LOGO. Menyusun E - Materi. Workshop Pengembangan Multimedia Pembelajaran
|
|
|
- Fanny Yuwono
- 7 tahun lalu
- Tontonan:
Transkripsi

1 LOGO Menyusun E - Materi Workshop Pengembangan Multimedia Pembelajaran

2 Rancangan Pembelajaran
3 Bagaimana Menyusun E- Materi
4 Tahapan Analisis Perancangan Pengembangan Penyampaian Evaluasi Pemeliharaan Pembelajaran Mandiri Pembelajaran Jarak-jauh Pembelajaran Blended Pembelajaran Berbasis Guru Reuse Struktur Kompetensi OP structural, procedural, clustering, 1. Mendefinisikan OP pada setiap level. 2. Mendefinisikan prasyarat dan kompetensi tiap OP. 3. Mendefinisikan relasi tiap OP. 4. Merancang metadata OP. 5. Merancang strategi pembelajaran OP. 6. Merancang media pembelajaran OP. 7. Menyelaraskan kompetensi, latihan, dan asesmen Mengembangkan e-materi: Prinsip re use dan re purpose OI dan asset digital Delivery netral Mengemas sesuai standard
5 1. Tahap Analisis
6 Peta Kompetensi
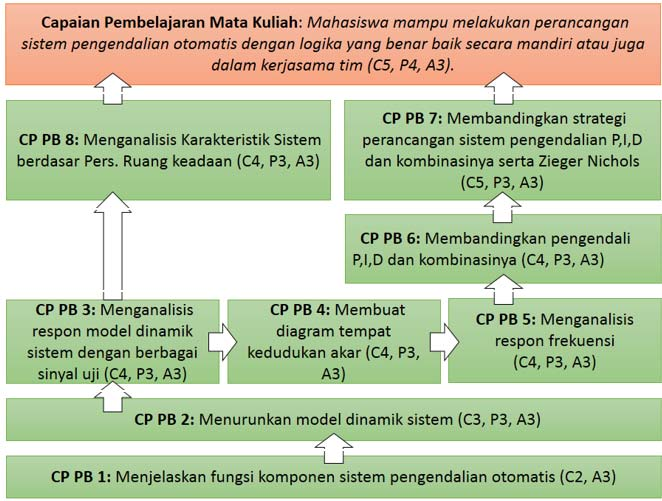
7 Peta Kompetensi Tujuan Pembelajara : Mahasiswa mampu melakukan perancangan dan menganalisis sistem pengendalian automatis dengan logika yang benar baik secara mandiri atau juga dalam kerjasama tim. Optimasi sistem pengendalian (21) Perancangan Dengan Respon Frekwensi (16) Analisis dengan Respon Frekwensi (17) Analisis Persamaan Ruang Keadaan (20) Perancangan dengan Persamaan Ruang Keadaan (19) Kestabilan Diagram Root-Locus (12) Kestabilan Diagram Bode (13) Kestabilan Diagram Nyquis(14) Kestabilan Diagram Polar (15) Diagram Routh-Hurwitz (11) Diagram Bode (10) Persamaan Ruang Keadaan Sistem (18) Fungsi Alih sistem dg.domain-s (9) Model dan Respon Dinamik Sistem (6) Model Error Sistem (8) Model Aksi Pengendali PID (Proposional, Differensial, Integral) (7) Model Sistem Fluida (2) Model Sistem Thermal (3) Model Sistem Mekanik (4) Model Sistem Elektrik (5) Sejarah SPO (0) Blok Diagram Sistem Pengendalian (1) Garis Entry Behavior Matematika Teknik : Transformasi Laplace Dinamika Sistem : Model Elemen Sistem dengan Pers. Defferensial
 P4:Melakukan Perancangan Dengan Respon Frekwensi (16) A3,C4 : Menganalisis Dengan Respon Frekwensi (17) A3,C4 : Menganalisis Dengan")
8 Peta Kompetensi Tujuan Pembelajara : Mahasiswa mampu melakukan perancangan dan menganalisis sistem pengendalian automatis dengan logika yang benar baik secara mandiri atau juga dalam kerjasama tim. A3,C4,P4 : Melakukan Perancangan Optimasi sistem pengendalian (21) P4:Melakukan Perancangan Dengan Respon Frekwensi (16) A3,C4 : Menganalisis Dengan Respon Frekwensi (17) A3,C4 : Menganalisis Dengan Persamaan Ruang Keadaan (20) P4 : Melakukan Perancangan dengan Persamaan Ruang Keadaan (19) P3,C3:Menggunakan Kestabilan Diagram Root-Locus (12) P3,C3:Menggunakan Kestabilan Diagram Bode (13) P3,C3:Menggunakan Kestabilan Diagram Nyquis(14) P3,C3:Menggunakan Kestabilan Diagram Polar (15) P3,C3: Membuat Diagram Routh-Hurwitz (11) P3,C3: Membuat Diagram Bode (10) P2,C3 : Merumuskan Persamaan Ruang Keadaan Sistem (18) P2,C3:Merumuskan Fungsi Alih sistem dg.domain-s (9) P2,C3 : Mengembangkan Model dan Respon Dinamik Sistem (6) P2,C3 : Merumuskan Model Error Sistem (8) A3,P2,C3:Mengembangkan Model Aksi Pengendali PID (Proposional, Differensial, Integral) (7) A2,C2 : Menjelaskan Model Sistem Fluida (2) A2,C2 : Menjelaskan Model Sistem Thermal (3) A2,C2 : Menjelaskan Model Sistem Mekanik (4) A2,C2 : Menjelaskan Model Sistem Elektrik (5) Sejarah SPO (0) C2 : Penyederhanaan Blok Diagram Sistem Pengendalian (1) Garis Entry Behavior Matematika Teknik : Transformasi Laplace Dinamika Sistem : Model Elemen Sistem dengan Pers. Defferensial
9 2. Tahap Perancangan
10 PENGANTAR SISTEM PENGENDALIAN OTOMATIS MODEL MATEMATIKA SISTEM DINAMIS RESPON SISTEM DINAMIS DIAGRAM TEMPAT KEDUDUKAN AKAR ANALISA RESPON FREKUENSI PENGENDALI PID 8 Bab / Pokok Bahasan / Topik 7 8 PERANCANGAN PENGENDALI PID KARAKTERISTIK SISTEM BERDASAR PERSAMAAN KEADAAN
11 Pokok Bahasan Sub Pokok Bahasan Sub sub Pokok Bahasan 1 PENGANTAR SISTEM PENGENDALIAN OTOMATIS Sejarah perkembangan teknik pengendalian otomatis Pengertian dasar sistem pengendalian otomatis Istilah Istilah Sistem Pengendalian Sistem Pengendalian Loop Terbuka Sistem Pengendalian Loop Tertutup 1.3 Komponen dalam sistem pengendalian otomatis Error Detektor Pengendali Aktuator Sensor / Transducer
12 Perancanng an Pengendali PID Pengantar Perancangan Pengendali P Perancangan Pengendali P Modifikasi Perancangan Pengendali PI Perancangan Pengendali PD Perancangan Pengendali PID OI Konsep OI Proses OI Konsep OI Prosedur Ringkasan OI Proses OI Konsep OI Prosedur Ringkasan OI Proses OI Konsep OI Prosedur Ringkasan OI Proses OI Konsep OI Prosedur Ringkasan OI Proses OI Konsep OI Prosedur Teks Persamaan Blok Diagram Definisi Tabel Prosedur Contoh soal Latihan Soal Text Blok Diagram Definisi Tabel Prosedur Contoh soal Latihan Soal Text Blok Diagram Definisi Tabel Prosedur Contoh soal Latihan Soal Text Blok Diagram Definisi Contoh - Video Tabel Prosedur Contoh soal Latihan Soal Text Blok Diagram Definisi Contoh - Video Tabel Prosedur Contoh Video pemrograman Simulink
13 No Pokok Bahasan 1 PENGANTA R SISTEM PENGENDA LIAN OTOMATIS OBJEK PEMBELAJARAN Sub-Pokok Bahasan Sejarah perkembangan teknik pengendalian otomatis Pengertian dasar sistem pengendalian otomatis Sub-Sub Pokok Bahasan Istilah Istilah Sistem Pengendalian Sistem Pengendalian Loop Terbuka Sistem Pengendalian Loop Tertutup OBJEK INFORMASI - Fakta - Konsep - Konsep -Proses - Konsep -Prinsip -Proses - Konsep -Prinsip -Proses ASET DIGITAL - Teks/Handout SSejarah perkembangan teknik pengendalian otomatis - Gambar prinsip dalam perancangan sistem pengendalian - Gambar Governor untuk sistem pengendali kecepatan buatan J. Watt - Gambar Diagram sistem pengendalian modern - Gambar Diagram sebuah sistem pengendalian - Tabel Sejarah teknik pengendalian - Perkembangan Industri Instrumen dan Pengendalian - Teks/Handout : Istilah Istilah Sistem Pengendalian - Ppt : Istilah Istilah Sistem Pengendalian - Video pembelajaran : Istilah Istilah Sistem Pengendalian - Gambar Continuous Stirred Tank Reactor - Gambar Diagram blok klasifikasi variabel : masukan, keluaran, parameter - Gambar Diagram blok klasifikasi variabel : : masukan, keluaran, parameter pada CSTR - Gambar Diagram blok klasifikasi variabel : variabel yang dimanipulasi, variabel yang dikontrol, variabel exogenous - Gambar Diagram blok klasifikasi variabel : variabel yang dimanipulasi, variabel yang dikontrol, variabel exogenous pada CSTR - Gambar Diagram blok sistem Pengendalian temperatur oven listrik - Gambar Diagram blok sistem Pengendalian nyala api pada kompor gas - Teks/Handout : Sistem Pengendalian Loop Terbuka - Ppt : Sistem Pengendalian Loop Terbuka - Video pembelajaran : Sistem Pengendalian Loop Terbuka - Gambar Diagram blok sistem Pengendalian loop terbuka - Gambar Diagram blok sistem Pengendalian nyala api pada kompor gas - Gambar Diagram blok sistem Pengendalian (loop terbuka) temperatur cairan - Teks/Handout : Sistem PengendalianLoop Tertutup - Ppt : Sistem Pengendalian Loop Tertutup - Video pembelajaran : Sistem Pengendaliann Loop Tertutup - Gambar Diagram blok sistem Pengendalian loop Tertutup - Gambar Diagram blok sistem Pengendalian (loop tertutup) temperatur cairan pada CSTR - Gambar Sistem Pengendalian kecepatan governor - Gambar Diagram blok sistem Pengendaliantemperatur oven listrik
14 Perancangan Pengendali Proporsional - P Perancangan Pengendali PI - Konsep - Proses - Prosedur - Konsep - Proses - Prosedur - Teks/Handout : Perancangan Pengendali Proporsional - Ppt : Perancangan Pengendali Proporsional - Video pembelajaran : Perancangan Pengendali Proporsional - Gambar Diagram blok sistem orde pertama - Gambar Diagram blok pengendali proporsional - Gambar Diagram blok sistem orde pertama dengan pengendali proporsional - Gambar Diagram blok pengendali proporsional modifikasi - Teks/Handout : Perancangan Pengendali Proporsional ditambah Integral - Ppt : Perancangan Pengendali Proporsional ditambah Integral - Video pembelajaran : Perancangan Pengendali Proporsional ditambah Integral - Gambar Diagram blok sistem orde pertama - Gambar Diagram blok pengendali PI - Gambar Diagram blok sistem orde pertama dengan pengendali PI
15 3. Tahap Pengembangan
16 4. Tahap Penyampaian

17 Penyampaian Pembelajaran Mandiri Pembelajaran Jarak-jauh Pembelajaran Blended Pembelajaran Berbasis Guru
18 5. Tahap Evaluasi
19 Evaluasi Pada pendekatan OP, umpanbalik dapat berasal dari sesama guru/dosen yang me-reuse/merepurpose OP. Mengevaluasi pelaksanaan dan hasil dari setiap tahapan. Mengevaluasi OP. Mengevaluasi metadata. Menentukan dampak dari pengalaman belajar kepada pembelajar. Menganalisis kepuasan pembelajar, hasil belajar, kelulusan, dan sebagainya.
