(Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC)
|
|
|
- Lanny Sudirman
- 6 tahun lalu
- Tontonan:
Transkripsi
1 (Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC)



2 Latar Belakang
3 Tujuan Tugas Akhir merancang sistem pengendalian kecepatan pada mobil listrik

4 2 1 Mulai No Uji sistem Studi literatur Marancang dan membuat rangka dan sistem gerak mobil yes Merancang pengendali dan algoritma program PWM untuk kecepatan motor DC berbasis minimum system ATMEGA 8535 Menentukan tipe motor listrik DC No Uji sistem Merancang dan membuat motor driver dn sensor kecepatan yes Pengambilan & analisa data 2 1 Penyusunan laporan Selesai
5 Diagram blok sistem Pedal Gas/ Potensiomet er Mikrokontroller ATMEGA 8535 Driver Motor MOTOR LISTRIK DC Optokopler
6 TEORI PENUNJANG Motor Listrik DC Motor listrik merupakan suatu perangkat elektronika yang mampu mengubah energi listrik menjadi energi mekanik.


7 TEORI PENUNJANG PWM ( Pulse Width Modulation )bekerja dengan cara membuat gelombang persegi yang memiliki perbandingan pulsa high terhadap pulsa low yang telah tertentu, biasanya diskalakan dari 0 hingga 100%. Perbandingan pulsa high terhadap low ini akan menentukan jumlah daya yang diberikan ke motor DC.
8 PID Controller TEORI PENUNJANG Sistem pengendali PID adalah suatu pengendalian untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem tersebut.


9 PERANCANGAN

10 PERANCANGAN





11 PERANCANGAN

12 TIPE MOTOR Tipe Motor Listrik DC Spesifikasi Motor DC Type OTIS ELEVATOR DC GEAR MOTOR J06333BI 110 VDC 2 AMPS Gearbox : 1 Daya 120 W Dimensi Panjang 32 cm Lebar 21 cm Diameter Poros 11 cm
13 DRIVER MOTOR Prinsip kerja driver motor adalah mengatur aliran arus pada motor DC. Apabila arah arus dibalikkan maka putaran motor akan berputar kearah sebaliknya juga Rangkaian Driver motor dengan prinsip kerja relay

14 DRIVER MOTOR Driver Motor adalah sebuah rangkaian yang digunakan untuk mengendalikan sebuah motor DC sehingga dapat berputar searah ataupun melawan jarum jam.



15 Rotary encoder merupakan suatu komponen elektromekanik yang dimanfaatkan untuk mengukur perpindahan (rotasi)pada motor. Optocoupler merupakan suatu komponen enelektronik yang dirancang untuk mentransfer sinyal listrik dengan memanfaatkan gelombang cahaya.
16 PROGRAM PENGENDALI

17 Penyusunan Algoritma PID pada controller PROGRAM PENGENDALI
18 VIDEO Tracking Set Point
19 Analisa Sistem Rotasi Roda Gigi Sebagai Penghubung Motor Dengan Poros Roda ANALISA DATA Pada perancangan mobil listrik ZEC-01 salah satu sistem penggerak utama adalah poros roda. Poros roda dan poros motor DC dihubungkan oleh rantai. Pada sistem rotasi roda gigi mobil listrik menggunakan empat buah gear yang masing-masing memiliki jumlah gigi yg berbeda.
20
21 Tabel Perbandingan gear dengan v (Rpm) No. ngear 1 ngear 2 ngear 3 ngear 4 V(Rpm) torsi kali kali kali
22 Analisa Sistem Pengendali Kecepatan Mobil Listrik Sistem Pengendali yang digunakan adalah Metode PID yang diterapkan didalam Mikrokontroller. Metode tuning PID trial and error hingga didapat kan grafik respon yang memiliki kriteria performansi sistem yang baik. kp1= ki1=0.01 kd1=0.01
23 Listing Program PID pada Mikro kontroller

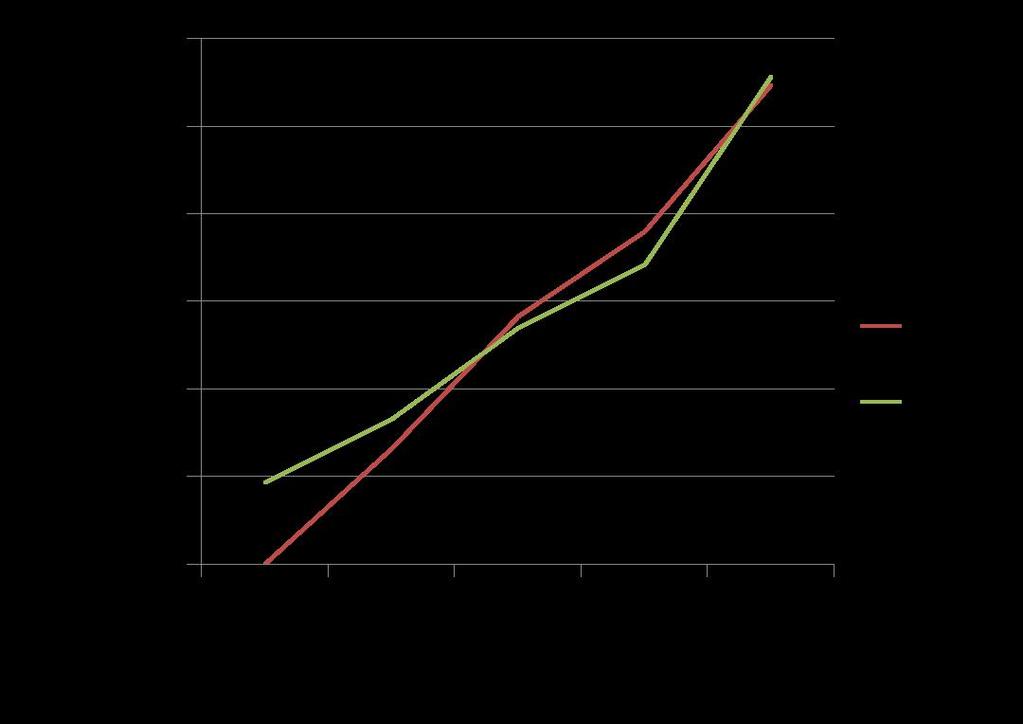
24 Analisa sistem pengendalian tanpa beban

25 Hasil grafik Respon sistem Set point 150 Rpm, Mp 25 / 16%, Settling time 18 second

26 Set point 200 Rpm, Mp 23 / 11 %, Settling time 8 s

27 Set point 250 Rpm, Mp 25 / 10%, Settling time 12

28 Set point 270 Rpm, MP 0, Settling time 10

29 Analisa Sistem Pedal Gas dengan Kecepatan Pada Mobil Listrik ZEC-01
30 Tabel Persentase Pedal gas Dengan Kecepatan No. % Pedal Set Point Mp V (Rpm) Ts Gas Potensiometer rpm / % / 20% 10 12s / 26% 19 12s / 16% 31 18s / 6% 47 23s
31 Analisa dan Validasi Data Kecepatan Mobil Listrik Dengan Menggunakan Stroboskop No. Nilai Binnary PWM Kecepatan (RPM) , , , Tabel Nilai Kecepatan dengan sensor optokopler
32 Tabel Nilai Kecepatan dengan stroboskop No. Nilai Binnary PWM Kecepatan (RPM) , , ,
33
34 Pembahasan Pada sistem rotasi gear, sangat tepat menggunakan 4 gear karna mendapat kenaikan torsi atau tenaga 2x dibanding sistem gear yang secara langsung menghubungkan poros motor dengan as roda. Pada sistem pengendali kecepatan motor metode yg digunakan adalah pengendali PID dengan metode trial and error. Pada pengujian sistem pengendali dengan tanpa beban sistem pengendali dapat bekerja lebih bagus, hal ini terlihat dari data yang diperoleh sepert Mp cenderung lebih kecil dan Settling time cenderung lebih cepat, error steady state kecil hanya sekitar 0,7%
35 Kesimpulan Pada sistem rotasi gear, sangat tepat menggunakan 4 gear karna mendapat kenaikan torsi atau tenaga 2x dibanding sistem gear yang secara langsung menghubungkan poros motor dengan as roda. Pada sistem pengendali kecepatan motor menggunakan metode pengendali PID dengan nilai Kp = , Ti = 0.01, Td = 0.01 Pada pengujian hardware sistem pengendali dapat bekerja lebih bagus, hal ini terlihat dari data yang diperoleh sepert Mp = 0, cenderung lebih kecil dan Settling time cenderung lebih cepat sebesar 8 s, error steady state kecil hanya sekitar 0,7% Pada motor DC yang ber RPM kecil, tapi memiliki torsi besar akan mengalami banyak overshoot ketika dia dioperasikan pada set point rendah sebesar 150 Rpm Sistem akan mengalami respon terbaik pada set point tinggi 270 Rpm

