Perilaku Kamera Untuk Pengambilan Sudut Pandang Otomatis Menggunakan Metode
|
|
|
- Yenny Budiaman
- 6 tahun lalu
- Tontonan:
Transkripsi

1 Perilaku Kamera Untuk Pengambilan Sudut Pandang Otomatis Menggunakan Metode Knowledge-Based System Prananto Yuwono PROGRAM MAGISTER BIDANG KEAHLIAN JARINGAN CERDAS MULTIMEDIA JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
2 abstrak Pengambilan gambar sudut pandang secara otomatispadakameravirtual padagame RTS Pengambilan keputusan kamera virtual untuk sudut pandang terbaik menggunakan knowledgebased system berupa if-then sederhana dan ditambahkan fuzzy logic didalamnya Menggunakan 3D game studio
3 LatarBelakang Membuat penataan grafis yang lebih dinamis dan otomatis Ingin membuat pengambilan gambar dari sudutpandangyang baikdariadeganyang menarik
4 PerumusanMasalah banyak nya faktor-faktor yg dapat mempengaruhi pengambilan keputusan Pemilihan pengambilan tindakan yg tepat Digunakan knowledge-based system untuk mengambil keputusan ditambahkan fuzzy logic untuk memperhalus proses pemilihan keputusan
5 Tujuan Melakukan penelitian dalam mengambil sudutpandangdangambarterbaikdarigame peperangan mengimplementasikanknowledge based mengimplementasikanknowledge based system dalampengambilankeputusanyang didalam nya ditambahkan fuzzy logic
6 ManfaatPenelitian Memberikan pilihan kepada game developer untuk menggunakan perilaku kamera berbasis knowledge based dalam pengambilan keputusan visual grafis yang baik.


7 Metodepenelitian
8 Diagram alirpenelitian

9 Ilustrasikamera
10 MenentukanSudutPandang Kamera Ketinggia kamera, ketinggian kamera disini dalam game diwakili oleh nilai Z, yang merupakan adalahkordinatdarigrafis3d tersebut, contoh: Z= Sudut kemiringan kamera, dalam game ini diwakiliolehnilaitiltyang berupasudutantara0 sampai-90 derajat, contoh: tilt = -30. Sudut rotasi kamera, dalam game diwakili oleh nilaipan yang berupasudutantara0 sampai360 derajat, contoh: pan = 360.
11 DesainFSM Agent
12 Pada posisi standby atau idle maka tidak terdeteksi suatu aksi apapun dan state normal. Pada posisi menyerang atau attack maka state akan terdeteksi bahwa ada musuh didepan maka disini akan di pilih keputusan kamera akan menentukan sudut pandangnya dari arah musuh. Pada posisi follow the leader maka state akan terdeteksi bahwasedangadadidalamformasimakadisiniakandi pilih keputusan kamera akan naik ke sudut 45 derajat sehingga lebih terlihat sudut pandang yang lebih tinggi. Pada posisi state agent mati maka kamera juga akan brubah naik ke atas dan berubah sudut menjadi 90 derajat.
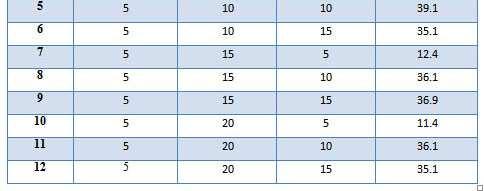
13 MenentukanAturan IF musuh= 1THEN kamera= 20 derajat IF musuh= 1AND kesehatan= 0THEN kamera= 90 derajat IF musuh= 1AND jumlah= 15THEN kamera= 45 derajat IF musuh= 1AND jumlah= 1THEN kamera= 20 derajat IF musuh = 0THEN kamera= 20 derajat IF musuh = 1 AND jarak= 5AND jumlah= 15 THEN kamera= 30 derajat


14 DesainLogikaFuzzy

15 Input output fuzzy


16 Input kesehatan


17 Input jarak

18 Input jumlah


19 Output sudutpandang


20 Rule yang digunakanuntukfuzzy

21 Pengujian1
22 grafik1


23 PengujianII
24 GrafikII
25 PengujianIII
26 GrafikIII
27 kesimpulan Dari hasil berbagai macam skenario percobaan tersebut, maka dapat disimpulkan beberapa hal, yaitu: knowledge-based system dapat mengambil keputusan dengan baik dalam kondisi yang sudah ditentukan. Tetapi sebatas kondisi itu saja. Jika mendeteksi musuh kamera langsung berubah ke sudut 30 derajat, jika matikameralangsungberubahke90 derajat. Fuzzy memberikan banyak variasi sudut pandang kamera dengan parameter-parameter yg sudah ditentukan. Pada posisi mati jika tanpa fuzzy kamera langsung berubah ke sudut 90 derajat, tetapi dengan fuzzy pada saat mati berubah secara bervariasi antara sudut derajat. Perilaku kamera pada glorius combat ini dapat berubah sudut pandang secaraotomatisdarisudutyang sempit(< 45 derajat) sudutsedang(= 45 derajat) dan sudut lebar(> 45 derajat) lebih dinamis berdasarkan pada variabel kesehatan, jarak musuh, dan jumlah musuh
28 Pemainsendiri


