ANALISA RESPON DINAMIK SPRUNG MASS TERHADAP SUDUT KEMIRINGAN SUSPENSI PADA KENDARAAN RODA EMPAT
|
|
|
- Budi Muljana
- 7 tahun lalu
- Tontonan:
Transkripsi
1 ANALISA RESPON DINAMIK SPRUNG MASS TERHADAP SUDUT KEMIRINGAN SUSPENSI PADA KENDARAAN RODA EMPAT Oleh : Ir. Resep Sembiring. MT Sekolah Tinggi Teknologi Immanuel Medan ABSTRAK Kenyamanan berkendaraan sudah menjadi tuntutan bagi para pengendara, sejalan dengan itu penelitian tentang kenyamanan berkendaraan serta gangguannya banyak dilakukan kondisi yang ingin dicapai dalam kenyamanan adalah kemampuan pengendara untuk menahan getaran selama mungkin. Hal ini sulit dicapai sehingga ditempuh dengan meminimumkan efek gangguan ketidak rataan jalan dengan memasang system suspensi diantara roda dan badan kendaraan. Hasilnya masih belum sesuai dengan yang diharapkan sehingga berbagai macam penelitian dilakukan, salah satu pada kesempatan ini adalah dengan memiringkan pemasangan suspensi. Pengaruh sudut pemasangan suspensi terhadap kenyamanan dan stabilitas kendaraan diharapkan signifikan. Pemodelan matematika setengah kendaraan dengan empat derajat kebebasan disimulasikan untuk menganalisa effek sudut kemiringan suspensi terhadap sprung mass. Respon dinamik yang dianalisa adalah perpindahan,kecepatan dan percepatan sprung massa kendaraan. Untuk simulasi digunakan software MATLAB Ra2008 versi 7.6 dengan input ketidakrataan jalan atau sinusoidal. Sudut pemasangan suspensi diambil 85, 75, 70, 65, 60, 55 dan 50 derajat pada kecepatan kendaraan 50,40 dan 30 km/h. Hasil analisa menunjukkan bahwa pada kecepatan 50 km/jam dinyatakan pada kondisi sedikit tidak nyaman untuk semua sudut yang diuji, pada kecepatan 40 km/jam nyaman pada sudut 60 sampai 75 drajat sedangkan pada kecepatan 30 km/jam nyaman pada sudut 50 sampai 85 drajat dan sudut kemiringan yang nyaman pada kecepatan 50, 40, dan 30 km/jam adalah 70 drajat dengan gangguan jalan yang sinusoidal amplitudo 0,05 m, panjang gelombang 5 m. Kata kunci : Sprung mass, Unsprung mass Getaran, Kemiringan suspensi 139
2 I. PENDAHULUAN 1.1. Latar Belakang Kendaraan merupakan alat transportasi yang dewasa ini semakin dibutuhkan untuk menjawab tantangan kesibukan dalam memanfaatkan waktu seefisien mungkin. Oleh karena itu dibutuhkan kendaraan yang nyaman untuk dikendarai. Salah satu komponen yang berpengaruh terhadap kenyamanan berkendaraan adalah sistim suspensi kendaraan. Kendaraan yang memiliki tingkat kenyamanan dan kesetabilan yang tinggi akan menjadi nilai yang tersendiri pada kendaraan dan bagi pengendaranya. Getaran akibat jalan yang tidak rata menyebabakan guncangan pada kendaraan sehingga menyebabkan ketidak nyamanan. I.2. Identifikasi Masalah Dari uraian diatas dapat disimpulkan bahwa getaran pada kendaraan merupakan penyebab utama ketidak stabilan kendaraan pada saat melintas diajalan yang tidak rata (sinusoidal). Getaran merupakan perpindahan energy dari roda ke sprung mass yang menyebabkan sprung mass begetar dan tidak nyaman. Oleh sebab itu energi tersebut direduksi dengan pemasangan suspensi antara unsprung mass dengan sprung mass. I.3 Rumusan Masalah Dari uraian diatas penulis merumuskan masalah sebagai berikut: 1. Berapakah sudut kemiringan suspensi yang nyaman untuk kecepatan kendaraan 50, 40 dan 30 km/h dengan amplitudo 0,05 m, panjang gelombanga 5 m. 2 Berapakah besar sudut kemiringan suspensi yang paling efektif untuk meredam getaran yang ditimbulkan oleh jalan yang tidak rata I.4 Tujuan Penelitian Analisa ini dilakukan dengan tujuan untuk mengetahui: Untuk mengetahui sudut kemiringan suspensi yang nyaman pada sprung mass pada kecepatan kendaraan 50, 40 dan 30 km/h dengan amplitudo jalan 0,05 m dan panjang gelombang jalan 5 m. I.5 Manfaat Penelitian faat Dari hasil penelitian tesis ini diharapkan akan mempunyai manfaat yaitu 1. Sebagai informasi ke masyarakat dan dunia teknologi tentang pengaruh sudut kemiringan pemasangan suspensi pada kendaraan roda empat. 2. Sebagai pertimbangan dan pembanding bagi perkembangan suspensi otomotif Indonesia dimasa mendatang. 140
3 3. Sebagai bahan masukan untuk pengembangan materi praktek dan teori pembelajaran. I.6 Parameter Penelitian dan Variabel Bebas Sebagai parameter dalam penelitian ini adalah : Tabel 1.1 Parameter penelitian dan Variabel penelitian Varibel bebas Sudut pemasangan suspensi terhadap lateral 85 o, 80 o, 75 o, 70 o, 65 o 60 o, 55 o dan 50 o Kecepatan kendaraan 30 km/jam, 40 km/jam, 50 km/jam Parameter yang di ukur Amplitudo respon displacement, kecepatan dan perpecatan badan kenderaan (sprung mass) I.7 Batasan dan Lingkup Penelitian 1. Penelitian ini dibatasi hanya membahas respon dinamik percepatan gerak vertical dan lateral sprung mass. 2. Dalam penelitian ini tidak ditentukan jenis kendaraan sebagai objek tetapi hanya berdasarkan spesifikasi suspensi yang ditabelkan berikut. Batasan spesifikasi suspensi kendaraan ditabelkan seperti Tabel 1.2 berikut ini. Tabel 1.2 Batasan Penelitian suspensi kendaraan No Parametr Nilai Param eter 1 MB 7161 N Nilai Bf 1290 Ns/m Br JB N m 2 Ns/m 3 Mf 392 N Ktf,Ktr Ns/m 4 Mr 353 N Lf 1.8 m 5 Kf Lr 1 m N/m 6 Kr N/m 3. Nilai konstanta K dan C diasumsikan linier untuk semua interval perpindahan kecepatan dan percepatan 4. Gangguan hanya berasal dari ketidak rataan jalan. II. STUDI LITERATUR 2.1 Sudut Kemiringan Suspensi Menurut ketentuan yang dianjurkan oleh Society of Automotive Engineering ( SAE ) bahwa untuk kenyamanan, percepatan getaran ke vertikal dibawah 0,315 m/s 2 sedangkan percepatan getaran ke lateral dibawah 0,2 m/s 2. Dengan adanya batasan-batasan diatas tidak tertutup kemungkinan untuk mengurangi percepatan getaran ke vertikal dengan memiringkan pemasangan suspensi. Hubungan antara sudut kemiringan dan kenyamanan hanya sebatas percepatan getaran lateral 141

 = massa sprung mass () (kg) Mr, Mf = unsprung mass belakang dan depan (kg) Kr, Kf =koefisien kekakuan pegas belakang dan depan (N/m) Br, Bf =koefisien kekakuan peredam")
4 Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017 yang dianjurkan yaitu dibawah 0,2 m/s 2. Gambar 2.5 Diagram perubahan respon dinamik terhadap sudut kemiringan suspense 2.2 Pemodelan Sistim Suspensi Pasif Sistim suspensi passif terdiri dari komponen pegas dan komponen peredam Sistim suspensi kendaraan setengah dapat direpresentasikan seperti gambar berikut: Gambar 2,6 Suspensi passif setengah kendaraan Dengan: Zb =perpindahan sprung mass () (m) Zr =perpindahan sprung mass belakang (Mr) (m) Zf =perpindahan sprung mass depan (Mf) (m) Z r, Z f=perpindahan unsprung mass belakang dan depan (m) = massa sprung mass () (kg) Mr, Mf = unsprung mass belakang dan depan (kg) Kr, Kf =koefisien kekakuan pegas belakang dan depan (N/m) Br, Bf =koefisien kekakuan peredam belakang dan depan (Ns/m) Wr,Wf =gangguan pada roda belakang dan depan lf,lr =jarak CG terhadap suspensi depan dan belakang (m) b = pitch angle kendaraan = momen inersia bodi kendaraan(kg.m 2 ) 2.3 Persamaan Gerak Suspensi Pasif Persamaan gerak badan kendaraan (sprung mass) Z b = (Kr + Kf)zb (Br + Bf)z b Br. z mr + + (Kf.lf Kr. lr) (Bf.lf Br. lr) Kf. zmf Bf. z mf Kr.zmr 2.1 Persamaan momen inersia sprung mass b = (Bf.lf Br.lr)z b (Bf.lf)z mf + ((Bf.(lf)2 + Br.(lr) 2 )) + (Br.lr)zmr (Kf.lf Kr.lr)zb (Kf. lf)zmf + (Kr.lr)Zmr + ((Kf(lf)2 +Kr(lr) 2 )) 2.2 Persamaan gerak badan kendaraan unsprung mass bagian depan Zf = - (Bf)zb (Bf.lf) (Kf.lf) Mf + Mf Mf (Ktf+ Kf)zmf Mf - Ktf.wf Mf + (Bf)z mf Mf - (Kf)zb Mf + 142
 Mr + (Br.lr) Mr + (Kr+Ktr)zmr Mr + (Br)z mr - Mr Ktr wr Mr 2.")
 x4= z r, Kec.")
