ANALISA KESTABILAN PERSAMAAN GERAK ROKET TIGA DIMENSI TIPE RKX- 200 LAPAN DAN SIMULASINYA
|
|
|
- Inge Wibowo
- 6 tahun lalu
- Tontonan:
Transkripsi

1 ANALISA KESTABILAN PERSAMAAN GERAK ROKET TIGA DIMENSI TIPE RKX- 200 LAPAN DAN SIMULASINYA MOHAMMAD RIFA I JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2012
2



3 1.1 Latar Belakang Indonesia sebagai negara yang berkembang Roket kendali 6 derajat kebebasan Longitudinal dan lateraldirectional Persamaan non linear Tidak stabil
4 1.2 Rumusan Masalah Bagaimana melinearisasi persamaan non linear gerak roket? Bagaimana menentukan kestabilan sistem persamaan gerak roket tipe RKX-200 LAPAN?
5 1.3 Batasan Masalah Roket dianggap rigid body (benda tegar) Massa roket diasumsikan konstan Sudut serang (angle of attack) dianggap nol Fase yang diamati hanya pada fase sustainer (fase setelah pembakaran propelan atau bahan bakar utama habis pada ketinggian tertentu) Diasumsikan tidak terjadi coupling antara gerak longitudinal dan gerak lateral-directional Simulasi yang digunakan adalah Simulink Matlab 7.10
6 1.4 Tujuan Untuk melinearisasi persamaan nonlinear gerak roket Untuk menentukan kestabilan persamaan gerak roket tipe RKX-200
7 1.5 Manfaat Memperdalam dan mengembangkan wawasan disipilin ilmu, terutama sistem persamaan gerak roket Sebagai dasar untuk mendesain sistem kendali yang tepat

8 Geometri Roket RKX-200 LAPAN Didesain : boosting stage sustaining stage Mempunyai 3 sirip kendali yaitu : elevator, rudder, aileron
9 Karakteristik RKX-200 LAPAN massa roket (m) kg luas sirip m 2 busur aerodinamika rata-rata (c) m momen inersia roll (Ix) kg m 2 momen inersia pitch (Iy) kg m 2 momen inersia yaw (Iz) kg m 2 volume m 3 kecepatan awal jelajah (U0) 0.1 mach
10 Sistem Sumbu Roket Sistem Sumbu Roket Sumbu badan Sumbu bumi
11 Sistem Sumbu Roket No. Parameter sistem sumbu badan Sumbu-x Sumbu-y Sumbu-z 1. Kecepatan linear u v w 2. Kecepatan sudut p q r 3. Gaya aerodinamik X Y Z 4. Momen aerodinamik L M N 5. Momen kelembaman Ix Iy Iz 6. Perubahan sudut euler
12 Model Persamaan Gerak Roket Persamaan gaya Persamaan momen
13 Persamaan Kecepatan Anguler
14 Linearisasi Sistem Deret taylor
15 Karena adalah titik setimbang, maka Dengan memisalkan Maka
16 Persamaan Ruang Keadaan
17 Kestabilan Sistem Kestabilan ditentukan melalui nilai karakteristik suatu sistem pada titik setimbangnya dapat dikatakan : Stabil, jika bagian real dari nilai eigen bernilai non-positif. Stabil asimtotis, jika bagian real dari nilai eigen bernilai negatif. Tidak stabil, jika bagian real dari nilai eigen bernilai positif.
, sistem dikatakan stabil atau mempunyai bagian real negatif jika dan hanya jika suku-suku pada kolom pertama memiliki tanda yang sama (positif atau negatif")
18 Kriteria Kestabilan Routh Hurwitz Jika diketahui suatu persamaan karakteristik dengan orde ke-n sebagai berikut : Dengan menggunakan akar karakteristik (nilai eigen), sistem dikatakan stabil atau mempunyai bagian real negatif jika dan hanya jika suku-suku pada kolom pertama memiliki tanda yang sama (positif atau negatif semua)
19 Obyek Penelitian menganalisa kestabilan sistem persamaan gerak roket tiga dimensi tipe RKX-200 LAPAN serta mensimulasikan dengan matlab.
20 Langkah Pengerjaan Studi Pendahuluan Linearisasi Model Persamaan gerak roket Membentuk State Space dan Analisa Kestabilan Simulasi Matlab Kesimpulan dan Saran
21 Linerisasi
22 Teori Gangguan Kecil (Small Disturbance Theory)
23
24 4.6
25 Ketika kondisi rata-rata gangguan sangat kecil, maka dipenuhi asumsi : a. perkalian (product) antar gangguan dapat dianggap nol. b. sinus dari sudut gangguan dapat dianggap sama dengan sudut gangguan, sedangkan cosinus dari sudut gangguan dianggap sama dengan satu.
26
27 4.9
28 Persamaan merupakan persamaan gerak roket yang terdiri dari persamaan pada kondisi trim dan persamaan gangguan Karena pelinearan, maka persamaan pada kondisi setimbang diabaikan
29
30 Kasus khusus Kondisi terbang lurus (staight) menyebabkan Kondisi terbang symetric menyebabkan Kondisi terbang dengan sayap mendatar menyebabkan Kondisi terbang setimbang (trimmed) menyebabkan hal ini berakibat juga
31
32 persamaan gerak untuk perubahan kecil disekitar nilai kesetimbangannya atau disebut persamaan gangguan dari gaya dan momen. Gangguan dalam analisa gerak roket sangat berpengaruh pada gaya dan momen roket. Gangguangangguan ini secara tidak langsung ditransformasi ke dalam bentuk fungsi gangguan.
33 Fungsi gangguan
34 Deret Taylor
35 Dengan menyamakan antara persamaan gaya dan fungsi gangguan Serta jika mengikuti definisi berikut :
36
37 Pembentukan Matriks State Space Persamaan Gerak Longitudinal Dalam analisa kestabilan, ada beberapa parameter yang diabaikan seperti karena tidak berpengaruh terhadap respon gerak roket.
38 Disamping itu, Dengan menggunakan sumbu kestabilan (keseimbangan) roket, dapat dianggap nol. Sedangkan sama dengan sudut jalur terbang jika sudut serang diasumsikan nol
39 Untuk sudut lintas terbang longitudunal menjadi : = 0, maka persamaan gerak Dengan subtitusi ke maka menjadi :

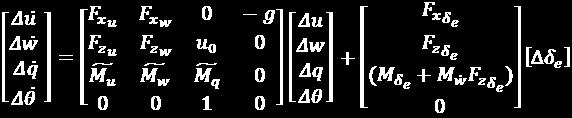
40 State space persamaan longitudinal Dengan :
41 Matriks output No Output Matriks output
42 Persamaan Lateral-directional Pada gerak lateral directional, parameter diabaikan karena tidak berpengaruh terhadap respon gerak roket.
43 Dengan memisalkan Maka persamaan menjadi : Dengan
44 Dalam analisa kestabilan sideslip angles Sering digunakan sebagai variabel state dari pada sideslip velocity. untuk sudut serang yang sangat kecil maka dipenuhi. Sehingga persamaan menjadi : dengan :

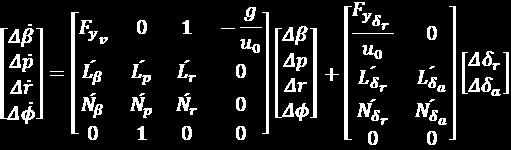
45 State space gerak lateral-directional
46 output gerak lateral-directional No output Matriks output p 3. r 4.
47 Analisa kestabilan Stabil merupakan suatu kondisi sistem yang jika mengalami gangguan dari dalam maupun luar mampu kembali ke kondisi titik kesetimbangan. Dalam hal ini, sebelum analisa kestabilan diperlukan suatu titik tetap kesetimbangan suatu sistem. Titik tetap gerak longitudinal l
48 Titik Tetap gerak Lateral-directional

49 Analisa kestabilan Routh Hurwitz Gerak Longitudinal Mencari nilai karakteristik Diperoleh Dengan
50 Tabel Routh Hurwitz gerak Longitudinal
51 Sistem Dikatakan Stabil, Bila Kolom Pertama Bernilai Positif. Sehingga menurut kriteria Routh-Hurwitz, sistem persamaan gerak longitudinal dikatakan stabil apabila :

52 Analisa Kestabilan Routh Hurwitz Gerak lateral-directional Mencari nilai akar karakteristik : Diperoleh Dengan

53 Tabel Routh-Hurwitz gerak Lateral-directional
54 Sistem Dikatakan Stabil Bila Kolom Pertama Bernilai Positif. Sehingga menurut kriteria Routh-Hurwitz sistem persamaan gerak lateral-directional dikatakan stabil apabila :
55 Uji Kestabilan Dan Simulasi Blok simulink





56 Gerak longitudinal Matriks state space pada kecepatan 0.2 mach Matriks state space pada kecepatan 0.5 mach Matriks state space pada kecepatan 1.0 mach





57 Matriks state space pada kecepatan 1.1 mach Matriks state space pada kecepatan 1.3 mach Matriks state space pada kecepatan 1.5 mach diperoleh nilai karakteristik sebagai berikut
58 laju sudut angguk Sudut Angguk Kecepatan Linear Sumbu-x Kecepatan Linear Sumbu-z Simulasi gerak longitudinal Respon Sistem mach 0.2 mach 0.5 mach Respon Sistem mach 0.2 mach 0.5 mach Waktu (detik) Waktu (detik) Respon Sistem mach 0.2 mach 0.5 mach Respon Sistem mach 0.2 mach 0.5 mach Waktu (detik) Waktu (detik)
59 laju sudut angguk sudut angguk Kecepatan Linear Sumbu-x Kecepatan Linear Sumbu-z 10 Respon Sistem 80 Respon Sistem mach 1.1 mach 1.3 mach mach 1.1 mach 1.3 mach Waktu (detik) Waktu (detik) 5 Respon Sistem 20 Respon Sistem mach 1.1 mach 1.3 mach mach 1.1 mach 1.3 mach Waktu (detik) Waktu (detik)
60 Gerak Lateral Directional Matriks state space pada kecepatan 0.2 mach Matriks state space pada kecepatan 0.5 mach Matriks state space pada kecepatan 1.0 mach
61 Matriks state space pada kecepatan 1.1 mach Matriks state space pada kecepatan 1.3 mach Matriks state space pada kecepatan 1.5 mach
62 laju sudut yaw sudut roll sideslip angle laju sudut roll Simulasi gerak lateral directional Pengaruh Defleksi Rudder 2 Respon Sistem 12 Respon Sistem mach 0.2 mach 0.5 mach mach 0.2 mach 0.5 mach Waktu (detik) Waktu (detik) Respon Sistem mach 0.2 mach 0.5 mach Waktu (detik) Respon Sistem mach 0.2 mach 0.5 mach Waktu (detik)
63 laju sudut angguk sudut angguk Kecepatan Linear Sumbu-x Kecepatan Linear Sumbu-z Pengaruh Defleksi Rudder 10 Respon Sistem 80 Respon Sistem mach 1.1 mach 1.3 mach mach 1.1 mach 1.3 mach Waktu (detik) Waktu (detik) 5 Respon Sistem 20 Respon Sistem mach 1.1 mach 1.3 mach mach 1.1 mach 1.3 mach Waktu (detik) Waktu (detik)
64 laju sudut yaw sudut roll sideslip angle laju sudut roll Simulasi gerak Lateral-directional Pengaruh Defleksi Aileron Respon Sistem mach 0.2 mach 0.5 mach Respon Sistem mach 0.2 mach 0.5 mach Waktu (detik) Waktu (detik) 0.08 Respon Sistem 0.4 Respon Sistem mach 0.2 mach 0.5 mach Waktu (detik) mach 0.2 mach 0.5 mach Waktu (detik)
65 laju sudut yaw sudut roll sideslip angle laju sudut roll Pengaruh Defleksi Aileron Respon Sistem Respon Sistem mach 1.1 mach 1.3 mach Waktu (detik) mach 0.2 mach 0.5 mach Waktu (detik) 0.08 Respon Sistem 0.4 Respon Sistem mach 0.2 mach 0.5 mach Waktu (detik) mach 0.2 mach 0.5 mach Waktu (detik)
66 Kesimpulan 1. Uji kestabilan sistem persamaan gerak roket yang dianalisa pada tiga kecepatan yaitu, mach 0.5, mach 0.2, mach1.0 diketahui bahwa sistem telah stabil. 2. Uji kestabilan sistem persamaan gerak roke pada mach 1.1, mach 1.3, mach 1.5 diketahui bahwa sistem tidak stabil, karena terdapat nilai eigen pada bagian realnya bernilai positif. 3. Pada analisa uji kestabilan yang dianalisa melalui berbagai kecepatan terbang roket, diketahui kecepatan diatas mach 1.0 sistem cenderung tidak stabil.
