JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER
|
|
|
- Yenny Setiawan
- 6 tahun lalu
- Tontonan:
Transkripsi
1 Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER


2 Latar Belakang Kendali PID merupakan algoritma kendali yang banyak digunakan di industri proses karena bentuknya yang sederhana dan mudah diimplementasikan. Sistem pengendalian yang mengontrol proses harus Reliable, dan adaptif dalam mengikuti perubahan proses. Pada kondisi operasi tertentu (seperti misalnya sering terjadi gangguan pada proses yang berubah-ubah), parameter kontrol ini harus sering dituning ulang agar kinerjanya sesuai dengan performansi yang diharapkan. Ketertarikan untuk melakukan kajian mengenai kinerja kontrol ph berbasis Logika Fuzzy-PID secara Gain Scheduling.
3 Permasalahan Menerapkan logika fuzzy-pid pada sistem pengendalian ph yang bersifat nonlinier dari percampuran larutan CH 3 COOH dan NaOH secara real plant agar diperoleh performa yang baik. Pembobotan nilai input berdasar percobaan. Menyusun rule base dalam logika fuzzy untuk gain Kp, Ti dan Td.
4 Batasan Masalah Proses titrasi yang digunakan adalah reaksi antara asam lemah CH 3 COOH yang dititrasi oleh basa kuat NaOH. Pada proses pencampuran dilakukan dengan metode pencampuran, dimana asam atau basa ditambahkan ke dalam tangki untuk mencapai setpoint yang diinginkan. Anggota membership function adalah gain Kp, Ti dan Td Penggunaan fungsi keanggotaan fuzzy hanya dibatasi pada fungsi keanggotaan triangular fuzzifier.
5 Tujuan Merancang sistem pengendali logika fuzzy-pid sebagai sistem pengendalian ph (titrasi CH 3 COOH dan NaOH) secara real plant dengan cara Men-schedule gain proporsional (Kp), gain integral (Ti), dan gain derivativ (Td) dengan performansi terbaik.
6 Teori Penunjang Form time-domain dari PID controller Sistem Fuzzy ph Titrasi NaOH (ml) Titrasi Asam Lemah dan Basa Kuat Sumber : Jan Richardo P. Gultom Rancang Bangun Kontrol ph Berbasis Fuzzy Logic Control. ITS B Hamed, M Al-Mobaied Fuzzy-PID Controllers Using FPGA Technique for Real Time DC Motor Speed Control. Jurnal Intelligent Control and Automation, paper halaman
7 Metodologi Memperoleh data dengan melakukan studi literatur. Melakukan eksperimen. Merekam input-pembobotan-menetapkan rule base guna mendapat komposisi Kp, Ti, Td dengan performa terbaik.
8 Diagram Alir Penelitian

9 Miniplant sistem pengendalian ph


10 Sensor ph meter Elektroda ph
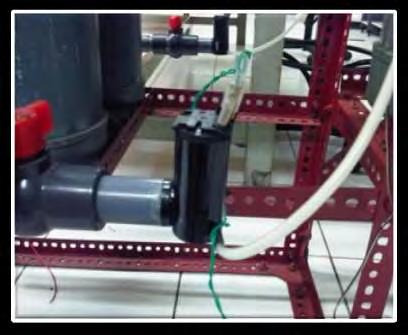
11 Aktuator

12 Mikrokontroler & motor driver
13 Skema Plant
14 Diagram blok fuzzy PID gain scheduling control
15 Input Kondisi error ini, dibagi menjadi tiga kelompok, yaitu : Error negative, yaitu kondisi dimana nilai variabel terukur bernilai lebih besar daripada setpoint. Error positif, yaitu kondisi dimana nilai variabel terukur lebih kecil dari nilai setpoint. Error bernilai mendekati nol, atau berada pada daerah setpoint.
16 Fuzzy keanggotaan variabel error
17 Fuzzy keanggotaan variabel Δerror
18 Basis Aturan Ketika e > 0,Δe < 0 dan e besar, untuk menjaga respon yang cepat dan mengurangi error absolut dalam waktu yang maksimum, Kp dan Ki lebih besar, Kd lebih kecil; dengan berkurangnya nilai error, untuk mencegah overshoot yang terlalu besar, Kd dan Kp seharusnya ditambahkan, Ki dikurangi, atau bahkan, Ki seharusnya dihilangkan. Ketika e < 0,Δe < 0, sistem mengalami over steadystate dan error terus meningkat, dengan tujuan untuk mengurangi overshoot, Kd dan Ki seharusnya lebih besar, Kp lebih kecil. Ketika e < 0,Δe > 0, sistem mengalami fase cenderung steady-state, Kp seharusnya lebih besar nilainya dengan tujuan untuk meningkatkan kecepatan respon dan kemudian mencapai keadaan steadystate dengan cepat; Kd ditambahkan untuk mengurangi overshoot; Ki dikurangi untuk menghindari osilasi yang disebabkan oleh overshoot integral. Ketika e > 0,Δe > 0, overshoot dari sistem bernilai negative atau dengankata lain mengalami undershoot. Saat error meningkat, Kd seharusnya bernilai lebih besar, ketika error mencapai nilai maksimumnya dan sistem cenderung steady-state, Kd dan Kp seharusnya dikurangi, Ki ditambah.
19 Tabel Basis Aturan Fuzzy untuk Kp KP E NB NS Z PS PB NB PB PM PM PS ZO NS PM PM PS ZO NM ΔE Z PM PM ZO NS NM PS PS ZO NS NS NM PB ZO NS NM NM NB
20 Tabel Basis Aturan Fuzzy untuk Ki E Ki NB NS ZO PS PB NB NB NB NM NM ZO NS NM NS NS ZO PS ΔE Z NM NS ZO PS PM PS NS ZO PS PS PM PB ZO PS PM PB PB
21 Tabel Basis Aturan Fuzzy untuk Kd E Kd NB NS Z PS PB NB PS ZO ZO ZO PB NS NB NM NS ZO PM ΔE Z NB NS NS ZO PM PS NB NS NS ZO PS PB PS ZO ZO ZO PB
22 Tinjauan Pustaka No Nama / tahun Judul Fokus Mode kontrol 1. Syahrizal Ismail, 2011 Rancang Bangun Auto Switch PID Pada Proses Netralisasi ph 2. B Hamed, M Al- Mobaied, Jan Richardo P. Gultom, Hendra Cordova, 2004 Fuzzy-PID Controllers Using FPGA Technique for Real Time DC Motor Speed Control Rancang Bangun Kontrol ph Berbasis Fuzzy Logic Control Auto Switch PID pada Tangki Netralisasi ph Auto switchpid (rancang bangun) Fuzzy-PID (Rancang Bangun) Fuzzy Logic Control (Rancang Bangun) Auto switchpid (simulasi) Fuzzy-PID Pada Kontrol ph
23 Jadwal Pelaksanaan Penelitian No Kegiatan 1 Pratinjau materi 2 Pembuatan proposal 3 Perancangan plant Bulan Februari Maret April Mei Juni Juli Pengujian sensor, actuator dan uji openloop 5 Pembuatan program dan HMI pada Visual Basic 6 Pengambilan data dan penerapan fuzzy-pid 7 Analisa data 8 Penyusunan Laporan
24 Respon Sistem tanpa controller

25 Uji performansi pada daerah 1

26 Uji performansi daerah 2

27 Uji performansi daerah 3
28 Uji Tracking
29 Kesimpulan Logika fuzzy berhasil diterapkan pada plant pengendali ph dengan input eror dan perubahan eror Overshoot paling tinggi terjadi pada daerah 2 Error steady state yang terjadi antara 2% - 5% pada ketiga daerah uji ph Dari grafik, sistem mampu mencapai setpoint pada ph asam, netral dan basa
30 Terima Kasih
Muhammad Riza A Pembimbing : Hendra Cordova ST, MT. NIP :
 Muhammad Riza A. 248 1 67 Pembimbing : Hendra Cordova ST, MT. NIP : 19695319941211 Latar Belakang Kontrol ph dilakukan untuk menjaga harga ph pada nilai tertentu yang diharapkan. Nilai ph dipengaruhi dari
Muhammad Riza A. 248 1 67 Pembimbing : Hendra Cordova ST, MT. NIP : 19695319941211 Latar Belakang Kontrol ph dilakukan untuk menjaga harga ph pada nilai tertentu yang diharapkan. Nilai ph dipengaruhi dari
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) 1-6 1
 1-6 1") JURNAL TEKNIK POMITS Vol., No., () - Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian (Studi Kasus : Konsentrasi Asam Lemah dan Basa Kuat) Fista Rachma Danianta, Hendra Cordova, ST, MT.