 x8= zr Perpindahan unsprung mass (belakang) Dari")
 Matrik")
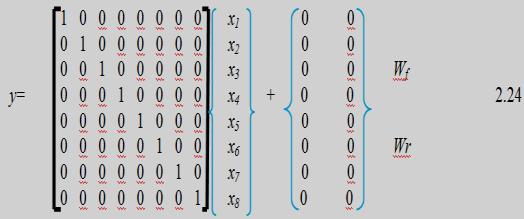
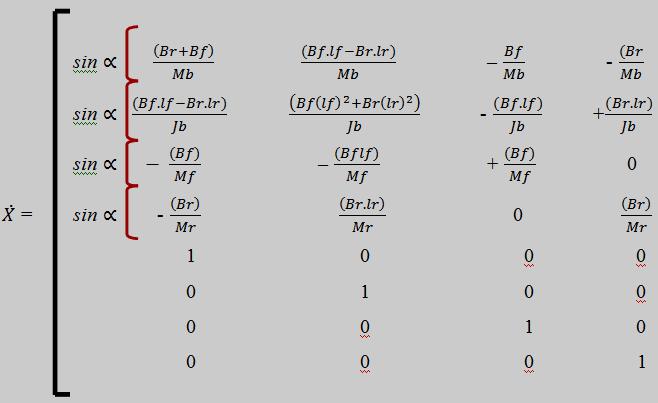
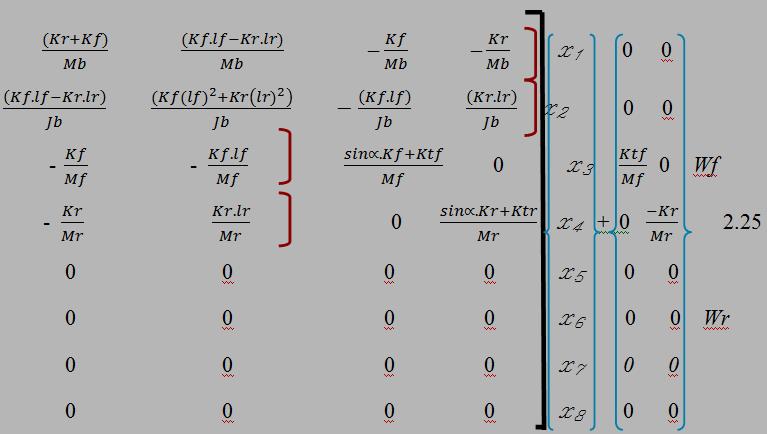
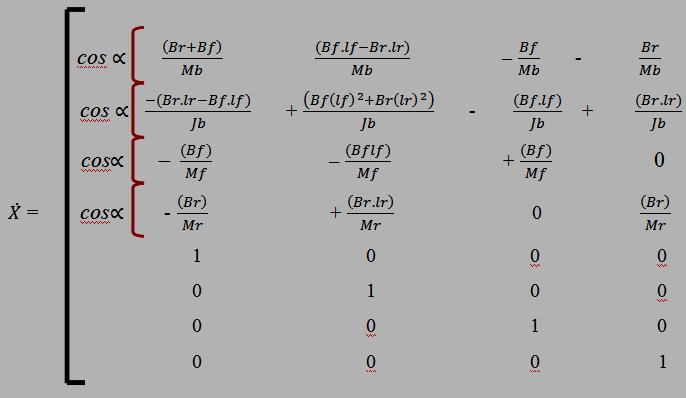
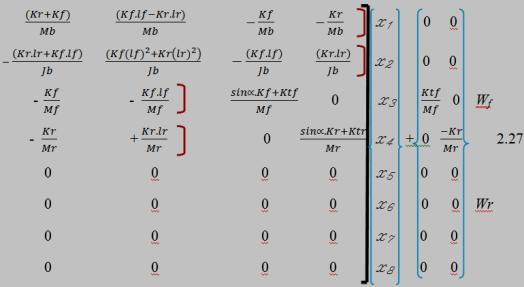
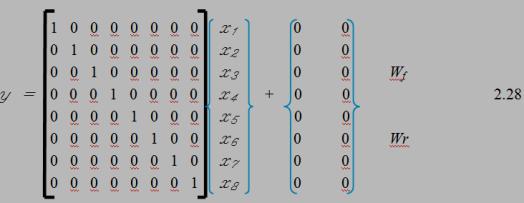
5 2.3 Persamaan gerak badan kendaraan unsprung mass bagian belakang Z r = - (Br)zb (Kr)zb Mr Mr + (Kr.lr) Mr + (Br.lr) Mr + (Kr+Ktr)zmr Mr + (Br)z mr - Mr Ktr wr Mr 2.4Dengan memilih variable keadaan sebagai berikut; x1= z b, Kecepatan sprung mass x2=,kec. Sudut x3= z f,kec.unsprung mass (depan) x4= z r, Kec. Unsprung mass (belakang) x5= zb, Perpindahan sprung mass x6=,sudut momen x7= zf,perpindahan unsprung mass (depan) x8= zr Perpindahan unsprung mass (belakang) Dari persamaan 2.1, 2.2, 2.3, dan 2.4 diatas dapat dituliskan sebagai berikut: Matrik gangguan system (matrik B) Matrik keluaran system (matrik C) Matrik keadaan sistim (matrik A) Matrik transmisi langsung (matrik D) 2.5. Persamaan State Space Sistem 143

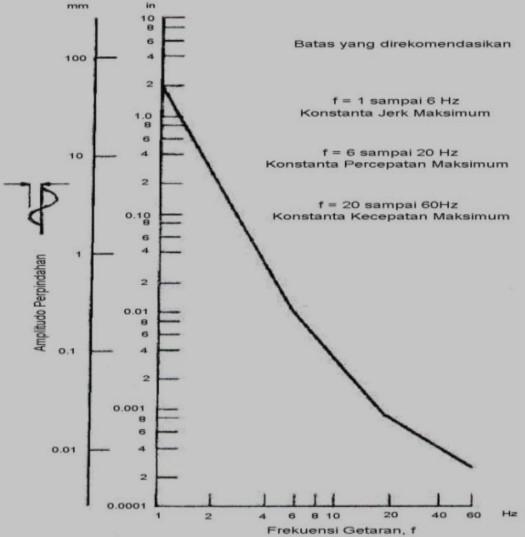
6 2.6.2 Horizontal Vertikal 2.7 Kriteria Kenyamanan Kendaraan A. Keriteria Kenyamanan Janeway Gambar 2.11 Batas getaran vertical kereteria Janeway 144

7 Kenyamanan penumpang pada kendaraan darat telah dirumuskan oleh Jane way yang berdasarkan kenyamanan penumpang ini pada hubungan laju kecepatan, percepatan terhadap amplitudo dan frekuensi getar yang terjadi. Pada umumnya tingkat kenyamanan tersebut didasarkan pada tiga level frekuensi yaitu masing-masing pada frekuensi level pertama pada 1 6 Hz, kedua pada frekuensi 6 20 Hz dan level ketiga pada frekuensi Hz. Untuk level frekuensi 1 6 Hz harga maksimum dari atau besarnya percepatan getaran persatuan waktu tidak boleh melebihi 12,6 m/dt 3 atau sebesar 496 inci/dt 3 besarnya amplitudo maksimum adalah: A1 = 12,6 m dt 3 = ω 3 rad dt 3 12,6 m dt 3 (2.3,14) 3 rad dt 3 = 0,0508 m Untuk level 2 mulai frekuensi 6 20 Hz besarnya percepatan maksimum yang diijinkan pada batas nyaman adalah: 0,33 m/dt2, maka amplitudo maksimum yang diturunkan dari hubungan ini adalah: A2= 0,33 m dt 2 ω 2 rad dt 2 = 0,33 m dt 2 (2.3,14) 2 rad dt 2 = 0,008 m Untuk level frekuensi Hz, besarnya amplitudo maksimum yang diijinkan didasarkan pada kecepatan maksimum yang diijinkan yaitu sebesar 2,7 m/dt atau sekitar 0,105 in/dt, maka besar amplitudo maksimum yang diijinkan adalah: A3 = 2,7 m 2,7 m dt dt = = 0,48 m ω rad 2.3,14 rad dt dt B. Keriteria Kenyamanan getaran vertical menurut ISO Tabel 2.1 Keriteria kenyamanan getaran vertikal menurut ISO 2631,1974 No Getaran Keterangan (percepatan) 1 >0,315 m/s 2 Tidak ada keluhan 2 0,315m/s 2 s/d 0,63m/s 2 Sedikit tidak nyaman 3 0,5 m/s 2 s/d 1 m/s 2 Agak tidak nyaman 4 0,8 m/s 2 s/d 1,6 m/s 2 Tidak nyaman 5 1,25 m/ 2 s/d 2,5 m/s 2 Sangat tidak nyaman 6 >2,5 m/s 2 Amat sangat tidak nyaman C. Keriteria kenyamanan getaran lateral menurut ISO Gambar 2.12 Standard getaran lateral ISO Perumusan Profil Permukaan Jalan Profil permukaan jalan diasumsikan sebagai gerak harmonic dengan karakteristik sebagai berikut: Wf(t) = A1 sin ωt 2.29 Wr(t) = A2 sin (ωt φ) 2.30 dengan: 145

8 wf(t) = profil permukaan jalan pada roda depan wr(t) = profil permukaan jalan pada roda belakang ω = frekuensi profil jalan = 2лv λ A = amplitudo profil permukaan jalan φ = beda fase antara roda depan dengan roda belakang = 2лL λ λ = panjang gelombang profil jalan V = kecepatan kendaraan Perbedaan waktu yang diberikan untuk ban depan dan belakang sebesar td, dengan td = lf lr V Dalam penelitian ini diasumsikan : l = 2,8 m lf = 1,8 m, lr = 1 m (dari titik CG) A= 0,05 m λ= 5 m Karena kondisi jalan merupakan fungi sinusoidal dengan panjang gelombang L m per siklus dan kecepatan kendaraan adalah v km/h maka frekwensi eksitasinya adalah : f = atau ω = 2л v 3600.L v L Hz rad/s Sistematika Penelit IV. Analisis Data Hasil Penelitian 4.1 Analisa Data Analisa data dilakukan pada sistem suspensi pasif, dengan memvariasikan posisi atau sudut pemasangan suspensi Grafik Hasil Simulasi Pengujian Getaran Vertikal III.METODOLOGI PENELITIAN 3.1 Metode Penelitian Metode yang dipilih dalam penelitian ini agar memperoleh hasil yang maksimum adalah metode simulasi computer dengan menggunakan prangkat lunak MATLAB Ra2008 versi






9 Jurnal Ilmiah Research Sains VOL. 3. NO. 1 Februari 2017 Pengujian getaran Lateral 147



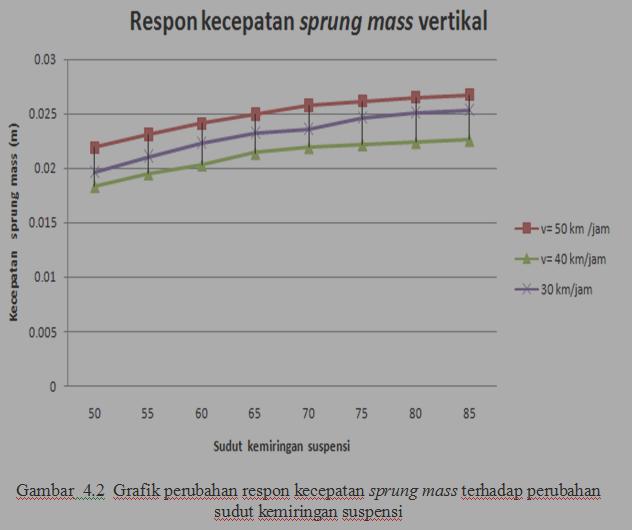
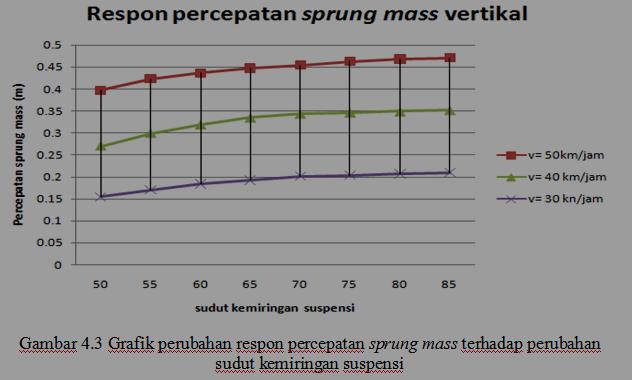
10 Grafik 4.1 adalah grafik amplitudo sprung mass vs sudut kemiringan suspensi dimana pada grafik tersebut dapat diketahui bahwa amplitudo getaran secara vertikal mengalami peningkatan dengan meningkatnya sudut kemiringan suspensi, sedangkan amplitudo getaran secara horizontal mengalami penurunan, seperti yang ditunjukkan pada grafik 4.4. Demikian juga grafik 4.2, grafik kecepatan sprung mass vs sudut krmiringan suspensi yang menunjukkan bahwa kecepatan sprung mass secara vertical juga mengalami peningkatan seiring dengan meningkatnya sudut kemiringan suspensi dan sebaliknya mengalami penurunan seiring dengan menurunnya sudut kemringan suspensi dan hal tersebut ditunjukkan pada grafik 4.5. Demikian juga dengan grafik 4.3 adalah grafik respon dinamik percepatan sprung mass vs sudut kemiringan suspensi, dimana percepatan sprung mass kearah vertikal juga mengalami prningkatan seiring dengan meningkatnya sudut kemiringan suspensi dan sebaliknya mengalami penurunan seiring dengan menurunnya sudut kemiringan suspensi dan ditunjukkan pada grafik 4.6. Dari uraian diatas amplitudo, kecepatan dan percepatan sprung mass mengalami penurunan dengan menurunnya sudut pemasangan suspensi dan sebaliknya meningkat dengan meningkatnya sudut pemasangan suspensi. Dari grafik 4.1, 4.2, 4.3, 4.4, 4,5 dan 4.6 respon dinamik sprung mass berubah secara non linier dan antara respon dinamik vertikal dengan respon dinamik horizontal terjadi kontradiksi atau berbanding terbalik. Dari grafik 4.4, 4.5 dan 4.6 adalah grafik respon dinamik sprung mass kearah horizontal dimana amplitudo, kecepatan dan percepatan sprung mass mengalami penurunan dengan meningkatnya sudut pemasangan suspensi dan sebaliknya 148
11 akan meningkat dengan menurunnya sudut pemasangan suspensi. Meningkatnya respon dinamik kearah horizontal berarti menurunnya respon dinamik kearah vertical dan sebaliknya meningkatnya respon dinamik kearah vertical berarti menurunnya respon dinamik kearah horizontal. Meningkatnya respon dinamik khususnya amplitudo kearah horizontal yang berarti defleksi suspensi kearah vartikal menurun dan jika hal ini sampai pada titik tertentu dimana defleksi suspensi vertikal lebih kecil dari defleksi suspensi horizontal berakibat terjadinya benturan pada sprung mass (tidak nyaman). 4.3 Analisa Kenyamanan 4.3.1Analisa respon dinamik sprung massa mengacu keriteria Janeway Dengan mengasumsikan permukaan jalan merupakan fungsi sinusoidal seperti diuraikan pada bab 2, maka dengan persamaan 2.31 dapat dihitung bahwa untuk kecepatan 30 km/jam panjang gelombanga 5 m maka frekwensinya adalah: f = V hz = 30 hz = 1,666 hz λ.3,6 5(3,6) Maka amplitudo ijin dari kriteria Janeway dengan persamaan 2.32 adalah: A= 12,6 12,6 ω3 (meter)= meter = (2л.1,666) 3 0,011 m Sedangkan untuk kecpatan 40 km/jam frekwensi (f) adalah; f = V hz = 40 hz=2,222 hz λ(3,6) 5(3,6) dan amplitudo ijin dari criteria Janeway adalah: A = 12,6 ω 3 m = 12,6 (2л.2,222) 3=0,00437 m Demikian juga untuk kecepatan 50 km/jam frekwensi(f) adalah: f = 2,777 haz dan amplitudo ijin dari kriteria Janeway adalah; A=0, m Dari hitungan diatas dapat dipastikan bahwa kecepatan kendaraan 30, 40 dan 50 km/jam berada pada level frekwensi 1 6 hz menurut keriteria Janeway (batasan waktu bagi tubuh manusia tahan,aman terhadap kesehatan akibat getaran). amplitudo maksimum pada setiap sudut kemiringan suspensi masih dibawah ijin kriteria Janeway. Berarti knyamanan dan stabilitas kendaraan baik pada kecepatan 30, 40 dan 50 km/jam berbasis amplitudo Analisa respon dinamik sprung mass dengan ketentuan ISO 2631 Mengacu kepada ketentuan ISO (International Standard Organization ) bahwa kenyamanan getaran vertical sprung mass berada pada percepatan 149
