Siswo Dwi Utomo. Dosen Pembimbing: Dr. Ir. Djoko Purwanto M.Eng Dr. Tri Arief Sardjono ST. MT
|
|
|
- Surya Muljana
- 6 tahun lalu
- Tontonan:
Transkripsi
1 Siswo Dwi Utomo Dosen Pembimbing: Dr. Ir. Djoko Purwanto M.Eng Dr. Tri Arief Sardjono ST. MT
2 PENDAHULUAN 1. Latar Belakang 2. Batasan Masalah 3. Tujuan
 Namun dalam prakteknya, tuning ketiga paramameter PID masih sulit dilakukan dan")
3 1. LATAR BELAKANG trial and error Kontroler PID merupakan kontroler yang sudah teruji keandalannya, 97 % industri memakai kontroler PID dan sudah diterapkan sejak 1930 an Salah satu kelebihan kontroler PID adalah sederhana, karena hanya bertumpu pada 3 parameter saja(proporsional, integral dan derivatif) Namun dalam prakteknya, tuning ketiga paramameter PID masih sulit dilakukan dan seringkali masih dengan cara trial and error
4 2. BATASAN MASALAH Mekanik dan kontroler robot menggunakan part LEGO Mindstorm NXT. Balancing robot yang digunakan mempunyai 2 roda kanan dan kiri Robot menggunakan satu buah gyro sensor single axisdan encoder motor untuk mendeteksi kemiringan Robot dapat berdiri tegak dengan 2 roda menggunakan kontroler auto tuning PID metode relay feedback
5 3. TUJUAN Auto tuning Mendesign balancing robot yang mampu berdiri tegak dan secara otomatis dapat menentukan sendiri parameter PID yang digunakan
6 DASAR TEORI 1. Konsep Balancing Robot 2. Struktur PID 3. Pseudocode PID Digital 4. Metode Relay Feedback
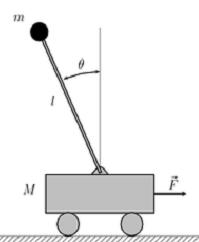
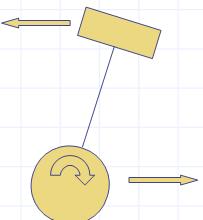
7 1. Konsep BalancingRobot
8 2. Struktur PID e=sp-pv e=u(t)t-y(t) Dependent Independent
9 3. Pseudocode PID Digital previous_error = 0 integral = 0 start: error = setpoint - actual_position integral = integral + (error*dt) derivative = (error - previous_error)/dt output=(kp*error)+(ki*integral)+(kd*derivt) previous_error = error wait(t) goto start
10 4. Metode Relay Feedback Ziegler-Nichols II
11 PERANCANGAN 1. Desain Mekanik Robot 2. Bagian-Bagian Robot 3. Arsitektur NXT Kontroler 4. Motor dan Encoder 5. Gyro Sensor 6. BrickCC NXC 7. Design Kontroler PID 8. Flowchart PID Manual 9. Auto Tuning Metode Relay Feedback 10. Flowchart Auto Tuning PID


12 1. Desain MekanikRobot Design menggunakan LEGO Minsdtorm NXT Software design menggunakan LDD (Lego Digital Designer) Bagian- bagian robot : - NXT Kontroler - Motor DC 2 buah - Roda 2 buah - HiTechnic Gyro sensor


13 2. Bagian-Bagian Robot LEGO Brick NXT Kontroler Motor Gyro sensor
14 3. Arsitektur NXT Kontroler ARM7 MCU merupakan mikrokontroler 32 bit sebagai kontroler utama(master) ATmega 48 MCU merupakan mikrokontroler 8 bit sebagai slave. Salah satu fungsinya adalah menghasilkan sinyal PWM untuk menjalankan motor, CSR BlueCore4 Bluetooth Radio untuk komunikasi dengan media bluetooth Loudspeaker dengan kualitas 8 Khz untuk aplikasi yang memerlukan suara Sumbertegangan6 bateraiaa USB downloader LCDgraphic100x64pixel Push Button


15 4. Motor dan Encoder Perbandingan gear box: 10:30:40 = 1:4 9:27 = 1:3 10:20 = 1:2 10:13:20 = 1:2 Total 1:48 Perbandingan antara gigi gear motor dan gigi gear encoder 32:10. Jadi untuk 1 putaran roda,gear encoder berputar sebanyak48 * 10/32 = 15x
 Number of Axis : 1 Filter : 10 Hz Dimensions : 29 x 18 x 29 mm Power supply")
16 5. Gyro Sensor Output : Analog DC voltage centered at about 2.5VDC Rate Range : +/-400 deg/sec Scale Factor : 20mV/(deg/sec) Number of Axis : 1 Filter : 10 Hz Dimensions : 29 x 18 x 29 mm Power supply (Vdd) : 5VDC +/-250mV Current dissipation : less than 50mA(150mA for initialization)


17 6. BrickCC NXC Software berbasiskan bahasa C khusus untuk segala jenis robot LEGO. BrickCC merupakan sofware open source

18 7. Design Kontroler PID Design awal dimulai dari design PID manual. Dari design awal dapat diketahui kinerja algoritma PID digital yang diterapkan ke robot. Sehingga untuk selanjutnya perlu ditambahkan proses auto tuning saja.
19 8. Flowchart PID Manual
20 9. Auto Tuning Metode Relay Feedback CO : Control Output PV : Variable Process Tu : ultimate periode Ku : gain ultimate h :outputrelaypeak topeak A :outputprosespeak topeak
21 10. Flowchart Auto Tuning PID
22 PENGUJIAN 1. Respon Gyroskop 2. Respon PID Manual 3. Respon Auto Tuning PID
23 1. Respon Gyroskop Dengan filter MAV, Tanpa gangguan dengan gangguan Saat stabil kecepan sudut gyro sensor sekitar 0.6 rad/s

24 2. Respon PID Manual


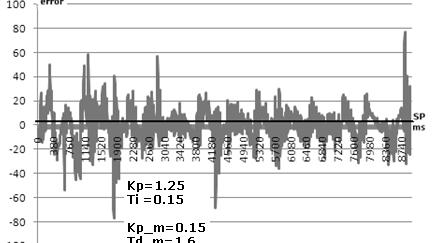
25 3. Respon Auto Tuning PID Gangguan dari luar berupa dorongan dorongan kecil pada body bagian depan dan belakang robot yang bertujuan mengguncang robot
26 Kesimpulan Pada Hi Technic gyro sensor terdapat rangkaian filter LPF 10 Hz, untuk membacanya diperlukan filter MAV dengan orde sebesar 5 untuk memperhalus data outputnya. Diperlukan 2 sensor untuk mengontrol balancing robot yaitu gyro sensor dengan penyimpangan sekitar 0.6 deg/s dan motor encoder dengan resolusi 2 derajat. Maksimum kemiringa robot adalah 20 derajat dari bidang tegak dan besar error maksimum yang masih bisa di handle oleh robot adalah deg/s Pada proses auto tuning jika nilai parameter awal sebesar Kp=10 dan Ti=10 menyebabkan robot terjatuh 3 kali sebelum menemukan parameter yang tepat. Jika parameter awal sebesar Kp=5 dan Ti=5 menyebabkan robot terjatuh 2 kali sebelum menemukan parameter yang tepat Parameter PID yang tepat adalah Kp=1, Ti=0.1.
