Oleh : Bimo Arindra Hapsara Dosen Pembimbing : Ir. J. Lubi. Proposal Tugas Akhir. Tugas Akhir
|
|
|
- Bambang Tan
- 6 tahun lalu
- Tontonan:
Transkripsi




1 Proposal Tugas Akhir Tugas Akhir Oleh : Bimo Arindra Hapsara Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember




2 Kecelakaan Transportasi Keamanan dan Kenyamanan


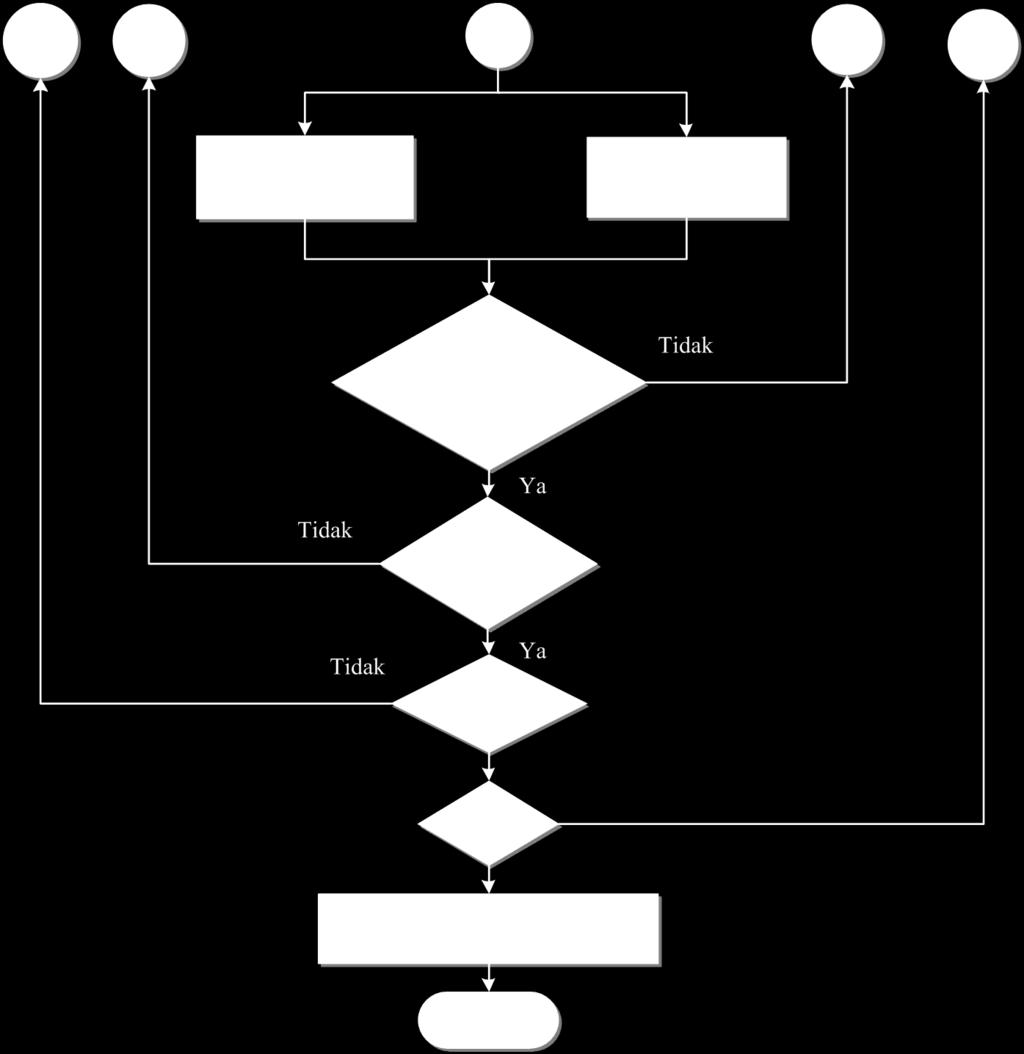
3 Analisa tentang kestabilan Apakah terjadi skid Apakah akan guling
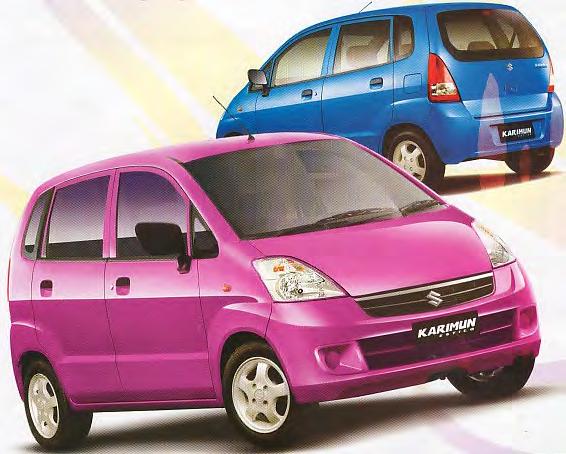
4 1. Kendaraan yang dianalisa adalah Suzuki Karimun Estilo 2. Gaya angkat / lift diabaikan 3. Analisa dilakukan dengan variasi kecepatan 20, 40, 60, 80 dan 100 km/jam 4. Jalan yang dilalui aspal kering, tidak bergelombang/rata 5. Kemiringan jalan disesuaikan pada data Bina Marga 6. Efek gaya angin dari samping diabaikan 7. Berat masing-masing penumpang 60 kg Sumber : TPGJAK No 038/T/BM/ Kapasitas maksimal 4 orang penumpang
5 Mengetahui arah dan gaya kendaraan saat berbelok Mengetahui kapan kendaraan akan terguling
6 Membatasi kecepatan Media pengembangan dan penelitian Memenuhi kebutuhan yang aman dan nyaman
7 Dasar Teori Stabilitas Arah Kendaraan Perilaku arah kendaraan menggambarkan stabilitas arah kendaraan Karakter handling baik (stabil) jika arah gerak kendaraan hanya dipengaruhi oleh arah sudut belok roda kemudi Sudut slip pada roda mengurangi stabilitas arah gerak kendaraan Sudut slip roda akan menentukan jenis perilaku arah gerak kendaraan Perilaku Ackerman Perilaku Netral
8 Kondisi Ideal Kondisi Nyata

9 Understreer sudut slip rata-rata roda depan lebih besar dari pada sudut slip rata-rata roda belakang (α r < α f )

10 Overstreer Sudut slip rata-rata roda belakang lebih besar dibandingkan dengan sudut slip rata-rata roda depan (α f < α r )

11



12 Prosesn Penimbangan x Wf (beban roda depan akibat (jarak poros ke tanah) pengangkatan roda belakang) 37 cm 540 kg
13

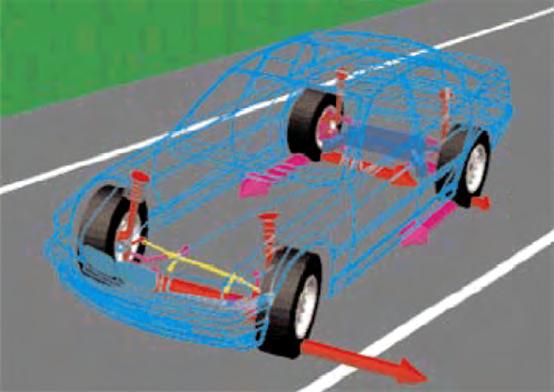
14 Gaya Berat Fz Gaya Sentrifugal Momen Rolling

15 Gaya Berat Fz Gaya Sentrifugal Momen Rolling

16 Fz Gaya Sentrifugal Drag Force Momen Pitching RODA DEPAN RODA BELAKANG


17 Perubahan Lokasi Center of Grafity


18 Depan Depan Belakang Belakang Depan Depan Belakang Belakang Jumlah a (meter) b (meter) Penumpang 1 0,868 1, ,972 1, ,040 1, ,601 1,298
19 Lateral Transfer Load
 Gaya Lateral (F y ) Gaya Normal (F z ) Tekanan Ban (P) Keausan Ban (A) Gaya")
20 Sudut Slip KENDARAAN BELOK GAYA SENTRIFUGAL DEFORMASI PADA BAN SUDUT SLIP (α) Faktor yang mempengaruhi sudut slip: Konstruksi Ban Gaya Longitudinal (F x ) Gaya Lateral (F y ) Gaya Normal (F z ) Tekanan Ban (P) Keausan Ban (A) Gaya Sentrifugal (F c )

