PENGEMBANGAN ALGORITMA UNTUK ESTIMASI POSISI PADA SISTEM NAVIGASI DAN TRAYEKTORI WAHANA NIR AWAK BAWAH AIR ITS AUV 01
|
|
|
- Susanti Budiono
- 6 tahun lalu
- Tontonan:
Transkripsi
1 Sidang Tugas Akhir TM PENGEMBANGAN ALGORITMA UNTUK ESTIMASI POSISI PADA SISTEM NAVIGASI DAN TRAYEKTORI WAHANA NIR AWAK BAWAH AIR ITS AUV 01 Oleh : Gustiyadi Fathur R. ( ) Dosen Pembimbing: Hendro Nurhadi, Dipl.-Ing., Ph.D ( ) Subchan, Ssi., MSc., PhD ( )
2 Contents BAB 1 BAB 2 BAB 3 BAB 4 BAB 5 PENDAHULUAN TINJAUAN PUSTAKA METODOLOGI ANALISA DAN PEMBAHASAN KESIMPULAN DAN SARAN DAFTAR PUSTAKA

3 BAB 1 PENDAHULUAN RUMUSAN DAN BATASAN MASALAH
4 LATAR BELAKANG Unmanned Underwater Vehicle AUV ROV Aplikasi di beberapa sektor bidang (sains, lingkungan, militer dll) Gangguan internal dan eksternal Metode Ensemble Kalman Filter (EnKF) Perancangan algoritma estimasi posisi pada sistem navigasi & trayektori
5 RUMUSAN DAN BATASAN MASALAH Rumusan Masalah Bagaimana mengimplementasi EnKF untuk mengestimasi posisi AUV dengan trayektori yang sudah ditentukan? Batasan Masalah a. Sistem bersifat time invariant b. AUV memiliki GPS c. Trayektori sudah ditentukan dan rintangan diabaikan d. Kecepatan AUV maksimal 4 knot (2 m/s) e. Kedalaman maksimal 50 m f. Dimensi AUV ialah panjang 1500 mm dan diameter 200 mm g. Pemodelan gerak AUV diproyeksikan pada 2 dimensi h. Simulasi hanya dilakukan untuk gerak translasi saja i. Simulasi dilakukan dengan bantuan program Matlab
6 TUJUAN DAN MANFAAT TUJUAN : Mendapatkan hasil estimasi posisi AUV dengan trayektori yang telah ditentukan dan menggunakan metode Ensemble Kalman Filter (EnKF). MANFAAT : Memberikan gambaran bagaimana EnKF mengestimasi posisi AUV sesuai trayektori. Sebagai penunjang penelitian khusus pada bidang robotika. Dapat diterapkan dalam teknologi yang menunjang pertahanan dan keamanan NKRI. Sebagai tambahan kepustakaan untuk penelitian selanjutnya.


7 BAB 2 Hasil Studi Peneliti Terdahulu Dasar Teori Tinjauan Pustaka Pengembangan Algoritma
8 Hasil Studi Peneliti Terdahulu Penelitian mengenai estimasi lintasan AUV telah dilakukan oleh Risa Fitria [4]. Metode estimasi yang digunakan adalah Ensemble Kalman Filter (EnKF) dengan persamaan sistem dinamika kapal selam berdasarkan persamaan Morrison [6]. Penelitian yang dilakukan oleh Achmad Ichwan [3] adalah mengestimasi posisi kapal selam dengan mengimplementasikan metode Extended Kalman Filter (EKF) pada persamaan sistem dinamika berdasarkan persamaan Morrison [6].
9 DASAR TEORI Algoritma Rigid Body Kinematika AUV Hydrodynamics
10 Desain ITS AUV Gambar 1. ITS AUV 01
11 Kinematika AUV Posisi dan Sudut Euler 1 T T [, 2 ] T 1 [ x, y, z] T T 2 [,, ] Kecepatan linier dan Anguler T T [ v, v T 1 2 ] 1 [ u, v, w] T 2 [ p, q, r] T Gaya dan Momen 1 T T [, 2 ] T 1 [ X, Y, Z] T 1 [ K, M, N] T

 cos cos sin cos sin sin cos cos sin sin sin sin sin")

12 Koordinat Rotasi pada EFF C x, cos sin Kecepatan Linier 0 sin cos C y, cos 0 sin J 0 sin cos C C C C z T T T 1 ( 2 ) z, y, x, cos sin, sin cos J 1 ( 2 ) cos cos sin cos sin sin cos cos sin sin sin sin sin cos cos cos sin sin sin cos sin cos cos sin sin sin cos cos cos X 3 X 2 ψ X 1 Y 1 Y 0 ϕ θ X 2 Y 3 Y 2 ψ ϕ Z 1 Z 0 θ Z 2 Z 1
13 Rigid Body Equation AUV m m m I x 1. Surge 2 2 u vr wq x ( q r ) y ( pq r ) z ( pr q ) X 2. Sway 3. Heave 4. Roll G 2 2 v wp ur y ( r pr ) z ( qr p ) x ( qp r ) Y G 2 2 w uq vp z ( p qp ) x ( rp q ) y ( rq p ) Z p ( I z I y G ) qr ( r pq) I xz Persamaan gerak 6 DOF (SNAME 1950) ( r 2 G G G q 2 ) I yz G G G ( pr q ) I xy m y ( w uq vp) z ( v wp ur) K G G 5. Pitch I y q ( I x I z ) rp ( p qr) I xy ( p 2 r 2 ) I zx ( qp r ) I yz m z ( u vr wq) x ( w uq vp) M G G I z 6. Yaw r ( I I ) pq ( q rp) I y x yz ( q 2 p 2 ) I xy ( rq p ) I zx m x ( v wp ur) y ( u vr wq) N G G
 hidrostatis added mass drag lift")
14 Hidrodinamika AUV Gaya dan Momen Luar () hidrostatis added mass drag lift thrust
15 Gravitasi B B G [0 0 W] G J l 1 1 ( 2 ) G T C G C B Bouyancy W W B [ 0 0 B] l 1 1 ( 2 ) B J B T B B B c B C B hidrostatis C G C G W W W Posisi tidak stabil sehingga timbul momen agar stabil


16 T added mass 2 Bidang Sama

17 added mass
18 x x y u z δ s β e u δ r β e V fluida v W fin V fluida re r re se s se drag


19 A R wingspan planform l A 2 s C L A 2 R l A S C. L C L L C L Av e 2 lift
u 1 ( n in i ti ti x n i i x xt r M T F 1 1 3 1 1 3 dimana Persamaan Umum")
20 thrust D ω Gaya dan Momen Thruster p p T t p p T t J K D J K D T ) ( 2 1 ) ( D V J P A V A )u 1 ( n in i ti ti x n i i x xt r M T F dimana Persamaan Umum
21 Total Gaya dan Momen Translasi sepanjang arah x : Translasi sepanjang arah y : Translasi sepanjang arah z :
22 Rotasi sepanjang arah x : Rotasi sepanjang arah y : Rotasi sepanjang arah z :
23 Ensemble Kalman Filter (EnKF) Merupakan salah satu metode dalam asimilasi data yang telah banyak digunakan untuk mengestimasi berbagai persoalan bentuk model sistem nonlinear, dan mampu menyelesaikan model sistem dinamik nonlinear dan ruang keadaan (state space) yang besar. Ada tiga tahapan : Tahap inisialisasi Tahap prediksi (time update step) Tahap koreksi (measurement update step).

 ( k T k T k k R H HP H P K k k k P H K I P ] [ ) ˆ ( ˆ,,,, i k i k k i k i k x H z K x x")
24 Algoritma Ensemble Kalman Filter (EnKF) Inisialisasi Tentukan nilai awal Tahap Prediksi Estimasi Kovarian Error Tahap Koreksi Kalman Gain Estimasi Kovarian Error ] [, 0 0,3 0,2 0,1, 0 N i x x x x x N i i x N x 1 0 ˆ0, 1 ˆ i k k k k w u x f x, 1 1 ), ( ˆ ˆ T k i k N i k i k k x x x x N P ) ˆ )( ˆ ˆ ( ˆ 1 1, 1, N i i k x k N x 1, ˆ 1 ˆ i k k i k v z z,, 1 ) ( k T k T k k R H HP H P K k k k P H K I P ] [ ) ˆ ( ˆ,,,, i k i k k i k i k x H z K x x
25 BAB 3 METODOLOGI Penelitian Program
26 FLOWCHART PENELITIAN START Kajian Pustaka Spesifikasi Dimensi dan Dinamika Gerak AUV Menentukan Desain AUV dan Trayektori Mendapatkan Persamaan Gerak AUV pada 6 DOF RMS Error 0 ~ 1? T Y Menganalisa Hasil Simulasi Menarik Kesimpulan dari Hasil Simulasi END
27 FLOWCHART PROGRAM
28
29 BAB 4 ANALISA & PEMBAHASAN 4.1 Diskritisasi Model AUV 4.2 Penambahan Faktor Stokastik 4.3 Implementasi Model ITS AUV pada Algoritma EnKF 4.4 Simulasi dan Analisa
30 Diskritisasi Model AUV Metode Pendiskritan Beda Hingga Maju Translasi sepanjang arah x :
31 Translasi sepanjang arah y : Translasi sepanjang arah z :
32 Penambahan Faktor Stokastik Model Stokastik : fungsi nonlinear dimana w k v k H ialah noise sistem Q k (program) ialah noise pengukuran R k (program) ialah matriks data sampel/pengukuran


33 Implementasi Model ITS AUV pada Algoritma EnKF Mendefinisikan x pada fungsi x k+1 : Model Sistem penentuan nilai awal untuk masing-masing posisi (nol)
34 Model Pengukuran satu jenis data ukur yaitu komponen u satu jenis data ukur yaitu komponen v satu jenis data ukur yaitu komponen w dua jenis data ukur yaitu komponen u dan v dua jenis data ukur yaitu komponen u dan w dua jenis data ukur yaitu komponen v dan w Sebagai contoh : H = 2 sampel, yaitu v dan w
35 Inisialisasi Pembangkitan sejumlah ensemble awal + noise-nya : Menghitung nilai mean dari setiap state :
36 Menghitung nilai error ensemble awal :

37 Tahap Prediksi Menghitung nilai prediksi awal + noise-nya : Menghitung nilai mean ensemble :

38 Menghitung nilai ensemble error :
39 Tahap Koreksi Menghitung data pengukuran : Menghitung Kalman Gain : Perhitungan estimasi koreksi : Perhitungan nilai mean estimasi koreksi : Perhitungan kovariansi error :
40 Simulasi dan Analisa 100 Ensemble (Simulasi ke-1)


41
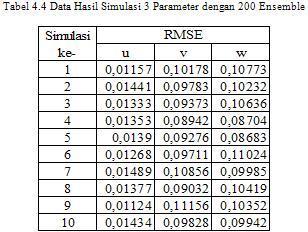
42 200 Ensemble (Simulasi ke-3)

43
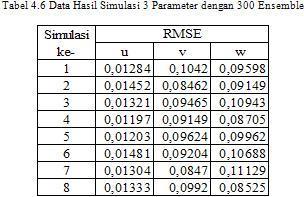
44 300 Ensemble (Simulasi ke-6)

45
46 400 Ensemble (Simulasi ke-8)