27 TerimaKasih
Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID
 Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID 1 Ahmad Akhyar, Pembimbing 1: Purwanto, Pembimbing 2: Erni Yudaningtyas. Abstrak Alat penyiram tanaman yang sekarang
Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID 1 Ahmad Akhyar, Pembimbing 1: Purwanto, Pembimbing 2: Erni Yudaningtyas. Abstrak Alat penyiram tanaman yang sekarang
PERANCANGAN SISTEM KENDALI GERAKAN ROBOT BERODA TIGA UNTUK PEMBERSIH LANTAI
 PERANCANGAN SISTEM KENDALI GERAKAN ROBOT BERODA TIGA UNTUK PEMBERSIH LANTAI Muhammad Firman S. NRP 2210 030 005 Muchamad Rizqy NRP 2210 030 047 Dosen Pembimbing Ir. Rusdhianto Effendie AK, M.T NIP. 19570424
PERANCANGAN SISTEM KENDALI GERAKAN ROBOT BERODA TIGA UNTUK PEMBERSIH LANTAI Muhammad Firman S. NRP 2210 030 005 Muchamad Rizqy NRP 2210 030 047 Dosen Pembimbing Ir. Rusdhianto Effendie AK, M.T NIP. 19570424
DAFTAR ISI. SKRIPSI... ii
 DAFTAR ISI SKRIPSI... i SKRIPSI... ii PERNYATAAN... iii HALAMAN PENGESAHAN... iv KATA PENGANTAR... v DAFTAR ISI... vii DAFTAR GAMBAR... ix DAFTAR TABEL... xi INTISARI... xii ABSTRACT... xiii BAB I PENDAHULUAN...
DAFTAR ISI SKRIPSI... i SKRIPSI... ii PERNYATAAN... iii HALAMAN PENGESAHAN... iv KATA PENGANTAR... v DAFTAR ISI... vii DAFTAR GAMBAR... ix DAFTAR TABEL... xi INTISARI... xii ABSTRACT... xiii BAB I PENDAHULUAN...
BAB 4 IMPLEMENTASI DAN EVALUASI. (secara hardware).hasil implementasi akan dievaluasi untuk mengetahui apakah
.hasil implementasi akan dievaluasi untuk mengetahui apakah") BAB 4 IMPLEMENTASI DAN EVALUASI Pelaksanaan dari perancangan telah dibuat dan dijelaskan pada Bab 3, kemudian perancangan tersebut diimplementasi ke dalam bentuk yang nyata (secara hardware).hasil implementasi
BAB 4 IMPLEMENTASI DAN EVALUASI Pelaksanaan dari perancangan telah dibuat dan dijelaskan pada Bab 3, kemudian perancangan tersebut diimplementasi ke dalam bentuk yang nyata (secara hardware).hasil implementasi
CLOSED LOOP CONTROL MENGGUNAKAN ALGORITMA PID PADA LENGAN ROBOT DUA DERAJAT KEBEBASAN BERBASIS MIKROKONTROLER ATMEGA16
 CLOSED LOOP CONTROL MENGGUNAKAN ALGORITMA PID PADA LENGAN ROBOT DUA DERAJAT KEBEBASAN BERBASIS MIKROKONTROLER ATMEGA16 Diajukan Sebagai Salah Satu Syarat Menyelesaikan Program Studi S-1 Jurusan Teknik
CLOSED LOOP CONTROL MENGGUNAKAN ALGORITMA PID PADA LENGAN ROBOT DUA DERAJAT KEBEBASAN BERBASIS MIKROKONTROLER ATMEGA16 Diajukan Sebagai Salah Satu Syarat Menyelesaikan Program Studi S-1 Jurusan Teknik
BABV PENUTUP. Bab ini berisi kesimpulan yang diperoleh selama perancangan dan
 BABV PENUTUP Bab ini berisi kesimpulan yang diperoleh selama perancangan dan pembuatan skripsi yang beijudul "Robot yang Dapat Menyeimbangkan Badannya Dengan Hanya Bertumpu Pada Dua Buah Roda Sejajar yang
BABV PENUTUP Bab ini berisi kesimpulan yang diperoleh selama perancangan dan pembuatan skripsi yang beijudul "Robot yang Dapat Menyeimbangkan Badannya Dengan Hanya Bertumpu Pada Dua Buah Roda Sejajar yang
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID
 UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1.Analisa Masalah Dalam perancangan dan implementasi robot keseimbangan dengan menggunakan metode PID, terdapat beberapa masalah yang harus dipecahkan. Permasalahan
BAB III ANALISA DAN PERANCANGAN III.1.Analisa Masalah Dalam perancangan dan implementasi robot keseimbangan dengan menggunakan metode PID, terdapat beberapa masalah yang harus dipecahkan. Permasalahan
Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID
 1 Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID Rievqi Alghoffary, Pembimbing 1: Purwanto, Pembimbing 2: Bambang siswoyo. Abstrak Pengontrolan kecepatan pada alat
1 Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID Rievqi Alghoffary, Pembimbing 1: Purwanto, Pembimbing 2: Bambang siswoyo. Abstrak Pengontrolan kecepatan pada alat
IV. PERANCANGAN SISTEM
 SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
BAB IV PENGUJIAN DAN ANALISIS
 BAB IV PENGUJIAN DAN ANALISIS Pada bab ini akan dijelaskan mengenai pengujian dan analisis alat peraga sistem kendali pendulum terbalik yang meliputi pengujian dimensi mekanik, pengujian dimensi dan massa
BAB IV PENGUJIAN DAN ANALISIS Pada bab ini akan dijelaskan mengenai pengujian dan analisis alat peraga sistem kendali pendulum terbalik yang meliputi pengujian dimensi mekanik, pengujian dimensi dan massa
BAB I PENDAHULUAN. menggerakan belt conveyor, pengangkat beban, ataupun sebagai mesin
 1 BAB I PENDAHULUAN 1.1. Latar Belakang Motor DC atau motor arus searah yaitu motor yang sering digunakan di dunia industri, biasanya motor DC ini digunakan sebagai penggerak seperti untuk menggerakan
1 BAB I PENDAHULUAN 1.1. Latar Belakang Motor DC atau motor arus searah yaitu motor yang sering digunakan di dunia industri, biasanya motor DC ini digunakan sebagai penggerak seperti untuk menggerakan
SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI
 SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI Jourdan Septiansyah Efflan NRP. 2209100084 Dosen Pembimbing Ronny Mardiyanto, ST.,MT.,Ph.D. Ir. Djoko Purwanto,M.Eng.,Ph.D. JURUSAN
SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI Jourdan Septiansyah Efflan NRP. 2209100084 Dosen Pembimbing Ronny Mardiyanto, ST.,MT.,Ph.D. Ir. Djoko Purwanto,M.Eng.,Ph.D. JURUSAN
SISTEM PENGENDALI PERLAMBATAN KECEPATAN MOTOR PADA ROBOT LINE FOLLOWER DENGAN SENSOR ULTRASONIK
 1 SISTEM PENGENDALI PERLAMBATAN KECEPATAN MOTOR PADA ROBOT LINE FOLLOWER DENGAN SENSOR ULTRASONIK Deaz Achmedo Giovanni Setyanoveka, Pembimbing 1: Ir. Purwanto, MT., Pembimbing 2: Ir. Bambang Siswoyo,
1 SISTEM PENGENDALI PERLAMBATAN KECEPATAN MOTOR PADA ROBOT LINE FOLLOWER DENGAN SENSOR ULTRASONIK Deaz Achmedo Giovanni Setyanoveka, Pembimbing 1: Ir. Purwanto, MT., Pembimbing 2: Ir. Bambang Siswoyo,
IMPLEMENTASI SISTEM KESEIMBANGAN ROBOT BERODA DUA DENGAN MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DIFERENSIAL
 IMPLEMENTASI SISTEM KESEIMBANGAN ROBOT BERODA DUA DENGAN MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DIFERENSIAL Muhammad Miftahur Rokhmat Teknik Elektro Universitas Brawijaya Dosen Pembimbing: 1. Purwanto,
IMPLEMENTASI SISTEM KESEIMBANGAN ROBOT BERODA DUA DENGAN MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DIFERENSIAL Muhammad Miftahur Rokhmat Teknik Elektro Universitas Brawijaya Dosen Pembimbing: 1. Purwanto,
SISTEM KENDALI GERAK SEGWAY BERBASIS MIKROKONTROLER
 Sistem Kendali Gerak Segway Berbasis Mikrokontroler Lukas B. Setyawan, Deddy Susilo, Dede Irawan SISTEM KENDALI GERAK SEGWAY BERBASIS MIKROKONTROLER Lukas B. Setyawan 1, Deddy Susilo 2, Dede Irawan 3 Program
Sistem Kendali Gerak Segway Berbasis Mikrokontroler Lukas B. Setyawan, Deddy Susilo, Dede Irawan SISTEM KENDALI GERAK SEGWAY BERBASIS MIKROKONTROLER Lukas B. Setyawan 1, Deddy Susilo 2, Dede Irawan 3 Program
YONI WIDHI PRIHANA DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT.