12 maksimum < 0,315 dt2 (tabel 2.1) dan kenyamanan getaran lateral sprung mass berada pada percepatan maksimum < 0,2 m dt m 2 (grafik 2.2). Dengan demikian dari grafik perepatan vertical dan lateral sprung mass (grafik 4.3 dan 4.6) diketahui bahwa pada kecepatan 50 km/jam tidak pada kondisi nyaman (sedikit tidak nyaman) untuk setiap sudut, sedangkan untuk kecepatan 40 km/jam nyaman pada sudut kemiringan suspensi ( 60 sampai 75 ) deg. Pada kecepatan kendaraan 30 km/jam nyaman pada sudut kemiringan suspensi 50 sampai 85 ) deg. Dari analisa diatas diproleh sudut-sudut kemiringan suspensi efektif menurut standart ISO.Sudutsudut tersebut adalah: Pada kecepatan 50 km/jam kondisi sedikit tidak nyaman Pada kecepatan 40 km/jam nyaman pada sudut 60 sampai 75 deg Pada kecepatan 30 km/jam nyaman pada sudut 50 sampai 85 deg Penentuan sudut yang paling efektif Sudut paling efektif yang dimaksutkan adalah sudut kemiringan suspensi yang nyaman pada kecepatan 50, 40 dan 30 km/jam. Pada kecepatan 50 km/jam dengan sudut kemiringan 70 deg sampai 85 deg masih pada kondisi sedikit tidak nyaman. Dengan demikian maka sudut kemiringan suspensi yang paling efektif adalah 70 deg. V. Kesimpulan dan Saran 1. Kesimpulan Dari uraian demi uraian dan pembahasan diatas maka dapat disimpulkan bahwa: 1. Dari analisa yang telah dilakukan diatas pada kondidsi jalan sinusoidal dengan amplitudo 0,05 m, panjang gelombang 5 m dan veriasi sudut kemiringan suspensi dari 50 deg sampai 85 deg dengan interval 5 deg pada kecepatan 30, 40 dan 50 km/jam diproleh sudut kemiringan suspensi sebagai beikut: Mengacu kepada ketentuan Janeway kecepatan 50, 40 dan 30 km/jam berada pada level frekwensi 1 6 Hz dan pada kecepatan 30 dan 40 km/jam dinyatakan nyaman sedangkan pada kecepatan 50 km/jam dinyatakan sedikit tidak nyaman. Menurut ISO sudut kemirimgan suspensi yang nyaman adalah: Pada kecepatan 50 km/jam dinyatakan pada kondisi sedikit tidak nyaman untuk semua sudut kemiringan suspensi yang di uji. Pada kecepatan 40 km/jam dinyatakan pada kodisi nyaman pada sudut kemiringan suspensi 60 sampai 75 deg 150
13 Pada kecepatan kendaraan 30 km/jam dinyatakan pada kondisi nyaman untuk sudut kemiringan suspensi 50 sampai 85 deg 2. Sudut kemiringan suspensi yang efektif untuk kecepatan 50, 40 dan 30 km/jam berada pada sudut 70 deg 3. Perubahan respon dinamik sprung mass akibat perubahan sudut pemasangan terjadi secara non linier. 4. Respon dinamik vertical dangam respon dinamik horizontal berbanding terbalik. 2. Saran 1. Agar mendapatkan hasil yang lebih mendekati sebenarnya hendaknya dilakukan dengan menggunakan model kendaraan penuh sehingga pengaruh gerakan horisontal dan lateral dapat dianalisa dengan lebih komplit. 2. Sebaiknya ditentukan jenis kendaraan yang dianalisa agar dapat diaplikasikan dengan nyata. DAFTAR PUSTAKA [1] Darus,Rosheila Modelling and Control of Active Suspensions for a Full Car Model. Malaysia Universitas Teknologi Malaysia [2] Stone, Richard dan Ball, J.K Automotive Engineering Fundamentals.Warrendale SAE. [3] Thomas D. Gillespie, Fundamentals of Vehicle Dynamics, Society of Automotive Engineers, Inc [4] Sutantra, Nyoman I, Teknologi Otomotif Teori dan Aplikasinya, Edisi Pertama, Penerbit Guna Widya, Surabaya [5] Ramses Y. Hutahaean, Getaran Mekanik, dilengkapi pemrograman dan simulasi dengan Matlab, Penerbit ANDI Yogyakarta [6] Hutahaean, Ramses, Mekanisme dan Dinamika Mesin, Edisi revisi,penerbit Andi,Yogyakarta, 2001 [7]. http: / /paparisa. unpatti. ac. id. Analisa Respon Dinamik Sepeda Motor Terhadap Posisi Sudut Suspensi. Diaskes pada tanggal 3 November [8]. Jazar, Reza N.. (2008). Vehicle Dynamic Theory and Application. New York:Springer [9] SS Mechanical Vibration Fifth Edition. Miami : pearson Education 151
14 [10]. Hasri Sistem Suspensi. (Online), (http: // hasri2jujur rotomotif. blogspot.com/2014/03/ /siste suspensi.html), diakses 4 Februari 2014 [11]. Arhami Muhammad, Desiani Anita. (2005 ) Pemrograman MATLAB. Yogyakarta: Andi. [12]. Modeling Simulation of Dinamic System, Robert L. Wood & Kent L. Lawrence, University of Texas at Arlington, Prentice Hall, Upper Saddle River,NJ [13]. Corriga, G., Sanna, S. & Usai, G., An Optimal Tandem Active-Passive Suspension Systems for Road Vehicles with Minimum Power Consumption, IEEE Transactions on Industrial Electronics, Vol. 38, No. 3 (June 1991). [14]. Campos, J, David, F, Lewis, S, Ikenaga, S, Scully, Enans, M., Active Suspension Control of Ground Vehicle Heave and Pitch Motion. Automation And Robotics Research Institute, The University of Texas at Arlington
ANALISA SISTEM SUSPENSI KENDARAAN MULTIGUNA PEDESAAN (GEA)
") 1 ANALISA SISTEM SUSPENSI KENDARAAN MULTIGUNA PEDESAAN (GEA) Amirul Huda dan Unggul Wasiwitono,ST.,M.Eng.Sc,Dr.Eng Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
1 ANALISA SISTEM SUSPENSI KENDARAAN MULTIGUNA PEDESAAN (GEA) Amirul Huda dan Unggul Wasiwitono,ST.,M.Eng.Sc,Dr.Eng Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
Analisis Kenyamanan serta Redesain Pegas Suspensi Mobil Toyota Fortuner 4.0 V6 SR (AT 4x4)
") Analisis Kenyamanan serta Redesain Pegas Suspensi Mobil Toyota Fortuner 4.0 V6 SR (AT 4x4) Puja Priyambada dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
Analisis Kenyamanan serta Redesain Pegas Suspensi Mobil Toyota Fortuner 4.0 V6 SR (AT 4x4) Puja Priyambada dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
Pengembangan Prototipe Hybrid Shock Absorber : Kombinasi Viscous dan Regenerative Shock Absorber
 JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) ISSN: 2301-9271 1 Pengembangan Prototipe Hybrid Shock : Kombinasi Viscous dan Regenerative Shock Mohammad Ikhsani dan Harus Laksana Guntur Jurusan Teknik Mesin,
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) ISSN: 2301-9271 1 Pengembangan Prototipe Hybrid Shock : Kombinasi Viscous dan Regenerative Shock Mohammad Ikhsani dan Harus Laksana Guntur Jurusan Teknik Mesin,
Analisa Aplikasi Peredam Getaran Dinamik Pada Model Setengah Mobil Empat Derajat Kebebasan Berbasis Respon Amplitudo
 Analisa Aplikasi Peredam Getaran Dinamik Pada Model Setengah Mobil Empat Derajat Kebebasan Berbasis Respon Amplitudo Apriyanto S. 247 1 6 Pembimbing : Ir. Jerri Susatio, M.T. 1954117 1983 1 5 Latar Belakang
Analisa Aplikasi Peredam Getaran Dinamik Pada Model Setengah Mobil Empat Derajat Kebebasan Berbasis Respon Amplitudo Apriyanto S. 247 1 6 Pembimbing : Ir. Jerri Susatio, M.T. 1954117 1983 1 5 Latar Belakang
Redesign Sistem Peredam Sekunder dan Analisis Pengaruh Variasi Nilai Koefisien Redam Terhadap Respon Dinamis Kereta Api Penumpang Ekonomi (K3)
") E33 Redesign Sistem Peredam Sekunder dan Analisis Pengaruh Variasi Nilai Koefisien Redam Terhadap Respon Dinamis Kereta Api Penumpang Ekonomi (K3) Dewani Intan Asmarani Permana dan Harus Laksana Guntur
E33 Redesign Sistem Peredam Sekunder dan Analisis Pengaruh Variasi Nilai Koefisien Redam Terhadap Respon Dinamis Kereta Api Penumpang Ekonomi (K3) Dewani Intan Asmarani Permana dan Harus Laksana Guntur
ANALISIS GETARAN PADA SISTEM SUSPENSI KENDARAAN RODA DUA (YAMAHA JUPITER Z 2004) MENGGUNAKAN SIMULASI SOFTWARE MATLAB 6.5
 MENGGUNAKAN SIMULASI SOFTWARE MATLAB 6.5") NASKAH PUBLIKASI KARYA ILMIAH ANALISIS GETARAN PADA SISTEM SUSPENSI KENDARAAN RODA DUA (YAMAHA JUPITER Z 2004) MENGGUNAKAN SIMULASI SOFTWARE MATLAB 6.5 Disusun oleh : SUHANDOKO NIM : D200080001 JURUSAN
NASKAH PUBLIKASI KARYA ILMIAH ANALISIS GETARAN PADA SISTEM SUSPENSI KENDARAAN RODA DUA (YAMAHA JUPITER Z 2004) MENGGUNAKAN SIMULASI SOFTWARE MATLAB 6.5 Disusun oleh : SUHANDOKO NIM : D200080001 JURUSAN
JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: ( Print) F 113
 ISSN: ( Print) F 113") JURNAL TEKNIK ITS Vol. 6, No. 1, (017) ISSN: 337-3539 (301-971 Print) F 113 Pemodelan dan Analisis Pengaruh Perubahan Parameter Orifice Sistem Hidrolik Terhadap Gaya Redam yang Dihasilkan dan Respon Dinamis
JURNAL TEKNIK ITS Vol. 6, No. 1, (017) ISSN: 337-3539 (301-971 Print) F 113 Pemodelan dan Analisis Pengaruh Perubahan Parameter Orifice Sistem Hidrolik Terhadap Gaya Redam yang Dihasilkan dan Respon Dinamis
Analisa Variable Moment of Inertia (VMI) Flywheel pada Hydro-Shock Absorber Kendaraan
 Flywheel pada Hydro-Shock Absorber Kendaraan") B-542 JURNAL TEKNIK ITS Vol. 5 No. 2 (2016) ISSN: 2337-3539 (2301-9271 Print) Analisa Variable Moment of Inertia (VMI) Flywheel pada Hydro-Shock Absorber Kendaraan Hasbulah Zarkasy, Harus Laksana Guntur
B-542 JURNAL TEKNIK ITS Vol. 5 No. 2 (2016) ISSN: 2337-3539 (2301-9271 Print) Analisa Variable Moment of Inertia (VMI) Flywheel pada Hydro-Shock Absorber Kendaraan Hasbulah Zarkasy, Harus Laksana Guntur
Seminar Nasional Cendekiawan ke 3 Tahun 2017 ISSN (P) : Buku 3 ISSN (E) :
 : Buku 3 ISSN (E) :") Seminar Nasional Cendekiawan ke 3 Tahun 7 ISSN (P) : 46-8696 Buku 3 ISSN (E) : 54-7589 Pengembangan Analisa Suspensi Kendaraan Roda Empat menggunakan Pemodelan 3 DOF dengan SistemSeperempat Mobil Andang
Seminar Nasional Cendekiawan ke 3 Tahun 7 ISSN (P) : 46-8696 Buku 3 ISSN (E) : 54-7589 Pengembangan Analisa Suspensi Kendaraan Roda Empat menggunakan Pemodelan 3 DOF dengan SistemSeperempat Mobil Andang
Pengaruh Perubahan Posisi Sumber Eksitasi dan Massa DVA dari Titik Berat Massa Beam Terhadap Karakteristik Getaran Translasi dan Rotasi
 Pengaruh Perubahan Posisi Sumber Eksitasi dan Massa DVA dari Titik Berat Massa Beam Terhadap Karakteristik Getaran Translasi dan Rotasi Abdul Rohman 1,*, Harus Laksana Guntur 2 1 Program Pascasarjana Bidang
Pengaruh Perubahan Posisi Sumber Eksitasi dan Massa DVA dari Titik Berat Massa Beam Terhadap Karakteristik Getaran Translasi dan Rotasi Abdul Rohman 1,*, Harus Laksana Guntur 2 1 Program Pascasarjana Bidang
JURNAL TEKNIK ITS Vol. 4, No. 1, (2015) ISSN:
 ISSN:") JURNAL TEKNIK ITS Vol. 4, No. 1, (15) ISSN: 31-971 1 Pemodelan dan Analisis Respon Dinamis Kendaraan Truk Akibat Pengaruh Profil Jalan dan Getaran Engine Prayogi Adista P. dan Wiwiek Hendrowati Teknik
JURNAL TEKNIK ITS Vol. 4, No. 1, (15) ISSN: 31-971 1 Pemodelan dan Analisis Respon Dinamis Kendaraan Truk Akibat Pengaruh Profil Jalan dan Getaran Engine Prayogi Adista P. dan Wiwiek Hendrowati Teknik