67 Saran 1. Pada model persamaan gerak roket perlu memasukkan efek pergeseran titik pusat massa (Central of Gravity) roket, karena pada hakikatnya titik pusat massa roket selalu berubah terhadap waktu. 2. Pada tugas akhir ini, kestabilan roket hanya pada fase sustaining saja. Peneliti selanjutnya bisa mengamati kestabilan roket pada fase boosting juga demi bisa menggambarkan secara utuh tentang kestabilan roket. 3. Dalam analisa data parameter terbang, perlu hati-hati dalam membaca output yang dikeluarkan oleh missile DATCOM. 4. Perlu menvariasikan ketinggian serta sudut serang roket agar didapatkan hasil perbandingan yang optimal. 5. Pada penelitian selanjutnya diharapkan melakukan sistem kontrol pada analisa gerak roket.
68 DAFTAR PUSTAKA [1] Blackelock, J. (1990). Automatic Control of Aircraf and Missiles, USA : Yellow springs. [2] Donald, M.D. (1990). Automatic Flight Control System, New York : Pretince Hall Internasional (UK). [3] Fitria, D. (2010). Desain dan Implementasi Pengontrol PI Optimal Pada Gerak Longitudinal Roket RKX-200 LAPAN, Bandung : Tugas Akhir S1 Departemen Teknik Fisika ITB. [4] Finizio, N. dan Landas, G. (1988). Ordinary Differential Equations with Modern Applications. California : Wadsworth Publishing Company. [5] Husnul, A.dkk. (2010). Stucture and Mechanic DIV, Bogor : LAPAN [6] Nelson, R. (1998). Flight Stability And Automatic Control, USA : MCGraw- Hill. [7] Olsder, G.J., 1994, Mathematical Systems Theory, Netherlands : Delftse Uitgevers Maatschappij b.v. [8] Siouris, G. (2003). Missile Guidance and Control Systems, New York : Spinger-Verlag. [9]Wahyuni, A dan Humas, P. (2009). Aspek-Aspek Terkait Dalam Merancang Roket Kendali RKX Pada Tahap Awal, Bogor : LAPAN.


69
Endang Mugia GS. Peneliti Bidang Teknologi Avionik, Lapan ABSTRACT
 Pengaruh Nilai Koefisien Aerodinamika... (Endang Mugia GS.) PENGARUH NILAI KOEFISIEN AERODINAMIKA DAN PADA KESTABILAN TERBANG GERAK PERIODE PENDEK (SHORT PERIOD) RKX-200 LAPAN [EFFECT OF AERODYNAMICS COEFFICIENT
Pengaruh Nilai Koefisien Aerodinamika... (Endang Mugia GS.) PENGARUH NILAI KOEFISIEN AERODINAMIKA DAN PADA KESTABILAN TERBANG GERAK PERIODE PENDEK (SHORT PERIOD) RKX-200 LAPAN [EFFECT OF AERODYNAMICS COEFFICIENT
SISTEM KENDALI ROKET RKX-200 LAPAN DENGAN PENGENDALI PID
 SISTEM KENDALI ROKET RKX-200 LAPAN DENGAN PENGENDALI PID Oleh: Putra Setya Bagus J. N. 1208100007 Pembimbing: Subchan, Ph.D Idris Eko Putro, M.Sc, AE JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
SISTEM KENDALI ROKET RKX-200 LAPAN DENGAN PENGENDALI PID Oleh: Putra Setya Bagus J. N. 1208100007 Pembimbing: Subchan, Ph.D Idris Eko Putro, M.Sc, AE JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
MATHunesa Jurnal Ilmiah Matematika Volume 3 No.6 Tahun 2017 ISSN
 MATHunesa Jurnal Ilmiah Matematika Volume 3 No.6 Tahun 2017 ISSN 2301-9115 KONTROL PROPORSIONAL-DERIVATIF PADA SISTEM DINAMIK PESAWAT TERBANG TIPE AIRBUS A380-800 Mohammad Hafiz Jurusan Matematika, FMIPA,
MATHunesa Jurnal Ilmiah Matematika Volume 3 No.6 Tahun 2017 ISSN 2301-9115 KONTROL PROPORSIONAL-DERIVATIF PADA SISTEM DINAMIK PESAWAT TERBANG TIPE AIRBUS A380-800 Mohammad Hafiz Jurusan Matematika, FMIPA,
ANALISIS KESTABILAN MODEL MANGSA-PEMANGSA DENGAN MANGSA YANG TERINFEKSI DI LINGKUNGAN TERCEMAR
 TUGAS AKHIR ANALISIS KESTABILAN MODEL MANGSA-PEMANGSA DENGAN MANGSA YANG TERINFEKSI DI LINGKUNGAN TERCEMAR ( S TA B I L I T Y A N A LY S I S O F A P R E D AT O R - P R E Y M O D E L W I T H I N F E C T
TUGAS AKHIR ANALISIS KESTABILAN MODEL MANGSA-PEMANGSA DENGAN MANGSA YANG TERINFEKSI DI LINGKUNGAN TERCEMAR ( S TA B I L I T Y A N A LY S I S O F A P R E D AT O R - P R E Y M O D E L W I T H I N F E C T
ANALISIS KESTABILAN SISTEM GERAK PESAWAT TERBANG DENGAN MENGGUNAKAN METODE NILAI EIGEN DAN ROUTH - HURWITZ (*) ABSTRAK
 ABSTRAK") ISBN : 978-979-7763-3- ANALISIS KESTABILAN SISTEM GERAK PESAWAT TERBANG DENGAN MENGGUNAKAN METODE NILAI EIGEN DAN ROUTH - HURWITZ (*) Oleh Ahmadin Departemen Matematika, Fakultas Sains dan Teknologi, Universitas
ISBN : 978-979-7763-3- ANALISIS KESTABILAN SISTEM GERAK PESAWAT TERBANG DENGAN MENGGUNAKAN METODE NILAI EIGEN DAN ROUTH - HURWITZ (*) Oleh Ahmadin Departemen Matematika, Fakultas Sains dan Teknologi, Universitas
OLEH : IKHTISHOLIYAH DOSEN PEMBIMBING : Dr. subiono,m.sc
 OLEH : IKHTISHOLIYAH 1207 100 702 DOSEN PEMBIMBING : Dr. subiono,m.sc JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2011 Pemodelan matematika
OLEH : IKHTISHOLIYAH 1207 100 702 DOSEN PEMBIMBING : Dr. subiono,m.sc JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2011 Pemodelan matematika
ANALISIS KESTABILAN MODEL MANGSA-PEMANGSA DENGAN MANGSA YANG TERINFEKSI DI LINGKUNGAN TERCEMAR
 ANALISIS KESTABILAN MODEL MANGSA-PEMANGSA DENGAN MANGSA YANG TERINFEKSI DI LINGKUNGAN TERCEMAR Oleh: Drs. M. Setijo Winarko, M.Si Drs. I Gusti Ngurah Rai Usadha, M.Si Subchan, Ph.D Drs. Kamiran, M.Si Noveria
ANALISIS KESTABILAN MODEL MANGSA-PEMANGSA DENGAN MANGSA YANG TERINFEKSI DI LINGKUNGAN TERCEMAR Oleh: Drs. M. Setijo Winarko, M.Si Drs. I Gusti Ngurah Rai Usadha, M.Si Subchan, Ph.D Drs. Kamiran, M.Si Noveria
ANALISA KARAKTERISTIK AERODINAMIKA UNTUK KEBUTUHAN GAYA DORONG TAKE OFF DAN CRUISE PADA HIGH SPEED FLYING TEST BED (HSFTB) LAPAN
 LAPAN") ANALISA KARAKTERISTIK AERODINAMIKA UNTUK KEBUTUHAN GAYA DORONG TAKE OFF DAN CRUISE PADA HIGH SPEED FLYING TEST BED (HSFTB) LAPAN Oleh : Lintang Madi Sudiro 2106 100 130 Jurusan Teknik Mesin Fakultas Teknologi
ANALISA KARAKTERISTIK AERODINAMIKA UNTUK KEBUTUHAN GAYA DORONG TAKE OFF DAN CRUISE PADA HIGH SPEED FLYING TEST BED (HSFTB) LAPAN Oleh : Lintang Madi Sudiro 2106 100 130 Jurusan Teknik Mesin Fakultas Teknologi
PERHITUNGAN KARAKTERISTIK AERODINAMIKA, ANALISIS DINAMIKA DAN KESTABILAN GERAK DUA DIMENSI MODUS LONGITUDINAL ROKET RX 250 LAPAN
 PERHITUNGAN KARAKTERISTIK AERODINAMIKA, ANALISIS DINAMIKA DAN KESTABILAN GERAK DUA DIMENSI MODUS LONGITUDINAL ROKET RX 25 LAPAN Singgih Satrio Wibowo Dosen Program Studi Teknik Aeronautika Jurusan Teknik
PERHITUNGAN KARAKTERISTIK AERODINAMIKA, ANALISIS DINAMIKA DAN KESTABILAN GERAK DUA DIMENSI MODUS LONGITUDINAL ROKET RX 25 LAPAN Singgih Satrio Wibowo Dosen Program Studi Teknik Aeronautika Jurusan Teknik
Oleh Nara Riatul Kasanah Dosen Pembimbing Drs. Sri Suprapti H., M.Si
 Oleh Nara Riatul Kasanah 1209100079 Dosen Pembimbing Drs. Sri Suprapti H., M.Si JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2014 PENDAHULUAN
Oleh Nara Riatul Kasanah 1209100079 Dosen Pembimbing Drs. Sri Suprapti H., M.Si JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2014 PENDAHULUAN
BAB II LANDASAN TEORI. selanjutnya sebagai bahan acuan yang mendukung tujuan penulisan. Materi-materi
 BAB II LANDASAN TEORI Pada bab ini akan dibahas tentang landasan teori yang digunakan pada bab selanjutnya sebagai bahan acuan yang mendukung tujuan penulisan. Materi-materi yang diuraikan berupa definisi-definisi