 IMPLEMENTASI SENSOR KAPASITIF PADA SISTEM PENGERING GABAH OTOMATIS YONI WIDHI PRIHANA 2210100194 DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT. LATAR BELAKANG Indonesia merupakan
IMPLEMENTASI SENSOR KAPASITIF PADA SISTEM PENGERING GABAH OTOMATIS YONI WIDHI PRIHANA 2210100194 DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT. LATAR BELAKANG Indonesia merupakan
SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID
 SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID Raditya Wiradhana, Pembimbing 1: M. Aziz Muslim, Pembimbing 2: Purwanto. 1 Abstrak Pada saat ini masih banyak tungku bakar berbahan
SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID Raditya Wiradhana, Pembimbing 1: M. Aziz Muslim, Pembimbing 2: Purwanto. 1 Abstrak Pada saat ini masih banyak tungku bakar berbahan
3. Perancangan Alat Perancangan alat yaitu mendesain konsep yang sudah dibuat, meliputi perancangan mekanis robot, elektronis robot dan pemrograman
 BAB I Bab I merupakan pendahuluan usulan proyek akhir. Pendahuluan memaparkan latar belakang dan permasalahan dari proyek akhir serta tujuan dan manfaat yang diharapkan dari pelaksanaan proyek akhir. A.
BAB I Bab I merupakan pendahuluan usulan proyek akhir. Pendahuluan memaparkan latar belakang dan permasalahan dari proyek akhir serta tujuan dan manfaat yang diharapkan dari pelaksanaan proyek akhir. A.
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1. AnalisaMasalah Dalam perancangan robot penyeimbang menggunakan sensor jarakberbasis android, terdapatbeberapa masalah yang harus dipecahkan. Permasalahan tersebut
BAB III ANALISA DAN PERANCANGAN III.1. AnalisaMasalah Dalam perancangan robot penyeimbang menggunakan sensor jarakberbasis android, terdapatbeberapa masalah yang harus dipecahkan. Permasalahan tersebut
DAFTAR ISI. LEMBAR PENGESAHAN PEMBIMBING... Error! Bookmark not defined. LEMBAR PERNYATAAN KEASLIAN... iii. LEMBAR PENGESAHAN PENGUJI...
 DAFTAR ISI COVER...i LEMBAR PENGESAHAN PEMBIMBING... Error! Bookmark not defined. LEMBAR PERNYATAAN KEASLIAN... iii LEMBAR PENGESAHAN PENGUJI... iv HALAMAN PERSEMBAHAN... v HALAMAN MOTTO... vi KATA PENGANTAR...
DAFTAR ISI COVER...i LEMBAR PENGESAHAN PEMBIMBING... Error! Bookmark not defined. LEMBAR PERNYATAAN KEASLIAN... iii LEMBAR PENGESAHAN PENGUJI... iv HALAMAN PERSEMBAHAN... v HALAMAN MOTTO... vi KATA PENGANTAR...
Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC
 Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC Andhyka Vireza, M. Aziz Muslim, Goegoes Dwi N. 1 Abstrak Kontroler PID akan berjalan dengan baik jika mendapatkan tuning
Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC Andhyka Vireza, M. Aziz Muslim, Goegoes Dwi N. 1 Abstrak Kontroler PID akan berjalan dengan baik jika mendapatkan tuning
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api
 Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
BAB II SISTEM KENDALI GERAK SEGWAY
 BAB II SISTEM KENDALI GERAK SEGWAY Sistem merupakan suatu rangkaian beberapa organ yang menjadi satu kesatuan. Maka sistem kendali gerak adalah suatu sistem yang terdiri dari beberapa komponen pengendali
BAB II SISTEM KENDALI GERAK SEGWAY Sistem merupakan suatu rangkaian beberapa organ yang menjadi satu kesatuan. Maka sistem kendali gerak adalah suatu sistem yang terdiri dari beberapa komponen pengendali
BAB III ANALISIS DAN DESAIN SISTEM
 BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan dan implementasi wajah animatronik berbasis mikrokontroler ini menggunakan beberapa metode rancang bangun yang pembuatannya
BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan dan implementasi wajah animatronik berbasis mikrokontroler ini menggunakan beberapa metode rancang bangun yang pembuatannya
PERANCANGAN PENGENDALI POSISI LINIER UNTUK MOTOR DC DENGAN MENGGUNAKAN PID
 PERANCANGAN PENGENDALI POSISI LINIER UNTUK MOTOR DC DENGAN MENGGUNAKAN PID Endra 1 ; Nazar Nazwan 2 ; Dwi Baskoro 3 ; Filian Demi Kusumah 4 1 Jurusan Sistem Komputer, Fakultas Ilmu Komputer, Universitas
PERANCANGAN PENGENDALI POSISI LINIER UNTUK MOTOR DC DENGAN MENGGUNAKAN PID Endra 1 ; Nazar Nazwan 2 ; Dwi Baskoro 3 ; Filian Demi Kusumah 4 1 Jurusan Sistem Komputer, Fakultas Ilmu Komputer, Universitas
Pengontrol PID pada Robot Beroda untuk Kontes Robot Cerdas Indonesia
 18 ISSN 1979-2867 (print) Electrical Engineering Journal Vol. 4 (2013) No. 1, pp. 18-33 Pengontrol PID pada Robot Beroda untuk Kontes Robot Cerdas Indonesia E. Merry Sartika dan Rocky Anthony Jurusan Teknik
18 ISSN 1979-2867 (print) Electrical Engineering Journal Vol. 4 (2013) No. 1, pp. 18-33 Pengontrol PID pada Robot Beroda untuk Kontes Robot Cerdas Indonesia E. Merry Sartika dan Rocky Anthony Jurusan Teknik
Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID
 Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID Arga Rifky Nugraha, Pembimbing 1: Rahmadwati, Pembimbing 2: Retnowati. 1 Abstrak Pengontrolan kecepatan pada
Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID Arga Rifky Nugraha, Pembimbing 1: Rahmadwati, Pembimbing 2: Retnowati. 1 Abstrak Pengontrolan kecepatan pada
BAB III ANALISIS DAN DESAIN SISTEM
 BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan dan implementasi jari animatronik berbasis mikrokontroler ini menggunakan beberapa metode rancang bangun yang pembuatannya terdapat
BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan dan implementasi jari animatronik berbasis mikrokontroler ini menggunakan beberapa metode rancang bangun yang pembuatannya terdapat
PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI PID SEBAGAI PENGONTROL KECEPATAN ROBOT MOBIL PADA LINTASAN DATAR, TANJAKAN, DAN TURUNAN TUGAS AKHIR
 PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI PID SEBAGAI PENGONTROL KECEPATAN ROBOT MOBIL PADA LINTASAN DATAR, TANJAKAN, DAN TURUNAN TUGAS AKHIR Oleh : Imil Hamda Imran NIM : 06175062 Pembimbing I : Ir.
PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI PID SEBAGAI PENGONTROL KECEPATAN ROBOT MOBIL PADA LINTASAN DATAR, TANJAKAN, DAN TURUNAN TUGAS AKHIR Oleh : Imil Hamda Imran NIM : 06175062 Pembimbing I : Ir.
BAB IV PENGUJIAN ALAT DAN ANALISA
 BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
Oleh : Dia Putranto Harmay Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc
 Oleh : Dia Putranto Harmay 2105.100.145 Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc Latar Belakang Usman Awan dkk, 2001 Merancang dan membuat dynamometer jenis prony brake dengan menggunakan strain gauge
Oleh : Dia Putranto Harmay 2105.100.145 Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc Latar Belakang Usman Awan dkk, 2001 Merancang dan membuat dynamometer jenis prony brake dengan menggunakan strain gauge
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA Sudah menjadi trend saat ini bahwa pengendali suatu alat sudah banyak yang diaplikasikan secara otomatis, hal ini merupakan salah satu penerapan dari perkembangan teknologi dalam
BAB II TINJAUAN PUSTAKA Sudah menjadi trend saat ini bahwa pengendali suatu alat sudah banyak yang diaplikasikan secara otomatis, hal ini merupakan salah satu penerapan dari perkembangan teknologi dalam
DAFTAR ISI. Halaman Judul. Lembar Pengesahan Pembimbing. Lembar Pengesahan Penguji. Halaman Persembahan. Halaman Motto. Kata Pengantar.
 DAFTAR ISI Halaman Judul Lembar Pengesahan Pembimbing Lembar Pengesahan Penguji Halaman Persembahan Halaman Motto Kata Pengantar Abstraksi Daftar Isi Daftar Gambar Daftar Tabel i ii iii iv v vi ix x xiv
DAFTAR ISI Halaman Judul Lembar Pengesahan Pembimbing Lembar Pengesahan Penguji Halaman Persembahan Halaman Motto Kata Pengantar Abstraksi Daftar Isi Daftar Gambar Daftar Tabel i ii iii iv v vi ix x xiv
BAB IV PENGUJIAN SISTEM DAN ANALISIS
 BAB IV PENGUJIAN SISTEM DAN ANALISIS Pada bab ini akan ditampilkan dan penjelasannya mengenai pengujian sistem dan dokumuentasi data-data percobaan yang telah direalisasikan sesuai dengan spesifikasi yang
BAB IV PENGUJIAN SISTEM DAN ANALISIS Pada bab ini akan ditampilkan dan penjelasannya mengenai pengujian sistem dan dokumuentasi data-data percobaan yang telah direalisasikan sesuai dengan spesifikasi yang
PENGESAHAN PUBLIKASI HASIL PENELITIAN SKRIPSI JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS BRAWIJAYA
 KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO Jalan MT Haryono 67 Telp & Fax. 5566 Malang 655 KODE PJ- PENGESAHAN PUBLIKASI HASIL PENELITIAN SKRIPSI
KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO Jalan MT Haryono 67 Telp & Fax. 5566 Malang 655 KODE PJ- PENGESAHAN PUBLIKASI HASIL PENELITIAN SKRIPSI
BAB IV PENGUJIAN DAN ANALISIS SISTEM. didapat suatu sistem yang dapat mengendalikan mobile robot dengan PID
 BAB IV PENGUJIAN DAN ANALISIS SISTEM Pada bab ini akan dibahas hasil analisa pengujian yang telah dilakukan, pengujian dilakukan dalam beberapa bagian yang disusun dalam urutan dari yang sederhana menuju
BAB IV PENGUJIAN DAN ANALISIS SISTEM Pada bab ini akan dibahas hasil analisa pengujian yang telah dilakukan, pengujian dilakukan dalam beberapa bagian yang disusun dalam urutan dari yang sederhana menuju
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan industri skala kecil hingga skala besar di berbagai negara di belahan dunia saat ini tidak terlepas dari pemanfaatan mesin-mesin industri sebagai alat
BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan industri skala kecil hingga skala besar di berbagai negara di belahan dunia saat ini tidak terlepas dari pemanfaatan mesin-mesin industri sebagai alat
IMPLEMENTASI ROBOT THREE OMNI-DIRECTIONAL MENGGUNAKAN KONTROLER PID PADA ROBOT KONTES ROBOT ABU INDONESIA (KRAI)
") IMPLEMENTASI ROBOT THREE OMNI-DIRECTIONAL MENGGUNAKAN KONTROLER PID PADA ROBOT KONTES ROBOT ABU INDONESIA (KRAI) Publikasi Jurnal Skripsi Disusun Oleh : RADITYA ARTHA ROCHMANTO NIM : 916317-63 KEMENTERIAN
IMPLEMENTASI ROBOT THREE OMNI-DIRECTIONAL MENGGUNAKAN KONTROLER PID PADA ROBOT KONTES ROBOT ABU INDONESIA (KRAI) Publikasi Jurnal Skripsi Disusun Oleh : RADITYA ARTHA ROCHMANTO NIM : 916317-63 KEMENTERIAN
REALISASI PROTOTIPE KURSI RODA LISTRIK DENGAN PENGONTROL PID
 REALISASI PROTOTIPE KURSI RODA LISTRIK DENGAN PENGONTROL PID Disusun Oleh: Samuel Natanto Herlendra 0422031 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha, Jl. Prof.Drg.Suria Sumantri,
REALISASI PROTOTIPE KURSI RODA LISTRIK DENGAN PENGONTROL PID Disusun Oleh: Samuel Natanto Herlendra 0422031 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha, Jl. Prof.Drg.Suria Sumantri,
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan
IMPLEMENTASI KONTROL LOGIKA FUZZY PADA SISTEM KESETIMBANGAN ROBOT BERODA DUA
 IMPLEMENTASI KONTROL LOGIKA FUZZY PADA SISTEM KESETIMBANGAN ROBOT BERODA DUA Shanty Puspitasari¹, Gugus Dwi Nusantoro, ST., MT 2., M. Aziz Muslim, ST., MT., Ph.D 3, ¹Mahasiswa Teknik Elektro. 2 Dosen Teknik
IMPLEMENTASI KONTROL LOGIKA FUZZY PADA SISTEM KESETIMBANGAN ROBOT BERODA DUA Shanty Puspitasari¹, Gugus Dwi Nusantoro, ST., MT 2., M. Aziz Muslim, ST., MT., Ph.D 3, ¹Mahasiswa Teknik Elektro. 2 Dosen Teknik
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Di era globalisasi sekarang ini teknologi dan informasi semakin berkembang pesat, begitu juga teknologi robot. Robotika merupakan bidang teknologi yang mengalami banyak
BAB 1 PENDAHULUAN 1.1 Latar Belakang Di era globalisasi sekarang ini teknologi dan informasi semakin berkembang pesat, begitu juga teknologi robot. Robotika merupakan bidang teknologi yang mengalami banyak
SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560
 1 SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560 Adityan Ilmawan Putra, Pembimbing 1: Purwanto, Pembimbing 2: Bambang Siswojo.