PENGARUH GETARAN TERHADAP PENUMPANG KENDARAAN. Sutarno. Abstraction
 PENGARUH GETARAN TERHADAP PENUMPANG KENDARAAN Sutarno Abstraction Comfortableness going up the motor vehicle in this time very wantek even sometimes become a compulsion. One of way of creating the comfort
PENGARUH GETARAN TERHADAP PENUMPANG KENDARAAN Sutarno Abstraction Comfortableness going up the motor vehicle in this time very wantek even sometimes become a compulsion. One of way of creating the comfort
ANALISA DESAIN STRUKTUR DAN KESTABILAN SUSPENSI PASSIVE PADA SMART PERSONAL VEHICLE 2 RODA
 SIDANG TUGAS AKHIR ANALISA DESAIN STRUKTUR DAN KESTABILAN SUSPENSI PASSIVE PADA SMART PERSONAL VEHICLE 2 RODA Disusun oleh Yonathan A. Kapugu (2106100019) Dosen pembimbing Prof. Ir. IN Sutantra, M.Sc.,
SIDANG TUGAS AKHIR ANALISA DESAIN STRUKTUR DAN KESTABILAN SUSPENSI PASSIVE PADA SMART PERSONAL VEHICLE 2 RODA Disusun oleh Yonathan A. Kapugu (2106100019) Dosen pembimbing Prof. Ir. IN Sutantra, M.Sc.,
Simulasi Sederhana tentang Energy Harvesting pada Sistem Suspensi
 Simulasi Sederhana tentang Energy Harvesting pada Sistem Suspensi mochamad nur qomarudin, februari 015 mnurqomarudin.blogspot.com, alfiyahibnumalik@gmail.com bismillah. seorang kawan meminta saya mempelajari
Simulasi Sederhana tentang Energy Harvesting pada Sistem Suspensi mochamad nur qomarudin, februari 015 mnurqomarudin.blogspot.com, alfiyahibnumalik@gmail.com bismillah. seorang kawan meminta saya mempelajari
Talifatim Machfuroh 4
 PENGARUH PENAMBAHAN DUAL DYNAMIC VIBRATION ABSORBER (DDVA)- DEPENDENT DALAM PEREDAMAN GETARAN PADA SISTEM UTAMA 2-DOF Talifatim Machfuroh 4 Abstrak: Suatu sistem yang beroperasi dapat mengalami getaran
PENGARUH PENAMBAHAN DUAL DYNAMIC VIBRATION ABSORBER (DDVA)- DEPENDENT DALAM PEREDAMAN GETARAN PADA SISTEM UTAMA 2-DOF Talifatim Machfuroh 4 Abstrak: Suatu sistem yang beroperasi dapat mengalami getaran
Rancang Bangun Sistem Suspensi Semiaktif Untuk Peningkatan Kenyamanan Kendaraan
 Rancang Bangun Sistem Suspensi Semiaktif Untuk Peningkatan Kenyamanan Kendaraan A. Aziz Achmad Laboratorium Mekanika Benda Padat Jurusan Teknik Mesin FTI ITS Abstrak Suspensi merupakan komponen yang penting
Rancang Bangun Sistem Suspensi Semiaktif Untuk Peningkatan Kenyamanan Kendaraan A. Aziz Achmad Laboratorium Mekanika Benda Padat Jurusan Teknik Mesin FTI ITS Abstrak Suspensi merupakan komponen yang penting
Analisis Perbandingan Respon Dinamis Dari Kendaraan Yang Menggunakan Shock Absorber Hidrolis Dan Yang Menggunakan Sistem Peredam Dual Flywheel
 JURNAL TEKNIK ITS Vol. 6, No., (25) ISSN: 2337-3539 (23-927 Print) F 49 Analisis Perbandingan Respon Dinamis Dari Kendaraan Yang Menggunakan Shock Absorber Hidrolis Dan Yang Menggunakan Sistem Peredam
JURNAL TEKNIK ITS Vol. 6, No., (25) ISSN: 2337-3539 (23-927 Print) F 49 Analisis Perbandingan Respon Dinamis Dari Kendaraan Yang Menggunakan Shock Absorber Hidrolis Dan Yang Menggunakan Sistem Peredam
Simulasi Peredam Getaran TDVA dan DDVA Tersusun Seri terhadap Respon Getaran Translasi Sistem Utama. Aini Lostari 1,a*
 Journal of Mechanical Engineering and Mechatronics Submitted : 2017-09-15 ISSN: 2527-6212, Vol. 2 No. 1, pp. 11-16 Accepted : 2017-09-21 2017 Pres Univ Press Publication, Indonesia Simulasi Peredam Getaran
Journal of Mechanical Engineering and Mechatronics Submitted : 2017-09-15 ISSN: 2527-6212, Vol. 2 No. 1, pp. 11-16 Accepted : 2017-09-21 2017 Pres Univ Press Publication, Indonesia Simulasi Peredam Getaran
JURNAL TEKNIK ITS Vol. 7, No. 1 (2018), ( Print)
, ( Print)") E27 Rancang Bangun dan Analisis Karakteristik Dinamis Atmospheric Pressure Shock Absorber (APSA) dengan Diameter Silinder 60 mm dan Diameter Orifice 1 mm Pada Kendaraan Angkut Bima Adisetya Putra dan Harus
E27 Rancang Bangun dan Analisis Karakteristik Dinamis Atmospheric Pressure Shock Absorber (APSA) dengan Diameter Silinder 60 mm dan Diameter Orifice 1 mm Pada Kendaraan Angkut Bima Adisetya Putra dan Harus
Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda
 E97 Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda Yansen Prayitno dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
E97 Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda Yansen Prayitno dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
SIMULASI DAN ANALISA LINTASAN KENDARAAN RODA TIGA REVERSE TRIKE DENGAN PENERAPAN PID CONTROLLER
 SIMULASI DAN ANALISA LINTASAN KENDARAAN RODA TIGA REVERSE TRIKE DENGAN PENERAPAN PID CONTROLLER Gilang Pratama Putra Jurusan Teknik Mesin Fakultas Teknik Universitas Sebelas Maret Abstrak Tujuan penelitian
SIMULASI DAN ANALISA LINTASAN KENDARAAN RODA TIGA REVERSE TRIKE DENGAN PENERAPAN PID CONTROLLER Gilang Pratama Putra Jurusan Teknik Mesin Fakultas Teknik Universitas Sebelas Maret Abstrak Tujuan penelitian
Studi Pengaruh Penambahan Dual Dynamic Vibration Absorber (DDVA)-Dependent Terhadap Respon Getaran Translasi Dan Rotasi Pada Sistem Utama 2-DOF
-Dependent Terhadap Respon Getaran Translasi Dan Rotasi Pada Sistem Utama 2-DOF") Studi Pengaruh Penambahan Dual Dynamic Vibration Absorber (DDVA)-Dependent Terhadap Respon Getaran Translasi Dan Rotasi Pada Sistem Utama 2-DOF Talifatim Machfuroh 1,*, Harus Laksana Guntur 2 1 Mahasiswa
Studi Pengaruh Penambahan Dual Dynamic Vibration Absorber (DDVA)-Dependent Terhadap Respon Getaran Translasi Dan Rotasi Pada Sistem Utama 2-DOF Talifatim Machfuroh 1,*, Harus Laksana Guntur 2 1 Mahasiswa
Pemodelan dan Analisis Simulator Gempa Penghasil Gerak Translasi
 JURNAL TEKNIK ITS Vol. 6, No. 1, (2015) ISSN: 2337-3539 (2301-9271 Print) F 164 Pemodelan dan Analisis Simulator Gempa Penghasil Gerak Translasi Tiara Angelita Cahyaningrum dan Harus Laksana Guntur Laboratorium
JURNAL TEKNIK ITS Vol. 6, No. 1, (2015) ISSN: 2337-3539 (2301-9271 Print) F 164 Pemodelan dan Analisis Simulator Gempa Penghasil Gerak Translasi Tiara Angelita Cahyaningrum dan Harus Laksana Guntur Laboratorium
Optimasi Pengaktifan Motor Penggerak pada Prototipe Sepeda Motor Hibrid untuk Menurunkan Konsumsi Bahan Bakar
 ISBN 978-979-3541-50-1 IRWNS 2015 Optimasi Pengaktifan Motor Penggerak pada Prototipe Sepeda Motor Hibrid untuk Menurunkan Konsumsi Bahan Bakar Aris Suryadi, Budi Triyono Jurusan Teknik Mesin Politeknik
ISBN 978-979-3541-50-1 IRWNS 2015 Optimasi Pengaktifan Motor Penggerak pada Prototipe Sepeda Motor Hibrid untuk Menurunkan Konsumsi Bahan Bakar Aris Suryadi, Budi Triyono Jurusan Teknik Mesin Politeknik
Kata kunci : regenerative shock absorber, orifice, gaya redam, daya bangkitan
 Banjarmasin, 7-8 Oktober 15 Pengaruh Variasi Diameter Orifice Terhadap Karakteristik Dinamis Hydraulic Motor Regenerative Shock Absorber (HMRSA) dengan Satu Silinder Hidraulik Aida Annisa Amin Daman 1,
Banjarmasin, 7-8 Oktober 15 Pengaruh Variasi Diameter Orifice Terhadap Karakteristik Dinamis Hydraulic Motor Regenerative Shock Absorber (HMRSA) dengan Satu Silinder Hidraulik Aida Annisa Amin Daman 1,
BAB 2 LANDASAN TEORI. Metode ini digunakan untuk menyelesaikan permasalahan yang terjadi pada
 BAB 2 LANDASAN TEORI 2.1 Metode Kendali Umpan Maju Metode ini digunakan untuk menyelesaikan permasalahan yang terjadi pada fenomena berkendara ketika berbelok, dimana dilakukan pemodelan matematika yang
BAB 2 LANDASAN TEORI 2.1 Metode Kendali Umpan Maju Metode ini digunakan untuk menyelesaikan permasalahan yang terjadi pada fenomena berkendara ketika berbelok, dimana dilakukan pemodelan matematika yang
PEMODELAN DAN ANALISA DINAMIKA (ENERGI TERDISIPASI) PADA GERAK VERTIKAL ANTARA BOGIE DAN GERBONG KERETA API
 PADA GERAK VERTIKAL ANTARA BOGIE DAN GERBONG KERETA API") SIDANG TUGAS AKHIR PEMODELAN DAN ANALISA DINAMIKA (ENERGI TERDISIPASI) PADA GERAK VERTIKAL ANTARA BOGIE DAN GERBONG KERETA API Disusun oleh Yohanes Dhani Kristianto (20800626) Dosen pembimbing Ir. YUNARKO
SIDANG TUGAS AKHIR PEMODELAN DAN ANALISA DINAMIKA (ENERGI TERDISIPASI) PADA GERAK VERTIKAL ANTARA BOGIE DAN GERBONG KERETA API Disusun oleh Yohanes Dhani Kristianto (20800626) Dosen pembimbing Ir. YUNARKO
Desain dan Analisa Sistem Suspensi Mobil Multiguna Pedesaan Menggunakan Peredam Magnetorheological Dengan Standar Kenyamanan ISO 2631
 A739 Desain dan Analisa Sistem Suspensi Mobil Multiguna Pedesaan Menggunakan Peredam Magnetorheological Dengan Standar Kenyamanan ISO 2631 Fridam Amruloh Baqarizky dan I Nyoman Sutantra Departemen Teknik
A739 Desain dan Analisa Sistem Suspensi Mobil Multiguna Pedesaan Menggunakan Peredam Magnetorheological Dengan Standar Kenyamanan ISO 2631 Fridam Amruloh Baqarizky dan I Nyoman Sutantra Departemen Teknik
Perancangan dan Analisa Sistem Kemudi Narrow Tilting Vehicle dengan Variasi Trackwidth dan Panjang Suspensi Arm
 E126 Perancangan dan Analisa Sistem Kemudi Narrow Tilting Vehicle dengan Variasi Trackwidth dan Panjang Suspensi Arm Idestrian Adzanta dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri,
E126 Perancangan dan Analisa Sistem Kemudi Narrow Tilting Vehicle dengan Variasi Trackwidth dan Panjang Suspensi Arm Idestrian Adzanta dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri,