29 Single player : deteksidepan


30 Single player : matiatas


31 Single player : deteksidepanmatiatas


32 Single player : perangatas


33 Single player : perangatas1


34 Single player : matiperangatas
35 Dalamformasi


36 Formasi: deteksidepan


37 Formasi: matiatas


38 Formasi: perangatas


39 Formasi: matibawah


40 Formasi: matiatas

41 TERIMA KASIH
Perilaku Kamera Untuk Pengambilan Sudut pandang Otomatis Menggunakan Metode Knowledge-Based System
 Perilaku Kamera Untuk Pengambilan Sudut pandang Otomatis Menggunakan Metode Knowledge-Based System Prananto Yuwono 1) Moch. Hariadi 2) Supeno Mardi S. N 3) 1) Jurusan Teknik Elektro ITS, Surabaya 60111,
Perilaku Kamera Untuk Pengambilan Sudut pandang Otomatis Menggunakan Metode Knowledge-Based System Prananto Yuwono 1) Moch. Hariadi 2) Supeno Mardi S. N 3) 1) Jurusan Teknik Elektro ITS, Surabaya 60111,
Manuver Kelompok NPC Berbasis Boids
 Manuver Kelompok NPC Berbasis Boids Pengembangan Game Real Time Strategy Yonly Adrianus Benufinit 1, Moch. Hariadi 2, Supeno Mardi S. N 3 Mahasiswa Program Pasca Sarjana, Jurusan Teknik Elektro, Fakultas
Manuver Kelompok NPC Berbasis Boids Pengembangan Game Real Time Strategy Yonly Adrianus Benufinit 1, Moch. Hariadi 2, Supeno Mardi S. N 3 Mahasiswa Program Pasca Sarjana, Jurusan Teknik Elektro, Fakultas
PERILAKU OTONOM DAN ADAPTIF NON PLAYER CHARACTER MUSUH PADA GAME 3 DIMENSI MENGGUNAKAN FUZZY STATE MACHINE DAN RULE BASED SYSTEM
 PERILAKU OTONOM DAN ADAPTIF NON PLAYER CHARACTER MUSUH PADA GAME 3 DIMENSI MENGGUNAKAN FUZZY STATE MACHINE DAN RULE BASED SYSTEM Fahrul Pradhana Putra 1, Ahmad Zainul Fanani 2,Moch. Hariadi 3 1 Magister
PERILAKU OTONOM DAN ADAPTIF NON PLAYER CHARACTER MUSUH PADA GAME 3 DIMENSI MENGGUNAKAN FUZZY STATE MACHINE DAN RULE BASED SYSTEM Fahrul Pradhana Putra 1, Ahmad Zainul Fanani 2,Moch. Hariadi 3 1 Magister
PERANCANGAN GAME TURN BASED STARATEGY MENGGUNAKAN LOGIKA FUZZY UNTUK MENGATUR PERILAKU MUSUH
 PERANCANGAN GAME TURN BASED STARATEGY MENGGUNAKAN LOGIKA FUZZY UNTUK MENGATUR PERILAKU MUSUH Andi Fitrawan Dwi Pratama 1, Husaini 2 Jurusan Teknologi Informasi dan Komputer, Program Studi Teknik Multimedia
PERANCANGAN GAME TURN BASED STARATEGY MENGGUNAKAN LOGIKA FUZZY UNTUK MENGATUR PERILAKU MUSUH Andi Fitrawan Dwi Pratama 1, Husaini 2 Jurusan Teknologi Informasi dan Komputer, Program Studi Teknik Multimedia
EKO TRI WASISTO Dosen Pembimbing 1 Dosen Pembimbing 2
 RANCANG BANGUN SISTEM KONTROL ATTITUDE PADA UAV (UNMANNED AERIAL VEHICLE) QUADROTOR DF- UAV01 DENGAN MENGGUNAKAN SENSOR ACCELEROMETER 3-AXIS DENGAN METODE FUZZY LOGIC EKO TRI WASISTO 2407.100.065 Dosen
RANCANG BANGUN SISTEM KONTROL ATTITUDE PADA UAV (UNMANNED AERIAL VEHICLE) QUADROTOR DF- UAV01 DENGAN MENGGUNAKAN SENSOR ACCELEROMETER 3-AXIS DENGAN METODE FUZZY LOGIC EKO TRI WASISTO 2407.100.065 Dosen
BAB I PENDAHULUAN. Kegiatan videografi saat ini sangat dituntut untuk dapat menghasilkan
 BAB I PENDAHULUAN 1.1 Latar Belakang Kegiatan videografi saat ini sangat dituntut untuk dapat menghasilkan gambar atau rekaman video yang rapi dan stabil. Namun untuk menghasilkan rekaman video yang stabil
BAB I PENDAHULUAN 1.1 Latar Belakang Kegiatan videografi saat ini sangat dituntut untuk dapat menghasilkan gambar atau rekaman video yang rapi dan stabil. Namun untuk menghasilkan rekaman video yang stabil
BAB 1 PENDAHULUAN. 1.1 Latar Belakang Masalah
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Masalah Majunya teknologi informasi merupakan suatu perkembangan yang memberikan akses terhadap perubahan kehidupan masyarakat. Dunia informasi menjadi salah satu wilayah
BAB 1 PENDAHULUAN 1.1 Latar Belakang Masalah Majunya teknologi informasi merupakan suatu perkembangan yang memberikan akses terhadap perubahan kehidupan masyarakat. Dunia informasi menjadi salah satu wilayah
BAB IV HASIL PENGUJIAN DAN ANALISIS
 BAB IV HASIL PENGUJIAN DAN ANALISIS Membahas hasil pengujian algoritma yang dirancang dan analisa. 4.1. Pengujian Penentuan Lokasi 4.1.1. Pengujian Posisi Robot di Lapangan Mengacu pada Tiang Gawang Musuh
BAB IV HASIL PENGUJIAN DAN ANALISIS Membahas hasil pengujian algoritma yang dirancang dan analisa. 4.1. Pengujian Penentuan Lokasi 4.1.1. Pengujian Posisi Robot di Lapangan Mengacu pada Tiang Gawang Musuh
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api
 Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
Implementasi Artificial Intelligence pada game Defender of Metal City dengan menggunakan Finite State Machine
 JURNAL TEKNIK POMITS Vol. 6, No. 2, (2017) ISSN: 2337-3539 (2301-9271 Print) A-717 Implementasi Artificial Intelligence pada game Defender of Metal City dengan menggunakan Finite State Machine Billy, Imam
JURNAL TEKNIK POMITS Vol. 6, No. 2, (2017) ISSN: 2337-3539 (2301-9271 Print) A-717 Implementasi Artificial Intelligence pada game Defender of Metal City dengan menggunakan Finite State Machine Billy, Imam
2014 IMPLEMENTASI FUZZY LOGIC METODE MAMDANI UNTUK PENGEMBANGAN INTELLIGENT NON- PLAYER CHARACTER PADA GAME STRATEGY
 BAB I PENDAHULUAN 1.1 Latar Belakang Berkembangnya perangkat teknologi informasi dan komunikasi seperti smartphone dan personal computer (PC) membuat perkembangan game semakin maju. Selain itu tumbuh pesatnya
BAB I PENDAHULUAN 1.1 Latar Belakang Berkembangnya perangkat teknologi informasi dan komunikasi seperti smartphone dan personal computer (PC) membuat perkembangan game semakin maju. Selain itu tumbuh pesatnya
TUGAS PRAKTIKUM SISTEM CERDAS
 TUGAS PRAKTIKUM SISTEM CERDAS Modul III Penerapan Logika Fuzzy Dengan Matlab Tanggal 17 November 2015 Disusun Oleh : Fahmi Ahmad Husaeni (201302025) Dosen Pengampu : E. Agung Nugroho S.T, M.T Program Studi
TUGAS PRAKTIKUM SISTEM CERDAS Modul III Penerapan Logika Fuzzy Dengan Matlab Tanggal 17 November 2015 Disusun Oleh : Fahmi Ahmad Husaeni (201302025) Dosen Pengampu : E. Agung Nugroho S.T, M.T Program Studi
PREDIKSI KECEPATAN ROTASI KOMPRESOR MESIN PESAWAT BOEING MENGGUNAKAN LOGIKA FUZZY
 Seminar Tugas Akhir PREDIKSI KECEPATAN ROTASI KOMPRESOR MESIN PESAWAT BOEING 737-300 MENGGUNAKAN LOGIKA FUZZY O L E H : N U R R O H MAN A N D I K A R D I A N P E M BIMBING : D R. I R. A U L I A S I T I
Seminar Tugas Akhir PREDIKSI KECEPATAN ROTASI KOMPRESOR MESIN PESAWAT BOEING 737-300 MENGGUNAKAN LOGIKA FUZZY O L E H : N U R R O H MAN A N D I K A R D I A N P E M BIMBING : D R. I R. A U L I A S I T I
Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini. Helmi Wiratran
 Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini 1 Helmi Wiratran 2209105020 2 Latarbelakang (1) Segway PT: Transportasi alternatif dengan
Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini 1 Helmi Wiratran 2209105020 2 Latarbelakang (1) Segway PT: Transportasi alternatif dengan
DESAIN AUGMENTED REALITY ORIGAMI BERBASIS METODE LOGIKA FUZZY