47

48 Semakin besar jumlah ensemble semakin kecil nilai RMSE RMSE Gabungan
49 5.1 Kesimpulan 5.2 Saran BAB 5
50 Kesimpulan Metode Ensemble Kalman Filter (EnKF) yang digunakan telah berhasil diimplementasikan untuk sistem navigasi pada bagian estimasi posisi pada gerak translasi yaitu surging, swaying, heaving. Hal ini terlihat dari besarnya RMSE yang relatif kecil pada tiap statenya. Hasil terbaik yang didapatkan dari hasil simulasi dengan menggunakan empat parameter data pengukuran dan 1000x iterasi adalah : a. Ensemble 100 simulasi 1 RMSE surging = 0,013127; swaying = 0,09812; dan heaving = 0, b. Ensemble 200 simulasi 3 RMSE surging = 0,01336; swaying = 0,09814; dan heaving = 0, c. Ensemble 300 simulasi 6 RMSE surging = 0,01342; swaying = 0,09449; dan heaving = 0, d. Ensemble 400 simulasi 8 RMSE surging = 0,013137; swaying = 0,098465; dan heaving = 0, Dari hasil nilai RMSE rata-rata pada tabel 4.9 teori hubungan antara jumlah ensemble yang digunakan terhadap nilai RMSE yang diperoleh seharusnya berbanding terbalik dimana semakin bertambah jumlah ensemble-nya maka semakin kecil nilai RMSE yang diperoleh, tidak terbukti. Kemungkinan distribusi normal pada noise dan tidak adanya sistem kontrol.
51 Saran Ketika menurunkan persamaan dinamika AUV, diharapkan untuk menghitung semua komponen-komponen gayanya sehingga dalam penyesuaian parameter (penerapan asumsi yang harus ditiadakan) pada saat implementasi suatu metode menghasilkan kondisi yang sebenarnya. Metode EnKF juga dapat diterapkan untuk estimasi posisi ketika AUV melakukan gerak rotasi, yaitu pitching, yawing, dan rolling.
52 DAFTAR PUSTAKA Budiyanto,D Sistem Permesinan Kapal Selam Evensen, G The ensemble Kalman filter: theoretical formulation and practical implementation, Ocean Dynamics, 53: Ichwan, A Estimasi posisi Kapal Selam Menggunakan metode Extended Kalman Filter. Tugas Akhir, Institut Teknologi Sepuluh Nopember, Surabaya Fitria, Risa Implementasi Ensemble Kalman Filter pada Estimasi Kecepatan Kapal Selam. Tugas Akhir, Institut Teknologi Sepuluh Nopember, Surabaya Lewis, F.L Optimal Estimation with an Introduction to Stochastic Control Theory, John Wiley & Sons., New York Purnomo, Kosala Dwidja Aplikasi Metode Ensemble Kalman Filter pada Model Populasi Plankton. Institut Teknologi Sepuluh Nopember: Surabaya Jeffi, Trio Pengembangan Sistem Kendali Robust AUV dengan Metode Sliding-PID. Institut Teknologi Sepuluh Nopember: Surabaya Walchko, K. J., Novick, David, and Nechyba, M. C Development of a Sliding Mode Control Sistem with Extended Kalman Filter Estimation for Subjugator, University of Florida Gainesville, FL, Nahon, Meyer A Simplified Dynamics Model for Autonomous Underwater Vehicle. University of Victoria: Canada
53 Jwo, Dah-Jing dan Ta-Shun Cho Critical remarks on the linearised and extended Kalman filters with geodetic navigation examples. Journal, measurement XXX (1-13). Taiwan. Luknanto, Djoko. Hidraulika Komputasi, Metoda Beda Hingga. Jurusan Teknik sipil. Universitas Gadjah Mada. Nisa, Fitri Parsa Sistem Pengendali Gerak Pada Kapal Selam Menggunakan Metode Sliding Mode Control. Tugas Akhir. Institut Teknologi Sepuluh Nopember, Surabaya Yang, Chen Modular Modeling and Control for Autonomous Underwater Vehicle (AUV), Departement of Mechanical Engineering National University of Singapore. Singapore T. Perez, Ø.N. Smogeli, T.I. Fossen and A.J. Sørensen An Overview of Marine Systems Simulator (MSS): A Simulink Toolbox for Narine Control System. SIMS2005-Scandinavian Conference on Simulation and Modelling. T. I., Fossen A Nonlinear Unified State-space Model for Ship Maneuvering and Control in A Seaway. Journal of Bifurcation and Chaos. Louis Andrew Gonzalez Design, Modelling and Control of an Autonomous Underwater Vehicle, mobile Robotics Laboratory, center for Intelligent Information Processing Systems, School of Electrical, Electronic and Computer engineering, The University of Western Australia. Lewis, M. J, dkk Dynamic Data Assimilation: A Least Squares Approach. University Press, Cambridge. Setiawan, Agus Rancang Bangun Prototype Kapal Selam Tanpa Awak (ITS AUV-01) dengan Aplikasi IMU, Kompas, dan GPS Module.Institut Teknologi Sepuluh Nopember: Surabaya
54
55 LAMPIRAN PROGRAM SIMULASI M.FILE clear all; clc; clf; % Data Awal: m=19.8; %vehicle mass in (kg) g=9.81; %gravitaty acceleration in (m/s^2) rho=1025; %fluid density in (kg/m^3) dt=0.1; xg=0.062; yg= ; zg=0.05; xb=0.062; yb=0; zb= 0; volume= ; %vehicle volum in (m^3) Dprop=0.01; %propeller diameter in (m)
56 Kt=0.2265; %thrust coefficient alpha1=0.4; %wake fraction number (0.1 ~ 0.4) omegap=2400; %rotating rate propeller in (rpm) css=0.07; %axial drag Ap= / ; %top view projected area in (m^2) Af=(0.5*4*pi*0.1^2)+(4*0.18*0.01); %front view projected area in (m^2) cdc=0.01; %drag koefisien silinder [S.F. Hoerner] Dv=0.2; %dimeter vehivle in (m) l=1.5; %vehicle length in (m) alpha2= ; %empirical parameter (interpolasi) Dh=0.2; %hull diameter in (m) t=0.571; %fin taper ratio afin=0.25; %max fin height above the vehicle centerline in (m) rmean=0.35; %mean fin height above the vehicle centerline in (m) xfin=0.638; %momen arm wrt the origin~fin cyb=0.003; %6.7<=(l/Dh)<=10 cydb=(l/dh)*cyb; xcp=0.75; %momen arm wrt the origin~body (0.5*l)
57 dr=(30)*pi/180; ds=(30)*pi/180; Ix= ; Iy= ; Iz= ; xn0=0.5; xm0=0.4; xt0=0.4; Sfin= ; Sn1=5.141; Sm1=1; St1=0; Sn2= ; Sm2=1; St2=0; Sn3= ; Sm3=1; St3=0; %vertical fin angles referenced to the vehicle hull %horizontal fin angles referenced to the vehicle hull %(m) %(m) %(m) %(m^2)
58 Sn4= ; Sm4=1; St4=0; Sn5= ; Sm5=1; St5=2.7691e+33; Sn6= ; Sm6=1; St6= e+37; Sn7= ; Sm7=1; St7= e+39; u0=0; v0=0; w0=0; uawal=2; %(m/s = uawal*2 knot) [u dlm persamaan Va] I=1000; %jumlah iterasi N=400; %jumlah ensemble yang dibangkitkan (100, 200, 300 & 400)
59 W=m*g; B=rho*g*volume; Va=(1-alpha1)*uawal; cd=(css*pi*ap*(l+((60*(dv/l)^3))+((0.25*dv)/l)))/af; J=Va/(omegap*Dprop); cdf= *t; clalpha=1/((1/(2*pi*0.3))+(1/(pi*0.5))); for i=1:i/4 %sudut pitch di titik pitch1(1,i)=(-2)*pi/180; end for i=1:i/4 %sudut pitch di titik pitch2(1,i)=(0)*pi/180; end for i=1:i/4 %sudut pitch di titik pitch3(1,i)=(0)*pi/180; end
60 for i=1:i/4 %sudut pitch di titik pitch4(1,i)=(0)*pi/180; end pitch=[pitch1,pitch2,pitch3,pitch4]; for k=1:i sdtpit1=sin(pitch(k)); sdtpit2=cos(pitch(k)); end for j=1:i/2 %sudut roll di titik 1-50 roll1(1,j)=(0)*pi/180; end for j=1:i/2 %sudut roll di titik roll2(1,j)=(0)*pi/180; end roll=[roll1, roll2]; for o=1:j sdtrol1=sin(roll(o)); sdtrol2=cos(roll(o)); end
61 % Gaya Hidrostatis: Xres=(B-W)*sdtpit1; Yres=(W-B)*sdtpit2*sdtrol1; Zres=(W-B)*sdtpit2*sdtrol2; % Axial~Crossflow~Rolling Drag Coefficient: Xuu=-(0.5*rho*cd*Af); Yvv=(-rho*cdc*(Sn1+Sm1+St1))-(rho*Sfin*cdf); Zww=Yvv; Yrr=(-rho*cdc*(Sn3+Sm3+St3))-... (2*rho*cdc*((xn0*Sn2)+(xm0*Sm2)+(xt0*St2)))-... (rho*cdc*((xn0^2*sn1)+(xm0^2*sm1)+(xt0^2*st1)))-... (rho*sfin*cdf*xfin*abs(xfin)); Zqq=-Yrr; % Body Lift: Yuvl=-(0.5*rho*Dh^2*cydb); Zuwl=Yuvl;
62 %Axial~Crossflow~Rolling Added Mass Coefficient: Xudot=-(alpha2*rho*pi*l*Dh^2)/6; Yvdot=-(Sn5+Sm5+St5); Zwdot=Yvdot; Mwdot=(Sn6+Sm6+St6)+((xn0*Sn5)+(xm0*Sm5)+(xt0*St5)); Zqdot=Mwdot; Nvdot=-Mwdot; Yrdot=Nvdot; % fin Lift: Yuudr=rho*clalpha*Sfin; Yuvf=-Yuudr; Zuuds=-Yuudr; Zuwf=-Zuuds; % Propeller Force & Moment: Xprop=0.5*rho*(Dprop^4)*Kt*J*omegap; Kprop=0.5*rho*(Dprop^5)*Kt*J*omegap;
63 u(1)=u0; v(1)=v0; w(1)=w0; Q1=0.001*pi/180; Q2=0.001; Q3=0.001; Q11=[Q1 0 0;0 Q2 0;0 0 Q3]; R1=0.01*pi/180; R2=0.01; R3=0.01; R11=[R1 0 0;0 R2 0;0 0 R3];
64 H1=eye(3); % H1=[1 0 0]; %u sebagai data pengukuran % H1=[0 1 0]; %v sebagai data pengukuran % H1=[0 0 1]; %w sebagai data pengukuran % H1=[1 0 0;0 1 0]; %u dan v sebagai data pengukuran % H1=[1 0 0;0 0 1]; %u dan w sebagai data pengukuran %H1=[0 1 0;0 0 1]; %v dan w sebagai data pengukuran x001=[u(1) v(1) w(1)]'; % Membangkitkan Ensemble Awal for ens=1:n u2d=x001(1,1)+normrnd(0,sqrt(q1),1,1); v2d=x001(2,1)+normrnd(0,sqrt(q2),1,1); w2d=x001(3,1)+normrnd(0,sqrt(q3),1,1); x01(:,ens)=[u2d v2d w2d]'; end
65 x01mean=mean(x01,2); xpre01=x01mean; xcor1=x01mean; rek1(1,1)=x001(1,1); rek1(2,1)=x001(2,1); rek1(3,1)=x001(3,1); Rekam1(1,1)=xcor1(1,1); Rekam1(2,1)=xcor1(2,1); Rekam1(3,1)=xcor1(3,1); u2(1)=x01mean(1,1); v2(1)=x01mean(2,1); w2(1)=x01mean(3,1);
66 for k=1:i % Sistem Real : Uu(k)=((Xres)+(Xuu*u(k)*abs(u(k)))+(Xprop))/(m-Xudot); Vv(k)=((Yres)+(Yvv*v(k)*abs(v(k)))+((Yuvl+Yuvf)*u(k)*v(k))+... (Yuudr*u(k)^2*dr))/(m-Yvdot); Ww(k)=((Zres)+(Zww*w(k)*abs(w(k)))+((Zuwl+Zuwf)*u(k)*w(k))+... (Zuuds*u(k)^2*ds))/(m-Zwdot); u(k+1)=uu(k)*dt+u(k)+normrnd(0,sqrt(q1),1,1); v(k+1)=vv(k)*dt+v(k)+normrnd(0,sqrt(q2),1,1); w(k+1)=ww(k)*dt+w(k)+normrnd(0,sqrt(q3),1,1); xreal1=[u(k+1) v(k+1) w(k+1)]'; rek1(1,k+1)=u(k+1); rek1(2,k+1)=v(k+1); rek1(3,k+1)=w(k+1);
