EKO TRI WASISTO Dosen Pembimbing 1 Dosen Pembimbing 2
|
|
|
- Glenna Atmadja
- 8 tahun lalu
- Tontonan:
Transkripsi


1 RANCANG BANGUN SISTEM KONTROL ATTITUDE PADA UAV (UNMANNED AERIAL VEHICLE) QUADROTOR DF- UAV01 DENGAN MENGGUNAKAN SENSOR ACCELEROMETER 3-AXIS DENGAN METODE FUZZY LOGIC EKO TRI WASISTO Dosen Pembimbing 1 Dosen Pembimbing 2 Fitri Adi Iskandarianto, ST.MT Ir. Matraji, M.Sc NIPN NIPN JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2011
2 LATAR BELAKANG UAV (Unmanned Aerial Vehicle) atau kendaraan udara tanpa awak adalah salah satu teknologi yang sedang mengalami perkembangan yang pesat dan memiliki potensi yang sangat besar, baik untuk keperluan militer maupun sipil. Contoh aplikasinya adalah untuk survey, pemetaan wilayah, patroli, deteksi tambang mineral, riset, penyerang bersenjata contohnya Predator RQ-1 dan lain-lain. Ada banyak tipe UAV yang dikenal. Contohnya adalah fixed wing, axial wing, coaxial wing, dan quadrotor. Quadrotor adalah helikopter yang tersusun atas empat buah rotor yang diletakkan simetris pada tepi-tepi ujungnya. Untuk menjalankan quadrotor, ada berbagai sistem yang harus dikendalikan pada quadrotor diantaranya adalah sistem attitude (sikap). Sistem attitude ini berguna untuk stabilitas penyearah baik waktu quadrotor terbang maupun pada waktu diam di udara. Sistem attitude ini berhubungan dengan sensor yang digunakan pada quadrotor ini yaitu sensor accelerometer. Di samping itu juga, keluaran yang dihasilkan pada sistem attitude ini akan dipakai sebagai masukan pada 5 buah rotor.
3 PERMASALAHAN Permasalahan yang diangkat untuk penyelesaian tugas akhir ini adalah bagaimana merancang bangun dan mengendalikan sistem control attitude (sikap) pada UAV Quadrotor dengan menggunakan metode fuzzy logic.
4 BATASAN MASALAH Untuk memfokuskan permasalahan yang diangkat dalam tugas akhir ini, beberapa batasan masalah yang diambil antaranya adalah sebagai berikut : 1. Tugas akhir ini hanya memfokuskan pengendalian pada sensor UAV yaitu accelerometer yang berfungsi sebagai control attitude. 2. Attitude (sikap) yang dianalisis adalah gerak maju-mundur dan gerak mengoleng ke kiri-kanan pada UAV Quadrotor. 3. Kondisi Hardware (quadrotor) digantungkan untuk mengkondisikan seolah-olah pada kondisi terbang.
5 TUJUAN dan MANFAAT Tujuan dan manfaat dari pengerjaan tugas akhir ini adalah untuk mengontrol attitude (sikap) pada UAV Quadrotor untuk stabilitas penyearah dengan menggunakan fuzzy logic.
6 Tinjauan Pustaka Ruslan Gani, Wahyudi, S.T, M.T, Iwan Setiawan, S.T, M.T Perancangan Sensor Gyroscope dan Accelerometer Untuk Menentukan Sudut dan Jarak Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro. Netika Purwaningrum.2007, APLIKASI FUZZY LOGIC UNTUK PENGENDALI PENERANGAN RUANGAN BERBASIS MIKROKONTROLER ATMEGA8535, JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI SEMARANG.
7 METODOLOGI PERCOBAAN MULAI STUDI LITERATUR PRA - EKSPERIMEN EKSPERIMEN PENGINTEGRASIAN HARDWARE DAN SOFTWARE PENGUJIAN ANALISA DAN PENULISAN LAPORAN TUGAS AKHIR SELESAI
8 METODOLOGI PERCOBAAN Berikut adalah rincian metodologi penelitian yang akan dilaksanakan pada tugas akhir kali ini: 1. Studi literatur terhadap materi yang terkait dengan pelaksanaan tugas akhir yang akan dilakukan, mengenai: Pemahaman mengenai Quadrotor Pemahaman mengenai sensor accelerometer Pemahaman mengenai system kontrol fuzzy logic untuk mengontrol attitude dari quadrotor. 2. Pra-eksperimen Pembuatan UAV quadrotor, desain untuk UAV quadrotor pada Tugas Akhir ini adalah sebagai berikut, Merancang system kendali untuk sensor attitude dengan fuzzy logic. Penentuan kinerja dan penentuan range (set point) dari sensor accelerometer untuk mengontrol attitude (sikap) dari quadrotor. Pembuatan simulasi
9 METODOLOGI PERCOBAAN 3. Eksperimen Pengujian terhadap sensor yang digunakan pada UAV quadrotor, accelerometer terhadap berbagai posisi, miring ke kanan dan miring ke kiri, condong ke depan dan ke belakang, maju dan mundur sehingga nanti di dapatkan suatu range dari ke tiga sumbu, X,Y dan Z untuk dijadikan sebagai masukkan pada tahap selanjutnya. Pengujian dengan menggunakan pengendalian bertingkat berbasis logic solver dengan mensingkronkan software dan hardware. Dalam proses koneksi hardware dan software ini menggunakan perangkat mikrokontroler dan software Visual Basic atau dengan menggunakan Lab. View. Pemvalidasian data 4. Analisis. 5. Penyusunan laporan Tugas Akhir.

10 Perancangan Perangkat Keras (Hardware) Pembuatan rangka badan UAV quadrotor Bentuk rangka quadrotor yang dibuat untuk tugas akhir ini dapat dilihat pada gambar berikut,

11 Sensor Accelerometer 3-axis MMA-7260Q Perancangan perangkat keras pada Tugas Akhir ini meliputi perancangan sistem minimum mikrokontroler ATmega16 dan perancangan sensor accelerometer MMA-7260Q. Secara umum perancangan perangkat keras dapat dilihat pada gambar berikut. Komputer USART PORT0 Mikrokontroler ATMEGA 8535 PORT1 (controller) Accelerometer X, Y, Z Gambar sensor accelerometer 3-axis PORT 2 Gambar Diagram blok perancangan attitude pada quadrotor pendeteksi dengan menggunakan sensor accelerometer.

12 Gambar Rangkaian
13 Tiap-tiap bagian dari diagram blok system pada gambar dapat dijelaskan sebagai berikut : 1. Sensor accelerometer MMA 7260 digunakan untuk memperoleh besaran percepatan dari ketiga poros putar, X, Y, dan Z. 2. Mikrokontroler ATmega 16 digunakan menerima data dari sensor, mengubahnya menjadi data digital, memfilter data secara digital dan melakukan komunikasi serial dengan komputer. 3. Komputer digunakan untuk mengolah data digital percepatan menjadi besaran jarak, kecepatan dan sudut dan menampilkan kedalam suatu HMI.
 Perancangan")

14 Perancangan Perangkat Lunak (Software) Perancangan simulasi control attitude dengan menggunakan software Visual Basic.
15 Perancangan system control attitude dengan fuzzy logic control MULAI PEMBANGKITAN DATA MASUKAN dan KELUARAN FUZZIFIKASI MEMBUAT RULE BASE CONTROL ATTITUDE INTERFERENSI FUZZY DEFUZZIFIKASI HASIL KELUARAN SELESAI
16 Proses Fuzzifikasi Sistem Pengendalian logika fuzzy menggunakan masukan berupa nilai keluaran langsung sumbu X, Y, dan Z dari sensor accelerometer. Dengan menggunakan sensor accelerometer ini dapat diketahui nilai perubahan pada ke tiga sumbu X,Y,dan Z pada posisi yang telah ditentukan. Keluaran dari sistem kendali logika fuzzy adalah suatu nilai yang nantinya akan digunakan sebagai masukan untuk ke lima motor pada quadrotor.

17 Fuzzy Masukan KLF yang digunakan adalah metode inferensi Sugeno karena menghasilkan keluaran surface yang lebih halus dibandingkan metode inferensi Mamdani. Gambar Fuzzy Interferensi Sistem
18 Membership function dari X Fungsi keanggotaan untuk masukan X (range 91,150) adalah menggunakan segitiga karena bentuk segitiga sangat sederhana dan mudah digunakan untuk masukan yang tidak simetris dengan Xa = Maju Mundur Pelan, Xb= Maju Mundur Cepat, Xc = Miring Kiri Diam, Xd= Miring Kiri Gerak, Xe= Miring Kanan Diam, Xf= Miring Kanan Gerak, Xg= Mangguk depan belakang.

19 Membership function dari X
20 Membership function dari Y Fungsi keanggotaan untuk masukan Y (range 80,140) adalah menggunakan segitiga karena bentuk segitiga sangat sederhana dan mudah digunakan untuk masukan yang tidak simetris dengan YK1 = Maju Mundur Pelan, YK2= Maju Mundur Cepat, YK3 = Miring Kiri Diam, YK4= Miring Kiri Gerak, YK5= Miring Kanan Diam, YK7= Miring Kanan Gerak, Xg= Mangguk Depan Belakang.
21 Membership function dari Y
22 Membership function dari Z Fungsi keanggotaan untuk masukan Z (range 100,160) adalah menggunakan segitiga karena bentuk segitiga sangat sederhana dan mudah digunakan untuk masukan yang tidak simetris dengan Z6, Z7, Z8, Z9, Z10, Z11, Z12.
23 Membership function dari Z
24 Membership Function keluaran dari fuzzy logic yang dirancang, MM= Maju Mundur MK= Miring Kiri Diam MKa= Miring Kanan Diam MKG= Miring Kiri Gerak MKaG= Miring Kanan Gerak MDB = Mangguk Depan Belakang, MBDc= Mangguk Depan Belakang Cepat.
25
26 Basis Aturan ( Rule Base ) KLF memiliki basis pengetahuan yang terdiri dari basis data dan basis aturan. Basis data meliputi parameter fuzzy itu sendiri, antara lain fungsi keanggotaan, dan semesta pembicaraan himpunan fuzzy. Sedangkan basis aturan (rule base) meliputi kumpulan aturan pengendali logika fuzzy untuk menyatakan aksi pengendali agar mencapai tujuan yang diharapkan. Penyusunan basis aturan berdasarkan pengamatan pada sensor terhadap posisi yang telah kita tentukan. Pengaruh perubahan ketiga nilai dari sensor accelerometer ini yaitu nantinya akan mempengaruhi attitude pada quadrotor DF-01.