21
22
23 Dimensi panjang keseluruhan 3,495 m lebar keseluruhan 1,475 m tinggi keseluruhan 1,610 m jarak sumbu roda (L) 2,36 m jarak pijak roda depan (tf) 1,235 m jarak pijak roda belakang (tr) 1,23 m jarak terendah ke tanah 0,165 m radius putar 4,6 m jarak suspensi depan (bf) 0,82 m jarak suspensi belakang (br) 0,91 m Berat berat total (W) 890 kg berat depan (Wf) 530 kg berat belakang (Wr) 360 kg Suspensi depan McPherson Strut with Torsion Type Roll Control Device belakang Coil Spring, Gas Filled Shock Absorbers with 3-Link Rigid Axle and Isolated Trailing Arm koefisien pegas depan (kf) N/m koefisien pegas belakang (kr) N/m Chassis Steering Electric Power Steering Rem depan ventilated disc rem belakang drum Aerodinamik luas frontal (Af) 2,374 m2 massa jenis angin (ρ) 1,23 kg/m3 koefisien drag (Cd) 0,35 ban jenis radial jari-jari ban 13 inch / 330,2 mm
24 Fz 0 (N) δf 4, , , , Terguling V (km/jam) δf , , , , , ,02 6, ,64 838, ,8-4250, ,68 7, , , , , ,4 8, ,44 185, ,6-6860, ,7
25 Hubungan Penumpang Dengan Guling yang terjadi Fz vs V Kemiringan jalan 1,145 Grafik Batas kecepatan 1 Penumpang kemiringan Fz Grafik Batas kecepatan 3 Penumpang V (km/jam) kemiringan Grafik Batas kecepatan 2 Penumpang kemiringan Grafik Batas kecepatan 4 Penumpang kemiringan 1 4, , , ,
26 Penggabungan Grafik Kemiringan jalan 1,145 Sudut belok 6,009 Perbandingan Beberapa Penumpang Dengan Kecepatan dan Gaya Normal Fz (N) penumpang 2 penumpang 3 penumpang penumpang V (km/jam) δf Hampir tidak ada perbedaan pada 1, 2,3, dan 4 penumpang saat Fz = 0 6, , , , , ,83 6, ,64 838, ,8-4250, ,68 6, , , , , ,09 6, , , , , ,11
27 4 penumpang Sudut belok 6, δf , , , , ,38 6, , , , ,93 6, , , , ,92 6, , , , ,08 6, , , , ,45 Fz (N) 0 miring miring 2 miring V (km/jam) miring 4 miring 5 Miring 1 Guling < 50 km/jam Miring 5 Guling > 50 km/jam
28 α V= 60 km/jam; Ø=3,43 ; 2 penumpang Radius belok yang semakin besar mengakibatkan gaya sentrifugal yang dialami kendaraan makin besar 0 4 4,5 5 5,5 6 6,5 7 7,5 8 8,5 9 rata-rata roda depan δf rata-rata roda belakang Sudut steering besar Sudut slip besar δ f α α f α α1 α2 α3 α4 r 4, , , , , , , , , , , , , , , , , , , , , , , , , , , ,


29 α α 1 0,8 0,6 0,4 0, V= 20 km/jam; Ø=1,145 ; 2 penumpang 4 4,5 5 5,5 6 6,5 7 7,5 8 8,5 9 δf V= 40 km/jam; Ø=1,145 ; 2 penumpang Kecepatan 20 km/jam belum terjadi slip Kecepatan 40 km/jam sudah terjadi slip 0 4 4,5 5 5,5 6 6,5 7 7,5 8 8,5 9 rata-rata roda depan δf rata-rata roda belakang δ f α α1 α2 α3 α4 4, , , , , , , , , , , , , , , , , , , ,35013


30 V= 60 km/jam; Ø=3,43 ; 1 penumpang V= 60 km/jam; Ø=3,43 ; 2 penumpang α α ,5 5 5,5 6 6,5 7 7,5 8 8, ,5 5 5,5 6 6,5 7 7,5 8 8,5 9 δf δf rata-rata roda depan rata-rata roda belakang rata-rata roda depan rata-rata roda belakang V= 60 km/jam; Ø=3,43 ; 3 penumpang V= 60 km/jam; Ø=3,43 ; 4 penumpang α α ,5 5 5,5 6 6,5 7 7,5 8 8, ,5 5 5,5 6 6,5 7 7,5 8 8,5 9 δf δf rata-rata roda depan rata-rata roda belakang rata-rata roda depan rata-rata roda belakang
31 Jumlah Penumpang δf αf αr αf αr αf αr αf αr 4, , , , , , , , , , , , , , , , , , , ,938 4, , , , , , , , ,6180 5, , , , , , ,91371 Semakin banyak penumpang Gaya sentrifugal membesar



32 Semakin besar sudut steer yang diberikan oleh pengemudi, maka sudut slip yang terjadi juga menjadi semakin besar. Gaya sentrifugal yang besar mengakibatkan munculnya gaya lateral yang dapat mendorong roda ke arah samping Semakin besar kecepatan belok, maka sudut slip yang terbentuk akan semakin besar. Untuk mengetahui batas kecepatan kendaraan guling dapat dilihat pada grafik pada halaman 61 dengan variasi sudut belok, penumpang, dan kemiringan jalan.