20 6. Tahap Pemeliharaan
21 Memelihara Menjaga e-materi selalu relevan. Menjaga e-materi selalu up-to-date. Mengupdate metadata e-materi. Memanfaatkan hasil evaluasi untuk perbaikan dan pemeliharaan e-materi.
22 TerimaKasih
23 pditt.belajar.kemdikbud.go.id
24 LOGO Add your company slogan
PETA KOMPETENSI PEMBELAJARAN
 PETA KOMPETENSI PEMBELAJARAN Pusat pengembangan pendidikan Dan aktivitas istruksional INSTITUT TEKNOLOGI SEPULUH NOPEMBER ( P3AI ITS ) Syamsul Arifin syamp3ai@its.ac.id HP:081-2354-2233 p3ai@its.ac.id
PETA KOMPETENSI PEMBELAJARAN Pusat pengembangan pendidikan Dan aktivitas istruksional INSTITUT TEKNOLOGI SEPULUH NOPEMBER ( P3AI ITS ) Syamsul Arifin syamp3ai@its.ac.id HP:081-2354-2233 p3ai@its.ac.id
Workshop Multimedia Pembelajaran Pedoman Pengembangan emateri
 Workshop Multimedia Pembelajaran Pedoman Pengembangan emateri P3AI Surabaya, 22-23 Mei 2012 L/O/G/O Oleh Aulia Siti Aisjah (T.Fisika ITS) Hp : 081-2358-9875 auliasa@ep.its.ac.id Pengertian E-materi Seperangkat
Workshop Multimedia Pembelajaran Pedoman Pengembangan emateri P3AI Surabaya, 22-23 Mei 2012 L/O/G/O Oleh Aulia Siti Aisjah (T.Fisika ITS) Hp : 081-2358-9875 auliasa@ep.its.ac.id Pengertian E-materi Seperangkat
PENYUSUNAN RENCANA PEMBELAJARAN SEMESTER (RPS)
") PENYUSUNAN RENCANA PEMBELAJARAN SEMESTER (RPS) Nurul Widiastuti, PhD Disampaikan di PELATIHAN PEKERTI UNIVERSITAS INTERNASIONAL SEMEN INDONESIA 22-25 Agustus 2016 RUANG LINGKUP STANDAR NASIONAL PENDIDIKAN
PENYUSUNAN RENCANA PEMBELAJARAN SEMESTER (RPS) Nurul Widiastuti, PhD Disampaikan di PELATIHAN PEKERTI UNIVERSITAS INTERNASIONAL SEMEN INDONESIA 22-25 Agustus 2016 RUANG LINGKUP STANDAR NASIONAL PENDIDIKAN
SISTEM PENGENDALIAN OTOMATIS
 RENCANA PEMBELAJARAN SISTEM PENGENDALIAN OTOMATIS 4 sks Mg. Ke Spesific Learning Objective Materi Pembelajaran IndikatorPencapaian Aktivitas Pembelajaran Mhs. Asesmen (Sub-Kompetensi) 1, 2 Mahasiswa mampu
RENCANA PEMBELAJARAN SISTEM PENGENDALIAN OTOMATIS 4 sks Mg. Ke Spesific Learning Objective Materi Pembelajaran IndikatorPencapaian Aktivitas Pembelajaran Mhs. Asesmen (Sub-Kompetensi) 1, 2 Mahasiswa mampu
(4 SKS DAN 3 SKS) MK. SISTEM PENGENDALIAN OTOMATIS KULIAH DARING INDONESIA PANDUAN BELAJAR.
 MK. SISTEM PENGENDALIAN OTOMATIS KULIAH DARING INDONESIA PANDUAN BELAJAR.") PANDUAN BELAJAR MK. SISTEM PENGENDALIAN OTOMATIS (4 SKS DAN 3 SKS) KULIAH DARING INDONESIA www.pditt.belajar.kemdikbud 1 Panduan Belajar pditt.belajar.kemdikbud.go.id - SPO Contact p3ai@its.ac.id MK Daring
PANDUAN BELAJAR MK. SISTEM PENGENDALIAN OTOMATIS (4 SKS DAN 3 SKS) KULIAH DARING INDONESIA www.pditt.belajar.kemdikbud 1 Panduan Belajar pditt.belajar.kemdikbud.go.id - SPO Contact p3ai@its.ac.id MK Daring
Syamsul Arifin. HP:
 Syamsul Arifin syamp3ai@gmail.com p3ai@its.ac.id HP:081-2354-2233 http://share.its.ac.id Beberapa Bentuk Bahan Ajar Buku Ajar. Modul Ajar. Buku Referensi. Monograf Diktat. Audio-Visual (linier or interactive).
Syamsul Arifin syamp3ai@gmail.com p3ai@its.ac.id HP:081-2354-2233 http://share.its.ac.id Beberapa Bentuk Bahan Ajar Buku Ajar. Modul Ajar. Buku Referensi. Monograf Diktat. Audio-Visual (linier or interactive).
SISTEM PENGATURAN LOOP TERTUTUP
 SISTEM PENGATURAN LOOP TERTUTUP PENGANTAR Dalam bahasan ini akan dijelaskan tentang sistem pengaturan loop tertutup : apa yang dimaksud dengan sistem pengaturan loop tertutup, bagaimanakah perilakunya
SISTEM PENGATURAN LOOP TERTUTUP PENGANTAR Dalam bahasan ini akan dijelaskan tentang sistem pengaturan loop tertutup : apa yang dimaksud dengan sistem pengaturan loop tertutup, bagaimanakah perilakunya
SATUAN ACARA PERKULIAHAN
 Topik Bahasan : Pengenalan Konsep-Konsep Dan Karakteristik Umum Sistem Kendali Tujuan Pembelajaran Umum : Mahasiswa Dapat Mendesign Dan Membangun Diagram Blok Sistem Kendali Secara Umum. Jumlah : 1 (satu)
Topik Bahasan : Pengenalan Konsep-Konsep Dan Karakteristik Umum Sistem Kendali Tujuan Pembelajaran Umum : Mahasiswa Dapat Mendesign Dan Membangun Diagram Blok Sistem Kendali Secara Umum. Jumlah : 1 (satu)
ISTILAH ISTILAH DALAM SISTEM PENGENDALIAN
 ISTILAH ISTILAH DALAM SISTEM PENGENDALIAN PENGANTAR Sistem pengendalian khususnya pengendalian otomatis memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi. Dalam bahasan ini, akan
ISTILAH ISTILAH DALAM SISTEM PENGENDALIAN PENGANTAR Sistem pengendalian khususnya pengendalian otomatis memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi. Dalam bahasan ini, akan
Teknik & Strategi Menulis Buku Ajar & Modul Ajar
 LOGO Teknik & Strategi Menulis Buku Ajar & Modul Ajar Syamsul Arifin HP : 081-2354-2233 syamp3ai@its.ac.id syamp3ai@gmail.com. FB:syamp3ai@Hotmail.com Twitter: syam212 Strategi menulis Buku ajar Menulislah
LOGO Teknik & Strategi Menulis Buku Ajar & Modul Ajar Syamsul Arifin HP : 081-2354-2233 syamp3ai@its.ac.id syamp3ai@gmail.com. FB:syamp3ai@Hotmail.com Twitter: syam212 Strategi menulis Buku ajar Menulislah
ISTILAH-ISTILAH DALAM SISTEM PENGATURAN
 ISTILAH-ISTILAH DALAM SISTEM PENGATURAN PENGANTAR Sistem pengaturan khususnya pengaturan otomatis memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi. Dalam bahasan ini, akan diberikan
ISTILAH-ISTILAH DALAM SISTEM PENGATURAN PENGANTAR Sistem pengaturan khususnya pengaturan otomatis memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi. Dalam bahasan ini, akan diberikan
Institut Teknologi Sepuluh Nopember Surabaya MATERI PENGENDALI
 Institut Teknologi Sepuluh Nopember Surabaya MATERI PENGENDALI Contoh Soal Ringkasan Latihan Assessment Kontroler merupakan salah satu komponen dalam sistem pengendalian yang memegang peranan sangat penting.