BAB II LANDASAN TEORI Pada bab ini akan dibahas tentang landasan teori yang digunakan pada bab selanjutnya sebagai bahan acuan yang mendukung tujuan penulisan. Materi-materi yang diuraikan berupa definisi-definisi
SIMULASI GERAK WAHANA PELUNCUR POLYOT
 BAB SIMULASI GERAK WAHANA PELUNCUR POLYOT. Pendahuluan Simulasi gerak wahana peluncur Polyot dilakukan dengan menggunakan perangkat lunak Simulink Matlab 7.. Dalam simulasi gerak ini dimodelkan gerak roket
BAB SIMULASI GERAK WAHANA PELUNCUR POLYOT. Pendahuluan Simulasi gerak wahana peluncur Polyot dilakukan dengan menggunakan perangkat lunak Simulink Matlab 7.. Dalam simulasi gerak ini dimodelkan gerak roket
ANALISIS STABILITAS MODEL MATEMATIKA DARI PENYEBARAN PENYAKIT MENULAR MELALUI TRANSPORTASI ANTAR DUA KOTA
 ANALISIS STABILITAS MODEL MATEMATIKA DARI PENYEBARAN PENYAKIT MENULAR MELALUI TRANSPORTASI ANTAR DUA KOTA ANALYSIS OF STABILITY OF SPREADING DISEASE MATHEMATICAL MODEL WITH TRANSPORT-RELATED INFECTION
ANALISIS STABILITAS MODEL MATEMATIKA DARI PENYEBARAN PENYAKIT MENULAR MELALUI TRANSPORTASI ANTAR DUA KOTA ANALYSIS OF STABILITY OF SPREADING DISEASE MATHEMATICAL MODEL WITH TRANSPORT-RELATED INFECTION
Oleh : Dinita Rahmalia NRP Dosen Pembimbing : Drs. M. Setijo Winarko, M.Si.
 PERMODELAN MATEMATIKA DAN ANALISIS STABILITAS DARI PENYEBARAN PENYAKIT FLU BURUNG (MATHEMATICAL MODEL AND STABILITY ANALYSIS THE SPREAD OF AVIAN INFLUENZA) Oleh : Dinita Rahmalia NRP 1206100011 Dosen Pembimbing
PERMODELAN MATEMATIKA DAN ANALISIS STABILITAS DARI PENYEBARAN PENYAKIT FLU BURUNG (MATHEMATICAL MODEL AND STABILITY ANALYSIS THE SPREAD OF AVIAN INFLUENZA) Oleh : Dinita Rahmalia NRP 1206100011 Dosen Pembimbing
Arisma Yuni Hardiningsih. Dra. Laksmi Prita Wardhani, M.Si. Jurusan Matematika. Surabaya
 ANALISIS KESTABILAN DAN MEAN DISTRIBUSI MODEL EPIDEMIK SIR PADA WAKTU DISKRIT Arisma Yuni Hardiningsih 1206 100 050 Dosen Pembimbing : Dra. Laksmi Prita Wardhani, M.Si Jurusan Matematika Institut Teknologi
ANALISIS KESTABILAN DAN MEAN DISTRIBUSI MODEL EPIDEMIK SIR PADA WAKTU DISKRIT Arisma Yuni Hardiningsih 1206 100 050 Dosen Pembimbing : Dra. Laksmi Prita Wardhani, M.Si Jurusan Matematika Institut Teknologi
ANALISA EFEKTIVITAS SUDUT DEFLEKSI AILERON PADA PESAWAT UDARA NIR AWAK (PUNA) ALAP-ALAP
 ALAP-ALAP") ANALISA EFEKTIVITAS SUDUT DEFLEKSI AILERON PADA PESAWAT UDARA NIR AWAK (PUNA) ALAP-ALAP Gunawan Wijiatmoko 1) 1) TRIE, BBTA3, Badan Pengkajian dan Penerapan Teknologi Kawasan PUSPIPTEK Gedung 240, Tangerang
ANALISA EFEKTIVITAS SUDUT DEFLEKSI AILERON PADA PESAWAT UDARA NIR AWAK (PUNA) ALAP-ALAP Gunawan Wijiatmoko 1) 1) TRIE, BBTA3, Badan Pengkajian dan Penerapan Teknologi Kawasan PUSPIPTEK Gedung 240, Tangerang
PENELITIAN PRESTASI TERBANG ROKET SONDA SATU TINGKAT RX-320
 PENELITIAN PRESTASI TERBANG ROKET SONDA SATU TINGKAT RX-320 Turah Semblring Penellti Pusterapan. LAPAN ABSTRACT Research to find the optimum performance of the rocket is done by using one stage of RX-320
PENELITIAN PRESTASI TERBANG ROKET SONDA SATU TINGKAT RX-320 Turah Semblring Penellti Pusterapan. LAPAN ABSTRACT Research to find the optimum performance of the rocket is done by using one stage of RX-320
SISTEM KENDALI ROKET UNTUK GERAK UNPITCHING
 SISTEM KENDALI ROKET UNTUK GERAK UNPITCHING Rika Andiarti, Edi Sofyan Peneliti Bidang Kendali, Pustekwagan, LAPAN ABSTRACT A missile control system utilizing Proportioncd-Integrcd-Derivative (PID) controller
SISTEM KENDALI ROKET UNTUK GERAK UNPITCHING Rika Andiarti, Edi Sofyan Peneliti Bidang Kendali, Pustekwagan, LAPAN ABSTRACT A missile control system utilizing Proportioncd-Integrcd-Derivative (PID) controller
ANALISIS KESTABILAN MODEL PENIPISAN SUMBER DAYA HUTAN OLEH PERKEMBANGAN INDUSTRIALISASI
 ANALISIS KESTABILAN MODEL PENIPISAN SUMBER DAYA HUTAN OLEH PERKEMBANGAN INDUSTRIALISASI Oleh: Khairina Aryaputri 1206 100 041 Pembimbing: Drs. Kamiran, M.Si Drs. M. Setijo Winarko, M.Si Jurusan Matematika
ANALISIS KESTABILAN MODEL PENIPISAN SUMBER DAYA HUTAN OLEH PERKEMBANGAN INDUSTRIALISASI Oleh: Khairina Aryaputri 1206 100 041 Pembimbing: Drs. Kamiran, M.Si Drs. M. Setijo Winarko, M.Si Jurusan Matematika
Perancangan dan Implementasi Kontroler PID Optimal Untuk Tracking Lintasan Gerakan Lateral Pada UAV(Unmanned Aerial Vehicle)
") Perancangan dan Implementasi Kontroler PID Optimal Untuk Tracking Lintasan Gerakan Lateral Pada UAV(Unmanned Aerial Vehicle) Rahmat Fauzi 2209106077 Pembimbing : Surabaya, 26 Januari 2012 Ir. Rusdhianto
Perancangan dan Implementasi Kontroler PID Optimal Untuk Tracking Lintasan Gerakan Lateral Pada UAV(Unmanned Aerial Vehicle) Rahmat Fauzi 2209106077 Pembimbing : Surabaya, 26 Januari 2012 Ir. Rusdhianto
PERHITUNGAN PARAMETER AERODINAMIKA ROKET POLYOT
 BAB 4 PERHITUNGAN PARAMETER AERODINAMIKA ROKET POLYOT 4. Perhitungan Parameter Aerodinamika Roket Polyot Menggunakan Digital Datcom dan Missile Datcom Roket Polyot dalam operasinya memiliki lintas terbang
BAB 4 PERHITUNGAN PARAMETER AERODINAMIKA ROKET POLYOT 4. Perhitungan Parameter Aerodinamika Roket Polyot Menggunakan Digital Datcom dan Missile Datcom Roket Polyot dalam operasinya memiliki lintas terbang
SIMULASI GERAK LONGITUDINAL LSU-05
 SIMULASI GERAK LONGITUDINAL LSU-05 Muhammad Fajar Pusat Teknologi Penerbangan/LAPAN muhammad.fajar@lapan.go.id Abstrak LAPAN sedang mengembangkan pesawat tanpa awak LSU-05 dengan berat total 75 kg. Pesawat
SIMULASI GERAK LONGITUDINAL LSU-05 Muhammad Fajar Pusat Teknologi Penerbangan/LAPAN muhammad.fajar@lapan.go.id Abstrak LAPAN sedang mengembangkan pesawat tanpa awak LSU-05 dengan berat total 75 kg. Pesawat
SEMINAR HASIL TUGAS AKHIR Jurusan Matematika FMIPA ITS
 SEMINAR HASIL TUGAS AKHIR Jurusan Matematika FMIPA ITS Pengendalian Populasi Hama pada Model Mangsa-Pemangsa dengan Musuh Alaminya Nabila Asyiqotur Rohmah 1209 100 703 Dosen Pembimbing: Dr Erna Apriliani,
SEMINAR HASIL TUGAS AKHIR Jurusan Matematika FMIPA ITS Pengendalian Populasi Hama pada Model Mangsa-Pemangsa dengan Musuh Alaminya Nabila Asyiqotur Rohmah 1209 100 703 Dosen Pembimbing: Dr Erna Apriliani,
PENGARUH KETIDAKLURUSAN DAN KETIDAKSIMETRISAN PEMASANGAN SIRIP PADA PRESTASI TERBANG ROKET RX-250-LPN
 PENGARUH KETIDAKLURUSAN DAN KETIDAKSIMETRISAN PEMASANGAN SIRIP PADA PRESTASI TERBANG ROKET RX-250-LPN Sulistyo Atmadi, Ahmad Riyadi Peneliti Bidang Aerodinamika dan Struktur, LAPAN ABSTRACT The performance
PENGARUH KETIDAKLURUSAN DAN KETIDAKSIMETRISAN PEMASANGAN SIRIP PADA PRESTASI TERBANG ROKET RX-250-LPN Sulistyo Atmadi, Ahmad Riyadi Peneliti Bidang Aerodinamika dan Struktur, LAPAN ABSTRACT The performance
Diterima 3 November 2015; Direvisi 30 November 2015; Disetujui 30 November 2015 ABSTRACT
 Pengaruh dari Posisi Pusat Massa Roket... (Ahmad Riyadl) PENGARUH DARI POSISI PUSAT MASSA ROKET YANG TIDAK TERLETAK PADA SUMBU AXIS SIMETRI TERHADAP DINAMIKA TERBANG ROKET BALISTIK (THE DYNAMIC OF THE