27 Terdapat beberapa Prinsip dasar dalam perancangan basis aturan kontroler logika fuzzy dapat digeneralisasikan sebagai berikut : jika variabel proses (nilai X, Y, dan Z) telah mencapai nilai yang diinginkan, maka aturan yang dibuat dapat tercapai, sehingga nanti akan mengeluarkan suatu nilai untuk dijadikan setpoint untuk ke-5 motor. Dan dari hasil setpoint inilah, attitude dari quadrotor dapat dikendalikan.
28 Melalui sejumlah aturan dasar konsep generalisasi di atas serta beberapa kali melakukan percobaan mengenai pengaruh perubahan nilai X, Y, dan Z pada saat manuvering atau pun diam maka diperoleh basis aturan pengendali logika fuzzy. Algoritma fuzzy meliputi aturan seperti ditabelkan pada Tabel 3.1 dan dapat direpresentasikan dalam aturan berikut : 1. If (X is Xa) and (Y is YK1) and (Z is Z6) then (1 is MM) (1) 2. If (X is Xb) and (Y is YK2) and (Z is Z7) then (1 is MK) (1) 3. If (X is Xc) and (Y is YK3) and (Z is Z8) then (1 is MKG) (1) 4. If (X is Xd) and (Y is YK4) and (Z is Z9) then (1 is MKa) (1) 5. If (X is Xe) and (Y is YK5) and (Z is Z10) then (1 is MKaG) (1) 6. If (X is Xf) and (Y is YK6) and (Z is Z11) then (1 is MDB) (1) 7. If (X is Xg) and (Y is YK7) and (Z is Z12) then (1 is MDBc) (1)

29
30 MULAI SENSOR ACCELEROMETER MEMBACA NILAI PERCEPATAN PADA SUMBU X PENENTUAN RANGE NILAI SENSOR PADA SETIAP POSISI QUADROTOR Flow chart sistem control PENENTUAN NILAI SET POINT UNTUK KELIMA MOTOR PADA SETIAP POSISI MENGIRIM DATA KE LAPTOP RANGE NILAI=SET POINT N Y POSISI QUADROTOR 1. MIRING KANAN 2. MIRING KIRI 3.MAJU MUNDUR 4.MENGANGGUK KEDEPAN DAN BELAKANG SELESAI
31 Set point yang dirancang Gerak maju mundur 1. Motor 1 = 4100 rpm 3. Motor 1 = 3800 rpm Motor 2 = 4100 rpm Motor 2 = 3800 rpm Motor 3 = 4100 rpm Motor 3 = 3800 rpm Motor 4 = 4100 rpm Motor 4 = 3800 rpm Motor 5 = 4500 rpm Motor 5 = 4600 rpm 2. Motor 1 = 3950 rpm Motor 2 = 3950 rpm Motor 3 = 3950 rpm Motor 4 = 3950 rpm Motor 5 = 4200 rpm
32 Gerak miring ke kiri 1. Motor 1 = 3800 rpm 3. Motor 1 = 4000 rpm Motor 2 = 3800 rpm Motor 2 = 4000 rpm Motor 3 = 3400 rpm Motor 3 = 3000 rpm Motor 4 = 3400 rpm Motor 4 = 3000 rpm Motor 5 = 4500 rpm Motor 5 = 4400 rpm 2. Motor 1 = 3800 rpm Motor 2 = 3800 rpm Motor 3 = 2500 rpm Motor 4 = 2500 rpm Motor 5 = 4200 rpm
33 Gerak miring ke kanan 1. Motor 1 = 3100 rpm 3. Motor 1 = 3300 rpm Motor 2 = 3100 rpm Motor 2 = 3300 rpm Motor 3 = 3900 rpm Motor 3 = 4100 rpm Motor 4 = 3900 rpm Motor 4 = 4100 rpm Motor 5 = 3800 rpm Motor 5 = 3500 rpm 2. Motor 1 = 3100 rpm Motor 2 = 3100 rpm Motor 3 = 4000 rpm Motor 4 = 4000 rpm Motor 5 = 4200 rpm
34 Gerak mengangguk ke depan 1. Motor 1 = 3900 rpm 3. Motor 1 = 3700 rpm Motor 2 = 2500 rpm Motor 2 = 3000 rpm Motor 3 = 3900 rpm Motor 3 = 3700 rpm Motor 4 = 2500 rpm Motor 4 = 3000 rpm Motor 5 = 4900 rpm Motor 5 = 3800 rpm 2. Motor 1 = 4000 rpm Motor 2 = 2200 rpm Motor 3 = 4000 rpm Motor 4 = 2200 rpm Motor 5 = 4000 rpm
35 Gerak mengangguk ke belakang 1. Motor 1 = 3200 rpm 3. Motor 1 = 3300 rpm Motor 2 = 4000 rpm Motor 2 = 4100 rpm Motor 3 = 3200 rpm Motor 3 = 3300 rpm Motor 4 = 4000 rpm Motor 4 = 4100 rpm Motor 5 = 4200 rpm Motor 5 = 4400 rpm 2. Motor 1 = 3000 rpm Motor 2 = 3900 rpm Motor 3 = 3000 rpm Motor 4 = 3900 rpm Motor 5 = 4000 rpm
36
37 Analisa dan Pembahasan Data Tegangan Offset pada Sensor Accelerometer MMA-7260 No Voffset sumbu X Voffset sumbu Y Voffset sumbu Z Rata-rata
38 Penentuan range dari sensor accelerometer MMA-7260 untuk kontrol attitude Respon Sensor Accelerometer Pada Saat Posisi Quadrotor Maju Mundur X Y percepatan (g) waktu (t second) percepatan (g) waktu (t second) Y percepatan (g) Z waktu (t second) Z
39 Respon Sensor Accelerometer Pada Saat Posisi Quadrotor Miring ke kiri percepatan (g) X waktu (t second) X percepatan (g) Y waktu (t second) Y Z percepatan (g) Z waktu (t second)
40 Respon Sensor Accelerometer Pada Saat Posisi Quadrotor Miring ke kanan. percepatan (g) X X percepatan (g) Y Y waktu(t second) waktu (t second) Z percepatan (g) Z waktu (t second)
41 Respon Sensor Accelerometer Pada Saat Posisi Quadrotor Manggguk ke depan ke belakang. percepatan (g) X X percepatan (g) Y Y waktu (t second) percepatan (g) Z waktu (t second) Z waktu (t second)
42 percepatan (g) percepatan Perbandingan keluaran sensor accelerometer untuk posisi yang di ujikan Maju mundur Mengangguk depan Chart Title waktu (t second) Kiri Kanan Chart Title X Y Z X Y Z percepatan(g) percepatan (g) belakang Chart Title waktu (t second) Chart Title waktu (t second) X Y Z X Y Z
43 PENGUJIAN Perhitungan Thrust (Daya Angkat) Untuk perhitungan daya angkat, maka diambil sikap (attitude) dari quadrotor pada saat gerakan dia miring kanan, kiri dan mangguk depan belakang. Tujuan dilakukan perhitungan daya angkat ini yaitu untuk mengetahui berapa besar daya yang dibutuhkan oleh motor yang posisinya miring untuk dapat kembali lagi seimbang. Sehingga,
44 Pada saat quadrotor miring ke kiri dengan set point yang diperoleh dari fuzzy dengan sudut kemiringan 30 derajat, density udara yang digunakan yaitu pada suhu 30 derajat, density standart dari udara adalah kg/m3 Motor 1= 2500 rpm Motor 2= 2500 rpm Motor 3= 3800 rpm Motor 4 = 3800 rpm Motor Kec. Rpm Kec. m/s Thrust (watt) Motor rpm 7.85 m/s Motor rpm 7.85 m/s Motor rpm m/s Motor rpm m/s 119.8
45 Pada saat quadrotor miring ke kanan dengan set point yang diperoleh dari fuzzy dengan sudut kemiringan 30 derajat, density udara yang digunakan yaitu pada suhu 30 derajat, density standart dari udara adalah kg/m3 Motor 1= 3900 rpm Motor 2= 3900 rpm Motor 3= 3100 rpm Motor 4 = 3100 rpm Motor Kec. Rpm Kec. m/s Thrust (watt) Motor rpm 12.2m/s Motor rpm 12.2m/s Motor3 3100rpm 9.7 m/s Motor4 3100rpm 9.7 m/s 64.77
46 Pada saat quadrotor mengangguk ke depan dan belakang dengan set point yang diperoleh dari fuzzy dengan sudut kemiringan 30 derajat, density standart dari udara yang digunakan adalah pada suhu normal 30 C adalah kg/m3 Motor 1= 4000 rpm Motor 2= 2200 rpm Motor 3= 2200 rpm Motor 4 = 4000 rpm Motor Kec. rpm Kec. m/s Thrust (watt) Motor rpm m/s Motor2 2200rpm 6.9 m/s Motor rpm m/s Motor4 2200rpm 6.9 m/s 23.06
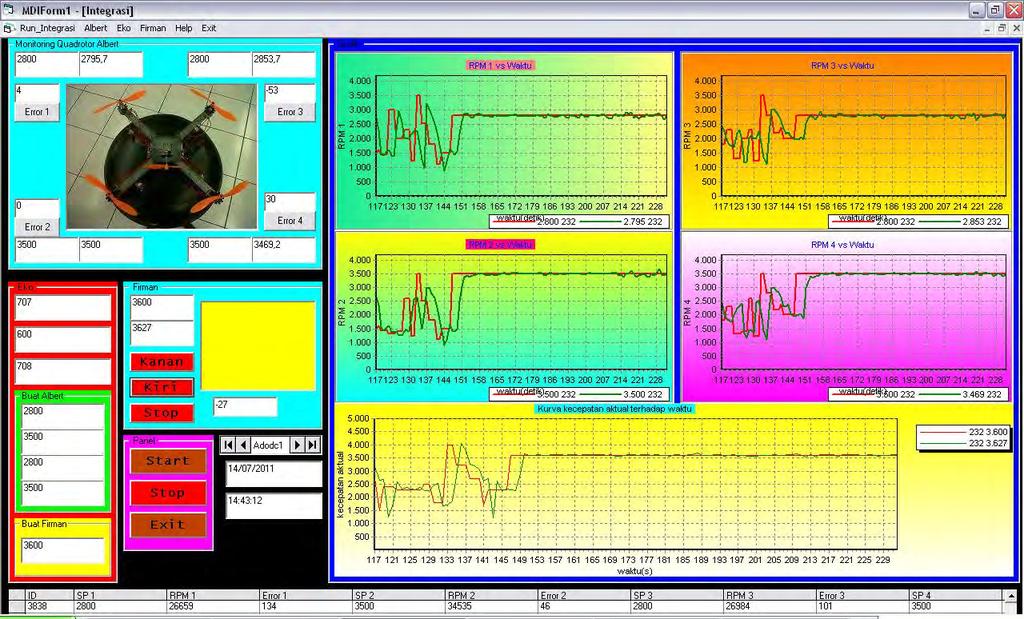
47 Integrasi
48 Respon setpoint vs motor Motor Maju Mundur kec. motor (rpm) setpoint motor waktu (s)
49 4050 Miring Kanan 3350 Miring Kiri kec.motor (rpm) kec. Motor (rpm) motor setpoint 3150 setpoint motor kec.motor (rpm) waktu (s) Mengangguk ke depan waktu (s) kec.motor (rpm) setpoint 3300 motor waktu (s) Mengangguk ke belakang waktu (s) setpoint motor1
50 kec. motor (rpm) kec. motor (rpm) maju mundur Motor setpoint motor waktu (s) Miring kiri setpoint motor1 kec. motor (rpm) kec. motor (rpm) Miring Kanan waktu (s) Mengangguk ke depan motor1 setpoint setpoint motor waktu (s) waktu (s)
51 4150 Mengangguk ke belakang 4100 kec. motor (rpm) setpoint motor waktu (s)
52 Motor 3 kec. motor (rpm) kec. motor (rpm) maju mundur miring kanan waktu (s) miring kiri waktu (s) setpoint motor1 kec. motor (rpm) setpoint 1500 motor kec. motor (rpm) waktu (s) mengangguk ke depan waktu (s) motor1 setpoint setpoint motor1
53 3550 mengangguk ke belakang kec.motor (rpm) setpoint motor waktu (s)
54 4150 maju mundur Motor miring kanan kec. motor (rpm) setpoint motor1 kec.motor (rpm) motor1 setpoint waktu (s) waktu (s) kec.motor (rpm) miring kiri setpoint motor1 kec.motor (rpm) mengangguk ke depan setpoint motor waktu (s)
55 4150 mengangguk ke belakang 4100 kec.motor (rpm) setpoint motor waktu (s)
