH OPTIMASI BERKENDALA KETAKSAMAAN Caturiyati 1 Himmawati Puji Lestari 2 1,2 Jurusan Pendidikan Matematika FMIPA UNY 1 wcaturiyati@yahoo.com
Implementasi Ensemble Kalman Filter (Enkf) Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler
 Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler") Implementasi Ensemble Kalman Filter (Enkf) Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler Ahmad Nasrullah Jamaludin 1, Erna Apriliani 1, Hendra Cordova 2, Teguh Herlambang 3 1
Implementasi Ensemble Kalman Filter (Enkf) Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler Ahmad Nasrullah Jamaludin 1, Erna Apriliani 1, Hendra Cordova 2, Teguh Herlambang 3 1
Waktu Optimal dalam Diversifikasi Produksi Sumber Energi Terbarukan dan Tidak Terbarukan Dengan Menggunakan Prinsip Minimum Pontryagin
 Waktu Optimal dalam Diversifikasi Produksi Sumber Energi Terbarukan dan Tidak Terbarukan Dengan Menggunakan Prinsip Minimum Pontryagin Oleh: Misbahur Khoir 1210 100 041 Dosen Pembimbing: Subchan, Ph.D
Waktu Optimal dalam Diversifikasi Produksi Sumber Energi Terbarukan dan Tidak Terbarukan Dengan Menggunakan Prinsip Minimum Pontryagin Oleh: Misbahur Khoir 1210 100 041 Dosen Pembimbing: Subchan, Ph.D
PERENCANAAN LINTASAN MENGGUNAKAN DUBINS GEOMETRY PADA PESAWAT UDARA NIR AWAK ( PUNA )
") PERENCANAAN LINTASAN MENGGUNAKAN DUBINS GEOMETRY PADA PESAWAT UDARA NIR AWAK ( PUNA ) Nama Mahasiswa : Norma Kumala Dewi NRP : 1206 100 006 Jurusan : Matematika FMIPA-ITS Dosen Pembimbing : Subchan, Ph.D
PERENCANAAN LINTASAN MENGGUNAKAN DUBINS GEOMETRY PADA PESAWAT UDARA NIR AWAK ( PUNA ) Nama Mahasiswa : Norma Kumala Dewi NRP : 1206 100 006 Jurusan : Matematika FMIPA-ITS Dosen Pembimbing : Subchan, Ph.D
Kinematika Gerak KINEMATIKA GERAK. Sumber:
 Kinematika Gerak B a b B a b 1 KINEMATIKA GERAK Sumber: www.jatim.go.id Jika kalian belajar fisika maka kalian akan sering mempelajari tentang gerak. Fenomena tentang gerak memang sangat menarik. Coba
Kinematika Gerak B a b B a b 1 KINEMATIKA GERAK Sumber: www.jatim.go.id Jika kalian belajar fisika maka kalian akan sering mempelajari tentang gerak. Fenomena tentang gerak memang sangat menarik. Coba
Pengendali Temperatur Fluida Pada Heat Exchanger Dengan Menggunakan Algoritma Model Predictive Control (MPC)
") JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: 2337-3539 (2301-9271 Print) A-134 Pengendali Temperatur Fluida Pada Heat Exchanger Dengan Menggunakan Algoritma Model Predictive Control (MPC) Fathimah
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: 2337-3539 (2301-9271 Print) A-134 Pengendali Temperatur Fluida Pada Heat Exchanger Dengan Menggunakan Algoritma Model Predictive Control (MPC) Fathimah
Latar belakang : Pesawat Udara Nir Awak lebih efektif dan efisien. Masalah navigasi, pemandu, dan kontrol. Pemandu. Pythagorean Hodograph
 Latar belakang : Pesawat Udara Nir Awak lebih efektif dan efisien Masalah navigasi, pemandu, dan kontrol Pemandu Pythagorean Hodograph Lintasan pesawat Perumusan Masalah : Bagaimana merancang algoritma
Latar belakang : Pesawat Udara Nir Awak lebih efektif dan efisien Masalah navigasi, pemandu, dan kontrol Pemandu Pythagorean Hodograph Lintasan pesawat Perumusan Masalah : Bagaimana merancang algoritma
1. Jika f ( x ) = sin² ( 2x + ), maka nilai f ( 0 ) =. a. 2 b. 2 c. 2. Diketahui f(x) = sin³ (3 2x). Turunan pertama fungsi f adalah f (x) =.