1 SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560 Adityan Ilmawan Putra, Pembimbing 1: Purwanto, Pembimbing 2: Bambang Siswojo.
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI Bab ini berisi landasan-landasan teori yang penulis gunakan untuk seluruh laporan penelitian ini. Landasan-landasan teori ini dijelaskan untuk membentuk pemahaman yang sama antara
BAB 2 LANDASAN TEORI Bab ini berisi landasan-landasan teori yang penulis gunakan untuk seluruh laporan penelitian ini. Landasan-landasan teori ini dijelaskan untuk membentuk pemahaman yang sama antara
BAB 1 PENDAHULUAN. Video shooting adalah serangkaian kegiatan pengambilan gambar bergerak
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Video shooting adalah serangkaian kegiatan pengambilan gambar bergerak dan suara secara bersamaan menggunakan kamera video yang dilakukan secara digital maupun analog.
BAB 1 PENDAHULUAN 1.1 Latar Belakang Video shooting adalah serangkaian kegiatan pengambilan gambar bergerak dan suara secara bersamaan menggunakan kamera video yang dilakukan secara digital maupun analog.
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi robotika saat ini telah mampu berperan dalam membantu aktifitas kehidupan manusia serta mampu meningkatkan kualitas maupun kuantitas berbagai
BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi robotika saat ini telah mampu berperan dalam membantu aktifitas kehidupan manusia serta mampu meningkatkan kualitas maupun kuantitas berbagai
TUNING KONTROL PID LINE FOLLOWER. Dari blok diagram diatas dapat q jelasin sebagai berikut
 TUNING KONTROL PID LINE FOLLOWER Tunning kontrol PID ini bertujuan untuk menentukan paramater aksi kontrol Proportional, Integratif, Derivatif pada robot line follower. Proses ini dapat dilakukan dengan
TUNING KONTROL PID LINE FOLLOWER Tunning kontrol PID ini bertujuan untuk menentukan paramater aksi kontrol Proportional, Integratif, Derivatif pada robot line follower. Proses ini dapat dilakukan dengan
Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno
 1 Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno Anggara Truna Negara, Pembimbing 1: Retnowati, Pembimbing 2: Rahmadwati. Abstrak Perancangan alat fermentasi kakao otomatis
1 Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno Anggara Truna Negara, Pembimbing 1: Retnowati, Pembimbing 2: Rahmadwati. Abstrak Perancangan alat fermentasi kakao otomatis
BAB 3 PERANCANGAN SISTEM
 BAB 3 PERANCANGAN SISTEM 3.1 Perancangan Sistem Secara Umum Sistem pada penelitian ini akan menyeimbangkan posisi penampang robot dengan mengenal perubahan posisi dan kemudian mengatur kecepatan. Setiap
BAB 3 PERANCANGAN SISTEM 3.1 Perancangan Sistem Secara Umum Sistem pada penelitian ini akan menyeimbangkan posisi penampang robot dengan mengenal perubahan posisi dan kemudian mengatur kecepatan. Setiap
BAB I PENDAHULUAN. suatu lingkungan tertentu. Mobile-robot tidak seperti manipulator robot yang
 BAB I PENDAHULUAN 1.1. Latar Belakang dan Rumusan Masalah 1.1.1. Latar belakang Mobile-robot adalah suatu mesin otomatis yang dapat bergerak dalam suatu lingkungan tertentu. Mobile-robot tidak seperti
BAB I PENDAHULUAN 1.1. Latar Belakang dan Rumusan Masalah 1.1.1. Latar belakang Mobile-robot adalah suatu mesin otomatis yang dapat bergerak dalam suatu lingkungan tertentu. Mobile-robot tidak seperti
PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO. Else Orlanda Merti Wijaya.
 PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO Else Orlanda Merti Wijaya S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : elsewijaya@mhs.unesa.ac.id
PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO Else Orlanda Merti Wijaya S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : elsewijaya@mhs.unesa.ac.id
Rancang Bangun Sistem Takeoff Unmanned Aerial Vehicle Quadrotor Berbasis Sensor Jarak Inframerah
 JURNAL TEKNIK ITS Vol. 1, No. 1 (Sept. 2012) ISSN: 2301-9271 F-50 Rancang Bangun Sistem Takeoff Unmanned Aerial Vehicle Quadrotor Berbasis Sensor Jarak Inframerah Bardo Wenang, Rudy Dikairono, ST., MT.,
JURNAL TEKNIK ITS Vol. 1, No. 1 (Sept. 2012) ISSN: 2301-9271 F-50 Rancang Bangun Sistem Takeoff Unmanned Aerial Vehicle Quadrotor Berbasis Sensor Jarak Inframerah Bardo Wenang, Rudy Dikairono, ST., MT.,
BAB IV ANALISA DAN PENGUJIAN ALAT
 BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Umum Robot merupakan kesatuan kerja dari semua kerja perangkat penyusunnya. Perancangan robot dimulai dengan menggali informasi dari berbagai referensi, temukan ide,
BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Umum Robot merupakan kesatuan kerja dari semua kerja perangkat penyusunnya. Perancangan robot dimulai dengan menggali informasi dari berbagai referensi, temukan ide,
Pengendalian Gerak Robot Penghindar Halangan Menggunakan Citra dengan Kontrol PID
 Journal of Electrical Electronic Control and Automotive Engineering (JEECAE) Pengendalian Gerak Robot Penghindar Halangan Menggunakan Citra dengan Kontrol PID Basuki Winarno, S.T., M.T. Jurusan Teknik
Journal of Electrical Electronic Control and Automotive Engineering (JEECAE) Pengendalian Gerak Robot Penghindar Halangan Menggunakan Citra dengan Kontrol PID Basuki Winarno, S.T., M.T. Jurusan Teknik
PENGATURAN KUAT CAHAYA PADA SOLATUBE MENGGUNAKAN KONTROLER PID BERBASIS MIKROKONTROLER
 PENGATURAN KUAT CAHAYA PADA SOLATUBE MENGGUNAKAN KONTROLER PID BERBASIS MIKROKONTROLER Firman Dewan Saputra. 1, Dr. Ir. Purwanto, MT. 2, Ir. Retnowati, MT. 2 1 Mahasiswa Teknik Elektro Univ. Brawijaya,
PENGATURAN KUAT CAHAYA PADA SOLATUBE MENGGUNAKAN KONTROLER PID BERBASIS MIKROKONTROLER Firman Dewan Saputra. 1, Dr. Ir. Purwanto, MT. 2, Ir. Retnowati, MT. 2 1 Mahasiswa Teknik Elektro Univ. Brawijaya,
IMPLEMENTASI KONTROLER PID PADA TWO WHEELS SELF BALANCING ROBOT BERBASIS ARDUINO UNO
 Implementasi Kontroler PID Pada Two Wheels Self Balancing Robot Berbasis Arduino UNO IMPLEMENTASI KONTROLER PID PADA TWO WHEELS SELF BALANCING ROBOT BERBASIS ARDUINO UNO Raranda S1 Teknik Elektro, Fakultas
Implementasi Kontroler PID Pada Two Wheels Self Balancing Robot Berbasis Arduino UNO IMPLEMENTASI KONTROLER PID PADA TWO WHEELS SELF BALANCING ROBOT BERBASIS ARDUINO UNO Raranda S1 Teknik Elektro, Fakultas
BAB II DASAR TEORI. Gambar 2.1 Sensor Ultrasonik HCSR04. Gambar 2.2 Cara Kerja Sensor Ultrasonik.