Pengaruh dari Posisi Pusat Massa Roket... (Ahmad Riyadl) PENGARUH DARI POSISI PUSAT MASSA ROKET YANG TIDAK TERLETAK PADA SUMBU AXIS SIMETRI TERHADAP DINAMIKA TERBANG ROKET BALISTIK (THE DYNAMIC OF THE
Desain dan Implementasi Automatic Flare Maneuver pada Proses Landing Pesawat Terbang Menggunakan Kontroler PID
 Desain dan Implementasi Automatic Flare Maneuver pada Proses Landing Pesawat Terbang Menggunakan Kontroler PID Mokhamad Khozin-2207100092 Bidang Studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro,
Desain dan Implementasi Automatic Flare Maneuver pada Proses Landing Pesawat Terbang Menggunakan Kontroler PID Mokhamad Khozin-2207100092 Bidang Studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro,
ANALISIS MODEL KINEMATIK PELURU KENDALI PADA PENEMBAKAN TARGET MENGGUNAKAN METODE KENDALI OPTIMAL
 ANALISIS MODEL KINEMATIK PELURU KENDALI PADA PENEMBAKAN TARGET MENGGUNAKAN METODE KENDALI OPTIMAL Pembimbing : Subchan, M.Sc. Ph.D. Drs. Kamiran, M.Si. RESTU TRI ASTUTI-1208 100 033 Jurusan Matematika
ANALISIS MODEL KINEMATIK PELURU KENDALI PADA PENEMBAKAN TARGET MENGGUNAKAN METODE KENDALI OPTIMAL Pembimbing : Subchan, M.Sc. Ph.D. Drs. Kamiran, M.Si. RESTU TRI ASTUTI-1208 100 033 Jurusan Matematika
WAKTU OPTIMUM PADA PELURU KENDALI DENGAN MANUVER AKHIR MENGHUNJAM VERTIKAL. Sari Cahyaningtias Dosen Pembimbing: Subchan, Ph.
 WAKTU OPTIMUM PADA PELURU KENDALI DENGAN MANUVER AKHIR MENGHUNJAM VERTIKAL Sari Cahyaningtias 1207 100 046 Dosen Pembimbing: Subchan, Ph.D Abstrak Peluru kendali adalah senjata berpanduan dan didesain
WAKTU OPTIMUM PADA PELURU KENDALI DENGAN MANUVER AKHIR MENGHUNJAM VERTIKAL Sari Cahyaningtias 1207 100 046 Dosen Pembimbing: Subchan, Ph.D Abstrak Peluru kendali adalah senjata berpanduan dan didesain
Analisa Kualitatif pada Model Penyakit Parasitosis
 Analisa Kualitatif pada Model Penyakit Parasitosis Nara Riatul Kasanah dan Sri Suprapti H Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Teknologi Sepuluh Nopember (ITS) Jl.
Analisa Kualitatif pada Model Penyakit Parasitosis Nara Riatul Kasanah dan Sri Suprapti H Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Teknologi Sepuluh Nopember (ITS) Jl.
Pengendalian Populasi Hama pada Model Mangsa-Pemangsa dengan Musuh Alaminya
 JURNAL SAINS DAN SENI POMITS Vol 2, No 1, (2013) 2337-3520 (2301-928X Print) 1 Pengendalian Populasi Hama pada Model Mangsa-Pemangsa dengan Musuh Alaminya Nabila Asyiqotur Rohmah, Erna Apriliani Jurusan
JURNAL SAINS DAN SENI POMITS Vol 2, No 1, (2013) 2337-3520 (2301-928X Print) 1 Pengendalian Populasi Hama pada Model Mangsa-Pemangsa dengan Musuh Alaminya Nabila Asyiqotur Rohmah, Erna Apriliani Jurusan
MODEL DINAMIK ETANOL, GLUKOSA, DAN ZYMOMONAS MOBILIS DALAM PROSES FERMENTASI
 MODEL DINAMIK ETANOL, GLUKOSA, DAN ZYMOMONAS MOBILIS DALAM PROSES FERMENTASI Primadina 1, Widowati 2, Kartono 3 1,2 Jurusan Matematika FMIPA Universitas Diponegoro Jln. Prof. H.Soedarto, S.H., Tembalang,
MODEL DINAMIK ETANOL, GLUKOSA, DAN ZYMOMONAS MOBILIS DALAM PROSES FERMENTASI Primadina 1, Widowati 2, Kartono 3 1,2 Jurusan Matematika FMIPA Universitas Diponegoro Jln. Prof. H.Soedarto, S.H., Tembalang,
ANALISIS STABILITAS SISTEM DINAMIK UNTUK MODEL MATEMATIKA EPIDEMIOLOGI TIPE-SIR (SUSCEPTIBLES, INFECTION, RECOVER)
") Jurnal Euclid, Vol.4, No.1, pp.646 ANALISIS STABILITAS SISTEM DINAMIK UNTUK MODEL MATEMATIKA EPIDEMIOLOGI TIPE-SIR (SUSCEPTIBLES, INFECTION, RECOVER) Herri Sulaiman Program Studi Pendidikan Matematika
Jurnal Euclid, Vol.4, No.1, pp.646 ANALISIS STABILITAS SISTEM DINAMIK UNTUK MODEL MATEMATIKA EPIDEMIOLOGI TIPE-SIR (SUSCEPTIBLES, INFECTION, RECOVER) Herri Sulaiman Program Studi Pendidikan Matematika
KONTROLER CAIN SCHEDULING UNTUK RUDAL UDARA KE UDARA
 KONTROLER CAIN SCHEDULING UNTUK RUDAL UDARA KE UDARA Rika Andiarti Peneliti Bidang Kendall Pustekwagan. LAPAN ABSTRACT A control system for an air-to-air guided missile is developed. Gain scheduling control
KONTROLER CAIN SCHEDULING UNTUK RUDAL UDARA KE UDARA Rika Andiarti Peneliti Bidang Kendall Pustekwagan. LAPAN ABSTRACT A control system for an air-to-air guided missile is developed. Gain scheduling control
ANALISIS KESTABILAN TITIK EQUILIBRIUM GERAK LONGITUDINAL PESAWAT TERBANG BWB AC MENGGUNAKAN METODE NILAI EIGEN DAN METODE ROUTH-
 ANALISIS KESTABILAN TITIK EQUILIBRIUM GERAK LONGITUDINAL PESAWAT TERBANG BWB AC 20.30 MENGGUNAKAN METODE NILAI EIGEN DAN METODE ROUTH- HURWITZ SERTA SIMULASINYA MENGGUNAKAN MATLAB SIMULINK Skripsi Untuk
ANALISIS KESTABILAN TITIK EQUILIBRIUM GERAK LONGITUDINAL PESAWAT TERBANG BWB AC 20.30 MENGGUNAKAN METODE NILAI EIGEN DAN METODE ROUTH- HURWITZ SERTA SIMULASINYA MENGGUNAKAN MATLAB SIMULINK Skripsi Untuk
Bagaimana Sebuah Pesawat Bisa Terbang? - Fisika
 PESAWAT TERBANG Dengan mempelajari bagaimana pesawat bisa terbang Anda akan mendapatkan kontrol yang lebih baik atas UAV Anda. Bagaimana Sebuah Pesawat Bisa Terbang? - Fisika Empat gaya aerodinamik yang
PESAWAT TERBANG Dengan mempelajari bagaimana pesawat bisa terbang Anda akan mendapatkan kontrol yang lebih baik atas UAV Anda. Bagaimana Sebuah Pesawat Bisa Terbang? - Fisika Empat gaya aerodinamik yang
TEKNIK KONTROL SLIDING MODE UNTUK AUTOPILOT ROKET
 47 TEKNIK KONTROL SLIDING MODE UNTUK AUTOPILOT ROKET Rika Andlartl Penellti Bidang Kendall, PusteKwagan. LA PAN ABSTRACT This paper deals with autopilot for rocket tracking problem by using sliding mode
47 TEKNIK KONTROL SLIDING MODE UNTUK AUTOPILOT ROKET Rika Andlartl Penellti Bidang Kendall, PusteKwagan. LA PAN ABSTRACT This paper deals with autopilot for rocket tracking problem by using sliding mode
PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni
 Oleh : Ika Evi Anggraeni") PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni 206 00 03 Dosen Pembimbing : Dr. Erna Apriliani, M.Si Hendra Cordova, ST,
PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni 206 00 03 Dosen Pembimbing : Dr. Erna Apriliani, M.Si Hendra Cordova, ST,
BAB II LANDASAN TEORI. eigen dan vektor eigen, persamaan diferensial, sistem persamaan diferensial, titik
 BAB II LANDASAN TEORI Pada bab ini, akan dijelaskan landasan teori yang akan digunakan dalam bab selanjutnya sebagai bahan acuan yang mendukung dan memperkuat tujuan penelitian. Landasan teori yang dimaksud
BAB II LANDASAN TEORI Pada bab ini, akan dijelaskan landasan teori yang akan digunakan dalam bab selanjutnya sebagai bahan acuan yang mendukung dan memperkuat tujuan penelitian. Landasan teori yang dimaksud
ANALISIS PRESTASI DAN LINTAS TERBANG WAHANA PELUNCUR POLYOT
 ANALISIS PRESTASI DAN LINTAS TERBANG WAHANA PELUNCUR POLYOT TUGAS AKHIR Diajukan untuk memenuhi sebagian syarat kelulusan Program Strata I pada Program Studi Teknik Penerbangan Institut Teknologi Bandung