67 z1=h1*xreal1+sqrt(r11)*randn(3,1); % untuk H identitas % z1 = H1*xreal1+sqrt(R1)*randn(1,1); % untuk H u [1 0 0] % z1 = H1*xreal1+sqrt(R2)*randn(1,1); % untuk H v [0 1 0] % z1 = H1*xreal1+sqrt(R3)*randn(1,1); % untuk H w [0 0 1] % z1 = H1*xreal1+sqrt([R1 0;0 R2])*randn(2,1); % untuk H u dan v [1 0 0;0 1 0] % z1 = H1*xreal1+sqrt([R1 0;0 R3])*randn(2,1); % untuk H u dan w [1 0 0;0 0 1] %z1 = H1*xreal1+sqrt([R2 0;0 R3])*randn(2,1); % untuk H v dan w [0 1 0;0 0 1] %-----> TAHAP PREDIKSI % Estimasi Ensemble Uu2(k)=((Xres)+(Xuu*u(k)*abs(u(k)))+(Xprop))/(m-Xudot); Vv2(k)=((Yres)+(Yvv*v(k)*abs(v(k)))+((Yuvl+Yuvf)*u(k)*v(k))+... (Yuudr*u(k)^2*dr))/(m-Yvdot); Ww2(k)=((Zres)+(Zww*w(k)*abs(w(k)))+((Zuwl+Zuwf)*u(k)*w(k))+... (Zuuds*u(k)^2*ds))/(m-Zwdot);
68 u2(k+1)=uu2(k)*dt+u2(k)+normrnd(0,sqrt(q1),1,1); v2(k+1)=vv2(k)*dt+v2(k)+normrnd(0,sqrt(q2),1,1); w2(k+1)=ww2(k)*dt+w2(k)+normrnd(0,sqrt(q3),1,1); for ens=1:n u2d_new=u2(k+1)+normrnd(0,sqrt(q1),1,1); v2d_new=v2(k+1)+normrnd(0,sqrt(q2),1,1); w2d_new=w2(k+1)+normrnd(0,sqrt(q3),1,1); xpre1(:,ens)=[u2d_new v2d_new w2d_new]'; end % Mean (rata-rata) Ensemble xpre_rt1=mean(xpre1,2); % Error Ensemble for ens=1:n xpre_rt2(:,ens)=xpre_rt1; end
69 ek1=xpre1-xpre_rt2; % Kovarian Error Ensemble C7=ek1*ek1'; Ppre1=(1/(N-1))*C7; %----> TAHAP KOREKSI for ens=1:n z1_new(:,ens) = z1+sqrt(r11)*randn(3,1); % untuk H identitas % z1_new(:,ens) = z1+sqrt(r1)*randn(1,1); % untuk H u [1 0 0] % z1_new(:,ens) = z1+sqrt(r2)*randn(1,1); % untuk H v [0 1 0] % z1_new(:,ens) = z1+sqrt(r3)*randn(1,1); % untuk H w [0 0 1] % z1_new(:,ens) = z1+sqrt([r1 0;0 R2])*randn(2,1); % untuk H u dan v [1 0 0;0 1 0] % z1_new(:,ens) = z1+sqrt([r1 0;0 R3])*randn(2,1); % untuk H u dan w [1 0 0;0 0 1] %z1_new(:,ens) = z1+sqrt([r2 0;0 R3])*randn(2,1); % untuk H v dan w [0 1 0;0 0 1] end
70 % Kalman Gain K1=Ppre1*H1'*inv(H1*Ppre1*H1'+R11); % untuk H identitas % K1=Ppre1*H1'*inv(H1*Ppre1*H1'+R1); % untuk H u [1 0 0] % K1=Ppre1*H1'*inv(H1*Ppre1*H1'+R2); % untuk H v [0 1 0] % K1=Ppre1*H1'*inv(H1*Ppre1*H1'+R3); % untuk H w [0 0 1] % K1=Ppre1*H1'*inv(H1*Ppre1*H1'+[R1 0;0 R2]); % untuk H u dan v [1 0 0;0 1 0] % K1=Ppre1*H1'*inv(H1*Ppre1*H1'+[R1 0;0 R3]); % untuk H u dan w [1 0 0;0 0 1] %K1=Ppre1*H1'*inv(H1*Ppre1*H1'+[R2 0;0 R3]); % untuk H v dan w [0 1 0;0 0 1] % Menghitung Estimasi Ensemble xcor1 = xpre1+k1*(z1_new-h1*xpre1); % Menghitung Estimasi xcor1 = mean(xcor1,2); Rekam1(1,k+1) = xcor1(1); Rekam1(2,k+1) = xcor1(2); Rekam1(3,k+1) = xcor1(3);
71 pcor1 = [eye(3)-k1*h1]*ppre1; % Kovarian Error u2(k+1) = xcor1(1); v2(k+1) = xcor1(2); w2(k+1) = xcor1(3); % estimasi RMSE(Root Mean Square Error/Rata-rata Error Akar Kuadrat) erru=abs(rek1(1,:)-rekam1(1,:)); errou(k)=(erru(k))^2; erroru=sqrt(mean(errou,2)); errv=abs(rek1(2,:)-rekam1(2,:)); errov(k)=(errv(k))^2; errorv=sqrt(mean(errov,2)); errw=abs(rek1(3,:)-rekam1(3,:)); errow(k)=(errw(k))^2; errorw=sqrt(mean(errow,2)); end
72 disp(['rms Error pada u = ',num2str(erroru)]); disp(['rms Error pada v = ',num2str(errorv)]); disp(['rms Error pada w = ',num2str(errorw)]); %Plot hasil simulasi %Proyeksi Gerak antara uv, uw dan vw figure (1) % subplot(1,3,1) plot((rek1(1,:)),rek1(2,:),'-r',rekam1(1,:),rekam1(2,:),'-b') grid on; title('proyeksi Gerak AUV terhadap Bidang X-Y'); xlabel('x (m)'); ylabel('y (m)'); legend('reference','enkf');
73 figure(2) % subplot(1,3,2) plot((rek1(1,:)),rek1(3,:),'-r',rekam1(1,:),rekam1(3,:),'-b') grid on; title('proyeksi Gerak AUV terhadap Bidang X-Z'); xlabel('x (m)'); ylabel('z (m)'); legend('reference','enkf'); figure(3) % subplot(1,3,3) plot((rek1(2,:)),rek1(3,:),'-r',rekam1(2,:),rekam1(3,:),'-b') grid on; title('proyeksi Gerak AUV terhadap Bidang Y-Z'); xlabel('y (m)'); ylabel('z (m)'); legend('reference','enkf');
74 % Gerak antara u, v dan w terhadap iterasi figure (4) subplot(3,1,1) plot((1:i+1),rek1(1,:),'-r',(1:i+1),rekam1(1,:),'-b') grid on; title('estimasi u'); xlabel('iterasi'); ylabel('posisi (+) akselerasi (-) deselerasi (m)'); legend('reference','enkf'); subplot(3,1,2) plot((1:i+1),rek1(2,:),'-r',(1:i+1),rekam1(2,:),'-b') grid on; title('estimasi v'); xlabel('iterasi'); ylabel('posisi (+) kiri; (-) kanan (m)'); legend('reference','enkf');
75 subplot(3,1,3) plot((1:i+1),rek1(3,:),'-r',(1:i+1),rekam1(3,:),'-b') grid on; title('estimasi w'); xlabel('iterasi'); ylabel('posisi (+) naik; (-) turun (m)'); legend('reference','enkf');
IMPLEMENTASI ENSEMBLE KALMAN FILTER PADA ESTIMASI KECEPATAN KAPAL SELAM
 SIDANG TUGAS AKHIR IMPLEMENTASI ENSEMBLE KALMAN FILTER PADA ESTIMASI KEEPATAN KAPAL SELAM Oleh: RISA FITRIA 57 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
SIDANG TUGAS AKHIR IMPLEMENTASI ENSEMBLE KALMAN FILTER PADA ESTIMASI KEEPATAN KAPAL SELAM Oleh: RISA FITRIA 57 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
DESAIN SISTEM KENDALI GERAK SURGE DAN ROLL PADA SISTEM AUTONOMOUS UNDERWATER VEHICLE DENGAN METODE SLIDING MODE CONTROL (SMC)
") PROSEDING DESAIN SISTEM KENDALI GERAK SURGE DAN ROLL PADA SISTEM AUTONOMOUS UNDERWATER VEHICLE DENGAN METODE SLIDING MODE CONTROL (SMC) Teguh Herlambang, Hendro Nurhadi Program Studi Sistem Informasi Universitas
PROSEDING DESAIN SISTEM KENDALI GERAK SURGE DAN ROLL PADA SISTEM AUTONOMOUS UNDERWATER VEHICLE DENGAN METODE SLIDING MODE CONTROL (SMC) Teguh Herlambang, Hendro Nurhadi Program Studi Sistem Informasi Universitas
TUGAS AKHIR. ESTIMASI POSISI MAGNETIC LEVITATION BALL MENGGUNAKAN METODE ENSEMBLE KALMAN FILTER (EnKF) Oleh: ARIEF RACHMAN
 Oleh: ARIEF RACHMAN") TUGAS AKHIR ESTIMASI POSISI MAGNETIC LEVITATION BALL MENGGUNAKAN METODE ENSEMBLE KALMAN FILTER (EnKF) Oleh: ARIEF RACHMAN 1206 100 710 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT
TUGAS AKHIR ESTIMASI POSISI MAGNETIC LEVITATION BALL MENGGUNAKAN METODE ENSEMBLE KALMAN FILTER (EnKF) Oleh: ARIEF RACHMAN 1206 100 710 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT
Implementasi Ensemble Kalman Filter (Enkf) Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler
 Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler") Implementasi Ensemble Kalman Filter (Enkf) Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler Ahmad Nasrullah Jamaludin 1, Erna Apriliani 1, Hendra Cordova 2, Teguh Herlambang 3 1
Implementasi Ensemble Kalman Filter (Enkf) Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler Ahmad Nasrullah Jamaludin 1, Erna Apriliani 1, Hendra Cordova 2, Teguh Herlambang 3 1
Optimasi Model Linier 6-DOF pada Sistem Autonomous Underwater Vehicle
 Seminar Nasional Maritim, Sains, dan Teknologi Terapan 216 Vol. 1 Politeknik Perkapalan Negeri Surabaya, 21 November 216 ISSN: 2548-159 Optimasi Model Linier 6-DOF pada Sistem Autonomous Underwater Vehicle
Seminar Nasional Maritim, Sains, dan Teknologi Terapan 216 Vol. 1 Politeknik Perkapalan Negeri Surabaya, 21 November 216 ISSN: 2548-159 Optimasi Model Linier 6-DOF pada Sistem Autonomous Underwater Vehicle
Estimasi Variabel Dinamik Kapal Menggunakan Metode Kalman Filter
 JURNAL TEKNIK POMITS Vol., No., () ISSN: 79 (-97 Print) E-8 Estimasi Variabel Dinamik Kapal Menggunakan Metode Kalman Filter Nathanael Leon Gozali ), Aulia Siti Aisjah ), dan Erna Apriliani ) ) Jurusan
JURNAL TEKNIK POMITS Vol., No., () ISSN: 79 (-97 Print) E-8 Estimasi Variabel Dinamik Kapal Menggunakan Metode Kalman Filter Nathanael Leon Gozali ), Aulia Siti Aisjah ), dan Erna Apriliani ) ) Jurusan
ESTIMASI POSISI ROBOT MOBIL MENGGUNAKAN UNSCENTED KALMAN FILTER. Oleh: Miftahuddin ( )
") ESTIMASI POSISI ROBOT MOBIL MENGGUNAKAN UNSCENTED KALMAN FILTER Oleh: Miftahuddin (1206 100 707) Dosen Pembimbing: Subchan, Ph.D Dr. Erna Apriliani, M.Si Abstrak Robot Mobil atau Mobile Robot adalah konstruksi
ESTIMASI POSISI ROBOT MOBIL MENGGUNAKAN UNSCENTED KALMAN FILTER Oleh: Miftahuddin (1206 100 707) Dosen Pembimbing: Subchan, Ph.D Dr. Erna Apriliani, M.Si Abstrak Robot Mobil atau Mobile Robot adalah konstruksi
Perbandingan Metode Kalman Filter, Extended Kalman Filter, dan Ensemble Kalman Filter pada Model Penyebaran Virus HIV/AIDS
 J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 15, No. 1, Maret 2018, 17-29 Perbandingan Metode Kalman Filter, Extended Kalman Filter, dan Ensemble Kalman Filter pada Model Penyebaran
J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 15, No. 1, Maret 2018, 17-29 Perbandingan Metode Kalman Filter, Extended Kalman Filter, dan Ensemble Kalman Filter pada Model Penyebaran
Estimasi Posisi Mobile Robot Menggunakan Metode Akar Kuadrat Unscented Kalman Filter (AK-UKF)
") Estimasi Posisi Mobile Robot Menggunakan Metode Akar Kuadrat Unscented Kalman Filter (AK-UKF) Teguh Herlambang 1), Reizano Amri Rasyid 2), Sri Hartatik 3), Dinita Rahmalia 4) 1) Program Studi Sistem Informasi
Estimasi Posisi Mobile Robot Menggunakan Metode Akar Kuadrat Unscented Kalman Filter (AK-UKF) Teguh Herlambang 1), Reizano Amri Rasyid 2), Sri Hartatik 3), Dinita Rahmalia 4) 1) Program Studi Sistem Informasi
Estimasi Solusi Model Pertumbuhan Logistik dengan Metode Ensemble Kalman Filter
 Jurnal ILMU DASAR, Vol.14, No,2, Juli 2013 : 85-90 85 Estimasi Solusi Model Pertumbuhan Logistik dengan Metode Ensemble Kalman Filter Solution Estimation of Logistic Growth Model with Ensemble Kalman Filter