36
IV. PERANCANGAN SISTEM
 SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 2.1. Mikrokontroller AVR Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan serta keluaran serta dapat di read dan write dengan cara khusus. Mikrokontroller
BAB 2 LANDASAN TEORI 2.1. Mikrokontroller AVR Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan serta keluaran serta dapat di read dan write dengan cara khusus. Mikrokontroller
II. PERANCANGAN SISTEM
 Sistem Pengaturan Intensitas Cahaya Dengan Perekayasaan Kondisi Lingkungan Pada Rumah Kaca Alfido, Ir. Purwanto, MT., M.Aziz muslim, ST., MT.,Ph.D. Teknik Elektro Universitas Brawijaya Jalan M.T Haryono
Sistem Pengaturan Intensitas Cahaya Dengan Perekayasaan Kondisi Lingkungan Pada Rumah Kaca Alfido, Ir. Purwanto, MT., M.Aziz muslim, ST., MT.,Ph.D. Teknik Elektro Universitas Brawijaya Jalan M.T Haryono
Presentasi Tugas Akhir
 Presentasi Tugas Akhir OPTIMASI KONTROLER PID BERBASIS ALGORITMA PARTICLE SWARM OPTIMIZATION UNTUK PENGENDALIAN KECEPATAN MOTOR INDUKSI TIGA FASE Oleh: Suhartono (2209 105 008) Pembimbing: Ir. Ali Fatoni,
Presentasi Tugas Akhir OPTIMASI KONTROLER PID BERBASIS ALGORITMA PARTICLE SWARM OPTIMIZATION UNTUK PENGENDALIAN KECEPATAN MOTOR INDUKSI TIGA FASE Oleh: Suhartono (2209 105 008) Pembimbing: Ir. Ali Fatoni,
BAB I PENDAHULUAN. menggerakan belt conveyor, pengangkat beban, ataupun sebagai mesin
 1 BAB I PENDAHULUAN 1.1. Latar Belakang Motor DC atau motor arus searah yaitu motor yang sering digunakan di dunia industri, biasanya motor DC ini digunakan sebagai penggerak seperti untuk menggerakan
1 BAB I PENDAHULUAN 1.1. Latar Belakang Motor DC atau motor arus searah yaitu motor yang sering digunakan di dunia industri, biasanya motor DC ini digunakan sebagai penggerak seperti untuk menggerakan
Gambar 1. Screw conveyor dan Belt conveyor
 APLIKASI KONTROL PID UNTUK PENGATURAN PUTARAN MOTOR DC PADA ALAT PENGEPRES ADONAN ROTI (SCREW CONVEYOR) Oleh: Vincentius Nyorendra Febrianto NIM. 0810630101 Jurusan Teknik Elektro Fakultas Teknik Universitas
APLIKASI KONTROL PID UNTUK PENGATURAN PUTARAN MOTOR DC PADA ALAT PENGEPRES ADONAN ROTI (SCREW CONVEYOR) Oleh: Vincentius Nyorendra Febrianto NIM. 0810630101 Jurusan Teknik Elektro Fakultas Teknik Universitas
PENERAPAN ALGORITMA KENDALI PROPORTIONAL INTEGRAL DERIVATIVE PADA SISTEM REAL TIME UNTUK MEMPELAJARI TANGGAPAN TRANSIEN
 PENERAPAN ALGORITMA KENDALI PROPORTIONAL INTEGRAL DERIVATIVE PADA SISTEM REAL TIME UNTUK MEMPELAJARI TANGGAPAN TRANSIEN Isnan Nur Rifai 1, Panji Saka Gilab Asa 2 Diploma Elektronika Dan Instrumentasi Sekolah
PENERAPAN ALGORITMA KENDALI PROPORTIONAL INTEGRAL DERIVATIVE PADA SISTEM REAL TIME UNTUK MEMPELAJARI TANGGAPAN TRANSIEN Isnan Nur Rifai 1, Panji Saka Gilab Asa 2 Diploma Elektronika Dan Instrumentasi Sekolah
BAB 4 IMPLEMENTASI DAN EVALUASI. (secara hardware).hasil implementasi akan dievaluasi untuk mengetahui apakah
.hasil implementasi akan dievaluasi untuk mengetahui apakah") BAB 4 IMPLEMENTASI DAN EVALUASI Pelaksanaan dari perancangan telah dibuat dan dijelaskan pada Bab 3, kemudian perancangan tersebut diimplementasi ke dalam bentuk yang nyata (secara hardware).hasil implementasi
BAB 4 IMPLEMENTASI DAN EVALUASI Pelaksanaan dari perancangan telah dibuat dan dijelaskan pada Bab 3, kemudian perancangan tersebut diimplementasi ke dalam bentuk yang nyata (secara hardware).hasil implementasi
DAFTAR ISI HALAMAN JUDUL... HALAMAN PENGESAHAN... HALAMAN PENYATAAN... INTISARI... ABSTRACT... HALAMAN MOTTO... HALAMAN PERSEMBAHAN... PRAKATA...
 DAFTAR ISI HALAMAN JUDUL... HALAMAN PENGESAHAN... HALAMAN PENYATAAN... INTISARI... ABSTRACT... HALAMAN MOTTO... HALAMAN PERSEMBAHAN... PRAKATA... DAFTAR ISI... DAFTAR GAMBAR... DAFTAR TABEL... i iii iv
DAFTAR ISI HALAMAN JUDUL... HALAMAN PENGESAHAN... HALAMAN PENYATAAN... INTISARI... ABSTRACT... HALAMAN MOTTO... HALAMAN PERSEMBAHAN... PRAKATA... DAFTAR ISI... DAFTAR GAMBAR... DAFTAR TABEL... i iii iv
SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560
 1 SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560 Adityan Ilmawan Putra, Pembimbing 1: Purwanto, Pembimbing 2: Bambang Siswojo.
1 SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560 Adityan Ilmawan Putra, Pembimbing 1: Purwanto, Pembimbing 2: Bambang Siswojo.
SISTEM PENGATURAN MOTOR DC UNTUK STARTING DAN BREAKING PADA PINTU GESER MENGGUNAKAN PID
 SISTEM PENGATURAN MOTOR DC UNTUK STARTING DAN BREAKING PADA PINTU GESER MENGGUNAKAN PID Disusun oleh : Rachmat Yustiawan Hadi 2209030002 Lucky Setiawan 2209030031 Dosen pembimbing 1 Ir. Rusdhianto Effendi
SISTEM PENGATURAN MOTOR DC UNTUK STARTING DAN BREAKING PADA PINTU GESER MENGGUNAKAN PID Disusun oleh : Rachmat Yustiawan Hadi 2209030002 Lucky Setiawan 2209030031 Dosen pembimbing 1 Ir. Rusdhianto Effendi
Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC
 Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC Andhyka Vireza, M. Aziz Muslim, Goegoes Dwi N. 1 Abstrak Kontroler PID akan berjalan dengan baik jika mendapatkan tuning
Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC Andhyka Vireza, M. Aziz Muslim, Goegoes Dwi N. 1 Abstrak Kontroler PID akan berjalan dengan baik jika mendapatkan tuning
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan
RANCANG BANGUN SISTEM PENGENDALI KECEPATAN MOTOR DC DENGAN MENGGUNAKAN METODE PENGENDALI PID PADA MOBIL LISTRIK (ZEC-01)
") RANCANG BANGUN SISTEM PENGENDALI KECEPATAN MOTOR DC DENGAN MENGGUNAKAN METODE PENGENDALI PID PADA MOBIL LISTRIK (ZEC-01) Dimasyqi Zulkha (1) Ir. Ya umar, MT (2) 1) Jurusan Teknik Fisika Fakultas Teknologi
RANCANG BANGUN SISTEM PENGENDALI KECEPATAN MOTOR DC DENGAN MENGGUNAKAN METODE PENGENDALI PID PADA MOBIL LISTRIK (ZEC-01) Dimasyqi Zulkha (1) Ir. Ya umar, MT (2) 1) Jurusan Teknik Fisika Fakultas Teknologi
YONI WIDHI PRIHANA DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT.
 IMPLEMENTASI SENSOR KAPASITIF PADA SISTEM PENGERING GABAH OTOMATIS YONI WIDHI PRIHANA 2210100194 DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT. LATAR BELAKANG Indonesia merupakan
IMPLEMENTASI SENSOR KAPASITIF PADA SISTEM PENGERING GABAH OTOMATIS YONI WIDHI PRIHANA 2210100194 DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT. LATAR BELAKANG Indonesia merupakan
Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
 JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
BAB 1 PENDAHULUAN. poros yang cukup besar sehingga sangat banyak digunakan. Dalam mengatasi sesuatu
 BAB PENDAHULUAN. Latar Belakang Pada zaman sekarang teknologi telah berkembang pesat. Salah satu dari perkembangan teknologi yaitu pada elektronika. Perkembangan elektronika diciptakan untuk membantu manusia
BAB PENDAHULUAN. Latar Belakang Pada zaman sekarang teknologi telah berkembang pesat. Salah satu dari perkembangan teknologi yaitu pada elektronika. Perkembangan elektronika diciptakan untuk membantu manusia
PERANCANGAN PENGENDALI POSISI LINIER UNTUK MOTOR DC DENGAN MENGGUNAKAN PID
 PERANCANGAN PENGENDALI POSISI LINIER UNTUK MOTOR DC DENGAN MENGGUNAKAN PID Endra 1 ; Nazar Nazwan 2 ; Dwi Baskoro 3 ; Filian Demi Kusumah 4 1 Jurusan Sistem Komputer, Fakultas Ilmu Komputer, Universitas
PERANCANGAN PENGENDALI POSISI LINIER UNTUK MOTOR DC DENGAN MENGGUNAKAN PID Endra 1 ; Nazar Nazwan 2 ; Dwi Baskoro 3 ; Filian Demi Kusumah 4 1 Jurusan Sistem Komputer, Fakultas Ilmu Komputer, Universitas
IMPLEMENTASI SISTEM KENDALI KECEPATAN MOTOR ARUS SEARAH MENGGUNAKAN KENDALI PID BERBASIS PROGRAMMABLE LOGIC CONTROLER
 IMPLEMENTASI SISTEM KENDALI KECEPATAN MOTOR ARUS SEARAH MENGGUNAKAN KENDALI PID BERBASIS PROGRAMMABLE LOGIC CONTROLER Winarso*, Itmi Hidayat Kurniawan Program Studi Teknik Elektro FakultasTeknik, Universitas
IMPLEMENTASI SISTEM KENDALI KECEPATAN MOTOR ARUS SEARAH MENGGUNAKAN KENDALI PID BERBASIS PROGRAMMABLE LOGIC CONTROLER Winarso*, Itmi Hidayat Kurniawan Program Studi Teknik Elektro FakultasTeknik, Universitas
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT)
") DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
BAB 4 HASIL DAN PEMBAHASAN Hasil Perancangan Perangkat Keras
 BAB 4 HASIL DAN PEMBAHASAN 4.1 Hasil Perancangan Pada bab ini akan dijelaskan mengenai hasil perancangan meliputi hasil perancangan perangkat keras dan perancangan sistem kendali. 4.1.1 Hasil Perancangan
BAB 4 HASIL DAN PEMBAHASAN 4.1 Hasil Perancangan Pada bab ini akan dijelaskan mengenai hasil perancangan meliputi hasil perancangan perangkat keras dan perancangan sistem kendali. 4.1.1 Hasil Perancangan
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER
 KONTROLER") SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
IMPLEMENTASI ROBOT THREE OMNI-DIRECTIONAL MENGGUNAKAN KONTROLER PID PADA ROBOT KONTES ROBOT ABU INDONESIA (KRAI)
") IMPLEMENTASI ROBOT THREE OMNI-DIRECTIONAL MENGGUNAKAN KONTROLER PID PADA ROBOT KONTES ROBOT ABU INDONESIA (KRAI) Publikasi Jurnal Skripsi Disusun Oleh : RADITYA ARTHA ROCHMANTO NIM : 916317-63 KEMENTERIAN
IMPLEMENTASI ROBOT THREE OMNI-DIRECTIONAL MENGGUNAKAN KONTROLER PID PADA ROBOT KONTES ROBOT ABU INDONESIA (KRAI) Publikasi Jurnal Skripsi Disusun Oleh : RADITYA ARTHA ROCHMANTO NIM : 916317-63 KEMENTERIAN
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Gambaran Umum Pada bab ini akan dibahas mengenai perencanaan perangkat keras elektronik (hardware) dan pembuatan mekanik robot. Sedangkan untuk pembuatan perangkat
BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Gambaran Umum Pada bab ini akan dibahas mengenai perencanaan perangkat keras elektronik (hardware) dan pembuatan mekanik robot. Sedangkan untuk pembuatan perangkat
Dhanny Tandil Ivander Sharon Manuel Siahaan Yansen Wilyanto
 PENGAPLIKASIAN KALMAN FILTER DAN KENDALI PID SEBAGAI PENYEIMBANG ROBOT RODA DUA SKRIPSI Oleh Dhanny Tandil 1200981844 Ivander Sharon Manuel Siahaan 1200981850 Yansen Wilyanto 1200991391 Universitas Bina
PENGAPLIKASIAN KALMAN FILTER DAN KENDALI PID SEBAGAI PENYEIMBANG ROBOT RODA DUA SKRIPSI Oleh Dhanny Tandil 1200981844 Ivander Sharon Manuel Siahaan 1200981850 Yansen Wilyanto 1200991391 Universitas Bina
AN-0012 Jenis-jenis Motor
 AN-0012 Jenis-jenis Motor Motor adalah merupakan bagian utama dari sebuah robot. Hampir semua jenis robot kecuali yang menggunakan muscle wire (kawat otot) selalu menggunakan motor. Jenis turtle, vehicle
AN-0012 Jenis-jenis Motor Motor adalah merupakan bagian utama dari sebuah robot. Hampir semua jenis robot kecuali yang menggunakan muscle wire (kawat otot) selalu menggunakan motor. Jenis turtle, vehicle
peralatan-peralatan industri maupun rumah tangga seperti pada fan, blower, pumps,
 1.1 Latar Belakang Kebutuhan tenaga listrik meningkat mengikuti perkembangan kehidupan manusia dan pertumbuhan di segala sektor industri yang mengarah ke modernisasi. Dalam sebagian besar industri, sekitar
1.1 Latar Belakang Kebutuhan tenaga listrik meningkat mengikuti perkembangan kehidupan manusia dan pertumbuhan di segala sektor industri yang mengarah ke modernisasi. Dalam sebagian besar industri, sekitar
BAB 2 LANDASAN TEORI. robotika. Salah satu alasannya adalah arah putaran motor DC, baik searah jarum jam
 BAB 2 LANDASAN TEORI 2.1 Jenis Jenis Motor DC Motor DC merupakan jenis motor yang paling sering digunakan di dalam dunia robotika. Salah satu alasannya adalah arah putaran motor DC, baik searah jarum jam
BAB 2 LANDASAN TEORI 2.1 Jenis Jenis Motor DC Motor DC merupakan jenis motor yang paling sering digunakan di dalam dunia robotika. Salah satu alasannya adalah arah putaran motor DC, baik searah jarum jam
SISTEM PENGENDALI PERLAMBATAN KECEPATAN MOTOR PADA ROBOT LINE FOLLOWER DENGAN SENSOR ULTRASONIK
 1 SISTEM PENGENDALI PERLAMBATAN KECEPATAN MOTOR PADA ROBOT LINE FOLLOWER DENGAN SENSOR ULTRASONIK Deaz Achmedo Giovanni Setyanoveka, Pembimbing 1: Ir. Purwanto, MT., Pembimbing 2: Ir. Bambang Siswoyo,
1 SISTEM PENGENDALI PERLAMBATAN KECEPATAN MOTOR PADA ROBOT LINE FOLLOWER DENGAN SENSOR ULTRASONIK Deaz Achmedo Giovanni Setyanoveka, Pembimbing 1: Ir. Purwanto, MT., Pembimbing 2: Ir. Bambang Siswoyo,
PENGATURAN KUAT CAHAYA PADA SOLATUBE MENGGUNAKAN KONTROLER PID BERBASIS MIKROKONTROLER
 PENGATURAN KUAT CAHAYA PADA SOLATUBE MENGGUNAKAN KONTROLER PID BERBASIS MIKROKONTROLER Firman Dewan Saputra. 1, Dr. Ir. Purwanto, MT. 2, Ir. Retnowati, MT. 2 1 Mahasiswa Teknik Elektro Univ. Brawijaya,