Institut Teknologi Sepuluh Nopember Surabaya MATERI PENGENDALI Contoh Soal Ringkasan Latihan Assessment Kontroler merupakan salah satu komponen dalam sistem pengendalian yang memegang peranan sangat penting.
ANALISIS PEMBELAJARAN / PETA CAPAIAN PEMBELAJARAN
 I N S A N I N D O N E S I A Y A N G C E R D A S & K O M P R E H E N S I F Aulia Siti Aisjah Hp : 081-235-898-75 auliasa20@gmail.com auliasa@ep.its.ac.id ANALISIS PEMBELAJARAN / PETA CAPAIAN PEMBELAJARAN
I N S A N I N D O N E S I A Y A N G C E R D A S & K O M P R E H E N S I F Aulia Siti Aisjah Hp : 081-235-898-75 auliasa20@gmail.com auliasa@ep.its.ac.id ANALISIS PEMBELAJARAN / PETA CAPAIAN PEMBELAJARAN
1.1. Definisi dan Pengertian
 BAB I PENDAHULUAN Sistem kendali telah memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi. Peranan sistem kendali meliputi semua bidang kehidupan. Dalam peralatan, misalnya proses
BAB I PENDAHULUAN Sistem kendali telah memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi. Peranan sistem kendali meliputi semua bidang kehidupan. Dalam peralatan, misalnya proses
Semua informasi tentang buku ini, silahkan scan QR Code di cover belakang buku ini
 SISTEM KENDALI; Disertai Contoh Soal dan Penyelesaian, oleh Made Santo Gitakarma, S.T., M.T. Hak Cipta 2014 pada penulis GRAHA ILMU Ruko Jambusari 7A Yogyakarta 55283 Telp: 0274-889398; Fax: 0274-889057;
SISTEM KENDALI; Disertai Contoh Soal dan Penyelesaian, oleh Made Santo Gitakarma, S.T., M.T. Hak Cipta 2014 pada penulis GRAHA ILMU Ruko Jambusari 7A Yogyakarta 55283 Telp: 0274-889398; Fax: 0274-889057;
+ - KONTROLER. Σ Kontroler Plant. Aktuator C(s) R(s) Sensor / Elemen ukur
 R(s) Sensor / Elemen ukur") KONTROLER PENGANTAR merupakan salah satu komponen dalam sistem pengaturan yang memegang peranan sangat penting. menghasilkan sinyal kontrol yang menjadi masukan bagi plant sedemikian hingga plant memberikan
KONTROLER PENGANTAR merupakan salah satu komponen dalam sistem pengaturan yang memegang peranan sangat penting. menghasilkan sinyal kontrol yang menjadi masukan bagi plant sedemikian hingga plant memberikan
Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]
![Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]](/thumbs/75/72135311.jpg "Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]") 1 feedback, terutama dalam kecepatan tanggapan menuju keadaan stabilnya. Hal ini disebabkan pengendalian dengan feedforward membutuhkan beban komputasi yang relatif lebih kecil dibanding pengendalian dengan
1 feedback, terutama dalam kecepatan tanggapan menuju keadaan stabilnya. Hal ini disebabkan pengendalian dengan feedforward membutuhkan beban komputasi yang relatif lebih kecil dibanding pengendalian dengan
SATUAN ACARA PERKULIAHAN ( S A P ) STRATEGI PEMBELAJARAN. LCD dengan mata kuliah lainnya serta tujuan dari pembelajaran
 STRATEGI PEMBELAJARAN. LCD dengan mata kuliah lainnya serta tujuan dari pembelajaran") Mata kuliah TEKNIK KENDALI Kode Mata Kuliah/SKS EES 4353/ 3 SKS 3 Waktu Pertemuan 3 X 50 menit = 50 menit 4 Pertemuan-ke ( satu) Mahasiswa dapat memahami sejarah, keperluan dan aplikasi sistem kedali pada
Mata kuliah TEKNIK KENDALI Kode Mata Kuliah/SKS EES 4353/ 3 SKS 3 Waktu Pertemuan 3 X 50 menit = 50 menit 4 Pertemuan-ke ( satu) Mahasiswa dapat memahami sejarah, keperluan dan aplikasi sistem kedali pada
SATUAN ACARA PERKULIAHAN
 Kode dan Mata Kuliah : EL 247 SISTEM KENDALI Topik Bahasan : Pengenalan Konsep-Konsep Dan Karakteristik Umum Sistem Kendali Tujuan Pembelajaran Umum : Mahasiswa Dapat Mendesign Dan Membangun Diagram Blok
Kode dan Mata Kuliah : EL 247 SISTEM KENDALI Topik Bahasan : Pengenalan Konsep-Konsep Dan Karakteristik Umum Sistem Kendali Tujuan Pembelajaran Umum : Mahasiswa Dapat Mendesign Dan Membangun Diagram Blok
I N S A N I N D O N E S I A Y A N G C E R D A S & K O M P R E H E N S I F ANALISIS PEMBELAJARAN / PETA CAPAIAN PEMBELAJARAN
 I N S A N I N D O N E S I A Y A N G C E R D A S & K O M P R E H E N S I F ANALISIS PEMBELAJARAN / PETA CAPAIAN PEMBELAJARAN Aulia Siti Aisjah Hp : 081-235-898-75 auliasa20@gmail.com auliasa@ep.its.ac.id
I N S A N I N D O N E S I A Y A N G C E R D A S & K O M P R E H E N S I F ANALISIS PEMBELAJARAN / PETA CAPAIAN PEMBELAJARAN Aulia Siti Aisjah Hp : 081-235-898-75 auliasa20@gmail.com auliasa@ep.its.ac.id
FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA SILABUS SISTEM KENDALI
 No. SIL/EKA/EKA256/01 Revisi : 00 Tgl : 8 Sept 2014 Hal 1 dari 5 MATA KULIAH KODE MATA KULIAH SEMESTER PROGRAM STUDI DOSEN PENGAMPU : SISTEM KENDALI : EKA256 : III : TEKNIK ELEKTRONIKA : BEKTI WULANDARI,M.Pd
No. SIL/EKA/EKA256/01 Revisi : 00 Tgl : 8 Sept 2014 Hal 1 dari 5 MATA KULIAH KODE MATA KULIAH SEMESTER PROGRAM STUDI DOSEN PENGAMPU : SISTEM KENDALI : EKA256 : III : TEKNIK ELEKTRONIKA : BEKTI WULANDARI,M.Pd
Model Matematis, Sistem Dinamis dan Sistem Kendali
 Model Matematis, Sistem Dinamis dan Sistem Kendali PENDAHULUAN Beberapa istilah pada karakteristik tanggapan : Sistem : kombinasi beberapa komponen yang bekerja secara bersama-sama dan membentuk suatu
Model Matematis, Sistem Dinamis dan Sistem Kendali PENDAHULUAN Beberapa istilah pada karakteristik tanggapan : Sistem : kombinasi beberapa komponen yang bekerja secara bersama-sama dan membentuk suatu
RENCANA PEMBELAJARAN SEMESTER (RPS)
") RENCANA PEMBELAJARAN SEMESTER (RPS) MATA KULIAH PRAKTIKUM SISTEM PENGATURAN DISKRIT (609314 A) PROGRAM STUDI D4 - TEKNIK OTOMASI JURUSAN TEKNIK KELISTRIKAN KAPAL POLITEKNIK PERKAPALAN NEGERI SURABAYA 2017
RENCANA PEMBELAJARAN SEMESTER (RPS) MATA KULIAH PRAKTIKUM SISTEM PENGATURAN DISKRIT (609314 A) PROGRAM STUDI D4 - TEKNIK OTOMASI JURUSAN TEKNIK KELISTRIKAN KAPAL POLITEKNIK PERKAPALAN NEGERI SURABAYA 2017
DAFTAR ISI. HALAMAN JUDUL... i. LEMBAR PENGESAHAN PEMBIMBING... ii. LEMBAR PENGESAHAN DOSEN PENGUJI... iii. HALAMAN PERSEMBAHAN...