JURNAL TEKNIK POMITS Vol., No., () - Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian (Studi Kasus : Konsentrasi Asam Lemah dan Basa Kuat) Fista Rachma Danianta, Hendra Cordova, ST, MT.
Rancang Bangun Self Tuning PID Kontrol ph Dengan Metode Pencarian Akar Persamaan Karakteristik
 JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Self Tuning PID Kontrol ph Dengan Metode Pencarian Akar Persamaan Karakteristik Muhammad Riza Alaydrus, Hendra Cordova ST, MT. Jurusan Teknik
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Self Tuning PID Kontrol ph Dengan Metode Pencarian Akar Persamaan Karakteristik Muhammad Riza Alaydrus, Hendra Cordova ST, MT. Jurusan Teknik
Rancang Bangun Kontrol Logika Fuzzy-PID pada Plant Pengendalian ph (Studi Kasus: Konsentrasi Asam Lemah dan Basa Kuat)
") JURNAL TEKNIK POMITS Vol., No., () ISSN: 7-59 (-97 Print) F- Rancang Bangun Kontrol Logika Fuzzy-PID pada Plant Pengendalian (Studi Kasus: Konsentrasi Asam Lemah dan Basa Kuat) Fista Rachma Danianta dan
JURNAL TEKNIK POMITS Vol., No., () ISSN: 7-59 (-97 Print) F- Rancang Bangun Kontrol Logika Fuzzy-PID pada Plant Pengendalian (Studi Kasus: Konsentrasi Asam Lemah dan Basa Kuat) Fista Rachma Danianta dan
RANCANG BANGUN SELF TUNING PID KONTROL PH DENGAN METODE PENCARIAN AKAR PERSAMAAN KARAKTERISTIK
 RANCANG BANGUN SELF TUNING PID KONTROL PH DENGAN METODE PENCARIAN AKAR PERSAMAAN KARAKTERISTIK JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Self Tuning PID Kontrol ph Dengan Metode
RANCANG BANGUN SELF TUNING PID KONTROL PH DENGAN METODE PENCARIAN AKAR PERSAMAAN KARAKTERISTIK JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Self Tuning PID Kontrol ph Dengan Metode
PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER
 TUGAS AKHIR TE 091399 PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER 38-714 Nur Muhlis NRP 2208 100 662 JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut
TUGAS AKHIR TE 091399 PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER 38-714 Nur Muhlis NRP 2208 100 662 JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) 1-5 1
 1-5 1") JURNAL TEKNIK POMITS Vol. 1, No. 1, (13) 1-5 1 Rancang Bangun Auto Switch PID pada Sistem ILFM (In Line Flash Mixing) untuk Proses Netralisasi Hariadi kurniawan 1), Hendra Cordova S.T., M.T. 1) Jurusan
JURNAL TEKNIK POMITS Vol. 1, No. 1, (13) 1-5 1 Rancang Bangun Auto Switch PID pada Sistem ILFM (In Line Flash Mixing) untuk Proses Netralisasi Hariadi kurniawan 1), Hendra Cordova S.T., M.T. 1) Jurusan
RANCANG BANGUN KONTROL PH BERBASIS SELF TUNING PID MELALUI METODE ADAPTIVE CONTROL
 RANCANG BANGUN KONTROL PH BERBASIS SELF TUNING PID MELALUI METODE ADAPTIVE CONTROL JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Kontrol ph Berbasis Self Tuning PID Melalui Metode Adaptive
RANCANG BANGUN KONTROL PH BERBASIS SELF TUNING PID MELALUI METODE ADAPTIVE CONTROL JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Kontrol ph Berbasis Self Tuning PID Melalui Metode Adaptive
Rancang Bangun Auto Switch PID pada Sistem ILFM (In Line Flash Mixing) untuk Proses Netralisasi ph
 untuk Proses Netralisasi ph") JURNAL TEKNIK POMITS Vol., No., (13) ISSN: 337-3539 (31-971 Print) F-1 Rancang Bangun Auto Switch PID pada Sistem ILFM (In Line Flash Mixing) untuk Proses Netralisasi Hariadi Kurniawan dan Hendra Cordova
JURNAL TEKNIK POMITS Vol., No., (13) ISSN: 337-3539 (31-971 Print) F-1 Rancang Bangun Auto Switch PID pada Sistem ILFM (In Line Flash Mixing) untuk Proses Netralisasi Hariadi Kurniawan dan Hendra Cordova
Herry gunawan wibisono Pembimbing : Ir. Syamsul Arifin, MT
 PERANCANGAN SISTEM PENGENDALIAN DAYA REAKTOR NUKLIR MENGGUNAKAN LOGIKA FUZZY DI PUSAT TEKNOLOGI NUKLIR BAHAN DAN RADIOMETRI BADAN TENAGA NUKLIR NASIONAL (PTNBR BATAN) BANDUNG Herry gunawan wibisono 2406
PERANCANGAN SISTEM PENGENDALIAN DAYA REAKTOR NUKLIR MENGGUNAKAN LOGIKA FUZZY DI PUSAT TEKNOLOGI NUKLIR BAHAN DAN RADIOMETRI BADAN TENAGA NUKLIR NASIONAL (PTNBR BATAN) BANDUNG Herry gunawan wibisono 2406
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
 JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
RANCANG BANGUN PENGENDALIAN ph PADA INLINE FLASH MIXING DENGAN METODE NEURO-REGULATOR CONTROLLER. Dosen Pembimbing : Hendra Cordova, ST, MT.