Jurnal ILMU DASAR, Vol.14, No,2, Juli 2013 : 85-90 85 Estimasi Solusi Model Pertumbuhan Logistik dengan Metode Ensemble Kalman Filter Solution Estimation of Logistic Growth Model with Ensemble Kalman Filter
SIMULASI DAN ANALISA DINAMIKA REMOTELY OPERATED VEHICLE (ROV)
") Jurnal Teknik Mesin S-1, Vol. 3, No. 1, Tahun 215 SIMULASI DAN ANALISA DINAMIKA REMOTELY OPERATED VEHICLE (ROV) *Hujjatul Anam 1, Joga Dharma Setiawan 2 1 Mahasiswa Jurusan Teknik Mesin, Fakultas Teknik,
Jurnal Teknik Mesin S-1, Vol. 3, No. 1, Tahun 215 SIMULASI DAN ANALISA DINAMIKA REMOTELY OPERATED VEHICLE (ROV) *Hujjatul Anam 1, Joga Dharma Setiawan 2 1 Mahasiswa Jurusan Teknik Mesin, Fakultas Teknik,
SEMINAR TUGAS AKHIR. Penerapan Metode Ensemble Kalman Filter untuk Estimasi Kecepatan dan Ketinggian Gelombang Non Linear pada Pantai
 SEMINAR TUGAS AKHIR Penerapan Metode Ensemble Kalman Filter untuk Estimasi Kecepatan dan Ketinggian Gelombang Non Linear pada Pantai Oleh: Fadila Rahmana 1208 100 044 Abstrak Gelombang laut telah menjadi
SEMINAR TUGAS AKHIR Penerapan Metode Ensemble Kalman Filter untuk Estimasi Kecepatan dan Ketinggian Gelombang Non Linear pada Pantai Oleh: Fadila Rahmana 1208 100 044 Abstrak Gelombang laut telah menjadi
Optimasi Pada Misil Menggunakan Bang-Bang Control Dan Ensamble Kalman Filter
 Optimasi Pada Misil Menggunakan Bang-Bang Control Dan Ensamble Kalman Filter Ahmad Zaenal Arifin Jurusan Matematika, Fakultas MIPA, Universitas PGRI Ronggolawe Tuban (UNIROW) E-Mail: kuyafira@gmail.com
Optimasi Pada Misil Menggunakan Bang-Bang Control Dan Ensamble Kalman Filter Ahmad Zaenal Arifin Jurusan Matematika, Fakultas MIPA, Universitas PGRI Ronggolawe Tuban (UNIROW) E-Mail: kuyafira@gmail.com
DESAIN SISTEM KENDALI GERAK SURGE, SWAY DAN YAW PADA AUTONOMOUS UNDERWATER VEHICLE DENGAN METODE SLIDING MODE CONTROL (SMC)
") J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 14, No. 1, Mei 2017, 53 60 DESAIN SISTEM KENDALI GERAK SURGE, SWAY DAN YAW PADA AUTONOMOUS UNDERWATER VEHICLE DENGAN METODE SLIDING MODE
J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 14, No. 1, Mei 2017, 53 60 DESAIN SISTEM KENDALI GERAK SURGE, SWAY DAN YAW PADA AUTONOMOUS UNDERWATER VEHICLE DENGAN METODE SLIDING MODE
Oleh: Dimas Avian Maulana Dosen Pembimbing: Subchan, Ph.D
 Oleh: Dimas Avian Maulana-1207100045 Dosen Pembimbing: Subchan, Ph.D Robot mobil adalah salah satu contoh dari wahana nir awak (WaNA) yang dapat dikendalikan dari jauh atau memiliki sistem pengendali otomatis
Oleh: Dimas Avian Maulana-1207100045 Dosen Pembimbing: Subchan, Ph.D Robot mobil adalah salah satu contoh dari wahana nir awak (WaNA) yang dapat dikendalikan dari jauh atau memiliki sistem pengendali otomatis
PERANCANGAN KONTROL NON-LINIER UNTUK KESTABILAN HOVER PADA UAV TRICOPTER DENGAN SLIDING MODE CONTROL
 Presentasi Tesis PERANCANGAN KONTROL NON-LNER UNTUK KESTABLAN HOVER PADA UAV TRCOPTER DENGAN SLDNG MODE CONTROL RUDY KURNAWAN 2211202009 Dosen Pembimbing: DR. r. Mochammad Rameli r. Rusdhianto Effendie
Presentasi Tesis PERANCANGAN KONTROL NON-LNER UNTUK KESTABLAN HOVER PADA UAV TRCOPTER DENGAN SLDNG MODE CONTROL RUDY KURNAWAN 2211202009 Dosen Pembimbing: DR. r. Mochammad Rameli r. Rusdhianto Effendie
PENERAPAN MODEL PREDICTIVE CONTROL (MPC) PADA DESAIN PENGENDALIAN ROBOT MOBIL BERODA EMPAT
 PADA DESAIN PENGENDALIAN ROBOT MOBIL BERODA EMPAT") PENERAPAN MODEL PREDICTIVE CONTROL (MPC) PADA DESAIN PENGENDALIAN ROBOT MOBIL BERODA EMPAT oleh: Dimas Avian Maulana 1207 100 045 Dosen Pembimbing: Subchan, M.Sc., Ph.D Abstrak Robot mobil adalah salah
PENERAPAN MODEL PREDICTIVE CONTROL (MPC) PADA DESAIN PENGENDALIAN ROBOT MOBIL BERODA EMPAT oleh: Dimas Avian Maulana 1207 100 045 Dosen Pembimbing: Subchan, M.Sc., Ph.D Abstrak Robot mobil adalah salah
PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK
 PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK Oleh : AHMAD ADHIM 2107100703 Dosen Pembimbing : Hendro Nurhadi, Dipl.-Ing., Ph.D. PENDAHULUAN LATAR BELAKANG Kebanyakan
PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK Oleh : AHMAD ADHIM 2107100703 Dosen Pembimbing : Hendro Nurhadi, Dipl.-Ing., Ph.D. PENDAHULUAN LATAR BELAKANG Kebanyakan
Metode Asimilasi Data sebagai Estimasi Penyelesaian Masalah-masalah Lingkungan
 J. of Math. and Its Appl. ISSN: 1829-605X Vol. 1, No. 1 (2004), 19 Metode Asimilasi Data sebagai Estimasi Penyelesaian Masalah-masalah Lingkungan Erna Apriliani Jurusan Matematika Institut Teknologi Sepuluh
J. of Math. and Its Appl. ISSN: 1829-605X Vol. 1, No. 1 (2004), 19 Metode Asimilasi Data sebagai Estimasi Penyelesaian Masalah-masalah Lingkungan Erna Apriliani Jurusan Matematika Institut Teknologi Sepuluh
ALGORITMA ADAPTIVE COVARIANCE RANK UNSCENTED KALMAN FILTER UNTUK ESTIMASI KEADAAN PADA PERSAMAAN AIR DANGKAL
 ALGORITMA ADAPTIVE COVARIANCE RANK UNSCENTED KALMAN FILTER UNTUK ESTIMASI KEADAAN PADA PERSAMAAN AIR DANGKAL Habib Hasbullah 1, Erna Apriliani 2 1 Mahasiswa Program Studi S2, Jurusan Matematika, F-MIPA,
ALGORITMA ADAPTIVE COVARIANCE RANK UNSCENTED KALMAN FILTER UNTUK ESTIMASI KEADAAN PADA PERSAMAAN AIR DANGKAL Habib Hasbullah 1, Erna Apriliani 2 1 Mahasiswa Program Studi S2, Jurusan Matematika, F-MIPA,
UNIVERSITAS DIPONEGORO TUGAS AKHIR FATURRAKHMAN KHAIRAN L2E FAKULTAS TEKNIK JURUSAN TEKNIK MESIN SEMARANG
 UNIVERSITAS DIPONEGORO DISAIN KONTROL UNTUK AUTONOMOUS UNDERWATER VEHICLE TUGAS AKHIR FATURRAKHMAN KHAIRAN L2E 006 039 FAKULTAS TEKNIK JURUSAN TEKNIK MESIN SEMARANG DESEMBER 2011 Diberikan kepada : Nama
UNIVERSITAS DIPONEGORO DISAIN KONTROL UNTUK AUTONOMOUS UNDERWATER VEHICLE TUGAS AKHIR FATURRAKHMAN KHAIRAN L2E 006 039 FAKULTAS TEKNIK JURUSAN TEKNIK MESIN SEMARANG DESEMBER 2011 Diberikan kepada : Nama
Penerapan Model Predictive Control (MPC) pada Desain Pengendalian Robot Mobil Beroda Empat
 pada Desain Pengendalian Robot Mobil Beroda Empat") Penerapan Model Predictive Control (MPC) pada Desain Pengendalian Robot Mobil Beroda Empat Dimas Avian Maulana 1 1 Universitas Negeri Surabaya email: dimasmaulana@unesa.ac.id ABSTRAK Robot mobil adalah
Penerapan Model Predictive Control (MPC) pada Desain Pengendalian Robot Mobil Beroda Empat Dimas Avian Maulana 1 1 Universitas Negeri Surabaya email: dimasmaulana@unesa.ac.id ABSTRAK Robot mobil adalah
Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda
 E97 Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda Yansen Prayitno dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
E97 Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda Yansen Prayitno dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
R = matriks pembobot pada fungsi kriteria. dalam perancangan kontrol LQR
 DAFTAR NOTASI η = vektor orientasi arah x = posisi surge (m) y = posisi sway (m) z = posisi heave (m) φ = sudut roll (rad) θ = sudut pitch (rad) ψ = sudut yaw (rad) ψ = sudut yaw frekuensi rendah (rad)
DAFTAR NOTASI η = vektor orientasi arah x = posisi surge (m) y = posisi sway (m) z = posisi heave (m) φ = sudut roll (rad) θ = sudut pitch (rad) ψ = sudut yaw (rad) ψ = sudut yaw frekuensi rendah (rad)
BAB III EXTENDED KALMAN FILTER DISKRIT. Extended Kalman Filter adalah perluasan dari Kalman Filter. Extended
 26 BAB III EXTENDED KALMAN FILTER DISKRIT 3.1 Pendahuluan Extended Kalman Filter adalah perluasan dari Kalman Filter. Extended Kalman Filter merupakan algoritma yang digunakan untuk mengestimasi variabel
26 BAB III EXTENDED KALMAN FILTER DISKRIT 3.1 Pendahuluan Extended Kalman Filter adalah perluasan dari Kalman Filter. Extended Kalman Filter merupakan algoritma yang digunakan untuk mengestimasi variabel
DESAIN PENGENDALIAN ROBOT MOBIL BERODA MENGGUNAKAN METODE SLIDING MODE CONTROL (SMC) Oleh: Ratnawati
 Oleh: Ratnawati") DESAIN PENGENDALIAN ROBOT MOBIL BERODA MENGGUNAKAN METODE SLIDING MODE CONTROL (SMC) Oleh: Ratnawati 1207 100 063 Dosen Pembimbing: Subchan, M.Sc, Ph.D Abstrak Kendaraan tanpa awak dalam bentuk robot mobil
DESAIN PENGENDALIAN ROBOT MOBIL BERODA MENGGUNAKAN METODE SLIDING MODE CONTROL (SMC) Oleh: Ratnawati 1207 100 063 Dosen Pembimbing: Subchan, M.Sc, Ph.D Abstrak Kendaraan tanpa awak dalam bentuk robot mobil
Calyptra : Jurnal Ilmiah Mahasiswa Universitas Surabaya Vol.4 No.2 (2015)
") Estimasi Parameter Model Height-Roll-Pitch-Yaw AR Drone dengan Least Square Method Steven Tanto Teknik Elektro / Fakultas Teknik steventanto@gmail.com Agung Prayitno Teknik Elektro / Fakultas Teknik prayitno_agung@staff.ubaya.ac.id
Estimasi Parameter Model Height-Roll-Pitch-Yaw AR Drone dengan Least Square Method Steven Tanto Teknik Elektro / Fakultas Teknik steventanto@gmail.com Agung Prayitno Teknik Elektro / Fakultas Teknik prayitno_agung@staff.ubaya.ac.id
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan negara kepulauan terbesar di dunia. Wilayah laut Indonesia mencapai 70% dari luas total wilayah Indonesia. Hal ini menjadi tugas besar bagi TNI
BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan negara kepulauan terbesar di dunia. Wilayah laut Indonesia mencapai 70% dari luas total wilayah Indonesia. Hal ini menjadi tugas besar bagi TNI
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan negara kepulauan dengan luas wilayah daratan Indonesia lebih dari 2.012.402 km 2 dan luas perairannya lebih dari 5.877.879 km 2 yang menjadikan
BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan negara kepulauan dengan luas wilayah daratan Indonesia lebih dari 2.012.402 km 2 dan luas perairannya lebih dari 5.877.879 km 2 yang menjadikan
LAMPIRAN A MATRIKS LEMMA
 LAMPIRAN A MATRIKS LEMMA Dengan menganggap menjadi sebuah matriks dengan dimensi, dan adalah vektor dari dimensi, maka didapatkan persamaan: (A.1) Dengan menggunakan persamaan (2.32) dan (2.38), didapatkan
LAMPIRAN A MATRIKS LEMMA Dengan menganggap menjadi sebuah matriks dengan dimensi, dan adalah vektor dari dimensi, maka didapatkan persamaan: (A.1) Dengan menggunakan persamaan (2.32) dan (2.38), didapatkan
STUDY SIMULASI AUTOPILOT KAPAL DENGAN LAB VIEW
 + PRO S ID IN G 20 1 1 HASIL PENELITIAN FAKULTAS TEKNIK STUDY SIMULASI AUTOPILOT KAPAL DENGAN LAB VIEW Jurusan Perkapalan Fakultas Teknik Universitas Hasanuddin Jl. Perintis Kemerdekaan Km. 10 Tamalanrea
+ PRO S ID IN G 20 1 1 HASIL PENELITIAN FAKULTAS TEKNIK STUDY SIMULASI AUTOPILOT KAPAL DENGAN LAB VIEW Jurusan Perkapalan Fakultas Teknik Universitas Hasanuddin Jl. Perintis Kemerdekaan Km. 10 Tamalanrea
Dosen Penguji: Ir. Aziz Achmad Khoirul Effendi,ST., MSc.Eng. Dr. Dhanny Arifianto,ST.,M.Eng.
 Dosen Penguji: Ir. Aziz Achmad Khoirul Effendi,ST., MSc.Eng. Dr. Dhanny Arifianto,ST.,M.Eng. Pembimbing: Hendro Nurhadi, Dipl-Ing.,Phd Presented By: MIRZA GHULAM INDRALAKSANA 2107100013 Jurusan Teknik
Dosen Penguji: Ir. Aziz Achmad Khoirul Effendi,ST., MSc.Eng. Dr. Dhanny Arifianto,ST.,M.Eng. Pembimbing: Hendro Nurhadi, Dipl-Ing.,Phd Presented By: MIRZA GHULAM INDRALAKSANA 2107100013 Jurusan Teknik
MODIFIKASI PERSAMAAN QUATERNION PADA ALGORITMA INS UNTUK APLIKASI ROKET
 Jurnal Teknologi Dirgantara Vol. 8 No. 2 Desember 2010:98-107 MODIFIKASI PERSAMAAN QUATERNION PADA ALGORITMA INS UNTUK APLIKASI ROKET Romi Wiryadinata *), Wahyu Widada **) *) Jurusan Teknik Elektro, Fakultas
Jurnal Teknologi Dirgantara Vol. 8 No. 2 Desember 2010:98-107 MODIFIKASI PERSAMAAN QUATERNION PADA ALGORITMA INS UNTUK APLIKASI ROKET Romi Wiryadinata *), Wahyu Widada **) *) Jurusan Teknik Elektro, Fakultas
APLIKASI METODE STATE FEEDBACK LINEARIZATION PADA SISTEM KENDALI GERAK KAPAL
 APLIKASI METODE STATE FEEDBACK LINEARIZATION PADA SISTEM KENDALI GERAK KAPAL Dosen Pembimbing: DR. Erna Apriliani M.Si DWI ARIYANI K 1209100044 JURUSAN MATEMATIKA ITS FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
APLIKASI METODE STATE FEEDBACK LINEARIZATION PADA SISTEM KENDALI GERAK KAPAL Dosen Pembimbing: DR. Erna Apriliani M.Si DWI ARIYANI K 1209100044 JURUSAN MATEMATIKA ITS FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ANALISA KESTABILAN PERSAMAAN GERAK ROKET TIGA DIMENSI TIPE RKX- 200 LAPAN DAN SIMULASINYA
 ANALISA KESTABILAN PERSAMAAN GERAK ROKET TIGA DIMENSI TIPE RKX- 200 LAPAN DAN SIMULASINYA MOHAMMAD RIFA I 1208100703 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI
ANALISA KESTABILAN PERSAMAAN GERAK ROKET TIGA DIMENSI TIPE RKX- 200 LAPAN DAN SIMULASINYA MOHAMMAD RIFA I 1208100703 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI
Pemodelan dan Analisa Getaran Mesin Bensin 650 cc 2 Silinder Segaris dengan Sudut Engkol 180 untuk Rubber Mount
 Sidang Tugas Akhir Bidang Studi : Desain Pemodelan dan Analisa Getaran Mesin Bensin 65 cc Silinder Segaris dengan Sudut Engkol 8 untuk Rubber Mount Disusun Oleh: Mela Agus Christianti NRP. 9 36 Dosen Pembimbing:
Sidang Tugas Akhir Bidang Studi : Desain Pemodelan dan Analisa Getaran Mesin Bensin 65 cc Silinder Segaris dengan Sudut Engkol 8 untuk Rubber Mount Disusun Oleh: Mela Agus Christianti NRP. 9 36 Dosen Pembimbing:
PENERAPAN DISTURBANCE COMPENSATING MODEL PREDICTIVE CONTROL (DC-MPC) PADA KENDALI GERAK KAPAL
 PADA KENDALI GERAK KAPAL") PENERAPAN DISTURBANCE COMPENSATING MODEL PREDICTIVE CONTROL (DC-MPC) PADA KENDALI GERAK KAPAL Nama : Sari Cahyaningtias NRP : 1211 21 28 Jurusan : Matematika Dosen Pembimbing : Subchan, PhD ABSTRAK Pada
PENERAPAN DISTURBANCE COMPENSATING MODEL PREDICTIVE CONTROL (DC-MPC) PADA KENDALI GERAK KAPAL Nama : Sari Cahyaningtias NRP : 1211 21 28 Jurusan : Matematika Dosen Pembimbing : Subchan, PhD ABSTRAK Pada
STUDI EKSPERIMENTAL PENGARUH GAYA GELOMBANG LAUT TERHADAP PEMBANGKITAN GAYA THRUST HYDROFOIL SERI NACA 0012 DAN NACA 0018
 Program Studi MMT-ITS, Surabaya 27 Juli 213 STUDI EKSPERIMENTAL PENGARUH GAYA GELOMBANG LAUT TERHADAP PEMBANGKITAN GAYA THRUST HYDROFOIL SERI NACA 12 DAN NACA 18 Ika Nur Jannah 1*) dan Syahroni Hidayat
Program Studi MMT-ITS, Surabaya 27 Juli 213 STUDI EKSPERIMENTAL PENGARUH GAYA GELOMBANG LAUT TERHADAP PEMBANGKITAN GAYA THRUST HYDROFOIL SERI NACA 12 DAN NACA 18 Ika Nur Jannah 1*) dan Syahroni Hidayat
KONTROL TRACKING PADA QUADROTOR MENGGUNAKAN NONLINEAR QUADRATIC TRACKING DENGAN EXTENDED KALMAN FILTER
 TESIS TE142599 KONTROL TRACKING PADA QUADROTOR MENGGUNAKAN NONLINEAR QUADRATIC TRACKING DENGAN EXTENDED KALMAN FILTER MOHAMMAD NUR 2214 202 008 DOSEN PEMBIMBING Dr. Trihastuti Agustinah, ST.,MT Ir. Rusdhianto
TESIS TE142599 KONTROL TRACKING PADA QUADROTOR MENGGUNAKAN NONLINEAR QUADRATIC TRACKING DENGAN EXTENDED KALMAN FILTER MOHAMMAD NUR 2214 202 008 DOSEN PEMBIMBING Dr. Trihastuti Agustinah, ST.,MT Ir. Rusdhianto
ANALISA DAN SIMULASI MODEL QUATERNION UNTUK KESEIMBANGAN PESAWAT TERBANG
 ANALISA DAN SIMULASI MODEL QUATERNION UNTUK KESEIMBANGAN PESAWAT TERBANG Dosen Pembimbing: Drs. Kamiran, M.Si RIZKI FAUZIAH 1209100028 JURUSAN MATEMATIKA ITS FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
ANALISA DAN SIMULASI MODEL QUATERNION UNTUK KESEIMBANGAN PESAWAT TERBANG Dosen Pembimbing: Drs. Kamiran, M.Si RIZKI FAUZIAH 1209100028 JURUSAN MATEMATIKA ITS FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
Perancangan dan Implementasi Kontroler PID dengan Nonlinear Decoupling pada Sistem Kendali Way-to-Way Point UAV Quadcopter
 JRNAL TEKNIK POMITS Vol. 2, No. 2, (203) ISSN: 2337-3539 (230-927 Print) B-23 Perancangan dan Implementasi Kontroler PID dengan Nonlinear Decoupling pada Sistem Kendali Way-to-Way Point AV Quadcopter Muhammad
JRNAL TEKNIK POMITS Vol. 2, No. 2, (203) ISSN: 2337-3539 (230-927 Print) B-23 Perancangan dan Implementasi Kontroler PID dengan Nonlinear Decoupling pada Sistem Kendali Way-to-Way Point AV Quadcopter Muhammad
BAB 3 DINAMIKA STRUKTUR
 BAB 3 DINAMIKA STRUKTUR Gerakan dari struktur terapung akan dipengaruhi oleh keadaan sekitarnya, dimana terdapat gaya gaya luar yang bekerja pada struktur dan akan menimbulkan gerakan pada struktur. Untuk
BAB 3 DINAMIKA STRUKTUR Gerakan dari struktur terapung akan dipengaruhi oleh keadaan sekitarnya, dimana terdapat gaya gaya luar yang bekerja pada struktur dan akan menimbulkan gerakan pada struktur. Untuk
oleh : Ahmad Nurdian Syah NRP Dosen Pembimbing : Vivien Suphandani Djanali, S.T., ME., Ph.D
 STUDI NUMERIK PENGARUH VARIASI REYNOLDS NUMBER DAN RICHARDSON NUMBER PADA KARAKTERISTIK ALIRAN FLUIDA MELEWATI SILINDER TUNGGAL YANG DIPANASKAN (HEATED CYLINDER) oleh : Ahmad Nurdian Syah NRP. 2112105028
STUDI NUMERIK PENGARUH VARIASI REYNOLDS NUMBER DAN RICHARDSON NUMBER PADA KARAKTERISTIK ALIRAN FLUIDA MELEWATI SILINDER TUNGGAL YANG DIPANASKAN (HEATED CYLINDER) oleh : Ahmad Nurdian Syah NRP. 2112105028
Perancangan dan Implementasi Kontroler PID Gain Scheduling untuk Gerakan Lateral Way-to-Way Point pada UAVQuadcopter
 JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2337-3539 (2301-9271 Prin B-234 Perancangan dan Implementasi Kontroler PID Gain Scheduling untuk Gerakan Lateral Way-to-Way Point pada UAVQuadcopter Tri
JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2337-3539 (2301-9271 Prin B-234 Perancangan dan Implementasi Kontroler PID Gain Scheduling untuk Gerakan Lateral Way-to-Way Point pada UAVQuadcopter Tri
Estimasi Parameter pada Model Suku Bunga Cox Ingersoll Ross (CIR) Menggunakan Kalman Filter untuk Menentukan Harga Zero Coupon Bond
 Menggunakan Kalman Filter untuk Menentukan Harga Zero Coupon Bond") JURNAL SAINS DAN SENI ITS Vol. 4, No.2, (2015) 2337-3520 (2301-928X Print) A-55 Estimasi Parameter pada Model Suku Bunga Cox Ingersoll Ross (CIR) Menggunakan Kalman Filter untuk Menentukan Harga Zero Coupon
JURNAL SAINS DAN SENI ITS Vol. 4, No.2, (2015) 2337-3520 (2301-928X Print) A-55 Estimasi Parameter pada Model Suku Bunga Cox Ingersoll Ross (CIR) Menggunakan Kalman Filter untuk Menentukan Harga Zero Coupon
STUDI PERANCANGAN ROV (REMOTELY OPERATED VEHICLE) UNTUK MENINGKATKAN KEMAMPUAN MANEUVERING DI BAWAH LAUT DENGAN PENDEKATAN CFD
 UNTUK MENINGKATKAN KEMAMPUAN MANEUVERING DI BAWAH LAUT DENGAN PENDEKATAN CFD") STUDI PERANCANGAN ROV (REMOTELY OPERATED VEHICLE) UNTUK MENINGKATKAN KEMAMPUAN MANEUVERING DI BAWAH LAUT DENGAN PENDEKATAN CFD Sinta Windy Asmara Abstrak ROV yang dioperasikan diperairan Indonesia untuk