33
Analisis Stabilitas Arah Mobil Toyota Agya G dengan Variasi Jumlah Penumpang, Kecepatan Belok, Sudut Belok dan Kemiringan Melintang Jalan
 JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2301-9271 A-35 Analisis Stabilitas Arah Mobil Toyota Agya G dengan Variasi Jumlah Penumpang, Kecepatan Belok, Sudut Belok dan Kemiringan Melintang Jalan Faisal
JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2301-9271 A-35 Analisis Stabilitas Arah Mobil Toyota Agya G dengan Variasi Jumlah Penumpang, Kecepatan Belok, Sudut Belok dan Kemiringan Melintang Jalan Faisal
PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD
 PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Oleh: Bagus Kusuma Ruswandiri 2108100120 Dosen Pembimbing: Prof. Ir. I Nyoman Sutantra, M.Sc., Ph.D. Latar Belakang
PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Oleh: Bagus Kusuma Ruswandiri 2108100120 Dosen Pembimbing: Prof. Ir. I Nyoman Sutantra, M.Sc., Ph.D. Latar Belakang
Rizqi An Naafi Dosen Pembimbing: Ir. J. Lubi
 Analisa Perilaku Arah Mobil GEA pada Jalan Belok Menurun dengan Variasi Kecepatan, Berat Muatan, Sudut Kemiringan Melintang, Sudut Turunan Jalan dan Radius Belok Jalan Rizqi An Naafi 2109 100 035 Dosen
Analisa Perilaku Arah Mobil GEA pada Jalan Belok Menurun dengan Variasi Kecepatan, Berat Muatan, Sudut Kemiringan Melintang, Sudut Turunan Jalan dan Radius Belok Jalan Rizqi An Naafi 2109 100 035 Dosen
PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD
 1 PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Bagus Kusuma Ruswandiri, dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi
1 PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Bagus Kusuma Ruswandiri, dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi
Analisis dan Pengujian Stabilitas Saat Kondisi Berbelok pada Kendaraan Bermotor Roda Tiga sebagai Alat Bantu Transportasi bagi Penyandang Disabilitas
 Analisis dan Pengujian Stabilitas Saat Kondisi Berbelok pada Kendaraan Bermotor Roda Tiga sebagai Alat Bantu Transportasi bagi Penyandang Disabilitas Agus Setiawan 1, Wahyudi 2, Dhika Aditya P. 3 1 Program
Analisis dan Pengujian Stabilitas Saat Kondisi Berbelok pada Kendaraan Bermotor Roda Tiga sebagai Alat Bantu Transportasi bagi Penyandang Disabilitas Agus Setiawan 1, Wahyudi 2, Dhika Aditya P. 3 1 Program
JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1
 ISSN: 2301-9271 1") JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1 Analisa Kestabilan Arah pada Kendaraan Formula Sapu Angin Speed Berdasarkan Variasi Posisi Titik Berat, Kecepatan dan Tes Dinamik Student Formula
JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1 Analisa Kestabilan Arah pada Kendaraan Formula Sapu Angin Speed Berdasarkan Variasi Posisi Titik Berat, Kecepatan dan Tes Dinamik Student Formula
Jurnal Jurusan Pendidikan Teknik Mesin (JJPTM) Vol: 8 No: 2 Tahun: 2017
 Vol: 8 No: 2 Tahun: 2017") Analisis Stabilitas Belok Rancangan Kendaraan Ganesha Sakti (Gaski) Berpenggerak Differential Motor Brushless DC Menggunakan Metode Kalkulasi Quasi Dinamik Berbasis Software Microsoft Visual Studio C#
Analisis Stabilitas Belok Rancangan Kendaraan Ganesha Sakti (Gaski) Berpenggerak Differential Motor Brushless DC Menggunakan Metode Kalkulasi Quasi Dinamik Berbasis Software Microsoft Visual Studio C#
 Seminar Nasional Mesin Dan Industri (SNMI8) 2013 Riset Multidisiplin Untuk Menunjang Pengembangan Industri Nasional Jakarta, 14 November 2013 ANALISA PERILAKU GULING KENDARAAN TRUK ANGKUTAN BARANG (STUDI
Seminar Nasional Mesin Dan Industri (SNMI8) 2013 Riset Multidisiplin Untuk Menunjang Pengembangan Industri Nasional Jakarta, 14 November 2013 ANALISA PERILAKU GULING KENDARAAN TRUK ANGKUTAN BARANG (STUDI
TUGAS AKHIR JURUSAN TEKNIK MESIN FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER S U R A B A Y A 2006
 TUGAS AKHIR JURUSAN TEKNIK MESIN FAKUTAS TEKNOOGI INDUSTRI INSTITUT TEKNOOGI SEPUUH NOPEMBER S U R A B A Y A 2006 ANAISA PERBANDINGAN KESTABIAN BEOK DAN ARAH KENDARAAN ANTARA DAIHATSU XENIA TYPE 1.3 DEUXE(Xi)
TUGAS AKHIR JURUSAN TEKNIK MESIN FAKUTAS TEKNOOGI INDUSTRI INSTITUT TEKNOOGI SEPUUH NOPEMBER S U R A B A Y A 2006 ANAISA PERBANDINGAN KESTABIAN BEOK DAN ARAH KENDARAAN ANTARA DAIHATSU XENIA TYPE 1.3 DEUXE(Xi)
ANALISA DYNAMIC OF HANDLING KENDARAAN REVERSE TRIKE DITINJAU DARI PERGESERAN CENTRE OF GRAVITY (CG) SKRIPSI
 SKRIPSI") ANALISA DYNAMIC OF HANDLING KENDARAAN REVERSE TRIKE DITINJAU DARI PERGESERAN CENTRE OF GRAVITY (CG) SKRIPSI Diajukan sebagai salah satu syarat untuk memperoleh gelar SarjanaTeknik Oleh: BHANU PUTRA BUMI
ANALISA DYNAMIC OF HANDLING KENDARAAN REVERSE TRIKE DITINJAU DARI PERGESERAN CENTRE OF GRAVITY (CG) SKRIPSI Diajukan sebagai salah satu syarat untuk memperoleh gelar SarjanaTeknik Oleh: BHANU PUTRA BUMI
Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin Speed 3
 JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: 2337-3539 (2301-9271 Print) F-301 Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin
JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: 2337-3539 (2301-9271 Print) F-301 Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin
Analisa Perilaku Gerak Belok Mobil Listrik ITS 1
 JURNAL TEKNIK POMITS Vol. 1, No. 2, (212) ISSN: 231-9271 1 Analisa Perilaku Gerak Belok Mobil Listrik ITS 1 Pradana Setia B.L dan Unggul Wasiwitono Jurusan Teknik Mesin ITS, Fakultas Teknologi Industri,
JURNAL TEKNIK POMITS Vol. 1, No. 2, (212) ISSN: 231-9271 1 Analisa Perilaku Gerak Belok Mobil Listrik ITS 1 Pradana Setia B.L dan Unggul Wasiwitono Jurusan Teknik Mesin ITS, Fakultas Teknologi Industri,
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Gokart Gokart merupakan salah satu produk yang sarat dengan teknologi dan perkembangan. Ditnjau dari segi komponen, Gokart mempunyai beragam komponen didalamnya, namun secara
BAB II LANDASAN TEORI 2.1 Gokart Gokart merupakan salah satu produk yang sarat dengan teknologi dan perkembangan. Ditnjau dari segi komponen, Gokart mempunyai beragam komponen didalamnya, namun secara
Analisis Pengaruh Parameter Operasional Terhadap Perilaku Belok dan Stabilitas Pada Panser Anoa 6X6 APC
 JURNAL TEKNIK ITS Vol. 6, No. (7), 337-3 (-98X Print) E8 Analisis Pengaruh Parameter Operasional Terhadap Perilaku Belok dan Stabilitas Pada Panser Anoa 6X6 APC Sanditra Muda Yusviva dan I Nyoman Sutantra
JURNAL TEKNIK ITS Vol. 6, No. (7), 337-3 (-98X Print) E8 Analisis Pengaruh Parameter Operasional Terhadap Perilaku Belok dan Stabilitas Pada Panser Anoa 6X6 APC Sanditra Muda Yusviva dan I Nyoman Sutantra
Analisis Pengaruh Parameter Operasional Terhadap Perilaku Belok dan Stabilitas Pada Panser Anoa 6X6 APC
 JURNAL TEKNIK ITS Vol. 6, No., (7) ISSN: 337-3539 (3-97 Print) E-3 Analisis Pengaruh Parameter Operasional Terhadap Perilaku Belok dan Stabilitas Pada Panser Anoa 6X6 APC Sanditra Muda Yusviva dan I Nyoman
JURNAL TEKNIK ITS Vol. 6, No., (7) ISSN: 337-3539 (3-97 Print) E-3 Analisis Pengaruh Parameter Operasional Terhadap Perilaku Belok dan Stabilitas Pada Panser Anoa 6X6 APC Sanditra Muda Yusviva dan I Nyoman
BAB I PENDAHULUAN. mengetahui karakteristik dari kendaraan tersebut, baik secara. subyektif maupun obyektif. Penilaian secara subyektif kendaraan
 BAB I PENDAHULUAN 1.1. Latar Belakang Dalam memilih kendaraan, masyarakat hendaknya mengetahui karakteristik dari kendaraan tersebut, baik secara subyektif maupun obyektif. Penilaian secara subyektif kendaraan
BAB I PENDAHULUAN 1.1. Latar Belakang Dalam memilih kendaraan, masyarakat hendaknya mengetahui karakteristik dari kendaraan tersebut, baik secara subyektif maupun obyektif. Penilaian secara subyektif kendaraan
SUSPENSI (suspension)
") SUSPENSI (suspension) Suspensi adalah mekanisme yang dipasang di antara body dan roda yang berfungsi untuk menciptakan kestabilan kendaraan (nyaman dan aman) Unsur kestabilan kendaraan : 1. Stabil pengendaraannya
SUSPENSI (suspension) Suspensi adalah mekanisme yang dipasang di antara body dan roda yang berfungsi untuk menciptakan kestabilan kendaraan (nyaman dan aman) Unsur kestabilan kendaraan : 1. Stabil pengendaraannya