ANALISIS PRESTASI DAN LINTAS TERBANG WAHANA PELUNCUR POLYOT TUGAS AKHIR Diajukan untuk memenuhi sebagian syarat kelulusan Program Strata I pada Program Studi Teknik Penerbangan Institut Teknologi Bandung
SISTEM KENDALI POSISI SUDUT ANGGUK UNTUK ROKET RKX-300 DENGAN METODE KENDALI LINEAR QUADRATIC REGULATOR (LQR) DAN POLE PLACEMENT
 DAN POLE PLACEMENT") SISTEM KENDALI POSISI SUDUT ANGGUK UNTUK ROKET RKX-300 DENGAN METODE KENDALI LINEAR QUADRATIC REGULATOR (LQR) DAN POLE PLACEMENT Fakhruddin Mangkusasmito, Wahyudi, and Budi Setiyono Jurusan Teknik Elektro,
SISTEM KENDALI POSISI SUDUT ANGGUK UNTUK ROKET RKX-300 DENGAN METODE KENDALI LINEAR QUADRATIC REGULATOR (LQR) DAN POLE PLACEMENT Fakhruddin Mangkusasmito, Wahyudi, and Budi Setiyono Jurusan Teknik Elektro,
ANALISIS KESTABILAN PADA MODEL TRANSMISI VIRUS HEPATITIS B YANG DIPENGARUHI OLEH MIGRASI
 ANALISIS KESTABILAN PADA MODEL TRANSMISI VIRUS HEPATITIS B YANG DIPENGARUHI OLEH MIGRASI STABILITY ANALYSIS OF THE HEPATITIS B VIRUS TRANSMISSION MODELS ARE AFFECTED BY MIGRATION Oleh : Firdha Dwishafarina
ANALISIS KESTABILAN PADA MODEL TRANSMISI VIRUS HEPATITIS B YANG DIPENGARUHI OLEH MIGRASI STABILITY ANALYSIS OF THE HEPATITIS B VIRUS TRANSMISSION MODELS ARE AFFECTED BY MIGRATION Oleh : Firdha Dwishafarina
SIMULASI DINAMIKA HELIKOPTER MINI PADA KONDISI TERBANG HOVER DENGAN KONTROL LQR
 SIMULASI DINAMIKA HELIKOPTER MINI PADA KONDISI TERBANG HOVER DENGAN KONTROL LQR Joga Dharma Setiawan dan Ahmad Maftukhin Jurusan Teknik Mesin UNDIP Fakultas Teknik Universitas Diponegoro Jl. Prof. Soedarto
SIMULASI DINAMIKA HELIKOPTER MINI PADA KONDISI TERBANG HOVER DENGAN KONTROL LQR Joga Dharma Setiawan dan Ahmad Maftukhin Jurusan Teknik Mesin UNDIP Fakultas Teknik Universitas Diponegoro Jl. Prof. Soedarto
RANCANG BANGUN SISTEM KONTROL ROKET KENDALI BERDASARKAN MODELING SYSTEM
 HK-154 RANCANG BANGUN SISTEM KONTROL ROKET KENDALI BERDASARKAN MODELING SYSTEM Oka Sudiana dan Singgih Satrio Wibowo Lembaga Penerbangan dan Antariksa Nasional (LAPAN) Jl. Raya LAPAN Rumpin Bogor Jawa
HK-154 RANCANG BANGUN SISTEM KONTROL ROKET KENDALI BERDASARKAN MODELING SYSTEM Oka Sudiana dan Singgih Satrio Wibowo Lembaga Penerbangan dan Antariksa Nasional (LAPAN) Jl. Raya LAPAN Rumpin Bogor Jawa
Sifat-Sifat Sistem Pendulum Terbalik dengan Lintasan Berbentuk Lingkaran
 Sifat-Sifat Sistem Pendulum Terbalik dengan Lintasan Berbentuk Lingkaran Nalsa Cintya Resti Sistem Informasi Universitas Nusantara PGRI Kediri Kediri, Indonesia E-mail: nalsacintya@ unpkediri.ac.id Abstrak
Sifat-Sifat Sistem Pendulum Terbalik dengan Lintasan Berbentuk Lingkaran Nalsa Cintya Resti Sistem Informasi Universitas Nusantara PGRI Kediri Kediri, Indonesia E-mail: nalsacintya@ unpkediri.ac.id Abstrak
ANALISIS LINTAS TERBANG ROKET MULTI-STAGE RKN200
 132 ANALISIS LINTAS TERBANG ROKET MULTI-STAGE RKN200 Rianto. A. Sasongko, Yazdi. I. Jenie, Ridanto. E. Poetro Program Studi Aeronotika dan Astronotika, Fakultas Teknik Mesin dan Dirgantara ITB e-mail:
132 ANALISIS LINTAS TERBANG ROKET MULTI-STAGE RKN200 Rianto. A. Sasongko, Yazdi. I. Jenie, Ridanto. E. Poetro Program Studi Aeronotika dan Astronotika, Fakultas Teknik Mesin dan Dirgantara ITB e-mail:
Ardi Noerpamoengkas Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
 Ardi Noerpamoengkas 2106 100 101 Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Latar Belakang Teknologi pengembangan potensi energi gelombang laut untuk memecahkan
Ardi Noerpamoengkas 2106 100 101 Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Latar Belakang Teknologi pengembangan potensi energi gelombang laut untuk memecahkan
IV. HASIL DAN PEMBAHASAN. 4.1 Asumsi yang digunakan dalam sistem mangsa-pemangsa. Dimisalkan suatu habitat dimana spesies mangsa dan pemangsa hidup
 IV. HASIL DAN PEMBAHASAN 4.1 Asumsi yang digunakan dalam sistem mangsa-pemangsa Dimisalkan suatu habitat dimana spesies mangsa dan pemangsa hidup berdampingan. Diasumsikan habitat ini dibagi menjadi dua
IV. HASIL DAN PEMBAHASAN 4.1 Asumsi yang digunakan dalam sistem mangsa-pemangsa Dimisalkan suatu habitat dimana spesies mangsa dan pemangsa hidup berdampingan. Diasumsikan habitat ini dibagi menjadi dua
Penentuan Kestabilan Sistem Hibrid melalui Trayektorinya pada Bidang. Oleh:
 Penentuan Kestabilan Sistem Hibrid melalui Trayektorinya pada Bidang Sistem hibrid mempunyai bentuk: x& Oleh: Kus Prihantoso Krisnawan Jurusan Pendidikan Matematika FMIPA Universitas Negeri Yogyakarta
Penentuan Kestabilan Sistem Hibrid melalui Trayektorinya pada Bidang Sistem hibrid mempunyai bentuk: x& Oleh: Kus Prihantoso Krisnawan Jurusan Pendidikan Matematika FMIPA Universitas Negeri Yogyakarta
Analisis Kestabilan Model Penurunan Sumber Daya Hutan Akibat Industri
 J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 15, No. 1, Maret 2018, 31-40 Analisis Kestabilan Model Penurunan Sumber Daya Hutan Akibat Industri Indira Anggriani 1, Sri Nurhayati 2, Subchan
J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 15, No. 1, Maret 2018, 31-40 Analisis Kestabilan Model Penurunan Sumber Daya Hutan Akibat Industri Indira Anggriani 1, Sri Nurhayati 2, Subchan
PERBANDINGAN SOLUSI MODEL GERAK ROKET DENGAN METODE RUNGE-KUTTA DAN ADAM- BASHFORD
 Prosiding Seminar Nasional Matematika, Universitas Jember, 19 November 2014 376 PERBANDINGAN SOLUSI MODEL GERAK ROKET DENGAN METODE RUNGE-KUTTA DAN ADAM- BASHFORD KUSBUDIONO 1, KOSALA DWIDJA PURNOMO 2,
Prosiding Seminar Nasional Matematika, Universitas Jember, 19 November 2014 376 PERBANDINGAN SOLUSI MODEL GERAK ROKET DENGAN METODE RUNGE-KUTTA DAN ADAM- BASHFORD KUSBUDIONO 1, KOSALA DWIDJA PURNOMO 2,
ANALISA DAN SIMULASI MODEL QUATERNION UNTUK KESEIMBANGAN PESAWAT TERBANG
 ANALISA DAN SIMULASI MODEL QUATERNION UNTUK KESEIMBANGAN PESAWAT TERBANG Dosen Pembimbing: Drs. Kamiran, M.Si RIZKI FAUZIAH 1209100028 JURUSAN MATEMATIKA ITS FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
ANALISA DAN SIMULASI MODEL QUATERNION UNTUK KESEIMBANGAN PESAWAT TERBANG Dosen Pembimbing: Drs. Kamiran, M.Si RIZKI FAUZIAH 1209100028 JURUSAN MATEMATIKA ITS FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
SIMULASI DAN PERHITUNGAN SPIN ROKET FOLDED FIN BERDIAMETER 200 mm
 Simulasi dan Perhitungan Spin Roket... (Ahmad Jamaludin Fitroh et al.) SIMULASI DAN PERHITUNGAN SPIN ROKET FOLDED FIN BERDIAMETER 00 mm Ahmad Jamaludin Fitroh *), Saeri **) *) Peneliti Aerodinamika, LAPAN
Simulasi dan Perhitungan Spin Roket... (Ahmad Jamaludin Fitroh et al.) SIMULASI DAN PERHITUNGAN SPIN ROKET FOLDED FIN BERDIAMETER 00 mm Ahmad Jamaludin Fitroh *), Saeri **) *) Peneliti Aerodinamika, LAPAN
Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe 1 Untuk Sistem Pendulum Kereta
 Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe Untuk Sistem Pendulum Kereta Helvin Indrawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe Untuk Sistem Pendulum Kereta Helvin Indrawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