 DESAIN AUGMENTED REALITY ORIGAMI BERBASIS METODE LOGIKA FUZZY CACIK SUCI ASTUTI (2209205211) DOSEN PEMBIMBING : Mochammad Hariadi, ST, MSc, PhD. Christyowidiasmoro, ST, MT Pendahuluan Pembelajaran Origami
DESAIN AUGMENTED REALITY ORIGAMI BERBASIS METODE LOGIKA FUZZY CACIK SUCI ASTUTI (2209205211) DOSEN PEMBIMBING : Mochammad Hariadi, ST, MSc, PhD. Christyowidiasmoro, ST, MT Pendahuluan Pembelajaran Origami
Abdul Halim Dosen Pembimbing Dr. Trihastuti Agustinah, ST., MT
 Abdul Halim 22 05 053 Dosen Pembimbing Dr. Trihastuti Agustinah, ST., T JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 203 PENDAHULUAN PERANCANGAN HASIL
Abdul Halim 22 05 053 Dosen Pembimbing Dr. Trihastuti Agustinah, ST., T JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 203 PENDAHULUAN PERANCANGAN HASIL
DESAIN SIMULASI PENGAMBILAN KEPUTUSAN MULTIOBJECTIVE MENGGUNAKAN AGEN CERDAS
 DESAIN SIMULASI PENGAMBILAN KEPUTUSAN MULTIOBJECTIVE MENGGUNAKAN AGEN CERDAS Mohamad Iman Prajitno 1, Bambang Wahyu W 2, Muh. Chosyi'in 3, Supeno Mardi S 4, Moch. Hariadi 5 Pasca Sarjana Jurusan Teknik
DESAIN SIMULASI PENGAMBILAN KEPUTUSAN MULTIOBJECTIVE MENGGUNAKAN AGEN CERDAS Mohamad Iman Prajitno 1, Bambang Wahyu W 2, Muh. Chosyi'in 3, Supeno Mardi S 4, Moch. Hariadi 5 Pasca Sarjana Jurusan Teknik
DESAIN FUZZY STATE MACHINE UNTUK MENGHASILKAN VARIASI RESPON NPC (NON-PLAYABLE CHARACTER) PADA SEBUAH GAME
 PADA SEBUAH GAME") DESAIN FUZZY STATE MACHINE UNTUK MENGHASILKAN VARIASI RESPON NPC (NON-PLAYABLE CHARACTER) PADA SEBUAH GAME Surya Adi Wijaya 1, Susi Juniastuti 2, Supen Mardi SN 3, Mch. Hariadi 4 Pasca Sarjana Jurusan
DESAIN FUZZY STATE MACHINE UNTUK MENGHASILKAN VARIASI RESPON NPC (NON-PLAYABLE CHARACTER) PADA SEBUAH GAME Surya Adi Wijaya 1, Susi Juniastuti 2, Supen Mardi SN 3, Mch. Hariadi 4 Pasca Sarjana Jurusan
SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI
 SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI Jourdan Septiansyah Efflan NRP. 2209100084 Dosen Pembimbing Ronny Mardiyanto, ST.,MT.,Ph.D. Ir. Djoko Purwanto,M.Eng.,Ph.D. JURUSAN
SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI Jourdan Septiansyah Efflan NRP. 2209100084 Dosen Pembimbing Ronny Mardiyanto, ST.,MT.,Ph.D. Ir. Djoko Purwanto,M.Eng.,Ph.D. JURUSAN
VISUALISASI GERAKAN OBJEK 3D PADA AUGMENTED REALITY DENGAN DETEKSI TUMBUKAN BERBASIS BOUNDING BOX
 VISUALISASI GERAKAN OBJEK 3D PADA AUGMENTED REALITY DENGAN DETEKSI TUMBUKAN BERBASIS BOUNDING BOX Adhi Arsandi 2208205734 PROGRAM MAGISTER BIDANG KEAHLIAN JARINGAN CERDAS MULTIMEDIA (TEKNOLOGI PERMAINAN)
VISUALISASI GERAKAN OBJEK 3D PADA AUGMENTED REALITY DENGAN DETEKSI TUMBUKAN BERBASIS BOUNDING BOX Adhi Arsandi 2208205734 PROGRAM MAGISTER BIDANG KEAHLIAN JARINGAN CERDAS MULTIMEDIA (TEKNOLOGI PERMAINAN)
OPTIMISASI TOTAL TEMPUH NPC PADA RTS GAME MENGGUNAKAN HARMONY SEARCH ALGORITHM. Herti Miawarni 1* Jl. A. Yani 114, Surabaya 60231, Telp.
 OPTIMISASI TOTAL TEMPUH NPC PADA RTS GAME MENGGUNAKAN HARMONY SEARCH ALGORITHM Herti Miawarni 1* 1 Program Studi Teknik Elektro, Fakultas Teknik, Universitas Bhayangkara Surabaya Jl. A. Yani 114, Surabaya
OPTIMISASI TOTAL TEMPUH NPC PADA RTS GAME MENGGUNAKAN HARMONY SEARCH ALGORITHM Herti Miawarni 1* 1 Program Studi Teknik Elektro, Fakultas Teknik, Universitas Bhayangkara Surabaya Jl. A. Yani 114, Surabaya
BAB 3 PERANCANGAN PROGRAM APLIKASI
 BAB 3 PERANCANGAN PROGRAM APLIKASI 3.1 Rancangan Aplikasi Program aplikasi motion detection yang akan dirancang memiliki struktur hirarki di mana terdapat 3 sub menu dari menu utamanya yaitu sub menu file,
BAB 3 PERANCANGAN PROGRAM APLIKASI 3.1 Rancangan Aplikasi Program aplikasi motion detection yang akan dirancang memiliki struktur hirarki di mana terdapat 3 sub menu dari menu utamanya yaitu sub menu file,
STRATEGI MENYERANG NPC GAME FPS MENGGUNAKAN FUZZY FINITE STATE MACHINE Ady Wicaksono 1), Mochamad Hariadi 2), Supeno Mardi S. N 3)
, Mochamad Hariadi 2), Supeno Mardi S. N 3)") STRATEGI MENYERANG NPC GAME FPS MENGGUNAKAN FUZZY FINITE STATE MACHINE Ady Wicaksono 1), Mochamad Hariadi 2), Supeno Mardi S. N 3) 1) Pasca Sarjana Teknik Elektro ITS, Surabaya 60111 2) Jurusan Teknik
STRATEGI MENYERANG NPC GAME FPS MENGGUNAKAN FUZZY FINITE STATE MACHINE Ady Wicaksono 1), Mochamad Hariadi 2), Supeno Mardi S. N 3) 1) Pasca Sarjana Teknik Elektro ITS, Surabaya 60111 2) Jurusan Teknik
Oleh: Denis Ahmad G ( ) Pembimbing:
 Pembimbing:") SISTEM PENDUKUNG KEPUTUSAN PENILAIAN POTENSI PEGAWAI DENGAN METODE FUZZY GAP ANALISIS UNTUK PROSES PROMOSI JABATAN PADA PT TELKOM RESEARCH AND DEVELOPMENT CENTER BANDUNG Pembimbing: Wiwik Anggraeni, S.Si,
SISTEM PENDUKUNG KEPUTUSAN PENILAIAN POTENSI PEGAWAI DENGAN METODE FUZZY GAP ANALISIS UNTUK PROSES PROMOSI JABATAN PADA PT TELKOM RESEARCH AND DEVELOPMENT CENTER BANDUNG Pembimbing: Wiwik Anggraeni, S.Si,
BAB 1 PENDAHULUAN 1.1. Latar Belakang Masalah
 BAB 1 PENDAHULUAN 1.1. Latar Belakang Masalah Seiring dengan perkembangan teknologi komputer dan selular yang sedang terjadi sekarang ini, alat komunikasi merupakan suatu kebutuhan yang harus terpenuhi.
BAB 1 PENDAHULUAN 1.1. Latar Belakang Masalah Seiring dengan perkembangan teknologi komputer dan selular yang sedang terjadi sekarang ini, alat komunikasi merupakan suatu kebutuhan yang harus terpenuhi.
DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID BERBASIS PLC PADA SISTEM KONTROL LEVEL CAIRAN COUPLED-TANK
 TUGAS AKHIR TE091399 Teknik Sistem Pengaturan Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013 DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID
TUGAS AKHIR TE091399 Teknik Sistem Pengaturan Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013 DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID
Kompleksitas Algoritma A* Pada Implementasi PassiveAI Untuk Game Mobile AI
 Kompleksitas Algoritma A* Pada Implementasi PassiveAI Untuk Game Mobile AI Dandy Akhmad Rahadiansyah 23514098 1 Program Magister Informatika Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung,
Kompleksitas Algoritma A* Pada Implementasi PassiveAI Untuk Game Mobile AI Dandy Akhmad Rahadiansyah 23514098 1 Program Magister Informatika Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung,
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN 3.1 Desain penelitian Tahap Analisis Studi Literatur Data Penelitian Tahap Perancangan Desain Sistem Fuzzy Mamdani Tahap Pengembangan Pembangunan Perangkat Lunak Tahap Pengujian
BAB III METODE PENELITIAN 3.1 Desain penelitian Tahap Analisis Studi Literatur Data Penelitian Tahap Perancangan Desain Sistem Fuzzy Mamdani Tahap Pengembangan Pembangunan Perangkat Lunak Tahap Pengujian
Tahap Sistem Pakar Berbasis Fuzzy
 Company LOGO Penalaran Mamdani dan Tsukamoto Pada pendekatan Fuzzy Inference System Departemen Ilmu Komputer Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Pertanian Bogor 2011 www.company.com