BAB III PERHITUNGAN BAGIAN-BAGIAN UTAMA
 BAB III PERHITUNGAN BAGIAN-BAGIAN UTAMA 3.1 Perancangan Sistem Kemudi Gokart Proses peracangan sistem kemudi gokart menggunakan metode analisa perancangan dengan melakukan perhitungan-perhitungan manual.
BAB III PERHITUNGAN BAGIAN-BAGIAN UTAMA 3.1 Perancangan Sistem Kemudi Gokart Proses peracangan sistem kemudi gokart menggunakan metode analisa perancangan dengan melakukan perhitungan-perhitungan manual.
Kata kunci: understeer, oversteer.
 1 ANALISA PERILAKU ARAH MOBIL GEA PADA LINTASAN BELOK MENURUN DENGAN VARIASI KECEPATAN, BERAT MUATAN, SUDUT KEMIRINGAN MELINTANG, SUDUT TURUNAN JALAN DAN RADIUS BELOK JALAN Rizqi An Naafi dan J. Lubi Jurusan
1 ANALISA PERILAKU ARAH MOBIL GEA PADA LINTASAN BELOK MENURUN DENGAN VARIASI KECEPATAN, BERAT MUATAN, SUDUT KEMIRINGAN MELINTANG, SUDUT TURUNAN JALAN DAN RADIUS BELOK JALAN Rizqi An Naafi dan J. Lubi Jurusan
Analisis Stabilitas dan Kekuatan Pengait Bak Angkut Kendaraan Multiguna Pedesaan
 JURNAL TEKNIK ITS Vol. 6, No. 2, (27) ISSN: 2337539 (23-927 Print) E4 Analisis Stabilitas dan Kekuatan Pengait Bak Angkut Kendaraan Multiguna Pedesaan Alfian Rafi Harsyawina dan I Nyoman Sutantra Departemen
JURNAL TEKNIK ITS Vol. 6, No. 2, (27) ISSN: 2337539 (23-927 Print) E4 Analisis Stabilitas dan Kekuatan Pengait Bak Angkut Kendaraan Multiguna Pedesaan Alfian Rafi Harsyawina dan I Nyoman Sutantra Departemen
ANALISIS KESTABILAN KENDARAAN MINI TRUCK SANG SURYA PADA SAAT MEMBELOK
 NASKAH PUBLIKASI KARYA ILMIAH ANALISIS KESTABILAN KENDARAAN MINI TRUCK SANG SURYA PADA SAAT MEMBELOK Disusun Untuk Memenuhi Sebagai Persyaratan Memperoleh Derajat Sarjana S1 pada Jurusan Teknik Mesin Fakultas
NASKAH PUBLIKASI KARYA ILMIAH ANALISIS KESTABILAN KENDARAAN MINI TRUCK SANG SURYA PADA SAAT MEMBELOK Disusun Untuk Memenuhi Sebagai Persyaratan Memperoleh Derajat Sarjana S1 pada Jurusan Teknik Mesin Fakultas
SATUAN ACARA PERKULIAHAN
 SATUAN ACARA PERKULIAHAN Kode & Nama Mata Kuliah : OT 443. CHASSIS OTOMOTIF Topik Bahasan : Kumpulan bahan kajian dan perkuliahan yang menjamin kendaraan berjalan dengan aman dan nyaman Tujuan / Kompetensi
SATUAN ACARA PERKULIAHAN Kode & Nama Mata Kuliah : OT 443. CHASSIS OTOMOTIF Topik Bahasan : Kumpulan bahan kajian dan perkuliahan yang menjamin kendaraan berjalan dengan aman dan nyaman Tujuan / Kompetensi
Analisa Sudut Belok Roda Belakang Sebagai Fungsi Sudut Belok Roda Depan dan Kecepatan pada Kendaraan Mini 4WS
 Analisa Sudut Belok Roda Belakang Sebagai Fungsi Sudut Belok Roda Depan dan Kecepatan pada Kendaraan Mini 4WS Yunarko Triwinarno Dosen Fakultas Teknologi Industri, Jurusan Teknik Mesin - Institut Teknologi
Analisa Sudut Belok Roda Belakang Sebagai Fungsi Sudut Belok Roda Depan dan Kecepatan pada Kendaraan Mini 4WS Yunarko Triwinarno Dosen Fakultas Teknologi Industri, Jurusan Teknik Mesin - Institut Teknologi
Sistem suspensi dipasang diantara rangka kendaraan dengan poros roda, supaya getaran atau goncangan yang terjadi tidak di teruskan ke body.
 SISTEM SUSPENSI Sistem suspensi dipasang diantara rangka kendaraan dengan poros roda, supaya getaran atau goncangan yang terjadi tidak di teruskan ke body. SPRUNG WEIGHT DAN UNSPRUNG WEIGHT Pada umumnya
SISTEM SUSPENSI Sistem suspensi dipasang diantara rangka kendaraan dengan poros roda, supaya getaran atau goncangan yang terjadi tidak di teruskan ke body. SPRUNG WEIGHT DAN UNSPRUNG WEIGHT Pada umumnya
RANCANG BANGUN STRUKTUR RANGKA KENDARAAN HYBRID RODA TIGA
 1 RANCANG BANGUN STRUKTUR RANGKA KENDARAAN HYBRID RODA TIGA Agil Erbiansyah dan Prof. Ir. I Nyoman Sutantra M.Sc.,Ph.D. Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
1 RANCANG BANGUN STRUKTUR RANGKA KENDARAAN HYBRID RODA TIGA Agil Erbiansyah dan Prof. Ir. I Nyoman Sutantra M.Sc.,Ph.D. Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
BAB 1 PENDAHULUAN. akan berbelok, maka ada dua skenario atau kejadian yang dikenal sebagai understeer
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Masalah Dalam berkendara, ketika kendaraan telah mencapai sebuah tikungan dan akan berbelok, maka ada dua skenario atau kejadian yang dikenal sebagai understeer dan
BAB 1 PENDAHULUAN 1.1 Latar Belakang Masalah Dalam berkendara, ketika kendaraan telah mencapai sebuah tikungan dan akan berbelok, maka ada dua skenario atau kejadian yang dikenal sebagai understeer dan
SISTEM KEMUDI & WHEEL ALIGNMENT
 SISTEM KEMUDI & WHEEL ALIGNMENT SISTEM KEMUDI I. URAIAN Fungsi sistem kemudi adalah untuk mengatur arah kendaraan dengan cara membelokkan roda depan. Bila steering wheel diputar, steering column akan meneruskan
SISTEM KEMUDI & WHEEL ALIGNMENT SISTEM KEMUDI I. URAIAN Fungsi sistem kemudi adalah untuk mengatur arah kendaraan dengan cara membelokkan roda depan. Bila steering wheel diputar, steering column akan meneruskan
Analisa Kinematik Secara Spatial Untuk Rack and Pinion pada Kendaraan Hybrid Roda Tiga Sapujagad 2
 JURNAL TEKNIK POMITS Vol. 1, No. 2, (214) ISSN: 231-9271 1 Analisa Kinematik Secara Spatial Untuk Rack and Pinion pada Kendaraan Hybrid Roda Tiga Sapujagad 2 Fachri Nugrahasyah Putra dan Unggul Wasiwitono
JURNAL TEKNIK POMITS Vol. 1, No. 2, (214) ISSN: 231-9271 1 Analisa Kinematik Secara Spatial Untuk Rack and Pinion pada Kendaraan Hybrid Roda Tiga Sapujagad 2 Fachri Nugrahasyah Putra dan Unggul Wasiwitono
Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda
 E97 Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda Yansen Prayitno dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
E97 Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda Yansen Prayitno dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
JURNAL TEKNIK ITS Vol. 5, No.21, (2016) ISSN: E103
 ISSN: E103") JURNA TEKNIK ITS Vol. 5, No.1, (016) ISSN: 301-971 E103 Analisis Pengaruh Parameter Operasional dan Penggunaan Stabilizer terhadap Perilaku Arah Belok Mobil Toyota Fortuner 4.0 V6 SR (AT 4X4) Deva Andriansyah
JURNA TEKNIK ITS Vol. 5, No.1, (016) ISSN: 301-971 E103 Analisis Pengaruh Parameter Operasional dan Penggunaan Stabilizer terhadap Perilaku Arah Belok Mobil Toyota Fortuner 4.0 V6 SR (AT 4X4) Deva Andriansyah
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Sistem Kemudi Di dalam sebuah sistem kemudi ada dua faktor yang menjadi tujuan dari setiap pengembangan teknologi otomotif yaitu mempermudah pengendalian kendaraan dan meningkatkan
BAB II LANDASAN TEORI 2.1 Sistem Kemudi Di dalam sebuah sistem kemudi ada dua faktor yang menjadi tujuan dari setiap pengembangan teknologi otomotif yaitu mempermudah pengendalian kendaraan dan meningkatkan
Analisa dynamics of handling kendaraan reverse trike ditinjau dari pergeseran centre of gravity (cg)
") Analisa dynamics of handling kendaraan reverse trike ditinjau dari pergeseran centre of gravity (cg) Bhanu Putra Bumi 1, Wibowo 2, R. Lulus Lambang G Hidayat 2 1 Program Sarjana Teknik Mesin, FakultasTeknik,
Analisa dynamics of handling kendaraan reverse trike ditinjau dari pergeseran centre of gravity (cg) Bhanu Putra Bumi 1, Wibowo 2, R. Lulus Lambang G Hidayat 2 1 Program Sarjana Teknik Mesin, FakultasTeknik,
Perancangan dan Analisa Sistem Kemudi Narrow Tilting Vehicle dengan Variasi Trackwidth dan Panjang Suspensi Arm
 E126 Perancangan dan Analisa Sistem Kemudi Narrow Tilting Vehicle dengan Variasi Trackwidth dan Panjang Suspensi Arm Idestrian Adzanta dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri,
E126 Perancangan dan Analisa Sistem Kemudi Narrow Tilting Vehicle dengan Variasi Trackwidth dan Panjang Suspensi Arm Idestrian Adzanta dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri,
BAB III DATA KENDARAAN UNTUK SIMULASI
 BAB III DATA KENDARAAN UNTUK SIMULASI 3.1. Tinjauan Pemodelan truk secara lengkap dikembangkan dan bertujuan untuk mempelajari efektivitas dari sistem Antilock Braking System termasuk pemodelan dinamika
BAB III DATA KENDARAAN UNTUK SIMULASI 3.1. Tinjauan Pemodelan truk secara lengkap dikembangkan dan bertujuan untuk mempelajari efektivitas dari sistem Antilock Braking System termasuk pemodelan dinamika