 BAB II DASAR TEORI Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem. Teori-teori yang digunakan dalam pembuatan skripsi ini terdiri dari sensor
BAB II DASAR TEORI Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem. Teori-teori yang digunakan dalam pembuatan skripsi ini terdiri dari sensor
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai gambaran alat, perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem kendali pendulum terbalik. 3.1.
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai gambaran alat, perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem kendali pendulum terbalik. 3.1.
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini menjelaskan tentang perancangan sistem alarm kebakaran menggunakan Arduino Uno dengan mikrokontroller ATmega 328. yang meliputi perancangan perangkat keras (hardware)
BAB III PERANCANGAN ALAT Pada bab ini menjelaskan tentang perancangan sistem alarm kebakaran menggunakan Arduino Uno dengan mikrokontroller ATmega 328. yang meliputi perancangan perangkat keras (hardware)
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas mengenai proses perancangan mekanik pembersih lantai otomatis serta penyusunan rangkaian untuk merealisasikan sistem alat. Dalam hal ini
BAB III PERANCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas mengenai proses perancangan mekanik pembersih lantai otomatis serta penyusunan rangkaian untuk merealisasikan sistem alat. Dalam hal ini
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Pendahuluan Bab ini akan membahas pembuatan seluruh perangkat yang ada pada Tugas Akhir tersebut. Secara garis besar dibagi atas dua bagian perangkat yaitu: 1.
BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Pendahuluan Bab ini akan membahas pembuatan seluruh perangkat yang ada pada Tugas Akhir tersebut. Secara garis besar dibagi atas dua bagian perangkat yaitu: 1.
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
BAB 3 PERANCANGAN KONTROL DENGAN PID TUNING
 8 BAB 3 PERANCANGAN KONTROL DENGAN PID TUNING 3. Algoritma Kontrol Pada Pesawat Tanpa Awak Pada makalah seminar dari penulis dengan judul Pemodelan dan Simulasi Gerak Sirip Pada Pesawat Tanpa Awak telah
8 BAB 3 PERANCANGAN KONTROL DENGAN PID TUNING 3. Algoritma Kontrol Pada Pesawat Tanpa Awak Pada makalah seminar dari penulis dengan judul Pemodelan dan Simulasi Gerak Sirip Pada Pesawat Tanpa Awak telah
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 2.1. Mikrokontroller AVR Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan serta keluaran serta dapat di read dan write dengan cara khusus. Mikrokontroller
BAB 2 LANDASAN TEORI 2.1. Mikrokontroller AVR Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan serta keluaran serta dapat di read dan write dengan cara khusus. Mikrokontroller
MINIATUR ALAT PENGENDALI SUHU RUANG PENGOVENAN BODY MOBIL MENGGUNAKAN KONTROLER PID BERBASIS PLC DENGAN SISTEM CASCADE
 MINIATUR ALAT PENGENDALI SUHU RUANG PENGOVENAN BODY MOBIL MENGGUNAKAN KONTROLER PID BERBASIS PLC DENGAN SISTEM CASCADE Dimas Okta Ardiansyah 1, Ir. Purwanto., MT 2, Ir.Bambang S.,MT 3. 1 Mahasiswa Teknik
MINIATUR ALAT PENGENDALI SUHU RUANG PENGOVENAN BODY MOBIL MENGGUNAKAN KONTROLER PID BERBASIS PLC DENGAN SISTEM CASCADE Dimas Okta Ardiansyah 1, Ir. Purwanto., MT 2, Ir.Bambang S.,MT 3. 1 Mahasiswa Teknik
BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM. kelembaban di dalam rumah kaca (greenhouse), dengan memonitor perubahan suhu
, dengan memonitor perubahan suhu") BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM 3.1 Metode Penelitian Metode yang digunakan pada penelitian ini adalah cara mengatur suhu dan kelembaban di dalam rumah kaca (greenhouse), dengan memonitor
BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM 3.1 Metode Penelitian Metode yang digunakan pada penelitian ini adalah cara mengatur suhu dan kelembaban di dalam rumah kaca (greenhouse), dengan memonitor
IMPLEMENTASI SENSOR KAPASITIF DALAM SISTEM KONTROL KADAR ETANOL
 TE 091399 IMPLEMENTASI SENSOR KAPASITIF DALAM SISTEM KONTROL KADAR ETANOL Peter Chondro 2210100136 Dosen Pembimbing: Dr. M. Rivai, ST., MT. Suwito, ST., MT. Bidang Studi Elektronika Jurusan Teknik Elektro
TE 091399 IMPLEMENTASI SENSOR KAPASITIF DALAM SISTEM KONTROL KADAR ETANOL Peter Chondro 2210100136 Dosen Pembimbing: Dr. M. Rivai, ST., MT. Suwito, ST., MT. Bidang Studi Elektronika Jurusan Teknik Elektro
BAB III ANALISIS MASALAH DAN RANCANGAN ALAT
 BAB III ANALISIS MASALAH DAN RANCANGAN ALAT III.1. Analisa Permasalahan Masalah yang dihadapi adalah bagaimana untuk menetaskan telur ayam dalam jumlah banyak dan dalam waktu yang bersamaan. Karena kemampuan
BAB III ANALISIS MASALAH DAN RANCANGAN ALAT III.1. Analisa Permasalahan Masalah yang dihadapi adalah bagaimana untuk menetaskan telur ayam dalam jumlah banyak dan dalam waktu yang bersamaan. Karena kemampuan
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 2.1 Pengenalan Pengaturan keseimbangan robot merupakan suatu cara agar robot dapat setimbang. Dengan menggunakan 2 roda maka akan lebih efisien dalam hal material dan juga karena tidak
BAB 2 LANDASAN TEORI 2.1 Pengenalan Pengaturan keseimbangan robot merupakan suatu cara agar robot dapat setimbang. Dengan menggunakan 2 roda maka akan lebih efisien dalam hal material dan juga karena tidak
SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8
 SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8 I Nyoman Benny Rismawan 1, Cok Gede Indra Partha 2, Yoga Divayana 3 Jurusan Teknik Elektro, Fakultas Teknik Universitas
SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8 I Nyoman Benny Rismawan 1, Cok Gede Indra Partha 2, Yoga Divayana 3 Jurusan Teknik Elektro, Fakultas Teknik Universitas
RANCANG BANGUN ROBOT PENYEIMBANG BERBASIS ANDROID
 1 RANCANG BANGUN ROBOT PENYEIMBANG BERBASIS ANDROID Pardomuan Lumbantoruan 1), Elang Derdian M 2), Aryanto Hartoyo 3) Jurusan Teknik Elektro, Fakultas Teknik, Universitas Tanjungpura e-mail : Pardomuanlumbantoruan@yahoo.com
1 RANCANG BANGUN ROBOT PENYEIMBANG BERBASIS ANDROID Pardomuan Lumbantoruan 1), Elang Derdian M 2), Aryanto Hartoyo 3) Jurusan Teknik Elektro, Fakultas Teknik, Universitas Tanjungpura e-mail : Pardomuanlumbantoruan@yahoo.com