56 Motor 5 kec. motor (rpm) maju mundur kec.motor (rpm) setpoint 2000 motor miring kanan motor1 setpoint waktu (s) waktu (s) miring kiri mengangguk ke depan kec.motor (rpm) setpoint motor1 kec.motor (rpm) setpoint motor waktu (s) waktu (s)
57 mengangguk ke belakang kec.motor (rpm) setpoint motor waktu (s)
58 Kesimpulan Attitude (sikap) dari quadrotor dapat dikendalikan dengan metode fuzzy logic Didapatkan 7 rules base untuk mengontrol attitude quadrotor. Rules base yang pertama yaitu menghasilkan setpoint untuk gerakan quadrotor maju mundur, dengan setpoint motor yang dihasilkan adalah untuk m1= 4100 rpm, m2= 4100 rpm, m3= 4100 rpm, m4= 4100 rpm, dan m5= 4500 rpm. Rules base yang kedua untuk gerakan quadrotor ke arah kiri yaitu m1= 3800 rpm, m2=3800 rpm, m3= 3400 rpm, m4= 3400 rpm dan m5= 4500 rpm. Rules base yang ketiga untuk gerakan quadrotor ke kanan menghasilkan setpoint untuk m1= 3100 rpm, m2=3100 rpm, m3=3900 rpm, m4=3900 rpm, dan m5= 3800 rpm. Dan rules base yang keempat untuk gerakan mengangguk ke depan menghasilkan setpoint m1=3900 rpm, m2=2500 rpm, m3=3900 rpm, m4= 2500 rpm dan m5=4900 rpm. Dan rules base yang ke lima untuk gerakan quadrotor mengangguk ke belakang m1= 3200rpm, m2= 4000 rpm, m3= 3200 rpm, m4= 4000 rpm dan m5= 4200 rpm.

59
BAB I PENDAHULUAN. 1.1 Latar Belakang
 BAB I PENDAHULUAN BAB 1. 1.1 Latar Belakang Gerak terbang pada pesawat tanpa awak atau yang sering disebut Unmanned Aerial Vehicle (UAV) ada berbagais macam, seperti melayang (hovering), gerak terbang
BAB I PENDAHULUAN BAB 1. 1.1 Latar Belakang Gerak terbang pada pesawat tanpa awak atau yang sering disebut Unmanned Aerial Vehicle (UAV) ada berbagais macam, seperti melayang (hovering), gerak terbang
Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini. Helmi Wiratran
 Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini 1 Helmi Wiratran 2209105020 2 Latarbelakang (1) Segway PT: Transportasi alternatif dengan
Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini 1 Helmi Wiratran 2209105020 2 Latarbelakang (1) Segway PT: Transportasi alternatif dengan
I. PENDAHULUAN. UAV (Unnmaned Aerial Vehicle) secara umum dapat diartikan sebuah wahana udara
 secara umum dapat diartikan sebuah wahana udara") I. PENDAHULUAN A. Latar Belakang UAV (Unnmaned Aerial Vehicle) secara umum dapat diartikan sebuah wahana udara jenis fixed-wing, rotary-wing, ataupun pesawat yang mampu mengudara pada jalur yang ditentukan
I. PENDAHULUAN A. Latar Belakang UAV (Unnmaned Aerial Vehicle) secara umum dapat diartikan sebuah wahana udara jenis fixed-wing, rotary-wing, ataupun pesawat yang mampu mengudara pada jalur yang ditentukan
PERANCANGAN SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS BERBASIS LOGIKA FUZZY MENGGUNAKAN SENSOR KAMERA
 Seminar Tugas Akhir PERANCANGAN SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS BERBASIS LOGIKA FUZZY MENGGUNAKAN SENSOR KAMERA Oleh : Andri Kuncoro NRP. 2406100042 Dosen Pembimbing : Ir. Moch. Ilyas Hs. NIP.194909191979031002
Seminar Tugas Akhir PERANCANGAN SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS BERBASIS LOGIKA FUZZY MENGGUNAKAN SENSOR KAMERA Oleh : Andri Kuncoro NRP. 2406100042 Dosen Pembimbing : Ir. Moch. Ilyas Hs. NIP.194909191979031002
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas perancangan serta penerapan pengendalian berbasis logika fuzzy pada sistem Fuzzy Logic Sebagai Kendali Pendingin Ruangan Menggunakan MATLAB. Dan simulasi
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas perancangan serta penerapan pengendalian berbasis logika fuzzy pada sistem Fuzzy Logic Sebagai Kendali Pendingin Ruangan Menggunakan MATLAB. Dan simulasi
SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8
 SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8 I Nyoman Benny Rismawan 1, Cok Gede Indra Partha 2, Yoga Divayana 3 Jurusan Teknik Elektro, Fakultas Teknik Universitas
SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8 I Nyoman Benny Rismawan 1, Cok Gede Indra Partha 2, Yoga Divayana 3 Jurusan Teknik Elektro, Fakultas Teknik Universitas
BAB I PENDAHULUAN. 1 Universitas Internasional Batam
 BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat terbang model UAV (Unmanned Aerial Vehicle) telah berkembang dengan sangat pesat dan menjadi salah satu area penelitian yang diprioritaskan. Beberapa jenis
BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat terbang model UAV (Unmanned Aerial Vehicle) telah berkembang dengan sangat pesat dan menjadi salah satu area penelitian yang diprioritaskan. Beberapa jenis
BAB I PENDAHULUAN. 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Dalam melakukan pengambilan gambar di udara, banyak media yang bisa digunakan dan dengan semakin berkembangnya teknologi saat ini terutama dalam ilmu pengetahuan, membuat
BAB I PENDAHULUAN 1.1 Latar Belakang Dalam melakukan pengambilan gambar di udara, banyak media yang bisa digunakan dan dengan semakin berkembangnya teknologi saat ini terutama dalam ilmu pengetahuan, membuat
BAB I PENDAHULUAN 1.1. Latar Belakang Pesawat tanpa awak atau pesawat nirawak (Unmanned Aerial Vehicle atau disingkat UAV), adalah sebuah mesin
, adalah sebuah mesin") BAB I PENDAHULUAN 1.1. Latar Belakang Pesawat tanpa awak atau pesawat nirawak (Unmanned Aerial Vehicle atau disingkat UAV), adalah sebuah mesin terbang yang berfungsi dengan kendali jarak jauh oleh pilot
BAB I PENDAHULUAN 1.1. Latar Belakang Pesawat tanpa awak atau pesawat nirawak (Unmanned Aerial Vehicle atau disingkat UAV), adalah sebuah mesin terbang yang berfungsi dengan kendali jarak jauh oleh pilot
BAB I PENDAHULUAN 1.1 Latar Belakang
 2 BAB I PENDAHULUAN 1.1 Latar Belakang Saat ini teknologi di bidang penerbangan sudah sangat maju. Pesawat terbang sudah dapat dikendalikan secara jarak jauh sehingga memungkinkan adanya suatu pesawat
2 BAB I PENDAHULUAN 1.1 Latar Belakang Saat ini teknologi di bidang penerbangan sudah sangat maju. Pesawat terbang sudah dapat dikendalikan secara jarak jauh sehingga memungkinkan adanya suatu pesawat
BAB III PERANCANGAN Sistem Kontrol Robot. Gambar 3.1. Blok Diagram Sistem
 BAB III PERANCANGAN Pada bab ini akan dijelaskan mengenai perancangan sistem yang meliputi sistem kontrol logika fuzzy, perancangan perangkat keras robot, dan perancangan perangkat lunak dalam pengimplementasian
BAB III PERANCANGAN Pada bab ini akan dijelaskan mengenai perancangan sistem yang meliputi sistem kontrol logika fuzzy, perancangan perangkat keras robot, dan perancangan perangkat lunak dalam pengimplementasian
Rancang Bangun Sistem Takeoff Unmanned Aerial Vehicle Quadrotor Berbasis Sensor Jarak Inframerah
 JURNAL TEKNIK ITS Vol. 1, No. 1 (Sept. 2012) ISSN: 2301-9271 F-50 Rancang Bangun Sistem Takeoff Unmanned Aerial Vehicle Quadrotor Berbasis Sensor Jarak Inframerah Bardo Wenang, Rudy Dikairono, ST., MT.,
JURNAL TEKNIK ITS Vol. 1, No. 1 (Sept. 2012) ISSN: 2301-9271 F-50 Rancang Bangun Sistem Takeoff Unmanned Aerial Vehicle Quadrotor Berbasis Sensor Jarak Inframerah Bardo Wenang, Rudy Dikairono, ST., MT.,
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api
 Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
metode pengontrolan konvensional yaitu suatu metode yang dapat melakukan penalaan secara mandiri (Pogram, 2014). 1.2 Rumusan Masalah Dari latar
. 1.2 Rumusan Masalah Dari latar") BAB I PENDAHULUAN 1.1 Latar Belakang Quadrotor adalah sebuah pesawat tanpa awak atau UAV (Unmanned Aerial Vehicle) yang memiliki kemampuan lepas landas secara vertikal atau VTOL (Vertical Take off Landing).