PEMODELAN MATEMATIKA DAN ANALISIS STABILITAS DARI PENYEBARAN PENYAKIT FLU BURUNG
 PEMODELAN MATEMATIKA DAN ANALISIS STABILITAS DARI PENYEBARAN PENYAKIT FLU BURUNG Dinita Rahmalia Universitas Islam Darul Ulum Lamongan, Abstrak. Di Indonesia terdapat banyak peternak unggas sebagai matapencaharian
PEMODELAN MATEMATIKA DAN ANALISIS STABILITAS DARI PENYEBARAN PENYAKIT FLU BURUNG Dinita Rahmalia Universitas Islam Darul Ulum Lamongan, Abstrak. Di Indonesia terdapat banyak peternak unggas sebagai matapencaharian
ANALISIS KESTABILAN MODEL DINAMIKA PENYEBARAN PENYAKIT FLU BURUNG
 Buletin Ilmiah Math. Stat. Dan Terapannya (Bimaster) Volume 03, No. 3 (2014), hal 235-244 ANALISIS KESTABILAN MODEL DINAMIKA PENYEBARAN PENYAKIT FLU BURUNG Hidayu Sulisti, Evi Noviani, Nilamsari Kusumastuti
Buletin Ilmiah Math. Stat. Dan Terapannya (Bimaster) Volume 03, No. 3 (2014), hal 235-244 ANALISIS KESTABILAN MODEL DINAMIKA PENYEBARAN PENYAKIT FLU BURUNG Hidayu Sulisti, Evi Noviani, Nilamsari Kusumastuti
TUGAS AKHIR. Oleh Erdina Sri Febriyanti NRP Dosen Pembimbing Dr. Erna Apriliani, M.Si Drs. Setijo Winarko, M.Si
 TUGAS AKHIR ANALISIS STABILITAS DAN OPTIMAL KONTROL PADA NYAMUK AEDES AEGYPTI DENGAN TEKNIK STERILISASI SERANGGA DAN INSEKTISIDA Oleh Erdina Sri Febriyanti NRP. 1207100028 Dosen Pembimbing Dr. Erna Apriliani,
TUGAS AKHIR ANALISIS STABILITAS DAN OPTIMAL KONTROL PADA NYAMUK AEDES AEGYPTI DENGAN TEKNIK STERILISASI SERANGGA DAN INSEKTISIDA Oleh Erdina Sri Febriyanti NRP. 1207100028 Dosen Pembimbing Dr. Erna Apriliani,
T 23 Center Manifold Dari Sistem Persamaan Diferensial Biasa Nonlinear Yang Titik Ekuilibriumnya Mengalami Bifurkasi Contoh Kasus Untuk Bifurkasi Hopf
 T 23 Center Manifold Dari Sistem Persamaan Diferensial Biasa Nonlinear Yang Titik Ekuilibriumnya Mengalami Bifurkasi Contoh Kasus Untuk Bifurkasi Hopf Rubono Setiawan Prodi Pendidikan Matematika, F.KIP
T 23 Center Manifold Dari Sistem Persamaan Diferensial Biasa Nonlinear Yang Titik Ekuilibriumnya Mengalami Bifurkasi Contoh Kasus Untuk Bifurkasi Hopf Rubono Setiawan Prodi Pendidikan Matematika, F.KIP
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID OPTIMAL UNTUK TRACKING LINTASAN GERAKAN LATERAL PADA UAV (UNMANNED AERIAL VEHICLE)
") PERANCANGAN DAN IMPLEMENTASI KONTROLER PID OPTIMAL UNTUK TRACKING LINTASAN GERAKAN LATERAL PADA UAV (UNMANNED AERIAL VEHICLE) Rahmat Fauzi - 0906077 Jurusan Teknik Elektro-FTI, Institut Teknologi Sepuluh
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID OPTIMAL UNTUK TRACKING LINTASAN GERAKAN LATERAL PADA UAV (UNMANNED AERIAL VEHICLE) Rahmat Fauzi - 0906077 Jurusan Teknik Elektro-FTI, Institut Teknologi Sepuluh
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2014
 JURUSAN MATEMATIKA Nurlita Wulansari (1210100045) Dosen Pembimbing: Drs. M. Setijo Winarko, M.Si Drs. Lukman Hanafi, M.Sc FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH NOPEMBER
JURUSAN MATEMATIKA Nurlita Wulansari (1210100045) Dosen Pembimbing: Drs. M. Setijo Winarko, M.Si Drs. Lukman Hanafi, M.Sc FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH NOPEMBER
Jurnal Math Educator Nusantara (JMEN) Sifat-Sifat Sistem Pendulum Terbalik Dengan Lintasan Berbentuk Lingkaran
 Sifat-Sifat Sistem Pendulum Terbalik Dengan Lintasan Berbentuk Lingkaran") Jurnal Math Educator Nusantara (JMEN) Wahana publikasi karya tulis ilmiah di bidang pendidikan matematika ISSN : 2459-97345 Volume 2 Nomor 2 Halaman 93 86 November 26 26 Sifat-Sifat Sistem Pendulum Terbalik
Jurnal Math Educator Nusantara (JMEN) Wahana publikasi karya tulis ilmiah di bidang pendidikan matematika ISSN : 2459-97345 Volume 2 Nomor 2 Halaman 93 86 November 26 26 Sifat-Sifat Sistem Pendulum Terbalik
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI. Sistem Pendulum Terbalik Dalam penelitian ini diperhatikan sistem pendulum terbalik seperti pada Gambar di mana sebuah pendulum terbalik dimuat dalam motor yang bisa digerakkan.
BAB II LANDASAN TEORI. Sistem Pendulum Terbalik Dalam penelitian ini diperhatikan sistem pendulum terbalik seperti pada Gambar di mana sebuah pendulum terbalik dimuat dalam motor yang bisa digerakkan.
II. TINJAUAN PUSTAKA. Sistem dinamik adalah sistem yang berubah dari waktu ke waktu (Farlow,et al.,
 II. TINJAUAN PUSTAKA 2.1 Sistem Dinamik Sistem dinamik adalah sistem yang berubah dari waktu ke waktu (Farlow,et al., 2002). Salah satu tujuan utama dari sistem dinamik adalah mempelajari perilaku dari
II. TINJAUAN PUSTAKA 2.1 Sistem Dinamik Sistem dinamik adalah sistem yang berubah dari waktu ke waktu (Farlow,et al., 2002). Salah satu tujuan utama dari sistem dinamik adalah mempelajari perilaku dari
BAB III HASIL DAN PEMBAHASAN. ekuilibrium bebas penyakit beserta analisis kestabilannya. Selanjutnya dilakukan
 BAB III HASIL DAN PEMBAHASAN Pada bab ini akan dijelaskan mengenai model matematika penyakit campak dengan pengaruh vaksinasi, diantaranya formulasi model penyakit campak, titik ekuilibrium bebas penyakit
BAB III HASIL DAN PEMBAHASAN Pada bab ini akan dijelaskan mengenai model matematika penyakit campak dengan pengaruh vaksinasi, diantaranya formulasi model penyakit campak, titik ekuilibrium bebas penyakit
BIFURKASI PITCHFORK SUPERKRITIKAL PADA SISTEM FLUTTER
 BIFURKASI PITCHFORK SUPERKRITIKAL PADA SISTEM FLUTTER T - 2 Andini Putri Ariyani 1, Kus Prihantoso Krisnawan 2 Jurusan Pendidikan Matematika FMIPA UNY 1 e-mail:andiniputri_ariyani@yahoo.com, 2 e-mail:
BIFURKASI PITCHFORK SUPERKRITIKAL PADA SISTEM FLUTTER T - 2 Andini Putri Ariyani 1, Kus Prihantoso Krisnawan 2 Jurusan Pendidikan Matematika FMIPA UNY 1 e-mail:andiniputri_ariyani@yahoo.com, 2 e-mail:
BAB III PERANGKAT LUNAK X PLANE DAN IMPLEMENTASINYA
 BAB III PERANGKAT LUNAK X PLANE DAN IMPLEMENTASINYA Penjelasan pada bab ini akan diawali dengan deskripsi perangkat lunak X-Plane yang digunakan sebagai alat bantu pada rancang bangun sistem rekonstruksi
BAB III PERANGKAT LUNAK X PLANE DAN IMPLEMENTASINYA Penjelasan pada bab ini akan diawali dengan deskripsi perangkat lunak X-Plane yang digunakan sebagai alat bantu pada rancang bangun sistem rekonstruksi
ANALISA KESTABILAN DAN KENDALI OPTIMAL PADA MODEL PEMANENAN FITOPLANKTON-ZOOPLANKTON
 ANALISA KESTABILAN DAN KENDALI OPTIMAL PADA MODEL PEMANENAN FITOPLANKTON-ZOOPLANKTON Dosen Pembimbing: 1. Drs. Mohammad Setijo Winarko M. Si 2. Drs. Kamiran M. Si Arum Fitri Anisya 1209100054 JURUSAN MATEMATIKA
ANALISA KESTABILAN DAN KENDALI OPTIMAL PADA MODEL PEMANENAN FITOPLANKTON-ZOOPLANKTON Dosen Pembimbing: 1. Drs. Mohammad Setijo Winarko M. Si 2. Drs. Kamiran M. Si Arum Fitri Anisya 1209100054 JURUSAN MATEMATIKA
ANALISIS STABILITAS DAN OPTIMAL KONTROL PADA MODEL EPIDEMI TIPE SIR DENGAN VAKSINASI
 ANALISIS STABILITAS DAN OPTIMAL KONTROL PADA MODEL EPIDEMI TIPE SIR DENGAN VAKSINASI Oleh Ikhtisholiyah 127 1 72 Dosen Pembimbing Dr. Subiono, M.Sc ABSTRAK Pemodelan matematika dan teori banyak digunakan