Company LOGO Penalaran Mamdani dan Tsukamoto Pada pendekatan Fuzzy Inference System Departemen Ilmu Komputer Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Pertanian Bogor 2011 www.company.com
Penerapan Fuzzy Logic untuk Pembatasan Jumlah Partikel Pada Aplikasi yang Menggunakan Sistem Partikel
 Penerapan Fuzzy Logic untuk Pembatasan Jumlah Partikel Pada Aplikasi yang Menggunakan Sistem Partikel Biolardi Yoshogi (13509035) Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika
Penerapan Fuzzy Logic untuk Pembatasan Jumlah Partikel Pada Aplikasi yang Menggunakan Sistem Partikel Biolardi Yoshogi (13509035) Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika
Fuzzy Associative Memory (FAM) Logika Fuzzy
 Logika Fuzzy") Fuzzy Associative Memory (FAM) Logika Fuzzy 1 Misalkan suatu sistem fuzzy dengan n input dan satu output. Setiap input X1, X2,, Xn dipartisi menjadi k partisi fuzzy. Maka menggunakan aturan fuzzy IF THEN..
Fuzzy Associative Memory (FAM) Logika Fuzzy 1 Misalkan suatu sistem fuzzy dengan n input dan satu output. Setiap input X1, X2,, Xn dipartisi menjadi k partisi fuzzy. Maka menggunakan aturan fuzzy IF THEN..
1. Pendahuluan 1.1 Latar belakang
 1. Pendahuluan 1.1 Latar belakang Diabetes mellitus adalah suatu penyakit dimana kadar glukosa (gula sederhana) di dalam darah tinggi karena tubuh tidak dapat melepaskan atau menggunakan insulin secara
1. Pendahuluan 1.1 Latar belakang Diabetes mellitus adalah suatu penyakit dimana kadar glukosa (gula sederhana) di dalam darah tinggi karena tubuh tidak dapat melepaskan atau menggunakan insulin secara
PERANCANGAN SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS BERBASIS LOGIKA FUZZY MENGGUNAKAN SENSOR KAMERA
 Seminar Tugas Akhir PERANCANGAN SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS BERBASIS LOGIKA FUZZY MENGGUNAKAN SENSOR KAMERA Oleh : Andri Kuncoro NRP. 2406100042 Dosen Pembimbing : Ir. Moch. Ilyas Hs. NIP.194909191979031002
Seminar Tugas Akhir PERANCANGAN SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS BERBASIS LOGIKA FUZZY MENGGUNAKAN SENSOR KAMERA Oleh : Andri Kuncoro NRP. 2406100042 Dosen Pembimbing : Ir. Moch. Ilyas Hs. NIP.194909191979031002
Rancang Bangun Sistem Pelacakan Obyek Menggunakan CCTV dan Webcam. Kampus ITS, Surabaya
 Rancang Bangun Sistem Pelacakan Obyek Menggunakan CCTV dan Webcam Choirul Umul Islami 1, Mike Yuliana 2, Akuwan Shaleh 2 1 Mahasiswa Politeknik Elektronika Negeri Surabaya, Jurusan Teknik Telekomunikasi
Rancang Bangun Sistem Pelacakan Obyek Menggunakan CCTV dan Webcam Choirul Umul Islami 1, Mike Yuliana 2, Akuwan Shaleh 2 1 Mahasiswa Politeknik Elektronika Negeri Surabaya, Jurusan Teknik Telekomunikasi
BAB 3 PERANCANGAN SISTEM
 BAB 3 PERANCANGAN SISTEM 3.1 Perancangan Sistem Secara Umum Sistem pada penelitian ini akan menyeimbangkan posisi penampang robot dengan mengenal perubahan posisi dan kemudian mengatur kecepatan. Setiap
BAB 3 PERANCANGAN SISTEM 3.1 Perancangan Sistem Secara Umum Sistem pada penelitian ini akan menyeimbangkan posisi penampang robot dengan mengenal perubahan posisi dan kemudian mengatur kecepatan. Setiap
Aplikasi Fuzzy Logic pada Vacuum Cleaner
 Aplikasi Fuzzy Logic pada Vacuum Cleaner Dimas Tri Ciputra and 13509602 1 Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung, Jl. Ganesha 10 Bandung 40132,
Aplikasi Fuzzy Logic pada Vacuum Cleaner Dimas Tri Ciputra and 13509602 1 Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung, Jl. Ganesha 10 Bandung 40132,
Oleh : Abi Nawang Gustica Pembimbing : 1. Dr. Muhammad Rivai, ST., MT. 2. Ir. Tasripan, MT.
 Implementasi Sensor Gas pada Kontrol Lengan Robot untuk Mencari Sumber Gas (The Implementation of Gas Sensors on the Robotic Arm Control to Locate Gas Source ) Oleh : Abi Nawang Gustica Pembimbing : 1.
Implementasi Sensor Gas pada Kontrol Lengan Robot untuk Mencari Sumber Gas (The Implementation of Gas Sensors on the Robotic Arm Control to Locate Gas Source ) Oleh : Abi Nawang Gustica Pembimbing : 1.
PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER
 TUGAS AKHIR TE 091399 PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER 38-714 Nur Muhlis NRP 2208 100 662 JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut
TUGAS AKHIR TE 091399 PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER 38-714 Nur Muhlis NRP 2208 100 662 JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut
Pengaturan Perilaku Pasukan Non Player Character menggunakan metode Flocking Behavior berbasis Agent pada permainan Real Time Strategy
 1 Pengaturan Perilaku Pasukan Non Player Character menggunakan metode Flocking Behavior berbasis Agent pada permainan Real Time Strategy Priyodiva Robby Nugroho, Mochamad Hariadi, Christyowidiasmoro Teknik
1 Pengaturan Perilaku Pasukan Non Player Character menggunakan metode Flocking Behavior berbasis Agent pada permainan Real Time Strategy Priyodiva Robby Nugroho, Mochamad Hariadi, Christyowidiasmoro Teknik
BAB IV HASIL DAN UJI COBA. Aplikasi sistem pakar pendeteksikan kerusakan processor pada sistem
 BAB IV HASIL DAN UJI COBA IV.1. Tampilan Hasil Aplikasi sistem pakar pendeteksikan kerusakan processor pada sistem hardware yang digunakan di komputer atau dilaptop yang memiliki fungsi sebagai berikut
BAB IV HASIL DAN UJI COBA IV.1. Tampilan Hasil Aplikasi sistem pakar pendeteksikan kerusakan processor pada sistem hardware yang digunakan di komputer atau dilaptop yang memiliki fungsi sebagai berikut
Fuzzy Associative Memory (FAM) Logika Fuzzy
 Logika Fuzzy") Fuzzy Associative Memory (FAM) Logika Fuzzy 1 Misalkan suatu sistem fuzzy dengan n input dan satu output. Setiap input X 1, X 2,, X n dipartisi menjadi k partisi fuzzy. Maka menggunakan aturan fuzzy IF
Fuzzy Associative Memory (FAM) Logika Fuzzy 1 Misalkan suatu sistem fuzzy dengan n input dan satu output. Setiap input X 1, X 2,, X n dipartisi menjadi k partisi fuzzy. Maka menggunakan aturan fuzzy IF
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1
 1-6 1") JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Sistem Pemantau Ruangan Berbasis Multi Kamera untuk Smartphone Android pada Jaringan Pikonet yang Adaptif terhadap Perubahan Situasi Ruangan
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Sistem Pemantau Ruangan Berbasis Multi Kamera untuk Smartphone Android pada Jaringan Pikonet yang Adaptif terhadap Perubahan Situasi Ruangan
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Membicarakan tentang teknologi mobile sekarang ini tentu sudah sangat digemari. Pesatnya perkembangan berbagai program aplikasi yang dibutuhkan sangat cepat dan menarik,
BAB I PENDAHULUAN 1.1 Latar Belakang Membicarakan tentang teknologi mobile sekarang ini tentu sudah sangat digemari. Pesatnya perkembangan berbagai program aplikasi yang dibutuhkan sangat cepat dan menarik,
PENERAPAN ALGORITMA DIJKSTRA DAN FUZZY LOGIC SUGENO PADA GAME ZOMBIE SHOOTER