 DAFTAR ISI HALAMAN JUDUL... i LEMBAR PENGESAHAN PEMBIMBING... ii LEMBAR PENGESAHAN DOSEN PENGUJI... iii HALAMAN PERSEMBAHAN... iv HALAMAN MOTTO... v KATA PENGANTAR... vii ABSTAKSI... ix DAFTAR ISI... x
DAFTAR ISI HALAMAN JUDUL... i LEMBAR PENGESAHAN PEMBIMBING... ii LEMBAR PENGESAHAN DOSEN PENGUJI... iii HALAMAN PERSEMBAHAN... iv HALAMAN MOTTO... v KATA PENGANTAR... vii ABSTAKSI... ix DAFTAR ISI... x
TUGAS AKHIR RESUME PID. Oleh: Nanda Perdana Putra MN / 2010 Teknik Elektro Industri Teknik Elektro. Fakultas Teknik. Universitas Negeri Padang
 TUGAS AKHIR RESUME PID Oleh: Nanda Perdana Putra MN 55538 / 2010 Teknik Elektro Industri Teknik Elektro Fakultas Teknik Universitas Negeri Padang PROPORSIONAL INTEGRAL DIFERENSIAL (PID) Pendahuluan Sistem
TUGAS AKHIR RESUME PID Oleh: Nanda Perdana Putra MN 55538 / 2010 Teknik Elektro Industri Teknik Elektro Fakultas Teknik Universitas Negeri Padang PROPORSIONAL INTEGRAL DIFERENSIAL (PID) Pendahuluan Sistem
RPKPS (RENCANA PROGRAM DAN KEGIATAN PEMBELAJARAN SEMESTER) TEKNIK KENDALI ES4183. Beban studi: 3 (tiga) sks
 TEKNIK KENDALI ES4183. Beban studi: 3 (tiga) sks") RPKPS (RENCANA PROGRAM DAN KEGIATAN PEMBELAJARAN SEMESTER) TEKNIK KENDALI ES4183 Beban studi: 3 (tiga) sks PROGRAM STUDI STRATA SATU (S-1) TEKNIK ELEKTRO JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
RPKPS (RENCANA PROGRAM DAN KEGIATAN PEMBELAJARAN SEMESTER) TEKNIK KENDALI ES4183 Beban studi: 3 (tiga) sks PROGRAM STUDI STRATA SATU (S-1) TEKNIK ELEKTRO JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
BAB 4 IMPLEMENTASI DAN EVALUASI. perangkat pendukung yang berupa piranti lunak dan perangkat keras. Adapun
 BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Implementasi Perangkat Ajar Dalam perancangan dan pembuatan perangkat ajar ini membutuhkan perangkat pendukung yang berupa piranti lunak dan perangkat keras. Adapun
BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Implementasi Perangkat Ajar Dalam perancangan dan pembuatan perangkat ajar ini membutuhkan perangkat pendukung yang berupa piranti lunak dan perangkat keras. Adapun
5/12/2014. Plant PLANT
 Matakuliah : Teknik Kendali Tahun : 2014 Versi : Pada akhir pertemuan ini, diharapkan mahasiswa akan mampu : menjelaskan gambaran umum dan aplikasi sistem pengaturan di industri menunjukkan kegunaan dasar-dasar
Matakuliah : Teknik Kendali Tahun : 2014 Versi : Pada akhir pertemuan ini, diharapkan mahasiswa akan mampu : menjelaskan gambaran umum dan aplikasi sistem pengaturan di industri menunjukkan kegunaan dasar-dasar
RENCANA PROGRAM KEGIATAN PERKULIAHAN SEMESTER (RPKPS)
") RENCANA PROGRAM KEGIATAN PERKULIAHAN SEMESTER (RPKPS) Kode / Nama Mata Kuliah : E113601 / Semester 5/ Sistem KENDALI Revisi ke : Satuan Kredit Semester : 3 SKS Tgl revisi : Jml Jam kuliah dalam seminggu
RENCANA PROGRAM KEGIATAN PERKULIAHAN SEMESTER (RPKPS) Kode / Nama Mata Kuliah : E113601 / Semester 5/ Sistem KENDALI Revisi ke : Satuan Kredit Semester : 3 SKS Tgl revisi : Jml Jam kuliah dalam seminggu
Kendali Perancangan Kontroler PID dengan Metode Root Locus Mencari PD Kontroler Mencari PI dan PID kontroler...
 DAFTAR ISI LEMBAR PENGESAHAN DOSEN PEMBIMBING... i LEMBAR PENGESAHAN DOSEN PENGUJI... ii HALAMAN PERSEMBAHAN... iii HALAMAN MOTTO... iv KATA PENGANTAR... v ABSTRAK... vii DAFTAR ISI... ix DAFTAR TABEL...
DAFTAR ISI LEMBAR PENGESAHAN DOSEN PEMBIMBING... i LEMBAR PENGESAHAN DOSEN PENGUJI... ii HALAMAN PERSEMBAHAN... iii HALAMAN MOTTO... iv KATA PENGANTAR... v ABSTRAK... vii DAFTAR ISI... ix DAFTAR TABEL...
Model Matematika dari Sistem Dinamis
 Model Matematika dari Sistem Dinamis September 2012 () Model Matematika dari Sistem Dinamis September 2012 1 / 60 Pendahuluan Untuk analisis dan desain sistem kontrol, sistem sis harus dibuat model sisnya.
Model Matematika dari Sistem Dinamis September 2012 () Model Matematika dari Sistem Dinamis September 2012 1 / 60 Pendahuluan Untuk analisis dan desain sistem kontrol, sistem sis harus dibuat model sisnya.
BAB 4 SIMULASI MODEL MATEMATIS CSTR BIODIESEL
 BAB 4 SIMULASI MODEL MATEMATIS CSTR BIODIESEL Pada Bab ini akan dilakukan simulasi model matematis yang didapat di dari Bab sebelumnya. Simulasi akan dilakukan pada model CSTR yang lengkap dan model CSTR
BAB 4 SIMULASI MODEL MATEMATIS CSTR BIODIESEL Pada Bab ini akan dilakukan simulasi model matematis yang didapat di dari Bab sebelumnya. Simulasi akan dilakukan pada model CSTR yang lengkap dan model CSTR
Syamsul Arifin HP : ; Twitter: syam212
 Syamsul Arifin HP : 081-2354-2233 syamp3ai@its.ac.id ; syamp3ai@gmail.com. FB:syamp3ai@Hotmail.com Twitter: syam212 motivasi menulis buku Menulislah dengan alasan dan strategi apapun, asalkan Anda yakin
Syamsul Arifin HP : 081-2354-2233 syamp3ai@its.ac.id ; syamp3ai@gmail.com. FB:syamp3ai@Hotmail.com Twitter: syam212 motivasi menulis buku Menulislah dengan alasan dan strategi apapun, asalkan Anda yakin
BAB 1 PENDAHULUAN. Video shooting adalah serangkaian kegiatan pengambilan gambar bergerak
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Video shooting adalah serangkaian kegiatan pengambilan gambar bergerak dan suara secara bersamaan menggunakan kamera video yang dilakukan secara digital maupun analog.
BAB 1 PENDAHULUAN 1.1 Latar Belakang Video shooting adalah serangkaian kegiatan pengambilan gambar bergerak dan suara secara bersamaan menggunakan kamera video yang dilakukan secara digital maupun analog.
TEKNIK SISTEM KONTROL
 Pendahuluan i i Teknik Sistem Kontrol Daftar Isi iii TEKNIK SISTEM KONTROL Oleh : Sulasno Thomas Agus Prayitno Edisi Pertama Cetakan Pertama, 2006 Hak Cipta 2006 pada penulis, Hak Cipta dilindungi undang-undang.
Pendahuluan i i Teknik Sistem Kontrol Daftar Isi iii TEKNIK SISTEM KONTROL Oleh : Sulasno Thomas Agus Prayitno Edisi Pertama Cetakan Pertama, 2006 Hak Cipta 2006 pada penulis, Hak Cipta dilindungi undang-undang.