BAB IV HASIL DAN PEMBAHASAN. II untuk sumbu x. Perasamaannya dapat dilihat di bawah ini :
 BAB IV HASIL DAN PEMBAHASAN 4.1 Analisa Perancangan Rem Persamaan umum untuk sistem pengereman menurut Hukum Newton II untuk sumbu x. Perasamaannya dapat dilihat di bawah ini : F = m. a Frem- F x = m.
BAB IV HASIL DAN PEMBAHASAN 4.1 Analisa Perancangan Rem Persamaan umum untuk sistem pengereman menurut Hukum Newton II untuk sumbu x. Perasamaannya dapat dilihat di bawah ini : F = m. a Frem- F x = m.
Karakteristik Prilaku Arah Belok Kendaraan Tossa Hercules Ditinjau Dari Sudut Kemiringan Jalan
 Jurnal Rekayasa Mesin Vol.4, No.2 Tahun 213: 125-132 ISSN 216-468X Karakteristik Prilaku Arah Belok Kendaraan Tossa Hercules Ditinjau Dari Sudut Kemiringan Jalan Kadek Rihendra Dantes Jurusan Pendidikan
Jurnal Rekayasa Mesin Vol.4, No.2 Tahun 213: 125-132 ISSN 216-468X Karakteristik Prilaku Arah Belok Kendaraan Tossa Hercules Ditinjau Dari Sudut Kemiringan Jalan Kadek Rihendra Dantes Jurusan Pendidikan
Analisa Kinematik secara spatial untuk Rack and pinion pada Kendaraan hybrid roda 3 Sapujagad 2
 Analisa Kinematik secara spatial untuk Rack and pinion pada Kendaraan hybrid roda 3 Sapujagad 2 Oleh : Fachri Nugrahasyah Putra Nrp : 2108100107 Dosen Pembimbing : Dr. Unggul Wasiwitono, ST, M.Eng Keamanan
Analisa Kinematik secara spatial untuk Rack and pinion pada Kendaraan hybrid roda 3 Sapujagad 2 Oleh : Fachri Nugrahasyah Putra Nrp : 2108100107 Dosen Pembimbing : Dr. Unggul Wasiwitono, ST, M.Eng Keamanan
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Pengertian Suspensi Suspensi adalah kumpulan komponen tertentu yang dirancang untuk menyerap kejutan dari permukaan jalan yang bergelombang sehingga menambah kenyamanan berkendara
BAB II LANDASAN TEORI 2.1 Pengertian Suspensi Suspensi adalah kumpulan komponen tertentu yang dirancang untuk menyerap kejutan dari permukaan jalan yang bergelombang sehingga menambah kenyamanan berkendara
Analisa Kekuatan Material Velg Sepeda Motor Jenis Casting Wheel Terhadap Tumbukan dengan Variasi Kecepatan
 Tugas Akhir Analisa Kekuatan Material Velg Sepeda Motor Jenis Casting Wheel Terhadap Tumbukan dengan Variasi Kecepatan Oleh : Aldila Ningtyas 2108 100 003 Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik
Tugas Akhir Analisa Kekuatan Material Velg Sepeda Motor Jenis Casting Wheel Terhadap Tumbukan dengan Variasi Kecepatan Oleh : Aldila Ningtyas 2108 100 003 Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik
RANCANG BANGUN KURSI RODA YANG BISA NAIK TANGGA
 RANCANG BANGUN KURSI RODA YANG BISA NAIK TANGGA Alfian Hudan Nuzula 2105.100.034 Pembimbing: Prof. Dr. Ing. Ir. I Made Londen Batan, M.Eng Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi
RANCANG BANGUN KURSI RODA YANG BISA NAIK TANGGA Alfian Hudan Nuzula 2105.100.034 Pembimbing: Prof. Dr. Ing. Ir. I Made Londen Batan, M.Eng Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi
BAB III BALANS RODA/BAN
 BAB III BALANS RODA/BAN 3.1 TUJUAN Peserta didik dapat : 1. Dapat mengidentifikasi gangguan pada roda / ban 2. Dapat memahami dan menjelaskan balans static dan balans dinamik 3. Dapat membalans roda pada
BAB III BALANS RODA/BAN 3.1 TUJUAN Peserta didik dapat : 1. Dapat mengidentifikasi gangguan pada roda / ban 2. Dapat memahami dan menjelaskan balans static dan balans dinamik 3. Dapat membalans roda pada
Seminar Nasional Mesin dan Industri (SNMI4) 2008
 2008") Seminar Nasional Mesin dan Industri (SNMI) ANALISA KINEMATIKA GERAKAN BELOK AKIBAT PENGARUH DYNAMIC CENTRE OF GRAVITY (COG) DAN PANJANG WHEELBASE (L) MENENTUKAN SUDUT SIDE SLIP (Β) DAN HUBUNGANNYA TERHADAP
Seminar Nasional Mesin dan Industri (SNMI) ANALISA KINEMATIKA GERAKAN BELOK AKIBAT PENGARUH DYNAMIC CENTRE OF GRAVITY (COG) DAN PANJANG WHEELBASE (L) MENENTUKAN SUDUT SIDE SLIP (Β) DAN HUBUNGANNYA TERHADAP
Seminar Nasional Mesin dan Industri (SNMI4) 2008 PENENTUAN REGION SKID-NON SKID (2WS) TYPE MODEL KENDARAAN REAR WHEEL DRIVE (RWD)
 2008 PENENTUAN REGION SKID-NON SKID (2WS) TYPE MODEL KENDARAAN REAR WHEEL DRIVE (RWD)") PENENTUAN REGION SKID-NON SKID (2WS) TYPE MODEL KENDARAAN REAR WHEEL DRIVE (RWD) Ian Hardianto Siahaan dan Willyanto Anggono Jurusan Teknik Mesin Fakultas Teknologi Industri Universitas Kristen Petra Laboratorium
PENENTUAN REGION SKID-NON SKID (2WS) TYPE MODEL KENDARAAN REAR WHEEL DRIVE (RWD) Ian Hardianto Siahaan dan Willyanto Anggono Jurusan Teknik Mesin Fakultas Teknologi Industri Universitas Kristen Petra Laboratorium
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN 3.1 Diagram Alur Penelitian Dalam bab ini menguraikan tentang alur jalannya penelitian analisa power loss pada engine bus Hino R260 yang diakibatkan kesalahan pemindahan gigi
BAB III METODE PENELITIAN 3.1 Diagram Alur Penelitian Dalam bab ini menguraikan tentang alur jalannya penelitian analisa power loss pada engine bus Hino R260 yang diakibatkan kesalahan pemindahan gigi
ANALISIS STABILITAS RANCANGAN GANESHA ELECTRIC VEHICLES
 ANALISIS STABILITAS RANCANGAN GANESHA ELECTRIC VEHICLES 1.0 GENERASI 1 BERTRANSMISI CONTINOUS VARIABLE TRANSMISION (CVT) MENGGUNAKAN METODE QUASI STATIS Oleh : I Wayan Adi Sumertama 1, K.Rihendra Dantes.
ANALISIS STABILITAS RANCANGAN GANESHA ELECTRIC VEHICLES 1.0 GENERASI 1 BERTRANSMISI CONTINOUS VARIABLE TRANSMISION (CVT) MENGGUNAKAN METODE QUASI STATIS Oleh : I Wayan Adi Sumertama 1, K.Rihendra Dantes.
ANALISA GAYA PADA SISTEM KEMUDI TYPE RECIRCULATING BALL
 ANALISA GAYA PADA SISTEM KEMUDI TYPE RECIRCULATING BALL PUBLIKASI ILMIAH Disusun sebagai salah satu syarat menyelesaikan program studi Strata 1 pada Jurusan Teknik Mesin Fakultas Teknik Universitas Muhammadiyah
ANALISA GAYA PADA SISTEM KEMUDI TYPE RECIRCULATING BALL PUBLIKASI ILMIAH Disusun sebagai salah satu syarat menyelesaikan program studi Strata 1 pada Jurusan Teknik Mesin Fakultas Teknik Universitas Muhammadiyah
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Power Loss Power loss adalah hilangnya daya yang diakibatkan kesalahan pengemudi dalam melakukan pemindahan gigi transmisi yang tidak sesuai dengan putaran mesin seharusnya, sehingga
BAB II LANDASAN TEORI 2.1 Power Loss Power loss adalah hilangnya daya yang diakibatkan kesalahan pengemudi dalam melakukan pemindahan gigi transmisi yang tidak sesuai dengan putaran mesin seharusnya, sehingga
Pengaruh Variasi Konstanta Pegas dan Massa Roller CVT Terhadap Performa Honda Vario 150 cc
 E1 Pengaruh Variasi Konstanta Pegas dan Massa Roller CVT Terhadap Performa Honda Vario 150 cc Irvan Ilmy dan I Nyoman Sutantra Departemen Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
E1 Pengaruh Variasi Konstanta Pegas dan Massa Roller CVT Terhadap Performa Honda Vario 150 cc Irvan Ilmy dan I Nyoman Sutantra Departemen Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
PT Mercedes-Benz Distribution Indonesia
 BAB III PENGENALAN SUSPENSI PADA KENDARAAN MERCEDES-BENZ B- Class (W 245) 1.1 DASAR TEORI Komponen utama dari suspensi yang di gunakan pada kendaraan Mercedes-Benz B-class (w 245) terdiri dari beberapa
BAB III PENGENALAN SUSPENSI PADA KENDARAAN MERCEDES-BENZ B- Class (W 245) 1.1 DASAR TEORI Komponen utama dari suspensi yang di gunakan pada kendaraan Mercedes-Benz B-class (w 245) terdiri dari beberapa
BAB II DASAR TEORI. yang menggerakan roda telah dibebaskan oleh kopling. Agar kendaraan bias. dan dengan jarak yang seminim mungkin.
 BAB II DASAR TEORI 2.1 REM 2.1.1 Fungsi Rem Pada saat kendaraan mulai meluncur di jalanan, maka kelajuan akan tetap ada pada kendaraan itu walaupun mesin sudah dimatikan atau permindahan tenaga yang menggerakan
BAB II DASAR TEORI 2.1 REM 2.1.1 Fungsi Rem Pada saat kendaraan mulai meluncur di jalanan, maka kelajuan akan tetap ada pada kendaraan itu walaupun mesin sudah dimatikan atau permindahan tenaga yang menggerakan
NAMA : Rodika NRP : DOSEN PEMBIMBING Prof. Dr. Ing. Ir. I Made Londen Batan, M. Eng TESIS (TM ) RANCANG BANGUN SEPEDA PASCA STROKE