ANALISIS STABILITAS DAN OPTIMAL KONTROL PADA MODEL EPIDEMI TIPE SIR DENGAN VAKSINASI Oleh Ikhtisholiyah 127 1 72 Dosen Pembimbing Dr. Subiono, M.Sc ABSTRAK Pemodelan matematika dan teori banyak digunakan
LAMPIRAN A MATRIKS LEMMA
 LAMPIRAN A MATRIKS LEMMA Dengan menganggap menjadi sebuah matriks dengan dimensi, dan adalah vektor dari dimensi, maka didapatkan persamaan: (A.1) Dengan menggunakan persamaan (2.32) dan (2.38), didapatkan
LAMPIRAN A MATRIKS LEMMA Dengan menganggap menjadi sebuah matriks dengan dimensi, dan adalah vektor dari dimensi, maka didapatkan persamaan: (A.1) Dengan menggunakan persamaan (2.32) dan (2.38), didapatkan
Created By Aristastory.Wordpress.com BAB I PENDAHULUAN. Teori sistem dinamik adalah bidang matematika terapan yang digunakan untuk
 BAB I PENDAHULUAN 1.1 Latar Belakang Teori sistem dinamik adalah bidang matematika terapan yang digunakan untuk memeriksa kelakuan sistem dinamik kompleks, biasanya dengan menggunakan persamaan diferensial
BAB I PENDAHULUAN 1.1 Latar Belakang Teori sistem dinamik adalah bidang matematika terapan yang digunakan untuk memeriksa kelakuan sistem dinamik kompleks, biasanya dengan menggunakan persamaan diferensial
Analisis Kestabilan Pada Model Transmisi Virus Hepatitis B yang Dipengaruhi Oleh Migrasi
 Analisis Kestabilan Pada Model Transmisi Virus Hepatitis B yang Dipengaruhi Oleh Migrasi 1 Firdha Dwishafarina Zainal, Setijo Winarko, dan Lukman Hanafi Jurusan Matematika, Fakultas MIPA, Institut Teknologi
Analisis Kestabilan Pada Model Transmisi Virus Hepatitis B yang Dipengaruhi Oleh Migrasi 1 Firdha Dwishafarina Zainal, Setijo Winarko, dan Lukman Hanafi Jurusan Matematika, Fakultas MIPA, Institut Teknologi
KESTABILAN DAN BIFURKASI MODEL EPIDEMIK SEIR DENGAN LAJU KESEMBUHAN TIPE JENUH. Oleh: Khoiril Hidayati ( )
") KESTABILAN DAN BIFURKASI MODEL EPIDEMIK SEIR DENGAN LAJU KESEMBUHAN TIPE JENUH Oleh: Jurusan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Teknologi Sepuluh Nopember Surabaya 2013 Latar
KESTABILAN DAN BIFURKASI MODEL EPIDEMIK SEIR DENGAN LAJU KESEMBUHAN TIPE JENUH Oleh: Jurusan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Teknologi Sepuluh Nopember Surabaya 2013 Latar
BAB II KAJIAN TEORI. dinamik, sistem linear, sistem nonlinear, titik ekuilibrium, analisis kestabilan
 BAB II KAJIAN TEORI Pada bab ini akan dibahas mengenai nilai eigen dan vektor eigen, sistem dinamik, sistem linear, sistem nonlinear, titik ekuilibrium, analisis kestabilan sistem dinamik, kriteria Routh-Hurwitz,
BAB II KAJIAN TEORI Pada bab ini akan dibahas mengenai nilai eigen dan vektor eigen, sistem dinamik, sistem linear, sistem nonlinear, titik ekuilibrium, analisis kestabilan sistem dinamik, kriteria Routh-Hurwitz,
PENELITIAN DAN PENGUJIAN KARAKTERISTIK AERODINAMIKA BOM LATIH PERCOBAAN BLP-500 DAN BLP 25
 PENELITIAN DAN PENGUJIAN KARAKTERISTIK AERODINAMIKA BOM LATIH PERCOBAAN BLP-500 DAN BLP 25 Agus Aribowo, Sulistyo Atmadi *( Yus Kadarusman Marias ") ) Peneliti Pusat Teknologi Dirgantara Tcrapan, LAPAN
PENELITIAN DAN PENGUJIAN KARAKTERISTIK AERODINAMIKA BOM LATIH PERCOBAAN BLP-500 DAN BLP 25 Agus Aribowo, Sulistyo Atmadi *( Yus Kadarusman Marias ") ) Peneliti Pusat Teknologi Dirgantara Tcrapan, LAPAN
PENYELESAIAN NUMERIK DAN ANALISA KESTABILAN PADA MODEL EPIDEMIK SEIR DENGAN PENULARAN PADA PERIODE LATEN
 PENYELESAIAN NUMERIK DAN ANALISA KESTABILAN PADA MODEL EPIDEMIK SEIR DENGAN PENULARAN PADA PERIODE LATEN Oleh: Labibah Rochmatika (12 09 100 088) Dosen Pembimbing: Drs. M. Setijo Winarko M.Si Drs. Lukman
PENYELESAIAN NUMERIK DAN ANALISA KESTABILAN PADA MODEL EPIDEMIK SEIR DENGAN PENULARAN PADA PERIODE LATEN Oleh: Labibah Rochmatika (12 09 100 088) Dosen Pembimbing: Drs. M. Setijo Winarko M.Si Drs. Lukman
GAYA ANGKAT PESAWAT Untuk mahasiswa PTM Otomotif IKIP Veteran Semarang
 GAYA ANGKAT PESAWAT Untuk mahasiswa PTM Otomotif IKIP Veteran Semarang 1. Pendahuluan Pesawat terbang modern sudah menggunakan mesin jet, namun prinsip terbangnya masih menggunakan ilmu gaya udara seperti
GAYA ANGKAT PESAWAT Untuk mahasiswa PTM Otomotif IKIP Veteran Semarang 1. Pendahuluan Pesawat terbang modern sudah menggunakan mesin jet, namun prinsip terbangnya masih menggunakan ilmu gaya udara seperti
PELACAKAN KELUARAN PADA SISTEM KONTROL TAK LINEAR YANG DIPERLUAS BERFASE NON-MINIMUM. Firman
 PELACAKAN KELUARAN PADA SISTEM KONTROL TAK LINEAR YANG DIPERLUAS BERFASE NON-MINIMUM Firman firman_unhas@yahoo.co.id DepartemenMatematika, FakultasMatematikadanIlmuPengetahuanAlam, UniversitasHasanuddin,
PELACAKAN KELUARAN PADA SISTEM KONTROL TAK LINEAR YANG DIPERLUAS BERFASE NON-MINIMUM Firman firman_unhas@yahoo.co.id DepartemenMatematika, FakultasMatematikadanIlmuPengetahuanAlam, UniversitasHasanuddin,
PERANCANGAN KONTROL NON-LINIER UNTUK KESTABILAN HOVER PADA UAV TRICOPTER DENGAN SLIDING MODE CONTROL
 Presentasi Tesis PERANCANGAN KONTROL NON-LNER UNTUK KESTABLAN HOVER PADA UAV TRCOPTER DENGAN SLDNG MODE CONTROL RUDY KURNAWAN 2211202009 Dosen Pembimbing: DR. r. Mochammad Rameli r. Rusdhianto Effendie
Presentasi Tesis PERANCANGAN KONTROL NON-LNER UNTUK KESTABLAN HOVER PADA UAV TRCOPTER DENGAN SLDNG MODE CONTROL RUDY KURNAWAN 2211202009 Dosen Pembimbing: DR. r. Mochammad Rameli r. Rusdhianto Effendie
MODEL NON LINEAR PENYAKIT DIABETES. Aminah Ekawati 1 dan Lina Aryati 2 ABSTRAK ABSTRACT
 MODEL NON LINEAR PENYAKIT DIABETES Aminah Ekawati 1 dan Lina Aryati 2 1 Kopertis Wilayah XI 2 Program Studi Matematika FMIPA UGM ABSTRAK Model matematika penyakit diabetes yang dibentuk berupa persamaan
MODEL NON LINEAR PENYAKIT DIABETES Aminah Ekawati 1 dan Lina Aryati 2 1 Kopertis Wilayah XI 2 Program Studi Matematika FMIPA UGM ABSTRAK Model matematika penyakit diabetes yang dibentuk berupa persamaan
Kestabilan Titik Ekuilibrium Model SIS dengan Pertumbuhan Logistik dan Migrasi
 Kestabilan Titik Ekuilibrium Model SIS dengan Pertumbuhan Logistik Migrasi Mohammad soleh 1, Parubahan Siregar 2 1,2 Jurusan Matematika Fakultas Sains Teknologi Universitas Islam Negeri Sultan Syarif Kasim
Kestabilan Titik Ekuilibrium Model SIS dengan Pertumbuhan Logistik Migrasi Mohammad soleh 1, Parubahan Siregar 2 1,2 Jurusan Matematika Fakultas Sains Teknologi Universitas Islam Negeri Sultan Syarif Kasim
BAB IV ANALISIS PRESTASI TERBANG FASA TAKE-OFF DAN CLIMB
 BAB IV ANALISIS PRESTASI TERBANG FASA TAKE-OFF DAN CLIMB 4.1 Perbandingan antara hasil FDR dengan X-Plane Hasil simulasi yang dikeluarkan oleh program X-Plane tidak sama walaupun inputan yang diberikan
BAB IV ANALISIS PRESTASI TERBANG FASA TAKE-OFF DAN CLIMB 4.1 Perbandingan antara hasil FDR dengan X-Plane Hasil simulasi yang dikeluarkan oleh program X-Plane tidak sama walaupun inputan yang diberikan
Tugas Akhir Bidang Studi Desain SAMSU HIDAYAT Dosen Pembimbing Dr. Ir. AGUS SIGIT PRAMONO, DEA.