PEMBELAJARAN SISTEM KONTROL DENGAN APLIKASI MATLAB
 Jurnal Teknika ISSN : 85-859 Fakultas Teknik Universitas Islam Lamongan Volume No. Tahun PEMBELAJARAN SISTEM KONTROL DENGAN APLIKASI MATLAB Affan Bachri ) Dosen Fakultas Teknik Prodi Elektro Universitas
Jurnal Teknika ISSN : 85-859 Fakultas Teknik Universitas Islam Lamongan Volume No. Tahun PEMBELAJARAN SISTEM KONTROL DENGAN APLIKASI MATLAB Affan Bachri ) Dosen Fakultas Teknik Prodi Elektro Universitas
BAB II KONSEP PERANCANGAN SISTEM KONTROL. menyusun sebuah sistem untuk menghasilkan respon yang diinginkan terhadap
 BAB II KONSEP PERANCANGAN SISTEM KONTROL 2.1 Pengenalan Sistem Kontrol Definisi dari sistem kontrol adalah, jalinan berbagai komponen yang menyusun sebuah sistem untuk menghasilkan respon yang diinginkan
BAB II KONSEP PERANCANGAN SISTEM KONTROL 2.1 Pengenalan Sistem Kontrol Definisi dari sistem kontrol adalah, jalinan berbagai komponen yang menyusun sebuah sistem untuk menghasilkan respon yang diinginkan
MODUL KULIAH SISTEM KENDALI TERDISTRIBUSI
 MODUL KULIAH SISTEM KENDALI TERDISTRIBUSI KONSEP DASAR SISTEM KONTROL Oleh : Muhamad Ali, M.T JURUSAN PENDIDIKAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA TAHUN 2012 0 BAB I KONSEP DASAR
MODUL KULIAH SISTEM KENDALI TERDISTRIBUSI KONSEP DASAR SISTEM KONTROL Oleh : Muhamad Ali, M.T JURUSAN PENDIDIKAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA TAHUN 2012 0 BAB I KONSEP DASAR
DESAIN PENGENDALI HYBRID PROPOTIONAL INTEGRAL SLIDING MODE PADA CONTINUOUS STIRRED TANK REACTOR TUGAS AKHIR
 DESAIN PENGENDALI HYBRID PROPOTIONAL INTEGRAL SLIDING MODE PADA CONTINUOUS STIRRED TANK REACTOR (CSTR) TUGAS AKHIR Diajukan Sebagai Salah Satu Syarat untuk Memperoleh Gelar Sarjana Teknik pada Jurusan
DESAIN PENGENDALI HYBRID PROPOTIONAL INTEGRAL SLIDING MODE PADA CONTINUOUS STIRRED TANK REACTOR (CSTR) TUGAS AKHIR Diajukan Sebagai Salah Satu Syarat untuk Memperoleh Gelar Sarjana Teknik pada Jurusan
Analisa Kestabilan Sistem dalam Penelitian ini di lakukan dengan dua Metode Yaitu:
 Analisa Kestabilan Sistem dalam Penelitian ini di lakukan dengan dua Metode Yaitu: o Analisa Stabilitas Routh Hurwith 1. Suatu metode menentukan kestabilan sistem dengan melihat pole-pole loop tertutup
Analisa Kestabilan Sistem dalam Penelitian ini di lakukan dengan dua Metode Yaitu: o Analisa Stabilitas Routh Hurwith 1. Suatu metode menentukan kestabilan sistem dengan melihat pole-pole loop tertutup
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID
 UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
BAB II TINJAUAN PUSTAKA. Penelitian sebelumnya berjudul Feedforward Feedback Kontrol Sebagai
 BAB II TINJAUAN PUSTAKA 2.1 Studi Pustaka Penelitian sebelumnya berjudul Feedforward Feedback Kontrol Sebagai Pengontrol Suhu Menggunakan Proportional Integral berbasis Mikrokontroler ATMEGA 8535 [3].
BAB II TINJAUAN PUSTAKA 2.1 Studi Pustaka Penelitian sebelumnya berjudul Feedforward Feedback Kontrol Sebagai Pengontrol Suhu Menggunakan Proportional Integral berbasis Mikrokontroler ATMEGA 8535 [3].
Contoh Sistem Skalar Tingkat Pertama 15
 DAFTAR ISI 1 Sistem Pengaturan Otomatis 1 1.1 AplikasiPengaturan Otomatis 1 1.2 Model Sistem Pengaturan 3 DefinisiUmum mengenai Sistem Pengaturan 3 Contoh 1.2-1 Model Kereta Api Mainan 6 Sistem Pengaturan
DAFTAR ISI 1 Sistem Pengaturan Otomatis 1 1.1 AplikasiPengaturan Otomatis 1 1.2 Model Sistem Pengaturan 3 DefinisiUmum mengenai Sistem Pengaturan 3 Contoh 1.2-1 Model Kereta Api Mainan 6 Sistem Pengaturan
BAB I PENDAHULUAN. Salah satu perkembangan pengaplikasian teknologi yang telah lama
 BAB I PENDAHULUAN I.1. Latar Belakang Masalah Dalam perkembangan teknologi elektronika dewasa ini, sudah sangat maju baik dibidang industri, pertanian, kesehatan, pertambangan, perkantoran, dan lain-lain.
BAB I PENDAHULUAN I.1. Latar Belakang Masalah Dalam perkembangan teknologi elektronika dewasa ini, sudah sangat maju baik dibidang industri, pertanian, kesehatan, pertambangan, perkantoran, dan lain-lain.
Simulasi Control System Design dengan Scilab dan Scicos
 Simulasi Control System Design dengan Scilab dan Scicos 1. TUJUAN PERCOBAAN Praktikan dapat menguasai pemodelan sistem, analisa sistem dan desain kontrol sistem dengan software simulasi Scilab dan Scicos.
Simulasi Control System Design dengan Scilab dan Scicos 1. TUJUAN PERCOBAAN Praktikan dapat menguasai pemodelan sistem, analisa sistem dan desain kontrol sistem dengan software simulasi Scilab dan Scicos.
Pertemuan ke. Tujuan pembelajaran khusus (performansi/ indikator) Pokok bahasan dan rincian materi 1 Mahasiswa dapat 1.
 Pokok bahasan dan rincian materi 1 Mahasiswa dapat 1.") Topik bahasan : Permbangan kontrol proses Tujuan pembelajaran umum : Para mahasiswa mengetahui permbangan kontrol proses di industri 1 dapat 1. permbangan menceritakan permbangan kontrol proses kontrol
Topik bahasan : Permbangan kontrol proses Tujuan pembelajaran umum : Para mahasiswa mengetahui permbangan kontrol proses di industri 1 dapat 1. permbangan menceritakan permbangan kontrol proses kontrol
pengendali Konvensional Time invariant P Proportional Kp
 Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
SATUAN ACARA PERKULIAHAN MATA KULIAH : PENGANTAR ROBOTIKA KODE / SKS : / 3 SKS
 Proses Belajar Mengajar Dosen Mahasiswa Mata Pra Syarat SATUAN ACARA PERKULIAHAN : Menjelaskan, Memberi Contoh, Diskusi, Memberi Tugas : Mendengarkan, Mencatat, Diskusi, Mengerjakan Tugas : Mikrokomputer,
Proses Belajar Mengajar Dosen Mahasiswa Mata Pra Syarat SATUAN ACARA PERKULIAHAN : Menjelaskan, Memberi Contoh, Diskusi, Memberi Tugas : Mendengarkan, Mencatat, Diskusi, Mengerjakan Tugas : Mikrokomputer,
BAB III DINAMIKA PROSES
 BAB III DINAMIKA PROSES Tujuan Pembelajaran Umum: Setelah membaca bab ini diharapkan mahasiswa dapat memahami Dinamika Proses dalam Sistem Kendali. Tujuan Pembelajaran Khusus: Setelah mengikuti kuiah ini
BAB III DINAMIKA PROSES Tujuan Pembelajaran Umum: Setelah membaca bab ini diharapkan mahasiswa dapat memahami Dinamika Proses dalam Sistem Kendali. Tujuan Pembelajaran Khusus: Setelah mengikuti kuiah ini
Institut Teknologi Sepuluh Nopember Surabaya. Model Matematik Sistem Elektrik
 Institut Teknologi Sepuluh Nopember Surabaya Model Matematik Sistem Elektrik Hukum Kirchoff 2 Pada bagian ini akan dibahas mengenai pembuatan model matematika dari sistem elektrik baik dalam bentuk persamaan
Institut Teknologi Sepuluh Nopember Surabaya Model Matematik Sistem Elektrik Hukum Kirchoff 2 Pada bagian ini akan dibahas mengenai pembuatan model matematika dari sistem elektrik baik dalam bentuk persamaan
BAB 2 DASAR TEORI. Universitas Indonesia. Pemodelan dan..., Yosi Aditya Sembada, FT UI
 BAB 2 DASAR TEORI Biodiesel adalah bahan bakar alternatif yang diproduksi dari sumber nabati yang dapat diperbaharui untuk digunakan di mesin diesel. Biodiesel mempunyai beberapa kelebihan dibandingkan
BAB 2 DASAR TEORI Biodiesel adalah bahan bakar alternatif yang diproduksi dari sumber nabati yang dapat diperbaharui untuk digunakan di mesin diesel. Biodiesel mempunyai beberapa kelebihan dibandingkan
Perancangan dan Simulasi MRAC PID Control untuk Proses Pengendalian Temperatur pada Continuous Stirred Tank Reactor (CSTR)
") JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: 2337-3539 (2301-9271 Print) A-128 Perancangan dan Simulasi MRAC PID Control untuk Proses Pengendalian Temperatur pada Continuous Stirred Tank Reactor (CSTR)
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: 2337-3539 (2301-9271 Print) A-128 Perancangan dan Simulasi MRAC PID Control untuk Proses Pengendalian Temperatur pada Continuous Stirred Tank Reactor (CSTR)
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN A. Metode Penelitian Metode yang digunakan oleh penyusun dalam melakukan penelitian skripsi ini antara lain: 1. Studi Pustaka, yaitu dengan cara mencari, menggali dan mengkaji
BAB III METODE PENELITIAN A. Metode Penelitian Metode yang digunakan oleh penyusun dalam melakukan penelitian skripsi ini antara lain: 1. Studi Pustaka, yaitu dengan cara mencari, menggali dan mengkaji
Rencana Pembelajaran Departemen Teknik Elektro Fakultas Teknologi Elektro INSTITUT TEKNOLOGI SEPULUH NOPEMBER
 Rencana Pembelajaran Departemen Teknik Elektro Fakultas Teknologi Elektro INSTITUT TEKNOLOGI SEPULUH NOPEMBER 1 Kode & Nama : TE141334 Sinyal dan Sistem 2 Kredit : 3 sks 3 Semester : II (dua) 4 Dosen :
Rencana Pembelajaran Departemen Teknik Elektro Fakultas Teknologi Elektro INSTITUT TEKNOLOGI SEPULUH NOPEMBER 1 Kode & Nama : TE141334 Sinyal dan Sistem 2 Kredit : 3 sks 3 Semester : II (dua) 4 Dosen :
LEMBAR PENGESAHAN HALAMAN PERNYATAAN HALAMAN UCAPAN TERIMA KASIH ABSTRAK DAFTAR ISI DAFTAR TABEL DAFTAR GAMBAR DAFTAR LAMPIRAN
 DAFTAR ISI LEMBAR PENGESAHAN... i HALAMAN PERNYATAAN... ii HALAMAN UCAPAN TERIMA KASIH...iii ABSTRAK... v DAFTAR ISI... vii DAFTAR TABEL... x DAFTAR GAMBAR... xi DAFTAR LAMPIRAN... xiii BAB I PENDAHULUAN...