BAB 1 PENDAHULUAN 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Perkembangan otomotif yang berkembang pesat pada abad ini memunculkan tuntutan yang seakin besar Dari tingkat keamanan sampai kenyamanan. Dalam desain Otomotif selalu
BAB 1 PENDAHULUAN 1.1 Latar Belakang Perkembangan otomotif yang berkembang pesat pada abad ini memunculkan tuntutan yang seakin besar Dari tingkat keamanan sampai kenyamanan. Dalam desain Otomotif selalu
PEMODELAN DAN SIMULASI DINAMIKA HANDLING MOBIL LISTRIK UNS GENERASI II Krinantyo Pamungkas 1, a, Didik Djoko Susilo 2,b* dan Ubaidillah 3,c
 Banjarmasin, 7-8 Oktober 215 PEMODELAN DAN SIMULASI DINAMIKA HANDLING MOBIL LISTRIK UNS GENERASI II Krinantyo Pamungkas 1, a, Didik Djoko Susilo 2,b* dan Ubaidillah 3,c 1,2,3 Jurusan Teknik Mesin Fakultas
Banjarmasin, 7-8 Oktober 215 PEMODELAN DAN SIMULASI DINAMIKA HANDLING MOBIL LISTRIK UNS GENERASI II Krinantyo Pamungkas 1, a, Didik Djoko Susilo 2,b* dan Ubaidillah 3,c 1,2,3 Jurusan Teknik Mesin Fakultas
BAB I PENDAHULUAN 1.1 LATAR BELAKANG
 BAB I PENDAHULUAN 1.1 LATAR BELAKANG Sistem suspensi merupakan bagian yang sangat berperan untuk meningkatkan kenyamanan dalam berkendaraan, karena sistem ini adalah bagian yang menumpu atau menahan berat
BAB I PENDAHULUAN 1.1 LATAR BELAKANG Sistem suspensi merupakan bagian yang sangat berperan untuk meningkatkan kenyamanan dalam berkendaraan, karena sistem ini adalah bagian yang menumpu atau menahan berat
STUDI EKSPERIMEN REDAMAN GETARAN TRANSLASI DAN ROTASI DENGAN POSISI SUMBER EKSITASI DVA (DYNAMIC VIBRATION ABSORBER)
") STUDI EKSPERIMEN REDAMAN GETARAN TRANSLASI DAN ROTASI DENGAN POSISI SUMBER EKSITASI DVA (DYNAMIC VIBRATION ABSORBER) Abdul Rohman Staf Pengajar Prodi Teknik Mesin, Politeknik Negeri Banyuwangi E-mail :
STUDI EKSPERIMEN REDAMAN GETARAN TRANSLASI DAN ROTASI DENGAN POSISI SUMBER EKSITASI DVA (DYNAMIC VIBRATION ABSORBER) Abdul Rohman Staf Pengajar Prodi Teknik Mesin, Politeknik Negeri Banyuwangi E-mail :
JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: ( Print) E120
 ISSN: ( Print) E120") JURNAL TEKNIK ITS Vol., No. 2, (216) ISSN: 2337-39 (231-9271 Print) E12 Perancangan dan Analisa Sistem Kemudi dan Sistem Suspensi Quadrilateral Pada Narrow Tilting Vehicle Rizal Pribadi Restuaji, dan Unggul
JURNAL TEKNIK ITS Vol., No. 2, (216) ISSN: 2337-39 (231-9271 Print) E12 Perancangan dan Analisa Sistem Kemudi dan Sistem Suspensi Quadrilateral Pada Narrow Tilting Vehicle Rizal Pribadi Restuaji, dan Unggul
PEMODELAN dan SIMULASI SISTEM SUSPENSI MOBIL ABSTRAK
 PEMODELAN dan SIMULASI SISTEM SUSPENSI MOBIL Boby / 0622086 E-mail : boby_18jan@yahoo.com Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha Jalan Prof. Drg. Suria Sumantri 65 Bandung
PEMODELAN dan SIMULASI SISTEM SUSPENSI MOBIL Boby / 0622086 E-mail : boby_18jan@yahoo.com Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha Jalan Prof. Drg. Suria Sumantri 65 Bandung
JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: ( Print) F 132
 ISSN: ( Print) F 132") JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2337-3539 (2301-9271 Print) F 132 Pemodelan dan Analisa Reduksi Respon Getaran Translasi pada Sistem Utama dan Energi Listrik yang Dihasilkan oleh Mekanisme
JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2337-3539 (2301-9271 Print) F 132 Pemodelan dan Analisa Reduksi Respon Getaran Translasi pada Sistem Utama dan Energi Listrik yang Dihasilkan oleh Mekanisme
Simulasi Peredaman Getaran Bangunan dengan Model Empat Tumpuan
 JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) 1-5 1 Simulasi Peredaman Getaran Bangunan dengan Model Empat Tumpuan Fitriana Ariesta Dewi dan Ir. Yerri Susatio, MT Teknik Fisika, Fakultas Teknologi Industri,
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) 1-5 1 Simulasi Peredaman Getaran Bangunan dengan Model Empat Tumpuan Fitriana Ariesta Dewi dan Ir. Yerri Susatio, MT Teknik Fisika, Fakultas Teknologi Industri,
Analisa Kenyamanan Kendaraan Angkut Massal dengan Pemodelan Pengemudi sebagai Sistem Multi-DOF
 JURNAL TEKNIK POMITS Vol. 1, No., (1) ISSN: 31-971 E-1 Analisa Kenyamanan Kendaraan Angkut Massal dengan Pemodelan Pengemudi sebagai Sistem Multi-DOF Nava Amalia, Harus Laksana Guntur Teknik Mesin, Fakultas
JURNAL TEKNIK POMITS Vol. 1, No., (1) ISSN: 31-971 E-1 Analisa Kenyamanan Kendaraan Angkut Massal dengan Pemodelan Pengemudi sebagai Sistem Multi-DOF Nava Amalia, Harus Laksana Guntur Teknik Mesin, Fakultas
Desain dan Analisa Sistem Suspensi Mobil Multiguna Pedesaan Menggunakan Peredam Magnetorheological Dengan Standar Kenyamanan ISO 2631
 JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: 2337-3539 (2301-9271 Print) A-833 Desain dan Analisa Sistem Suspensi Mobil Multiguna Pedesaan Menggunakan Peredam Magnetorheological Dengan Standar Kenyamanan
JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: 2337-3539 (2301-9271 Print) A-833 Desain dan Analisa Sistem Suspensi Mobil Multiguna Pedesaan Menggunakan Peredam Magnetorheological Dengan Standar Kenyamanan
Pengembangan Dan Studi Karakteristik Prototipe Regenerative Shock Absorber Sistem Hidrolik
 ISSN Cetak: 2087-4286; ISSN On Line: 2580-6017 Pengembangan Dan Studi Karakteristik Prototipe Regenerative Shock Absorber Sistem Hidrolik 1 Kadaryono, 2 Mualifi Usman 1,2 Teknik Mesin, Universitas Darul
ISSN Cetak: 2087-4286; ISSN On Line: 2580-6017 Pengembangan Dan Studi Karakteristik Prototipe Regenerative Shock Absorber Sistem Hidrolik 1 Kadaryono, 2 Mualifi Usman 1,2 Teknik Mesin, Universitas Darul
PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD
 PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Oleh: Bagus Kusuma Ruswandiri 2108100120 Dosen Pembimbing: Prof. Ir. I Nyoman Sutantra, M.Sc., Ph.D. Latar Belakang
PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Oleh: Bagus Kusuma Ruswandiri 2108100120 Dosen Pembimbing: Prof. Ir. I Nyoman Sutantra, M.Sc., Ph.D. Latar Belakang
JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1
 ISSN: 2301-9271 1") JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1 Analisa Kestabilan Arah pada Kendaraan Formula Sapu Angin Speed Berdasarkan Variasi Posisi Titik Berat, Kecepatan dan Tes Dinamik Student Formula
JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1 Analisa Kestabilan Arah pada Kendaraan Formula Sapu Angin Speed Berdasarkan Variasi Posisi Titik Berat, Kecepatan dan Tes Dinamik Student Formula
Analisis Stabilitas Arah Mobil Toyota Agya G dengan Variasi Jumlah Penumpang, Kecepatan Belok, Sudut Belok dan Kemiringan Melintang Jalan
 JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2301-9271 A-35 Analisis Stabilitas Arah Mobil Toyota Agya G dengan Variasi Jumlah Penumpang, Kecepatan Belok, Sudut Belok dan Kemiringan Melintang Jalan Faisal
JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2301-9271 A-35 Analisis Stabilitas Arah Mobil Toyota Agya G dengan Variasi Jumlah Penumpang, Kecepatan Belok, Sudut Belok dan Kemiringan Melintang Jalan Faisal
PENGEMBANGAN DRIVING SIMULATOR KENDARAAN RODA EMPAT GUNA PENELITIAN SERTA PENINGKATAN KESADARAN ATAS PENGEMUDIAN YANG AMAN, NYAMAN DAN EFISIEN
 PENGEMBANGAN DRIVING SIMULATOR KENDARAAN RODA EMPAT GUNA PENELITIAN SERTA PENINGKATAN KESADARAN ATAS PENGEMUDIAN YANG AMAN, NYAMAN DAN EFISIEN D. Michael Hendra, Joga Dharma Setiawan Jurusan Teknik Mesin
PENGEMBANGAN DRIVING SIMULATOR KENDARAAN RODA EMPAT GUNA PENELITIAN SERTA PENINGKATAN KESADARAN ATAS PENGEMUDIAN YANG AMAN, NYAMAN DAN EFISIEN D. Michael Hendra, Joga Dharma Setiawan Jurusan Teknik Mesin
JURNAL TEKNIK ITS Vol. 6, No. 1, (2015) ISSN: ( Print) F 126
 ISSN: ( Print) F 126") JURNAL TEKNIK ITS Vol. 6, No. 1, (015) ISSN: 337-3539 (301-971 Print) F 16 Pemodelan dan Analisis Pengaruh Penggunaan Adaptive Shock Absorber Menggunakan Terhadap Karakteristik Gaya Redam dan Respon Dinamis
JURNAL TEKNIK ITS Vol. 6, No. 1, (015) ISSN: 337-3539 (301-971 Print) F 16 Pemodelan dan Analisis Pengaruh Penggunaan Adaptive Shock Absorber Menggunakan Terhadap Karakteristik Gaya Redam dan Respon Dinamis
Simulasi Komputer untuk Analisis Karakteristik Model Sistem Pegas- Peredam Kejut- Massa
 Simulasi Komputer untuk Analisis Larakteristik Model Sistem Pegas-Peredam Kejut-Massa (Oegik Soegihardjo) Simulasi Komputer untuk Analisis Karakteristik Model Sistem Pegas- Peredam Kejut- Massa Oegik Soegihardjo
Simulasi Komputer untuk Analisis Larakteristik Model Sistem Pegas-Peredam Kejut-Massa (Oegik Soegihardjo) Simulasi Komputer untuk Analisis Karakteristik Model Sistem Pegas- Peredam Kejut- Massa Oegik Soegihardjo
ANALISA STABILITAS DINDING PENAHAN TANAH (RETAINING WALL) AKIBAT BEBAN DINAMIS DENGAN SIMULASI NUMERIK ABSTRAK
 AKIBAT BEBAN DINAMIS DENGAN SIMULASI NUMERIK ABSTRAK") VOLUME 6 NO., OKTOBER 010 ANALISA STABILITAS DINDING PENAHAN TANAH (RETAINING WALL) AKIBAT BEBAN DINAMIS DENGAN SIMULASI NUMERIK Oscar Fithrah Nur 1, Abdul Hakam ABSTRAK Penggunaan simulasi numerik dalam
VOLUME 6 NO., OKTOBER 010 ANALISA STABILITAS DINDING PENAHAN TANAH (RETAINING WALL) AKIBAT BEBAN DINAMIS DENGAN SIMULASI NUMERIK Oscar Fithrah Nur 1, Abdul Hakam ABSTRAK Penggunaan simulasi numerik dalam
Kata kunci: understeer, oversteer.