PENGATURAN KUAT CAHAYA PADA SOLATUBE MENGGUNAKAN KONTROLER PID BERBASIS MIKROKONTROLER Firman Dewan Saputra. 1, Dr. Ir. Purwanto, MT. 2, Ir. Retnowati, MT. 2 1 Mahasiswa Teknik Elektro Univ. Brawijaya,
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga Oscillating Water Column. 3.1. Gambaran Alat Alat yang
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga Oscillating Water Column. 3.1. Gambaran Alat Alat yang
BAB III PERANCANGAN DAN PEMBUATAN SISTEM
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software maupun hardware yang digunakan untuk mendukung keseluruhan sistem
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software maupun hardware yang digunakan untuk mendukung keseluruhan sistem
Bab IV Pengujian dan Analisis
 Bab IV Pengujian dan Analisis Setelah proses perancangan, dilakukan pengujian dan analisis untuk mengukur tingkat keberhasilan perancangan yang telah dilakukan. Pengujian dilakukan permodul, setelah modul-modul
Bab IV Pengujian dan Analisis Setelah proses perancangan, dilakukan pengujian dan analisis untuk mengukur tingkat keberhasilan perancangan yang telah dilakukan. Pengujian dilakukan permodul, setelah modul-modul
Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno
 1 Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno Anggara Truna Negara, Pembimbing 1: Retnowati, Pembimbing 2: Rahmadwati. Abstrak Perancangan alat fermentasi kakao otomatis
1 Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno Anggara Truna Negara, Pembimbing 1: Retnowati, Pembimbing 2: Rahmadwati. Abstrak Perancangan alat fermentasi kakao otomatis
Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID
 1 Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID Rievqi Alghoffary, Pembimbing 1: Purwanto, Pembimbing 2: Bambang siswoyo. Abstrak Pengontrolan kecepatan pada alat
1 Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID Rievqi Alghoffary, Pembimbing 1: Purwanto, Pembimbing 2: Bambang siswoyo. Abstrak Pengontrolan kecepatan pada alat
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Konsep dasar Perancangan Pada bab ini akan dibahas mengenai perencanaan perangkat keras elektronik (hardware) dan pembuatan mekanik robot. Sedangkan untuk pembuatan
BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Konsep dasar Perancangan Pada bab ini akan dibahas mengenai perencanaan perangkat keras elektronik (hardware) dan pembuatan mekanik robot. Sedangkan untuk pembuatan
PERANCANGAN SISTEM KENDALI PID UNTUK KECEPATAN MOTOR DC BERBASIS MIKROKONTROLER ATMEGA16 SKRIPSI
 PERANCANGAN SISTEM KENDALI PID UNTUK KECEPATAN MOTOR DC BERBASIS MIKROKONTROLER ATMEGA16 SKRIPSI Diajukan Untuk Memenuhi Sebagian Persyaratan Mencapai Derajat Sarjana Teknik Industri Oleh Dedy Drian Nugroho
PERANCANGAN SISTEM KENDALI PID UNTUK KECEPATAN MOTOR DC BERBASIS MIKROKONTROLER ATMEGA16 SKRIPSI Diajukan Untuk Memenuhi Sebagian Persyaratan Mencapai Derajat Sarjana Teknik Industri Oleh Dedy Drian Nugroho
BAB IV PENGUJIAN DAN ANALISA
 BAB IV PENGUJIAN DAN ANALISA Pengujian dan analisa sistem merupakan tahap akhir dari realisasi pengendali PID pada pendulum terbalik menggunakan mikrokontroller ATmega8 agar dapat dilinearkan disekitar
BAB IV PENGUJIAN DAN ANALISA Pengujian dan analisa sistem merupakan tahap akhir dari realisasi pengendali PID pada pendulum terbalik menggunakan mikrokontroller ATmega8 agar dapat dilinearkan disekitar
PERANCANGAN KONTROLER PENGGANTI ELECTRONIC CONTROL UNIT UNTUK MENGATUR POSISI SUDUT FLAP PADA MODEL MINIATUR PESAWAT N-219
 1 PERANCANGAN KONTROLER PENGGANTI ELECTRONIC CONTROL UNIT UNTUK MENGATUR POSISI SUDUT FLAP PADA MODEL MINIATUR PESAWAT N-219 Hakiki Bagus Putro W., Pembimbing 1: Ir. Purwanto.MT, Pembimbing 2: Ir. Bambang
1 PERANCANGAN KONTROLER PENGGANTI ELECTRONIC CONTROL UNIT UNTUK MENGATUR POSISI SUDUT FLAP PADA MODEL MINIATUR PESAWAT N-219 Hakiki Bagus Putro W., Pembimbing 1: Ir. Purwanto.MT, Pembimbing 2: Ir. Bambang
Pengendalian Gerak Robot Penghindar Halangan Menggunakan Citra dengan Kontrol PID
 Journal of Electrical Electronic Control and Automotive Engineering (JEECAE) Pengendalian Gerak Robot Penghindar Halangan Menggunakan Citra dengan Kontrol PID Basuki Winarno, S.T., M.T. Jurusan Teknik
Journal of Electrical Electronic Control and Automotive Engineering (JEECAE) Pengendalian Gerak Robot Penghindar Halangan Menggunakan Citra dengan Kontrol PID Basuki Winarno, S.T., M.T. Jurusan Teknik
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID
 UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
BAB IV ANALISA DAN PENGUJIAN SISTEM
 BAB IV ANALISA DAN PENGUJIAN SISTEM 4.1 Pengujian Perangkat Keras (Hardware) Pengujian perangkat keras sangat penting dilakukan karena melalui pengujian ini rangkaian-rangkaian elektronika dapat diuji
BAB IV ANALISA DAN PENGUJIAN SISTEM 4.1 Pengujian Perangkat Keras (Hardware) Pengujian perangkat keras sangat penting dilakukan karena melalui pengujian ini rangkaian-rangkaian elektronika dapat diuji
SEMINAR TUGAS AKHIR. Dosen Pembimbing: Imam Abadi, ST, MT Dr. Ir.Ali Musyafa MSc
 SEMINAR TUGAS AKHIR RANCANG BANGUN APLIKASI KONTROL PID SISTEM PENJEJAK MATAHARI UNTUK PANEL SURYA PADA SISTEM TEKNOLOGI HYBRID KONVERSI ENERGI SURYA & ANGIN Disusun Oleh : Uqud Adyat Ade Wijaya NRP. 2410
SEMINAR TUGAS AKHIR RANCANG BANGUN APLIKASI KONTROL PID SISTEM PENJEJAK MATAHARI UNTUK PANEL SURYA PADA SISTEM TEKNOLOGI HYBRID KONVERSI ENERGI SURYA & ANGIN Disusun Oleh : Uqud Adyat Ade Wijaya NRP. 2410
M.FADHILLAH RIFKI ( ) Pembimbing: Dr.Ir. Bambang Sampurno, MT
 Pembimbing: Dr.Ir. Bambang Sampurno, MT") IMPLEMENTASI KONTROL PD UNTUK MENGATUR KECEPATAN MOTOR DC PADA ECVT (ELECTRIKAL CONTINUOUSLY VARIABLE TRANSMISSION) M.FADHILLAH RIFKI (2108.100.512) Pembimbing: Dr.Ir. Bambang Sampurno, MT Latar Belakang
IMPLEMENTASI KONTROL PD UNTUK MENGATUR KECEPATAN MOTOR DC PADA ECVT (ELECTRIKAL CONTINUOUSLY VARIABLE TRANSMISSION) M.FADHILLAH RIFKI (2108.100.512) Pembimbing: Dr.Ir. Bambang Sampurno, MT Latar Belakang
Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID
 Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID Arga Rifky Nugraha, Pembimbing 1: Rahmadwati, Pembimbing 2: Retnowati. 1 Abstrak Pengontrolan kecepatan pada
Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID Arga Rifky Nugraha, Pembimbing 1: Rahmadwati, Pembimbing 2: Retnowati. 1 Abstrak Pengontrolan kecepatan pada
PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO. Else Orlanda Merti Wijaya.
 PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO Else Orlanda Merti Wijaya S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : elsewijaya@mhs.unesa.ac.id
PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO Else Orlanda Merti Wijaya S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : elsewijaya@mhs.unesa.ac.id
PERANCANGAN PEMUTUS ALIRAN LISTRIK OTOMATIS BERBASIS MIKROKONTROLER ATMEGA8535 TUGAS AKHIR FAHRI MAHYUZAR
 PERANCANGAN PEMUTUS ALIRAN LISTRIK OTOMATIS BERBASIS MIKROKONTROLER ATMEGA8535 TUGAS AKHIR FAHRI MAHYUZAR 092408037 PROGRAM STUDI D3 FISIKA INSTRUMENTASI FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS
PERANCANGAN PEMUTUS ALIRAN LISTRIK OTOMATIS BERBASIS MIKROKONTROLER ATMEGA8535 TUGAS AKHIR FAHRI MAHYUZAR 092408037 PROGRAM STUDI D3 FISIKA INSTRUMENTASI FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS
BAB IV PENGUJIAN DAN ANALISIS
 BAB IV PENGUJIAN DAN ANALISIS Pada bab ini akan dijelaskan mengenai pengujian dan analisis alat peraga sistem kendali pendulum terbalik yang meliputi pengujian dimensi mekanik, pengujian dimensi dan massa
BAB IV PENGUJIAN DAN ANALISIS Pada bab ini akan dijelaskan mengenai pengujian dan analisis alat peraga sistem kendali pendulum terbalik yang meliputi pengujian dimensi mekanik, pengujian dimensi dan massa
PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC
 Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID
 Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID 1 Ahmad Akhyar, Pembimbing 1: Purwanto, Pembimbing 2: Erni Yudaningtyas. Abstrak Alat penyiram tanaman yang sekarang
Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID 1 Ahmad Akhyar, Pembimbing 1: Purwanto, Pembimbing 2: Erni Yudaningtyas. Abstrak Alat penyiram tanaman yang sekarang
IMPLEMENTASI SISTEM KESEIMBANGAN ROBOT BERODA DUA DENGAN MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DIFERENSIAL
 IMPLEMENTASI SISTEM KESEIMBANGAN ROBOT BERODA DUA DENGAN MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DIFERENSIAL Muhammad Miftahur Rokhmat Teknik Elektro Universitas Brawijaya Dosen Pembimbing: 1. Purwanto,
IMPLEMENTASI SISTEM KESEIMBANGAN ROBOT BERODA DUA DENGAN MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DIFERENSIAL Muhammad Miftahur Rokhmat Teknik Elektro Universitas Brawijaya Dosen Pembimbing: 1. Purwanto,
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan industri skala kecil hingga skala besar di berbagai negara di belahan dunia saat ini tidak terlepas dari pemanfaatan mesin-mesin industri sebagai alat
BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan industri skala kecil hingga skala besar di berbagai negara di belahan dunia saat ini tidak terlepas dari pemanfaatan mesin-mesin industri sebagai alat
BAB IV PENGUJIAN ALAT DAN ANALISA
 BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
SISTEM KONTROL KECEPATAN MOTOR DC D-6759 BERBASIS ARDUINO MEGA 2560
 1 SISTEM KONTROL KECEPATAN MOTOR DC D-6759 BERBASIS ARDUINO MEGA 2560 Muhamad Faishol Arif, Pembimbing 1: Erni Yudaningtyas, Pembimbing 2: Rahmadwati. Abstrak Hampir seluruh industri didunia saat ini memanfaatkan
1 SISTEM KONTROL KECEPATAN MOTOR DC D-6759 BERBASIS ARDUINO MEGA 2560 Muhamad Faishol Arif, Pembimbing 1: Erni Yudaningtyas, Pembimbing 2: Rahmadwati. Abstrak Hampir seluruh industri didunia saat ini memanfaatkan
Eka Mandayatma *a), Fahmawati Hamida a), Hanifa Hasna Fawwaz a),
, Fahmawati Hamida a), Hanifa Hasna Fawwaz a),") Prosiding Seminar Nasional Teknologi Elektro Terapan 2017 Vol.01 No.01, ISSN: 2581-0049 Eka Mandayatma *a), Fahmawati Hamida a), Hanifa Hasna Fawwaz a), Abstrak: Jahe merupakan salah satu jenis tanaman
Prosiding Seminar Nasional Teknologi Elektro Terapan 2017 Vol.01 No.01, ISSN: 2581-0049 Eka Mandayatma *a), Fahmawati Hamida a), Hanifa Hasna Fawwaz a), Abstrak: Jahe merupakan salah satu jenis tanaman
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI. III, aspek keseluruhan dimulai dari Bab I hingga Bab III, maka dapat ditarik
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dibahs mengenai pengujian control reheat desuperheater yang telah dimodelkan pada matlab sebagaimana yang telah dibahas pada bab III, aspek
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dibahs mengenai pengujian control reheat desuperheater yang telah dimodelkan pada matlab sebagaimana yang telah dibahas pada bab III, aspek
SISTEM AKUISISI DATA PEMAKAIAN BAHAN BAKAR DAN JARAK YANG DITEMPUH BERBASIS ARDUINO
 Jurnal Ilmiah Widya Teknik Volume 15 Nomor 1 2016 ISSN 123.456.7890 SISTEM AKUISISI DATA PEMAKAIAN BAHAN BAKAR DAN JARAK YANG DITEMPUH BERBASIS ARDUINO Bram Anggita Putra 1* dan Djoko Untoro Suwarno 2
Jurnal Ilmiah Widya Teknik Volume 15 Nomor 1 2016 ISSN 123.456.7890 SISTEM AKUISISI DATA PEMAKAIAN BAHAN BAKAR DAN JARAK YANG DITEMPUH BERBASIS ARDUINO Bram Anggita Putra 1* dan Djoko Untoro Suwarno 2
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 39 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Gambaran Umum Pada bab ini akan dibahas mengenai perencanaan perangkat keras elektronik (hardware) dan pembuatan mekanik Eskalator. Sedangkan untuk pembuatan
39 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Gambaran Umum Pada bab ini akan dibahas mengenai perencanaan perangkat keras elektronik (hardware) dan pembuatan mekanik Eskalator. Sedangkan untuk pembuatan
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan dan Implementasi Pemotong Rumput Lapangan Sepakbola Otomatis dengan Sensor Garis dan Dinding ini, terdapat beberapa masalah
BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan dan Implementasi Pemotong Rumput Lapangan Sepakbola Otomatis dengan Sensor Garis dan Dinding ini, terdapat beberapa masalah
BAB I PENDAHULUAN. digital untuk menunjang dunia teknologi industri. mengukur kecepatan kendaraan, yang merupakan perlengkapan standar setiap