 RANCANG BANGUN PENGENDALIAN ph PADA INLINE FLASH MIXING DENGAN METODE NEURO-REGULATOR CONTROLLER Dosen Pembimbing : Hendra Cordova, ST, MT. Dalam dunia industri, penetralan ph merupakan hal penting. Sebagai
RANCANG BANGUN PENGENDALIAN ph PADA INLINE FLASH MIXING DENGAN METODE NEURO-REGULATOR CONTROLLER Dosen Pembimbing : Hendra Cordova, ST, MT. Dalam dunia industri, penetralan ph merupakan hal penting. Sebagai
Rancang Bangun Auto Switch PID Dengan Feedforward Feedback Control Sebagai Pengendali ph
 1 Rancang Bangun Auto Switch PID Dengan Feedforward Feedback Control Sebagai Pengendali ph Ahmad Novrizal 1) Hendra Cordova 2) 1) Department of Engineering Physics, Faculty of Industrial Technology ITS
1 Rancang Bangun Auto Switch PID Dengan Feedforward Feedback Control Sebagai Pengendali ph Ahmad Novrizal 1) Hendra Cordova 2) 1) Department of Engineering Physics, Faculty of Industrial Technology ITS
BAB IV PENGUJIAN DAN ANALISA
 BAB IV PENGUJIAN DAN ANALISA Pengujian dan analisa sistem merupakan tahap akhir dari realisasi pengendali PID pada pendulum terbalik menggunakan mikrokontroller ATmega8 agar dapat dilinearkan disekitar
BAB IV PENGUJIAN DAN ANALISA Pengujian dan analisa sistem merupakan tahap akhir dari realisasi pengendali PID pada pendulum terbalik menggunakan mikrokontroller ATmega8 agar dapat dilinearkan disekitar
PENERAPAN FUZZY LOGIC CONTROLLER UNTUK MEMPERTAHANKAN KESETABILAN SISTEM AKIBAT PERUBAHAN DEADTIME PADA SISTEM KONTROL PROSES DENGAN DEADTIME
 PENERAPAN FUZZY LOGIC CONTROLLER UNTUK MEMPERTAHANKAN KESETABILAN SISTEM AKIBAT PERUBAHAN DEADTIME PADA SISTEM KONTROL PROSES DENGAN DEADTIME Mukhtar Hanafi Program Studi Teknik Informatika Fakultas Teknik
PENERAPAN FUZZY LOGIC CONTROLLER UNTUK MEMPERTAHANKAN KESETABILAN SISTEM AKIBAT PERUBAHAN DEADTIME PADA SISTEM KONTROL PROSES DENGAN DEADTIME Mukhtar Hanafi Program Studi Teknik Informatika Fakultas Teknik
RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC
 RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC Dwiana Hendrawati Prodi Teknik Konversi Energi Jurusan Teknik Mesin Politeknik Negeri Semarang Jl. Prof. H. Sudarto, SH.,
RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC Dwiana Hendrawati Prodi Teknik Konversi Energi Jurusan Teknik Mesin Politeknik Negeri Semarang Jl. Prof. H. Sudarto, SH.,
pengendali Konvensional Time invariant P Proportional Kp
 Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
DAFTAR ISI. HALAMAN JUDUL... i. LEMBAR PENGESAHAN PEMBIMBING... ii. LEMBAR PENGESAHAN DOSEN PENGUJI... iii. HALAMAN PERSEMBAHAN...
 DAFTAR ISI HALAMAN JUDUL... i LEMBAR PENGESAHAN PEMBIMBING... ii LEMBAR PENGESAHAN DOSEN PENGUJI... iii HALAMAN PERSEMBAHAN... iv HALAMAN MOTTO... v KATA PENGANTAR... vii ABSTAKSI... ix DAFTAR ISI... x
DAFTAR ISI HALAMAN JUDUL... i LEMBAR PENGESAHAN PEMBIMBING... ii LEMBAR PENGESAHAN DOSEN PENGUJI... iii HALAMAN PERSEMBAHAN... iv HALAMAN MOTTO... v KATA PENGANTAR... vii ABSTAKSI... ix DAFTAR ISI... x
Pengaturan Kecepatan Motor Induksi Tiga Fasa dengan Metode PID Self Tuning Berdasarkan Fuzzy pada Rancangan Mobil Hybrid
 Pengaturan Kecepatan Motor Induksi Tiga Fasa dengan Metode PID Self Tuning Berdasarkan Fuzzy pada Rancangan Mobil Hybrid Septian Ekavandy #, Dedid Cahya Happyanto #2 # Jurusan Teknik Elektronika, Politeknik
Pengaturan Kecepatan Motor Induksi Tiga Fasa dengan Metode PID Self Tuning Berdasarkan Fuzzy pada Rancangan Mobil Hybrid Septian Ekavandy #, Dedid Cahya Happyanto #2 # Jurusan Teknik Elektronika, Politeknik
Makalah Seminar Tugas Akhir
 Makalah Seminar Tugas Akhir APLIKASI KENDALI MENGGUNAKAN SKEMA GAIN SCHEDULING UNTUK PENGENDALIAN SUHU CAIRAN PADA PLANT ELECTRIC WATER HEATER Ahmad Shafi Mukhaitir [1], Iwan Setiawan, S.T., M.T. [2],
Makalah Seminar Tugas Akhir APLIKASI KENDALI MENGGUNAKAN SKEMA GAIN SCHEDULING UNTUK PENGENDALIAN SUHU CAIRAN PADA PLANT ELECTRIC WATER HEATER Ahmad Shafi Mukhaitir [1], Iwan Setiawan, S.T., M.T. [2],
ANALISA SISTEM KENDALI FUZZY PADA CONTINUOUSLY VARIABLE TRANSMISSION (CVT) DENGAN DUA PENGGERAK PUSH BELT UNTUK MENINGKATKAN KINERJA CVT
 DENGAN DUA PENGGERAK PUSH BELT UNTUK MENINGKATKAN KINERJA CVT") ANALISA SISTEM KENDALI FUZZY PADA CONTINUOUSLY VARIABLE TRANSMISSION (CVT) DENGAN DUA PENGGERAK PUSH BELT UNTUK MENINGKATKAN KINERJA CVT Oleh : Agung Prasetya Adhayatmaka NRP 2108100521 Dosen Pembimbing
ANALISA SISTEM KENDALI FUZZY PADA CONTINUOUSLY VARIABLE TRANSMISSION (CVT) DENGAN DUA PENGGERAK PUSH BELT UNTUK MENINGKATKAN KINERJA CVT Oleh : Agung Prasetya Adhayatmaka NRP 2108100521 Dosen Pembimbing
Aplikasi Kendali PID Menggunakan Skema Gain Scheduling Untuk Pengendalian Suhu Cairan pada Plant Electric Water Heater
 Available online at TRANSMISI Website http://ejournal.undip.ac.id/index.php/transmisi TRANSMISI, 12 (1), 21, 27-32 Research Article Aplikasi Kendali Menggunakan Skema Gain Scheduling Untuk Pengendalian
Available online at TRANSMISI Website http://ejournal.undip.ac.id/index.php/transmisi TRANSMISI, 12 (1), 21, 27-32 Research Article Aplikasi Kendali Menggunakan Skema Gain Scheduling Untuk Pengendalian
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID
 UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
Perancangan Sistem Pengendalian Suhu Kumbung Jamur dengan Logika Fuzzy
 Perancangan Sistem Pengendalian Suhu Kumbung Jamur dengan Logika Fuzzy Dosen pembimbing : Hendra Cordova, ST, MT Mahendra Ega Higuitta- 24 08 100 054 Ekologi Jamur Tiram Pertumbuhan jamur tiram sangat
Perancangan Sistem Pengendalian Suhu Kumbung Jamur dengan Logika Fuzzy Dosen pembimbing : Hendra Cordova, ST, MT Mahendra Ega Higuitta- 24 08 100 054 Ekologi Jamur Tiram Pertumbuhan jamur tiram sangat
BAB III PERANCANGAN DAN PEMBUATAN SISTEM. Gambar 3. 1 Diagram Blok Sistem Kecepatan Motor DC
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
Perancangan Dan Implementasi Sistem Pengaturan Kecepatan Motor Bldc Menggunakan Kontroler Pi Berbasiskan Neural-Fuzzy Hibrida Adaptif
 F68 Perancangan Dan Implementasi Sistem Pengaturan Kecepatan Motor Bldc Menggunakan Kontroler Pi Berbasiskan Neural-Fuzzy Hibrida Adaptif Agung Setyadi Wicaksono, Rushdianto Effendie A. K., dan Eka Iskandar
F68 Perancangan Dan Implementasi Sistem Pengaturan Kecepatan Motor Bldc Menggunakan Kontroler Pi Berbasiskan Neural-Fuzzy Hibrida Adaptif Agung Setyadi Wicaksono, Rushdianto Effendie A. K., dan Eka Iskandar
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT)
") DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI. III, aspek keseluruhan dimulai dari Bab I hingga Bab III, maka dapat ditarik