 1 ANALISA PERILAKU ARAH MOBIL GEA PADA LINTASAN BELOK MENURUN DENGAN VARIASI KECEPATAN, BERAT MUATAN, SUDUT KEMIRINGAN MELINTANG, SUDUT TURUNAN JALAN DAN RADIUS BELOK JALAN Rizqi An Naafi dan J. Lubi Jurusan
1 ANALISA PERILAKU ARAH MOBIL GEA PADA LINTASAN BELOK MENURUN DENGAN VARIASI KECEPATAN, BERAT MUATAN, SUDUT KEMIRINGAN MELINTANG, SUDUT TURUNAN JALAN DAN RADIUS BELOK JALAN Rizqi An Naafi dan J. Lubi Jurusan
SIMULASI DAN ANALISA HANDLING PERFORMANCE PADA KENDARAAN SEDAN DENGAN MENGGUNAKAN SOFTWARE CARSIMED 4.51
 TUGAS SARJANA SIMULASI DAN ANALISA HANDLING PERFORMANCE PADA KENDARAAN SEDAN DENGAN MENGGUNAKAN SOFTWARE CARSIMED 4.51 Diajukan sebagai salah satu tugas dan syarat untuk memperoleh gelar Sarjana (S-1)
TUGAS SARJANA SIMULASI DAN ANALISA HANDLING PERFORMANCE PADA KENDARAAN SEDAN DENGAN MENGGUNAKAN SOFTWARE CARSIMED 4.51 Diajukan sebagai salah satu tugas dan syarat untuk memperoleh gelar Sarjana (S-1)
BAB I PENDAHULUAN 1.1. Latar Belakang
 BAB I PENDAHULUAN 1.1. Latar Belakang Salah satu sistem yang ditanamkan pada setiap mobil adalah sistem suspensi pada masing-masing roda. Sistem suspensi digunakan untuk menahan gangguan-gangguan vertikal
BAB I PENDAHULUAN 1.1. Latar Belakang Salah satu sistem yang ditanamkan pada setiap mobil adalah sistem suspensi pada masing-masing roda. Sistem suspensi digunakan untuk menahan gangguan-gangguan vertikal
JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: ( Print) F 76
 ISSN: ( Print) F 76") JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2337-3539 (2301-9271 Print) F 76 Pemodelan Dan Analisis Pengaruh Variasi Oli dan Diameter Orifice terhadap Gaya Redam Shock Absorber Dan Respon Dinamis Sepeda
JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2337-3539 (2301-9271 Print) F 76 Pemodelan Dan Analisis Pengaruh Variasi Oli dan Diameter Orifice terhadap Gaya Redam Shock Absorber Dan Respon Dinamis Sepeda
BUKU RANCANGAN PENGAJARAN MATA AJAR GETARAN MEKANIS. oleh. Tim Dosen Mata Kuliah Getaran Mekanis. Fakultas Teknik Universitas Indonesia Februari 2016
 BUKU RANCANGAN PENGAJARAN MATA AJAR GETARAN MEKANIS oleh Tim Dosen Mata Kuliah Getaran Mekanis Fakultas Teknik Universitas Indonesia Februari 2016 DAFTAR ISI hlm. PENGANTAR 4 BAB 1 INFORMASI UMUM 5 BAB
BUKU RANCANGAN PENGAJARAN MATA AJAR GETARAN MEKANIS oleh Tim Dosen Mata Kuliah Getaran Mekanis Fakultas Teknik Universitas Indonesia Februari 2016 DAFTAR ISI hlm. PENGANTAR 4 BAB 1 INFORMASI UMUM 5 BAB
SIMULASI PENGENDALIAN SUDUT KEMIRINGAN BELOK SEPEDA MOTOR MELALUI PENAMBAHAN KOMPONEN GYROSCOPIC
 SIMULASI PENGENDALIAN SUDUT KEMIRINGAN BELOK SEPEDA MOTOR MELALUI PENAMBAHAN KOMPONEN GYROSCOPIC I Ketut Adi Atmika, I DG Ary Subagia Jurusan Teknik Mesin, Fakultas Teknik, Universitas Udayana E-mail :
SIMULASI PENGENDALIAN SUDUT KEMIRINGAN BELOK SEPEDA MOTOR MELALUI PENAMBAHAN KOMPONEN GYROSCOPIC I Ketut Adi Atmika, I DG Ary Subagia Jurusan Teknik Mesin, Fakultas Teknik, Universitas Udayana E-mail :
Analisa Kekuatan Material Velg Sepeda Motor Jenis Casting Wheel Terhadap Tumbukan dengan Variasi Kecepatan
 Tugas Akhir Analisa Kekuatan Material Velg Sepeda Motor Jenis Casting Wheel Terhadap Tumbukan dengan Variasi Kecepatan Oleh : Aldila Ningtyas 2108 100 003 Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik
Tugas Akhir Analisa Kekuatan Material Velg Sepeda Motor Jenis Casting Wheel Terhadap Tumbukan dengan Variasi Kecepatan Oleh : Aldila Ningtyas 2108 100 003 Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik
Ardi Noerpamoengkas Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
 Ardi Noerpamoengkas 2106 100 101 Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Latar Belakang Teknologi pengembangan potensi energi gelombang laut untuk memecahkan
Ardi Noerpamoengkas 2106 100 101 Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Latar Belakang Teknologi pengembangan potensi energi gelombang laut untuk memecahkan
Seminar Nasional Mesin dan Industri (SNMI4) 2008
 2008") Seminar Nasional Mesin dan Industri (SNMI) ANALISA KINEMATIKA GERAKAN BELOK AKIBAT PENGARUH DYNAMIC CENTRE OF GRAVITY (COG) DAN PANJANG WHEELBASE (L) MENENTUKAN SUDUT SIDE SLIP (Β) DAN HUBUNGANNYA TERHADAP
Seminar Nasional Mesin dan Industri (SNMI) ANALISA KINEMATIKA GERAKAN BELOK AKIBAT PENGARUH DYNAMIC CENTRE OF GRAVITY (COG) DAN PANJANG WHEELBASE (L) MENENTUKAN SUDUT SIDE SLIP (Β) DAN HUBUNGANNYA TERHADAP
JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: ( Print) B-270
 ISSN: ( Print) B-270") JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: 2337-3539 (2301-9271 Print) B-270 Studi Karakteristik Reduksi Getaran Translasi Dan Rotasi Sistem Utama dan Energi Listrik yang Dihasilkan oleh Mekanisme Cantilever
JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: 2337-3539 (2301-9271 Print) B-270 Studi Karakteristik Reduksi Getaran Translasi Dan Rotasi Sistem Utama dan Energi Listrik yang Dihasilkan oleh Mekanisme Cantilever
STUDI KARAKTERISTIK REGENERATIF SHOCK ABSORBER DOUBLE SILINDER HYDRAULIC ACTUATOR DENGAN VARIASI VISKOSITAS OLI
 STUDI KARAKTERISTIK REGENERATIF SHOCK ABSORBER DOUBLE SILINDER HYDRAULIC ACTUATOR DENGAN VARIASI VISKOSITAS OLI Wanda Afnison 1 dan Harus Laksana Guntur 2 Mahasiswa Program Magister, Jurusan Teknik Mesin
STUDI KARAKTERISTIK REGENERATIF SHOCK ABSORBER DOUBLE SILINDER HYDRAULIC ACTUATOR DENGAN VARIASI VISKOSITAS OLI Wanda Afnison 1 dan Harus Laksana Guntur 2 Mahasiswa Program Magister, Jurusan Teknik Mesin
BAB 3 DINAMIKA STRUKTUR
 BAB 3 DINAMIKA STRUKTUR Gerakan dari struktur terapung akan dipengaruhi oleh keadaan sekitarnya, dimana terdapat gaya gaya luar yang bekerja pada struktur dan akan menimbulkan gerakan pada struktur. Untuk
BAB 3 DINAMIKA STRUKTUR Gerakan dari struktur terapung akan dipengaruhi oleh keadaan sekitarnya, dimana terdapat gaya gaya luar yang bekerja pada struktur dan akan menimbulkan gerakan pada struktur. Untuk
Surya Hadi Putranto
 TUGAS AKHIR Rancang Bangun Speed Bump dan Analisa Respon Speed Bump Terhadap Kecepatan Kendaraan Dosen Pembimbing : Ir. Abdul Aziz Achmad Surya Hadi Putranto 2105100163 Latar Belakang Dalam kehidupan sehari-hari,
TUGAS AKHIR Rancang Bangun Speed Bump dan Analisa Respon Speed Bump Terhadap Kecepatan Kendaraan Dosen Pembimbing : Ir. Abdul Aziz Achmad Surya Hadi Putranto 2105100163 Latar Belakang Dalam kehidupan sehari-hari,
JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: ( Print) F-313
 ISSN: ( Print) F-313") JURNAL TEKNIK ITS Vol. 6, No. 2, (217) ISSN: 2337-3539 (231-9271 Print) F-313 Studi Eksperimen Respon Reduksi Getaran Translasi dan Rotasi pada Sistem Utama dan Energy Density Mekanisme Cantilever Piezoelectric
JURNAL TEKNIK ITS Vol. 6, No. 2, (217) ISSN: 2337-3539 (231-9271 Print) F-313 Studi Eksperimen Respon Reduksi Getaran Translasi dan Rotasi pada Sistem Utama dan Energy Density Mekanisme Cantilever Piezoelectric
ANALISA DYNAMIC OF HANDLING KENDARAAN REVERSE TRIKE DITINJAU DARI PERGESERAN CENTRE OF GRAVITY (CG) SKRIPSI
 SKRIPSI") ANALISA DYNAMIC OF HANDLING KENDARAAN REVERSE TRIKE DITINJAU DARI PERGESERAN CENTRE OF GRAVITY (CG) SKRIPSI Diajukan sebagai salah satu syarat untuk memperoleh gelar SarjanaTeknik Oleh: BHANU PUTRA BUMI
ANALISA DYNAMIC OF HANDLING KENDARAAN REVERSE TRIKE DITINJAU DARI PERGESERAN CENTRE OF GRAVITY (CG) SKRIPSI Diajukan sebagai salah satu syarat untuk memperoleh gelar SarjanaTeknik Oleh: BHANU PUTRA BUMI
EFEK REDAMAN PADA SIMULASI KONVERVI ENERGI GELOMBANG LAUT MENJADI ENERGI LISTRIK DENGAN PRINSIP RESONANASI. Oleh
 EFEK REDAMAN PADA SIMULASI KONVERVI ENERGI GELOMBANG LAUT MENJADI ENERGI LISTRIK DENGAN PRINSIP RESONANASI Oleh Drs. Defrianto, DEA Jurusan Fisika Fmipa UNRI Abstrak Sistem mekanik yang terdiri dari tabung,
EFEK REDAMAN PADA SIMULASI KONVERVI ENERGI GELOMBANG LAUT MENJADI ENERGI LISTRIK DENGAN PRINSIP RESONANASI Oleh Drs. Defrianto, DEA Jurusan Fisika Fmipa UNRI Abstrak Sistem mekanik yang terdiri dari tabung,
Studi Eksperimental Sistem Suspensi Sebagai Komponen Pengganti (Interchange) Sistem Suspensi Mobil Multiguna Pedesaan GEA
 Sistem Suspensi Mobil Multiguna Pedesaan GEA") JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) 1 Studi Eksperimental Sistem Suspensi Sebagai Komponen Pengganti (Interchange) Sistem Suspensi Mobil Multiguna Pedesaan GEA
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) 1 Studi Eksperimental Sistem Suspensi Sebagai Komponen Pengganti (Interchange) Sistem Suspensi Mobil Multiguna Pedesaan GEA
BAB I PENDAHULUAN. mengurangi getaran yang terjadi pada body kendaraan akibat ketidakrataan dari