STUDI PERANCANGAN ROV (REMOTELY OPERATED VEHICLE) UNTUK MENINGKATKAN KEMAMPUAN MANEUVERING DI BAWAH LAUT DENGAN PENDEKATAN CFD Sinta Windy Asmara Abstrak ROV yang dioperasikan diperairan Indonesia untuk
Analisa Kestabilan Sistem dalam Penelitian ini di lakukan dengan dua Metode Yaitu:
 Analisa Kestabilan Sistem dalam Penelitian ini di lakukan dengan dua Metode Yaitu: o Analisa Stabilitas Routh Hurwith 1. Suatu metode menentukan kestabilan sistem dengan melihat pole-pole loop tertutup
Analisa Kestabilan Sistem dalam Penelitian ini di lakukan dengan dua Metode Yaitu: o Analisa Stabilitas Routh Hurwith 1. Suatu metode menentukan kestabilan sistem dengan melihat pole-pole loop tertutup
Estimasi Harga Saham Dengan Implementasi Metode Kalman Filter
 Estimasi Harga Saham Dengan Implementasi Metode Kalman Filter eguh Herlambang 1, Denis Fidita 2, Puspandam Katias 2 1 Program Studi Sistem Informasi Universitas Nahdlatul Ulama Surabaya Unusa Kampus B
Estimasi Harga Saham Dengan Implementasi Metode Kalman Filter eguh Herlambang 1, Denis Fidita 2, Puspandam Katias 2 1 Program Studi Sistem Informasi Universitas Nahdlatul Ulama Surabaya Unusa Kampus B
JURNAL TEKNIK PERKAPALAN Jurnal Hasil Karya Ilmiah Lulusan S1 Teknik Perkapalan Universitas Diponegoro
 http://ejournal3.undip.ac.id/index.php/naval JURNAL TEKNIK PERKAPALAN Jurnal Hasil Karya Ilmiah Lulusan S Teknik Perkapalan Universitas Diponegoro ISSN 2338-322 Analisa Pengaruh Kedalaman, Arus, Serta
http://ejournal3.undip.ac.id/index.php/naval JURNAL TEKNIK PERKAPALAN Jurnal Hasil Karya Ilmiah Lulusan S Teknik Perkapalan Universitas Diponegoro ISSN 2338-322 Analisa Pengaruh Kedalaman, Arus, Serta
Lampiran. Defenisi dan persamaan untuk penurunan kestabilan longitudinal. Simbol Defenisi Origin Persamaan Harga Khas C. Variasi dari hambatan (drag)
") Lampiran Tabel 1 Defenisi dan persamaan untuk penurunan kestabilan longitudinal Simbol Defenisi Origin Persamaan Harga Khas C x u U F Variasi dari hambatan (drag) x C -0.05 D Sq u dan dorongan terhadap
Lampiran Tabel 1 Defenisi dan persamaan untuk penurunan kestabilan longitudinal Simbol Defenisi Origin Persamaan Harga Khas C x u U F Variasi dari hambatan (drag) x C -0.05 D Sq u dan dorongan terhadap
UNIVERSITAS BINA NUSANTARA SIMULASI KINEMATIKA LENGAN ROBOT INDUSTRI DENGAN 6 DERAJAT KEBEBASAN
 UNIVERSITAS BINA NUSANTARA Jurusan Sistem Komputer Skripsi Sarjana Komputer Semester Genap tahun 2003/2004 SIMULASI KINEMATIKA LENGAN ROBOT INDUSTRI DENGAN 6 DERAJAT KEBEBASAN Andy Rosady 0400530056 Riza
UNIVERSITAS BINA NUSANTARA Jurusan Sistem Komputer Skripsi Sarjana Komputer Semester Genap tahun 2003/2004 SIMULASI KINEMATIKA LENGAN ROBOT INDUSTRI DENGAN 6 DERAJAT KEBEBASAN Andy Rosady 0400530056 Riza
Analisis Sloshing 2D pada Dinding Tangki Tipe Membran Kapal LNG Akibat Gerakan Rolling di Gelombang Regular
 G8 Analisis Sloshing 2D pada Dinding Tangki Tipe Membran Kapal LNG Akibat Gerakan Rolling di Gelombang Regular Ericson Estrada Sipayung, I Ketut Suastika, Aries Sulisetyono Jurusan Teknik Perkapalan, Fakultas
G8 Analisis Sloshing 2D pada Dinding Tangki Tipe Membran Kapal LNG Akibat Gerakan Rolling di Gelombang Regular Ericson Estrada Sipayung, I Ketut Suastika, Aries Sulisetyono Jurusan Teknik Perkapalan, Fakultas
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Robot merupakan sebuah alat yang berfungsi untuk membantu manusia dalam melaksanakan tugas-tugasnya. Banyak model robot yang dikembangkan oleh para peneliti,
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Robot merupakan sebuah alat yang berfungsi untuk membantu manusia dalam melaksanakan tugas-tugasnya. Banyak model robot yang dikembangkan oleh para peneliti,
Komparasi Sistem Kontrol Satelit (ADCS) dengan Metode Kontrol PID dan Sliding-PID NUR IMROATUL UST ( )
 dengan Metode Kontrol PID dan Sliding-PID NUR IMROATUL UST ( )") Komparasi Sistem Kontrol Satelit (ADCS) dengan Metode Kontrol PID dan Sliding-PID NUR IMROATUL UST (218 1 165) Latar Belakang Indonesia memiliki bentangan wilayah yang luas. Satelit tersusun atas beberapa
Komparasi Sistem Kontrol Satelit (ADCS) dengan Metode Kontrol PID dan Sliding-PID NUR IMROATUL UST (218 1 165) Latar Belakang Indonesia memiliki bentangan wilayah yang luas. Satelit tersusun atas beberapa
Komparasi Bentuk Daun Kemudi terhadap Gaya Belok dengan Pendekatan CFD
 JURNAL TEKNIK ITS Vol. 1, (Sept, 2012) ISSN: 2301-9271 G-104 Komparasi Bentuk Daun Kemudi terhadap Gaya Belok dengan Pendekatan CFD Prima Ihda Kusuma Wardana, I Ketut Aria Pria Utama Jurusan Teknik Perkapalan,
JURNAL TEKNIK ITS Vol. 1, (Sept, 2012) ISSN: 2301-9271 G-104 Komparasi Bentuk Daun Kemudi terhadap Gaya Belok dengan Pendekatan CFD Prima Ihda Kusuma Wardana, I Ketut Aria Pria Utama Jurusan Teknik Perkapalan,
PERANCANGAN SISTEM KONTROL SANDAR KAPAL OTOMATIS BERBASIS LOGIKA FUZZY DI PELABUHAN TANJUNG PERAK SURABAYA
 PERANCANGAN SISTEM KONTROL SANDAR KAPAL OTOMATIS BERBASIS LOGIKA FUZZY DI PELABUHAN TANJUNG PERAK SURABAYA Oleh : Randika Gunawan 2409100070 Dosen Pembimbing: Dr. Ir. Aulia Siti Aisjah, MT NIP. 196601161989032001
PERANCANGAN SISTEM KONTROL SANDAR KAPAL OTOMATIS BERBASIS LOGIKA FUZZY DI PELABUHAN TANJUNG PERAK SURABAYA Oleh : Randika Gunawan 2409100070 Dosen Pembimbing: Dr. Ir. Aulia Siti Aisjah, MT NIP. 196601161989032001
BAB II DASAR TEORI. Gambar 2.1. Letak CoM dan poros putar robot pada sumbu kartesian.
 BAB II DASAR TEORI Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem yang dirancang. Teori-teori yang digunakan dalam realisasi skripsi ini antara
BAB II DASAR TEORI Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem yang dirancang. Teori-teori yang digunakan dalam realisasi skripsi ini antara
terhadap gravitasi, sehingga vektor gravitasi dapat diestimasi dan didapatkan dari pengukuran. Hasil akselerasi lalu diintregasikan untuk mendapatkan
 1 BAB I PENDAHULUAN 1.1. Latar Belakang Penelitian Pada kurun waktu yang singkat, Unmanned Aerial Vehicle (UAV) telah menarik banyak perhatian warga sipil, karena keunggulan mesin ini yang dapat berfungsi
1 BAB I PENDAHULUAN 1.1. Latar Belakang Penelitian Pada kurun waktu yang singkat, Unmanned Aerial Vehicle (UAV) telah menarik banyak perhatian warga sipil, karena keunggulan mesin ini yang dapat berfungsi
UNIVERSITAS INDONESIA PERANCANGAN DAN SIMULASI PENGENDALIAN SISTEM GERAK ROTASI QUADROTOR MENGGUNAKAN QUADRATIC GAUSSIAN (LQG) TESIS
 TESIS") UNIVERSITAS INDONESIA PERANCANGAN DAN SIMULASI PENGENDALIAN SISTEM GERAK ROTASI QUADROTOR MENGGUNAKAN LINEAR QUADRATIC GAUSSIAN (LQG) TESIS SUPRIYONO 8642475 FAKULTAS TEKNIK PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS INDONESIA PERANCANGAN DAN SIMULASI PENGENDALIAN SISTEM GERAK ROTASI QUADROTOR MENGGUNAKAN LINEAR QUADRATIC GAUSSIAN (LQG) TESIS SUPRIYONO 8642475 FAKULTAS TEKNIK PROGRAM STUDI TEKNIK ELEKTRO
Rancang Bangun Prototype Unmanned Aerial Vehicle (UAV) dengan Tiga Rotor
 dengan Tiga Rotor") JURNAL TEKNIK POMITS Vol, No 1, (1) ISSN: 7-59 (1-971 Print) B-47 Rancang Bangun Prototype Unmanned Aerial Vehicle (UAV) dengan Tiga Rotor Darmawan Rasyid Hadi Saputra dan Bambang Pramujati Jurusan Teknik
JURNAL TEKNIK POMITS Vol, No 1, (1) ISSN: 7-59 (1-971 Print) B-47 Rancang Bangun Prototype Unmanned Aerial Vehicle (UAV) dengan Tiga Rotor Darmawan Rasyid Hadi Saputra dan Bambang Pramujati Jurusan Teknik
Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR
 Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR 2105100166 PENDAHULUAN LATAR BELAKANG Control system : keluaran (output) dari sistem sesuai dengan referensi yang diinginkan Non linear
Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR 2105100166 PENDAHULUAN LATAR BELAKANG Control system : keluaran (output) dari sistem sesuai dengan referensi yang diinginkan Non linear
Kontrol PIDLongitudinalDisplacement AutopilotMissiledengan Simulink
 Kontrol PIDLongitudinalDisplacement AutopilotMissiledengan Simulink M. Amirullah Akbar, Munadi Lab. Komputasi dan Otomasi, Jurusan Teknik Mesin, Universitas Diponegoro Amir240891@gmail.com, munadi@undip.ac.id
Kontrol PIDLongitudinalDisplacement AutopilotMissiledengan Simulink M. Amirullah Akbar, Munadi Lab. Komputasi dan Otomasi, Jurusan Teknik Mesin, Universitas Diponegoro Amir240891@gmail.com, munadi@undip.ac.id
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI BAB II LANDASAN TEORI 2.1. Sistem Kendali Lup[1] Sistem kendali dapat dikatakan sebagai hubungan antara komponen yang membentuk sebuah konfigurasi sistem, yang akan menghasilkan
BAB II LANDASAN TEORI BAB II LANDASAN TEORI 2.1. Sistem Kendali Lup[1] Sistem kendali dapat dikatakan sebagai hubungan antara komponen yang membentuk sebuah konfigurasi sistem, yang akan menghasilkan
PEMODELAN DAN ANALISA GETARAN MOTOR BENSIN 4 LANGKAH 2 SILINDER 650CC SEGARIS DENGAN SUDUT ENGKOL 90 UNTUK RUBBER MOUNT
 JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1 PEMODELAN DAN ANALISA GETARAN MOTOR BENSIN 4 LANGKAH 2 SILINDER 650CC SEGARIS DENGAN SUDUT ENGKOL 90 UNTUK RUBBER MOUNT Siti Nafaati dan Harus
JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1 PEMODELAN DAN ANALISA GETARAN MOTOR BENSIN 4 LANGKAH 2 SILINDER 650CC SEGARIS DENGAN SUDUT ENGKOL 90 UNTUK RUBBER MOUNT Siti Nafaati dan Harus
ANALISA GERAKAN SEAKEEPING KAPAL PADA GELOMBANG REGULER
 ANALISA GERAKAN SEAKEEPING KAPAL PADA GELOMBANG REGULER Parlindungan Manik Program Studi Teknik Perkapalan, Fakultas Teknik, Universitas Diponegoro ABSTRAK Ada enam macam gerakan kapal dilaut yaitu tiga
ANALISA GERAKAN SEAKEEPING KAPAL PADA GELOMBANG REGULER Parlindungan Manik Program Studi Teknik Perkapalan, Fakultas Teknik, Universitas Diponegoro ABSTRAK Ada enam macam gerakan kapal dilaut yaitu tiga
ANALISIS DAN SIMULASI PENGENDALI ROBOT POLAR DERAJAT KEBEBASAN DUA MENGGUNAKAN SLIDING MODE CONTROL (SMC)
") ANALISIS DAN SIMULASI PENGENDALI ROBOT POLAR DERAJAT KEBEBASAN DUA MENGGUNAKAN SLIDING MODE CONTROL (SMC) Pembimbing : Subchan, M.Sc. Ph.D. Drs. Kamiran, M.Si. NASHRUL MILLAH-0800707 Jurusan Matematika
ANALISIS DAN SIMULASI PENGENDALI ROBOT POLAR DERAJAT KEBEBASAN DUA MENGGUNAKAN SLIDING MODE CONTROL (SMC) Pembimbing : Subchan, M.Sc. Ph.D. Drs. Kamiran, M.Si. NASHRUL MILLAH-0800707 Jurusan Matematika
Desain Kendali pada Sistem Steam Drum Boiler dengan Memperhitungkan Control Valve
 Desain Kendali pada Sistem Steam Drum Boiler dengan Memperhitungkan Control Valve ROFIKA NUR AINI 1206 100 017 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
Desain Kendali pada Sistem Steam Drum Boiler dengan Memperhitungkan Control Valve ROFIKA NUR AINI 1206 100 017 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
BAB III DATA KENDARAAN UNTUK SIMULASI
 BAB III DATA KENDARAAN UNTUK SIMULASI 3.1. Tinjauan Pemodelan truk secara lengkap dikembangkan dan bertujuan untuk mempelajari efektivitas dari sistem Antilock Braking System termasuk pemodelan dinamika
BAB III DATA KENDARAAN UNTUK SIMULASI 3.1. Tinjauan Pemodelan truk secara lengkap dikembangkan dan bertujuan untuk mempelajari efektivitas dari sistem Antilock Braking System termasuk pemodelan dinamika
Seminar Nasional Sains dan Teknologi Terapan IV 2016 ISBN Institut Teknologi Adhi Tama Surabaya
 SIMULASI DESAIN GEOMETRI DENGAN METODE CFD UNTUK MENDAPATKAN NILAI PUSAT MASSA DAN HIDRODINAMIK KOEFISIEN PADA AUTONOMOUS UNDERWATER VEHICLE (AUV) SEGOROGENI Hendro Nurhadi, Dedy Zulhidayat Noor, Heru
SIMULASI DESAIN GEOMETRI DENGAN METODE CFD UNTUK MENDAPATKAN NILAI PUSAT MASSA DAN HIDRODINAMIK KOEFISIEN PADA AUTONOMOUS UNDERWATER VEHICLE (AUV) SEGOROGENI Hendro Nurhadi, Dedy Zulhidayat Noor, Heru
PERANCANGAN SISTEM KONTROL LOGIKA FUZZY PADA MANUVER NONLINIER KAPAL PERANG KELAS SIGMA (EXTENDED)
") JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) G-144 PERANCANGAN SISTEM KONTROL LOGIKA FUZZY PADA MANUVER NONLINIER KAPAL PERANG KELAS SIGMA (EXTENDED) Dandy Haris Firdianda,
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) G-144 PERANCANGAN SISTEM KONTROL LOGIKA FUZZY PADA MANUVER NONLINIER KAPAL PERANG KELAS SIGMA (EXTENDED) Dandy Haris Firdianda,
BAB III ANALISA DINAMIK DAN PEMODELAN SIMULINK CONNECTING ROD
 BAB III ANALISA DINAMIK DAN PEMODELAN SIMULINK CONNECTING ROD Dalam tugas akhir ini, peneliti melakukan analisa dinamik connecting rod. Geometri connecting rod sepeda motor yang dianalisis berdasarkan
BAB III ANALISA DINAMIK DAN PEMODELAN SIMULINK CONNECTING ROD Dalam tugas akhir ini, peneliti melakukan analisa dinamik connecting rod. Geometri connecting rod sepeda motor yang dianalisis berdasarkan
STUDI NUMERIK : MODIFIKASI BODI NOGOGENI PROTOTYPE PROJECT GUNA MEREDUKSI GAYA HAMBAT
 STUDI NUMERIK : MODIFIKASI BODI NOGOGENI PROTOTYPE PROJECT GUNA MEREDUKSI GAYA HAMBAT GLADHI DWI SAPUTRA 2111 030 013 DOSEN PEMBIMBING DEDY ZULHIDAYAT NOOR, ST, MT, PhD PROGRAM STUDI DIPLOMA III TEKNIK
STUDI NUMERIK : MODIFIKASI BODI NOGOGENI PROTOTYPE PROJECT GUNA MEREDUKSI GAYA HAMBAT GLADHI DWI SAPUTRA 2111 030 013 DOSEN PEMBIMBING DEDY ZULHIDAYAT NOOR, ST, MT, PhD PROGRAM STUDI DIPLOMA III TEKNIK
Pemodelan dan Analisis Simulator Gempa Penghasil Gerak Translasi
 JURNAL TEKNIK ITS Vol. 6, No. 1, (2015) ISSN: 2337-3539 (2301-9271 Print) F 164 Pemodelan dan Analisis Simulator Gempa Penghasil Gerak Translasi Tiara Angelita Cahyaningrum dan Harus Laksana Guntur Laboratorium
JURNAL TEKNIK ITS Vol. 6, No. 1, (2015) ISSN: 2337-3539 (2301-9271 Print) F 164 Pemodelan dan Analisis Simulator Gempa Penghasil Gerak Translasi Tiara Angelita Cahyaningrum dan Harus Laksana Guntur Laboratorium
ANALISA KEKUATAN CRANKSHAFT DUA-SILINDER KAPASITAS 650 CC DENGAN MENGGUNAKAN METODE ELEMEN HINGGA
 JURUSAN TEKNIK MESIN FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SIDANG TUGAS AKHIR: ANALISA KEKUATAN CRANKSHAFT DUA-SILINDER KAPASITAS 650 CC DENGAN MENGGUNAKAN METODE ELEMEN HINGGA
JURUSAN TEKNIK MESIN FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SIDANG TUGAS AKHIR: ANALISA KEKUATAN CRANKSHAFT DUA-SILINDER KAPASITAS 650 CC DENGAN MENGGUNAKAN METODE ELEMEN HINGGA
Desain Kontrol Tracking Underactuated Autonomous Underwater Vehicle (AUV) dengan Pengaruh Gangguan Arus Laut
 dengan Pengaruh Gangguan Arus Laut") Desain Kontrol Tracking Underactuated Autonomous Underwater Vehicle (AUV) dengan Pengaruh Gangguan Arus Laut Tracking Control Design of Underactuated Autonomous Underwater Vehicle (AUV) Under Ocean Current
Desain Kontrol Tracking Underactuated Autonomous Underwater Vehicle (AUV) dengan Pengaruh Gangguan Arus Laut Tracking Control Design of Underactuated Autonomous Underwater Vehicle (AUV) Under Ocean Current
IDENTIFIKASI MODEL PADA QUADROTOR DENGAN METODE ESTIMASI PARAMETER RELS
 IDENTIFIKASI MODEL PADA QUADROTOR DENGAN METODE ESTIMASI PARAMETER RELS Bayu Gigih Prasetyo *), Aris Triwiyatno, and Budi Setiyono Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto,
IDENTIFIKASI MODEL PADA QUADROTOR DENGAN METODE ESTIMASI PARAMETER RELS Bayu Gigih Prasetyo *), Aris Triwiyatno, and Budi Setiyono Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto,
ABSTRAK. Inverted Pendulum, Proporsional Integral Derivative, Simulink Matlab. Kata kunci:
 PROJECT OF AN INTELLIGENT DIFFERENTIALY DRIVEN TWO WHEELS PERSONAL VEHICLE (ID2TWV) SUBTITLE MODELING AND EXPERIMENT OF ID2TWV BASED ON AN INVERTED PENDULUM MODEL USING MATLAB SIMULINK Febry C.N*, EndraPitowarno**
PROJECT OF AN INTELLIGENT DIFFERENTIALY DRIVEN TWO WHEELS PERSONAL VEHICLE (ID2TWV) SUBTITLE MODELING AND EXPERIMENT OF ID2TWV BASED ON AN INVERTED PENDULUM MODEL USING MATLAB SIMULINK Febry C.N*, EndraPitowarno**
WAKTU OPTIMUM PADA PELURU KENDALI DENGAN MANUVER AKHIR MENGHUNJAM VERTIKAL. Sari Cahyaningtias Dosen Pembimbing: Subchan, Ph.
 WAKTU OPTIMUM PADA PELURU KENDALI DENGAN MANUVER AKHIR MENGHUNJAM VERTIKAL Sari Cahyaningtias 1207 100 046 Dosen Pembimbing: Subchan, Ph.D Abstrak Peluru kendali adalah senjata berpanduan dan didesain
WAKTU OPTIMUM PADA PELURU KENDALI DENGAN MANUVER AKHIR MENGHUNJAM VERTIKAL Sari Cahyaningtias 1207 100 046 Dosen Pembimbing: Subchan, Ph.D Abstrak Peluru kendali adalah senjata berpanduan dan didesain
BAB 3 PERANCANGAN KONTROL DENGAN PID TUNING
 8 BAB 3 PERANCANGAN KONTROL DENGAN PID TUNING 3. Algoritma Kontrol Pada Pesawat Tanpa Awak Pada makalah seminar dari penulis dengan judul Pemodelan dan Simulasi Gerak Sirip Pada Pesawat Tanpa Awak telah
8 BAB 3 PERANCANGAN KONTROL DENGAN PID TUNING 3. Algoritma Kontrol Pada Pesawat Tanpa Awak Pada makalah seminar dari penulis dengan judul Pemodelan dan Simulasi Gerak Sirip Pada Pesawat Tanpa Awak telah
PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni
 Oleh : Ika Evi Anggraeni") PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni 206 00 03 Dosen Pembimbing : Dr. Erna Apriliani, M.Si Hendra Cordova, ST,
PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni 206 00 03 Dosen Pembimbing : Dr. Erna Apriliani, M.Si Hendra Cordova, ST,
ANALISIS GERAKAN SWAY, HEAVE, DAN ROLL PADA OFFSHORE PLATFORM MENGGUNAKAN METODE KONTROL OPTIMAL LINEAR QUADRATIC REGULATOR
 JURNAL TEKNIK POMITS Vol. 2, No., (24) ISSN: 2337-3539 (23-927 Print) ANALISIS GERAKAN SWAY, HEAVE, DAN ROLL PADA OFFSHORE PLATFORM MENGGUNAKAN METODE KONTROL OPTIMAL LINEAR QUADRATIC REGULATOR Muhammad
JURNAL TEKNIK POMITS Vol. 2, No., (24) ISSN: 2337-3539 (23-927 Print) ANALISIS GERAKAN SWAY, HEAVE, DAN ROLL PADA OFFSHORE PLATFORM MENGGUNAKAN METODE KONTROL OPTIMAL LINEAR QUADRATIC REGULATOR Muhammad
ESTIMASI VARIABEL KEADAAN PADA NON- ISOTHERMAL CONTINUOUS STIRRED TANK REACTOR MENGGUNAKAN FUZZY KALMAN FILTER
 TESIS - SM 142501 ESTIMASI VARIABEL KEADAAN PADA NON- ISOTHERMAL CONTINUOUS STIRRED TANK REACTOR MENGGUNAKAN FUZZY KALMAN FILTER RISA FITRIA NRP 1211201202 DOSEN PEMBIMBING Dr. Didik Khusnul Arif, S.Si,
TESIS - SM 142501 ESTIMASI VARIABEL KEADAAN PADA NON- ISOTHERMAL CONTINUOUS STIRRED TANK REACTOR MENGGUNAKAN FUZZY KALMAN FILTER RISA FITRIA NRP 1211201202 DOSEN PEMBIMBING Dr. Didik Khusnul Arif, S.Si,