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dibahs mengenai pengujian control reheat desuperheater yang telah dimodelkan pada matlab sebagaimana yang telah dibahas pada bab III, aspek
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dibahs mengenai pengujian control reheat desuperheater yang telah dimodelkan pada matlab sebagaimana yang telah dibahas pada bab III, aspek
IMPLEMENTASI SISTEM KENDALI KECEPATAN MOTOR ARUS SEARAH MENGGUNAKAN KENDALI PID BERBASIS PROGRAMMABLE LOGIC CONTROLER
 IMPLEMENTASI SISTEM KENDALI KECEPATAN MOTOR ARUS SEARAH MENGGUNAKAN KENDALI PID BERBASIS PROGRAMMABLE LOGIC CONTROLER Winarso*, Itmi Hidayat Kurniawan Program Studi Teknik Elektro FakultasTeknik, Universitas
IMPLEMENTASI SISTEM KENDALI KECEPATAN MOTOR ARUS SEARAH MENGGUNAKAN KENDALI PID BERBASIS PROGRAMMABLE LOGIC CONTROLER Winarso*, Itmi Hidayat Kurniawan Program Studi Teknik Elektro FakultasTeknik, Universitas
PERANCANGAN SISTEM KONTROL ph PADA SEMIBATCH REACTOR DENGAN MENGGUNAKANFUZZY LOGIC CONTROL UNTUK STUDI KASUS PENETRALAN CH3COOH DAN NaOH
 PERANCANGAN SISTEM KONTROL ph PADA SEMIBATCH REACTOR DENGAN MENGGUNAKANFUZZY LOGIC CONTROL UNTUK STUDI KASUS PENETRALAN CH3COOH DAN NaOH Roza Hamidyantoro, Hendra Cordova, Ronny Dwi Noriyati Jurusan Teknik
PERANCANGAN SISTEM KONTROL ph PADA SEMIBATCH REACTOR DENGAN MENGGUNAKANFUZZY LOGIC CONTROL UNTUK STUDI KASUS PENETRALAN CH3COOH DAN NaOH Roza Hamidyantoro, Hendra Cordova, Ronny Dwi Noriyati Jurusan Teknik
BAB II TINJAUAN PUSTAKA. Penelitian sebelumnya berjudul Feedforward Feedback Kontrol Sebagai
 BAB II TINJAUAN PUSTAKA 2.1 Studi Pustaka Penelitian sebelumnya berjudul Feedforward Feedback Kontrol Sebagai Pengontrol Suhu Menggunakan Proportional Integral berbasis Mikrokontroler ATMEGA 8535 [3].
BAB II TINJAUAN PUSTAKA 2.1 Studi Pustaka Penelitian sebelumnya berjudul Feedforward Feedback Kontrol Sebagai Pengontrol Suhu Menggunakan Proportional Integral berbasis Mikrokontroler ATMEGA 8535 [3].
IMPLEMENTASI MICROKONTROLLER UNTUK SISTEM KENDALI KECEPATAN BRUSHLESS DC MOTOR MENGGUNAKAN ALGORITMA HYBRID PID FUZZY
 Implementasi Microkontroller untuk Sistem Kendali Kecepatan (Kristiyono dkk.) IMPLEMENTASI MICROKONTROLLER UNTUK SISTEM KENDALI KECEPATAN BRUSHLESS DC MOTOR MENGGUNAKAN ALGORITMA HYBRID PID FUZZY Roedy
Implementasi Microkontroller untuk Sistem Kendali Kecepatan (Kristiyono dkk.) IMPLEMENTASI MICROKONTROLLER UNTUK SISTEM KENDALI KECEPATAN BRUSHLESS DC MOTOR MENGGUNAKAN ALGORITMA HYBRID PID FUZZY Roedy
3.5.1 Komponen jaringan syaraf Adaptif Neuro Fuzzy Inference System (ANFIS) Simulink MATLAB Mikrokontroler...
 Simulink MATLAB Mikrokontroler...") DAFTAR ISI HALAMAN PERSETUJUAN TESIS... i PERNYATAAN... ii KATA PENGANTAR... iii DAFTAR ISI... v DAFTAR TABEL... viii DAFTAR GAMBAR... ix INSTISARI... xii ABSTRACT... xiii BAB I PENDAHULUAN... 1 1.1 Latar
DAFTAR ISI HALAMAN PERSETUJUAN TESIS... i PERNYATAAN... ii KATA PENGANTAR... iii DAFTAR ISI... v DAFTAR TABEL... viii DAFTAR GAMBAR... ix INSTISARI... xii ABSTRACT... xiii BAB I PENDAHULUAN... 1 1.1 Latar
Rancang Bangun Pengendalian ph Pada Inline Flash Mixing Menggunakan Metode Neural Network Controller
 JURNAL TEKNIK POMITS Vol., No., (13) ISSN: 337-3539 (31-971 Print) F-177 Rancang Bangun Pengendalian Pada Inline Flash Mixing Menggunakan Metode Neural Network Controller Warin Gusena dan Hendra Cordova
JURNAL TEKNIK POMITS Vol., No., (13) ISSN: 337-3539 (31-971 Print) F-177 Rancang Bangun Pengendalian Pada Inline Flash Mixing Menggunakan Metode Neural Network Controller Warin Gusena dan Hendra Cordova
Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid
 Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid Made Rahmawaty, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid Made Rahmawaty, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI
 SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI Jourdan Septiansyah Efflan NRP. 2209100084 Dosen Pembimbing Ronny Mardiyanto, ST.,MT.,Ph.D. Ir. Djoko Purwanto,M.Eng.,Ph.D. JURUSAN
SISTEM KAMERA DENGAN PAN-TILT TRIPOD OTOMATIS UNTUK APLIKASI FOTOGRAFI Jourdan Septiansyah Efflan NRP. 2209100084 Dosen Pembimbing Ronny Mardiyanto, ST.,MT.,Ph.D. Ir. Djoko Purwanto,M.Eng.,Ph.D. JURUSAN
PERANCANGAN PID SEBAGAI PENGENDALI ph PADA CONTINUOUS STIRRED TANK REACTOR (CSTR)
") PERANCANGAN PID SEBAGAI PENGENDALI ph PADA CONTINUOUS STIRRED TANK REACTOR (CSTR) Fihir, Hendra Cordova Jurusan Teknik Fisika Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kampus ITS
PERANCANGAN PID SEBAGAI PENGENDALI ph PADA CONTINUOUS STIRRED TANK REACTOR (CSTR) Fihir, Hendra Cordova Jurusan Teknik Fisika Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kampus ITS
Institut Teknologi Sepuluh Nopember PERANCANGAN SISTEM PENGENDALIAN TEKANAN DAN FLOW UNTUK KEBUTUHAN REFUELING SYSTEM PADA DPPU JUANDA SURABAYA
 PERANCANGAN SISTEM PENGENDALIAN TEKANAN DAN FLOW UNTUK KEBUTUHAN REFUELING SYSTEM PADA DPPU JUANDA SURABAYA Oleh : ITS Institut Teknologi Sepuluh Nopember Arya Dwi Prayoga 2408100097 Pembimbing : Fitri
PERANCANGAN SISTEM PENGENDALIAN TEKANAN DAN FLOW UNTUK KEBUTUHAN REFUELING SYSTEM PADA DPPU JUANDA SURABAYA Oleh : ITS Institut Teknologi Sepuluh Nopember Arya Dwi Prayoga 2408100097 Pembimbing : Fitri
IV. PERANCANGAN SISTEM
 SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER
 KONTROLER") SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
Desain Kendali pada Sistem Steam Drum Boiler dengan Memperhitungkan Control Valve
 Desain Kendali pada Sistem Steam Drum Boiler dengan Memperhitungkan Control Valve ROFIKA NUR AINI 1206 100 017 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
Desain Kendali pada Sistem Steam Drum Boiler dengan Memperhitungkan Control Valve ROFIKA NUR AINI 1206 100 017 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK
 PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK Oleh : AHMAD ADHIM 2107100703 Dosen Pembimbing : Hendro Nurhadi, Dipl.-Ing., Ph.D. PENDAHULUAN LATAR BELAKANG Kebanyakan
PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK Oleh : AHMAD ADHIM 2107100703 Dosen Pembimbing : Hendro Nurhadi, Dipl.-Ing., Ph.D. PENDAHULUAN LATAR BELAKANG Kebanyakan
Hamzah Ahlul Fikri Jurusan Tehnik Elektro, FT, Unesa,
 Pengendalian Kecepatan Motor Induksi Tiga Fasa Menggunakan Kontrol Fuzzy Logic Hamzah Ahlul Fikri Jurusan Tehnik Elektro, FT, Unesa, email: fikrihamzahahlul@gmail.com Subuh Isnur Haryudo Jurusan Tehnik
Pengendalian Kecepatan Motor Induksi Tiga Fasa Menggunakan Kontrol Fuzzy Logic Hamzah Ahlul Fikri Jurusan Tehnik Elektro, FT, Unesa, email: fikrihamzahahlul@gmail.com Subuh Isnur Haryudo Jurusan Tehnik
PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO. Else Orlanda Merti Wijaya.
 PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO Else Orlanda Merti Wijaya S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : elsewijaya@mhs.unesa.ac.id
PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO Else Orlanda Merti Wijaya S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : elsewijaya@mhs.unesa.ac.id
Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini. Helmi Wiratran
 Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini 1 Helmi Wiratran 2209105020 2 Latarbelakang (1) Segway PT: Transportasi alternatif dengan
Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini 1 Helmi Wiratran 2209105020 2 Latarbelakang (1) Segway PT: Transportasi alternatif dengan
BAB I PENDAHULUAN Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Sistem kendali PID paling banyak digunakan dalam pengendalian di industri. Keberhasilan pengendali PID tergantung ketepatan dalam menentukan konstanta (penguatan) PID
BAB I PENDAHULUAN 1.1 Latar Belakang Sistem kendali PID paling banyak digunakan dalam pengendalian di industri. Keberhasilan pengendali PID tergantung ketepatan dalam menentukan konstanta (penguatan) PID
Proceeding Tugas Akhir-Januari
 Proceeding Tugas Akhir-Januari 214 1 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman, Trihastuti Agustinah Jurusan Teknik Elektro,
Proceeding Tugas Akhir-Januari 214 1 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman, Trihastuti Agustinah Jurusan Teknik Elektro,
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1
 1-6 1") JURNAL TEKNIK POMITS Vol. 1, No. 1, (212) 1-6 1 Perancangan Sistem Pengendalian Tekanan dan Laju Aliran pada Pipa Bahan Bakar untuk Kebutuhan Awal Pembakaran Gas Turbin di Pembangkit Listrik Tenaga Gas
JURNAL TEKNIK POMITS Vol. 1, No. 1, (212) 1-6 1 Perancangan Sistem Pengendalian Tekanan dan Laju Aliran pada Pipa Bahan Bakar untuk Kebutuhan Awal Pembakaran Gas Turbin di Pembangkit Listrik Tenaga Gas
Kontrol PID Pada Miniatur Plant Crane
 Konferensi Nasional Sistem & Informatika 2015 STMIK STIKOM Bali, 9 10 Oktober 2015 Kontrol PID Pada Miniatur Plant Crane E. Merry Sartika 1), Hardi Sumali 2) Jurusan Teknik Elektro Universitas Kristen
Konferensi Nasional Sistem & Informatika 2015 STMIK STIKOM Bali, 9 10 Oktober 2015 Kontrol PID Pada Miniatur Plant Crane E. Merry Sartika 1), Hardi Sumali 2) Jurusan Teknik Elektro Universitas Kristen
MINIATUR ALAT PENGENDALI SUHU RUANG PENGOVENAN BODY MOBIL MENGGUNAKAN KONTROLER PID BERBASIS PLC DENGAN SISTEM CASCADE
 MINIATUR ALAT PENGENDALI SUHU RUANG PENGOVENAN BODY MOBIL MENGGUNAKAN KONTROLER PID BERBASIS PLC DENGAN SISTEM CASCADE Dimas Okta Ardiansyah 1, Ir. Purwanto., MT 2, Ir.Bambang S.,MT 3. 1 Mahasiswa Teknik
MINIATUR ALAT PENGENDALI SUHU RUANG PENGOVENAN BODY MOBIL MENGGUNAKAN KONTROLER PID BERBASIS PLC DENGAN SISTEM CASCADE Dimas Okta Ardiansyah 1, Ir. Purwanto., MT 2, Ir.Bambang S.,MT 3. 1 Mahasiswa Teknik
Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy
 ABSTRAK Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
ABSTRAK Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: ( Print) 1
 ISSN: ( Print) 1") JURNAL TEKNIK POMITS Vol., No. 1, (13) ISSN: 337-3539 (31-971 Print) 1 Rancang Bangun Pengendalian Pada Inline Flash Mixing Menggunakan Metode Neural Network Controller Warin Gusena 1), Hendra Cordova,
JURNAL TEKNIK POMITS Vol., No. 1, (13) ISSN: 337-3539 (31-971 Print) 1 Rancang Bangun Pengendalian Pada Inline Flash Mixing Menggunakan Metode Neural Network Controller Warin Gusena 1), Hendra Cordova,
Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]
![Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]](/thumbs/75/72135311.jpg "Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]") 1 feedback, terutama dalam kecepatan tanggapan menuju keadaan stabilnya. Hal ini disebabkan pengendalian dengan feedforward membutuhkan beban komputasi yang relatif lebih kecil dibanding pengendalian dengan
1 feedback, terutama dalam kecepatan tanggapan menuju keadaan stabilnya. Hal ini disebabkan pengendalian dengan feedforward membutuhkan beban komputasi yang relatif lebih kecil dibanding pengendalian dengan
DESAIN SISTEM KENDALI TEMPERATUR UAP SUPERHEATER DENGAN METODE FUZZY SLIDING MODE CONTROL
 J. Math. and Its Appl. ISSN: 1829-605X Vol. 13, No. 1, Mei 2016, 37-48 DESAIN SISTEM KENDALI TEMPERATUR UAP SUPERHEATER DENGAN METODE FUZZY SLIDING MODE CONTROL Mardlijah 1, Mardiana Septiani 2,Titik Mudjiati
J. Math. and Its Appl. ISSN: 1829-605X Vol. 13, No. 1, Mei 2016, 37-48 DESAIN SISTEM KENDALI TEMPERATUR UAP SUPERHEATER DENGAN METODE FUZZY SLIDING MODE CONTROL Mardlijah 1, Mardiana Septiani 2,Titik Mudjiati
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA. Penelitian Terkait Perkembangan teknik pengendalian di dunia industri dewasa ini sangat pesat. Banyak penelitian yang telah dilakukan dalam rangka menemukan teknik kendali baru
BAB II TINJAUAN PUSTAKA. Penelitian Terkait Perkembangan teknik pengendalian di dunia industri dewasa ini sangat pesat. Banyak penelitian yang telah dilakukan dalam rangka menemukan teknik kendali baru
PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN
 PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN Nazrul Effendy 1), Masrul Solichin 2), Teuku Lukman Nur Hakim 3), Faisal Budiman 4) Jurusan Teknik Fisika, Fakultas
PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN Nazrul Effendy 1), Masrul Solichin 2), Teuku Lukman Nur Hakim 3), Faisal Budiman 4) Jurusan Teknik Fisika, Fakultas
IMPEMENTASI KONTROL PID DAN FUZZY LOGIC UNTUK SISTEM KONTROL KECEPATAN MOTOR DC SEBAGAI APLIKASI PRAKTIKUM KONTROL DIGITAL
 ISSN : 2355-9365 e-proceeding of Engineering : Vol.3, No.3 December 2016 Page 4135 IMPEMENTASI KONTROL PID DAN FUZZY LOGIC UNTUK SISTEM KONTROL KECEPATAN MOTOR DC SEBAGAI APLIKASI PRAKTIKUM KONTROL DIGITAL