 RANCANG BANGUN SEPEDA PASCA STROKE") TESIS (TM 092501) RANCANG BANGUN SEPEDA PASCA STROKE NAMA : Rodika NRP : 2111201015 DOSEN PEMBIMBING Prof. Dr. Ing. Ir. I Made Londen Batan, M. Eng PROGRAM MAGISTER BIDANG KEAHLIAN SISTEM MANUFAKTUR JURUSAN
TESIS (TM 092501) RANCANG BANGUN SEPEDA PASCA STROKE NAMA : Rodika NRP : 2111201015 DOSEN PEMBIMBING Prof. Dr. Ing. Ir. I Made Londen Batan, M. Eng PROGRAM MAGISTER BIDANG KEAHLIAN SISTEM MANUFAKTUR JURUSAN
BAB II LANDASAN TEORI. seperti mesin, suspensi transmisi serta digunakan untuk menjaga mobil agar
 7 BAB II LANDASAN TEORI 2.1 Definisi Chassis Chassis merupakan komponen utama pada kendaraan yang terbuat dari material kuat seperti besi dan baja, yang di buat dengan struktur dan perhitungan yang presisi
7 BAB II LANDASAN TEORI 2.1 Definisi Chassis Chassis merupakan komponen utama pada kendaraan yang terbuat dari material kuat seperti besi dan baja, yang di buat dengan struktur dan perhitungan yang presisi
BAB III ANALISIS KASUS
 A. Analisis BAB III ANALISIS KASUS Penulis mengumpulkan data-data teknis pada mobil Daihatsu Gran Max Pick Up 3SZ-VE dalam menganalisis sistem suspensi belakang untuk kerja pegas daun (leaf spring), dimana
A. Analisis BAB III ANALISIS KASUS Penulis mengumpulkan data-data teknis pada mobil Daihatsu Gran Max Pick Up 3SZ-VE dalam menganalisis sistem suspensi belakang untuk kerja pegas daun (leaf spring), dimana
ANALISIS STABILITAS ARAH MOBIL TOYOTA AGYA G DENGAN VARIASI JUMLAH PENUMPANG, KECEPATAN BELOK, SUDUT BELOK DAN KEMIRINGAN MELINTANG JALAN
 TUGAS AKHIR TM 141585 ANALISIS STABILITAS ARAH MOBIL TOYOTA AGYA G DENGAN VARIASI JUMLAH PENUMPANG, KECEPATAN BELOK, SUDUT BELOK DAN KEMIRINGAN MELINTANG JALAN Faisal Rahman 2111 100 113 Dosen Pembimbing
TUGAS AKHIR TM 141585 ANALISIS STABILITAS ARAH MOBIL TOYOTA AGYA G DENGAN VARIASI JUMLAH PENUMPANG, KECEPATAN BELOK, SUDUT BELOK DAN KEMIRINGAN MELINTANG JALAN Faisal Rahman 2111 100 113 Dosen Pembimbing
BAB 2 LANDASAN TEORI. Metode ini digunakan untuk menyelesaikan permasalahan yang terjadi pada
 BAB 2 LANDASAN TEORI 2.1 Metode Kendali Umpan Maju Metode ini digunakan untuk menyelesaikan permasalahan yang terjadi pada fenomena berkendara ketika berbelok, dimana dilakukan pemodelan matematika yang
BAB 2 LANDASAN TEORI 2.1 Metode Kendali Umpan Maju Metode ini digunakan untuk menyelesaikan permasalahan yang terjadi pada fenomena berkendara ketika berbelok, dimana dilakukan pemodelan matematika yang
SIMULASI PENGENDALIAN SUDUT KEMIRINGAN BELOK SEPEDA MOTOR MELALUI PENAMBAHAN KOMPONEN GYROSCOPIC
 SIMULASI PENGENDALIAN SUDUT KEMIRINGAN BELOK SEPEDA MOTOR MELALUI PENAMBAHAN KOMPONEN GYROSCOPIC I Ketut Adi Atmika, I DG Ary Subagia Jurusan Teknik Mesin, Fakultas Teknik, Universitas Udayana E-mail :
SIMULASI PENGENDALIAN SUDUT KEMIRINGAN BELOK SEPEDA MOTOR MELALUI PENAMBAHAN KOMPONEN GYROSCOPIC I Ketut Adi Atmika, I DG Ary Subagia Jurusan Teknik Mesin, Fakultas Teknik, Universitas Udayana E-mail :
Smart Chassis System Berbasis Proporsi Kontrol Traksi dan Pengereman I Ketut Adi Atmika
 Smart Chassis System Berbasis Proporsi Kontrol Traksi dan Pengereman I Ketut Adi Atmika Jurusan Teknik Mesin Fakultas Teknik Universitas Udayana Kampus Bukit Jimbaran, Bali, Indonesia Email: tutadi2001@yahoo.com
Smart Chassis System Berbasis Proporsi Kontrol Traksi dan Pengereman I Ketut Adi Atmika Jurusan Teknik Mesin Fakultas Teknik Universitas Udayana Kampus Bukit Jimbaran, Bali, Indonesia Email: tutadi2001@yahoo.com
Rancang Bangun Sistem Chassis Kendaraan Pengais Garam
 SIDANG TUGAS AKHIR TM091476 Rancang Bangun Sistem Chassis Kendaraan Pengais Garam Oleh: AGENG PREMANA 2108 100 603 JURUSAN TEKNIK MESIN FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
SIDANG TUGAS AKHIR TM091476 Rancang Bangun Sistem Chassis Kendaraan Pengais Garam Oleh: AGENG PREMANA 2108 100 603 JURUSAN TEKNIK MESIN FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
BAB I PENDAHULUAN. seiring dengan perkembangan serta kemajuan di bidang industri terutama dalam
 BAB I PENDAHULUAN 1.1 Latar Belakang Gokart saat ini sangat berkembang dalam ilmu pengetahuan dan teknologi, seiring dengan perkembangan serta kemajuan di bidang industri terutama dalam bidang otomotif.
BAB I PENDAHULUAN 1.1 Latar Belakang Gokart saat ini sangat berkembang dalam ilmu pengetahuan dan teknologi, seiring dengan perkembangan serta kemajuan di bidang industri terutama dalam bidang otomotif.
BAB III ANALISIS SISTEM SUSPENSI DEPAN
 35 BAB III ANALISIS SISTEM SUSPENSI DEPAN 3.1. Daftar Spesifikasi Kendaraan 1) Spesifikasi Kendaraan Toyota Kijang Innova 2.0 V M/T Tahun 2004 Tabel 3.1. Spesifikasi Kendaraan Toyota Kijang Innova 2.0
35 BAB III ANALISIS SISTEM SUSPENSI DEPAN 3.1. Daftar Spesifikasi Kendaraan 1) Spesifikasi Kendaraan Toyota Kijang Innova 2.0 V M/T Tahun 2004 Tabel 3.1. Spesifikasi Kendaraan Toyota Kijang Innova 2.0
SISTEM SUSPENSI & BAN
 SISTEM SUSPENSI & BAN SISTEM SUSPENSI URAIAN Sistem suspensi terletak diantara bodi kendaraan dan roda-roda, dan dirancang untuk menyerap kejutan dari permukaan jalan sehingga menambah kenyamanan. Komponen
SISTEM SUSPENSI & BAN SISTEM SUSPENSI URAIAN Sistem suspensi terletak diantara bodi kendaraan dan roda-roda, dan dirancang untuk menyerap kejutan dari permukaan jalan sehingga menambah kenyamanan. Komponen
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN 3.1 Diagram Alur Penelitian Dalam bab ini menguraikan tentang alur jalannya penelitian analisa Ketepatan Tekanan Tutup Radiator pada Bus Hino R260. Diagram alur penelitian ini
BAB III METODE PENELITIAN 3.1 Diagram Alur Penelitian Dalam bab ini menguraikan tentang alur jalannya penelitian analisa Ketepatan Tekanan Tutup Radiator pada Bus Hino R260. Diagram alur penelitian ini
Pemodelan dan Analisa Antilock Braking System (ABS) Pada Military Vehicle Studi Kasus Panser Anoa APC 6X6
 Pada Military Vehicle Studi Kasus Panser Anoa APC 6X6") JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: 2301-9271 A-801 Pemodelan dan Analisa Antilock Braking System (ABS) Pada Military Vehicle Studi Kasus Panser Anoa APC 6X6 Muhammad Jundulloh dan I Nyoman Sutantra
JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: 2301-9271 A-801 Pemodelan dan Analisa Antilock Braking System (ABS) Pada Military Vehicle Studi Kasus Panser Anoa APC 6X6 Muhammad Jundulloh dan I Nyoman Sutantra
BAB IV PROSES PERANCANGAN
 BAB IV PROSES PERANCANGAN 4.1 Rancangan Teoritis Rancangan teoritis yang ideal perlu ditetapkan sebagai acuan perancangan dan pemilihan bahan. Dengan mempertimbangkan kondisi pembebanan dan spesifikasi
BAB IV PROSES PERANCANGAN 4.1 Rancangan Teoritis Rancangan teoritis yang ideal perlu ditetapkan sebagai acuan perancangan dan pemilihan bahan. Dengan mempertimbangkan kondisi pembebanan dan spesifikasi
BAB II LANDASAN TEORI
 II-1 BAB II LANDASAN TEORI Suatu sistem penggerak yang terdapat dalam sebuah mobil tidak lepas dari peranan motor penggerak dan transmisi sebagai penghantar putaran dari motor penggerak sehingga mobil
II-1 BAB II LANDASAN TEORI Suatu sistem penggerak yang terdapat dalam sebuah mobil tidak lepas dari peranan motor penggerak dan transmisi sebagai penghantar putaran dari motor penggerak sehingga mobil
BAB I PENDAHULUAN A. Latar Belakang Tio Agustian, 2014 Analisis front wheel alignment (fwa) pada kendaraan Daihatsu Gran Max Pick Up
 pada kendaraan Daihatsu Gran Max Pick Up") BAB I PENDAHULUAN A. Latar Belakang Perkembangan Industri mobil di Indonesia ini sangatlah maju, dalam penggunaannya mobil digunakan sebagai sarana yang dapat membantu kebanyakan orang untuk memindahkan
BAB I PENDAHULUAN A. Latar Belakang Perkembangan Industri mobil di Indonesia ini sangatlah maju, dalam penggunaannya mobil digunakan sebagai sarana yang dapat membantu kebanyakan orang untuk memindahkan
INFOMATEK Volume 6 Nomor 1 Maret 2004 DESAIN & PEMBUATAN PROTOTIPE LIGHT BUGGY
 Desain & Pembuatan Prototipe Light Buggy INFOMATEK Volume 6 Nomor 1 Maret 2004 DESAIN & PEMBUATAN PROTOTIPE LIGHT BUGGY Farid Rizayana Design Center Jurusan Teknik Mesin Fakultas Teknik Universitas Pasundan