SIMULASI GERAK WAHANA PELUNCUR POLYOT
 BAB SIMULASI GERAK WAHANA PELUNCUR POLYOT. Pendahuluan Simulasi gerak wahana peluncur Polyot dilakukan dengan menggunakan perangkat lunak Simulink Matlab 7.. Dalam simulasi gerak ini dimodelkan gerak roket
BAB SIMULASI GERAK WAHANA PELUNCUR POLYOT. Pendahuluan Simulasi gerak wahana peluncur Polyot dilakukan dengan menggunakan perangkat lunak Simulink Matlab 7.. Dalam simulasi gerak ini dimodelkan gerak roket
DINAMIKA KAPAL. SEA KEEPING Kemampuan unjuk kerja kapal dalam menghadapi gangguan-gangguan disaat beroperasi di laut
 DINAMIKA KAPAL Istilah-istilah penting dalam dinamika kapal : Seakeeping Unjuk kerja kapal pada saat beroperasi di laut Manouveribility Kemampuan kapal untuk mempertahankan posisinya dibawah kendali operator
DINAMIKA KAPAL Istilah-istilah penting dalam dinamika kapal : Seakeeping Unjuk kerja kapal pada saat beroperasi di laut Manouveribility Kemampuan kapal untuk mempertahankan posisinya dibawah kendali operator
Perbandingan Kontrol Manuver dan Pendaratan Quadrotor dengan PID, Gain Scheduling, dan PID Sinyal Kontrol Termodifikasi
 Perbandingan Kontrol Manuver dan Pendaratan Quadrotor dengan PD, Gain Scheduling, dan PD Sinyal Kontrol Termodifikasi mmanuel N. Ricardo, Katjuk Astrowulan, Eka skandar Jurusan Teknik Elektro, Fakultas
Perbandingan Kontrol Manuver dan Pendaratan Quadrotor dengan PD, Gain Scheduling, dan PD Sinyal Kontrol Termodifikasi mmanuel N. Ricardo, Katjuk Astrowulan, Eka skandar Jurusan Teknik Elektro, Fakultas
Prediksi Gerak Terhadap Desain Awal Ferry 600, 500 dan 300 GRT Untuk Pelayaran Antar Pulau
 Jurnal Wave, UPT. BPPH BPPT Vol. 3, No., 9 Prediksi Gerak Terhadap Desain Awal Ferry 6, 5 dan 3 GRT Untuk Pelayaran Antar Pulau Baharuddin Ali 1, Cahyadi Sugeng Jati Mintarso 1 Abstrak Kapal ferry merupakan
Jurnal Wave, UPT. BPPH BPPT Vol. 3, No., 9 Prediksi Gerak Terhadap Desain Awal Ferry 6, 5 dan 3 GRT Untuk Pelayaran Antar Pulau Baharuddin Ali 1, Cahyadi Sugeng Jati Mintarso 1 Abstrak Kapal ferry merupakan
Perancangan Sistem Kontrol Trajectory pada Kondisi Gangguan Arus Laut Non Uniform di Ketapang-Gilimanuk
 JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2301-9271 A-201 Perancangan Sistem Kontrol Trajectory pada Kondisi Gangguan Arus Laut Non Uniform di - Anindita Adikaputri Vinaya, Aulia Siti Aisjah,A.A
JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2301-9271 A-201 Perancangan Sistem Kontrol Trajectory pada Kondisi Gangguan Arus Laut Non Uniform di - Anindita Adikaputri Vinaya, Aulia Siti Aisjah,A.A
IDENTIFIKASI MODEL PADA QUADROTOR DENGAN METODE ESTIMASI PARAMETER RELS
 IDENTIFIKASI MODEL PADA QUADROTOR DENGAN METODE ESTIMASI PARAMETER RELS Bayu Gigih Prasetyo *), Aris Triwiyatno, and Budi Setiyono Laboratorium Teknik Kontrol Otomatik, Jurusan Teknik Elektro, Fakultas
IDENTIFIKASI MODEL PADA QUADROTOR DENGAN METODE ESTIMASI PARAMETER RELS Bayu Gigih Prasetyo *), Aris Triwiyatno, and Budi Setiyono Laboratorium Teknik Kontrol Otomatik, Jurusan Teknik Elektro, Fakultas
DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY
 DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY Reza Dwi Imami *), Aris Triwiyatno, and Sumardi Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus
DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY Reza Dwi Imami *), Aris Triwiyatno, and Sumardi Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus
Penelitian Numerik Turbin Angin Darrieus dengan Variasi Jumlah Sudu dan Kecepatan Angin
 JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2337-3539 (2301-9271 Print) B-13 Penelitian Numerik Turbin Angin Darrieus dengan Variasi Jumlah Sudu dan Kecepatan Angin Rahmat Taufiqurrahman dan Vivien Suphandani
JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2337-3539 (2301-9271 Print) B-13 Penelitian Numerik Turbin Angin Darrieus dengan Variasi Jumlah Sudu dan Kecepatan Angin Rahmat Taufiqurrahman dan Vivien Suphandani
ESTIMASI TRAJECTORY MOBILE ROBOT MENGGUNAKAN METODE ENSEMBLE KALMAN FILTER SQUARE ROOT (ENKF-SR)
") SEMINAR NASIONAL PASCASARJANA SAL ESIMASI RAJECORY MOBILE ROBO MENGGUNAKAN MEODE ENSEMBLE KALMAN FILER SQUARE ROO (ENKF-SR) eguh Herlambang Zainatul Mufarrioh Firman Yudianto Program Studi Sistem Informasi
SEMINAR NASIONAL PASCASARJANA SAL ESIMASI RAJECORY MOBILE ROBO MENGGUNAKAN MEODE ENSEMBLE KALMAN FILER SQUARE ROO (ENKF-SR) eguh Herlambang Zainatul Mufarrioh Firman Yudianto Program Studi Sistem Informasi
STABILISASI GERAKAN KAMERA MENGGUNAKAN KALMAN FILTER SKRIPSI
 STABILISASI GERAKAN KAMERA MENGGUNAKAN KALMAN FILTER SKRIPSI Diajukan Untuk Memenuhi Salah Satu Persyaratan Akademik dalam Menyelesaikan Program Sarjana (S-1) Teknik Disusun Oleh: RENI JUANETTA NIM : 201110130311053
STABILISASI GERAKAN KAMERA MENGGUNAKAN KALMAN FILTER SKRIPSI Diajukan Untuk Memenuhi Salah Satu Persyaratan Akademik dalam Menyelesaikan Program Sarjana (S-1) Teknik Disusun Oleh: RENI JUANETTA NIM : 201110130311053
PEMANFAATAN TEKNOLOGI DIMPLE PADA LAMBUNG KAPAL UNTUK MENGURANGI TAHANAN KAPAL
 PEMANFAATAN TEKNOLOGI DIMPLE PADA LAMBUNG KAPAL UNTUK MENGURANGI TAHANAN KAPAL Dhani Mishbah Firmanullah 1), M Wahyu Firmansyah 2), Fandhika Putera Santoso 3) Teknik Sistem Perkapalan, Fakultas Teknologi
PEMANFAATAN TEKNOLOGI DIMPLE PADA LAMBUNG KAPAL UNTUK MENGURANGI TAHANAN KAPAL Dhani Mishbah Firmanullah 1), M Wahyu Firmansyah 2), Fandhika Putera Santoso 3) Teknik Sistem Perkapalan, Fakultas Teknologi
PERANCANGAN SISTEM KENDALI MODEL FOLLOWING DINAMIKA GERAK LONGITUDINAL PADA IN-FLIGHT SIMULATOR N250-PA1 DENGAN METODE KENDALI OPTIMAL KUADRAT LINIER
 PERANCANGAN SISTEM KENDALI MODEL FOLLOWING DINAMIKA GERAK LONGITUDINAL PADA IN-FLIGHT SIMULATOR N250-PA1 DENGAN METODE KENDALI OPTIMAL KUADRAT LINIER Skripsi Untuk memenuhi sebagian persyaratan mencapai
PERANCANGAN SISTEM KENDALI MODEL FOLLOWING DINAMIKA GERAK LONGITUDINAL PADA IN-FLIGHT SIMULATOR N250-PA1 DENGAN METODE KENDALI OPTIMAL KUADRAT LINIER Skripsi Untuk memenuhi sebagian persyaratan mencapai
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID OPTIMAL UNTUK TRACKING LINTASAN GERAKAN LATERAL PADA UAV (UNMANNED AERIAL VEHICLE)
") PERANCANGAN DAN IMPLEMENTASI KONTROLER PID OPTIMAL UNTUK TRACKING LINTASAN GERAKAN LATERAL PADA UAV (UNMANNED AERIAL VEHICLE) Rahmat Fauzi - 0906077 Jurusan Teknik Elektro-FTI, Institut Teknologi Sepuluh
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID OPTIMAL UNTUK TRACKING LINTASAN GERAKAN LATERAL PADA UAV (UNMANNED AERIAL VEHICLE) Rahmat Fauzi - 0906077 Jurusan Teknik Elektro-FTI, Institut Teknologi Sepuluh
APLIKASI METODE ENSEMBLE KALMAN FILTER (ENKF) PADA MODEL PENURUNAN PRODUKSI SUMUR PANAS BUMI
 PADA MODEL PENURUNAN PRODUKSI SUMUR PANAS BUMI") APLIKASI METODE ENSEMBLE KALMAN FILTER (ENKF) PADA MODEL PENURUNAN PRODUKSI SUMUR PANAS BUMI Robi Irsamukhti dan Nurita Putri Hardiani Program Studi Magister Terapan Teknik Panas Bumi Institut Teknologi
APLIKASI METODE ENSEMBLE KALMAN FILTER (ENKF) PADA MODEL PENURUNAN PRODUKSI SUMUR PANAS BUMI Robi Irsamukhti dan Nurita Putri Hardiani Program Studi Magister Terapan Teknik Panas Bumi Institut Teknologi
BAB I PENDAHULUAN. 1 Universitas Internasional Batam
 BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat terbang model UAV (Unmanned Aerial Vehicle) telah berkembang dengan sangat pesat dan menjadi salah satu area penelitian yang diprioritaskan. Beberapa jenis
BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat terbang model UAV (Unmanned Aerial Vehicle) telah berkembang dengan sangat pesat dan menjadi salah satu area penelitian yang diprioritaskan. Beberapa jenis
Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin Speed 3
 JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: 2337-3539 (2301-9271 Print) F-301 Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin
JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: 2337-3539 (2301-9271 Print) F-301 Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin
Pemodelan Sistem Kendali PID pada Quadcopter dengan Metode Euler Lagrange
 IJEIS, Vol.4, No.1, April 2014, pp. 13~24 ISSN: 2088-3714 13 Pemodelan Sistem Kendali PID pada Quadcopter dengan Metode Euler Lagrange Andi Dharmawan 1, Yohana Yulya Simanungkalit* 2, Noorma Yulia Megawati
IJEIS, Vol.4, No.1, April 2014, pp. 13~24 ISSN: 2088-3714 13 Pemodelan Sistem Kendali PID pada Quadcopter dengan Metode Euler Lagrange Andi Dharmawan 1, Yohana Yulya Simanungkalit* 2, Noorma Yulia Megawati
ANALISA DESAIN STRUKTUR DAN KESTABILAN SUSPENSI PASSIVE PADA SMART PERSONAL VEHICLE 2 RODA
 SIDANG TUGAS AKHIR ANALISA DESAIN STRUKTUR DAN KESTABILAN SUSPENSI PASSIVE PADA SMART PERSONAL VEHICLE 2 RODA Disusun oleh Yonathan A. Kapugu (2106100019) Dosen pembimbing Prof. Ir. IN Sutantra, M.Sc.,
SIDANG TUGAS AKHIR ANALISA DESAIN STRUKTUR DAN KESTABILAN SUSPENSI PASSIVE PADA SMART PERSONAL VEHICLE 2 RODA Disusun oleh Yonathan A. Kapugu (2106100019) Dosen pembimbing Prof. Ir. IN Sutantra, M.Sc.,