 IJCCS, Vol.x, No.x, Julyxxxx, pp. 1~5 ISSN: 1978-1520 1 PENERAPAN ALGORITMA DIJKSTRA DAN FUZZY LOGIC SUGENO PADA GAME ZOMBIE SHOOTER Andryano Pratama 1, Fadli Delta Rizky 2, Daniel Udjulawa 3 3 STMIK GI
IJCCS, Vol.x, No.x, Julyxxxx, pp. 1~5 ISSN: 1978-1520 1 PENERAPAN ALGORITMA DIJKSTRA DAN FUZZY LOGIC SUGENO PADA GAME ZOMBIE SHOOTER Andryano Pratama 1, Fadli Delta Rizky 2, Daniel Udjulawa 3 3 STMIK GI
Strategi Menyerang Jarak Dekat Menggunakan Klasifikasi Bayesian Pada NPC (Non Player Character)
") Strategi Menyerang Jarak Dekat Menggunakan Klasifikasi Bayesian Pada NPC (Non Player Character) Siti Asmiatun 1, Latius Hermawan 2, Tri Daryatni 3 Fakultas Ilmu Komputer, Universitas Dian Nuswantoro, Semarang
Strategi Menyerang Jarak Dekat Menggunakan Klasifikasi Bayesian Pada NPC (Non Player Character) Siti Asmiatun 1, Latius Hermawan 2, Tri Daryatni 3 Fakultas Ilmu Komputer, Universitas Dian Nuswantoro, Semarang
ROBOT PENGURAI ASAP DALAM RUANGAN MENGGUNAKAN T-BOX DENGAN METODE BEHAVIOUR BASED CONTROL
 ROBOT PENGURAI ASAP DALAM RUANGAN MENGGUNAKAN T-BOX DENGAN METODE BEHAVIOUR BASED CONTROL Anggara Trisna Nugraha 1),Ichal Haichal S 2) 1) Jurusan Teknik Elektro, Fakultas Teknik, Institut Teknologi Sepuluh
ROBOT PENGURAI ASAP DALAM RUANGAN MENGGUNAKAN T-BOX DENGAN METODE BEHAVIOUR BASED CONTROL Anggara Trisna Nugraha 1),Ichal Haichal S 2) 1) Jurusan Teknik Elektro, Fakultas Teknik, Institut Teknologi Sepuluh
PERANCANGAN GAME TURN BASED STRATEGY MENGGUNAKAN LOGIKA FUZZY DAN NAIVE BAYES CLASSIFIER
 PERANCANGAN GAME TURN BASED STRATEGY MENGGUNAKAN LOGIKA FUZZY DAN NAIVE BAYES CLASSIFIER Dery Fathurochman 1), Wina Witanti 2), Rezki Yuniarti 3) 1,2,3) Jurusan Teknik Informatika, Universitas Jenderal
PERANCANGAN GAME TURN BASED STRATEGY MENGGUNAKAN LOGIKA FUZZY DAN NAIVE BAYES CLASSIFIER Dery Fathurochman 1), Wina Witanti 2), Rezki Yuniarti 3) 1,2,3) Jurusan Teknik Informatika, Universitas Jenderal
Ahmadi *1), Richa Watiasih a), Ferry Wimbanu A a)
, Richa Watiasih a), Ferry Wimbanu A a)") Prosiding Seminar Nasional Teknologi Elektro Terapan 2017 Vol.01 No.01, ISSN: 2581-0049 Ahmadi *1), Richa Watiasih a), Ferry Wimbanu A a) Abstrak: Pada penelitian ini metode Fuzzy Logic diterapkan untuk
Prosiding Seminar Nasional Teknologi Elektro Terapan 2017 Vol.01 No.01, ISSN: 2581-0049 Ahmadi *1), Richa Watiasih a), Ferry Wimbanu A a) Abstrak: Pada penelitian ini metode Fuzzy Logic diterapkan untuk
LAMPIRAN. Lampiran 1 Pertanyaan yang Diajukan untuk Pengujian Game. Tempel hasil jawaban disini
 LAMPIRAN Lampiran 1 Pertanyaan yang Diajukan untuk Pengujian Game Tempel hasil jawaban disini xv Lampiran 2 Pertanyaan yang Diajukan untuk Menguji Aturan Fuzzy Uji Aturan Fuzzy Logic Metode Mamdani dengan
LAMPIRAN Lampiran 1 Pertanyaan yang Diajukan untuk Pengujian Game Tempel hasil jawaban disini xv Lampiran 2 Pertanyaan yang Diajukan untuk Menguji Aturan Fuzzy Uji Aturan Fuzzy Logic Metode Mamdani dengan
Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy
 ABSTRAK Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
ABSTRAK Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
Kecerdasan Buatan dalam Game untuk Merespon Emosi dari Teks Berbahasa Indonesia Menggunakan Klasifikasi Teks dan Logika Fuzzy
 Kecerdasan Buatan dalam Game untuk Merespon Emosi dari Teks Berbahasa Indonesia Menggunakan Klasifikasi Teks dan Logika Fuzzy Mitra Istiar Wardhana 1), Surya Sumpeno 2), Mochamad Hariadi 3) 1,2 Pasca Sarjana
Kecerdasan Buatan dalam Game untuk Merespon Emosi dari Teks Berbahasa Indonesia Menggunakan Klasifikasi Teks dan Logika Fuzzy Mitra Istiar Wardhana 1), Surya Sumpeno 2), Mochamad Hariadi 3) 1,2 Pasca Sarjana
BAB III PERANCANGAN Sistem Kontrol Robot. Gambar 3.1. Blok Diagram Sistem
 BAB III PERANCANGAN Pada bab ini akan dijelaskan mengenai perancangan sistem yang meliputi sistem kontrol logika fuzzy, perancangan perangkat keras robot, dan perancangan perangkat lunak dalam pengimplementasian
BAB III PERANCANGAN Pada bab ini akan dijelaskan mengenai perancangan sistem yang meliputi sistem kontrol logika fuzzy, perancangan perangkat keras robot, dan perancangan perangkat lunak dalam pengimplementasian
Fuzzy Expert Sistem. Departemen Ilmu Komputer Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Pertanian Bogor 2015
 Fuzzy Expert Sistem Departemen Ilmu Komputer Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Pertanian Bogor 2015 Ketentuan Praktikum Lembar Kerja Praktikum ini dibuat sebagai panduan bagi mahasiswa
Fuzzy Expert Sistem Departemen Ilmu Komputer Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Pertanian Bogor 2015 Ketentuan Praktikum Lembar Kerja Praktikum ini dibuat sebagai panduan bagi mahasiswa
ARTIFICIAL INTELLIGENCE
 ARTIFICIAL INTELLIGENCE APA YANG DIMAKSUD DENGAN ARTIFICIAL INTELLIGENT ( AI )? AI atau Kecerdasan Buatan atau Kecerdasan Tiruan adalah : Kemampuan suatu komputer melaksanakan kegiatan kegiatan yang biasanya
ARTIFICIAL INTELLIGENCE APA YANG DIMAKSUD DENGAN ARTIFICIAL INTELLIGENT ( AI )? AI atau Kecerdasan Buatan atau Kecerdasan Tiruan adalah : Kemampuan suatu komputer melaksanakan kegiatan kegiatan yang biasanya
PENERAPAN RULE BASED PADA GAME RAMBU SEFETY RIDING RODA DUA BERBASIS ANDROID TUGAS AKHIR
 PENERAPAN RULE BASED PADA GAME RAMBU SEFETY RIDING RODA DUA BERBASIS ANDROID TUGAS AKHIR Sebagai Persyaratan Guna Meraih Gelar Sarjana Strata 1 Teknik Informatika Universitas Muhammadiyah Malang Oleh :
PENERAPAN RULE BASED PADA GAME RAMBU SEFETY RIDING RODA DUA BERBASIS ANDROID TUGAS AKHIR Sebagai Persyaratan Guna Meraih Gelar Sarjana Strata 1 Teknik Informatika Universitas Muhammadiyah Malang Oleh :
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Logika fuzzy merupakan logika yang samar. Dimana pada logika fuzzy suatu nilai dapat bernilai true dan false secara bersamaan. Tingkat true atau false nilai
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Logika fuzzy merupakan logika yang samar. Dimana pada logika fuzzy suatu nilai dapat bernilai true dan false secara bersamaan. Tingkat true atau false nilai
Markerless Augmented Reality Pada Perangkat Android
 Markerless Augmented Reality Pada Perangkat Android Yoze Rizki - 2207 100 102 Pembimbing: Mochamad Hariadi, ST.,MSc.,PhD. Cristyowidiasmoro, ST.,MT., Department of Electrical Engineering Faculty of Industrial
Markerless Augmented Reality Pada Perangkat Android Yoze Rizki - 2207 100 102 Pembimbing: Mochamad Hariadi, ST.,MSc.,PhD. Cristyowidiasmoro, ST.,MT., Department of Electrical Engineering Faculty of Industrial
serta fungsi-fungsi yang mendukung kelas tersebut saat menjalankan state yang sedang aktif.
 serta fungsi-fungsi yang mendukung kelas tersebut saat menjalankan state yang sedang aktif. perancangan yang telah diperoleh dari tahapan sebelumnya. Untuk ilustrasinya, dapat dilihat pada Gambar 7. Implementasi