RANCANG BANGUN SIMULATOR PENGENDALIAN POSISI CANNON PADA MODEL TANK MILITER DENGAN PENGENDALI PD (PROPOSIONAL DERIVATIVE)
") Makalah Seminar Tugas Akhir RANCANG BANGUN SIMULATOR PENGENDALIAN POSISI CANNON PADA MODEL TANK MILITER DENGAN PENGENDALI PD (PROPOSIONAL DERIVATIVE) Heru Triwibowo [1], Iwan Setiawan [2], Budi Setiyono
Makalah Seminar Tugas Akhir RANCANG BANGUN SIMULATOR PENGENDALIAN POSISI CANNON PADA MODEL TANK MILITER DENGAN PENGENDALI PD (PROPOSIONAL DERIVATIVE) Heru Triwibowo [1], Iwan Setiawan [2], Budi Setiyono
(Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC)
") (Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC) Latar Belakang Tujuan Tugas Akhir merancang sistem pengendalian kecepatan pada mobil listrik 2 1 Mulai No Uji sistem Studi literatur Marancang
(Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC) Latar Belakang Tujuan Tugas Akhir merancang sistem pengendalian kecepatan pada mobil listrik 2 1 Mulai No Uji sistem Studi literatur Marancang
PENGENDALIAN SUDUT CERMIN DATAR PADA SOLATUBE MENGGUNAKAN KONTROLER PID BERBASIS MIKROKONTROLER
 PENGENDALIAN SUDUT CERMIN DATAR PADA SOLATUBE MENGGUNAKAN KONTROLER PID BERBASIS MIKROKONTROLER Gumilang Saptha Pamega. 1, Ir. Purwanto, MT. 2, M. Aziz Muslim, ST., MT., Ph.D. 2 1 Mahasiswa Teknik Elektro
PENGENDALIAN SUDUT CERMIN DATAR PADA SOLATUBE MENGGUNAKAN KONTROLER PID BERBASIS MIKROKONTROLER Gumilang Saptha Pamega. 1, Ir. Purwanto, MT. 2, M. Aziz Muslim, ST., MT., Ph.D. 2 1 Mahasiswa Teknik Elektro
BAB I PENDAHULUAN. Motor listrik adalah mesin listrik yang mengubah energi listrik ke energi
 BAB I PENDAHULUAN 1.1. Latar Belakang Motor listrik adalah mesin listrik yang mengubah energi listrik ke energi mekanik. Motor listrik merupakan salah satu realisasi dari kaidah gaya Lorentz. Apabila muatan
BAB I PENDAHULUAN 1.1. Latar Belakang Motor listrik adalah mesin listrik yang mengubah energi listrik ke energi mekanik. Motor listrik merupakan salah satu realisasi dari kaidah gaya Lorentz. Apabila muatan
pengendali Konvensional Time invariant P Proportional Kp
 Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
TUGAS AKHIR ROBOT PEMBERSIH LANTAI OTOMATIS BERBASIS ARDUINO UNO DENGAN SENSOR ULTRASONIK
 TUGAS AKHIR ROBOT PEMBERSIH LANTAI OTOMATIS BERBASIS ARDUINO UNO DENGAN SENSOR ULTRASONIK Diajukan untuk melengkapi sebagian syarat dalam mencapai Gelar Sarjana Strata Satu (S1) Disusun oleh : Nama : Umi
TUGAS AKHIR ROBOT PEMBERSIH LANTAI OTOMATIS BERBASIS ARDUINO UNO DENGAN SENSOR ULTRASONIK Diajukan untuk melengkapi sebagian syarat dalam mencapai Gelar Sarjana Strata Satu (S1) Disusun oleh : Nama : Umi
BAB IV PENGUJIAN DAN ANALISA RANGKAIAN
 BAB IV PENGUJIAN DAN ANALISA RANGKAIAN Dalam bab ini penulis akan mengungkapkan dan menguraikan mengenai persiapan komponen dan peralatan yang dipergunakan serta langkah langkah praktek, kemudian menyiapkan
BAB IV PENGUJIAN DAN ANALISA RANGKAIAN Dalam bab ini penulis akan mengungkapkan dan menguraikan mengenai persiapan komponen dan peralatan yang dipergunakan serta langkah langkah praktek, kemudian menyiapkan
BAB I PENDAHULUAN. Kegiatan videografi saat ini sangat dituntut untuk dapat menghasilkan
 BAB I PENDAHULUAN 1.1 Latar Belakang Kegiatan videografi saat ini sangat dituntut untuk dapat menghasilkan gambar atau rekaman video yang rapi dan stabil. Namun untuk menghasilkan rekaman video yang stabil
BAB I PENDAHULUAN 1.1 Latar Belakang Kegiatan videografi saat ini sangat dituntut untuk dapat menghasilkan gambar atau rekaman video yang rapi dan stabil. Namun untuk menghasilkan rekaman video yang stabil
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas mengenai proses perancangan mekanik gorden dan lampu otomatis serta penyusunan rangkaian untuk merealisasikan sistem alat. Dalam hal ini
BAB III PERANCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas mengenai proses perancangan mekanik gorden dan lampu otomatis serta penyusunan rangkaian untuk merealisasikan sistem alat. Dalam hal ini
Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
 JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
BAB IV PENGUJIAN SISTEM. Pengujian minimum system bertujuan untuk mengetahui apakah minimum
 BAB IV PENGUJIAN SISTEM Pengujian sistem yang dilakukan penulis merupakan pengujian terhadap perangkat keras dan.perangkat lunak dari sistem secara keseluruhan yang telah selesai dibuat untuk mengetahui
BAB IV PENGUJIAN SISTEM Pengujian sistem yang dilakukan penulis merupakan pengujian terhadap perangkat keras dan.perangkat lunak dari sistem secara keseluruhan yang telah selesai dibuat untuk mengetahui
BAB I PENDAHULUAN. mampu membantu manusia menyelesaikan pekerjaannya. Selain itu, robot otomatis juga dapat
 BAB I PENDAHULUAN I.1. Latar Belakang Dalam menunjang produktivitas pekerjaan, manusia telah lama menginginkan sebuah asisten pribadi yang mampu melakukan beberapa tugas. Asisten berupa robot otomatis
BAB I PENDAHULUAN I.1. Latar Belakang Dalam menunjang produktivitas pekerjaan, manusia telah lama menginginkan sebuah asisten pribadi yang mampu melakukan beberapa tugas. Asisten berupa robot otomatis
III. METODE PENELITIAN. dari bulan November 2014 s/d Desember Alat dan bahan yang digunakan dalam perancangan Catu Daya DC ini yaitu :
 III. METODE PENELITIAN 3.1. Waktu dan Tempat Penelitian Penelitian tugas akhir ini dilakukan di laboratorium Teknik Kendali Jurusan Teknik Elektro, Fakultas Teknik, Universitas Lampung yang dilaksanakan
III. METODE PENELITIAN 3.1. Waktu dan Tempat Penelitian Penelitian tugas akhir ini dilakukan di laboratorium Teknik Kendali Jurusan Teknik Elektro, Fakultas Teknik, Universitas Lampung yang dilaksanakan
BAB IV PENGUJIAN DAN ANALISA
 BAB IV PENGUJIAN DAN ANALISA 4.1 Umum Perancangan robot merupakan aplikasi dari ilmu tentang robotika yang diketahui. Kinerja alat tersebut dapat berjalan sesuai keinginan kita dengan apa yang kita rancang.
BAB IV PENGUJIAN DAN ANALISA 4.1 Umum Perancangan robot merupakan aplikasi dari ilmu tentang robotika yang diketahui. Kinerja alat tersebut dapat berjalan sesuai keinginan kita dengan apa yang kita rancang.