ISSN : 2355-9365 e-proceeding of Engineering : Vol.3, No.3 December 2016 Page 4135 IMPEMENTASI KONTROL PID DAN FUZZY LOGIC UNTUK SISTEM KONTROL KECEPATAN MOTOR DC SEBAGAI APLIKASI PRAKTIKUM KONTROL DIGITAL
MAKALAH. Sistem Kendali. Implementasi Sistim Navigasi Wall Following. Mengguakan Kontrol PID. Dengan Metode Tuning Pada Robot Beroda
 MAKALAH Sistem Kendali Implementasi Sistim Navigasi Wall Following Mengguakan Kontrol PID Dengan Metode Tuning Pada Robot Beroda oleh : ALFON PRIMA 1101024005 PROGRAM STUDI TEKNIK LISTRIK JURUSAN TEKNIK
MAKALAH Sistem Kendali Implementasi Sistim Navigasi Wall Following Mengguakan Kontrol PID Dengan Metode Tuning Pada Robot Beroda oleh : ALFON PRIMA 1101024005 PROGRAM STUDI TEKNIK LISTRIK JURUSAN TEKNIK
BAB I PENDAHULUAN. 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Metode kendali nonlinier telah menjadi metode yang sangat penting dan sangat bermanfaat dalam dunia kendali selama beberapa dekade terakhir. Beberapa contoh metode
BAB I PENDAHULUAN 1.1 Latar Belakang Metode kendali nonlinier telah menjadi metode yang sangat penting dan sangat bermanfaat dalam dunia kendali selama beberapa dekade terakhir. Beberapa contoh metode
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
BAB I PENDAHULUAN. manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi
 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi yang semakin pesat dipicu oleh kebutuhan manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi perintah user dalam hal
BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi yang semakin pesat dipicu oleh kebutuhan manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi perintah user dalam hal
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api
 Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
BAB 1 PENDAHULUAN. pengujian nya, sebagai pengatur kecepatan menghasilkan steady state error yang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Mesin CNC (computer numerical controlled) adalah sebuah mesin yang diperintah oleh manusia untuk mengerjakan sesuatu yang telah di desain oleh computer. Mesin ini memiliki
BAB 1 PENDAHULUAN 1.1 Latar Belakang Mesin CNC (computer numerical controlled) adalah sebuah mesin yang diperintah oleh manusia untuk mengerjakan sesuatu yang telah di desain oleh computer. Mesin ini memiliki
DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID BERBASIS PLC PADA SISTEM KONTROL LEVEL CAIRAN COUPLED-TANK
 TUGAS AKHIR TE091399 Teknik Sistem Pengaturan Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013 DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID
TUGAS AKHIR TE091399 Teknik Sistem Pengaturan Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013 DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID
BAB I PENDAHULUAN. 1.1 Latar Belakang
 BAB I PENDAHULUAN BAB 1. 1.1 Latar Belakang Gerak terbang pada pesawat tanpa awak atau yang sering disebut Unmanned Aerial Vehicle (UAV) ada berbagais macam, seperti melayang (hovering), gerak terbang
BAB I PENDAHULUAN BAB 1. 1.1 Latar Belakang Gerak terbang pada pesawat tanpa awak atau yang sering disebut Unmanned Aerial Vehicle (UAV) ada berbagais macam, seperti melayang (hovering), gerak terbang
(Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC)
") (Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC) Latar Belakang Tujuan Tugas Akhir merancang sistem pengendalian kecepatan pada mobil listrik 2 1 Mulai No Uji sistem Studi literatur Marancang
(Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC) Latar Belakang Tujuan Tugas Akhir merancang sistem pengendalian kecepatan pada mobil listrik 2 1 Mulai No Uji sistem Studi literatur Marancang
Kontrol Kecepatan Motor Induksi Menggunakan Metode PID-Fuzzy
 Kontrol Kecepatan Motor Induksi Menggunakan Metode PID-Fuzzy Tianur -1 #1, Dedid Cahya Happiyanto -2 #2, Agus Indra Gunawan -3 #3, Rusminto Tjatur Widodo -4 #4 # Jurusan Teknik Elektronika, Politeknik
Kontrol Kecepatan Motor Induksi Menggunakan Metode PID-Fuzzy Tianur -1 #1, Dedid Cahya Happiyanto -2 #2, Agus Indra Gunawan -3 #3, Rusminto Tjatur Widodo -4 #4 # Jurusan Teknik Elektronika, Politeknik
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: ( Print) B-58
 ISSN: ( Print) B-58") JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-58 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman,
JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-58 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman,
Ir.Muchammad Ilyas Hs DONY PRASETYA ( ) DOSEN PEMBIMBING :
 DOSEN PEMBIMBING :") Perancangan Sistem Pengendalian Rasio Aliran Udara dan Bahan Bakar Pada Boiler Di Unit Utilitas PT. Trans Pacific Petrochemical Indotama (TPPI) Tuban Dengan Menggunakan Sistem Pengendali PID -Fuzzy OLEH
Perancangan Sistem Pengendalian Rasio Aliran Udara dan Bahan Bakar Pada Boiler Di Unit Utilitas PT. Trans Pacific Petrochemical Indotama (TPPI) Tuban Dengan Menggunakan Sistem Pengendali PID -Fuzzy OLEH
BAB III PERANCANGAN DAN PEMBUATAN SISTEM
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software maupun hardware yang digunakan untuk mendukung keseluruhan sistem
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software maupun hardware yang digunakan untuk mendukung keseluruhan sistem
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER
 BERBASIS LOGIC SOLVER") PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
GPENELITIAN MANDIRI RANCANG BANGUN SISTEM KENDALI MOTOR DC MENGGUNAKAN FUZZY LOGIC BERBASIS MIKROKONTROLER
 GPENELITIAN MANDIRI RANCANG BANGUN SISTEM KENDALI MOTOR DC MENGGUNAKAN FUZZY LOGIC BERBASIS MIKROKONTROLER Hendra Kusdarwanto Jurusan Fisika Unibraw Universitas Brawijaya Malang nra_kus@yahoo.com ABSTRAK
GPENELITIAN MANDIRI RANCANG BANGUN SISTEM KENDALI MOTOR DC MENGGUNAKAN FUZZY LOGIC BERBASIS MIKROKONTROLER Hendra Kusdarwanto Jurusan Fisika Unibraw Universitas Brawijaya Malang nra_kus@yahoo.com ABSTRAK
LEVEL DAN SISTEM PROTEKSI PADA PERTAMINA (PERSERO) RU IV CILACAP