DAFTAR ISI LEMBAR PENGESAHAN... i HALAMAN PERNYATAAN... ii HALAMAN UCAPAN TERIMA KASIH...iii ABSTRAK... v DAFTAR ISI... vii DAFTAR TABEL... x DAFTAR GAMBAR... xi DAFTAR LAMPIRAN... xiii BAB I PENDAHULUAN...
BAB II TEORI. 2.1 Pengertian Sistem Pengaturan
 BAB II TEORI 2.1 Pengertian Sistem Pengaturan Pengertian kontrol atau pengaturan adalah proses atau upaya untuk mencapai tujuan. Sebagai contoh sederhana dan akrab dengan aktivitas sehari-hari dari konsep
BAB II TEORI 2.1 Pengertian Sistem Pengaturan Pengertian kontrol atau pengaturan adalah proses atau upaya untuk mencapai tujuan. Sebagai contoh sederhana dan akrab dengan aktivitas sehari-hari dari konsep
SATUAN ACARA PERKULIAHAN UNIVERSITAS GUNADARMA
 Mata Kuliah Kode / SKS Program Studi Fakultas : Pengantar Robotika : AK0223 / 2 SKS : Sistem Komputer : Ilmu Komputer & Teknologi Informasi Pengenalan Tentang Disiplin Ilmu Robotika mengetahui tentang
Mata Kuliah Kode / SKS Program Studi Fakultas : Pengantar Robotika : AK0223 / 2 SKS : Sistem Komputer : Ilmu Komputer & Teknologi Informasi Pengenalan Tentang Disiplin Ilmu Robotika mengetahui tentang
BAB II LANDASAN TEORI. berefisiensi tinggi agar menghasilkan produk dengan kualitas baik dalam jumlah
 BAB II LANDASAN TEORI 2.1 Umum Didalam dunia industri, dituntut suatu proses kerja yang aman dan berefisiensi tinggi agar menghasilkan produk dengan kualitas baik dalam jumlah banyak serta dengan waktu
BAB II LANDASAN TEORI 2.1 Umum Didalam dunia industri, dituntut suatu proses kerja yang aman dan berefisiensi tinggi agar menghasilkan produk dengan kualitas baik dalam jumlah banyak serta dengan waktu
STRATEGI PEMBELAJARAN ONLINE
 I N S A N I N D O N E S I A Y A N G C E R D A S & K O M P R E H E N S I F STRATEGI PEMBELAJARAN ONLINE ITS Surabaya, 2 Agustus 2016 Aulia Siti Aisjah Hp : 081-235-898-75 auliasa20@gmail.com auliasa@ep.its.ac.id
I N S A N I N D O N E S I A Y A N G C E R D A S & K O M P R E H E N S I F STRATEGI PEMBELAJARAN ONLINE ITS Surabaya, 2 Agustus 2016 Aulia Siti Aisjah Hp : 081-235-898-75 auliasa20@gmail.com auliasa@ep.its.ac.id
III.11 Metode Tuning BAB IV PELAKSANAAN PENELITIAN IV.1 Alat Penelitian IV.2 Bahan Penelitian IV.3 Tata Laksana Penelitian...
 DAFTAR ISI SKRIPSI... i PERNYATAAN BEBAS PLAGARIASME... ii HALAMAN PENGESAHAN... iii HALAMAN TUGAS... iv KATA PENGANTAR... vii DAFTAR ISI... ix DAFTAR TABEL... x DAFTAR GAMBAR... xi DAFTAR LAMBANG DAN
DAFTAR ISI SKRIPSI... i PERNYATAAN BEBAS PLAGARIASME... ii HALAMAN PENGESAHAN... iii HALAMAN TUGAS... iv KATA PENGANTAR... vii DAFTAR ISI... ix DAFTAR TABEL... x DAFTAR GAMBAR... xi DAFTAR LAMBANG DAN
Controller. Fatchul Arifin
 PID Controller Fatchul Arifin (fatchul@uny.ac.id) PID Controller merupakan salah satu jenis pengatur yang banyak digunakan. Selain itu sistem ini mudah digabungkan dengan metoda pengaturan yang lain seperti
PID Controller Fatchul Arifin (fatchul@uny.ac.id) PID Controller merupakan salah satu jenis pengatur yang banyak digunakan. Selain itu sistem ini mudah digabungkan dengan metoda pengaturan yang lain seperti
PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC
 Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
1.1 DEFINISI PROSES KONTROL
 BAB I PENDAHULUAN TUJUAN PEMBELAJARAN Bab ini akan membahas loop kontrol proses secara keseluruhan yang didalamnya mengandung komponen-komponen yang mendukung pada proses kontrol. Setelah membacanya diharapkan
BAB I PENDAHULUAN TUJUAN PEMBELAJARAN Bab ini akan membahas loop kontrol proses secara keseluruhan yang didalamnya mengandung komponen-komponen yang mendukung pada proses kontrol. Setelah membacanya diharapkan
PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN
 PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN Nazrul Effendy 1), Masrul Solichin 2), Teuku Lukman Nur Hakim 3), Faisal Budiman 4) Jurusan Teknik Fisika, Fakultas
PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN Nazrul Effendy 1), Masrul Solichin 2), Teuku Lukman Nur Hakim 3), Faisal Budiman 4) Jurusan Teknik Fisika, Fakultas
DESAIN INSTRUKSIONAL
 I N S A N I N D O N E S I A Y A N G C E R D A S & K O M P R E H E N S I F Aulia Siti Aisjah Hp : 081-235-898-75 auliasa20@gmail.com auliasa@ep.its.ac.id DESAIN INSTRUKSIONAL INSTITUT TEKNOLOGI SEPULUH
I N S A N I N D O N E S I A Y A N G C E R D A S & K O M P R E H E N S I F Aulia Siti Aisjah Hp : 081-235-898-75 auliasa20@gmail.com auliasa@ep.its.ac.id DESAIN INSTRUKSIONAL INSTITUT TEKNOLOGI SEPULUH
BAB I PENDAHULUAN. penting untuk diperhatikan karena dapat mempengaruhi sistem tegangan. Ketidakstabilan
 BAB I PENDAHULUAN 1.1 Latar Belakang Dalam pembangkitan tenaga listrik, kestabilan tegangan merupakan hal yang sangat penting untuk diperhatikan karena dapat mempengaruhi sistem tegangan. Ketidakstabilan
BAB I PENDAHULUAN 1.1 Latar Belakang Dalam pembangkitan tenaga listrik, kestabilan tegangan merupakan hal yang sangat penting untuk diperhatikan karena dapat mempengaruhi sistem tegangan. Ketidakstabilan
SISTEM KENDALI, oleh Heru Dibyo Laksono, M.T. Hak Cipta 2014 pada penulis GRAHA ILMU Ruko Jambusari 7A Yogyakarta Telp: ;
 SISTEM KENDALI, oleh Heru Dibyo Laksono, M.T. Hak Cipta 2014 pada penulis GRAHA ILMU Ruko Jambusari 7A Yogyakarta 55283 Telp: 0274-4462135; 0274-882262; Fax: 0274-4462136 E-mail: info@grahailmu.co.id Hak
SISTEM KENDALI, oleh Heru Dibyo Laksono, M.T. Hak Cipta 2014 pada penulis GRAHA ILMU Ruko Jambusari 7A Yogyakarta 55283 Telp: 0274-4462135; 0274-882262; Fax: 0274-4462136 E-mail: info@grahailmu.co.id Hak
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA. Penelitian Terkait Perkembangan teknik pengendalian di dunia industri dewasa ini sangat pesat. Banyak penelitian yang telah dilakukan dalam rangka menemukan teknik kendali baru
BAB II TINJAUAN PUSTAKA. Penelitian Terkait Perkembangan teknik pengendalian di dunia industri dewasa ini sangat pesat. Banyak penelitian yang telah dilakukan dalam rangka menemukan teknik kendali baru
Desain PI Controller menggunakan Ziegler Nichols Tuning pada Proses Nonlinier Multivariabel
 Desain PI Controller menggunakan Ziegler Nichols Tuning pada Proses Nonlinier Multivariabel Poppy Dewi Lestari 1, Abdul Hadi 2 Jurusan Teknik Elektro UIN Sultan Syarif Kasim Riau JL.HR Soebrantas km 15
Desain PI Controller menggunakan Ziegler Nichols Tuning pada Proses Nonlinier Multivariabel Poppy Dewi Lestari 1, Abdul Hadi 2 Jurusan Teknik Elektro UIN Sultan Syarif Kasim Riau JL.HR Soebrantas km 15
ASSESSMENT & EVALUASI DALAM PEMBELAJARAN SCL
 Syamsul Arifin Hp : 081-2354-2233 syamp3ai@its.ac.id syamp3ai@gmail.com ASSESSMENT & EVALUASI DALAM PEMBELAJARAN SCL L/O/G/O K U R I K U L U M Sistem Pembelajaran & MONEV Sumber Belajar Sarana REKONSTRUKSI
Syamsul Arifin Hp : 081-2354-2233 syamp3ai@its.ac.id syamp3ai@gmail.com ASSESSMENT & EVALUASI DALAM PEMBELAJARAN SCL L/O/G/O K U R I K U L U M Sistem Pembelajaran & MONEV Sumber Belajar Sarana REKONSTRUKSI