BAB I PENDAHULUAN 1.1 Latar Belakang Quadrotor adalah sebuah pesawat tanpa awak atau UAV (Unmanned Aerial Vehicle) yang memiliki kemampuan lepas landas secara vertikal atau VTOL (Vertical Take off Landing).
DAFTAR ISI. HALAMAN JUDUL... i. HALAMAN PENGESAHAN... ii. HALAMAN PERNYATAAN... iii. KATA PENGANTAR... iv. MOTO DAN PERSEMBAHAN... v. DAFTAR ISI...
 DAFTAR ISI HALAMAN JUDUL... i HALAMAN PENGESAHAN... ii HALAMAN PERNYATAAN... iii KATA PENGANTAR... iv MOTO DAN PERSEMBAHAN... v DAFTAR ISI... vi DAFTAR GAMBAR... viii DAFTAR TABEL... x ABSTRAK... xi ABSTRACT...
DAFTAR ISI HALAMAN JUDUL... i HALAMAN PENGESAHAN... ii HALAMAN PERNYATAAN... iii KATA PENGANTAR... iv MOTO DAN PERSEMBAHAN... v DAFTAR ISI... vi DAFTAR GAMBAR... viii DAFTAR TABEL... x ABSTRAK... xi ABSTRACT...
PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER
 TUGAS AKHIR TE 091399 PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER 38-714 Nur Muhlis NRP 2208 100 662 JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut
TUGAS AKHIR TE 091399 PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER 38-714 Nur Muhlis NRP 2208 100 662 JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut
PREDIKSI KECEPATAN ROTASI KOMPRESOR MESIN PESAWAT BOEING MENGGUNAKAN LOGIKA FUZZY
 Seminar Tugas Akhir PREDIKSI KECEPATAN ROTASI KOMPRESOR MESIN PESAWAT BOEING 737-300 MENGGUNAKAN LOGIKA FUZZY O L E H : N U R R O H MAN A N D I K A R D I A N P E M BIMBING : D R. I R. A U L I A S I T I
Seminar Tugas Akhir PREDIKSI KECEPATAN ROTASI KOMPRESOR MESIN PESAWAT BOEING 737-300 MENGGUNAKAN LOGIKA FUZZY O L E H : N U R R O H MAN A N D I K A R D I A N P E M BIMBING : D R. I R. A U L I A S I T I
GPENELITIAN MANDIRI RANCANG BANGUN SISTEM KENDALI MOTOR DC MENGGUNAKAN FUZZY LOGIC BERBASIS MIKROKONTROLER
 GPENELITIAN MANDIRI RANCANG BANGUN SISTEM KENDALI MOTOR DC MENGGUNAKAN FUZZY LOGIC BERBASIS MIKROKONTROLER Hendra Kusdarwanto Jurusan Fisika Unibraw Universitas Brawijaya Malang [email protected] ABSTRAK
GPENELITIAN MANDIRI RANCANG BANGUN SISTEM KENDALI MOTOR DC MENGGUNAKAN FUZZY LOGIC BERBASIS MIKROKONTROLER Hendra Kusdarwanto Jurusan Fisika Unibraw Universitas Brawijaya Malang [email protected] ABSTRAK
Oleh : Abi Nawang Gustica Pembimbing : 1. Dr. Muhammad Rivai, ST., MT. 2. Ir. Tasripan, MT.
 Implementasi Sensor Gas pada Kontrol Lengan Robot untuk Mencari Sumber Gas (The Implementation of Gas Sensors on the Robotic Arm Control to Locate Gas Source ) Oleh : Abi Nawang Gustica Pembimbing : 1.
Implementasi Sensor Gas pada Kontrol Lengan Robot untuk Mencari Sumber Gas (The Implementation of Gas Sensors on the Robotic Arm Control to Locate Gas Source ) Oleh : Abi Nawang Gustica Pembimbing : 1.
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat udara tanpa awak atau Unmanned Aerial Vehicle (UAV) adalah sebuah pesawat terbang yang dapat dikendalikan secara jarak jauh oleh pilot atau dengan mengendalikan
BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat udara tanpa awak atau Unmanned Aerial Vehicle (UAV) adalah sebuah pesawat terbang yang dapat dikendalikan secara jarak jauh oleh pilot atau dengan mengendalikan
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang UAV (Unmanned Aerial Vehicle) atau biasa disebut pesawat tanpa awak saat ini sedang mengalami perkembangan yang sangat pesat di dunia. Penggunaan UAV dikategorikan
BAB 1 PENDAHULUAN 1.1 Latar Belakang UAV (Unmanned Aerial Vehicle) atau biasa disebut pesawat tanpa awak saat ini sedang mengalami perkembangan yang sangat pesat di dunia. Penggunaan UAV dikategorikan
BAB I PENDAHULUAN 1.1 Latar Belakang dan Permasalahan
 BAB I PENDAHULUAN 1.1 Latar Belakang dan Permasalahan Pesawat tanpa awak atau Unmanned Aerial Vehicle (UAV) kini menjadi suatu kebutuhan di dalam kehidupan untuk berbagai tujuan dan fungsi. Desain dari
BAB I PENDAHULUAN 1.1 Latar Belakang dan Permasalahan Pesawat tanpa awak atau Unmanned Aerial Vehicle (UAV) kini menjadi suatu kebutuhan di dalam kehidupan untuk berbagai tujuan dan fungsi. Desain dari
PERANCANGAN DAN IMPLEMENTASI KONTROLER FUZZY PREDIKTIF UNTUK TRACKING KETINGGIAN AKTUAL PADA UAV (UNMANNED AERIAL VEHICLE)
") PERANCANGAN DAN IMPLEMENTASI KONTROLER FUZZY PREDIKTIF UNTUK TRACKING KETINGGIAN AKTUAL PADA UAV (UNMANNED AERIAL VEHICLE) THORIKUL HUDA 2209106030 Dosen Pembimbing Ir. Rusdhianto Effendie A.K, M.T. 1
PERANCANGAN DAN IMPLEMENTASI KONTROLER FUZZY PREDIKTIF UNTUK TRACKING KETINGGIAN AKTUAL PADA UAV (UNMANNED AERIAL VEHICLE) THORIKUL HUDA 2209106030 Dosen Pembimbing Ir. Rusdhianto Effendie A.K, M.T. 1
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Perkembangan sistem ilmu pengetahuan dan teknologi semakin pesat di abad ke- 21 ini, khususnya dalam bidang penerbangan. Pada dekade terakhir dunia penerbangan mengalami
BAB 1 PENDAHULUAN 1.1 Latar Belakang Perkembangan sistem ilmu pengetahuan dan teknologi semakin pesat di abad ke- 21 ini, khususnya dalam bidang penerbangan. Pada dekade terakhir dunia penerbangan mengalami
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi UAV (Unmanned Aerial Vehicle) atau UAS (Unmanned Aircraft System) merupakan salah satu teknologi kedirgantaraan yang saat ini sedang berkembang dengan pesat.
BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi UAV (Unmanned Aerial Vehicle) atau UAS (Unmanned Aircraft System) merupakan salah satu teknologi kedirgantaraan yang saat ini sedang berkembang dengan pesat.