 RU IV CILACAP") PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN SISTEM PROTEKSI PADA KNOCK OUT DRUM 260V106 DI PT PERTAMINA (PERSERO) RU IV CILACAP Oleh : Fitri Noer Laili (2406100034) Pembimbing : Hendra Cordova, ST, MT PENDAHULUAN
PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN SISTEM PROTEKSI PADA KNOCK OUT DRUM 260V106 DI PT PERTAMINA (PERSERO) RU IV CILACAP Oleh : Fitri Noer Laili (2406100034) Pembimbing : Hendra Cordova, ST, MT PENDAHULUAN
IMPLEMENTASI SENSOR KAPASITIF DALAM SISTEM KONTROL KADAR ETANOL
 TE 091399 IMPLEMENTASI SENSOR KAPASITIF DALAM SISTEM KONTROL KADAR ETANOL Peter Chondro 2210100136 Dosen Pembimbing: Dr. M. Rivai, ST., MT. Suwito, ST., MT. Bidang Studi Elektronika Jurusan Teknik Elektro
TE 091399 IMPLEMENTASI SENSOR KAPASITIF DALAM SISTEM KONTROL KADAR ETANOL Peter Chondro 2210100136 Dosen Pembimbing: Dr. M. Rivai, ST., MT. Suwito, ST., MT. Bidang Studi Elektronika Jurusan Teknik Elektro
PENGUKURAN KINERJA ALAT DESPICING DAN NETRALISASI PADA PROSES PENJERNIHAN MINYAK GORENG BEKAS
 PENGUKURAN KINERJA ALAT DESPICING DAN NETRALISASI PADA PROSES PENJERNIHAN MINYAK GORENG BEKAS Gita Widi Bhawika 1,*), Legowo Sulistijono 2), dan Herry Sudjendro 3) 1) Program Studi Magister Manajemen Teknologi,
PENGUKURAN KINERJA ALAT DESPICING DAN NETRALISASI PADA PROSES PENJERNIHAN MINYAK GORENG BEKAS Gita Widi Bhawika 1,*), Legowo Sulistijono 2), dan Herry Sudjendro 3) 1) Program Studi Magister Manajemen Teknologi,
Abdul Halim Dosen Pembimbing Dr. Trihastuti Agustinah, ST., MT
 Abdul Halim 22 05 053 Dosen Pembimbing Dr. Trihastuti Agustinah, ST., T JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 203 PENDAHULUAN PERANCANGAN HASIL
Abdul Halim 22 05 053 Dosen Pembimbing Dr. Trihastuti Agustinah, ST., T JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 203 PENDAHULUAN PERANCANGAN HASIL
PERANCANGAN SISTEM PENGENDALIAN TEMPERATUR MENGGUNAKAN ALGORITMA PID SELF TUNING
 PERANCANGAN SISTEM PENGENDALIAN TEMPERATUR MENGGUNAKAN ALGORITMA PID SELF TUNING BERBASIS FUZZY LOGIC PADA DESUPERHEATER DI UNIT UTILITAS TRANS PASIFIC PETROCHEMICAL INDOTAMA (TPPI) TUBAN ( Dicky Eka Andriansyah,
PERANCANGAN SISTEM PENGENDALIAN TEMPERATUR MENGGUNAKAN ALGORITMA PID SELF TUNING BERBASIS FUZZY LOGIC PADA DESUPERHEATER DI UNIT UTILITAS TRANS PASIFIC PETROCHEMICAL INDOTAMA (TPPI) TUBAN ( Dicky Eka Andriansyah,
FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC
 FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC Afriadi Rahman #1, Agus Indra G, ST, M.Sc, #2, Dr. Rusminto Tjatur W, ST, #3, Legowo S, S.ST, M.Sc #4 # Jurusan Teknik
FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC Afriadi Rahman #1, Agus Indra G, ST, M.Sc, #2, Dr. Rusminto Tjatur W, ST, #3, Legowo S, S.ST, M.Sc #4 # Jurusan Teknik
Uji tracking setpoint
 Validasi model Uji tracking setpoint Pengujian dilakukan dengan BOD konstan, yaitu 2200 mg/l. Untuk mencapai keadaan steady, sistem membutuhan waktu sekitar 30 jam. Sedangkan grafik kedua yang merupakan
Validasi model Uji tracking setpoint Pengujian dilakukan dengan BOD konstan, yaitu 2200 mg/l. Untuk mencapai keadaan steady, sistem membutuhan waktu sekitar 30 jam. Sedangkan grafik kedua yang merupakan
Kontroler Fuzzy-PI untuk Plant Coupled-Tank
 Kontroler Fuzzy-PI untuk Plant Coupled-Tank Mochamad Nur Qomarudin 1 Surabaya, 4 Mei 2013 Abstrak Saya awali dokumen ini dengan Nama Alloh, Tuhan Semesta Alam, Sang Maha Pengasih dan Maha Penyayang. Sebagian
Kontroler Fuzzy-PI untuk Plant Coupled-Tank Mochamad Nur Qomarudin 1 Surabaya, 4 Mei 2013 Abstrak Saya awali dokumen ini dengan Nama Alloh, Tuhan Semesta Alam, Sang Maha Pengasih dan Maha Penyayang. Sebagian
PERANCANGAN SISTEM PENGENDALIAN TEMPERATURE PADA REBOILER METANOL RECOVERY MENGGUNAKAN FUZZY GAIN SCHEDULING-PID DI PT. ETERINDO NUSA GRAHA GRESIK
 PERANCANGAN SISTEM PENGENDALIAN TEMPERATURE PADA REBOILER METANOL RECOVERY MENGGUNAKAN FUZZY GAIN SCHEDULING-PID DI PT. ETERINDO NUSA GRAHA GRESIK (Agus Handrian F, Syamsul Arifin, Roekmono) Jurusan Teknik
PERANCANGAN SISTEM PENGENDALIAN TEMPERATURE PADA REBOILER METANOL RECOVERY MENGGUNAKAN FUZZY GAIN SCHEDULING-PID DI PT. ETERINDO NUSA GRAHA GRESIK (Agus Handrian F, Syamsul Arifin, Roekmono) Jurusan Teknik
Perancangan Sistem Pengendalian Suhu Kumbung Jamur dengan Logika Fuzzy
 JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2337-3539 (2301-9271 Print) F-183 Perancangan Sistem Pengendalian Suhu Kumbung Jamur dengan Logika Fuzzy Mahendra Ega Higuitta dan Hendra Cordova Jurusan
JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2337-3539 (2301-9271 Print) F-183 Perancangan Sistem Pengendalian Suhu Kumbung Jamur dengan Logika Fuzzy Mahendra Ega Higuitta dan Hendra Cordova Jurusan
Teknik Sistem Pengaturan Teknik Elektro - Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
 Teknik Sistem Pengaturan Teknik Elektro - Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Perancangan Kontroler Fuzzy PD untuk Kontrol Toleransi Kesalahan Sensor Oleh Moch Hafid [2211 106
Teknik Sistem Pengaturan Teknik Elektro - Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Perancangan Kontroler Fuzzy PD untuk Kontrol Toleransi Kesalahan Sensor Oleh Moch Hafid [2211 106
Implementasi Metode Fuzzy Logic Controller Pada Kontrol Posisi Lengan Robot 1 DOF
 Implementasi Metode Fuzzy Logic Controller Pada Kontrol Posisi Lengan Robot 1 DOF ndik Yulianto 1), gus Salim 2), Erwin Sukma Bukardi 3) Prodi Teknik Elektro, Fakultas Teknologi Industri, Universitas Internasional
Implementasi Metode Fuzzy Logic Controller Pada Kontrol Posisi Lengan Robot 1 DOF ndik Yulianto 1), gus Salim 2), Erwin Sukma Bukardi 3) Prodi Teknik Elektro, Fakultas Teknologi Industri, Universitas Internasional
SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560
 1 SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560 Adityan Ilmawan Putra, Pembimbing 1: Purwanto, Pembimbing 2: Bambang Siswojo.
