SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI
|
|
|
- Surya Hermanto
- 6 tahun lalu
- Tontonan:
Transkripsi
1 SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI Jourdan Septiansyah Efflan NRP Dosen Pembimbing Ronny Mardiyanto, ST.,MT.,Ph.D. Ir. Djoko Purwanto,M.Eng.,Ph.D. JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013





2 SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI PAN-TILT CAMERA FOTOGRAFER TRIPOD

3 Latar Belakang







4 Latar Belakang

5 Samsung Auto Tracking speed dome feature
6 Rumusan Masalah Bagaimana image processing pada smartphone Android dapat diimplementasikan pada Pan-Tilt Tripod otomatis ini? Bagaimana algoritma untuk menentukan posisi wajah yang tepat pada kamera ketika ada seseorang dan/atau sekelompok orang yang ingin berfoto? Bagaimana mengintegrasikan antara smartphone Android, motor servo, dan unit pemroses pada Pan-Tilt Tripod otomatis ini?
7 Tujuan Mengembangkan peralatan otomasi sistem di bidang fotografi. Membantu mempermudah pihak / fotografer yang ingin mengambil gambar atau berfoto. Mampu mengimplementasikan pengolahan citra pada sistem operasi Android pada sistem Pan-Tilt Tripod. Mampu membuat algoritma sistem yang dapat menentukan posisi kamera secara tepat ketika ada seseorang, maupun sekelompok orang berfoto.
8 Batasan Masalah Objek Pan-Tilt Tripod adalah wajah manusia dengan tinggi antara 150 hingga 185 cm. Pan-Tilt Tripod diletakkan dalam posisi tertentu ketika dioperasikan. Jarak antara Pan-Tilt Tripod dan objek maksimal adalah 2 meter. Pengambilan foto dilakukan dengan sistem pencahayaan yang mencukupi. Wajah yang dideteksi maksimal adalah 4 orang.
9 Tinjauan Pustaka(Face Tracking with a Pan/Tilt Servo Bracket)

10 Perancangan Sistem Pan-Tilt Tripod Smartphone Android Kamera Speaker Shield Pan-Tilt Tripod dan Motor Servo Display UI(Touch Sensor) PROSESOR ARMv7 DUAL-CORE 1,55 Ghz SCORPION Bluetooth USB Modul Bluetooth HC- 05 PROSESOR ARDUINO AT MEGA2560 RAM SD/MMC Motor Servo Pan Motor Servo Tilt
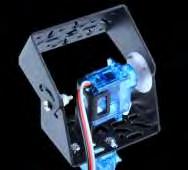
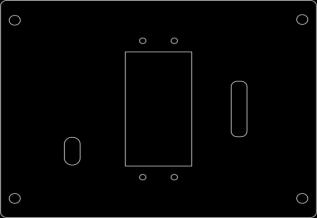
11 Perancangan Hardware Dudukan Pan-Tilt Tripod Shield Arduino Pan-Tilt Tripod

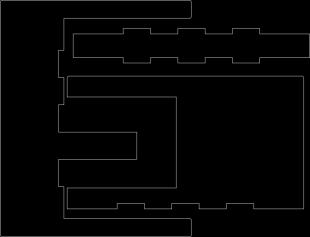
12 Dudukan Pan-Tilt Tripod
13 Shield Arduino Pan-Tilt Tripod



14 Perancangan Software Aplikasi Pan-Tilt Tripod pada Android Software Arduino Pan-Tilt Tripod
15 Software Arduino Pan-Tilt Tripod No Karakter Perintah. ASCII 1 a Servo pan bergerak ke kiri 2 d Servo pan bergerak ke kanan 3 x Servo pan berhenti 4 w Servo tilt bergerak ke atas 5 s Servo tilt bergerak ke bawah 6 z Servo tilt berhenti 7 0 Delay 55 ms 8 1 Delay 50 ms 9 2 Delay 45 ms 10 3 Delay 40 ms 11 4 Delay 35 ms 12 5 Delay 30 ms 14 6 Delay 25 ms 15 7 Delay 20 ms 16 8 Delay 15 ms 17 9 Delay 10 ms
16 Software Aplikasi Pan-Tilt Tripod Start Pairing Bluetooth Deteksi Wajah pada Smartphone Android T Wajah Terdeteksi Y Motor Servo Bergerak Kontroler PID 1. Pairing Bluetooth 2. Deteksi Wajah 3. Pergerakan Motor Servo 4. Kontroler PID 5. Ambil Gambar T Siap Ambil Gambar Y Ambil Gambar Stop Y Berhenti T
17 Pergerakan Motor Servo
18 Kontroler PID Kontroler P + Setpoint - Error Kontroler I Kontroler D Proses Pengaturan Kecepatan Pada Motor Servo Output (Posisi Wajah Saat Ini) PID = Kp x Error + Ki x Integral Error + Kd Deferensial Error Integral Error = Integral Error + (Error x dt) Deferensial Error = (Error Error n 1 )/dt Nilai PID Kecepatan = Nilai PID Maks x9 Nilai PID Max = Kp x (Resolusi sumbu X x koordinat titik tengah sumbu X )
19 Pergerakan Setelah Implementasi Kontroler PID sumbu PAN




20 Pergerakan Setelah Implementasi Kontroler PID sumbu PAN dan TILT
21 Pengambilan Gambar s = x i x Dimana : x = Rata-rata koordinat wajah selama 10 iterasi s = Simpangan x i = Koordinat saat ini
22 PENGUJIAN SISTEM Meliputi : FPS(frame per second) test Tuning PID test Rise Time, Overshoot, Steady State, dan Settling Time test Velocity (face tracking) test
23 FPS test Rata-rata FPS = 17,22 FPS 17 FPS 17 FPS = 58 ms
24 Tuning PID test Pada sisi Pan, didapatkan hasil tuning manual sebagai berikut : Kp = 0.1 Ki = 0.01 Kd = Sedangkan tuning manual pada sisi Tilt didapatkan hasil sebagai berikut : Kp = 0.2 Ki = 0.03 Kd = 0.02
25 Tuning PID PAN
26 Tuning PID TILT
27 Rise Time, Overshoot, Steady State, dan Settling Time test Pengujian ini dimaksudkan agar diketahui bagaimana performa dari dalam kontroler PID dengan analisa parameter yang meliputi rise-time, overshoot, steady-state, dan settling time dari nilai Kp, Ki, dan Kd yang telah dipilih untuk mengontrol pergerakan motor servo yang telah dipilih sebelumnya. Dilakukan pengambilan grafik secara terpisah untuk sumbu Pan, dan untuk sumbu Tilt dengan cara kontroler yang sedang mengikuti posisi wajah pertama yang kemudian dihilangkan dan diganti dengan posisi wajah dua yang berada pada koordinat yang berbeda.
28 Sumbu PAN
29 Sumbu PAN Steadystate=( )*58 Steadystate= 928 ms Risetime=90%xSteadystate Risetime=90%x928 ms Risetime=835 ms Settlingtime= 2%xSteadystate Settlingtime= 2%x928 ms Settlingtime= ms Overshoot tidak terjadi karena pada waktu 928ms, posisi wajah telah berada pada piksel ke 357 dimana piksel tersebut termasuk dari setpoint yakni antara piksel 270 hingga piksel 370.



30 Sumbu TILT
31 Sumbu TILT Steadystate = Steadystate = 696 ms Risetime = 90%xSteadystate Risetime = 90%x696 ms Risetime = 626 ms Settlingtime = 2%xSteadystate Settlingtime = 2%x696 ms Settlingtime = ms Overshoot juga tidak terjadi pada percobaan ini karena posisi wajah telah berada pada piksel 231 pada sumbu tilt sehingga nilai tersebut termasuk setpoint antara 190 hingga 290.