 BAB I PENDAHULUAN 1.1 Latar Belakang Dijaman teknologi industri yang semakin pesat kemajuan sebuah alat pengukuran yang menujang sebuah sistem. Merancang sebuah sistem pengukuran sebuah kecepatan, jarak
BAB I PENDAHULUAN 1.1 Latar Belakang Dijaman teknologi industri yang semakin pesat kemajuan sebuah alat pengukuran yang menujang sebuah sistem. Merancang sebuah sistem pengukuran sebuah kecepatan, jarak
PERANCANGAN SISTEM KENDALI GERAKAN ROBOT BERODA TIGA UNTUK PEMBERSIH LANTAI
 PERANCANGAN SISTEM KENDALI GERAKAN ROBOT BERODA TIGA UNTUK PEMBERSIH LANTAI Muhammad Firman S. NRP 2210 030 005 Muchamad Rizqy NRP 2210 030 047 Dosen Pembimbing Ir. Rusdhianto Effendie AK, M.T NIP. 19570424
PERANCANGAN SISTEM KENDALI GERAKAN ROBOT BERODA TIGA UNTUK PEMBERSIH LANTAI Muhammad Firman S. NRP 2210 030 005 Muchamad Rizqy NRP 2210 030 047 Dosen Pembimbing Ir. Rusdhianto Effendie AK, M.T NIP. 19570424
BAB III METODOLOGI PENELITIAN
 BAB III METODOLOGI PENELITIAN 3.1. Langkah-langkah Penelitian Langkah-langkah penelitian yang akan dilakukan oleh penulis yang pertama adalah membahas perancangan alat yang meliputi perancangan mekanik
BAB III METODOLOGI PENELITIAN 3.1. Langkah-langkah Penelitian Langkah-langkah penelitian yang akan dilakukan oleh penulis yang pertama adalah membahas perancangan alat yang meliputi perancangan mekanik
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Di era globalisasi sekarang ini teknologi dan informasi semakin berkembang pesat, begitu juga teknologi robot. Robotika merupakan bidang teknologi yang mengalami banyak
BAB 1 PENDAHULUAN 1.1 Latar Belakang Di era globalisasi sekarang ini teknologi dan informasi semakin berkembang pesat, begitu juga teknologi robot. Robotika merupakan bidang teknologi yang mengalami banyak
PERANCANGAN DAN IMPLEMENTASI PENGENDALI PID PADA SUBSISTEM AKTUATOR ROBOT MOBIL TIPE SINKRON
 PERANCANGAN DAN IMPLEMENTASI PENGENDALI PID PADA SUBSISTEM AKTUATOR ROBOT MOBIL TIPE SINKRON Muhammad Ilhamdi Rusydi Jurusan Teknik Elektro, Universitas Andalas Padang, Kampus Limau Manis, Padang, Sumatera
PERANCANGAN DAN IMPLEMENTASI PENGENDALI PID PADA SUBSISTEM AKTUATOR ROBOT MOBIL TIPE SINKRON Muhammad Ilhamdi Rusydi Jurusan Teknik Elektro, Universitas Andalas Padang, Kampus Limau Manis, Padang, Sumatera
Ahmadi *1), Richa Watiasih a), Ferry Wimbanu A a)
, Richa Watiasih a), Ferry Wimbanu A a)") Prosiding Seminar Nasional Teknologi Elektro Terapan 2017 Vol.01 No.01, ISSN: 2581-0049 Ahmadi *1), Richa Watiasih a), Ferry Wimbanu A a) Abstrak: Pada penelitian ini metode Fuzzy Logic diterapkan untuk
Prosiding Seminar Nasional Teknologi Elektro Terapan 2017 Vol.01 No.01, ISSN: 2581-0049 Ahmadi *1), Richa Watiasih a), Ferry Wimbanu A a) Abstrak: Pada penelitian ini metode Fuzzy Logic diterapkan untuk
BAB 1 PENDAHULUAN. pengujian nya, sebagai pengatur kecepatan menghasilkan steady state error yang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Mesin CNC (computer numerical controlled) adalah sebuah mesin yang diperintah oleh manusia untuk mengerjakan sesuatu yang telah di desain oleh computer. Mesin ini memiliki
BAB 1 PENDAHULUAN 1.1 Latar Belakang Mesin CNC (computer numerical controlled) adalah sebuah mesin yang diperintah oleh manusia untuk mengerjakan sesuatu yang telah di desain oleh computer. Mesin ini memiliki
PENGONTROL PID BERBASIS PENGONTROL MIKRO UNTUK MENGGERAKKAN ROBOT BERODA. Jurusan Teknik Elektro, Fakultas Teknik. Universitas Kristen Maranatha
 PENGONTROL PID BERBASIS PENGONTROL MIKRO UNTUK MENGGERAKKAN ROBOT BERODA Hendrik Albert Schweidzer Timisela Jl. Babakan Jeruk Gg. Barokah No. 25, 40164, 081322194212 Email: has_timisela@linuxmail.org Jurusan
PENGONTROL PID BERBASIS PENGONTROL MIKRO UNTUK MENGGERAKKAN ROBOT BERODA Hendrik Albert Schweidzer Timisela Jl. Babakan Jeruk Gg. Barokah No. 25, 40164, 081322194212 Email: has_timisela@linuxmail.org Jurusan
BAB III PERANCANGAN DAN PEMBUATAN
 37 BAB III PERANCANGAN DAN PEMBUATAN 3.1 Perancangan Dalam pembuatan suatu alat atau produk perlu adanya sebuah rancangan yang menjadi acuan dalam proses pembuatanya, sehingga kesalahan yang mungkin timbul
37 BAB III PERANCANGAN DAN PEMBUATAN 3.1 Perancangan Dalam pembuatan suatu alat atau produk perlu adanya sebuah rancangan yang menjadi acuan dalam proses pembuatanya, sehingga kesalahan yang mungkin timbul
Kontrol PID Pada Miniatur Plant Crane
 Konferensi Nasional Sistem & Informatika 2015 STMIK STIKOM Bali, 9 10 Oktober 2015 Kontrol PID Pada Miniatur Plant Crane E. Merry Sartika 1), Hardi Sumali 2) Jurusan Teknik Elektro Universitas Kristen
Konferensi Nasional Sistem & Informatika 2015 STMIK STIKOM Bali, 9 10 Oktober 2015 Kontrol PID Pada Miniatur Plant Crane E. Merry Sartika 1), Hardi Sumali 2) Jurusan Teknik Elektro Universitas Kristen
BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia adalah negara yang padat penduduk dan dikenal dengan melimpahnya sumber daya alam.
 BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia adalah negara yang padat penduduk dan dikenal dengan melimpahnya sumber daya alam. Tidak bisa kita pungkiri dengan kenyataan seperti itu rakyat Indonesia
BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia adalah negara yang padat penduduk dan dikenal dengan melimpahnya sumber daya alam. Tidak bisa kita pungkiri dengan kenyataan seperti itu rakyat Indonesia
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Bab ini menguraikan perancangan mekanik, perangkat elektronik dan perangkat lunak untuk membangun Pematrian komponen SMD dengan menggunakan conveyor untuk indutri kecil dengan
BAB III PERANCANGAN SISTEM Bab ini menguraikan perancangan mekanik, perangkat elektronik dan perangkat lunak untuk membangun Pematrian komponen SMD dengan menggunakan conveyor untuk indutri kecil dengan
III. METODE PENELITIAN. Pengerjaan tugas akhir ini bertempat di laboratorium Terpadu Teknik Elektro
 III. METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Pengerjaan tugas akhir ini bertempat di laboratorium Terpadu Teknik Elektro Jurusan Teknik Elektro Universitas Lampung pada bulan Desember 2013 sampai
III. METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Pengerjaan tugas akhir ini bertempat di laboratorium Terpadu Teknik Elektro Jurusan Teknik Elektro Universitas Lampung pada bulan Desember 2013 sampai