Desain & Pembuatan Prototipe Light Buggy INFOMATEK Volume 6 Nomor 1 Maret 2004 DESAIN & PEMBUATAN PROTOTIPE LIGHT BUGGY Farid Rizayana Design Center Jurusan Teknik Mesin Fakultas Teknik Universitas Pasundan
BAB III ANALISIS FRONT WHEEL ALIGNMENT PADA DAIHATSU GRAN MAX PICK UP
 BAB III ANALISIS FRONT WHEEL ALIGNMENT PADA DAIHATSU GRAN MAX PICK UP A. Spesifikasi Kendaraan Daihatsu Gran Max SPESIFIKASI PICK UP 1.3 1.5 STD 3W STD 3W BOX 1.3 1.5 DIMENSI Panjang keseluruhan Lebar
BAB III ANALISIS FRONT WHEEL ALIGNMENT PADA DAIHATSU GRAN MAX PICK UP A. Spesifikasi Kendaraan Daihatsu Gran Max SPESIFIKASI PICK UP 1.3 1.5 STD 3W STD 3W BOX 1.3 1.5 DIMENSI Panjang keseluruhan Lebar
KARAKTERISTIK TRAKSI DAN KINERJA TRANSMISI PADA SISTEM GEAR TRANSMISSION DAN GEARLESS TRANSMISSION
 KARAKTERISTIK TRAKSI DAN KINERJA TRANSMISI PADA SISTEM GEAR TRANSMISSION DAN GEARLESS TRANSMISSION I G N P Tenaya dan I Ketut Adi Atmika Staf pengajar PST. Mesin Fakultas Teknik Universitas Udayana ABSTRAK
KARAKTERISTIK TRAKSI DAN KINERJA TRANSMISI PADA SISTEM GEAR TRANSMISSION DAN GEARLESS TRANSMISSION I G N P Tenaya dan I Ketut Adi Atmika Staf pengajar PST. Mesin Fakultas Teknik Universitas Udayana ABSTRAK
Redesign Sistem Peredam Sekunder dan Analisis Pengaruh Variasi Nilai Koefisien Redam Terhadap Respon Dinamis Kereta Api Penumpang Ekonomi (K3)
") E33 Redesign Sistem Peredam Sekunder dan Analisis Pengaruh Variasi Nilai Koefisien Redam Terhadap Respon Dinamis Kereta Api Penumpang Ekonomi (K3) Dewani Intan Asmarani Permana dan Harus Laksana Guntur
E33 Redesign Sistem Peredam Sekunder dan Analisis Pengaruh Variasi Nilai Koefisien Redam Terhadap Respon Dinamis Kereta Api Penumpang Ekonomi (K3) Dewani Intan Asmarani Permana dan Harus Laksana Guntur
Analisis Kinerja Traksi Dan Redesign Transmisi Armored Personnel Carrier Komodo 4x4
 E7 Analisis Kinerja Traksi Dan Redesign Transmisi Armored Personnel Carrier Komodo 4x4 M. Anggi Siregar dan I Nyoman Sutantra Departemen Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
E7 Analisis Kinerja Traksi Dan Redesign Transmisi Armored Personnel Carrier Komodo 4x4 M. Anggi Siregar dan I Nyoman Sutantra Departemen Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
PR I PERGERAKAN RODA KENDARAAN BERMOTOR AKIBAT GESEKAN
 Nama : Fatimah NIM : 20214039 Mata Kuliah :Metodelogi Penelitian PR I PERGERAKAN RODA KENDARAAN BERMOTOR AKIBAT GESEKAN Secara prinsip mobil terdiri dari tiga bagian utama. Yang pertama adalah mesin sebagai
Nama : Fatimah NIM : 20214039 Mata Kuliah :Metodelogi Penelitian PR I PERGERAKAN RODA KENDARAAN BERMOTOR AKIBAT GESEKAN Secara prinsip mobil terdiri dari tiga bagian utama. Yang pertama adalah mesin sebagai
BAB III KONSTRUKSI DOUBLE WISHBONE
 BAB III KONSTRUKSI DOUBLE WISHBONE Suspensi double wishbone merupakan sebuah mekanisme suspensi bebas yang terdiri dari lengan-lengan (dapat berbentuk silinder berlubang, pipa, maupun batang) yang memiliki
BAB III KONSTRUKSI DOUBLE WISHBONE Suspensi double wishbone merupakan sebuah mekanisme suspensi bebas yang terdiri dari lengan-lengan (dapat berbentuk silinder berlubang, pipa, maupun batang) yang memiliki
PARAMETER SUDUT BELOK RODA PADA KENDARAAN DENGAN SISTEM KEMUDI EMPAT RODA
 209 PARAMETER SUDUT BELOK RODA PADA KENDARAAN DENGAN SISTEM KEMUDI EMPAT RODA Wibowo 1 1 Staf Pengajar Jurusan Teknik Mesin Universitas Sebelas Maret Keywords : Two wheel steering Four wheel steering Steer
209 PARAMETER SUDUT BELOK RODA PADA KENDARAAN DENGAN SISTEM KEMUDI EMPAT RODA Wibowo 1 1 Staf Pengajar Jurusan Teknik Mesin Universitas Sebelas Maret Keywords : Two wheel steering Four wheel steering Steer
Rancang Bangun Kendaraan Roda Empat Bermotor Bagi Penyandang Cacat Kaki Dengan Penggerak Motor Stasioner
 Presentasi Tugas Akhir Rancang Bangun Kendaraan Roda Empat Bermotor Bagi Penyandang Cacat Kaki Dengan Penggerak Motor Stasioner Oleh: Cahyan Nahar MZ 2106 030 075 Pembimbing: Ir. Budi Luwar S,MT Program
Presentasi Tugas Akhir Rancang Bangun Kendaraan Roda Empat Bermotor Bagi Penyandang Cacat Kaki Dengan Penggerak Motor Stasioner Oleh: Cahyan Nahar MZ 2106 030 075 Pembimbing: Ir. Budi Luwar S,MT Program
BAB IV PERHITUNGAN HIDRAULIK
 BAB IV PERHITUNGAN HIDRAULIK.1. Perhitungan Silinder-silinder Hidraulik.1.1. Kecepatan Rata-rata Menurut Audel Pumps dan Compressor Hand Book by Frank D. Graha dan Tara Poreula, kecepatan piston dipilih
BAB IV PERHITUNGAN HIDRAULIK.1. Perhitungan Silinder-silinder Hidraulik.1.1. Kecepatan Rata-rata Menurut Audel Pumps dan Compressor Hand Book by Frank D. Graha dan Tara Poreula, kecepatan piston dipilih
Tugas Akhir ANALISA PENGARUH TEBAL DAN GEOMETRI SPOKE BERBENTUK SQUARE BAN TANPA ANGIN TERHADAP KEKAKUAN RADIAL DAN LATERAL
 Tugas Akhir ANALISA PENGARUH TEBAL DAN GEOMETRI SPOKE BERBENTUK SQUARE BAN TANPA ANGIN TERHADAP KEKAKUAN RADIAL DAN LATERAL» Oleh : Rahmad Hidayat 2107100136» Dosen Pembimbing : Dr.Ir.Agus Sigit Pramono,DEA
Tugas Akhir ANALISA PENGARUH TEBAL DAN GEOMETRI SPOKE BERBENTUK SQUARE BAN TANPA ANGIN TERHADAP KEKAKUAN RADIAL DAN LATERAL» Oleh : Rahmad Hidayat 2107100136» Dosen Pembimbing : Dr.Ir.Agus Sigit Pramono,DEA
Surya Hadi Putranto
 TUGAS AKHIR Rancang Bangun Speed Bump dan Analisa Respon Speed Bump Terhadap Kecepatan Kendaraan Dosen Pembimbing : Ir. Abdul Aziz Achmad Surya Hadi Putranto 2105100163 Latar Belakang Dalam kehidupan sehari-hari,
TUGAS AKHIR Rancang Bangun Speed Bump dan Analisa Respon Speed Bump Terhadap Kecepatan Kendaraan Dosen Pembimbing : Ir. Abdul Aziz Achmad Surya Hadi Putranto 2105100163 Latar Belakang Dalam kehidupan sehari-hari,
Apabila berat roda didistribusikan merata pada poros roda, titik tertentu dari roda akan dapat berhenti pada segala posisi. Dalam kondisi semacam ini
 Meningkatkan kemampuan mesin, handling dan kemampuan pengereman, juga aerodinamik body. Memungkinkan kendaraan dapat berjalan dengan kecepatan yang semakin tinggi. Pada kecepatan tinggi. wheel assembly
Meningkatkan kemampuan mesin, handling dan kemampuan pengereman, juga aerodinamik body. Memungkinkan kendaraan dapat berjalan dengan kecepatan yang semakin tinggi. Pada kecepatan tinggi. wheel assembly
LAPORAN TUGAS AKHIR ANALISA PERILAKU ARAH SISTEM KEMUDI KENDARAAN GOKART DENGAN MESIN HONDA SUPRA X 110CC
 LAPORAN TUGAS AKHIR ANALISA PERILAKU ARAH SISTEM KEMUDI KENDARAAN GOKART DENGAN MESIN HONDA SUPRA X 110CC Diajukan Guna Memenuhi Syarat Kelulusan Mata Kuliah Tugas Akhir Pada Program Sarjana Strata Satu
LAPORAN TUGAS AKHIR ANALISA PERILAKU ARAH SISTEM KEMUDI KENDARAAN GOKART DENGAN MESIN HONDA SUPRA X 110CC Diajukan Guna Memenuhi Syarat Kelulusan Mata Kuliah Tugas Akhir Pada Program Sarjana Strata Satu
MEKANIKA UNIT. Pengukuran, Besaran & Vektor. Kumpulan Soal Latihan UN
 Kumpulan Soal Latihan UN UNIT MEKANIKA Pengukuran, Besaran & Vektor 1. Besaran yang dimensinya ML -1 T -2 adalah... A. Gaya B. Tekanan C. Energi D. Momentum E. Percepatan 2. Besar tetapan Planck adalah
Kumpulan Soal Latihan UN UNIT MEKANIKA Pengukuran, Besaran & Vektor 1. Besaran yang dimensinya ML -1 T -2 adalah... A. Gaya B. Tekanan C. Energi D. Momentum E. Percepatan 2. Besar tetapan Planck adalah
PERANCANGAN SISTEM KEMUDI MANUAL PADA MOBIL LISTRIK
 Jurnal Elemen Volume 4 Nomor 1, Juni 2017 ISSN : 2442-4471 PERANCANGAN SISTEM KEMUDI MANUAL PADA MOBIL LISTRIK Kurnia Dwi Artika 1, Rusuminto Syahyuniar 2, Nanda Priono 3 1),2) Staf Pengajar Jurusan Mesin
Jurnal Elemen Volume 4 Nomor 1, Juni 2017 ISSN : 2442-4471 PERANCANGAN SISTEM KEMUDI MANUAL PADA MOBIL LISTRIK Kurnia Dwi Artika 1, Rusuminto Syahyuniar 2, Nanda Priono 3 1),2) Staf Pengajar Jurusan Mesin
SIMULASI DAN ANALISA HANDLING PERFORMANCE PADA KENDARAAN SEDAN DENGAN MENGGUNAKAN SOFTWARE CARSIMED 4.51
 TUGAS SARJANA SIMULASI DAN ANALISA HANDLING PERFORMANCE PADA KENDARAAN SEDAN DENGAN MENGGUNAKAN SOFTWARE CARSIMED 4.51 Diajukan sebagai salah satu tugas dan syarat untuk memperoleh gelar Sarjana (S-1)
TUGAS SARJANA SIMULASI DAN ANALISA HANDLING PERFORMANCE PADA KENDARAAN SEDAN DENGAN MENGGUNAKAN SOFTWARE CARSIMED 4.51 Diajukan sebagai salah satu tugas dan syarat untuk memperoleh gelar Sarjana (S-1)