BAB III METODA PENELITIAN
 BAB III METODA PENELITIAN 3.1 TahapanPenelitian berikut ini: Secara umum tahapan penelitian digambarkan seperti pada Gambar 3.1 diagram alir Gambar 3.1 Diagram alir penelitian Agar dapat mencapai tujuan
BAB III METODA PENELITIAN 3.1 TahapanPenelitian berikut ini: Secara umum tahapan penelitian digambarkan seperti pada Gambar 3.1 diagram alir Gambar 3.1 Diagram alir penelitian Agar dapat mencapai tujuan
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
PEMBELAJARAN PERANCANGAN SISTEM KONTROL PID DENGAN MENGGUNAKAN SOFTWARE MATLAB
 ISSN : 1978-6603 PEMBELAJARAN PERANCANGAN SISTEM KONTROL PID DENGAN MENGGUNAKAN SOFTWARE MATLAB Ahmad Yani STT HARAPAN MEDAN E-mail : ahmad_yn9671@yahoo.com Abstrak Abstrak Pembelajaran sistem kontrol
ISSN : 1978-6603 PEMBELAJARAN PERANCANGAN SISTEM KONTROL PID DENGAN MENGGUNAKAN SOFTWARE MATLAB Ahmad Yani STT HARAPAN MEDAN E-mail : ahmad_yn9671@yahoo.com Abstrak Abstrak Pembelajaran sistem kontrol
Institut Teknologi Sepuluh Nopember Surabaya. MATERI Analisa Kestabilan Sistem Berdasar Plot Tempat Kedudukan Akar
 Institut Teknologi Sepuluh Nopember Surabaya MATERI Analisa Kestabilan Sistem Berdasar Plot Tempat Kedudukan Akar Sub Pokok Bahasan Anda akan belajar 1. Analisa kestabilan system berdasarkan letak kedudukan
Institut Teknologi Sepuluh Nopember Surabaya MATERI Analisa Kestabilan Sistem Berdasar Plot Tempat Kedudukan Akar Sub Pokok Bahasan Anda akan belajar 1. Analisa kestabilan system berdasarkan letak kedudukan
POLITEKNIK NEGERI SRIWIJAYA PALEMBANG
 SISTEM KENDALI ANALOG DAN DIGITAL Disusun Oleh: SELLA MARSELIA NIM. 061330310905 Dosen Mata Kuliah : Ir. Siswandi, M.T. PROGRAM STUDI TEKNIK LISTRIK FAKULTAS TEKNIK ELEKTRO POLITEKNIK NEGERI SRIWIJAYA
SISTEM KENDALI ANALOG DAN DIGITAL Disusun Oleh: SELLA MARSELIA NIM. 061330310905 Dosen Mata Kuliah : Ir. Siswandi, M.T. PROGRAM STUDI TEKNIK LISTRIK FAKULTAS TEKNIK ELEKTRO POLITEKNIK NEGERI SRIWIJAYA
Pertemuan-1: Pengenalan Dasar Sistem Kontrol
 Pertemuan-1: Pengenalan Dasar Sistem Kontrol Tujuan Instruksional Khusus (TIK): Mengerti filosopi sistem control dan aplikasinya serta memahami istilahistilah/terminology yang digunakan dalam system control
Pertemuan-1: Pengenalan Dasar Sistem Kontrol Tujuan Instruksional Khusus (TIK): Mengerti filosopi sistem control dan aplikasinya serta memahami istilahistilah/terminology yang digunakan dalam system control
SENSOR DAN TRANDUSER. Aktuator C(s) Sensor / Tranduser
 Sensor / Tranduser") SENSOR DAN TRANDUSER PENGANTAR Pada sistem pengaturan loop tertutup, terkadang bentuk energi dari sinyal keluaran plant tidak sama dengan bentuk energi dari sinyal masukan sehingga tidak dapat dibandingkan,
SENSOR DAN TRANDUSER PENGANTAR Pada sistem pengaturan loop tertutup, terkadang bentuk energi dari sinyal keluaran plant tidak sama dengan bentuk energi dari sinyal masukan sehingga tidak dapat dibandingkan,
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Penggunaan energi listrik telah menjadi kebutuhan utama bagi industri hingga kebutuhan rumah tangga. Karena itu diperlukan suatu pembangkit tenaga listrik yang kontinu
BAB I PENDAHULUAN 1.1 Latar Belakang Penggunaan energi listrik telah menjadi kebutuhan utama bagi industri hingga kebutuhan rumah tangga. Karena itu diperlukan suatu pembangkit tenaga listrik yang kontinu
JURNAL TEKNOLOGI INFORMASI & PENDIDIKAN ISSN : VOL. 4 NO. 1 SEPTEMBER 2011
 PERANCANGAN DAN PENALAAN PENGENDALI PROPORTIONAL INTEGRAL DERIVATIF MENGGUNAKAN SIMULINK Hastuti 1 ABSTRACT This paper describes how to design and to adjust parameters of the PID Controller in order to
PERANCANGAN DAN PENALAAN PENGENDALI PROPORTIONAL INTEGRAL DERIVATIF MENGGUNAKAN SIMULINK Hastuti 1 ABSTRACT This paper describes how to design and to adjust parameters of the PID Controller in order to
PERANCANGAN ATTEMPERATURE REHEAT SPRAY MENGGUNAKAN METODE ZIEGLER NICHOLS BERBASIS MATLAB SIMULINK DI PT. INDONESIA POWER UBP SURALAYA
 TUGAS AKHIR PERANCANGAN ATTEMPERATURE REHEAT SPRAY MENGGUNAKAN METODE ZIEGLER NICHOLS BERBASIS MATLAB SIMULINK DI PT. INDONESIA POWER UBP SURALAYA Diajukan guna melengkapi sebagian syarat dalam mencapai
TUGAS AKHIR PERANCANGAN ATTEMPERATURE REHEAT SPRAY MENGGUNAKAN METODE ZIEGLER NICHOLS BERBASIS MATLAB SIMULINK DI PT. INDONESIA POWER UBP SURALAYA Diajukan guna melengkapi sebagian syarat dalam mencapai
DISAIN KOMPENSATOR UNTUK PLANT MOTOR DC ORDE SATU
 DISAIN KOMPENSATOR UNTUK PLANT MOTOR DC ORDE SATU TUGAS PAPER ANALISA DISAIN SISTEM PENGATURAN Oleh: FAHMIZAL(2209 05 00) Teknik Sistem Pengaturan, Teknik Elektro ITS Surabaya Identifikasi plant Identifikasi
DISAIN KOMPENSATOR UNTUK PLANT MOTOR DC ORDE SATU TUGAS PAPER ANALISA DISAIN SISTEM PENGATURAN Oleh: FAHMIZAL(2209 05 00) Teknik Sistem Pengaturan, Teknik Elektro ITS Surabaya Identifikasi plant Identifikasi
Syahrir Abdussamad, Simulasi Kendalian Flow Control Unit G.U.N.T Tipe 020 dengan Pengendali PID
 Syahrir Abdussamad, Simulasi Kendalian Control Unit G.U.N.T Tipe dengan Pengendali PID MEDIA ELEKTRIK, Volume 4 Nomor, Juni 9 SIMULASI KENDALIAN FLOW CONTROL UNIT G.U.N.T TIPE DENGAN PENGENDALI PID Syahrir
Syahrir Abdussamad, Simulasi Kendalian Control Unit G.U.N.T Tipe dengan Pengendali PID MEDIA ELEKTRIK, Volume 4 Nomor, Juni 9 SIMULASI KENDALIAN FLOW CONTROL UNIT G.U.N.T TIPE DENGAN PENGENDALI PID Syahrir
BAB 3 PERANCANGAN SISTEM. 3.1 Gambaran Umum Pengajaran Mata Kuliah Sistem Pengaturan Dasar
 BAB 3 PERANCANGAN SISTEM 3.1 Gambaran Umum Pengajaran Mata Kuliah Sistem Pengaturan Dasar Mata kuliah Sistem Pengaturan Dasar merupakan mata kuliah yang wajib diambil / dipelajari pada perkuliahan bagi
BAB 3 PERANCANGAN SISTEM 3.1 Gambaran Umum Pengajaran Mata Kuliah Sistem Pengaturan Dasar Mata kuliah Sistem Pengaturan Dasar merupakan mata kuliah yang wajib diambil / dipelajari pada perkuliahan bagi
BAB II TEORI. Proses pengaturan atau pengendalian suatu atau beberapa besaran
 BAB II TEORI II.. Sistem Kontrol Proses pengaturan atau pengendalian suatu atau beberapa besaran (Variabel,Parameter) agar berada pada suatu harga tertentu disebut dengan sistem control. Pengontrolan ini
BAB II TEORI II.. Sistem Kontrol Proses pengaturan atau pengendalian suatu atau beberapa besaran (Variabel,Parameter) agar berada pada suatu harga tertentu disebut dengan sistem control. Pengontrolan ini
PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI PID SEBAGAI PENGONTROL KECEPATAN ROBOT MOBIL PADA LINTASAN DATAR, TANJAKAN, DAN TURUNAN TUGAS AKHIR
 PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI PID SEBAGAI PENGONTROL KECEPATAN ROBOT MOBIL PADA LINTASAN DATAR, TANJAKAN, DAN TURUNAN TUGAS AKHIR Oleh : Imil Hamda Imran NIM : 06175062 Pembimbing I : Ir.
PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI PID SEBAGAI PENGONTROL KECEPATAN ROBOT MOBIL PADA LINTASAN DATAR, TANJAKAN, DAN TURUNAN TUGAS AKHIR Oleh : Imil Hamda Imran NIM : 06175062 Pembimbing I : Ir.
Muhammad Riza A Pembimbing : Hendra Cordova ST, MT. NIP :
 Muhammad Riza A. 248 1 67 Pembimbing : Hendra Cordova ST, MT. NIP : 19695319941211 Latar Belakang Kontrol ph dilakukan untuk menjaga harga ph pada nilai tertentu yang diharapkan. Nilai ph dipengaruhi dari
Muhammad Riza A. 248 1 67 Pembimbing : Hendra Cordova ST, MT. NIP : 19695319941211 Latar Belakang Kontrol ph dilakukan untuk menjaga harga ph pada nilai tertentu yang diharapkan. Nilai ph dipengaruhi dari
BAB III PERENCANAAN DAN REALISASI SISTEM
 42 BAB III PERENCANAAN DAN REALISASI SISTEM Pada bab ini dijelaskan pembuatan alat yang dibuat dalam proyek tugas akhir dengan judul rancang bangun sistem kontrol suhu dan kelembaban berbasis mirkrokontroler
42 BAB III PERENCANAAN DAN REALISASI SISTEM Pada bab ini dijelaskan pembuatan alat yang dibuat dalam proyek tugas akhir dengan judul rancang bangun sistem kontrol suhu dan kelembaban berbasis mirkrokontroler
BAB I PENDAHULUAN. dalam beberapa kasus hingga mengalami kebangkrutan. termometer. Dalam proses tersebut, seringkali operator melakukan kesalahan
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Dalam dunia peternakan terutama peternakan unggas sering kali ditemukan masalah pembusukan telur selama proses penetasan dalam inkubator. Hal tersebut dikarenakan
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Dalam dunia peternakan terutama peternakan unggas sering kali ditemukan masalah pembusukan telur selama proses penetasan dalam inkubator. Hal tersebut dikarenakan
Pengantar Sistem Pengaturan
 Pendahuluan 1 Pengantar Sistem Pengaturan Sistem pengaturan memiliki peranan penting dalam perkembangan dan kemajuan peradaban dan teknologi modern. Dalam prakteknya, setiap aspek aktivitas sehari-hari
Pendahuluan 1 Pengantar Sistem Pengaturan Sistem pengaturan memiliki peranan penting dalam perkembangan dan kemajuan peradaban dan teknologi modern. Dalam prakteknya, setiap aspek aktivitas sehari-hari
PERANCANGAN PENGENDALI POSISI LINIER UNTUK MOTOR DC DENGAN MENGGUNAKAN PID
 PERANCANGAN PENGENDALI POSISI LINIER UNTUK MOTOR DC DENGAN MENGGUNAKAN PID Endra 1 ; Nazar Nazwan 2 ; Dwi Baskoro 3 ; Filian Demi Kusumah 4 1 Jurusan Sistem Komputer, Fakultas Ilmu Komputer, Universitas
PERANCANGAN PENGENDALI POSISI LINIER UNTUK MOTOR DC DENGAN MENGGUNAKAN PID Endra 1 ; Nazar Nazwan 2 ; Dwi Baskoro 3 ; Filian Demi Kusumah 4 1 Jurusan Sistem Komputer, Fakultas Ilmu Komputer, Universitas
PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni
 Oleh : Ika Evi Anggraeni") PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni 206 00 03 Dosen Pembimbing : Dr. Erna Apriliani, M.Si Hendra Cordova, ST,
PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni 206 00 03 Dosen Pembimbing : Dr. Erna Apriliani, M.Si Hendra Cordova, ST,
Dasar Dasar Sistem kontrol
 Dasar Dasar Sistem kontrol Tujuan : 1. Mempelajari dasar dasar system kontrol 2. Mempelajari kontrol lup terbuka dan tertutup 3. Mempelajari prinsip-prinsip disain system kontrol Kompetensi 1. Mampu memahami
Dasar Dasar Sistem kontrol Tujuan : 1. Mempelajari dasar dasar system kontrol 2. Mempelajari kontrol lup terbuka dan tertutup 3. Mempelajari prinsip-prinsip disain system kontrol Kompetensi 1. Mampu memahami
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER
 BERBASIS LOGIC SOLVER") PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
Institut Teknologi Sepuluh Nopember Surabaya. Model Matematik Sistem Mekanik
 Institut Teknologi Sepuluh Nopember Surabaya Model Matematik Sistem Mekanik Gerak Translasi Gerak Rotasi 2 Pada bagian ini akan dibahas mengenai pembuatan model matematika dari sistem mekanika baik dalam
Institut Teknologi Sepuluh Nopember Surabaya Model Matematik Sistem Mekanik Gerak Translasi Gerak Rotasi 2 Pada bagian ini akan dibahas mengenai pembuatan model matematika dari sistem mekanika baik dalam
UNIVERSITAS INDONESIA PEMODELAN DAN SIMULASI SISTEM KENDALI CONTINOUS STIRRED TANK REACTOR (CSTR) BIODIESEL THESIS YOSI ADITYA SEMBADA
 BIODIESEL THESIS YOSI ADITYA SEMBADA") UNIVERSITAS INDONESIA PEMODELAN DAN SIMULASI SISTEM KENDALI CONTINOUS STIRRED TANK REACTOR (CSTR) BIODIESEL THESIS YOSI ADITYA SEMBADA 0906495772 FAKULTAS TEKNIK PROGRAM STUDI TEKNIK ELEKTRO DEPOK DESEMBER
UNIVERSITAS INDONESIA PEMODELAN DAN SIMULASI SISTEM KENDALI CONTINOUS STIRRED TANK REACTOR (CSTR) BIODIESEL THESIS YOSI ADITYA SEMBADA 0906495772 FAKULTAS TEKNIK PROGRAM STUDI TEKNIK ELEKTRO DEPOK DESEMBER
Implementasi Rencana Pembelajaran Daring. Trihastuti Agustinah
 Workshop E-Learning Implementasi Rencana Pembelajaran Daring Trihastuti Agustinah P3AI Institut Teknologi Sepuluh Nopember Surabaya, 2014 Outline Rencana Pembelajaran (RP) Desain Konten Pembelajaran (KP)
Workshop E-Learning Implementasi Rencana Pembelajaran Daring Trihastuti Agustinah P3AI Institut Teknologi Sepuluh Nopember Surabaya, 2014 Outline Rencana Pembelajaran (RP) Desain Konten Pembelajaran (KP)
Suatu fungsi alih dapat direpresentasikan sebagai blok diagram, perhatikan gambar berikut : G 2 (s) Y 1 (s) Sistem Dalam Hubungan Seri
 Y 1 (s) Sistem Dalam Hubungan Seri") DIARAM BLOK Suatu fungsi alih dapat direpresentasikan sebagai blok diagram, perhatikan gambar berikut : (s) Fungsi alih dan Sistem. Sistem Sistem dalam Hubungan Seri (s) 2 (s) Masukan Y (s) Sistem Dalam
DIARAM BLOK Suatu fungsi alih dapat direpresentasikan sebagai blok diagram, perhatikan gambar berikut : (s) Fungsi alih dan Sistem. Sistem Sistem dalam Hubungan Seri (s) 2 (s) Masukan Y (s) Sistem Dalam
VIII Sistem Kendali Proses 7.1
 VIII Sistem Kendali Proses 7.1 Pengantar ke Proses 1. Tentang apakah pengendalian proses itu? - Mengenai mengoperasikan sebuah proses sedemikian rupa hingga karakteristik proses yang penting dapat dijaga
VIII Sistem Kendali Proses 7.1 Pengantar ke Proses 1. Tentang apakah pengendalian proses itu? - Mengenai mengoperasikan sebuah proses sedemikian rupa hingga karakteristik proses yang penting dapat dijaga
DAFTAR ISI. SKRIPSI... ii
 DAFTAR ISI SKRIPSI... i SKRIPSI... ii PERNYATAAN... iii HALAMAN PENGESAHAN... iv KATA PENGANTAR... v DAFTAR ISI... vii DAFTAR GAMBAR... ix DAFTAR TABEL... xi INTISARI... xii ABSTRACT... xiii BAB I PENDAHULUAN...
DAFTAR ISI SKRIPSI... i SKRIPSI... ii PERNYATAAN... iii HALAMAN PENGESAHAN... iv KATA PENGANTAR... v DAFTAR ISI... vii DAFTAR GAMBAR... ix DAFTAR TABEL... xi INTISARI... xii ABSTRACT... xiii BAB I PENDAHULUAN...
PEMODELAN DINAMIS PENGATURAN FREKUENSI MOTOR AC BERBEBAN MENGGUNAKAN PID
 PEMODELAN DINAMIS PENGATURAN FREKUENSI MOTOR AC BERBEBAN MENGGUNAKAN PID Oleh : 1.Eka Agung Renata S 6907040019 2.Nurul Mahabbah 6907040023 LATAR BELAKANG Penggunaan motor AC 3 fasa saat ini banyak digunakan
PEMODELAN DINAMIS PENGATURAN FREKUENSI MOTOR AC BERBEBAN MENGGUNAKAN PID Oleh : 1.Eka Agung Renata S 6907040019 2.Nurul Mahabbah 6907040023 LATAR BELAKANG Penggunaan motor AC 3 fasa saat ini banyak digunakan