serta fungsi-fungsi yang mendukung kelas tersebut saat menjalankan state yang sedang aktif. perancangan yang telah diperoleh dari tahapan sebelumnya. Untuk ilustrasinya, dapat dilihat pada Gambar 7. Implementasi
SIMULASI MULTI-AGENT DENGAN HEXAGONAL GRID MENGGUNAKAN METODE KNOWLEDGE-BASED SYSTEM
 SIMULASI MULTI-AGENT DENGAN HEXAGONAL GRID MENGGUNAKAN METODE KNOWLEDGE-BASED SYSTEM Ibrohim Yofid Fananda 1 *, Mochamad Hariadi 2, Supeno Mardi 3 Pasca Elektro, Institut Teknologi Sepuluh Nopember Surabaya,
SIMULASI MULTI-AGENT DENGAN HEXAGONAL GRID MENGGUNAKAN METODE KNOWLEDGE-BASED SYSTEM Ibrohim Yofid Fananda 1 *, Mochamad Hariadi 2, Supeno Mardi 3 Pasca Elektro, Institut Teknologi Sepuluh Nopember Surabaya,
DAFTAR ISI. HALAMAN JUDUL... i. HALAMAN PENGESAHAN... ii. HALAMAN PERNYATAAN... iii. KATA PENGANTAR... iv. MOTO DAN PERSEMBAHAN... v. DAFTAR ISI...
 DAFTAR ISI HALAMAN JUDUL... i HALAMAN PENGESAHAN... ii HALAMAN PERNYATAAN... iii KATA PENGANTAR... iv MOTO DAN PERSEMBAHAN... v DAFTAR ISI... vi DAFTAR GAMBAR... viii DAFTAR TABEL... x ABSTRAK... xi ABSTRACT...
DAFTAR ISI HALAMAN JUDUL... i HALAMAN PENGESAHAN... ii HALAMAN PERNYATAAN... iii KATA PENGANTAR... iv MOTO DAN PERSEMBAHAN... v DAFTAR ISI... vi DAFTAR GAMBAR... viii DAFTAR TABEL... x ABSTRAK... xi ABSTRACT...
IMPLEMENTASI NON PLAYER CHARACTER PADA GAME PERTARUNGAN GALAH ASIN MENGGUNAKAN LOGIKA FUZZY
 IMPLEMENTASI NON PLAYER CHARACTER PADA GAME PERTARUNGAN GALAH ASIN MENGGUNAKAN LOGIKA FUZZY Nomo Haga A.G 1, Yulison Herry C 2, Rezki Yuniarti 3 Jurusan Informatika, Fakultas MIPA, UniversitasJenderal
IMPLEMENTASI NON PLAYER CHARACTER PADA GAME PERTARUNGAN GALAH ASIN MENGGUNAKAN LOGIKA FUZZY Nomo Haga A.G 1, Yulison Herry C 2, Rezki Yuniarti 3 Jurusan Informatika, Fakultas MIPA, UniversitasJenderal
Desain Sistem Kontrol Functional Electrical Stimulation menggunakan Fuzzy orde 2
 Desain Sistem Kontrol Functional Electrical Stimulation menggunakan Fuzzy orde 2 Hendi Wicaksono Agung D 1,3, Achmad Arifin, Ph.D 2. (1) Program Pasca Sarjana Jurusan Teknik Elektro Bidang Studi Elektronika
Desain Sistem Kontrol Functional Electrical Stimulation menggunakan Fuzzy orde 2 Hendi Wicaksono Agung D 1,3, Achmad Arifin, Ph.D 2. (1) Program Pasca Sarjana Jurusan Teknik Elektro Bidang Studi Elektronika
Koordinasi Non Playing Character (NPC) Follower Menggunakan Algoritma Potential Fields
 Follower Menggunakan Algoritma Potential Fields") Koordinasi Non Playing Character (NPC) Follower Menggunakan Algoritma Potential Fields Latius Hermawan 1, Siti Asmiatun 2 1,2 Pascasarjana MTI Universitas Dian Nuswantoro, Semarang 50131 E-mail : fanytiuz@gmail.com,
Koordinasi Non Playing Character (NPC) Follower Menggunakan Algoritma Potential Fields Latius Hermawan 1, Siti Asmiatun 2 1,2 Pascasarjana MTI Universitas Dian Nuswantoro, Semarang 50131 E-mail : fanytiuz@gmail.com,
BAB I PENDAHULUAN. Namun dengan semakin berkembangnya zaman, penyakit semakin mudah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Kesehatan merupakan salah satu hal penting dalam kehidupan manusia. Namun dengan semakin berkembangnya zaman, penyakit semakin mudah menghampiri manusia. Semakin
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Kesehatan merupakan salah satu hal penting dalam kehidupan manusia. Namun dengan semakin berkembangnya zaman, penyakit semakin mudah menghampiri manusia. Semakin
Implementasi Pohon Keputusan untuk Menganalisa Desain Sistem Battle pada Game Brightsouls
 Implementasi Pohon Keputusan untuk Menganalisa Desain Sistem Battle pada Game Brightsouls Kevin Erdiza Yogatama, 135150161 Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika Institut
Implementasi Pohon Keputusan untuk Menganalisa Desain Sistem Battle pada Game Brightsouls Kevin Erdiza Yogatama, 135150161 Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika Institut
BAB I PENDAHULUAN 1.2. LATAR BELAKANG MASALAH
 BAB I PENDAHULUAN Pada bab pertama ini akan dibahas mengenai latar belakang mengapa perlu dibuat aplikasi Soil Taxonomy USDA berbasis Fuzzy Logic. Dijabarkan juga mengenai tujuan dan maksud dari pembuatan
BAB I PENDAHULUAN Pada bab pertama ini akan dibahas mengenai latar belakang mengapa perlu dibuat aplikasi Soil Taxonomy USDA berbasis Fuzzy Logic. Dijabarkan juga mengenai tujuan dan maksud dari pembuatan
BAB 1 PENDAHULUAN Latar Belakang
 BAB 1 PENDAHULUAN 1.1. Latar Belakang Kecepatan perkembangan software saat ini cukup pesat, tidak hanya dalam hal software aplikasi saja, tetapi juga didalam dunia game. Game dibuat untuk digunakan sebagai
BAB 1 PENDAHULUAN 1.1. Latar Belakang Kecepatan perkembangan software saat ini cukup pesat, tidak hanya dalam hal software aplikasi saja, tetapi juga didalam dunia game. Game dibuat untuk digunakan sebagai
SIMULASI AUTONOMOUS VEHICLE DI UNIVERSITAS KRISTEN SATYA WACANA SALATIGA
 SIMULASI AUTONOMOUS VEHICLE DI UNIVERSITAS KRISTEN SATYA WACANA SALATIGA Sandro Angkat, Darmawan Utomo, Hartanto K. Wardana SIMULASI AUTONOMOUS VEHICLE DI UNIVERSITAS KRISTEN SATYA WACANA SALATIGA Sandro
SIMULASI AUTONOMOUS VEHICLE DI UNIVERSITAS KRISTEN SATYA WACANA SALATIGA Sandro Angkat, Darmawan Utomo, Hartanto K. Wardana SIMULASI AUTONOMOUS VEHICLE DI UNIVERSITAS KRISTEN SATYA WACANA SALATIGA Sandro
MANUVER KELOMPOK NPC BERBASIS BOIDS
 TESIS-TE142599 MANUVER KELOMPOK NPC BERBASIS BOIDS Yonly Adrianus Benufinit 22122526 DOSEN PEMBIMBING Moch. Hariadi ST., M.Sc., Ph.D. Dr. Supeno Mardi SN, ST., MT. PROGRAM MAGISTER BIDANG KEAHLIAN JARINGAN
TESIS-TE142599 MANUVER KELOMPOK NPC BERBASIS BOIDS Yonly Adrianus Benufinit 22122526 DOSEN PEMBIMBING Moch. Hariadi ST., M.Sc., Ph.D. Dr. Supeno Mardi SN, ST., MT. PROGRAM MAGISTER BIDANG KEAHLIAN JARINGAN
PERENCANAAN JUMLAH PRODUK MENGGUNAKAN METODE FUZZY MAMDANI BERDASARKAN PREDIKSI PERMINTAAN Oleh: Norma Endah Haryati ( )
") TUGAS AKHIR PERENCANAAN JUMLAH PRODUK MENGGUNAKAN METODE FUZZY MAMDANI BERDASARKAN PREDIKSI PERMINTAAN Oleh: Norma Endah Haryati (1207 100 031) Dosen Pembimbing: Drs. I G Ngurah Rai Usadha, M.Si Dra. Nuri
TUGAS AKHIR PERENCANAAN JUMLAH PRODUK MENGGUNAKAN METODE FUZZY MAMDANI BERDASARKAN PREDIKSI PERMINTAAN Oleh: Norma Endah Haryati (1207 100 031) Dosen Pembimbing: Drs. I G Ngurah Rai Usadha, M.Si Dra. Nuri
UKDW BAB I PENDAHULUAN. 1.1 Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah NPC (Non-Player-Character) pada aplikasi permainan video merupakan pemain yang tidak dikendalikan oleh manusia. Dalam permainan video, NPC diprogram untuk melakukan
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah NPC (Non-Player-Character) pada aplikasi permainan video merupakan pemain yang tidak dikendalikan oleh manusia. Dalam permainan video, NPC diprogram untuk melakukan
DESAIN KONTROLER FUZZY UNTUK SISTEM GANTRY CRANE