32 Velocity of face tracking test
33 Sumbu PAN Kecepatan Maksimum = 0,7 m/s
34 Sumbu TILT Kecepatan Maksimum = 0,6 m/s
35 Kesimpulan Dari hasil pengujian, terlihat bahwa sistem Pan-Tilt Tripod dapat bekerja mengikuti wajah apabila kamera smartphone Android mendapatkan pencahayaan yang cukup, kecepatan rata-rata frame dari kamera berada pada nilai 17 fps, dan kecepatan wajah yang dapat diikuti berkisar pada nilai 0,65 m/s. Nilai tersebut masih sangat terbatas apabila Pan-Tilt Tripod ingin digunakan pada aplikasi lain yang membutuhkan kecepatan tinggi. Parameter seperti overshoot, steady-state, rise-time, dan settling-time menunjukkan kinerja kontroler PID yang telah di tuning sudah memenuhi kriteria Tugas Akhir ini dikarenakan tidak ada overshoot yang terjadi selama pengujian, dan nilai steady state pada sumbu Pan 928 ms, dan pada sumbu Tilt sebesar 696 ms yang mengindikasikan kecepatan kontroler dalam mengontrol Pan-Tilt Tripod.
36 Saran 1. Agar kedepannya Pan-Tilt Tripod ini digunakan pada kamera smartphone yang memiliki fps yang lebih tinggi lagi sehingga didapatkan sampling rate lebih baik dan peningkatan kinerja kontroler. 2. Pada pendeteksian wajah diberikan penggunaan filter tertentu untuk mereduksi kesalahan dalam pendeteksian wajah sehingga hasil pendeteksian wajah dapat lebih akurat. 3. Penggunaan pencahayaan tambahan ketika Pan-Tilt Tripod digunakan pada ruangan yang pencahayaannya kurang.
37
38 Demo
39

40

41
42
43
Sistem Kamera dengan Pan-Tilt Tripod Otomatis untuk Aplikasi Fotografi
 1 Sistem Kamera dengan Pan-Tilt Tripod Otomatis untuk Aplikasi Fotografi Jourdan Septiansyah Efflan, Ronny Mardiyanto, ST.,MT.,Ph.D. dan Ir. Djoko Purwanto,M.Eng.,Ph.D. Teknik Elektro, Fakultas Teknologi
1 Sistem Kamera dengan Pan-Tilt Tripod Otomatis untuk Aplikasi Fotografi Jourdan Septiansyah Efflan, Ronny Mardiyanto, ST.,MT.,Ph.D. dan Ir. Djoko Purwanto,M.Eng.,Ph.D. Teknik Elektro, Fakultas Teknologi
SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID
 SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID Raditya Wiradhana, Pembimbing 1: M. Aziz Muslim, Pembimbing 2: Purwanto. 1 Abstrak Pada saat ini masih banyak tungku bakar berbahan
SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID Raditya Wiradhana, Pembimbing 1: M. Aziz Muslim, Pembimbing 2: Purwanto. 1 Abstrak Pada saat ini masih banyak tungku bakar berbahan
BAB IV HASIL DAN PEMBAHASAN. Pada pengujian program pada Arduino Mega 2560 melalui software
 BAB IV HASIL DAN PEMBAHASAN Pada bab empat ini akan dibahas hasil serta pembahasan pada pengujian otomasi sistem hidroponik yang telah dirancang oleh penulis berupa perangkat keras dan perangkat lunak.
BAB IV HASIL DAN PEMBAHASAN Pada bab empat ini akan dibahas hasil serta pembahasan pada pengujian otomasi sistem hidroponik yang telah dirancang oleh penulis berupa perangkat keras dan perangkat lunak.
Penjejakan Objek Visual berbasis Algoritma Mean Shift dengan menggunakan kamera Pan-Tilt
 Penjejakan Objek Visual berbasis Algoritma Mean Shift dengan menggunakan kamera Pan-Tilt Sulfan Bagus Setyawan 1, Djoko Purwanto 2 Jurusan Teknik Elektro, Institut Teknologi Sepuluh Nopember 1 sulfan13@mhs.ee.its.ac.id
Penjejakan Objek Visual berbasis Algoritma Mean Shift dengan menggunakan kamera Pan-Tilt Sulfan Bagus Setyawan 1, Djoko Purwanto 2 Jurusan Teknik Elektro, Institut Teknologi Sepuluh Nopember 1 sulfan13@mhs.ee.its.ac.id
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Sistem pengenalan wajah adalah aplikasi dari pengolahan citra yang dapat mengidentifikasi seseorang melalui citra digital atau frame video. Sistem pengenalan wajah
BAB 1 PENDAHULUAN 1.1 Latar Belakang Sistem pengenalan wajah adalah aplikasi dari pengolahan citra yang dapat mengidentifikasi seseorang melalui citra digital atau frame video. Sistem pengenalan wajah
JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER
 Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta 24 08 100 068 Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK
Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta 24 08 100 068 Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK
Rancang Bangun Sistem Pengukuran Posisi Target dengan Kamera Stereo untuk Pengarah Senjata Otomatis
 A216 Rancang Bangun Sistem Pengukuran Posisi Target dengan Kamera Stereo untuk Pengarah Senjata Otomatis Anas Maulidi Utama, Djoko Purwanto, dan Ronny Mardiyanto Jurusan Teknik Elektro, Fakultas Teknologi
A216 Rancang Bangun Sistem Pengukuran Posisi Target dengan Kamera Stereo untuk Pengarah Senjata Otomatis Anas Maulidi Utama, Djoko Purwanto, dan Ronny Mardiyanto Jurusan Teknik Elektro, Fakultas Teknologi
ISSN : e-proceeding of Engineering : Vol.4, No.1 April 2017 Page 555
 ISSN : 2355-9365 e-proceeding of Engineering : Vol.4, No.1 April 217 Page 555 Abstrak DESAIN DAN IMPLEMENTASI PENGONTROL PID PADA SISTEM 2 DERAJAT KEBEBASAN UNTUK COLOUR OBJECT TRACKING DESIGN AND IMPLEMENTATION
ISSN : 2355-9365 e-proceeding of Engineering : Vol.4, No.1 April 217 Page 555 Abstrak DESAIN DAN IMPLEMENTASI PENGONTROL PID PADA SISTEM 2 DERAJAT KEBEBASAN UNTUK COLOUR OBJECT TRACKING DESIGN AND IMPLEMENTATION
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan
IMPLEMENTASI KONTROL PID PADA PERGERAKAN LARAS MORTIR 81MM SESUAI DENGAN HASIL PERHITUNGAN KOREKSI TEMBAKAN
 IMPLEMENTASI KONTROL PID PADA PERGERAKAN LARAS MORTIR 81MM SESUAI DENGAN HASIL PERHITUNGAN KOREKSI TEMBAKAN Dimas Silvani F.H 1*, Abd. Rabi 1, Jeki Saputra 2 1 Program Studi Teknik Elektro, Fakultas Teknik,
IMPLEMENTASI KONTROL PID PADA PERGERAKAN LARAS MORTIR 81MM SESUAI DENGAN HASIL PERHITUNGAN KOREKSI TEMBAKAN Dimas Silvani F.H 1*, Abd. Rabi 1, Jeki Saputra 2 1 Program Studi Teknik Elektro, Fakultas Teknik,
Rancang Bangun Sistem Penghitung Laju dan Klasifikasi Kendaraan Berbasis Pengolahan Citra
 Rancang Bangun Sistem Penghitung Laju dan Klasifikasi Kendaraan Berbasis Pengolahan Citra M Agus Taksiono, Dr. Ronny Mardiyanto, ST., MT.dan Ir. Joko Purwanto M.Eng, Ph.d Jurusan Teknik Elektro, Fakultas
Rancang Bangun Sistem Penghitung Laju dan Klasifikasi Kendaraan Berbasis Pengolahan Citra M Agus Taksiono, Dr. Ronny Mardiyanto, ST., MT.dan Ir. Joko Purwanto M.Eng, Ph.d Jurusan Teknik Elektro, Fakultas
Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID
 1 Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID Rievqi Alghoffary, Pembimbing 1: Purwanto, Pembimbing 2: Bambang siswoyo. Abstrak Pengontrolan kecepatan pada alat
1 Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID Rievqi Alghoffary, Pembimbing 1: Purwanto, Pembimbing 2: Bambang siswoyo. Abstrak Pengontrolan kecepatan pada alat
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER
 KONTROLER") SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
BAB 4 PENGUJIAN DAN ANALISA. 4.1 Pengujian Fungsi Alih Tegangan (Duty Cycle) terhadap Motor
 terhadap Motor") BAB 4 PENGUJIAN DAN ANALISA Ada beberapa percobaan yang dilakukan. 4.1 Pengujian Fungsi Alih Tegangan (Duty Cycle) terhadap Motor Pengujian ini dilakukan dengan memberikan input PWM pada motor kemudian
BAB 4 PENGUJIAN DAN ANALISA Ada beberapa percobaan yang dilakukan. 4.1 Pengujian Fungsi Alih Tegangan (Duty Cycle) terhadap Motor Pengujian ini dilakukan dengan memberikan input PWM pada motor kemudian
BAB I PENDAHULUAN. manfaat, baik itu pada bumi dan pada manusia secara tidak langsung [2].