 = sin² ( 2x + ), maka nilai f ( 0 ) =. a. 2 b. 2 c. 2. Diketahui f(x) = sin³ (3 2x). Turunan pertama fungsi f adalah f (x) =.") 1. Jika f ( x ) sin² ( 2x + ), maka nilai f ( 0 ). a. 2 b. 2 c. d. e. 2. Diketahui f(x) sin³ (3 2x). Turunan pertama fungsi f adalah f (x). a. 6 sin² (3 2x) cos (3 2x) b. 3 sin² (3 2x) cos (3 2x) c. 2
1. Jika f ( x ) sin² ( 2x + ), maka nilai f ( 0 ). a. 2 b. 2 c. d. e. 2. Diketahui f(x) sin³ (3 2x). Turunan pertama fungsi f adalah f (x). a. 6 sin² (3 2x) cos (3 2x) b. 3 sin² (3 2x) cos (3 2x) c. 2
ALGORITMA ADAPTIVE COVARIANCE RANK UNSCENTED KALMAN FILTER UNTUK ESTIMASI KEADAAN PADA PERSAMAAN AIR DANGKAL
 ALGORITMA ADAPTIVE COVARIANCE RANK UNSCENTED KALMAN FILTER UNTUK ESTIMASI KEADAAN PADA PERSAMAAN AIR DANGKAL Habib Hasbullah 1, Erna Apriliani 2 1 Mahasiswa Program Studi S2, Jurusan Matematika, F-MIPA,
ALGORITMA ADAPTIVE COVARIANCE RANK UNSCENTED KALMAN FILTER UNTUK ESTIMASI KEADAAN PADA PERSAMAAN AIR DANGKAL Habib Hasbullah 1, Erna Apriliani 2 1 Mahasiswa Program Studi S2, Jurusan Matematika, F-MIPA,
Analisis dan Kontrol Optimal Sistem Gerak Satelit Menggunakan Prinsip Minimum Pontryagin
 JURNAL SAINS DAN SENI POMITS Vol. 6, No.2, (2017) 2337-3520 (2301-928X Print) A 45 Analisis dan Kontrol Optimal Sistem Gerak Satelit Menggunakan Prinsip Minimum Pontryagin Putri Saraswati, Mardlijah, Kamiran
JURNAL SAINS DAN SENI POMITS Vol. 6, No.2, (2017) 2337-3520 (2301-928X Print) A 45 Analisis dan Kontrol Optimal Sistem Gerak Satelit Menggunakan Prinsip Minimum Pontryagin Putri Saraswati, Mardlijah, Kamiran
KARAKTERISTIK PERSAMAAN ALJABAR RICCATI DAN PENERAPANNYA PADA MASALAH KENDALI
 Prosiding Seminar Nasional Penelitian, Pendidikan dan Penerapan MIPA, Fakultas MIPA, Universitas Negeri Yogyakarta, 4 Mei 0 KARAKTERISTIK PERSAMAAN ALJABAR RICCATI DAN PENERAPANNYA PADA MASALAH KENDALI
Prosiding Seminar Nasional Penelitian, Pendidikan dan Penerapan MIPA, Fakultas MIPA, Universitas Negeri Yogyakarta, 4 Mei 0 KARAKTERISTIK PERSAMAAN ALJABAR RICCATI DAN PENERAPANNYA PADA MASALAH KENDALI
Bab 3 PERUMUSAN MODEL KINEMATIK DDMR
 Ba 3 PERUMUSAN MODEL KINEMATIK DDMR Model kinematika diperlukan dalam menganalisis pergerakan suatu root moil. Model kinematik merupakan analisis pergerakan sistem yang direpresentasikan secara matematis
Ba 3 PERUMUSAN MODEL KINEMATIK DDMR Model kinematika diperlukan dalam menganalisis pergerakan suatu root moil. Model kinematik merupakan analisis pergerakan sistem yang direpresentasikan secara matematis
Penentuan Koefisien Daya Angkat Pesawat Terbang Layang Terhadap Gerakan Angin Vertikal
 J. Math. and Its Appl. ISSN: 1829-605X Vol. 2, No. 1, May. 2005, 9 16 Penentuan Koefisien Daya Angkat Pesawat Terbang Layang Terhadap Gerakan Angin Vertikal Yatini, E. Apriliani, Soetrisno Jurusan Matematika
J. Math. and Its Appl. ISSN: 1829-605X Vol. 2, No. 1, May. 2005, 9 16 Penentuan Koefisien Daya Angkat Pesawat Terbang Layang Terhadap Gerakan Angin Vertikal Yatini, E. Apriliani, Soetrisno Jurusan Matematika
PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN ALGORITMA MODEL PREDICTIVE CONTROL (MPC)
") PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN ALGORITMA MODEL PREDICTIVE CONTROL (MPC) Fathimah Ekasari M, Rusdhianto Effendi AK., Eka Iskandar Jurusan Teknik Elektro, Fakultas Teknologi
PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN ALGORITMA MODEL PREDICTIVE CONTROL (MPC) Fathimah Ekasari M, Rusdhianto Effendi AK., Eka Iskandar Jurusan Teknik Elektro, Fakultas Teknologi
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Sistem berskala besar (Large-Scale System) adalah suatu sistem yang dibangun oleh beberapa subsistem yang saling berinteraksi satu sama lain. Terdapat beberapa pendekatan
BAB I PENDAHULUAN 1.1 Latar Belakang Sistem berskala besar (Large-Scale System) adalah suatu sistem yang dibangun oleh beberapa subsistem yang saling berinteraksi satu sama lain. Terdapat beberapa pendekatan
DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY
 DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY Reza Dwi Imami *), Aris Triwiyatno, and Sumardi Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus
DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY Reza Dwi Imami *), Aris Triwiyatno, and Sumardi Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus
Penggunaan Penyelesaian Persamaan Riccati Aljabar Waktu Diskrit pada Kendali Optimal Linier Kuadratik dan Sifat-Sifatnya
 JURNAL SANS DAN SEN POMTS Vol. 2, No.1, (213) 2337-352 1 Penggunaan Penyelesaian Persamaan Riccati Aljabar Waktu Diskrit pada Kendali Optimal Linier Kuadratik dan Sifat-Sifatnya Dita Marsa Yuanita, Soleha
JURNAL SANS DAN SEN POMTS Vol. 2, No.1, (213) 2337-352 1 Penggunaan Penyelesaian Persamaan Riccati Aljabar Waktu Diskrit pada Kendali Optimal Linier Kuadratik dan Sifat-Sifatnya Dita Marsa Yuanita, Soleha
APLIKASI TURUNAN ALJABAR. Tujuan Pembelajaran. ) kemudian menyentuh bukit kedua pada titik B(x 2
 kemudian menyentuh bukit kedua pada titik B(x 2") Kurikulum 3/6 matematika K e l a s XI APLIKASI TURUNAN ALJABAR Tujuan Pembelajaran Setelah mempelajari materi ini, kamu diharapkan memiliki kemampuan berikut.. Dapat menerapkan aturan turunan aljabar untuk
Kurikulum 3/6 matematika K e l a s XI APLIKASI TURUNAN ALJABAR Tujuan Pembelajaran Setelah mempelajari materi ini, kamu diharapkan memiliki kemampuan berikut.. Dapat menerapkan aturan turunan aljabar untuk
Bab 2 LANDASAN TEORI. 2.1 Pengantar Proses Stokastik
 Bab 2 LANDASAN TEORI Pada bab ini akan diberikan penjelasan singkat mengenai pengantar proses stokastik dan rantai Markov, yang akan digunakan untuk analisis pada bab-bab selanjutnya. 2.1 Pengantar Proses
Bab 2 LANDASAN TEORI Pada bab ini akan diberikan penjelasan singkat mengenai pengantar proses stokastik dan rantai Markov, yang akan digunakan untuk analisis pada bab-bab selanjutnya. 2.1 Pengantar Proses