 DESAIN KONTROLER FUZZY UNTUK SISTEM GANTRY CRANE Rosita Melindawati (2211106002) Pembimbing : Dr. Trihastuti Agustinah, ST., MT. Bidang Studi Teknik Sistem Pengaturan JURUSAN TEKNIK ELEKTRO Fakultas Teknologi
DESAIN KONTROLER FUZZY UNTUK SISTEM GANTRY CRANE Rosita Melindawati (2211106002) Pembimbing : Dr. Trihastuti Agustinah, ST., MT. Bidang Studi Teknik Sistem Pengaturan JURUSAN TEKNIK ELEKTRO Fakultas Teknologi
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan dan aplikasi Image Processing telah memimpin dunia teknologi di beberapa bidang seperti komunikasi digital dan internet, penyiaran, alat kedokteran, sistem
BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan dan aplikasi Image Processing telah memimpin dunia teknologi di beberapa bidang seperti komunikasi digital dan internet, penyiaran, alat kedokteran, sistem
SISTEM KONTROL GERAK SEDERHANA PADA ROBOT PENGHINDAR HALANGAN BERBASIS KAMERA DAN PENGOLAHAN CITRA
 SISTEM KONTROL GERAK SEDERHANA PADA ROBOT PENGHINDAR HALANGAN BERBASIS KAMERA DAN PENGOLAHAN CITRA Dirvi Eko Juliando Sudirman 1) 1) Teknik Komputer Kontrol Politeknik Negeri Madiun Jl Serayu No. 84, Madiun,
SISTEM KONTROL GERAK SEDERHANA PADA ROBOT PENGHINDAR HALANGAN BERBASIS KAMERA DAN PENGOLAHAN CITRA Dirvi Eko Juliando Sudirman 1) 1) Teknik Komputer Kontrol Politeknik Negeri Madiun Jl Serayu No. 84, Madiun,
BAB III PERANCANGAN. Gambar 3.1. Sistem instruksi dan kontrol robot.
 BAB III PERANCANGAN Membahas perancangan sistem yang terdiri dari gambaran umum sistem dan bagaimana mengolah informasi yang didapat dari penglihatan dan arah hadap robot di dalam algoritma penentuan lokasi
BAB III PERANCANGAN Membahas perancangan sistem yang terdiri dari gambaran umum sistem dan bagaimana mengolah informasi yang didapat dari penglihatan dan arah hadap robot di dalam algoritma penentuan lokasi
MODUL 8 APLIKASI NEURAL NETWORK DAN FUZZY LOGIC PADA PERKIRAAN CUACA
 MODUL 8 APLIKASI NEURAL NETWORK DAN FUZZY LOGIC PADA PERKIRAAN CUACA Muhammad Ilham 10211078 Program Studi Fisika, Institut Teknologi Bandung, Indonesia Email: muhammad_ilham@students.itb.ac.id Asisten:
MODUL 8 APLIKASI NEURAL NETWORK DAN FUZZY LOGIC PADA PERKIRAAN CUACA Muhammad Ilham 10211078 Program Studi Fisika, Institut Teknologi Bandung, Indonesia Email: muhammad_ilham@students.itb.ac.id Asisten:
Institut Teknologi Sepuluh Nopember Surabaya
 Aplikasi Sistem Inferensi Fuzzy Metode Sugeno dalam Memperkirakan Produksi Air Mineral dalam Kemasan Oleh Suwandi NRP 1209201724 Dosen Pembimbing 1. Prof. Dr M. Isa Irawan, MT 2. Dr Imam Mukhlash, MT Institut
Aplikasi Sistem Inferensi Fuzzy Metode Sugeno dalam Memperkirakan Produksi Air Mineral dalam Kemasan Oleh Suwandi NRP 1209201724 Dosen Pembimbing 1. Prof. Dr M. Isa Irawan, MT 2. Dr Imam Mukhlash, MT Institut
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas perancangan serta penerapan pengendalian berbasis logika fuzzy pada sistem Fuzzy Logic Sebagai Kendali Pendingin Ruangan Menggunakan MATLAB. Dan simulasi
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas perancangan serta penerapan pengendalian berbasis logika fuzzy pada sistem Fuzzy Logic Sebagai Kendali Pendingin Ruangan Menggunakan MATLAB. Dan simulasi
Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe 1 Untuk Sistem Pendulum Kereta
 Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe Untuk Sistem Pendulum Kereta Helvin Indrawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe Untuk Sistem Pendulum Kereta Helvin Indrawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
Fitur bentuk merupakan fitur dasar dalam visual content
 7407030059 1 KLASIFIKASI CIRI BENTUK MENGGUNAKAN METODE FUZZY INFERENCE SYSTEM Mala Alfiyah Ningsih; Setiawardhana, S.T; Nana Ramadijanti, S.Kom,M.Kom Abstract Fitur bentuk merupakan fitur dasar dimana
7407030059 1 KLASIFIKASI CIRI BENTUK MENGGUNAKAN METODE FUZZY INFERENCE SYSTEM Mala Alfiyah Ningsih; Setiawardhana, S.T; Nana Ramadijanti, S.Kom,M.Kom Abstract Fitur bentuk merupakan fitur dasar dimana
Teknik Sistem Pengaturan Teknik Elektro - Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
 Teknik Sistem Pengaturan Teknik Elektro - Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Perancangan Kontroler Fuzzy PD untuk Kontrol Toleransi Kesalahan Sensor Oleh Moch Hafid [2211 106
Teknik Sistem Pengaturan Teknik Elektro - Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Perancangan Kontroler Fuzzy PD untuk Kontrol Toleransi Kesalahan Sensor Oleh Moch Hafid [2211 106
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1. Analisis Sistem Analisis sistem adalah teknik pemecahan masalah yang menguraikan bagian-bagian komponen dengan mempelajari seberapa bagus bagian-bagian komponen tersebut
BAB III ANALISA DAN PERANCANGAN III.1. Analisis Sistem Analisis sistem adalah teknik pemecahan masalah yang menguraikan bagian-bagian komponen dengan mempelajari seberapa bagus bagian-bagian komponen tersebut
SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8
 SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8 I Nyoman Benny Rismawan 1, Cok Gede Indra Partha 2, Yoga Divayana 3 Jurusan Teknik Elektro, Fakultas Teknik Universitas
SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8 I Nyoman Benny Rismawan 1, Cok Gede Indra Partha 2, Yoga Divayana 3 Jurusan Teknik Elektro, Fakultas Teknik Universitas
BAB I PENDAHULUAN. Microsoft untuk menjadi sebuah alat pengendali pada konsol game, Microsoft
 BAB I PENDAHULUAN 1.1 LATAR BELAKANG Bill Gates, salah satu pemilik dan pendiri perusahaan raksasa didunia, Microsoft, menjawab tantangan dan impiannya bahwa sebuah mesin permainan dimana kita bisa mengambil
BAB I PENDAHULUAN 1.1 LATAR BELAKANG Bill Gates, salah satu pemilik dan pendiri perusahaan raksasa didunia, Microsoft, menjawab tantangan dan impiannya bahwa sebuah mesin permainan dimana kita bisa mengambil
BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM
 BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM III.1. Analisis Aplikasi macromedia flash 8 mempunyai fungsi utama untuk membuat sebuah animasi atau game dengan menggunakan bahasa pemrograman yang masih
BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM III.1. Analisis Aplikasi macromedia flash 8 mempunyai fungsi utama untuk membuat sebuah animasi atau game dengan menggunakan bahasa pemrograman yang masih
KENDALI LOGIKA FUZZY PADA PENGATURAN LAMPU LALU LINTAS BERDASARKAN URGENCY DAN STOP DEGREE
 KENDALI LOGIKA FUZZY PADA PENGATURAN LAMPU LALU LINTAS BERDASARKAN URGENCY DAN STOP DEGREE Fitria Suryatini Program Studi Teknik Elektro Fakultas Teknik Universitas Islam 45 (UNISMA) E-mail: fitriasuryatini88@gmail.com
KENDALI LOGIKA FUZZY PADA PENGATURAN LAMPU LALU LINTAS BERDASARKAN URGENCY DAN STOP DEGREE Fitria Suryatini Program Studi Teknik Elektro Fakultas Teknik Universitas Islam 45 (UNISMA) E-mail: fitriasuryatini88@gmail.com