![BAB I PENDAHULUAN. manfaat, baik itu pada bumi dan pada manusia secara tidak langsung [2].](/thumbs/72/67889762.jpg "BAB I PENDAHULUAN. manfaat, baik itu pada bumi dan pada manusia secara tidak langsung [2].") BAB I PENDAHULUAN 1.1 Latar Belakang Matahari adalah salah satu fenomena alam yang memiliki manfaat bagi kelangsungan makhluk hidup di bumi. Intensitas radiasi matahari merupakan salah satu fenomena fisis
BAB I PENDAHULUAN 1.1 Latar Belakang Matahari adalah salah satu fenomena alam yang memiliki manfaat bagi kelangsungan makhluk hidup di bumi. Intensitas radiasi matahari merupakan salah satu fenomena fisis
Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno
 1 Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno Anggara Truna Negara, Pembimbing 1: Retnowati, Pembimbing 2: Rahmadwati. Abstrak Perancangan alat fermentasi kakao otomatis
1 Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno Anggara Truna Negara, Pembimbing 1: Retnowati, Pembimbing 2: Rahmadwati. Abstrak Perancangan alat fermentasi kakao otomatis
YONI WIDHI PRIHANA DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT.
 IMPLEMENTASI SENSOR KAPASITIF PADA SISTEM PENGERING GABAH OTOMATIS YONI WIDHI PRIHANA 2210100194 DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT. LATAR BELAKANG Indonesia merupakan
IMPLEMENTASI SENSOR KAPASITIF PADA SISTEM PENGERING GABAH OTOMATIS YONI WIDHI PRIHANA 2210100194 DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT. LATAR BELAKANG Indonesia merupakan
APLIKASI WEBCAM UNTUK MENJEJAK PERGERAKAN MANUSIA DI DALAM RUANGAN
 APLIKASI WEBCAM UNTUK MENJEJAK PERGERAKAN MANUSIA DI DALAM RUANGAN Kuncoro Adi D, Lukas B. Setyawan, F. Dalu Setiaji APLIKASI WEBCAM UNTUK MENJEJAK PERGERAKAN MANUSIA DI DALAM RUANGAN Kuncoro Adi D 1,
APLIKASI WEBCAM UNTUK MENJEJAK PERGERAKAN MANUSIA DI DALAM RUANGAN Kuncoro Adi D, Lukas B. Setyawan, F. Dalu Setiaji APLIKASI WEBCAM UNTUK MENJEJAK PERGERAKAN MANUSIA DI DALAM RUANGAN Kuncoro Adi D 1,
PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO. Else Orlanda Merti Wijaya.
 PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO Else Orlanda Merti Wijaya S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : elsewijaya@mhs.unesa.ac.id
PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO Else Orlanda Merti Wijaya S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : elsewijaya@mhs.unesa.ac.id
TUGAS AKHIR - TE
 TUGAS AKHIR - TE 091399 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID UNTUK PENGATURAN ARAH DAN PENGATURAN HEADING PADA FIXED-WING UAV (UNMANNED AERIAL VEHICLE) Hery Setyo Widodo NRP. 2208100176 Laboratorium
TUGAS AKHIR - TE 091399 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID UNTUK PENGATURAN ARAH DAN PENGATURAN HEADING PADA FIXED-WING UAV (UNMANNED AERIAL VEHICLE) Hery Setyo Widodo NRP. 2208100176 Laboratorium
IV. PERANCANGAN SISTEM
 SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
BAB III PERANCANGAN DAN PEMBUATAN SISTEM
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software maupun hardware yang digunakan untuk mendukung keseluruhan sistem
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software maupun hardware yang digunakan untuk mendukung keseluruhan sistem
BAB I PENDAHULUAN. Indonesia dengan sistem robot tanpa awak yang dapat dikendalikan secara otomatis
 BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan Negara kepulauan dengan wilayah perairannya mencapai + 2/3 dari luas total wilayah Indonesia. Dengan memanfaatkan potensi wilayah tersebut banyak
BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan Negara kepulauan dengan wilayah perairannya mencapai + 2/3 dari luas total wilayah Indonesia. Dengan memanfaatkan potensi wilayah tersebut banyak
Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID
 Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID 1 Ahmad Akhyar, Pembimbing 1: Purwanto, Pembimbing 2: Erni Yudaningtyas. Abstrak Alat penyiram tanaman yang sekarang
Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID 1 Ahmad Akhyar, Pembimbing 1: Purwanto, Pembimbing 2: Erni Yudaningtyas. Abstrak Alat penyiram tanaman yang sekarang
BAB III PERANCANGAN DAN PEMBUATAN SISTEM. Gambar 3. 1 Diagram Blok Sistem Kecepatan Motor DC
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
DESAIN DAN IMPELEMENTASI KENDALI PID PADA BEAM AND BALL SYSTEM
 ISSN : 2355-9365 e-proceeding of Engineering : Vol.4, No.3 Desember 27 Page 3286 DESAIN DAN IMPELEMENTASI KENDALI PID PADA BEAM AND BALL SYSTEM DESIGN AND IMPLEMENTATION OF PID CONTROLLER ON BEAM AND BALL
ISSN : 2355-9365 e-proceeding of Engineering : Vol.4, No.3 Desember 27 Page 3286 DESAIN DAN IMPELEMENTASI KENDALI PID PADA BEAM AND BALL SYSTEM DESIGN AND IMPLEMENTATION OF PID CONTROLLER ON BEAM AND BALL
TUGAS AKHIR TE
 TUGAS AKHIR TE 091399 RANCANG BANGUN SISTEM PENGHITUNG LAJU DAN KLASIFIKASI KENDARAAN BERBASIS PENGOLAHAN CITRA Oleh M Agus Taksiono 2209100708 Dosen Pembimbing Ronny Mardiyanto, ST., MT.,Ph.D Ir. Djoko
TUGAS AKHIR TE 091399 RANCANG BANGUN SISTEM PENGHITUNG LAJU DAN KLASIFIKASI KENDARAAN BERBASIS PENGOLAHAN CITRA Oleh M Agus Taksiono 2209100708 Dosen Pembimbing Ronny Mardiyanto, ST., MT.,Ph.D Ir. Djoko
BAB IV ANALISIS DATA HASIL PERCOBAAN
 BAB IV ANALISIS DATA HASIL PERCOBAAN Setelah dilakukan perancangan rangkaian kendali pada prototype mesin tetas yang baru maka dilakukan pengetesan terhadap sistem per blok hingga secara keseluruhan. 4.1
BAB IV ANALISIS DATA HASIL PERCOBAAN Setelah dilakukan perancangan rangkaian kendali pada prototype mesin tetas yang baru maka dilakukan pengetesan terhadap sistem per blok hingga secara keseluruhan. 4.1
SISTEM KONTROL GERAK SEDERHANA PADA ROBOT PENGHINDAR HALANGAN BERBASIS KAMERA DAN PENGOLAHAN CITRA
 SISTEM KONTROL GERAK SEDERHANA PADA ROBOT PENGHINDAR HALANGAN BERBASIS KAMERA DAN PENGOLAHAN CITRA Dirvi Eko Juliando Sudirman 1) 1) Teknik Komputer Kontrol Politeknik Negeri Madiun Jl Serayu No. 84, Madiun,
SISTEM KONTROL GERAK SEDERHANA PADA ROBOT PENGHINDAR HALANGAN BERBASIS KAMERA DAN PENGOLAHAN CITRA Dirvi Eko Juliando Sudirman 1) 1) Teknik Komputer Kontrol Politeknik Negeri Madiun Jl Serayu No. 84, Madiun,
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT)
") DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