Kontrol Keseimbangan Robot Mobil Beroda Dua Dengan. Metode Logika Fuzzy
 SKRIPSI Kontrol Keseimbangan Robot Mobil Beroda Dua Dengan Metode Logika Fuzzy Laporan ini disusun guna memenuhi salah satu persyaratan untuk menyelesaikan program S-1 Teknik Elektro Fakultas Teknik Universitas
SKRIPSI Kontrol Keseimbangan Robot Mobil Beroda Dua Dengan Metode Logika Fuzzy Laporan ini disusun guna memenuhi salah satu persyaratan untuk menyelesaikan program S-1 Teknik Elektro Fakultas Teknik Universitas
BAB II LANDASAN TEORI. Pada bab ini berisi tentang teori mengenai permasalahan yang akan dibahas
 BAB II LANDASAN TEORI Pada bab ini berisi tentang teori mengenai permasalahan yang akan dibahas dalam pembuatan tugas akhir ini. Secara garis besar teori penjelasan akan dimulai dari definisi logika fuzzy,
BAB II LANDASAN TEORI Pada bab ini berisi tentang teori mengenai permasalahan yang akan dibahas dalam pembuatan tugas akhir ini. Secara garis besar teori penjelasan akan dimulai dari definisi logika fuzzy,
BAB I PENDAHULUAN Latar Belakang
 BAB I PENDAHULUAN 1. 1. Latar Belakang Seiring dengan perkembangan zaman, teknologi di bidang transportasi terus berkembang pesat. Hal ini ditandai dengan bermunculannya kendaraan yang modern dan praktis
BAB I PENDAHULUAN 1. 1. Latar Belakang Seiring dengan perkembangan zaman, teknologi di bidang transportasi terus berkembang pesat. Hal ini ditandai dengan bermunculannya kendaraan yang modern dan praktis
APLIKASI FIS MODEL SUGENO PADA PENGENDALIAN VALVE UNTUK MANGATUR TINGGI LEVEL AIR. Wahyudi, Iwan Setiawan, dan Martina Nainggolan *)
") APLIKASI FIS MODEL SUGENO PADA PENGENDALIAN VALVE UNTUK MANGATUR TINGGI LEVEL AIR Wahyudi, Iwan Setiawan, dan Martina Nainggolan *) Abstract Fuzzy control is one of the controller alternative using expert
APLIKASI FIS MODEL SUGENO PADA PENGENDALIAN VALVE UNTUK MANGATUR TINGGI LEVEL AIR Wahyudi, Iwan Setiawan, dan Martina Nainggolan *) Abstract Fuzzy control is one of the controller alternative using expert
KONTROL LEVEL AIR DENGAN FUZZY LOGIC BERBASIS MIKROKONTROLER ATMEGA 8535
 KONTROL LEVEL AIR DENGAN FUZZY LOGIC BERBASIS MIKROKONTROLER ATMEGA 8535 Boby Wisely Ziliwu/ 0622031 E-mail : [email protected] Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha
KONTROL LEVEL AIR DENGAN FUZZY LOGIC BERBASIS MIKROKONTROLER ATMEGA 8535 Boby Wisely Ziliwu/ 0622031 E-mail : [email protected] Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha
IMPLEMENTASI KONTROL LOGIKA FUZZY PADA SISTEM KESETIMBANGAN ROBOT BERODA DUA
 IMPLEMENTASI KONTROL LOGIKA FUZZY PADA SISTEM KESETIMBANGAN ROBOT BERODA DUA Shanty Puspitasari¹, Gugus Dwi Nusantoro, ST., MT 2., M. Aziz Muslim, ST., MT., Ph.D 3, ¹Mahasiswa Teknik Elektro. 2 Dosen Teknik
IMPLEMENTASI KONTROL LOGIKA FUZZY PADA SISTEM KESETIMBANGAN ROBOT BERODA DUA Shanty Puspitasari¹, Gugus Dwi Nusantoro, ST., MT 2., M. Aziz Muslim, ST., MT., Ph.D 3, ¹Mahasiswa Teknik Elektro. 2 Dosen Teknik
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Sebuah Unmanned Aerial Vehicle (UAV) merupakan pesawat tanpa awak yang dikendalikan dari jarak jauh atau diterbangkan secara mandiri yang dilakukan pemrograman terlebih
BAB I PENDAHULUAN 1.1 Latar Belakang Sebuah Unmanned Aerial Vehicle (UAV) merupakan pesawat tanpa awak yang dikendalikan dari jarak jauh atau diterbangkan secara mandiri yang dilakukan pemrograman terlebih
Penerapan Fuzzy Logic untuk Pembatasan Jumlah Partikel Pada Aplikasi yang Menggunakan Sistem Partikel
 Penerapan Fuzzy Logic untuk Pembatasan Jumlah Partikel Pada Aplikasi yang Menggunakan Sistem Partikel Biolardi Yoshogi (13509035) Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika
Penerapan Fuzzy Logic untuk Pembatasan Jumlah Partikel Pada Aplikasi yang Menggunakan Sistem Partikel Biolardi Yoshogi (13509035) Program Studi Teknik Informatika Sekolah Teknik Elektro dan Informatika
MAKALAH SEMINAR TUGAS AKHIR PENGENDALIAN TINGGI MUKA CAIRAN PADA PLANT NONLINEAR MENGGUNAKAN METODE KONTROL FUZZY
 MAKALAH SEMINAR TUGAS AKHIR PENGENDALIAN TINGGI MUKA CAIRAN PADA PLANT NONLINEAR MENGGUNAKAN METODE KONTROL FUZZY Doni Salami 1, Iwan Setiawan 2, Wahyudi 2 Jurusan Teknik Elektro, Fakultas Teknik, Universitas
MAKALAH SEMINAR TUGAS AKHIR PENGENDALIAN TINGGI MUKA CAIRAN PADA PLANT NONLINEAR MENGGUNAKAN METODE KONTROL FUZZY Doni Salami 1, Iwan Setiawan 2, Wahyudi 2 Jurusan Teknik Elektro, Fakultas Teknik, Universitas
BAB III ANALISIS DAN PERANCANGAN SISTEM
 BAB III ANALISIS DAN PERANCANGAN SISTEM 3. 1. Spesifikasi Sistem Pada tugas akhir ini, penulis membuat sebuah prototype dari kendaraan skuter seimbang. Skuter seimbang tersebut memiliki spesifikasi sebagai
BAB III ANALISIS DAN PERANCANGAN SISTEM 3. 1. Spesifikasi Sistem Pada tugas akhir ini, penulis membuat sebuah prototype dari kendaraan skuter seimbang. Skuter seimbang tersebut memiliki spesifikasi sebagai
Jurusan Teknik Elektro Fakultas Teknik Universitas Brawijaya Jalan MT. Haryono 167, Malang 65145, Indonesia
 APLIKASI PENGENDALI SUHU RUANGAN DENGAN KONTROLER LOGIKA FUZZY BERBASIS MIKROKONTROLER AVR-ATMEGA 328 Diyan Agung W. 1, Ir. Purwanto MT. 2, Ir.Bambang Siswojo MT. 2 1 Mahasiswa Teknik Elektro Univ. Brawijaya,
APLIKASI PENGENDALI SUHU RUANGAN DENGAN KONTROLER LOGIKA FUZZY BERBASIS MIKROKONTROLER AVR-ATMEGA 328 Diyan Agung W. 1, Ir. Purwanto MT. 2, Ir.Bambang Siswojo MT. 2 1 Mahasiswa Teknik Elektro Univ. Brawijaya,
BAB III METODE PENELITIAN. diperlukan dengan beberapa cara yang dilakukan, antara lain:
 BAB III METODE PENELITIAN Dalam pembuatan kendali robot omni dengan accelerometer dan keypad pada smartphone dilakukan beberapa tahapan awal yaitu pengumpulan data yang diperlukan dengan beberapa cara
BAB III METODE PENELITIAN Dalam pembuatan kendali robot omni dengan accelerometer dan keypad pada smartphone dilakukan beberapa tahapan awal yaitu pengumpulan data yang diperlukan dengan beberapa cara
PERANCANGAN KONTROLER LOGIKA FUZZY UNTUK TRACKING CONTROL PADA ROBOT SUMO
 PERANCANGAN KONTROLER LOGIKA FUZZY UNTUK TRACKING CONTROL PADA ROBOT SUMO STANDAR OPERASI PROSEDUR (S.O.P) Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro
PERANCANGAN KONTROLER LOGIKA FUZZY UNTUK TRACKING CONTROL PADA ROBOT SUMO STANDAR OPERASI PROSEDUR (S.O.P) Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro
IMPEMENTASI KONTROL PID DAN FUZZY LOGIC UNTUK SISTEM KONTROL KECEPATAN MOTOR DC SEBAGAI APLIKASI PRAKTIKUM KONTROL DIGITAL
 ISSN : 2355-9365 e-proceeding of Engineering : Vol.3, No.3 December 2016 Page 4135 IMPEMENTASI KONTROL PID DAN FUZZY LOGIC UNTUK SISTEM KONTROL KECEPATAN MOTOR DC SEBAGAI APLIKASI PRAKTIKUM KONTROL DIGITAL
ISSN : 2355-9365 e-proceeding of Engineering : Vol.3, No.3 December 2016 Page 4135 IMPEMENTASI KONTROL PID DAN FUZZY LOGIC UNTUK SISTEM KONTROL KECEPATAN MOTOR DC SEBAGAI APLIKASI PRAKTIKUM KONTROL DIGITAL
BAB I PENDAHULUAN 1.1. Latar Belakang
 1 BAB I PENDAHULUAN 1.1. Latar Belakang UAV (Unmanned Aireal Vehicle) adalah pesawat tanpa awak yang dapat berotasi secara mandiri atau dikendalikan dari jarak jauh oleh seorang pilot (Bone, 2003). Pada
1 BAB I PENDAHULUAN 1.1. Latar Belakang UAV (Unmanned Aireal Vehicle) adalah pesawat tanpa awak yang dapat berotasi secara mandiri atau dikendalikan dari jarak jauh oleh seorang pilot (Bone, 2003). Pada
BAB I PENDAHULUAN 1.1 Latar Belakang
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Jalan raya adalah prasarana transportasi darat yang meliputi segala bagian jalan, termasuk bangunan pelengkap dan perlengkapannya yang diperuntukkan bagi lalu lintas,
1 BAB I PENDAHULUAN 1.1 Latar Belakang Jalan raya adalah prasarana transportasi darat yang meliputi segala bagian jalan, termasuk bangunan pelengkap dan perlengkapannya yang diperuntukkan bagi lalu lintas,
TUGAS AKHIR TE
 TUGAS AKHIR TE 090362 KARTU TOL ELEKTRONIK MENGGUNAKAN RFID (RADIO FREQUENCY IDENTIFICATION) BERBASIS WEB DOSEN PEMBIMBING PUJIONO, S.T., M.T. PROGRAM STUDI D3 TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
TUGAS AKHIR TE 090362 KARTU TOL ELEKTRONIK MENGGUNAKAN RFID (RADIO FREQUENCY IDENTIFICATION) BERBASIS WEB DOSEN PEMBIMBING PUJIONO, S.T., M.T. PROGRAM STUDI D3 TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
Ahmadi *1), Richa Watiasih a), Ferry Wimbanu A a)
, Richa Watiasih a), Ferry Wimbanu A a)") Prosiding Seminar Nasional Teknologi Elektro Terapan 2017 Vol.01 No.01, ISSN: 2581-0049 Ahmadi *1), Richa Watiasih a), Ferry Wimbanu A a) Abstrak: Pada penelitian ini metode Fuzzy Logic diterapkan untuk
Prosiding Seminar Nasional Teknologi Elektro Terapan 2017 Vol.01 No.01, ISSN: 2581-0049 Ahmadi *1), Richa Watiasih a), Ferry Wimbanu A a) Abstrak: Pada penelitian ini metode Fuzzy Logic diterapkan untuk
BAB 1 PENDAHULUAN 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Salah satu perkembangan teknologi yang popular adalah teknologi bidang robotika. Robot mengambil peran yang penting dalam menangani tugas-tugas yang biasanya ditangani
BAB 1 PENDAHULUAN 1.1 Latar Belakang Salah satu perkembangan teknologi yang popular adalah teknologi bidang robotika. Robot mengambil peran yang penting dalam menangani tugas-tugas yang biasanya ditangani
Grafik hubungan antara Jarak (cm) terhadap Data pengukuran (cm) y = 0.950x Data pengukuran (cm) Gambar 9 Grafik fungsi persamaan gradien
 terhadap Data pengukuran (cm) y = 0.950x Data pengukuran (cm) Gambar 9 Grafik fungsi persamaan gradien") dapat bekerja tetapi tidak sempurna. Oleh karena itu, agar USART bekerja dengan baik dan sempurna, maka error harus diperkecil sekaligus dihilangkan. Cara menghilangkan error tersebut digunakan frekuensi
dapat bekerja tetapi tidak sempurna. Oleh karena itu, agar USART bekerja dengan baik dan sempurna, maka error harus diperkecil sekaligus dihilangkan. Cara menghilangkan error tersebut digunakan frekuensi
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 2.1 Pengenalan Pengaturan keseimbangan robot merupakan suatu cara agar robot dapat setimbang. Dengan menggunakan 2 roda maka akan lebih efisien dalam hal material dan juga karena tidak
BAB 2 LANDASAN TEORI 2.1 Pengenalan Pengaturan keseimbangan robot merupakan suatu cara agar robot dapat setimbang. Dengan menggunakan 2 roda maka akan lebih efisien dalam hal material dan juga karena tidak
BAB I PENDAHULUAN 1.1 Latar Belakang Parrot AR. Drone
 BAB I PENDAHULUAN 1.1 Latar Belakang Quadrotor merupakan salah satu jenis Unmanned Aerial Vehicle (UAV) atau pesawat tanpa awak yang memiliki empat buah baling-baling (rotor) yang biasa juga disebut quadcopter.