BAB 4 HASIL DAN PEMBAHASAN
 BAB 4 HASIL DAN PEMBAHASAN Pengujian robot mobil pemadam api dilakukan dengan tujuan untuk mengetahui kinerja robot serta performa dari sistem pergerakan robot yang telah dirancang pada Bab 3. Pengujian
BAB 4 HASIL DAN PEMBAHASAN Pengujian robot mobil pemadam api dilakukan dengan tujuan untuk mengetahui kinerja robot serta performa dari sistem pergerakan robot yang telah dirancang pada Bab 3. Pengujian
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
BAB 4 IMPLEMENTASI DAN EVALUASI. perangkat keras untuk mengoperasikan rangkaian DC servo pada mesin CNC dan
 BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Spesifikasi Sistem Spesifikasi pada sistem ini terbagi menjadi 2 (dua) bagian, yaitu spesifikasi perangkat keras untuk mengoperasikan rangkaian DC servo pada mesin CNC
BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Spesifikasi Sistem Spesifikasi pada sistem ini terbagi menjadi 2 (dua) bagian, yaitu spesifikasi perangkat keras untuk mengoperasikan rangkaian DC servo pada mesin CNC
BAB 4 PENGUJIAN DAN ANALISA. 4.1 Pengujian Fungsi Alih Tegangan (Duty Cycle) terhadap Motor
 terhadap Motor") BAB 4 PENGUJIAN DAN ANALISA Ada beberapa percobaan yang dilakukan. 4.1 Pengujian Fungsi Alih Tegangan (Duty Cycle) terhadap Motor Pengujian ini dilakukan dengan memberikan input PWM pada motor kemudian
BAB 4 PENGUJIAN DAN ANALISA Ada beberapa percobaan yang dilakukan. 4.1 Pengujian Fungsi Alih Tegangan (Duty Cycle) terhadap Motor Pengujian ini dilakukan dengan memberikan input PWM pada motor kemudian
RANCANG BANGUN SISTEM PENCAHAYAAN HYBRID MENGGUNAKAN SERAT OPTIK DAN ULTRABRIGHT LED
 RANCANG BANGUN SISTEM PENCAHAYAAN HYBRID MENGGUNAKAN SERAT OPTIK DAN ULTRABRIGHT LED Henri Sukmajaya NRP 2205100148 Dosen pembimbing: Dr. Muhammad Rivai, ST,MT Ir. Harris Pirngadi, MT,ID Jurusan Teknik
RANCANG BANGUN SISTEM PENCAHAYAAN HYBRID MENGGUNAKAN SERAT OPTIK DAN ULTRABRIGHT LED Henri Sukmajaya NRP 2205100148 Dosen pembimbing: Dr. Muhammad Rivai, ST,MT Ir. Harris Pirngadi, MT,ID Jurusan Teknik
BAB III PERANCANGAN DAN PEMBUATAN SISTEM. Gambar 3. 1 Diagram Blok Sistem Kecepatan Motor DC
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
DESAIN SENSORLESS (MINIMUM SENSOR) KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI. Toni Putra Agus Setiawan, Hari Putranto
 KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI. Toni Putra Agus Setiawan, Hari Putranto") Putra Agus S, Putranto, Desain Sensorless (Minimum Sensor) Kontrol Motor Induksi 1 Fasa Pada DESAIN SENSORLESS (MINIMUM SENSOR) KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI Toni Putra Agus Setiawan,
Putra Agus S, Putranto, Desain Sensorless (Minimum Sensor) Kontrol Motor Induksi 1 Fasa Pada DESAIN SENSORLESS (MINIMUM SENSOR) KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI Toni Putra Agus Setiawan,
PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI PID SEBAGAI PENGONTROL KECEPATAN ROBOT MOBIL PADA LINTASAN DATAR, TANJAKAN, DAN TURUNAN TUGAS AKHIR
 PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI PID SEBAGAI PENGONTROL KECEPATAN ROBOT MOBIL PADA LINTASAN DATAR, TANJAKAN, DAN TURUNAN TUGAS AKHIR Oleh : Imil Hamda Imran NIM : 06175062 Pembimbing I : Ir.
PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI PID SEBAGAI PENGONTROL KECEPATAN ROBOT MOBIL PADA LINTASAN DATAR, TANJAKAN, DAN TURUNAN TUGAS AKHIR Oleh : Imil Hamda Imran NIM : 06175062 Pembimbing I : Ir.
BAB III PERANCANGAN DAN PEMBUATAN ALAT Flow Chart Perancangan dan Pembuatan Alat. Mulai. Tinjauan pustaka
 59 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1. Flow Chart Perancangan dan Pembuatan Alat Mulai Tinjauan pustaka Simulasi dan perancangan alat untuk pengendali kecepatan motor DC dengan kontroler PID analog
59 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1. Flow Chart Perancangan dan Pembuatan Alat Mulai Tinjauan pustaka Simulasi dan perancangan alat untuk pengendali kecepatan motor DC dengan kontroler PID analog
COMPARISON OF PID TUNING METHODS OF THE DC MOTOR SPEED CONTROL USING PROGRAMABLE LOGIC CONTROLER
 Techno, ISSN 141-867 Volume 17 No. 1, April 216 Hal. 33 42 PERBANDINGAN METODE TUNING PIDPADA PENGATURAN KECEPATAN MOTOR DC BERBASIS PROGRAMABLE LOGIC CONTROLER COMPARISON OF PID TUNING METHODS OF THE
Techno, ISSN 141-867 Volume 17 No. 1, April 216 Hal. 33 42 PERBANDINGAN METODE TUNING PIDPADA PENGATURAN KECEPATAN MOTOR DC BERBASIS PROGRAMABLE LOGIC CONTROLER COMPARISON OF PID TUNING METHODS OF THE
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai gambaran alat, perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem kendali pendulum terbalik. 3.1.
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai gambaran alat, perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem kendali pendulum terbalik. 3.1.
Perancangan Sistem Kontrol Posisi Miniatur Plant Crane dengan Kontrol PID Menggunakan PLC
 88 ISSN 1979-2867 (print) Electrical Engineering Journal Vol. 5 (215) No. 2, pp. 88-17 Perancangan Sistem Kontrol Posisi Miniatur Plant Crane dengan Kontrol PID Menggunakan PLC E. Merry Sartika dan Hardi
88 ISSN 1979-2867 (print) Electrical Engineering Journal Vol. 5 (215) No. 2, pp. 88-17 Perancangan Sistem Kontrol Posisi Miniatur Plant Crane dengan Kontrol PID Menggunakan PLC E. Merry Sartika dan Hardi
PEMBUATAN SISTEM PENGATURAN PUTARAN MOTOR DC MENGGUNAKAN KONTROL PROPORTIONAL-INTEGRAL-DERIVATIVE (PID) DENGAN MEMANFAATKAN SENSOR KMZ51
 DENGAN MEMANFAATKAN SENSOR KMZ51") Jurnal MIPA 35 (2): 130-139 (2012) Jurnal MIPA http://journal.unnes.ac.id/sju/index.php/jm PEMBUATAN SISTEM PENGATURAN PUTARAN MOTOR DC MENGGUNAKAN KONTROL PROPORTIONAL-INTEGRAL-DERIVATIVE (PID) DENGAN
Jurnal MIPA 35 (2): 130-139 (2012) Jurnal MIPA http://journal.unnes.ac.id/sju/index.php/jm PEMBUATAN SISTEM PENGATURAN PUTARAN MOTOR DC MENGGUNAKAN KONTROL PROPORTIONAL-INTEGRAL-DERIVATIVE (PID) DENGAN
BAB I PENDAHULUAN. manfaat, baik itu pada bumi dan pada manusia secara tidak langsung [2].