Siswo Dwi Utomo. Dosen Pembimbing: Dr. Ir. Djoko Purwanto M.Eng Dr. Tri Arief Sardjono ST. MT
 Siswo Dwi Utomo 2209 106 020 Dosen Pembimbing: Dr. Ir. Djoko Purwanto M.Eng Dr. Tri Arief Sardjono ST. MT. 196 512 111 990 021 002 197 002 121 995 121 001 PENDAHULUAN 1. Latar Belakang 2. Batasan Masalah
Siswo Dwi Utomo 2209 106 020 Dosen Pembimbing: Dr. Ir. Djoko Purwanto M.Eng Dr. Tri Arief Sardjono ST. MT. 196 512 111 990 021 002 197 002 121 995 121 001 PENDAHULUAN 1. Latar Belakang 2. Batasan Masalah
Pengendalian Gerak Robot Penghindar Halangan Menggunakan Citra dengan Kontrol PID
 Journal of Electrical Electronic Control and Automotive Engineering (JEECAE) Pengendalian Gerak Robot Penghindar Halangan Menggunakan Citra dengan Kontrol PID Basuki Winarno, S.T., M.T. Jurusan Teknik
Journal of Electrical Electronic Control and Automotive Engineering (JEECAE) Pengendalian Gerak Robot Penghindar Halangan Menggunakan Citra dengan Kontrol PID Basuki Winarno, S.T., M.T. Jurusan Teknik
Rancang Bangun Sistem Pelacakan Obyek Menggunakan CCTV dan Webcam. Kampus ITS, Surabaya
 Rancang Bangun Sistem Pelacakan Obyek Menggunakan CCTV dan Webcam Choirul Umul Islami 1, Mike Yuliana 2, Akuwan Shaleh 2 1 Mahasiswa Politeknik Elektronika Negeri Surabaya, Jurusan Teknik Telekomunikasi
Rancang Bangun Sistem Pelacakan Obyek Menggunakan CCTV dan Webcam Choirul Umul Islami 1, Mike Yuliana 2, Akuwan Shaleh 2 1 Mahasiswa Politeknik Elektronika Negeri Surabaya, Jurusan Teknik Telekomunikasi
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID
 UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
BAB I PENDAHULUAN. manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi
 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi yang semakin pesat dipicu oleh kebutuhan manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi perintah user dalam hal
BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi yang semakin pesat dipicu oleh kebutuhan manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi perintah user dalam hal
Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID
 Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID Arga Rifky Nugraha, Pembimbing 1: Rahmadwati, Pembimbing 2: Retnowati. 1 Abstrak Pengontrolan kecepatan pada
Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID Arga Rifky Nugraha, Pembimbing 1: Rahmadwati, Pembimbing 2: Retnowati. 1 Abstrak Pengontrolan kecepatan pada
SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560
 1 SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560 Adityan Ilmawan Putra, Pembimbing 1: Purwanto, Pembimbing 2: Bambang Siswojo.
1 SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560 Adityan Ilmawan Putra, Pembimbing 1: Purwanto, Pembimbing 2: Bambang Siswojo.
BAB IV HASIL DAN PENGUJIAN. menganalisa hasil alat yang telah dibuat. Dalam pembuatan alat ini terbagi
 BAB IV HASIL DAN PENGUJIAN 4.1 Hasil Perancangan Pada tahapan setelah selesai perancangan yang penulis lakukan adalah menganalisa hasil alat yang telah dibuat. Dalam pembuatan alat ini terbagi menjadi
BAB IV HASIL DAN PENGUJIAN 4.1 Hasil Perancangan Pada tahapan setelah selesai perancangan yang penulis lakukan adalah menganalisa hasil alat yang telah dibuat. Dalam pembuatan alat ini terbagi menjadi
BAB 4 IMPLEMENTASI DAN EVALUASI. (secara hardware).hasil implementasi akan dievaluasi untuk mengetahui apakah
.hasil implementasi akan dievaluasi untuk mengetahui apakah") BAB 4 IMPLEMENTASI DAN EVALUASI Pelaksanaan dari perancangan telah dibuat dan dijelaskan pada Bab 3, kemudian perancangan tersebut diimplementasi ke dalam bentuk yang nyata (secara hardware).hasil implementasi
BAB 4 IMPLEMENTASI DAN EVALUASI Pelaksanaan dari perancangan telah dibuat dan dijelaskan pada Bab 3, kemudian perancangan tersebut diimplementasi ke dalam bentuk yang nyata (secara hardware).hasil implementasi
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1.Analisa Masalah Dalam perancangan dan implementasi robot keseimbangan dengan menggunakan metode PID, terdapat beberapa masalah yang harus dipecahkan. Permasalahan
BAB III ANALISA DAN PERANCANGAN III.1.Analisa Masalah Dalam perancangan dan implementasi robot keseimbangan dengan menggunakan metode PID, terdapat beberapa masalah yang harus dipecahkan. Permasalahan
PENERAPAN ALGORITMA KENDALI PROPORTIONAL INTEGRAL DERIVATIVE PADA SISTEM REAL TIME UNTUK MEMPELAJARI TANGGAPAN TRANSIEN
 PENERAPAN ALGORITMA KENDALI PROPORTIONAL INTEGRAL DERIVATIVE PADA SISTEM REAL TIME UNTUK MEMPELAJARI TANGGAPAN TRANSIEN Isnan Nur Rifai 1, Panji Saka Gilab Asa 2 Diploma Elektronika Dan Instrumentasi Sekolah
PENERAPAN ALGORITMA KENDALI PROPORTIONAL INTEGRAL DERIVATIVE PADA SISTEM REAL TIME UNTUK MEMPELAJARI TANGGAPAN TRANSIEN Isnan Nur Rifai 1, Panji Saka Gilab Asa 2 Diploma Elektronika Dan Instrumentasi Sekolah
BAB III PERANCANGAN DAN PEMBUATAN APLIKASI
 BAB III PERANCANGAN DAN PEMBUATAN APLIKASI Dalam bab ini akan dibahas mengenai perancangan dan pembuatan aplikasi dengan menggunakan metodologi perancangan prototyping, prinsip kerja rangkaian berdasarkan
BAB III PERANCANGAN DAN PEMBUATAN APLIKASI Dalam bab ini akan dibahas mengenai perancangan dan pembuatan aplikasi dengan menggunakan metodologi perancangan prototyping, prinsip kerja rangkaian berdasarkan
SEMINAR TUGAS AKHIR. Dosen Pembimbing: Imam Abadi, ST, MT Dr. Ir.Ali Musyafa MSc
 SEMINAR TUGAS AKHIR RANCANG BANGUN APLIKASI KONTROL PID SISTEM PENJEJAK MATAHARI UNTUK PANEL SURYA PADA SISTEM TEKNOLOGI HYBRID KONVERSI ENERGI SURYA & ANGIN Disusun Oleh : Uqud Adyat Ade Wijaya NRP. 2410
SEMINAR TUGAS AKHIR RANCANG BANGUN APLIKASI KONTROL PID SISTEM PENJEJAK MATAHARI UNTUK PANEL SURYA PADA SISTEM TEKNOLOGI HYBRID KONVERSI ENERGI SURYA & ANGIN Disusun Oleh : Uqud Adyat Ade Wijaya NRP. 2410
BAB 3 ANALISIS DAN PERANCANGAN
 40 BAB 3 ANALISIS DAN PERANCANGAN 3.1. Analisis Sistem Analisis sistem bertujuan untuk memecah sistem ke dalam komponen-komponen subsistem yang lebih kecil untuk mengetahui hubungan setiap komponen tersebut
40 BAB 3 ANALISIS DAN PERANCANGAN 3.1. Analisis Sistem Analisis sistem bertujuan untuk memecah sistem ke dalam komponen-komponen subsistem yang lebih kecil untuk mengetahui hubungan setiap komponen tersebut