 1 BAB I PENDAHULUAN A. Latar Belakang Masalah Tingkat kenyamanan kendaraan sangat erat hubungannya dengan sistem suspensi kendaraan. Sistem suspensi kendaraan harus mampu mengisolasi atau mengurangi getaran
1 BAB I PENDAHULUAN A. Latar Belakang Masalah Tingkat kenyamanan kendaraan sangat erat hubungannya dengan sistem suspensi kendaraan. Sistem suspensi kendaraan harus mampu mengisolasi atau mengurangi getaran
Pemodelan dan Analisa Getaran Mesin Bensin 650 cc 2 Silinder Segaris dengan Sudut Engkol 180 untuk Rubber Mount
 Sidang Tugas Akhir Bidang Studi : Desain Pemodelan dan Analisa Getaran Mesin Bensin 65 cc Silinder Segaris dengan Sudut Engkol 8 untuk Rubber Mount Disusun Oleh: Mela Agus Christianti NRP. 9 36 Dosen Pembimbing:
Sidang Tugas Akhir Bidang Studi : Desain Pemodelan dan Analisa Getaran Mesin Bensin 65 cc Silinder Segaris dengan Sudut Engkol 8 untuk Rubber Mount Disusun Oleh: Mela Agus Christianti NRP. 9 36 Dosen Pembimbing:
ANALISIS STRUKTURAL PERFORMA CHASSIS SAPUANGIN SPEED Oleh : Muhammad Fadlil Adhim
 ANALISIS STRUKTURAL PERFORMA CHASSIS SAPUANGIN SPEED 2013 Oleh : Muhammad Fadlil Adhim 2110100703 Latar Belakang Partisipasi ITS Team Sapuangin di ajang Student Formula Japan 2013 BAGIAN YANG ENGINE MENENTUKAN
ANALISIS STRUKTURAL PERFORMA CHASSIS SAPUANGIN SPEED 2013 Oleh : Muhammad Fadlil Adhim 2110100703 Latar Belakang Partisipasi ITS Team Sapuangin di ajang Student Formula Japan 2013 BAGIAN YANG ENGINE MENENTUKAN
Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin Speed 3
 JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: 2337-3539 (2301-9271 Print) F-301 Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin
JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: 2337-3539 (2301-9271 Print) F-301 Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin
ANALISIS KESTABILAN KENDARAAN MINI TRUCK SANG SURYA PADA SAAT PENGEREMAN
 ANALISIS KESTABILAN KENDARAAN MINI TRUCK SANG SURYA PADA SAAT PENGEREMAN NASKAH PUBLIKASI Disusun oleh : ANA LANGGENG PURNOMO D200 08 0129 JURUSAN TEKNIK MESIN FAKULTAS TEKNIK UNIVERSITAS MUHAMMADIYAH
ANALISIS KESTABILAN KENDARAAN MINI TRUCK SANG SURYA PADA SAAT PENGEREMAN NASKAH PUBLIKASI Disusun oleh : ANA LANGGENG PURNOMO D200 08 0129 JURUSAN TEKNIK MESIN FAKULTAS TEKNIK UNIVERSITAS MUHAMMADIYAH
INTERFERENSI GELOMBANG
 INERFERENSI GELOMBANG Gelombang merupakan perambatan dari getaran. Perambatan gelombang tidak disertai dengan perpindahan materi-materi medium perantaranya. Gelombang dalam perambatannya memindahkan energi.
INERFERENSI GELOMBANG Gelombang merupakan perambatan dari getaran. Perambatan gelombang tidak disertai dengan perpindahan materi-materi medium perantaranya. Gelombang dalam perambatannya memindahkan energi.
ANALISIS GETARAN PADA SISTEM SUSPENSI KENDARAAN RODA DUA (YAMAHA JUPITER Z 2004) MENGGUNAKAN SIMULASI SOFTWARE MATLAB 6.5
 MENGGUNAKAN SIMULASI SOFTWARE MATLAB 6.5") TUGAS AKHIR ANALISIS GETARAN PADA SISTEM SUSPENSI KENDARAAN RODA DUA (YAMAHA JUPITER Z 2004) MENGGUNAKAN SIMULASI SOFTWARE MATLAB 6.5 Diajukan Untuk Memenuhi Tugas Dan Syarat-Syarat Guna Memperoleh Gelar
TUGAS AKHIR ANALISIS GETARAN PADA SISTEM SUSPENSI KENDARAAN RODA DUA (YAMAHA JUPITER Z 2004) MENGGUNAKAN SIMULASI SOFTWARE MATLAB 6.5 Diajukan Untuk Memenuhi Tugas Dan Syarat-Syarat Guna Memperoleh Gelar
Pembimbing : Dr. Eng. Harus Laksana Guntur, ST, M.Eng
 STUDI EKSPERIMENTAL KARAKTERISTIK MODEL REGENERATIVE SHOCK ABSORBER (RSA) UNTUK KENDARAAN TEMPUR RODA RANTAI -Senin, 16 Juli 212- MOHAMMAD CHOLIQ 218 1 58 Pembimbing : Dr. Eng. Harus Laksana Guntur, ST,
STUDI EKSPERIMENTAL KARAKTERISTIK MODEL REGENERATIVE SHOCK ABSORBER (RSA) UNTUK KENDARAAN TEMPUR RODA RANTAI -Senin, 16 Juli 212- MOHAMMAD CHOLIQ 218 1 58 Pembimbing : Dr. Eng. Harus Laksana Guntur, ST,
PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD
 1 PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Bagus Kusuma Ruswandiri, dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi
1 PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Bagus Kusuma Ruswandiri, dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi
PRESENTASI TUGAS AKHIR TM
 PRESENTASI TUGAS AKHIR TM-091486 RANCANG BANGUN DAN KAJIAN SUSPENSI UNMANNED GROUND VEHICLE (UGV) Disusun oleh: Nungki Ramadhani B. NRP. 2107100032 Dosen Pembimbing: Hendro Nurhadi Dipl-Ing., P.hD LATAR
PRESENTASI TUGAS AKHIR TM-091486 RANCANG BANGUN DAN KAJIAN SUSPENSI UNMANNED GROUND VEHICLE (UGV) Disusun oleh: Nungki Ramadhani B. NRP. 2107100032 Dosen Pembimbing: Hendro Nurhadi Dipl-Ing., P.hD LATAR
PEMODELAN DAN ANALISA GETARAN MOTOR BENSIN 4 LANGKAH 2 SILINDER 650CC SEGARIS DENGAN SUDUT ENGKOL 90 UNTUK RUBBER MOUNT
 JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1 PEMODELAN DAN ANALISA GETARAN MOTOR BENSIN 4 LANGKAH 2 SILINDER 650CC SEGARIS DENGAN SUDUT ENGKOL 90 UNTUK RUBBER MOUNT Siti Nafaati dan Harus
JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1 PEMODELAN DAN ANALISA GETARAN MOTOR BENSIN 4 LANGKAH 2 SILINDER 650CC SEGARIS DENGAN SUDUT ENGKOL 90 UNTUK RUBBER MOUNT Siti Nafaati dan Harus
APLIKASI METODE FUNGSI TRANSFER PADA ANALISIS KARAKTERISTIK GETARAN BALOK KOMPOSIT (BAJA DAN ALUMINIUM) DENGAN SISTEM TUMPUAN SEDERHANA
 DENGAN SISTEM TUMPUAN SEDERHANA") APLIKASI METODE UNGSI TRANSER PADA ANALISIS KARAKTERISTIK GETARAN BALOK KOMPOSIT (BAJA DAN ALUMINIUM) DENGAN SISTEM TUMPUAN SEDERHANA Naharuddin, Abdul Muis Laboratorium Bahan Teknik, Jurusan Teknik Mesin
APLIKASI METODE UNGSI TRANSER PADA ANALISIS KARAKTERISTIK GETARAN BALOK KOMPOSIT (BAJA DAN ALUMINIUM) DENGAN SISTEM TUMPUAN SEDERHANA Naharuddin, Abdul Muis Laboratorium Bahan Teknik, Jurusan Teknik Mesin
BAB I PENDAHULUAN 1.1. LATAR BELAKANG
 1 BAB I PENDAHULUAN 1.1. LATAR BELAKANG Penyediaan energi dimasa depan merupakan permasalahan yang senantiasa menjadi perhatian semua bangsa, karena bagaimanapun juga kesejahteraan manusia dalam kehidupan
1 BAB I PENDAHULUAN 1.1. LATAR BELAKANG Penyediaan energi dimasa depan merupakan permasalahan yang senantiasa menjadi perhatian semua bangsa, karena bagaimanapun juga kesejahteraan manusia dalam kehidupan
KARAKTERISTIK TRAKSI DAN KINERJA TRANSMISI PADA SISTEM GEAR TRANSMISSION DAN GEARLESS TRANSMISSION
 KARAKTERISTIK TRAKSI DAN KINERJA TRANSMISI PADA SISTEM GEAR TRANSMISSION DAN GEARLESS TRANSMISSION I G N P Tenaya dan I Ketut Adi Atmika Staf pengajar PST. Mesin Fakultas Teknik Universitas Udayana ABSTRAK
KARAKTERISTIK TRAKSI DAN KINERJA TRANSMISI PADA SISTEM GEAR TRANSMISSION DAN GEARLESS TRANSMISSION I G N P Tenaya dan I Ketut Adi Atmika Staf pengajar PST. Mesin Fakultas Teknik Universitas Udayana ABSTRAK
PERANCANGAN KARAKTERISTIK SISTEM SUSPENSI SEMI AKTIF UNTUK MENINGKATKAN KENYAMANAN KENDARAAN
 Volume 0 Nomor, September 0 PERANCANGAN KARAKTERISTIK SISTEM SUSPENSI SEMI AKTIF UNTUK MENINGKATKAN KENYAMANAN KENDARAAN Wibowo Staff Pengajar - Jurusan Teknik Mesin Fakultas Teknik UNS Keywords : Semi
Volume 0 Nomor, September 0 PERANCANGAN KARAKTERISTIK SISTEM SUSPENSI SEMI AKTIF UNTUK MENINGKATKAN KENYAMANAN KENDARAAN Wibowo Staff Pengajar - Jurusan Teknik Mesin Fakultas Teknik UNS Keywords : Semi
Analisa Perilaku Gerak Belok Mobil Listrik ITS 1
 JURNAL TEKNIK POMITS Vol. 1, No. 2, (212) ISSN: 231-9271 1 Analisa Perilaku Gerak Belok Mobil Listrik ITS 1 Pradana Setia B.L dan Unggul Wasiwitono Jurusan Teknik Mesin ITS, Fakultas Teknologi Industri,
JURNAL TEKNIK POMITS Vol. 1, No. 2, (212) ISSN: 231-9271 1 Analisa Perilaku Gerak Belok Mobil Listrik ITS 1 Pradana Setia B.L dan Unggul Wasiwitono Jurusan Teknik Mesin ITS, Fakultas Teknologi Industri,
STUDI KARAKTERISTIK ENERGI YANG DIHASILKAN MEKANISME PEMBANGKIT SINYAL LISTRIK AKIBAT BEBAN IMPAK DENGAN METODE PIEZOELECTRIC
 STUDI KARAKTERISTIK ENERGI YANG DIHASILKAN MEKANISME PEMBANGKIT SINYAL LISTRIK AKIBAT BEBAN IMPAK DENGAN METODE PIEZOELECTRIC Alain irjik Program Sarjana Jurusan Teknik Mesin, Institut Teknologi Sepuluh
STUDI KARAKTERISTIK ENERGI YANG DIHASILKAN MEKANISME PEMBANGKIT SINYAL LISTRIK AKIBAT BEBAN IMPAK DENGAN METODE PIEZOELECTRIC Alain irjik Program Sarjana Jurusan Teknik Mesin, Institut Teknologi Sepuluh
Karakteristik Gerak Harmonik Sederhana
 Pertemuan GEARAN HARMONIK Kelas XI IPA Karakteristik Gerak Harmonik Sederhana Rasdiana Riang, (5B0809), Pendidikan Fisika PPS UNM Makassar 06 Beberapa parameter yang menentukan karaktersitik getaran: Amplitudo
Pertemuan GEARAN HARMONIK Kelas XI IPA Karakteristik Gerak Harmonik Sederhana Rasdiana Riang, (5B0809), Pendidikan Fisika PPS UNM Makassar 06 Beberapa parameter yang menentukan karaktersitik getaran: Amplitudo