PERANCANGAN ELECTRIC ENERGY RECOVERY SYSTEM PADA SEPEDA LISTRIK
 PERANCANGAN ELECTRIC ENERGY RECOVERY SYSTEM PADA SEPEDA LISTRIK ANDHIKA IFFASALAM 2105.100.080 Jurusan Teknik Mesin Fakultas TeknologiIndustri Institut TeknologiSepuluhNopember Surabaya 2012 LATAR BELAKANG
PERANCANGAN ELECTRIC ENERGY RECOVERY SYSTEM PADA SEPEDA LISTRIK ANDHIKA IFFASALAM 2105.100.080 Jurusan Teknik Mesin Fakultas TeknologiIndustri Institut TeknologiSepuluhNopember Surabaya 2012 LATAR BELAKANG
PERANCANGAN ALAT UJI SISTEM REM DAN DETAIL DRAWING KOMPONEN REM MOBIL MULTIGUNA PEDESAAN
 PERANCANGAN ALAT UJI SISTEM REM DAN DETAIL DRAWING KOMPONEN REM MOBIL MULTIGUNA PEDESAAN Muhammad Habibi NRP 2110 106 022 Dosen Pembimbing Dr. Eng. Harus Laksana Guntur, ST. M.Eng. Jurusan Teknik Mesin
PERANCANGAN ALAT UJI SISTEM REM DAN DETAIL DRAWING KOMPONEN REM MOBIL MULTIGUNA PEDESAAN Muhammad Habibi NRP 2110 106 022 Dosen Pembimbing Dr. Eng. Harus Laksana Guntur, ST. M.Eng. Jurusan Teknik Mesin
BAB IV HASIL & PEMBAHASAN. 4.1 Hasil Perancangan Komponen Utama & Komponen Pendukung Pada
 BAB IV HASIL & PEMBAHASAN 4.1 Hasil Perancangan Komponen Utama & Komponen Pendukung Pada Rangka Gokart Kendaraan Gokart terdiri atas beberapa komponen pembentuk baik komponen utama maupun komponen tambahan.
BAB IV HASIL & PEMBAHASAN 4.1 Hasil Perancangan Komponen Utama & Komponen Pendukung Pada Rangka Gokart Kendaraan Gokart terdiri atas beberapa komponen pembentuk baik komponen utama maupun komponen tambahan.
Setelah mengikuti pelajaran ini peserta dapat mengetahui fungsi wheel alignment.
 CHASIS WHEEL ALIGNMENT Tujuan Instruksional Umum : Setelah mengikuti pelajaran ini peserta dapat mengetahui fungsi wheel alignment. Tujuan Instruksional Khusus : 1. Peserta dapat menyebutkan definisi,
CHASIS WHEEL ALIGNMENT Tujuan Instruksional Umum : Setelah mengikuti pelajaran ini peserta dapat mengetahui fungsi wheel alignment. Tujuan Instruksional Khusus : 1. Peserta dapat menyebutkan definisi,
MODIFIKASI DAN PEMBUATAN SERTA PENGUJIAN SISTEM HANDBRAKE SEMI OTOMATIS SEBAGAI PERANGKAT SAFETY PADA KENDARAAN
 MODIFIKASI DAN PEMBUATAN SERTA PENGUJIAN SISTEM HANDBRAKE SEMI OTOMATIS SEBAGAI PERANGKAT SAFETY PADA KENDARAAN Ian Hardianto Siahaan, A Ian Wiyono Prodi Teknik Mesin Universitas Kristen Petra Jalan. Siwalankerto
MODIFIKASI DAN PEMBUATAN SERTA PENGUJIAN SISTEM HANDBRAKE SEMI OTOMATIS SEBAGAI PERANGKAT SAFETY PADA KENDARAAN Ian Hardianto Siahaan, A Ian Wiyono Prodi Teknik Mesin Universitas Kristen Petra Jalan. Siwalankerto
PERANCANGAN MEKANISME UJI KARAKTERISTIK SISTEM KEMUDI
 PERANCANGAN MEKANISME UJI KARAKTERISTIK SISTEM KEMUDI Mochammad Reza Pahlevi, Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman
PERANCANGAN MEKANISME UJI KARAKTERISTIK SISTEM KEMUDI Mochammad Reza Pahlevi, Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman
Perancangan Sistem Kemudi, Sistem Rem, Dan Roda Urban City Car Untuk Kompetisi Urbanconcept Shell Eco-Marathon.
 Perancangan Sistem Kemudi, Sistem Rem, Dan Roda Urban City Car Untuk Kompetisi Urbanconcept Shell Eco-Marathon. Agustinus Herdianto Jurusan Teknik Mesin Program Otomotif Universitas Kristen Petra Jalan.
Perancangan Sistem Kemudi, Sistem Rem, Dan Roda Urban City Car Untuk Kompetisi Urbanconcept Shell Eco-Marathon. Agustinus Herdianto Jurusan Teknik Mesin Program Otomotif Universitas Kristen Petra Jalan.
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Dasar Power Steering Dalam mengemudikan kendaraan roda empat, terkadang kita menemukan kendaraan yang mudah untuk dikendarai dan ada juga yang sulit. Salah satu faktornya adalah
BAB II LANDASAN TEORI 2.1 Dasar Power Steering Dalam mengemudikan kendaraan roda empat, terkadang kita menemukan kendaraan yang mudah untuk dikendarai dan ada juga yang sulit. Salah satu faktornya adalah
Integrasi Parameter Traksi dalam Pengendalian Perilaku Yawing Multi Steering Sistim
 Integrasi Parameter Traksi dalam Pengendalian Perilaku Yawing Multi Steering Sistim I.D.G Ary Subagia Jurusan Teknik Mesin Fakultas Teknik Universitas Udayana Email: arsubmt@me.unud.ac.id ABSTRAK Sistem
Integrasi Parameter Traksi dalam Pengendalian Perilaku Yawing Multi Steering Sistim I.D.G Ary Subagia Jurusan Teknik Mesin Fakultas Teknik Universitas Udayana Email: arsubmt@me.unud.ac.id ABSTRAK Sistem
Analisis Kenyamanan serta Redesain Pegas Suspensi Mobil Toyota Fortuner 4.0 V6 SR (AT 4x4)
") Analisis Kenyamanan serta Redesain Pegas Suspensi Mobil Toyota Fortuner 4.0 V6 SR (AT 4x4) Puja Priyambada dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
Analisis Kenyamanan serta Redesain Pegas Suspensi Mobil Toyota Fortuner 4.0 V6 SR (AT 4x4) Puja Priyambada dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
BAB III ANALISIS PERBAIKAN SISTEM SUSUPENSI BELAKANG. menganalisa sistem suspensi belakang untuk kerja coil spring dimana data dan
 28 BAB III ANALISIS PERBAIKAN SISTEM SUSUPENSI BELAKANG A. Analisis Penulis mengumpulkan data-data teknis pada mobil Toyota Innova dalam menganalisa sistem suspensi belakang untuk kerja coil spring dimana
28 BAB III ANALISIS PERBAIKAN SISTEM SUSUPENSI BELAKANG A. Analisis Penulis mengumpulkan data-data teknis pada mobil Toyota Innova dalam menganalisa sistem suspensi belakang untuk kerja coil spring dimana
ANALISA DESAIN STRUKTUR DAN KESTABILAN SUSPENSI PASSIVE PADA SMART PERSONAL VEHICLE 2 RODA
 SIDANG TUGAS AKHIR ANALISA DESAIN STRUKTUR DAN KESTABILAN SUSPENSI PASSIVE PADA SMART PERSONAL VEHICLE 2 RODA Disusun oleh Yonathan A. Kapugu (2106100019) Dosen pembimbing Prof. Ir. IN Sutantra, M.Sc.,
SIDANG TUGAS AKHIR ANALISA DESAIN STRUKTUR DAN KESTABILAN SUSPENSI PASSIVE PADA SMART PERSONAL VEHICLE 2 RODA Disusun oleh Yonathan A. Kapugu (2106100019) Dosen pembimbing Prof. Ir. IN Sutantra, M.Sc.,
BAB II DASAR TEORI Suspensi
 digilib.uns.ac.id BAB II DASAR TEORI 2. 1. Suspensi Suspensi adalah suatu sistem yang berfungsi meredam kejutan, getaran yang terjadi pada kendaraan akibat permukaan jalan yang tidak rata. Suspensi dapat
digilib.uns.ac.id BAB II DASAR TEORI 2. 1. Suspensi Suspensi adalah suatu sistem yang berfungsi meredam kejutan, getaran yang terjadi pada kendaraan akibat permukaan jalan yang tidak rata. Suspensi dapat
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN 3.1 Diagram Penelitian Dalam bab ini menguraikan tentang alur jalannya penelitian analisa lokal overheating pada mesin bus 6 silinder. Diagram alur penelitian ini diperlukan untuk
BAB III METODE PENELITIAN 3.1 Diagram Penelitian Dalam bab ini menguraikan tentang alur jalannya penelitian analisa lokal overheating pada mesin bus 6 silinder. Diagram alur penelitian ini diperlukan untuk
MESIN PEMINDAH BAHAN
 TUGAS SARJANA MESIN PEMINDAH BAHAN PERENCANAAN LIFT UNTUK KEPERLUAN GEDUNG PERKANTORAN BERLANTAI SEPULUH Oleh : R O I M A N T A S. NIM : 030421007 PROGRAM PENDIDIKAN SARJANA EKSTENSI DEPARTEMEN TEKNIK
TUGAS SARJANA MESIN PEMINDAH BAHAN PERENCANAAN LIFT UNTUK KEPERLUAN GEDUNG PERKANTORAN BERLANTAI SEPULUH Oleh : R O I M A N T A S. NIM : 030421007 PROGRAM PENDIDIKAN SARJANA EKSTENSI DEPARTEMEN TEKNIK
STUDI PERFORMANSI KENDARAAN MULTIGUNA PEDESAAN
 0708: Yohanes & Agus S. Pramono TR-65 STUDI PERFORMANSI KENDARAAN MULTIGUNA PEDESAAN Yohanes dan Agus Sigit Pramono Laboratorium Otomotif Jurusan Teknik Mesin, Institut Teknologi Sepuluh Nopember Kampus
0708: Yohanes & Agus S. Pramono TR-65 STUDI PERFORMANSI KENDARAAN MULTIGUNA PEDESAAN Yohanes dan Agus Sigit Pramono Laboratorium Otomotif Jurusan Teknik Mesin, Institut Teknologi Sepuluh Nopember Kampus
ANALISIS STRUKTURAL PERFORMA CHASSIS SAPUANGIN SPEED Oleh : Muhammad Fadlil Adhim
 ANALISIS STRUKTURAL PERFORMA CHASSIS SAPUANGIN SPEED 2013 Oleh : Muhammad Fadlil Adhim 2110100703 Latar Belakang Partisipasi ITS Team Sapuangin di ajang Student Formula Japan 2013 BAGIAN YANG ENGINE MENENTUKAN
ANALISIS STRUKTURAL PERFORMA CHASSIS SAPUANGIN SPEED 2013 Oleh : Muhammad Fadlil Adhim 2110100703 Latar Belakang Partisipasi ITS Team Sapuangin di ajang Student Formula Japan 2013 BAGIAN YANG ENGINE MENENTUKAN