BAB IV PENGUJIAN DAN ANALISIS
 BAB IV PENGUJIAN DAN ANALISIS Pada bab ini akan dijelaskan mengenai pengujian dan analisis alat peraga sistem kendali pendulum terbalik yang meliputi pengujian dimensi mekanik, pengujian dimensi dan massa
BAB IV PENGUJIAN DAN ANALISIS Pada bab ini akan dijelaskan mengenai pengujian dan analisis alat peraga sistem kendali pendulum terbalik yang meliputi pengujian dimensi mekanik, pengujian dimensi dan massa
BAB V. IMPLEMENTASI DAN PENGUJIAN
 BAB V. IMPLEMENTASI DAN PENGUJIAN Bab ini merupakan tahap implementasi dari perancangan yang telah dilakukan pada bab sebelumnya dan tahap pengujian setiap komponen komponen pembangun E-dump yang terdiri
BAB V. IMPLEMENTASI DAN PENGUJIAN Bab ini merupakan tahap implementasi dari perancangan yang telah dilakukan pada bab sebelumnya dan tahap pengujian setiap komponen komponen pembangun E-dump yang terdiri
BAB III PERANCANGAN. Pada bab ini akan dijelaskan perancangan perangkat keras serta perangkat lunak algoritma pergerakan dan komunikasi robot.
 BAB III PERANCANGAN Pada bab ini akan dijelaskan perancangan perangkat keras serta perangkat lunak algoritma pergerakan dan komunikasi robot. 3.1.Gambaran Sistem Sistem instruksi pergerakan pada robot
BAB III PERANCANGAN Pada bab ini akan dijelaskan perancangan perangkat keras serta perangkat lunak algoritma pergerakan dan komunikasi robot. 3.1.Gambaran Sistem Sistem instruksi pergerakan pada robot
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan Negara kepulauan dengan panjang pantai 81.000 Km dimana ± 2/3 wilayah kedaulatannya berupa perairan. Dengan memanfaatkan potensi wilayah ini banyak
BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan Negara kepulauan dengan panjang pantai 81.000 Km dimana ± 2/3 wilayah kedaulatannya berupa perairan. Dengan memanfaatkan potensi wilayah ini banyak
BAB III PERANCANGAN. perancangan mekanik, perancangan hardware dan perancangan software.
 BAB III PERANCANGAN Pada bab ini akan membahas mengenai perancangan sistem. Perancangan ini akan terbagi beberapa bagian yaitu : blok diagram sistem, pemilihan komponen, perancangan mekanik, perancangan
BAB III PERANCANGAN Pada bab ini akan membahas mengenai perancangan sistem. Perancangan ini akan terbagi beberapa bagian yaitu : blok diagram sistem, pemilihan komponen, perancangan mekanik, perancangan
BAB 5 IMPLEMENTASI DAN PENGUJIAN
 BAB 5 IMPLEMENTASI DAN PENGUJIAN Pada Bab ini menjelaskan mengenai langkah-langkah untuk memproses pergerakan motor servo yang diperoleh kemudian diproses oleh Arduino kepada motor servo. Tujuan dari pengujian
BAB 5 IMPLEMENTASI DAN PENGUJIAN Pada Bab ini menjelaskan mengenai langkah-langkah untuk memproses pergerakan motor servo yang diperoleh kemudian diproses oleh Arduino kepada motor servo. Tujuan dari pengujian
Perancangan dan Implementasi Kontroler PID Optimal Untuk Tracking Lintasan Gerakan Lateral Pada UAV(Unmanned Aerial Vehicle)
") Perancangan dan Implementasi Kontroler PID Optimal Untuk Tracking Lintasan Gerakan Lateral Pada UAV(Unmanned Aerial Vehicle) Rahmat Fauzi 2209106077 Pembimbing : Surabaya, 26 Januari 2012 Ir. Rusdhianto
Perancangan dan Implementasi Kontroler PID Optimal Untuk Tracking Lintasan Gerakan Lateral Pada UAV(Unmanned Aerial Vehicle) Rahmat Fauzi 2209106077 Pembimbing : Surabaya, 26 Januari 2012 Ir. Rusdhianto
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai gambaran alat, perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem kendali pendulum terbalik. 3.1.
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai gambaran alat, perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem kendali pendulum terbalik. 3.1.
OPTIMASI ALGORITMA IDENTIFIKASI STRABISMUS
 OPTIMASI ALGORITMA IDENTIFIKASI STRABISMUS PADA MATA MANUSIA BERBASIS IMAGE PROCESSING DENGAN EUCLIDEAN DISTANCE PADA SISTEM MEKANIKAL AUTOMATED OPTICAL INSPECTION (AOI) AHMAD RIFA I RIF AN NRP. 2106 100
OPTIMASI ALGORITMA IDENTIFIKASI STRABISMUS PADA MATA MANUSIA BERBASIS IMAGE PROCESSING DENGAN EUCLIDEAN DISTANCE PADA SISTEM MEKANIKAL AUTOMATED OPTICAL INSPECTION (AOI) AHMAD RIFA I RIF AN NRP. 2106 100
REALISASI PROTOTIPE KURSI RODA LISTRIK DENGAN PENGONTROL PID
 REALISASI PROTOTIPE KURSI RODA LISTRIK DENGAN PENGONTROL PID Disusun Oleh: Samuel Natanto Herlendra 0422031 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha, Jl. Prof.Drg.Suria Sumantri,
REALISASI PROTOTIPE KURSI RODA LISTRIK DENGAN PENGONTROL PID Disusun Oleh: Samuel Natanto Herlendra 0422031 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha, Jl. Prof.Drg.Suria Sumantri,
BAB II DASAR TEORI. Gambar 2.1. Letak CoM dan poros putar robot pada sumbu kartesian.
 BAB II DASAR TEORI Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem yang dirancang. Teori-teori yang digunakan dalam realisasi skripsi ini antara
BAB II DASAR TEORI Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem yang dirancang. Teori-teori yang digunakan dalam realisasi skripsi ini antara
BAB I PENDAHULUAN. Sistem kendali yang digunakan dunia industri maupun rumah tangga
 1 BAB I PENDAHULUAN 1. 1 Latar Belakang Sistem kendali yang digunakan dunia industri maupun rumah tangga sangat berkembang, seperti halnya sistem pengendalian air yang berada dalam satu tangki yang sering
1 BAB I PENDAHULUAN 1. 1 Latar Belakang Sistem kendali yang digunakan dunia industri maupun rumah tangga sangat berkembang, seperti halnya sistem pengendalian air yang berada dalam satu tangki yang sering
BAB IV PENGUJIAN DAN ANALISA
 BAB IV PENGUJIAN DAN ANALISA Pengujian dan analisa sistem merupakan tahap akhir dari realisasi pengendali PID pada pendulum terbalik menggunakan mikrokontroller ATmega8 agar dapat dilinearkan disekitar
BAB IV PENGUJIAN DAN ANALISA Pengujian dan analisa sistem merupakan tahap akhir dari realisasi pengendali PID pada pendulum terbalik menggunakan mikrokontroller ATmega8 agar dapat dilinearkan disekitar
PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC
 Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
BAB IV PENGUJIAN ALAT DAN ANALISA
 BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 PENDAHULUAN Setelah proses perancangan selesai, maka pada bab ini akan dijelaskan mengenai persiapan komponen, peralatan yang dipergunakan, serta pengujian pada alat.
BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 PENDAHULUAN Setelah proses perancangan selesai, maka pada bab ini akan dijelaskan mengenai persiapan komponen, peralatan yang dipergunakan, serta pengujian pada alat.
Perancangan Sistem Kontrol Posisi Miniatur Plant Crane dengan Kontrol PID Menggunakan PLC
 88 ISSN 1979-2867 (print) Electrical Engineering Journal Vol. 5 (215) No. 2, pp. 88-17 Perancangan Sistem Kontrol Posisi Miniatur Plant Crane dengan Kontrol PID Menggunakan PLC E. Merry Sartika dan Hardi
88 ISSN 1979-2867 (print) Electrical Engineering Journal Vol. 5 (215) No. 2, pp. 88-17 Perancangan Sistem Kontrol Posisi Miniatur Plant Crane dengan Kontrol PID Menggunakan PLC E. Merry Sartika dan Hardi
Oleh : Dia Putranto Harmay Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc
 Oleh : Dia Putranto Harmay 2105.100.145 Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc Latar Belakang Usman Awan dkk, 2001 Merancang dan membuat dynamometer jenis prony brake dengan menggunakan strain gauge
Oleh : Dia Putranto Harmay 2105.100.145 Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc Latar Belakang Usman Awan dkk, 2001 Merancang dan membuat dynamometer jenis prony brake dengan menggunakan strain gauge
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
4.1 Pengujian Tuning Pengontrol PD
 BAB IV PENGUJIAN DAN ANALISA Pada bab ini akan membahas mengenai pengujian dan analisa dari sistem yang dibuat, yaitu sebagai berikut : 4.1 Pengujian Tuning Pengontrol PD Prinsip kerja dari perancangan
BAB IV PENGUJIAN DAN ANALISA Pada bab ini akan membahas mengenai pengujian dan analisa dari sistem yang dibuat, yaitu sebagai berikut : 4.1 Pengujian Tuning Pengontrol PD Prinsip kerja dari perancangan
BAB IV HASIL DAN UJI COBA
 BAB IV HASIL DAN UJI COBA IV.1. Software Software arduino merupakan software yang sangat penting karena merupakan proses penginputan data dari komputer ke dalam mikrokontroler arduino menggunakan software
BAB IV HASIL DAN UJI COBA IV.1. Software Software arduino merupakan software yang sangat penting karena merupakan proses penginputan data dari komputer ke dalam mikrokontroler arduino menggunakan software
M.FADHILLAH RIFKI ( ) Pembimbing: Dr.Ir. Bambang Sampurno, MT
 Pembimbing: Dr.Ir. Bambang Sampurno, MT") IMPLEMENTASI KONTROL PD UNTUK MENGATUR KECEPATAN MOTOR DC PADA ECVT (ELECTRIKAL CONTINUOUSLY VARIABLE TRANSMISSION) M.FADHILLAH RIFKI (2108.100.512) Pembimbing: Dr.Ir. Bambang Sampurno, MT Latar Belakang
IMPLEMENTASI KONTROL PD UNTUK MENGATUR KECEPATAN MOTOR DC PADA ECVT (ELECTRIKAL CONTINUOUSLY VARIABLE TRANSMISSION) M.FADHILLAH RIFKI (2108.100.512) Pembimbing: Dr.Ir. Bambang Sampurno, MT Latar Belakang
BAB I PENDAHULUAN 1.1. Latar Belakang
 BAB I PENDAHULUAN 1.1. Latar Belakang Dewasa ini, teknologi pemrosesan sinyal digital (PSD), salah satunya pemrosesan suara, merupakan salah satu bidang riset yang berkembang pesat beberapa tahun belakangan.
BAB I PENDAHULUAN 1.1. Latar Belakang Dewasa ini, teknologi pemrosesan sinyal digital (PSD), salah satunya pemrosesan suara, merupakan salah satu bidang riset yang berkembang pesat beberapa tahun belakangan.
BAB I PENDAHULUAN Latar Belakang
 BAB I PENDAHULUAN 1.1. Latar Belakang Di masa sekarang, berkembangnya teknologi khususnya pada bidang elektronika, memicu pula berkembangnya berbagai aspek bidang yang dipengaruhi olehnya. Salah satunya
BAB I PENDAHULUAN 1.1. Latar Belakang Di masa sekarang, berkembangnya teknologi khususnya pada bidang elektronika, memicu pula berkembangnya berbagai aspek bidang yang dipengaruhi olehnya. Salah satunya
BAB III PERANCANGAN. Gambar 3.1. Sistem instruksi dan kontrol robot.
 BAB III PERANCANGAN Membahas perancangan sistem yang terdiri dari gambaran umum sistem dan bagaimana mengolah informasi yang didapat dari penglihatan dan arah hadap robot di dalam algoritma penentuan lokasi
BAB III PERANCANGAN Membahas perancangan sistem yang terdiri dari gambaran umum sistem dan bagaimana mengolah informasi yang didapat dari penglihatan dan arah hadap robot di dalam algoritma penentuan lokasi
pengendali Konvensional Time invariant P Proportional Kp
 Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
Purwarupa Sistem Peringatan Dini dan Kendali Pintu Air Bendungan dengan Kendali PID
 IJEIS, Vol.4, No.2, October 2014, pp. 167~176 ISSN: 2088-3714 167 Purwarupa Sistem Peringatan Dini dan Kendali Pintu Air Bendungan dengan Kendali PID Benni Sahputra* 1, Panggih Basuki 2 1 Prodi Elektronika
IJEIS, Vol.4, No.2, October 2014, pp. 167~176 ISSN: 2088-3714 167 Purwarupa Sistem Peringatan Dini dan Kendali Pintu Air Bendungan dengan Kendali PID Benni Sahputra* 1, Panggih Basuki 2 1 Prodi Elektronika
BAB III METODOLOGI PENELITIAN
 BAB III METODOLOGI PENELITIAN 3.1 Tahapan Penelitian Pada penelitian tugas akhir ini ada beberapa tahapan penelitian yang akan dilakukan seperti yang terlihat pada gambar 3.1 : Mulai Pengumpulan Data Analisa
BAB III METODOLOGI PENELITIAN 3.1 Tahapan Penelitian Pada penelitian tugas akhir ini ada beberapa tahapan penelitian yang akan dilakukan seperti yang terlihat pada gambar 3.1 : Mulai Pengumpulan Data Analisa
Penggunaan Sensor Kesetimbangan Accelerometer dan Sensor Halangan Ultrasonic pada Aplikasi Robot Berkaki Dua
 Volume 1 Nomor 2, April 217 e-issn : 2541-219 p-issn : 2541-44X Penggunaan Sensor Kesetimbangan Accelerometer dan Sensor Halangan Ultrasonic pada Aplikasi Robot Berkaki Dua Abdullah Sekolah Tinggi Teknik
Volume 1 Nomor 2, April 217 e-issn : 2541-219 p-issn : 2541-44X Penggunaan Sensor Kesetimbangan Accelerometer dan Sensor Halangan Ultrasonic pada Aplikasi Robot Berkaki Dua Abdullah Sekolah Tinggi Teknik
BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi merupakan sebuah hal yang akan terus berkembang mengikuti jaman. Seiring perkembangan jaman,
 BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi merupakan sebuah hal yang akan terus berkembang mengikuti jaman. Seiring perkembangan jaman, masyarakat selalu bergantung kepada teknologi, dikarenakan teknologi
BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi merupakan sebuah hal yang akan terus berkembang mengikuti jaman. Seiring perkembangan jaman, masyarakat selalu bergantung kepada teknologi, dikarenakan teknologi
FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC
 FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC Afriadi Rahman #1, Agus Indra G, ST, M.Sc, #2, Dr. Rusminto Tjatur W, ST, #3, Legowo S, S.ST, M.Sc #4 # Jurusan Teknik
FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC Afriadi Rahman #1, Agus Indra G, ST, M.Sc, #2, Dr. Rusminto Tjatur W, ST, #3, Legowo S, S.ST, M.Sc #4 # Jurusan Teknik
BAB IV IMPLEMENTASI DAN EVALUASI. Jones, kami membuat sebuah aplikasi sederhana, dengan spesifikasi perangkat lunak
 BAB IV IMPLEMENTASI DAN EVALUASI 4.1 Aplikasi Pengujian Untuk menguji kecepatan dan keakuratan metode pendeteksian wajah Viola Jones, kami membuat sebuah aplikasi sederhana, dengan spesifikasi perangkat
BAB IV IMPLEMENTASI DAN EVALUASI 4.1 Aplikasi Pengujian Untuk menguji kecepatan dan keakuratan metode pendeteksian wajah Viola Jones, kami membuat sebuah aplikasi sederhana, dengan spesifikasi perangkat
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari algoritma robot. 3.1. Perancangan Perangkat Keras Pada bagian ini akan dijelaskan
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari algoritma robot. 3.1. Perancangan Perangkat Keras Pada bagian ini akan dijelaskan
Syahrir Abdussamad, Simulasi Kendalian Flow Control Unit G.U.N.T Tipe 020 dengan Pengendali PID
 Syahrir Abdussamad, Simulasi Kendalian Control Unit G.U.N.T Tipe dengan Pengendali PID MEDIA ELEKTRIK, Volume 4 Nomor, Juni 9 SIMULASI KENDALIAN FLOW CONTROL UNIT G.U.N.T TIPE DENGAN PENGENDALI PID Syahrir
Syahrir Abdussamad, Simulasi Kendalian Control Unit G.U.N.T Tipe dengan Pengendali PID MEDIA ELEKTRIK, Volume 4 Nomor, Juni 9 SIMULASI KENDALIAN FLOW CONTROL UNIT G.U.N.T TIPE DENGAN PENGENDALI PID Syahrir
Kendali Perancangan Kontroler PID dengan Metode Root Locus Mencari PD Kontroler Mencari PI dan PID kontroler...
 DAFTAR ISI LEMBAR PENGESAHAN DOSEN PEMBIMBING... i LEMBAR PENGESAHAN DOSEN PENGUJI... ii HALAMAN PERSEMBAHAN... iii HALAMAN MOTTO... iv KATA PENGANTAR... v ABSTRAK... vii DAFTAR ISI... ix DAFTAR TABEL...
DAFTAR ISI LEMBAR PENGESAHAN DOSEN PEMBIMBING... i LEMBAR PENGESAHAN DOSEN PENGUJI... ii HALAMAN PERSEMBAHAN... iii HALAMAN MOTTO... iv KATA PENGANTAR... v ABSTRAK... vii DAFTAR ISI... ix DAFTAR TABEL...
BAB 4 IMPLEMENTASI DAN EVALUASI. menggunakan serial port (baudrate 4800bps, COM1). Menggunakan Sistem Operasi Windows XP.
. Menggunakan Sistem Operasi Windows XP.") BAB 4 IMPLEMENTASI DAN EVALUASI Bab ini menjelaskan tentang hasil penelitian yang berupa spesifikasi sistem, prosedur operasional penggunaan program, dan analisa sistem yang telah dibuat. 4.1 Spesifikasi
BAB 4 IMPLEMENTASI DAN EVALUASI Bab ini menjelaskan tentang hasil penelitian yang berupa spesifikasi sistem, prosedur operasional penggunaan program, dan analisa sistem yang telah dibuat. 4.1 Spesifikasi
RANCANG BANGUN SISTEM KENDALI KECEPATAN KURSI RODA LISTRIK BERBASIS DISTURBANCE OBSERVER
 RANCANG BANGUN SISTEM KENDALI KECEPATAN KURSI RODA LISTRIK BERBASIS DISTURBANCE OBSERVER Firdaus NRP 2208 204 009 PROGRAM MAGISTER BIDANG KEAHLIAN TEKNIK ELEKTRONIKA TEKNIK ELEKTRO Fakultas Teknologi Industri
RANCANG BANGUN SISTEM KENDALI KECEPATAN KURSI RODA LISTRIK BERBASIS DISTURBANCE OBSERVER Firdaus NRP 2208 204 009 PROGRAM MAGISTER BIDANG KEAHLIAN TEKNIK ELEKTRONIKA TEKNIK ELEKTRO Fakultas Teknologi Industri
PENGENDALIAN KECEPATAN MOTOR DC MENGGUNAKAN SENSOR ENCODER DENGAN KENDALI PI
 PENGENDALIAN KECEPATAN MOTOR DC MENGGUNAKAN SENSOR ENCODER DENGAN KENDALI PI Jumiyatun Jurusan Teknik Elektro Fakultas Teknik Universitas Tadolako E-mail: jum@untad.ac.id ABSTRACT Digital control system
PENGENDALIAN KECEPATAN MOTOR DC MENGGUNAKAN SENSOR ENCODER DENGAN KENDALI PI Jumiyatun Jurusan Teknik Elektro Fakultas Teknik Universitas Tadolako E-mail: jum@untad.ac.id ABSTRACT Digital control system
SISTEM PENGENDALIAN SUHU PADA PROSES DISTILASI VAKUM BIOETANOL DENGAN MENGGUNAKAN ARDUINO
 1 SISTEM PENGENDALIAN SUHU PADA PROSES DISTILASI VAKUM BIOETANOL DENGAN MENGGUNAKAN ARDUINO Akhmad Salmi Firsyari, Pembimbing 1: Ir. Purwanto MT., Pembimbing 2: dan M Aziz Muslim ST., MT., Ph.D. Abstrak
1 SISTEM PENGENDALIAN SUHU PADA PROSES DISTILASI VAKUM BIOETANOL DENGAN MENGGUNAKAN ARDUINO Akhmad Salmi Firsyari, Pembimbing 1: Ir. Purwanto MT., Pembimbing 2: dan M Aziz Muslim ST., MT., Ph.D. Abstrak
BAB I PENDAHULUAN 1.1 Latar Belakang
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Dalam menunjang produktivitas pekerjaan, manusia telah lama menginginkan sebuah asisten pribadi yang mampu melakukan beberapa tugas. Asisten berupa robot otomatis
1 BAB I PENDAHULUAN 1.1 Latar Belakang Dalam menunjang produktivitas pekerjaan, manusia telah lama menginginkan sebuah asisten pribadi yang mampu melakukan beberapa tugas. Asisten berupa robot otomatis
BAB I PENDAHULUAN. dengan menambahkan PID (Proportional-Integral-Derivative) sebagai metode. kendali didalam base motor pada robot tersebut.
 sebagai metode. kendali didalam base motor pada robot tersebut.") BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Secara umum, permasalahan utama yang dihadapi dalam pengendalian robot adalah masalah gerakan robot yang masih kurang halus dalam pergerakannya berhubungan
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Secara umum, permasalahan utama yang dihadapi dalam pengendalian robot adalah masalah gerakan robot yang masih kurang halus dalam pergerakannya berhubungan
BAB IV PENGUJIAN DAN ANALISIS
 BAB IV PENGUJIAN DAN ANALISIS Bab ini akan membahas mengenai pengujian dan analisis pada alat Pengendali Ketinggian Meja Otomatis Dengan Kontrol Smartphone Android Menggunakan Media Koneksi Bluetooth.