BAB I PENDAHULUAN 1.1 Latar Belakang Quadrotor merupakan salah satu jenis Unmanned Aerial Vehicle (UAV) atau pesawat tanpa awak yang memiliki empat buah baling-baling (rotor) yang biasa juga disebut quadcopter.
BAB III METODOLOGI 3.1. PENDAHULUAN
 BAB III METODOLOGI 3.1. PENDAHULUAN Dalam melakukan studi Tugas Akhir diperlukan metodologi yang akan digunakan agar studi ini dapat berjalan sesuai dengan koridor yang telah direncanakan di awal. Dalam
BAB III METODOLOGI 3.1. PENDAHULUAN Dalam melakukan studi Tugas Akhir diperlukan metodologi yang akan digunakan agar studi ini dapat berjalan sesuai dengan koridor yang telah direncanakan di awal. Dalam
BAB I PENDAHULUAN 1.1. Latar Belakang
 BAB I PENDAHULUAN 1.1. Latar Belakang Seiring perkembangan teknologi telekomunikasi dan dirgantara dapat menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokal tertentu dengan
BAB I PENDAHULUAN 1.1. Latar Belakang Seiring perkembangan teknologi telekomunikasi dan dirgantara dapat menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokal tertentu dengan
IMPLEMENTASI KONTROL PID PADA PERGERAKAN LARAS MORTIR 81MM SESUAI DENGAN HASIL PERHITUNGAN KOREKSI TEMBAKAN
 IMPLEMENTASI KONTROL PID PADA PERGERAKAN LARAS MORTIR 81MM SESUAI DENGAN HASIL PERHITUNGAN KOREKSI TEMBAKAN Dimas Silvani F.H 1*, Abd. Rabi 1, Jeki Saputra 2 1 Program Studi Teknik Elektro, Fakultas Teknik,
IMPLEMENTASI KONTROL PID PADA PERGERAKAN LARAS MORTIR 81MM SESUAI DENGAN HASIL PERHITUNGAN KOREKSI TEMBAKAN Dimas Silvani F.H 1*, Abd. Rabi 1, Jeki Saputra 2 1 Program Studi Teknik Elektro, Fakultas Teknik,
BAB 3 PERANCANGAN SISTEM
 BAB 3 PERANCANGAN SISTEM 3.1 Perancangan Sistem Secara Umum Sistem pada penelitian ini akan menyeimbangkan posisi penampang robot dengan mengenal perubahan posisi dan kemudian mengatur kecepatan. Setiap
BAB 3 PERANCANGAN SISTEM 3.1 Perancangan Sistem Secara Umum Sistem pada penelitian ini akan menyeimbangkan posisi penampang robot dengan mengenal perubahan posisi dan kemudian mengatur kecepatan. Setiap
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Unmanned aerial vehicles (UAVs) atau wahana tanpa awak merupakan wahana terbang tanpa ada yang mengendalikan penerbangan wahana tersebut. Sebuah UAV dapat berupa pesawat
BAB 1 PENDAHULUAN 1.1 Latar Belakang Unmanned aerial vehicles (UAVs) atau wahana tanpa awak merupakan wahana terbang tanpa ada yang mengendalikan penerbangan wahana tersebut. Sebuah UAV dapat berupa pesawat
JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER
 Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta 24 08 100 068 Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK
Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta 24 08 100 068 Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK
SIDANG TUGAS AKHIR IMPLEMENTASI FUZZY RULES UNTUK PERENCANAAN DAN PENENTUAN PRIORITAS DI PDAM KOTA SURABAYA. oleh: WINDA ZULVINA
 SIDANG TUGAS AKHIR IMPLEMENTASI FUZZY RULES UNTUK PERENCANAAN DAN PENENTUAN PRIORITAS PEMELIHARAAN PERALATAN PRODUKSI DI PDAM KOTA SURABAYA oleh: WINDA ZULVINA 5206100040 Dosen Pembimbing : Mahendrawathi
SIDANG TUGAS AKHIR IMPLEMENTASI FUZZY RULES UNTUK PERENCANAAN DAN PENENTUAN PRIORITAS PEMELIHARAAN PERALATAN PRODUKSI DI PDAM KOTA SURABAYA oleh: WINDA ZULVINA 5206100040 Dosen Pembimbing : Mahendrawathi
BAB IV PENGUJIAN SISTEM. Pengujian minimum system bertujuan untuk mengetahui apakah minimum
 BAB IV PENGUJIAN SISTEM Pengujian sistem yang dilakukan penulis merupakan pengujian terhadap perangkat keras dan.perangkat lunak dari sistem secara keseluruhan yang telah selesai dibuat untuk mengetahui
BAB IV PENGUJIAN SISTEM Pengujian sistem yang dilakukan penulis merupakan pengujian terhadap perangkat keras dan.perangkat lunak dari sistem secara keseluruhan yang telah selesai dibuat untuk mengetahui
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1. Latar Belakang Masalah UAV (Unmanned Aerial Vehicle) adalah sebuah sistem pesawat udara yang tidak memiliki awak yang berada di dalam pesawat (onboard). Keberadaan awak pesawat digantikan
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah UAV (Unmanned Aerial Vehicle) adalah sebuah sistem pesawat udara yang tidak memiliki awak yang berada di dalam pesawat (onboard). Keberadaan awak pesawat digantikan
Penggunaan Sensor Kesetimbangan Accelerometer dan Sensor Halangan Ultrasonic pada Aplikasi Robot Berkaki Dua
 Volume 1 Nomor 2, April 217 e-issn : 2541-219 p-issn : 2541-44X Penggunaan Sensor Kesetimbangan Accelerometer dan Sensor Halangan Ultrasonic pada Aplikasi Robot Berkaki Dua Abdullah Sekolah Tinggi Teknik
Volume 1 Nomor 2, April 217 e-issn : 2541-219 p-issn : 2541-44X Penggunaan Sensor Kesetimbangan Accelerometer dan Sensor Halangan Ultrasonic pada Aplikasi Robot Berkaki Dua Abdullah Sekolah Tinggi Teknik
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari algoritma robot. 3.1. Sistem Kontrol Sistem kontrol pergerakan pada robot dibagi
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari algoritma robot. 3.1. Sistem Kontrol Sistem kontrol pergerakan pada robot dibagi
BAB I PENDAHULUAN. dibutuhkan sistem kendali yang efektif, efisien dan tepat. Sesuai dengan
 BAB I PENDAHULUAN 1.1 Latar Belakang Motor DC (Direct Current) adalah motor yang menggunakan sumber tegangan searah. Terdapat beberapa jenis motor DC yang tersedia, diantaranya adalah motor DC dengan kumparan
BAB I PENDAHULUAN 1.1 Latar Belakang Motor DC (Direct Current) adalah motor yang menggunakan sumber tegangan searah. Terdapat beberapa jenis motor DC yang tersedia, diantaranya adalah motor DC dengan kumparan
Implementasi Fuzzy Logic Untuk Mengatur Banyak Air Pada Tanaman Mawar Berdasarkan Suhu Dan Kelembaban
 Implementasi Fuzzy Logic Untuk Mengatur Banyak Air Pada Tanaman Mawar Berdasarkan Suhu Dan Kelembaban Lingga Dwi Putra 1, Joke Pratilastiarso 2, Endro Wahjono 3 1. Mahasiswa Jurusan Teknik Elektro Industri
Implementasi Fuzzy Logic Untuk Mengatur Banyak Air Pada Tanaman Mawar Berdasarkan Suhu Dan Kelembaban Lingga Dwi Putra 1, Joke Pratilastiarso 2, Endro Wahjono 3 1. Mahasiswa Jurusan Teknik Elektro Industri
Rancang Bangun Prototipe Kapal Tanpa Awak Menggunakan Mikrokontroler
 Rancang Bangun Prototipe Kapal Tanpa Awak Menggunakan Mikrokontroler Dosen Pembimbing: Suwito, ST., MT. Yoga Uta Nugraha 2210 039 025 Ainul Khakim 2210 039 026 Jurusan D3 Teknik Elektro Fakultas Teknologi
Rancang Bangun Prototipe Kapal Tanpa Awak Menggunakan Mikrokontroler Dosen Pembimbing: Suwito, ST., MT. Yoga Uta Nugraha 2210 039 025 Ainul Khakim 2210 039 026 Jurusan D3 Teknik Elektro Fakultas Teknologi
TUGAS AKHIR - TE
 TUGAS AKHIR - TE 091399 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID UNTUK PENGATURAN ARAH DAN PENGATURAN HEADING PADA FIXED-WING UAV (UNMANNED AERIAL VEHICLE) Hery Setyo Widodo NRP. 2208100176 Laboratorium
TUGAS AKHIR - TE 091399 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID UNTUK PENGATURAN ARAH DAN PENGATURAN HEADING PADA FIXED-WING UAV (UNMANNED AERIAL VEHICLE) Hery Setyo Widodo NRP. 2208100176 Laboratorium
Bab III TEORI DAN PENGONTOR BERBASIS LOGIKA FUZZI
 Bab III TEORI DAN PENGONTOR BERBASIS LOGIKA FUZZI III.1 Teori Logika fuzzi III.1.1 Logika fuzzi Secara Umum Logika fuzzi adalah teori yang memetakan ruangan input ke ruang output dengan menggunakan aturan-aturan
Bab III TEORI DAN PENGONTOR BERBASIS LOGIKA FUZZI III.1 Teori Logika fuzzi III.1.1 Logika fuzzi Secara Umum Logika fuzzi adalah teori yang memetakan ruangan input ke ruang output dengan menggunakan aturan-aturan
SISTEM KENDALI LOGIKA FUZZY PADA KESETIMBANGAN PENDULUM TERBALIK BERBASIS MIKROKONTROLER
 SISTEM KENDALI LOGIKA FUZZY PADA KESETIMBANGAN PENDULUM TERBALIK BERBASIS MIKROKONTROLER Oleh Ranjit Hendriyanto NIM : 612006066 Skripsi Untuk melengkapi syarat-syarat memperoleh Ijazah Sarjana Teknik