 Tugas Akhir Bidang Studi Desain SAMSU HIDAYAT 2106 100 020 Dosen Pembimbing Dr. Ir. AGUS SIGIT PRAMONO, DEA. Latar Belakang Roket Pengorbit Satelit (RPS) membutuhkan roket yang dapat diluncurkan berulang
Tugas Akhir Bidang Studi Desain SAMSU HIDAYAT 2106 100 020 Dosen Pembimbing Dr. Ir. AGUS SIGIT PRAMONO, DEA. Latar Belakang Roket Pengorbit Satelit (RPS) membutuhkan roket yang dapat diluncurkan berulang
R = matriks pembobot pada fungsi kriteria. dalam perancangan kontrol LQR
 DAFTAR NOTASI η = vektor orientasi arah x = posisi surge (m) y = posisi sway (m) z = posisi heave (m) φ = sudut roll (rad) θ = sudut pitch (rad) ψ = sudut yaw (rad) ψ = sudut yaw frekuensi rendah (rad)
DAFTAR NOTASI η = vektor orientasi arah x = posisi surge (m) y = posisi sway (m) z = posisi heave (m) φ = sudut roll (rad) θ = sudut pitch (rad) ψ = sudut yaw (rad) ψ = sudut yaw frekuensi rendah (rad)
BAB 3 DINAMIKA STRUKTUR
 BAB 3 DINAMIKA STRUKTUR Gerakan dari struktur terapung akan dipengaruhi oleh keadaan sekitarnya, dimana terdapat gaya gaya luar yang bekerja pada struktur dan akan menimbulkan gerakan pada struktur. Untuk
BAB 3 DINAMIKA STRUKTUR Gerakan dari struktur terapung akan dipengaruhi oleh keadaan sekitarnya, dimana terdapat gaya gaya luar yang bekerja pada struktur dan akan menimbulkan gerakan pada struktur. Untuk
Optimasi Penggunaan Koagulan Dalam Proses Penjernihan Air
 JURNAL SAINS DAN SENI POMITS Vol. 2, No.1, (2013) 2337-3520 (2301-928X Print) A-6 Optimasi Penggunaan Koagulan Dalam Proses Penjernihan Air Tri Juliana Permatasari, Erna Apriliani Jurusan Matematika, Fakultas
JURNAL SAINS DAN SENI POMITS Vol. 2, No.1, (2013) 2337-3520 (2301-928X Print) A-6 Optimasi Penggunaan Koagulan Dalam Proses Penjernihan Air Tri Juliana Permatasari, Erna Apriliani Jurusan Matematika, Fakultas
PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK
 PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK Oleh : AHMAD ADHIM 2107100703 Dosen Pembimbing : Hendro Nurhadi, Dipl.-Ing., Ph.D. PENDAHULUAN LATAR BELAKANG Kebanyakan
PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK Oleh : AHMAD ADHIM 2107100703 Dosen Pembimbing : Hendro Nurhadi, Dipl.-Ing., Ph.D. PENDAHULUAN LATAR BELAKANG Kebanyakan
ANALISIS KESTABILAN DAN PROSES MARKOV MODEL PENYEBARAN PENYAKIT EBOLA
 Buletin Ilmiah Mat. Stat. dan Terapannya (Bimaster) Volume 04, No. 3 (2015), hal 163-172 ANALISIS KESTABILAN DAN PROSES MARKOV MODEL PENYEBARAN PENYAKIT EBOLA Auliah Arfani, Nilamsari Kusumastuti, Shantika
Buletin Ilmiah Mat. Stat. dan Terapannya (Bimaster) Volume 04, No. 3 (2015), hal 163-172 ANALISIS KESTABILAN DAN PROSES MARKOV MODEL PENYEBARAN PENYAKIT EBOLA Auliah Arfani, Nilamsari Kusumastuti, Shantika
Komparasi Sistem Kontrol Satelit (ADCS) dengan Metode Kontrol PID dan Sliding-PID NUR IMROATUL UST ( )
 dengan Metode Kontrol PID dan Sliding-PID NUR IMROATUL UST ( )") Komparasi Sistem Kontrol Satelit (ADCS) dengan Metode Kontrol PID dan Sliding-PID NUR IMROATUL UST (218 1 165) Latar Belakang Indonesia memiliki bentangan wilayah yang luas. Satelit tersusun atas beberapa
Komparasi Sistem Kontrol Satelit (ADCS) dengan Metode Kontrol PID dan Sliding-PID NUR IMROATUL UST (218 1 165) Latar Belakang Indonesia memiliki bentangan wilayah yang luas. Satelit tersusun atas beberapa
Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR
 Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR 2105100166 PENDAHULUAN LATAR BELAKANG Control system : keluaran (output) dari sistem sesuai dengan referensi yang diinginkan Non linear
Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR 2105100166 PENDAHULUAN LATAR BELAKANG Control system : keluaran (output) dari sistem sesuai dengan referensi yang diinginkan Non linear
PERANCANGAN SISTEM KENDALI MODEL FOLLOWING DINAMIKA GERAK LONGITUDINAL PADA IN-FLIGHT SIMULATOR N250-PA1 DENGAN METODE KENDALI OPTIMAL KUADRAT LINIER
 PERANCANGAN SISTEM KENDALI MODEL FOLLOWING DINAMIKA GERAK LONGITUDINAL PADA IN-FLIGHT SIMULATOR N250-PA1 DENGAN METODE KENDALI OPTIMAL KUADRAT LINIER Skripsi Untuk memenuhi sebagian persyaratan mencapai
PERANCANGAN SISTEM KENDALI MODEL FOLLOWING DINAMIKA GERAK LONGITUDINAL PADA IN-FLIGHT SIMULATOR N250-PA1 DENGAN METODE KENDALI OPTIMAL KUADRAT LINIER Skripsi Untuk memenuhi sebagian persyaratan mencapai
ABSTRACT
 Identifikasi Parameter dan Perancangan... (Eko Budi Purwanto et al.) IDENTIFIKASI PARAMETER DAN PERANCANGAN SISTEM KENDALI PID UNTUK ANALISIS SIKAP TERBANG UAV [PARAMETER IDENTIFICATION AND DESIGN PID
Identifikasi Parameter dan Perancangan... (Eko Budi Purwanto et al.) IDENTIFIKASI PARAMETER DAN PERANCANGAN SISTEM KENDALI PID UNTUK ANALISIS SIKAP TERBANG UAV [PARAMETER IDENTIFICATION AND DESIGN PID
BAB II PERSAMAAN DIFERENSIAL BIASA
 BAB II PERSAMAAN DIFERENSIAL BIASA Tujuan Pembelajaran Umum: 1 Mahasiswa mampu memahami konsep dasar persamaan diferensial 2 Mahasiswa mampu menggunakan konsep dasar persamaan diferensial untuk menyelesaikan
BAB II PERSAMAAN DIFERENSIAL BIASA Tujuan Pembelajaran Umum: 1 Mahasiswa mampu memahami konsep dasar persamaan diferensial 2 Mahasiswa mampu menggunakan konsep dasar persamaan diferensial untuk menyelesaikan
BAB I PENDAHULUAN 1.1. LATAR BELAKANG
 1 BAB I PENDAHULUAN 1.1. LATAR BELAKANG Penyediaan energi dimasa depan merupakan permasalahan yang senantiasa menjadi perhatian semua bangsa, karena bagaimanapun juga kesejahteraan manusia dalam kehidupan
1 BAB I PENDAHULUAN 1.1. LATAR BELAKANG Penyediaan energi dimasa depan merupakan permasalahan yang senantiasa menjadi perhatian semua bangsa, karena bagaimanapun juga kesejahteraan manusia dalam kehidupan
BAB II LANDASAN TEORI. pada bab pembahasan. Materi-materi yang akan dibahas yaitu pemodelan
 BAB II LANDASAN TEORI Pada bab ini akan dijelaskan mengenai landasan teori yang akan digunakan pada bab pembahasan. Materi-materi yang akan dibahas yaitu pemodelan matematika, teorema Taylor, nilai eigen,
BAB II LANDASAN TEORI Pada bab ini akan dijelaskan mengenai landasan teori yang akan digunakan pada bab pembahasan. Materi-materi yang akan dibahas yaitu pemodelan matematika, teorema Taylor, nilai eigen,
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: ( Print) B-58
 ISSN: ( Print) B-58") JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-58 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman,
JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-58 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman,
PENENTUAN GAYA HAMBAT UDARA PADA PELUNCURAN ROKET DENGAN SUDUT ELEVASI 65º
 Penentuan Gaya Hambat Udara pada Peluncuran... (Turah Sembiring) PENENTUAN GAYA HAMBAT UDARA PADA PELUNCURAN ROKET DENGAN SUDUT ELEVASI 65º Turah Sembiring Peneliti Pusat Teknologi Penerbangan, LAPAN e-mail:
Penentuan Gaya Hambat Udara pada Peluncuran... (Turah Sembiring) PENENTUAN GAYA HAMBAT UDARA PADA PELUNCURAN ROKET DENGAN SUDUT ELEVASI 65º Turah Sembiring Peneliti Pusat Teknologi Penerbangan, LAPAN e-mail:
MATHunesa Jurnal Ilmiah Matematika Volume 3 No.6 Tahun 2017 ISSN
 MATHunesa Jurnal Ilmiah Matematika Volume 3 No. Tahun 7 ISSN 3-95 ANALISIS KESTABILAN GERAK DIAGONAL PADA QUADROTOR MENGGUNAKAN KONTROL PID Salmaa Jurusan Matematika, FMIPA, Universitas Negeri Surabaya
MATHunesa Jurnal Ilmiah Matematika Volume 3 No. Tahun 7 ISSN 3-95 ANALISIS KESTABILAN GERAK DIAGONAL PADA QUADROTOR MENGGUNAKAN KONTROL PID Salmaa Jurusan Matematika, FMIPA, Universitas Negeri Surabaya
ANALISIS STABILITAS PENYEBARAN VIRUS EBOLA PADA MANUSIA
 ANALISIS STABILITAS PENYEBARAN VIRUS EBOLA PADA MANUSIA Mutholafatul Alim 1), Ari Kusumastuti 2) 1) Mahasiswa Jurusan Matematika, Universitas Islam Negeri Maulana Malik Ibrahim Malang 1) mutholafatul@rocketmail.com
ANALISIS STABILITAS PENYEBARAN VIRUS EBOLA PADA MANUSIA Mutholafatul Alim 1), Ari Kusumastuti 2) 1) Mahasiswa Jurusan Matematika, Universitas Islam Negeri Maulana Malik Ibrahim Malang 1) mutholafatul@rocketmail.com
BAB I PENDAHULUAN. 1.1 Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Dalam mendisain sebuah sistem kontrol untuk sebuah plant yang parameterparameternya tidak berubah, metode pendekatan standar dengan sebuah pengontrol yang parameter-parameternya
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Dalam mendisain sebuah sistem kontrol untuk sebuah plant yang parameterparameternya tidak berubah, metode pendekatan standar dengan sebuah pengontrol yang parameter-parameternya
BAB II LANDASAN TEORI. dalam penulisan skripsi ini. Teori-teori yang digunakan berupa definisi-definisi serta
 BAB II LANDASAN TEORI Pada bab ini akan diuraikan beberapa teori-teori yang digunakan sebagai acuan dalam penulisan skripsi ini. Teori-teori yang digunakan berupa definisi-definisi serta teorema-teorema
BAB II LANDASAN TEORI Pada bab ini akan diuraikan beberapa teori-teori yang digunakan sebagai acuan dalam penulisan skripsi ini. Teori-teori yang digunakan berupa definisi-definisi serta teorema-teorema
Analisis Model Penyebaran Penyakit Menular Dengan Bakteri dan Hospes
 JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) 1-6 1 Analisis Model Penyebaran Penyakit Menular Dengan Bakteri Hospes Desy Khoirun Nisa, Drs. Kamiran, M.Si Jurusan Matematika, Fakultas MIPA, Institut Teknologi
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) 1-6 1 Analisis Model Penyebaran Penyakit Menular Dengan Bakteri Hospes Desy Khoirun Nisa, Drs. Kamiran, M.Si Jurusan Matematika, Fakultas MIPA, Institut Teknologi