Waktu Optimal Dalam Diversifikasi Produksi Sumber Energi Terbarukan dan Tidak Terbarukan dengan Menggunakan Prinsip Minimum Pontryagin
 JURNAL SAINS DAN SENI POMITS Vol., No., (03) 337-350 (30-98X Print) Waktu Optimal Dalam Diversifikasi Produksi Sumber Energi Terbarukan dan Tidak Terbarukan dengan Menggunakan Prinsip Minimum Pontryagin
JURNAL SAINS DAN SENI POMITS Vol., No., (03) 337-350 (30-98X Print) Waktu Optimal Dalam Diversifikasi Produksi Sumber Energi Terbarukan dan Tidak Terbarukan dengan Menggunakan Prinsip Minimum Pontryagin
PENERAPAN BEHAVIOR BASED ROBOTIC PADA SISTEM NAVIGASI DAN KONTROL ROBOT SOCCER
 PENERAPAN BEHAVIOR BASED ROBOIC PADA SISEM NAVIGASI DAN KONROL ROBO SOCCER Ravi Harish Maulana Jurusan eknik Elektro IS, Surabaya 60111, email: rv_axione@yahoo.co.id Abstrak Dalam perancangan robot soccer,
PENERAPAN BEHAVIOR BASED ROBOIC PADA SISEM NAVIGASI DAN KONROL ROBO SOCCER Ravi Harish Maulana Jurusan eknik Elektro IS, Surabaya 60111, email: rv_axione@yahoo.co.id Abstrak Dalam perancangan robot soccer,
ANALISA KESTABILAN PERSAMAAN GERAK ROKET TIGA DIMENSI TIPE RKX- 200 LAPAN DAN SIMULASINYA
 ANALISA KESTABILAN PERSAMAAN GERAK ROKET TIGA DIMENSI TIPE RKX- 200 LAPAN DAN SIMULASINYA MOHAMMAD RIFA I 1208100703 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI
ANALISA KESTABILAN PERSAMAAN GERAK ROKET TIGA DIMENSI TIPE RKX- 200 LAPAN DAN SIMULASINYA MOHAMMAD RIFA I 1208100703 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI
BAB I PENDAHULUAN Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1. Latar Belakang Masalah Kendali model prediktif termultipleksi atau Multiplexed Model Predictive Control (MMPC) merupakan pengembangan dari kendali model prediktif atau Model Predictive
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah Kendali model prediktif termultipleksi atau Multiplexed Model Predictive Control (MMPC) merupakan pengembangan dari kendali model prediktif atau Model Predictive
ANALISIS KONTROL SISTEM PENDULUM TERBALIK MENGGUNAKAN REGULATOR KUADRATIK LINEAR
 Jurnal INEKNA, ahun XII, No., Mei : 5-57 ANALISIS KONROL SISEM PENDULUM ERBALIK MENGGUNAKAN REGULAOR KUADRAIK LINEAR Nurmahaludin () () Staf Pengajar Jurusan eknik Elektro Politeknik Negeri Banjarmasin
Jurnal INEKNA, ahun XII, No., Mei : 5-57 ANALISIS KONROL SISEM PENDULUM ERBALIK MENGGUNAKAN REGULAOR KUADRAIK LINEAR Nurmahaludin () () Staf Pengajar Jurusan eknik Elektro Politeknik Negeri Banjarmasin
Desain Pengendalian Robot Beroda Dua dengan Pendulum Terbalik menggunakan Pengendali Modus Luncur
 Desain Pengendalian Robot Beroda Dua dengan Pendulum Terbalik menggunakan Pengendali Modus Luncur Adi Yuditia N.P a, Subchan, Ph.D b, Sunarsini, S.Si, M.Si c a Jurusan Matematika, Institut Teknologi Sepuluh
Desain Pengendalian Robot Beroda Dua dengan Pendulum Terbalik menggunakan Pengendali Modus Luncur Adi Yuditia N.P a, Subchan, Ph.D b, Sunarsini, S.Si, M.Si c a Jurusan Matematika, Institut Teknologi Sepuluh