SISTEM KENDALI LOGIKA FUZZY PADA KESETIMBANGAN PENDULUM TERBALIK BERBASIS MIKROKONTROLER Oleh Ranjit Hendriyanto NIM : 612006066 Skripsi Untuk melengkapi syarat-syarat memperoleh Ijazah Sarjana Teknik
BAB II: TINJAUAN PUSTAKA
 BAB II: TINJAUAN PUSTAKA Bab ini akan memberikan penjelasan awal mengenai konsep logika fuzzy beserta pengenalan sistem inferensi fuzzy secara umum. 2.1 LOGIKA FUZZY Konsep mengenai logika fuzzy diawali
BAB II: TINJAUAN PUSTAKA Bab ini akan memberikan penjelasan awal mengenai konsep logika fuzzy beserta pengenalan sistem inferensi fuzzy secara umum. 2.1 LOGIKA FUZZY Konsep mengenai logika fuzzy diawali
Herry gunawan wibisono Pembimbing : Ir. Syamsul Arifin, MT
 PERANCANGAN SISTEM PENGENDALIAN DAYA REAKTOR NUKLIR MENGGUNAKAN LOGIKA FUZZY DI PUSAT TEKNOLOGI NUKLIR BAHAN DAN RADIOMETRI BADAN TENAGA NUKLIR NASIONAL (PTNBR BATAN) BANDUNG Herry gunawan wibisono 2406
PERANCANGAN SISTEM PENGENDALIAN DAYA REAKTOR NUKLIR MENGGUNAKAN LOGIKA FUZZY DI PUSAT TEKNOLOGI NUKLIR BAHAN DAN RADIOMETRI BADAN TENAGA NUKLIR NASIONAL (PTNBR BATAN) BANDUNG Herry gunawan wibisono 2406
SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KONTROL BERBASIS LOGIKA FUZZY UNTUK MENGHINDARI BENDA ASING DI PERAIRAN TANJUNG PERAK
 SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KONTROL BERBASIS LOGIKA FUZZY UNTUK MENGHINDARI BENDA ASING DI PERAIRAN TANJUNG PERAK Oleh: Anita Faruchi 2407 100 048 Dosen Pembimbing: Dr. Ir. Aulia Siti Aisyah,
SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KONTROL BERBASIS LOGIKA FUZZY UNTUK MENGHINDARI BENDA ASING DI PERAIRAN TANJUNG PERAK Oleh: Anita Faruchi 2407 100 048 Dosen Pembimbing: Dr. Ir. Aulia Siti Aisyah,
PERANCANGAN PROTOTYPE ROBOT SOUND TRACKER BERBASIS MIKROKONTROLER DENGAN METODE FUZZY LOGIC
 PERANCANGAN PROTOTYPE ROBOT SOUND TRACKER BERBASIS MIKROKONTROLER DENGAN METODE FUZZY LOGIC SKRIPSI Oleh MUHAMMAD RENDRA TRIASMARA NIM 071910201015 PROGRAM STUDI STRATA-1 TEKNIK ELEKTRO JURUSAN TEKNIK
PERANCANGAN PROTOTYPE ROBOT SOUND TRACKER BERBASIS MIKROKONTROLER DENGAN METODE FUZZY LOGIC SKRIPSI Oleh MUHAMMAD RENDRA TRIASMARA NIM 071910201015 PROGRAM STUDI STRATA-1 TEKNIK ELEKTRO JURUSAN TEKNIK
Penerapan Metode Fuzzy Mamdani Pada Rem Otomatis Mobil Cerdas
 Penerapan Metode Fuzzy Mamdani Pada Rem Otomatis Mobil Cerdas Zulfikar Sembiring Jurusan Teknik Informatika, Fakultas Teknik, Universitas Medan Area [email protected] Abstrak Logika Fuzzy telah banyak
Penerapan Metode Fuzzy Mamdani Pada Rem Otomatis Mobil Cerdas Zulfikar Sembiring Jurusan Teknik Informatika, Fakultas Teknik, Universitas Medan Area [email protected] Abstrak Logika Fuzzy telah banyak
DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID BERBASIS PLC PADA SISTEM KONTROL LEVEL CAIRAN COUPLED-TANK
 TUGAS AKHIR TE091399 Teknik Sistem Pengaturan Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013 DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID
TUGAS AKHIR TE091399 Teknik Sistem Pengaturan Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013 DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID
Pengaturan Kecepatan Motor DC dengan Menggunakan Mikrokontroler Berbasis Fuzzy-PID
 Pengaturan Kecepatan Motor DC dengan Menggunakan Mikrokontroler Berbasis Fuzzy-PID Qory Hidayati 1 ), Mikail Eko Prasetyo 2) 1, 2) Jurusan Teknik Elektronika Politeknik Negeri Balikpapan, Jl. Soekarno
Pengaturan Kecepatan Motor DC dengan Menggunakan Mikrokontroler Berbasis Fuzzy-PID Qory Hidayati 1 ), Mikail Eko Prasetyo 2) 1, 2) Jurusan Teknik Elektronika Politeknik Negeri Balikpapan, Jl. Soekarno
MODUL 8 APLIKASI NEURAL NETWORK DAN FUZZY LOGIC PADA PERKIRAAN CUACA
 MODUL 8 APLIKASI NEURAL NETWORK DAN FUZZY LOGIC PADA PERKIRAAN CUACA Muhammad Ilham 10211078 Program Studi Fisika, Institut Teknologi Bandung, Indonesia Email: [email protected] Asisten:
MODUL 8 APLIKASI NEURAL NETWORK DAN FUZZY LOGIC PADA PERKIRAAN CUACA Muhammad Ilham 10211078 Program Studi Fisika, Institut Teknologi Bandung, Indonesia Email: [email protected] Asisten:
BAB I PENDAHULUAN. Kegiatan videografi saat ini sangat dituntut untuk dapat menghasilkan
 BAB I PENDAHULUAN 1.1 Latar Belakang Kegiatan videografi saat ini sangat dituntut untuk dapat menghasilkan gambar atau rekaman video yang rapi dan stabil. Namun untuk menghasilkan rekaman video yang stabil
BAB I PENDAHULUAN 1.1 Latar Belakang Kegiatan videografi saat ini sangat dituntut untuk dapat menghasilkan gambar atau rekaman video yang rapi dan stabil. Namun untuk menghasilkan rekaman video yang stabil
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1. AnalisaMasalah Dalam perancangan robot penyeimbang menggunakan sensor jarakberbasis android, terdapatbeberapa masalah yang harus dipecahkan. Permasalahan tersebut
BAB III ANALISA DAN PERANCANGAN III.1. AnalisaMasalah Dalam perancangan robot penyeimbang menggunakan sensor jarakberbasis android, terdapatbeberapa masalah yang harus dipecahkan. Permasalahan tersebut
SISTEM KENDALI JARAK JAUH MINIATUR TANK TANPA AWAK
 SISTEM KENDALI JARAK JAUH MINIATUR TANK TANPA AWAK OLEH : Eko Efendi (2211030009) Dio Adya Pratama (2211030036) Dosen Pembimbing : Suwito ST.,MT NIP. 19810105 200501 1004 Latar Belakang Meminimalisir prajurit
SISTEM KENDALI JARAK JAUH MINIATUR TANK TANPA AWAK OLEH : Eko Efendi (2211030009) Dio Adya Pratama (2211030036) Dosen Pembimbing : Suwito ST.,MT NIP. 19810105 200501 1004 Latar Belakang Meminimalisir prajurit
BAB 1 PENDAHULUAN. wahana terbang tanpa awak, teknologi tersebut disebut Unmanned Aerial Vehicle
 1.1. Latar Belakang Masalah BAB 1 PENDAHULUAN Seiring perkembangan teknologi telekomunikasi dan dirgantara menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokasi tertentu
1.1. Latar Belakang Masalah BAB 1 PENDAHULUAN Seiring perkembangan teknologi telekomunikasi dan dirgantara menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokasi tertentu
Perancangan Graphical User Interface untuk Pengendalian Suhu pada Stirred Tank Heater Berbasis Microsoft Visual Basic 6.0
 JURNAL ILMIAH ELITE ELEKTRO, VOL. 3, NO. 2, SEPTEMBER 2012: 89-95 89 Perancangan Graphical User Interface untuk Pengendalian Suhu pada Stirred Tank Heater Berbasis Microsoft Visual Basic 6.0 Muhammad Rozali
JURNAL ILMIAH ELITE ELEKTRO, VOL. 3, NO. 2, SEPTEMBER 2012: 89-95 89 Perancangan Graphical User Interface untuk Pengendalian Suhu pada Stirred Tank Heater Berbasis Microsoft Visual Basic 6.0 Muhammad Rozali
Kontrol Kecepatan Motor DC Berbasis Logika Fuzzy (DC Motor Speed Control Based on Fuzzy Logic)
") Terry Intan Nugroho., et al., Kontrol Kecepatan Motor DC Berbasis Logika 1 Kontrol Kecepatan Motor DC Berbasis Logika (DC Motor Speed Control Based on Logic) Terry Intan Nugroho, Bambang Sujanarko, Widyono
Terry Intan Nugroho., et al., Kontrol Kecepatan Motor DC Berbasis Logika 1 Kontrol Kecepatan Motor DC Berbasis Logika (DC Motor Speed Control Based on Logic) Terry Intan Nugroho, Bambang Sujanarko, Widyono
Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy
 ABSTRAK Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
ABSTRAK Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
SISTEM KENDALI GERAK SEGWAY BERBASIS MIKROKONTROLER
 Sistem Kendali Gerak Segway Berbasis Mikrokontroler Lukas B. Setyawan, Deddy Susilo, Dede Irawan SISTEM KENDALI GERAK SEGWAY BERBASIS MIKROKONTROLER Lukas B. Setyawan 1, Deddy Susilo 2, Dede Irawan 3 Program
Sistem Kendali Gerak Segway Berbasis Mikrokontroler Lukas B. Setyawan, Deddy Susilo, Dede Irawan SISTEM KENDALI GERAK SEGWAY BERBASIS MIKROKONTROLER Lukas B. Setyawan 1, Deddy Susilo 2, Dede Irawan 3 Program
Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid
 Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid Made Rahmawaty, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid Made Rahmawaty, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
PERANCANGAN ALAT PENGATUR TEMPERATUR AIR PADA SHOWER MENGGUNAKAN KONTROL SUKSESSIVE BERBASIS MIKROKONTROLER