SISTEM PENGENDALIAN SUHU PADA PROSES DISTILASI VAKUM BIOETANOL DENGAN MENGGUNAKAN ARDUINO
 1 SISTEM PENGENDALIAN SUHU PADA PROSES DISTILASI VAKUM BIOETANOL DENGAN MENGGUNAKAN ARDUINO Akhmad Salmi Firsyari, Pembimbing 1: Ir. Purwanto MT., Pembimbing 2: dan M Aziz Muslim ST., MT., Ph.D. Abstrak
1 SISTEM PENGENDALIAN SUHU PADA PROSES DISTILASI VAKUM BIOETANOL DENGAN MENGGUNAKAN ARDUINO Akhmad Salmi Firsyari, Pembimbing 1: Ir. Purwanto MT., Pembimbing 2: dan M Aziz Muslim ST., MT., Ph.D. Abstrak
ANALISIS PERANGKAT KERAS PADA ROBOT KESEIMBANGAN DENGAN MENGGUNAKAN METODE AUTO TUNING PID
 ANALISIS PERANGKAT KERAS PADA ROBOT KESEIMBANGAN DENGAN MENGGUNAKAN METODE AUTO TUNING PID LAPORAN AKHIR Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Jurusan Teknik Elektro Program
ANALISIS PERANGKAT KERAS PADA ROBOT KESEIMBANGAN DENGAN MENGGUNAKAN METODE AUTO TUNING PID LAPORAN AKHIR Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Jurusan Teknik Elektro Program
SISTEM MONITORING LEVEL AIR MENGGUNAKAN KENDALI PID
 SISTEM MONITORING LEVEL AIR MENGGUNAKAN KENDALI PID TUGAS AKHIR Oleh : TAUFIQ NUR IKHSAN 3210801015 Disusun untuk memenuhi syarat kelulusan Program Diploma III Program Studi Teknik Elektronika Politeknik
SISTEM MONITORING LEVEL AIR MENGGUNAKAN KENDALI PID TUGAS AKHIR Oleh : TAUFIQ NUR IKHSAN 3210801015 Disusun untuk memenuhi syarat kelulusan Program Diploma III Program Studi Teknik Elektronika Politeknik
BAB IV HASIL DAN PEMBAHASAN. 1. Nama : Timbangan Bayi. 2. Jenis : Timbangan Bayi Digital. 4. Display : LCD Character 16x2. 5. Dimensi : 30cmx20cmx7cm
 49 BAB IV HASIL DAN PEMBAHASAN 4.1 Spesifikasi Alat 1. Nama : Timbangan Bayi 2. Jenis : Timbangan Bayi Digital 3. Berat : 5 Kg 4. Display : LCD Character 16x2 5. Dimensi : 30cmx20cmx7cm 6. Sensor : Loadcell
49 BAB IV HASIL DAN PEMBAHASAN 4.1 Spesifikasi Alat 1. Nama : Timbangan Bayi 2. Jenis : Timbangan Bayi Digital 3. Berat : 5 Kg 4. Display : LCD Character 16x2 5. Dimensi : 30cmx20cmx7cm 6. Sensor : Loadcell
BAB 4 IMPLEMENTASI DAN EVALUASI. Pada Bab IV ini menjelaskan tentang spesifikasi sistem, rancang bangun
 BAB 4 IMPLEMENTASI DAN EVALUASI Pada Bab IV ini menjelaskan tentang spesifikasi sistem, rancang bangun keseluruhan sistem, prosedur pengoperasian sistem, implementasi dari sistem dan evaluasi hasil pengujian
BAB 4 IMPLEMENTASI DAN EVALUASI Pada Bab IV ini menjelaskan tentang spesifikasi sistem, rancang bangun keseluruhan sistem, prosedur pengoperasian sistem, implementasi dari sistem dan evaluasi hasil pengujian
PENGONTROL PID BERBASIS PENGONTROL MIKRO UNTUK MENGGERAKKAN ROBOT BERODA. Jurusan Teknik Elektro, Fakultas Teknik. Universitas Kristen Maranatha
 PENGONTROL PID BERBASIS PENGONTROL MIKRO UNTUK MENGGERAKKAN ROBOT BERODA Hendrik Albert Schweidzer Timisela Jl. Babakan Jeruk Gg. Barokah No. 25, 40164, 081322194212 Email: has_timisela@linuxmail.org Jurusan
PENGONTROL PID BERBASIS PENGONTROL MIKRO UNTUK MENGGERAKKAN ROBOT BERODA Hendrik Albert Schweidzer Timisela Jl. Babakan Jeruk Gg. Barokah No. 25, 40164, 081322194212 Email: has_timisela@linuxmail.org Jurusan
SISTEM PENGATURAN MOTOR DC UNTUK STARTING DAN BREAKING PADA PINTU GESER MENGGUNAKAN PID
 SISTEM PENGATURAN MOTOR DC UNTUK STARTING DAN BREAKING PADA PINTU GESER MENGGUNAKAN PID Disusun oleh : Rachmat Yustiawan Hadi 2209030002 Lucky Setiawan 2209030031 Dosen pembimbing 1 Ir. Rusdhianto Effendi
SISTEM PENGATURAN MOTOR DC UNTUK STARTING DAN BREAKING PADA PINTU GESER MENGGUNAKAN PID Disusun oleh : Rachmat Yustiawan Hadi 2209030002 Lucky Setiawan 2209030031 Dosen pembimbing 1 Ir. Rusdhianto Effendi
BAB IV PENGUJIAN ALAT DAN ANALISA
 BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
MAKALAH. Sistem Kendali. Implementasi Sistim Navigasi Wall Following. Mengguakan Kontrol PID. Dengan Metode Tuning Pada Robot Beroda
 MAKALAH Sistem Kendali Implementasi Sistim Navigasi Wall Following Mengguakan Kontrol PID Dengan Metode Tuning Pada Robot Beroda oleh : ALFON PRIMA 1101024005 PROGRAM STUDI TEKNIK LISTRIK JURUSAN TEKNIK
MAKALAH Sistem Kendali Implementasi Sistim Navigasi Wall Following Mengguakan Kontrol PID Dengan Metode Tuning Pada Robot Beroda oleh : ALFON PRIMA 1101024005 PROGRAM STUDI TEKNIK LISTRIK JURUSAN TEKNIK
BAB 1 PENDAHULUAN. poros yang cukup besar sehingga sangat banyak digunakan. Dalam mengatasi sesuatu
 BAB PENDAHULUAN. Latar Belakang Pada zaman sekarang teknologi telah berkembang pesat. Salah satu dari perkembangan teknologi yaitu pada elektronika. Perkembangan elektronika diciptakan untuk membantu manusia
BAB PENDAHULUAN. Latar Belakang Pada zaman sekarang teknologi telah berkembang pesat. Salah satu dari perkembangan teknologi yaitu pada elektronika. Perkembangan elektronika diciptakan untuk membantu manusia
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Dalam bab ini penulis akan membahas prinsip kerja rangkaian yang disusun untuk merealisasikan sistem alat, dalam hal ini potensiometer sebagai kontroler dari motor servo, dan
BAB III PERANCANGAN SISTEM Dalam bab ini penulis akan membahas prinsip kerja rangkaian yang disusun untuk merealisasikan sistem alat, dalam hal ini potensiometer sebagai kontroler dari motor servo, dan
PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC
 Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT)
") DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
BAB IV PENGUJIAN ALAT DAN PEMBAHASAN
 BAB IV PENGUJIAN ALAT DAN PEMBAHASAN 4.1 Uji Coba Alat Dalam bab ini akan dibahas mengenai pengujian alat yang telah dibuat. Dimulai dengan pengujian setiap bagian-bagian dari hardware dan software yang
BAB IV PENGUJIAN ALAT DAN PEMBAHASAN 4.1 Uji Coba Alat Dalam bab ini akan dibahas mengenai pengujian alat yang telah dibuat. Dimulai dengan pengujian setiap bagian-bagian dari hardware dan software yang