![BAB I PENDAHULUAN. manfaat, baik itu pada bumi dan pada manusia secara tidak langsung [2].](/thumbs/72/67889762.jpg "BAB I PENDAHULUAN. manfaat, baik itu pada bumi dan pada manusia secara tidak langsung [2].") BAB I PENDAHULUAN 1.1 Latar Belakang Matahari adalah salah satu fenomena alam yang memiliki manfaat bagi kelangsungan makhluk hidup di bumi. Intensitas radiasi matahari merupakan salah satu fenomena fisis
BAB I PENDAHULUAN 1.1 Latar Belakang Matahari adalah salah satu fenomena alam yang memiliki manfaat bagi kelangsungan makhluk hidup di bumi. Intensitas radiasi matahari merupakan salah satu fenomena fisis
DAFTAR ISI. LEMBAR PENGESAHAN PEMBIMBING... Error! Bookmark not defined. LEMBAR PERNYATAAN KEASLIAN... iii. LEMBAR PENGESAHAN PENGUJI...
 DAFTAR ISI COVER...i LEMBAR PENGESAHAN PEMBIMBING... Error! Bookmark not defined. LEMBAR PERNYATAAN KEASLIAN... iii LEMBAR PENGESAHAN PENGUJI... iv HALAMAN PERSEMBAHAN... v HALAMAN MOTTO... vi KATA PENGANTAR...
DAFTAR ISI COVER...i LEMBAR PENGESAHAN PEMBIMBING... Error! Bookmark not defined. LEMBAR PERNYATAAN KEASLIAN... iii LEMBAR PENGESAHAN PENGUJI... iv HALAMAN PERSEMBAHAN... v HALAMAN MOTTO... vi KATA PENGANTAR...
JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER
 Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta 24 08 100 068 Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK
Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta 24 08 100 068 Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK
BAB III PERANCANGAN DAN PEMBUATAN. memungkinkan terjadinya kegagalan atau kurang memuaskan kerja alat yang telah dibuat.
 BAB III PERANCANGAN DAN PEMBUATAN 3.1 Perancangan Peranvangan merupakan suatu langkah kerja yang penting dalam penyusunan dan pembuatan alat dalam proyek akhir ini, sebab tanpa adanya perancangan yang
BAB III PERANCANGAN DAN PEMBUATAN 3.1 Perancangan Peranvangan merupakan suatu langkah kerja yang penting dalam penyusunan dan pembuatan alat dalam proyek akhir ini, sebab tanpa adanya perancangan yang
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO
 KEMETERIA PEDIDIKA DA KEBUDAYAA UIVERSITAS BRAWIJAYA FAKULTAS TEKIK JURUSA TEKIK ELEKTRO Jalan MT Haryono 167 Telp & Fax. 0341 554166 Malang 65145 KODE PJ-01 PEGESAHA PUBLIKASI HASIL PEELITIA SKRIPSI JURUSA
KEMETERIA PEDIDIKA DA KEBUDAYAA UIVERSITAS BRAWIJAYA FAKULTAS TEKIK JURUSA TEKIK ELEKTRO Jalan MT Haryono 167 Telp & Fax. 0341 554166 Malang 65145 KODE PJ-01 PEGESAHA PUBLIKASI HASIL PEELITIA SKRIPSI JURUSA
JOBSHEET 5. Motor Servo dan Mikrokontroller
 JOBSHEET 5 Motor Servo dan Mikrokontroller A. Tujuan Mahasiswa mampu merangkai motor servo dengan mikrokontroller Mahasiswa mampu menggerakkan motor servo dengan mikrokontroller B. Dasar Teori MOTOR SERVO
JOBSHEET 5 Motor Servo dan Mikrokontroller A. Tujuan Mahasiswa mampu merangkai motor servo dengan mikrokontroller Mahasiswa mampu menggerakkan motor servo dengan mikrokontroller B. Dasar Teori MOTOR SERVO
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi sistem yang dibuat. Gambar 3.1 menunjukkan blok diagram sistem secara keseluruhan. Anak Tangga I Anak Tangga II Anak
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi sistem yang dibuat. Gambar 3.1 menunjukkan blok diagram sistem secara keseluruhan. Anak Tangga I Anak Tangga II Anak
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM
 PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM Fandy Hartono 1 2203 100 067 Dr. Tri Arief Sardjono, ST. MT. 2-1970 02 12 1995 12 1001 1 Penulis, Mahasiswa S-1
PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM Fandy Hartono 1 2203 100 067 Dr. Tri Arief Sardjono, ST. MT. 2-1970 02 12 1995 12 1001 1 Penulis, Mahasiswa S-1
PERANCANGAN ROBOT OKTAPOD DENGAN DUA DERAJAT KEBEBASAN ASIMETRI
 Asrul Rizal Ahmad Padilah 1, Taufiq Nuzwir Nizar 2 1,2 Jurusan Teknik Komputer Unikom, Bandung 1 asrul1423@gmail.com, 2 taufiq.nizar@gmail.com ABSTRAK Salah satu kelemahan robot dengan roda sebagai alat
Asrul Rizal Ahmad Padilah 1, Taufiq Nuzwir Nizar 2 1,2 Jurusan Teknik Komputer Unikom, Bandung 1 asrul1423@gmail.com, 2 taufiq.nizar@gmail.com ABSTRAK Salah satu kelemahan robot dengan roda sebagai alat
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT 3.1 Perancangan Alat Perancangan merupakan suatu tahap yang sangat penting dalam pembuatan suatu alat, sebab dengan menganalisa komponen yang digunakan maka alat yang akan dibuat
BAB III PERANCANGAN ALAT 3.1 Perancangan Alat Perancangan merupakan suatu tahap yang sangat penting dalam pembuatan suatu alat, sebab dengan menganalisa komponen yang digunakan maka alat yang akan dibuat
RANCANG BANGUN SIMULATOR CNC MULTIAXIS DENGAN MOTOR STEPPER AC
 TUGAS AKHIR RANCANG BANGUN SIMULATOR CNC MULTIAXIS DENGAN MOTOR STEPPER AC TENANG DWI WIBOWO 2110 030 041 Dosen Pembimbing: Ir. Winarto, DEA Program Studi D3 Teknik Mesin Fakultas Teknologi Industri Institut
TUGAS AKHIR RANCANG BANGUN SIMULATOR CNC MULTIAXIS DENGAN MOTOR STEPPER AC TENANG DWI WIBOWO 2110 030 041 Dosen Pembimbing: Ir. Winarto, DEA Program Studi D3 Teknik Mesin Fakultas Teknologi Industri Institut
BAB III RANGKAIAN PENGENDALI DAN PROGRAM PENGENDALI SIMULATOR MESIN PEMBEGKOK
 BAB III RANGKAIAN PENGENDALI DAN PROGRAM PENGENDALI SIMULATOR MESIN PEMBEGKOK Pada bab ini dibahas tentang perangkat mekanik simulator mesin pembengkok, konstruksi motor DC servo, konstruksi motor stepper,
BAB III RANGKAIAN PENGENDALI DAN PROGRAM PENGENDALI SIMULATOR MESIN PEMBEGKOK Pada bab ini dibahas tentang perangkat mekanik simulator mesin pembengkok, konstruksi motor DC servo, konstruksi motor stepper,
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan Alat Pengaduk Adonan Kue ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan tersebut antara
BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan Alat Pengaduk Adonan Kue ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan tersebut antara
V. HASIL DAN PEMBAHASAN
 V. HASIL DAN PEMBAHASAN Semua mekanisme yang telah berhasil dirancang kemudian dirangkai menjadi satu dengan sistem kontrol. Sistem kontrol yang digunakan berupa sistem kontrol loop tertutup yang menjadikan
V. HASIL DAN PEMBAHASAN Semua mekanisme yang telah berhasil dirancang kemudian dirangkai menjadi satu dengan sistem kontrol. Sistem kontrol yang digunakan berupa sistem kontrol loop tertutup yang menjadikan