BAB IV PENGUJIAN DAN ANALISIS Bab ini akan membahas mengenai pengujian dan analisis pada alat Pengendali Ketinggian Meja Otomatis Dengan Kontrol Smartphone Android Menggunakan Media Koneksi Bluetooth.
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem pengendalian ketinggian air. 3.1. Gambaran Alat
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem pengendalian ketinggian air. 3.1. Gambaran Alat
Optimalisasi dan Perancangan Algoritma Pergerakan dan Komunikasi pada Robot Penyerang Humanoid Soccer
 Optimalisasi dan Perancangan Algoritma Pergerakan dan Komunikasi pada Robot Penyerang Humanoid Soccer Daniel Santoso 1, Deddy Susilo 2, Bob William Chandra 3 Program Studi Teknik Elektro, Fakultas Teknik
Optimalisasi dan Perancangan Algoritma Pergerakan dan Komunikasi pada Robot Penyerang Humanoid Soccer Daniel Santoso 1, Deddy Susilo 2, Bob William Chandra 3 Program Studi Teknik Elektro, Fakultas Teknik
(Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC)
") (Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC) Latar Belakang Tujuan Tugas Akhir merancang sistem pengendalian kecepatan pada mobil listrik 2 1 Mulai No Uji sistem Studi literatur Marancang
(Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC) Latar Belakang Tujuan Tugas Akhir merancang sistem pengendalian kecepatan pada mobil listrik 2 1 Mulai No Uji sistem Studi literatur Marancang
BAB I PENDAHULUAN. 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Saat ini segala sesuatu dalam kehidupan manusia bisa dikatakan bergantung pada teknologi yang ada, perkembangan teknologi komputerisasi telah mempengaruhi kehidupan
BAB I PENDAHULUAN 1.1 Latar Belakang Saat ini segala sesuatu dalam kehidupan manusia bisa dikatakan bergantung pada teknologi yang ada, perkembangan teknologi komputerisasi telah mempengaruhi kehidupan
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN A. Metode Penelitian Metode yang digunakan oleh penyusun dalam melakukan penelitian skripsi ini antara lain: 1. Studi Pustaka, yaitu dengan cara mencari, menggali dan mengkaji
BAB III METODE PENELITIAN A. Metode Penelitian Metode yang digunakan oleh penyusun dalam melakukan penelitian skripsi ini antara lain: 1. Studi Pustaka, yaitu dengan cara mencari, menggali dan mengkaji
BAB 4 IMPLEMENTASI DAN EVALUASI. Spesifikasi minimum dari perangkat keras yang diperlukan agar dapat. Graphic Card dengan memory minimum 64 mb
 BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Spesifikasi Driver 4.1.1 Spesifikasi Perangkat Keras Spesifikasi minimum dari perangkat keras yang diperlukan agar dapat menjalankan driver ini adalah: Prosesor Pentium
BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Spesifikasi Driver 4.1.1 Spesifikasi Perangkat Keras Spesifikasi minimum dari perangkat keras yang diperlukan agar dapat menjalankan driver ini adalah: Prosesor Pentium
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI. III, aspek keseluruhan dimulai dari Bab I hingga Bab III, maka dapat ditarik
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dibahs mengenai pengujian control reheat desuperheater yang telah dimodelkan pada matlab sebagaimana yang telah dibahas pada bab III, aspek
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dibahs mengenai pengujian control reheat desuperheater yang telah dimodelkan pada matlab sebagaimana yang telah dibahas pada bab III, aspek
Praktikum Sistem Kontrol Digital Eksperimen 3 : Kontrol PID
 Praktikum Sistem Kontrol Digital Eksperimen 3 : Kontrol PID Tujuan 1. Mempelajari konsep dan karakteristik PID (Proposional, Integral, Derivatif). 2. Membuat pemodelan PID menggunakan Scilab dan Xcos.
Praktikum Sistem Kontrol Digital Eksperimen 3 : Kontrol PID Tujuan 1. Mempelajari konsep dan karakteristik PID (Proposional, Integral, Derivatif). 2. Membuat pemodelan PID menggunakan Scilab dan Xcos.
SISTEM PENGENDALI PERLAMBATAN KECEPATAN MOTOR PADA ROBOT LINE FOLLOWER DENGAN SENSOR ULTRASONIK
 1 SISTEM PENGENDALI PERLAMBATAN KECEPATAN MOTOR PADA ROBOT LINE FOLLOWER DENGAN SENSOR ULTRASONIK Deaz Achmedo Giovanni Setyanoveka, Pembimbing 1: Ir. Purwanto, MT., Pembimbing 2: Ir. Bambang Siswoyo,
1 SISTEM PENGENDALI PERLAMBATAN KECEPATAN MOTOR PADA ROBOT LINE FOLLOWER DENGAN SENSOR ULTRASONIK Deaz Achmedo Giovanni Setyanoveka, Pembimbing 1: Ir. Purwanto, MT., Pembimbing 2: Ir. Bambang Siswoyo,
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan sistem home automation menggunakan teknologi NFC berbasis Arduino. Sistem home automation mengasumsikan peralatan listrik atau
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan sistem home automation menggunakan teknologi NFC berbasis Arduino. Sistem home automation mengasumsikan peralatan listrik atau
Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
 JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
BAB IV PENGUJIAN DAN ANALISA ALAT
 BAB IV PENGUJIAN DAN ANALISA ALAT 4.1 PENDAHULUAN Setelah proses rancangan selesai, maka pada bab ini akan dijelaskan mengenai persiapan komponen, peralatan yang dipergunakan, serta pengujian pada alat.
BAB IV PENGUJIAN DAN ANALISA ALAT 4.1 PENDAHULUAN Setelah proses rancangan selesai, maka pada bab ini akan dijelaskan mengenai persiapan komponen, peralatan yang dipergunakan, serta pengujian pada alat.
BAB 4 HASIL DAN PEMBAHASAN
 68 BAB 4 HASIL DAN PEMBAHASAN 4.1. Uji Algoritma Pengujian dilakukan untuk mendapatkan algoritma yang paling optimal dari segi kecepatan dan tingkat akurasi yang dapat berjalan secara real time pada smartphone
68 BAB 4 HASIL DAN PEMBAHASAN 4.1. Uji Algoritma Pengujian dilakukan untuk mendapatkan algoritma yang paling optimal dari segi kecepatan dan tingkat akurasi yang dapat berjalan secara real time pada smartphone
BAB 3 PERANCANGAN SISTEM. sederhana, ditunjukan pada blok diagram dibawah ini.
 BAB 3 PERANCANGAN SISTEM 3.1 Perangkat Keras Pada penelitian ini, menggunakan beberapa perangkat keras. Secara sederhana, ditunjukan pada blok diagram dibawah ini. Gambar 3.1 Blok Diagram Perangkat Keras
BAB 3 PERANCANGAN SISTEM 3.1 Perangkat Keras Pada penelitian ini, menggunakan beberapa perangkat keras. Secara sederhana, ditunjukan pada blok diagram dibawah ini. Gambar 3.1 Blok Diagram Perangkat Keras
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO
 KEMETERIA PEDIDIKA DA KEBUDAYAA UIVERSITAS BRAWIJAYA FAKULTAS TEKIK JURUSA TEKIK ELEKTRO Jalan MT Haryono 167 Telp & Fax. 0341 554166 Malang 65145 KODE PJ-01 PEGESAHA PUBLIKASI HASIL PEELITIA SKRIPSI JURUSA
KEMETERIA PEDIDIKA DA KEBUDAYAA UIVERSITAS BRAWIJAYA FAKULTAS TEKIK JURUSA TEKIK ELEKTRO Jalan MT Haryono 167 Telp & Fax. 0341 554166 Malang 65145 KODE PJ-01 PEGESAHA PUBLIKASI HASIL PEELITIA SKRIPSI JURUSA