ABSTRAK. Inverted Pendulum, Proporsional Integral Derivative, Simulink Matlab. Kata kunci:
 PROJECT OF AN INTELLIGENT DIFFERENTIALY DRIVEN TWO WHEELS PERSONAL VEHICLE (ID2TWV) SUBTITLE MODELING AND EXPERIMENT OF ID2TWV BASED ON AN INVERTED PENDULUM MODEL USING MATLAB SIMULINK Febry C.N*, EndraPitowarno**
PROJECT OF AN INTELLIGENT DIFFERENTIALY DRIVEN TWO WHEELS PERSONAL VEHICLE (ID2TWV) SUBTITLE MODELING AND EXPERIMENT OF ID2TWV BASED ON AN INVERTED PENDULUM MODEL USING MATLAB SIMULINK Febry C.N*, EndraPitowarno**
Modifikasi Kontrol untuk Sistem Tak Linier Input Tunggal-Output Tunggal
 Vol 7, No2, 118-123, Januari 2011 Modifikasi Kontrol untuk Sistem Tak Linier Input Tunggal-Output Tunggal Abstrak Dalam tulisan ini diuraikan sebuah kontrol umpan balik dinamik Dari kontrol yang diperoleh
Vol 7, No2, 118-123, Januari 2011 Modifikasi Kontrol untuk Sistem Tak Linier Input Tunggal-Output Tunggal Abstrak Dalam tulisan ini diuraikan sebuah kontrol umpan balik dinamik Dari kontrol yang diperoleh
KINEMATIKA. A. Teori Dasar. Besaran besaran dalam kinematika
 KINEMATIKA A. Teori Dasar Besaran besaran dalam kinematika Vektor Posisi : adalah vektor yang menyatakan posisi suatu titik dalam koordinat. Pangkalnya di titik pusat koordinat, sedangkan ujungnya pada
KINEMATIKA A. Teori Dasar Besaran besaran dalam kinematika Vektor Posisi : adalah vektor yang menyatakan posisi suatu titik dalam koordinat. Pangkalnya di titik pusat koordinat, sedangkan ujungnya pada
DESAIN LINEAR QUADRATIC REGULATOR PADA SISTEM INVERTED PENDULUM. Muhammad Wakhid Musthofa 1
 PROSIDING ISBN : 978 979 65 DESAIN LINEAR QUADRATIC REGULATOR PADA SISTEM INVERTED PENDULUM T Muhammad Wakhid Musthoa Program Studi Matematika Universitas Islam Negeri Sunan Kalijaga Yogakarta e mail:
PROSIDING ISBN : 978 979 65 DESAIN LINEAR QUADRATIC REGULATOR PADA SISTEM INVERTED PENDULUM T Muhammad Wakhid Musthoa Program Studi Matematika Universitas Islam Negeri Sunan Kalijaga Yogakarta e mail:
DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY
 DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY Reza Dwi Imami 1), Aris Triwiyatno 2), dan Sumardi 2) Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro, Jln. Prof. Sudharto,
DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY Reza Dwi Imami 1), Aris Triwiyatno 2), dan Sumardi 2) Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro, Jln. Prof. Sudharto,
OPTIMASI PARAMETER α DAN γ DALAM PEMULUSAN EKSPONENSIAL DUA PARAMETER DENGAN METODE MODIFIKASI GOLDEN SECTION
 OPTIMASI PARAMETER α DAN γ DALAM PEMULUSAN EKSPONENSIAL DUA PARAMETER DENGAN METODE MODIFIKASI GOLDEN SECTION NILA YUWIDA 1208100015 Dosen Pembimbing : Dra. Nuri Wahyuningsih, M.Kes Drs. Lukman Hanafi,
OPTIMASI PARAMETER α DAN γ DALAM PEMULUSAN EKSPONENSIAL DUA PARAMETER DENGAN METODE MODIFIKASI GOLDEN SECTION NILA YUWIDA 1208100015 Dosen Pembimbing : Dra. Nuri Wahyuningsih, M.Kes Drs. Lukman Hanafi,