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Objek tiga dimensi merupakan salah satu komponen multimedia yang memegang peranan sangat penting sebagai bentuk informasi visual. Objek tiga dimensi dibentuk oleh sekumpulan
BAB I PENDAHULUAN 1.1 Latar Belakang Objek tiga dimensi merupakan salah satu komponen multimedia yang memegang peranan sangat penting sebagai bentuk informasi visual. Objek tiga dimensi dibentuk oleh sekumpulan
Penerapan Metode Fuzzy Mamdani Pada Rem Otomatis Mobil Cerdas
 Penerapan Metode Fuzzy Mamdani Pada Rem Otomatis Mobil Cerdas Zulfikar Sembiring Jurusan Teknik Informatika, Fakultas Teknik, Universitas Medan Area zoelsembiring@gmail.com Abstrak Logika Fuzzy telah banyak
Penerapan Metode Fuzzy Mamdani Pada Rem Otomatis Mobil Cerdas Zulfikar Sembiring Jurusan Teknik Informatika, Fakultas Teknik, Universitas Medan Area zoelsembiring@gmail.com Abstrak Logika Fuzzy telah banyak
BAB III METODE PENELITIAN. pegawai negeri pada instansi pemerintahan, seperti digambarkan sebagai
 30 BAB III METODE PENELITIAN Tugas akhir ini berupa proyek (pengembangan), di mana sistem yang ada dapat memberikan suatu penyelesaian dari permasalahan mengenai analisa tingkat resiko yang akan dihadapi
30 BAB III METODE PENELITIAN Tugas akhir ini berupa proyek (pengembangan), di mana sistem yang ada dapat memberikan suatu penyelesaian dari permasalahan mengenai analisa tingkat resiko yang akan dihadapi
Aminudin NRP Dosen Pembimbing Dr. Ronny Mardiyanto, ST., MT. Dr.Ir. Djoko Purwanto, M. Eng.
 Aminudin NRP 2209100050 Dosen Pembimbing Dr. Ronny Mardiyanto, ST., MT. Dr.Ir. Djoko Purwanto, M. Eng. Bidang Studi Elektronika JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh
Aminudin NRP 2209100050 Dosen Pembimbing Dr. Ronny Mardiyanto, ST., MT. Dr.Ir. Djoko Purwanto, M. Eng. Bidang Studi Elektronika JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh
OPTIMASI ALGORITMA IDENTIFIKASI STRABISMUS
 OPTIMASI ALGORITMA IDENTIFIKASI STRABISMUS PADA MATA MANUSIA BERBASIS IMAGE PROCESSING DENGAN EUCLIDEAN DISTANCE PADA SISTEM MEKANIKAL AUTOMATED OPTICAL INSPECTION (AOI) AHMAD RIFA I RIF AN NRP. 2106 100
OPTIMASI ALGORITMA IDENTIFIKASI STRABISMUS PADA MATA MANUSIA BERBASIS IMAGE PROCESSING DENGAN EUCLIDEAN DISTANCE PADA SISTEM MEKANIKAL AUTOMATED OPTICAL INSPECTION (AOI) AHMAD RIFA I RIF AN NRP. 2106 100
BAB 2 TINJAUAN PUSTAKA
 BAB 2 TINJAUAN PUSTAKA Menurut Silva, dkk(2003) ketika mendesain sebuah sistem AR, ada tiga aspek yang harus ada, yaitu kombinasi dari dunia nyata dan dunia virtual, interaksi secara real-time, dan registrasi
BAB 2 TINJAUAN PUSTAKA Menurut Silva, dkk(2003) ketika mendesain sebuah sistem AR, ada tiga aspek yang harus ada, yaitu kombinasi dari dunia nyata dan dunia virtual, interaksi secara real-time, dan registrasi
Penggunaan Sensor Kesetimbangan Accelerometer dan Sensor Halangan Ultrasonic pada Aplikasi Robot Berkaki Dua
 Volume 1 Nomor 2, April 217 e-issn : 2541-219 p-issn : 2541-44X Penggunaan Sensor Kesetimbangan Accelerometer dan Sensor Halangan Ultrasonic pada Aplikasi Robot Berkaki Dua Abdullah Sekolah Tinggi Teknik
Volume 1 Nomor 2, April 217 e-issn : 2541-219 p-issn : 2541-44X Penggunaan Sensor Kesetimbangan Accelerometer dan Sensor Halangan Ultrasonic pada Aplikasi Robot Berkaki Dua Abdullah Sekolah Tinggi Teknik
IDENTIFIKASI KERUSAKAN MESIN BERPUTAR BERDASARKAN SINYAL SUARA DENGAN METODE ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
 IDENTIFIKASI KERUSAKAN MESIN BERPUTAR BERDASARKAN SINYAL SUARA DENGAN METODE ADAPTIVE NEURO FUZZY INFERENCE SYSTEM Seminar Tugas Akhir O L E H : M I F T A H U D D I N P E M B I M B I N G : I R. Y E R R
IDENTIFIKASI KERUSAKAN MESIN BERPUTAR BERDASARKAN SINYAL SUARA DENGAN METODE ADAPTIVE NEURO FUZZY INFERENCE SYSTEM Seminar Tugas Akhir O L E H : M I F T A H U D D I N P E M B I M B I N G : I R. Y E R R
Praktikum Sistem Pakar Jumat 16 Desember 2013 Pertemuan 12. Tabel 1. Rancangan Variabel fuzzy Fungsi Nama Variabel Rentang Nilai Keterangan
 Praktikum Sistem Pakar Jumat 16 Desember 2013 Pertemuan 12 Studi Kasus : Studi Permasalahan: Suatu Perusahaan akan melakukan perkiraan terhadap produksi suatu barang tiap bulan. Untuk menentukan jumlah
Praktikum Sistem Pakar Jumat 16 Desember 2013 Pertemuan 12 Studi Kasus : Studi Permasalahan: Suatu Perusahaan akan melakukan perkiraan terhadap produksi suatu barang tiap bulan. Untuk menentukan jumlah
Kontrol Keseimbangan Robot Mobil Beroda Dua Dengan. Metode Logika Fuzzy
 SKRIPSI Kontrol Keseimbangan Robot Mobil Beroda Dua Dengan Metode Logika Fuzzy Laporan ini disusun guna memenuhi salah satu persyaratan untuk menyelesaikan program S-1 Teknik Elektro Fakultas Teknik Universitas
SKRIPSI Kontrol Keseimbangan Robot Mobil Beroda Dua Dengan Metode Logika Fuzzy Laporan ini disusun guna memenuhi salah satu persyaratan untuk menyelesaikan program S-1 Teknik Elektro Fakultas Teknik Universitas
GAME ANDROID NEKERAN MENGGUNAKAN METODE FUZZY LOGIC SKRIPSI. Diajukan Untuk Memenuhi Sabagian Syarat Guna. Memperoleh Gelar Sarjana Komputer (S.Kom.
 GAME ANDROID NEKERAN MENGGUNAKAN METODE FUZZY LOGIC SKRIPSI Diajukan Untuk Memenuhi Sabagian Syarat Guna Memperoleh Gelar Sarjana Komputer (S.Kom.) Pada Program Studi Teknik Informatika UN PGRI Kediri
GAME ANDROID NEKERAN MENGGUNAKAN METODE FUZZY LOGIC SKRIPSI Diajukan Untuk Memenuhi Sabagian Syarat Guna Memperoleh Gelar Sarjana Komputer (S.Kom.) Pada Program Studi Teknik Informatika UN PGRI Kediri
PERANCANGAN SISTEM PENDETEKSI ALAT PELINDUNG DIRI MENGGUNAKAN TEKNOLOGI IMAGE PROCESSING
 PERANCANGAN SISTEM PENDETEKSI ALAT PELINDUNG DIRI MENGGUNAKAN TEKNOLOGI IMAGE PROCESSING 1 Rucitra Danny Anindita dan Arief Rahman Jurusan Teknik Industri Institut Teknologi Sepuluh Nopember (ITS) Surabaya
PERANCANGAN SISTEM PENDETEKSI ALAT PELINDUNG DIRI MENGGUNAKAN TEKNOLOGI IMAGE PROCESSING 1 Rucitra Danny Anindita dan Arief Rahman Jurusan Teknik Industri Institut Teknologi Sepuluh Nopember (ITS) Surabaya
Penerapan Teori Graf dalam Game Bertipe Real Time Strategy (RTS)
") Penerapan Teori Graf dalam Game Bertipe Real Time Strategy (RTS) Yudha Okky Pratama/13509005 Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung, Jl. Ganesha
Penerapan Teori Graf dalam Game Bertipe Real Time Strategy (RTS) Yudha Okky Pratama/13509005 Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung, Jl. Ganesha
IMPLEMENTASI AUTOMATED PATH DAN ROUTE FINDING UNTUK UNIT BEHAVIOR PADA REAL-TIME STRATEGY GAME DENGAN MENGGUNAKAN FUZZY LOGIC
 IMPLEMENTASI AUTOMATED PATH DAN ROUTE FINDING UNTUK UNIT BEHAVIOR PADA REAL-TIME STRATEGY GAME DENGAN MENGGUNAKAN FUZZY LOGIC Wijanarko Sukma Pamungkas, Ir. Suhadi Lili Jurusan Teknik Informatika, Fakultas
IMPLEMENTASI AUTOMATED PATH DAN ROUTE FINDING UNTUK UNIT BEHAVIOR PADA REAL-TIME STRATEGY GAME DENGAN MENGGUNAKAN FUZZY LOGIC Wijanarko Sukma Pamungkas, Ir. Suhadi Lili Jurusan Teknik Informatika, Fakultas