KARAKTERISTIK GERAK HARMONIK SEDERHANA
 KARAKTERISTIK GERAK HARMONIK SEDERHANA Pertemuan 2 GETARAN HARMONIK Kelas XI IPA Karakteristik Gerak Harmonik Sederhana Rasdiana Riang, (15B08019), Pendidikan Fisika PPS UNM Makassar 2016 Beberapa parameter
KARAKTERISTIK GERAK HARMONIK SEDERHANA Pertemuan 2 GETARAN HARMONIK Kelas XI IPA Karakteristik Gerak Harmonik Sederhana Rasdiana Riang, (15B08019), Pendidikan Fisika PPS UNM Makassar 2016 Beberapa parameter
Studi dan Simulasi Getaran pada Turbin Vertikal Aksis Arus Sungai
 JURNAL TEKNIK POMITS Vol, No, () -6 Studi dan Simulasi Getaran pada Turbin Vertikal Aksis Arus Sungai Anas Khoir, Yerri Susatio, Ridho Hantoro Teknik Fisika, Fakultas Teknologi Industri, Institut Teknologi
JURNAL TEKNIK POMITS Vol, No, () -6 Studi dan Simulasi Getaran pada Turbin Vertikal Aksis Arus Sungai Anas Khoir, Yerri Susatio, Ridho Hantoro Teknik Fisika, Fakultas Teknologi Industri, Institut Teknologi
Perancangan Electric Energy Recovery System Pada Sepeda Listrik
 JURNAL TEKNIK POMITS Vol. 1, No. 1, (01) 1-5 1 Perancangan Electric Energy Recovery System Pada Sepeda Listrik Andhika Iffasalam dan Prof. Ir. I Nyoman Sutantra M.Sc PhD Jurusan Teknik Mesin, Fakultas
JURNAL TEKNIK POMITS Vol. 1, No. 1, (01) 1-5 1 Perancangan Electric Energy Recovery System Pada Sepeda Listrik Andhika Iffasalam dan Prof. Ir. I Nyoman Sutantra M.Sc PhD Jurusan Teknik Mesin, Fakultas
PEMODELAN NUMERIK RESPON DINAMIK STRUKTUR TURBIN ANGIN AKIBAT PEMBEBANAN GELOMBANG AIR DAN ANGIN
 PEMODELAN NUMERIK RESPON DINAMIK STRUKTUR TURBIN ANGIN AKIBAT PEMBEBANAN GELOMBANG AIR DAN ANGIN Medianto NRP : 0321050 Pembimbing : Olga Pattipawaej, Ph.D FAKULTAS TEKNIK JURUSAN TEKNIK SIPIL UNIVERSITAS
PEMODELAN NUMERIK RESPON DINAMIK STRUKTUR TURBIN ANGIN AKIBAT PEMBEBANAN GELOMBANG AIR DAN ANGIN Medianto NRP : 0321050 Pembimbing : Olga Pattipawaej, Ph.D FAKULTAS TEKNIK JURUSAN TEKNIK SIPIL UNIVERSITAS
PARAMETER SUDUT BELOK RODA PADA KENDARAAN DENGAN SISTEM KEMUDI EMPAT RODA
 209 PARAMETER SUDUT BELOK RODA PADA KENDARAAN DENGAN SISTEM KEMUDI EMPAT RODA Wibowo 1 1 Staf Pengajar Jurusan Teknik Mesin Universitas Sebelas Maret Keywords : Two wheel steering Four wheel steering Steer
209 PARAMETER SUDUT BELOK RODA PADA KENDARAAN DENGAN SISTEM KEMUDI EMPAT RODA Wibowo 1 1 Staf Pengajar Jurusan Teknik Mesin Universitas Sebelas Maret Keywords : Two wheel steering Four wheel steering Steer
STUDI NUMERIK RESPON GETARAN MESIN BENSIN DUA SILINDER SEGARIS DENGAN VARIASI SUDUT ANTAR ENGKOL
 Jurnal SIMETRIS, Vol. 9 No. April 8 ISSN: 5-98 STUDI NUMERIK RESPON GETARAN MESIN BENSIN DUA SILINDER SEGARIS DENGAN VARIASI SUDUT ANTAR ENGKOL Hendri Suryanto Jurusan Teknik Mesin Sekolah Tinggi Teknologi
Jurnal SIMETRIS, Vol. 9 No. April 8 ISSN: 5-98 STUDI NUMERIK RESPON GETARAN MESIN BENSIN DUA SILINDER SEGARIS DENGAN VARIASI SUDUT ANTAR ENGKOL Hendri Suryanto Jurusan Teknik Mesin Sekolah Tinggi Teknologi
Pengaruh Variasi Konstanta Pegas dan Massa Roller CVT Terhadap Performa Honda Vario 150 cc
 E1 Pengaruh Variasi Konstanta Pegas dan Massa Roller CVT Terhadap Performa Honda Vario 150 cc Irvan Ilmy dan I Nyoman Sutantra Departemen Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
E1 Pengaruh Variasi Konstanta Pegas dan Massa Roller CVT Terhadap Performa Honda Vario 150 cc Irvan Ilmy dan I Nyoman Sutantra Departemen Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
Jurnal Jurusan Pendidikan Teknik Mesin (JJPTM) Vol: 8 No: 2 Tahun: 2017
 Vol: 8 No: 2 Tahun: 2017") Analisis Stabilitas Belok Rancangan Kendaraan Ganesha Sakti (Gaski) Berpenggerak Differential Motor Brushless DC Menggunakan Metode Kalkulasi Quasi Dinamik Berbasis Software Microsoft Visual Studio C#
Analisis Stabilitas Belok Rancangan Kendaraan Ganesha Sakti (Gaski) Berpenggerak Differential Motor Brushless DC Menggunakan Metode Kalkulasi Quasi Dinamik Berbasis Software Microsoft Visual Studio C#
Abstrak. Kata kunci : balance performance, massa unbalance, balancing roda mobil, metoda sudut fasa
 STUDI EKSPERIMENTAL PENGARUH BERAT RODA PADA PROSENTASE UNJUK KERJA BALANCING RODA MOBIL Harie Satiyadi Jaya *, Suhardjono ** Laboratorium Mesin Perkakas, Jurusan Teknik Mesin FTI ITS, Surabaya. E-mail:
STUDI EKSPERIMENTAL PENGARUH BERAT RODA PADA PROSENTASE UNJUK KERJA BALANCING RODA MOBIL Harie Satiyadi Jaya *, Suhardjono ** Laboratorium Mesin Perkakas, Jurusan Teknik Mesin FTI ITS, Surabaya. E-mail:
ANALISA PENGARUH TEBAL DAN GEOMETRI SPOKE BERBENTUK BELAH KETUPAT PADA BAN TANPA UDARA TERHADAP KEKAKUAN RADIAL DAN LATERAL
 JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) 1 ANALISA PENGARUH TEBAL DAN GEOMETRI SPOKE BERBENTUK BELAH KETUPAT PADA BAN TANPA UDARA TERHADAP KEKAKUAN RADIAL DAN LATERAL
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) 1 ANALISA PENGARUH TEBAL DAN GEOMETRI SPOKE BERBENTUK BELAH KETUPAT PADA BAN TANPA UDARA TERHADAP KEKAKUAN RADIAL DAN LATERAL
RANCANG BANGUN STRUKTUR RANGKA KENDARAAN HYBRID RODA TIGA
 1 RANCANG BANGUN STRUKTUR RANGKA KENDARAAN HYBRID RODA TIGA Agil Erbiansyah dan Prof. Ir. I Nyoman Sutantra M.Sc.,Ph.D. Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
1 RANCANG BANGUN STRUKTUR RANGKA KENDARAAN HYBRID RODA TIGA Agil Erbiansyah dan Prof. Ir. I Nyoman Sutantra M.Sc.,Ph.D. Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
STUDI EFEKTIFITAS PENGGUNAAN TUNED MASS DAMPER UNTUK MENGURANGI PENGARUH BEBAN GEMPA PADA STRUKTUR BANGUNAN TINGGI DENGAN LAYOUT BANGUNAN BERBENTUK U
 VOLUME 5 NO. 2, OKTOBER 29 STUDI EFEKTIFITAS PENGGUNAAN TUNED MASS DAMPER UNTUK MENGURANGI PENGARUH BEBAN GEMPA PADA STRUKTUR BANGUNAN TINGGI DENGAN LAYOUT BANGUNAN BERBENTUK U Jati Sunaryati 1, Rudy Ferial
VOLUME 5 NO. 2, OKTOBER 29 STUDI EFEKTIFITAS PENGGUNAAN TUNED MASS DAMPER UNTUK MENGURANGI PENGARUH BEBAN GEMPA PADA STRUKTUR BANGUNAN TINGGI DENGAN LAYOUT BANGUNAN BERBENTUK U Jati Sunaryati 1, Rudy Ferial
PENDAHULUAN LATAR BELAKANG
 TUGAS AKHIR Studi Eksperimen Karakteristik Redaman dan Energi Bangkitan dari Hydraulic Electro Mechanic Shock Absorber (HEMSA) Dua Selang Compression Satu Selang Rebound dengan Variasi Pembebanan Listrik
TUGAS AKHIR Studi Eksperimen Karakteristik Redaman dan Energi Bangkitan dari Hydraulic Electro Mechanic Shock Absorber (HEMSA) Dua Selang Compression Satu Selang Rebound dengan Variasi Pembebanan Listrik
PEMODELAN KANAL KOMUNIKASI AKUSTIK PADA PERAIRAN DANGKAL
 PEMODELAN KANAL KOMUNIKASI AKUSTIK PADA PERAIRAN DANGKAL Taufani Rizal Nofriansyah NRP. 2207 100 004 Dosen Pembimbing : Dr. Ir. Wirawan, DEA Ir. Endang Widjiati, M.Eng.Sc Latar Belakang Kondisi perairan
PEMODELAN KANAL KOMUNIKASI AKUSTIK PADA PERAIRAN DANGKAL Taufani Rizal Nofriansyah NRP. 2207 100 004 Dosen Pembimbing : Dr. Ir. Wirawan, DEA Ir. Endang Widjiati, M.Eng.Sc Latar Belakang Kondisi perairan
Oleh : Bimo Arindra Hapsara Dosen Pembimbing : Ir. J. Lubi. Proposal Tugas Akhir. Tugas Akhir
 Proposal Tugas Akhir Tugas Akhir Oleh : Bimo Arindra Hapsara 2106 100 047 Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kecelakaan
Proposal Tugas Akhir Tugas Akhir Oleh : Bimo Arindra Hapsara 2106 100 047 Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kecelakaan
Uji Kompetensi Semester 1
 A. Pilihlah jawaban yang paling tepat! Uji Kompetensi Semester 1 1. Sebuah benda bergerak lurus sepanjang sumbu x dengan persamaan posisi r = (2t 2 + 6t + 8)i m. Kecepatan benda tersebut adalah. a. (-4t
A. Pilihlah jawaban yang paling tepat! Uji Kompetensi Semester 1 1. Sebuah benda bergerak lurus sepanjang sumbu x dengan persamaan posisi r = (2t 2 + 6t + 8)i m. Kecepatan benda tersebut adalah. a. (-4t
PENGATURAN PARAMETER dan DESAIN ABSORBER DINAM GETARAN AKIBAT GERAKAN PERMUKAAN TANAH
 PENGATURAN PARAMETER dan DESAIN ABSORBER DINAMIK SEBAGAI PEREDAM GETARAN AKIBAT GERAKAN PERMUKAAN TANAH Magister Student of Mathematics Department FMIPA- I T S, Surabaya August 5, 2010 Abstrak Dynamic
PENGATURAN PARAMETER dan DESAIN ABSORBER DINAMIK SEBAGAI PEREDAM GETARAN AKIBAT GERAKAN PERMUKAAN TANAH Magister Student of Mathematics Department FMIPA- I T S, Surabaya August 5, 2010 Abstrak Dynamic
Antiremed Kelas 11 FISIKA
 Antiremed Kelas 11 FISIKA Gerak Harmonis - Soal Doc Name: K1AR11FIS0401 Version : 014-09 halaman 1 01. Dalam getaran harmonik, percepatan getaran (A) selalu sebanding dengan simpangannya tidak bergantung
Antiremed Kelas 11 FISIKA Gerak Harmonis - Soal Doc Name: K1AR11FIS0401 Version : 014-09 halaman 1 01. Dalam getaran harmonik, percepatan getaran (A) selalu sebanding dengan simpangannya tidak bergantung