 PERANCANGAN ALAT PENGATUR TEMPERATUR AIR PADA SHOWER MENGGUNAKAN KONTROL SUKSESSIVE BERBASIS MIKROKONTROLER Bagus Idhar Junaidi 2209039004 Yasinta Fajar Saputri 2209039014 Dosen Pembimbing Ir. Rusdhianto
PERANCANGAN ALAT PENGATUR TEMPERATUR AIR PADA SHOWER MENGGUNAKAN KONTROL SUKSESSIVE BERBASIS MIKROKONTROLER Bagus Idhar Junaidi 2209039004 Yasinta Fajar Saputri 2209039014 Dosen Pembimbing Ir. Rusdhianto
Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
 JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
Oleh : LUQMAN ERWANSYAH MOH AGUS SYAHRI ROMADHON Dosen Pembimbing Rachmad Setiawan, ST, MT
 Oleh : LUQMAN ERWANSYAH 2207030028 MOH AGUS SYAHRI ROMADHON 2207030030 Dosen Pembimbing Rachmad Setiawan, ST, MT Program Studi D3 Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
Oleh : LUQMAN ERWANSYAH 2207030028 MOH AGUS SYAHRI ROMADHON 2207030030 Dosen Pembimbing Rachmad Setiawan, ST, MT Program Studi D3 Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
DENIA FADILA RUSMAN
 Sidang Tugas Akhir INVENTORY CONTROL SYSTEM UNTUK MENENTUKAN ORDER QUANTITY DAN REORDER POINT BAHAN BAKU POKOK TRANSFORMER MENGGUNAKAN METODE FUZZY (STUDI KASUS : PT BAMBANG DJAJA SURABAYA) DENIA FADILA
Sidang Tugas Akhir INVENTORY CONTROL SYSTEM UNTUK MENENTUKAN ORDER QUANTITY DAN REORDER POINT BAHAN BAKU POKOK TRANSFORMER MENGGUNAKAN METODE FUZZY (STUDI KASUS : PT BAMBANG DJAJA SURABAYA) DENIA FADILA
ROBOT BECAK BERBASIS MIKROKONTROLER ATMEGA 8535 DENGAN LOGIKA FUZZY
 ROBOT BECAK BERBASIS MIKROKONTROLER ATMEGA 8535 DENGAN LOGIKA FUZZY Disusun Oleh : Suep Rizal Dosen Pembimbing I : Basuki Rahmat, S.Si, MT Dosen Pembimbing II : Fetty Tri Anggraeny, S.Kom Abstraksi Robot
ROBOT BECAK BERBASIS MIKROKONTROLER ATMEGA 8535 DENGAN LOGIKA FUZZY Disusun Oleh : Suep Rizal Dosen Pembimbing I : Basuki Rahmat, S.Si, MT Dosen Pembimbing II : Fetty Tri Anggraeny, S.Kom Abstraksi Robot
: Sistem Pendukung Keputusan, Siswa berprestasi, Tsukamoto
 SISTEM PENDUKUNG KEPUTUSAN PEMILIHAN SISWA BERPRESTASI BERBASIS WEB DENGAN METODE TSUKAMOTO PADA SMA INSTITUT INDONESIA Eko Purwanto Program Studi Teknik Informatika, Fakultas Ilmu Komputer Universitas
SISTEM PENDUKUNG KEPUTUSAN PEMILIHAN SISWA BERPRESTASI BERBASIS WEB DENGAN METODE TSUKAMOTO PADA SMA INSTITUT INDONESIA Eko Purwanto Program Studi Teknik Informatika, Fakultas Ilmu Komputer Universitas
BAB II SISTEM KENDALI GERAK SEGWAY
 BAB II SISTEM KENDALI GERAK SEGWAY Sistem merupakan suatu rangkaian beberapa organ yang menjadi satu kesatuan. Maka sistem kendali gerak adalah suatu sistem yang terdiri dari beberapa komponen pengendali
BAB II SISTEM KENDALI GERAK SEGWAY Sistem merupakan suatu rangkaian beberapa organ yang menjadi satu kesatuan. Maka sistem kendali gerak adalah suatu sistem yang terdiri dari beberapa komponen pengendali
IMPLEMENTASI ROBOT THREE OMNI-DIRECTIONAL MENGGUNAKAN KONTROLER PID PADA ROBOT KONTES ROBOT ABU INDONESIA (KRAI)
") IMPLEMENTASI ROBOT THREE OMNI-DIRECTIONAL MENGGUNAKAN KONTROLER PID PADA ROBOT KONTES ROBOT ABU INDONESIA (KRAI) Publikasi Jurnal Skripsi Disusun Oleh : RADITYA ARTHA ROCHMANTO NIM : 916317-63 KEMENTERIAN
IMPLEMENTASI ROBOT THREE OMNI-DIRECTIONAL MENGGUNAKAN KONTROLER PID PADA ROBOT KONTES ROBOT ABU INDONESIA (KRAI) Publikasi Jurnal Skripsi Disusun Oleh : RADITYA ARTHA ROCHMANTO NIM : 916317-63 KEMENTERIAN
SISTEM PERINGATAN JARAK PADA KENDARAAN DENGAN FUZZY LOGIC BERBASIS MIKRO KONTROLLER
 SISTEM PERINGATAN JARAK PADA KENDARAAN DENGAN FUZZY LOGIC BERBASIS MIKRO KONTROLLER TUGAS AKHIR OLEH : Bonaventura Agung Pribadi 03.50.0012 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS
SISTEM PERINGATAN JARAK PADA KENDARAAN DENGAN FUZZY LOGIC BERBASIS MIKRO KONTROLLER TUGAS AKHIR OLEH : Bonaventura Agung Pribadi 03.50.0012 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS
BALANCING ROBOT BERBASIS FUZZY LOGIC Sumantri K Risandriya, ST, MT (1), Rifqi Amalya Fatekha, S.ST (2), Irda Zusmaniar (3)
, Rifqi Amalya Fatekha, S.ST (2), Irda Zusmaniar (3)") BALANCING ROBOT BERBASIS FUZZY LOGIC Sumantri K Risandriya, ST, MT (1), Rifqi Amalya Fatekha, S.ST (2), Irda Zusmaniar (3) Mechatronics Engineering, Batam Polytechnics Parkway Street, Batam Centre, Batam
BALANCING ROBOT BERBASIS FUZZY LOGIC Sumantri K Risandriya, ST, MT (1), Rifqi Amalya Fatekha, S.ST (2), Irda Zusmaniar (3) Mechatronics Engineering, Batam Polytechnics Parkway Street, Batam Centre, Batam
BAB I PENDAHULUAN 1.1 Latar Belakang
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi pesawat tanpa awak (english : Unmanned Aerial Vehicle disingkat UAV) sangat pesat. Diperkirakan UAV akan berkembang secara signifikan pada
1 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi pesawat tanpa awak (english : Unmanned Aerial Vehicle disingkat UAV) sangat pesat. Diperkirakan UAV akan berkembang secara signifikan pada
BAB 1 PENDAHULUAN. Logika fuzzy memberikan solusi praktis dan ekonomis untuk mengendalikan
 BAB 1 PENDAHULUAN 1.1. Latar Belakang Logika fuzzy memberikan solusi praktis dan ekonomis untuk mengendalikan sistem yang kompleks. Logika fuzzy memberikan rangka kerja yang kuat dalam memecahkan masalah
BAB 1 PENDAHULUAN 1.1. Latar Belakang Logika fuzzy memberikan solusi praktis dan ekonomis untuk mengendalikan sistem yang kompleks. Logika fuzzy memberikan rangka kerja yang kuat dalam memecahkan masalah
BAB I PENDAHULUAN. Robot dapat didefenisikan sebagai mesin yang terlihat seperti manusia dan
 BAB I PENDAHULUAN 1.1 Latar belakang Dalam pemenuhan kebutuhan saat sekarang ini, manusia senantiasa dituntut untuk melakukan inovasi untuk menghasilkan sebuah teknologi yang bisa memudahkan dalam pemenuhan
BAB I PENDAHULUAN 1.1 Latar belakang Dalam pemenuhan kebutuhan saat sekarang ini, manusia senantiasa dituntut untuk melakukan inovasi untuk menghasilkan sebuah teknologi yang bisa memudahkan dalam pemenuhan
RANCANG BANGUN SIMULATOR PENGENDALIAN POSISI CANNON PADA MODEL TANK MILITER DENGAN PENGENDALI PD (PROPOSIONAL DERIVATIVE)
") Makalah Seminar Tugas Akhir RANCANG BANGUN SIMULATOR PENGENDALIAN POSISI CANNON PADA MODEL TANK MILITER DENGAN PENGENDALI PD (PROPOSIONAL DERIVATIVE) Heru Triwibowo [1], Iwan Setiawan [2], Budi Setiyono
Makalah Seminar Tugas Akhir RANCANG BANGUN SIMULATOR PENGENDALIAN POSISI CANNON PADA MODEL TANK MILITER DENGAN PENGENDALI PD (PROPOSIONAL DERIVATIVE) Heru Triwibowo [1], Iwan Setiawan [2], Budi Setiyono
Rancang Bangun Robot Vacuum Cleaner Berbasis Mikrokontroler
 Seminar Nasional Teknologi Informasi dan Komunikasi Terapan (SEMANTIK) 2015 269 Rancang Bangun Robot Vacuum Cleaner Berbasis Mikrokontroler Afwan Zikri *), Anton Hidayat **), Derisma ***) * *** Sistem
Seminar Nasional Teknologi Informasi dan Komunikasi Terapan (SEMANTIK) 2015 269 Rancang Bangun Robot Vacuum Cleaner Berbasis Mikrokontroler Afwan Zikri *), Anton Hidayat **), Derisma ***) * *** Sistem
Analisis Pengaruh Pemilihan Fuzzy Membership Function Terhadap Output Sebuah Sistem Fuzzy Logic
 Analisis Pengaruh Pemilihan Fuzzy Membership Function Terhadap Output Sebuah Sistem Fuzzy Logic Luh Kesuma Wardhani, Elin Haerani Jurusan Teknik Informatika Fakultas Sains dan Teknologi UIN SUSKA Riau
Analisis Pengaruh Pemilihan Fuzzy Membership Function Terhadap Output Sebuah Sistem Fuzzy Logic Luh Kesuma Wardhani, Elin Haerani Jurusan Teknik Informatika Fakultas Sains dan Teknologi UIN SUSKA Riau
Bab III Perancangan Sistem
 Bab III Perancangan Sistem Dalam perancangan sistem kendali motor DC ini, terlebih dahulu dilakukan analisis bagian-bagian apa saja yang diperlukan baik hardware maupun software kemudian dirancang bagian-perbagian,
Bab III Perancangan Sistem Dalam perancangan sistem kendali motor DC ini, terlebih dahulu dilakukan analisis bagian-bagian apa saja yang diperlukan baik hardware maupun software kemudian dirancang bagian-perbagian,