1 SISTEM PENGATURAN POSISI SUDUT PUTAR MOTOR DC PADA MODEL ROTARY PARKING MENGGUNAKAN KONTROLER PID BERBASIS ARDUINO MEGA 2560 Adityan Ilmawan Putra, Pembimbing 1: Purwanto, Pembimbing 2: Bambang Siswojo.
Desain Penyearah 1 Fase Dengan Power Factor Mendekati Unity Dan Memiliki Thd Minimum Menggunakan Kontrol Pid-Fuzzy Pada Boost Converter
 Desain Penyearah 1 Fase Dengan Power Factor Mendekati Unity Dan Memiliki Thd Minimum Menggunakan Kontrol Pid-Fuzzy Pada Boost Converter Ainur Rofiq N 1, Irianto 2, Setyo Suka Wahyu 3 1 Dosen Jurusan Teknik
Desain Penyearah 1 Fase Dengan Power Factor Mendekati Unity Dan Memiliki Thd Minimum Menggunakan Kontrol Pid-Fuzzy Pada Boost Converter Ainur Rofiq N 1, Irianto 2, Setyo Suka Wahyu 3 1 Dosen Jurusan Teknik
SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KONTROL BERBASIS LOGIKA FUZZY UNTUK MENGHINDARI BENDA ASING DI PERAIRAN TANJUNG PERAK
 SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KONTROL BERBASIS LOGIKA FUZZY UNTUK MENGHINDARI BENDA ASING DI PERAIRAN TANJUNG PERAK Oleh: Anita Faruchi 2407 100 048 Dosen Pembimbing: Dr. Ir. Aulia Siti Aisyah,
SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KONTROL BERBASIS LOGIKA FUZZY UNTUK MENGHINDARI BENDA ASING DI PERAIRAN TANJUNG PERAK Oleh: Anita Faruchi 2407 100 048 Dosen Pembimbing: Dr. Ir. Aulia Siti Aisyah,
BAB I PENDAHULUAN. Sistem kendali yang digunakan dunia industri maupun rumah tangga
 1 BAB I PENDAHULUAN 1. 1 Latar Belakang Sistem kendali yang digunakan dunia industri maupun rumah tangga sangat berkembang, seperti halnya sistem pengendalian air yang berada dalam satu tangki yang sering
1 BAB I PENDAHULUAN 1. 1 Latar Belakang Sistem kendali yang digunakan dunia industri maupun rumah tangga sangat berkembang, seperti halnya sistem pengendalian air yang berada dalam satu tangki yang sering
BAB IV SISTEM KENDALI DENGAN FUZZY LOGIC
 BAB IV SISTEM KENDALI DENGAN FUZZY LOGIC Salah satu penerapan logika fuzzy adalah sebagai pengendali pada sistem pengendali umpan balik negatif (Negative Feedback Control System). Secara blok diagram,
BAB IV SISTEM KENDALI DENGAN FUZZY LOGIC Salah satu penerapan logika fuzzy adalah sebagai pengendali pada sistem pengendali umpan balik negatif (Negative Feedback Control System). Secara blok diagram,
PEMODELAN SISTEM KONTROLER LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR INDUKSI MENGGUNAKAN PERANGKAT LUNAK MATLAB / SIMULINK
 1 JURNAL MATRIX VOL. 7, NO. 1, MARET 2017 PEMODELAN SISTEM KONTROLER LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR INDUKSI MENGGUNAKAN PERANGKAT LUNAK MATLAB / SIMULINK I Wayan Raka Ardana 1, I Putu Sutawinaya
1 JURNAL MATRIX VOL. 7, NO. 1, MARET 2017 PEMODELAN SISTEM KONTROLER LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR INDUKSI MENGGUNAKAN PERANGKAT LUNAK MATLAB / SIMULINK I Wayan Raka Ardana 1, I Putu Sutawinaya
SISTEM KENDALI HYBRID PID - LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR DC
 SISTEM KENDALI HYBRID PID - LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR DC Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
SISTEM KENDALI HYBRID PID - LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR DC Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
DESAIN PENYEARAH 1 FASE DENGAN POWER FACTOR MENDEKATI UNITY DAN MEMILIKI THD MINIMUM MENGGUNAKAN KONTROL PID-fuzzy PADA BOOST CONVERTER
 DESAIN PENYEARAH 1 FASE DENGAN POWER FACTOR MENDEKATI UNITY DAN MEMILIKI THD MINIMUM MENGGUNAKAN KONTROL PID-fuzzy PADA BOOST CONVERTER Ainur Rofiq N 1, Irianto 2, Setyo Suka Wahyu 3 1 Dosen Jurusan Teknik
DESAIN PENYEARAH 1 FASE DENGAN POWER FACTOR MENDEKATI UNITY DAN MEMILIKI THD MINIMUM MENGGUNAKAN KONTROL PID-fuzzy PADA BOOST CONVERTER Ainur Rofiq N 1, Irianto 2, Setyo Suka Wahyu 3 1 Dosen Jurusan Teknik
BAB IV SIMULASI STABILISASI INVERTED PENDULUM DENGAN MENGGUNAKAN PENGONTROL FUZZY
 BAB IV SIMULASI STABILISASI INVERTED PENDULUM DENGAN MENGGUNAKAN PENGONTROL FUZZY Pada bab ini, pertama-tama akan dijelaskan mengenai pemodelan stabilisasi sistem inverted pendulum menggunakan perangkat
BAB IV SIMULASI STABILISASI INVERTED PENDULUM DENGAN MENGGUNAKAN PENGONTROL FUZZY Pada bab ini, pertama-tama akan dijelaskan mengenai pemodelan stabilisasi sistem inverted pendulum menggunakan perangkat
SIMULATOR RESPON SISTEM UNTUK MENENTUKAN KONSTANTA KONTROLER PID PADA MEKANISME PENGENDALIAN TEKANAN
 SIMULATOR RESPON SISTEM UNTUK MENENTUKAN KONSTANTA KONTROLER PID PADA MEKANISME PENGENDALIAN TEKANAN Dwiana Hendrawati Prodi Teknik Konversi Energi Jurusan Teknik Mesin Politeknik Negeri Semarang Jl. Prof.
SIMULATOR RESPON SISTEM UNTUK MENENTUKAN KONSTANTA KONTROLER PID PADA MEKANISME PENGENDALIAN TEKANAN Dwiana Hendrawati Prodi Teknik Konversi Energi Jurusan Teknik Mesin Politeknik Negeri Semarang Jl. Prof.
PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN INTERLOCK STEAM DRUM DENGAN DUA ELEMEN KONTROL DI PT. INDONESIA POWER UBP SUB UNIT PERAK.
 PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN INTERLOCK STEAM DRUM DENGAN DUA ELEMEN KONTROL DI PT. INDONESIA POWER UBP SUB UNIT PERAK. Seminar Oleh : Wahid Abdurrahman 2409 105 006 Pembimbing : Hendra Cordova
PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN INTERLOCK STEAM DRUM DENGAN DUA ELEMEN KONTROL DI PT. INDONESIA POWER UBP SUB UNIT PERAK. Seminar Oleh : Wahid Abdurrahman 2409 105 006 Pembimbing : Hendra Cordova
Perancangan Coupled Fuzzy Logic Controller pada Prototipe Mesin Computer Numerical Control (CNC)
") Bidang Studi Teknik Sistem Pengaturan ITS Coupled Fuzzy Logic Controller pada Prototipe Mesin Computer Numerical Control (CNC) Nabilla Gustiviana 2208 100 189 Content Pendahuluan Sistem Pendahuluan Latar
Bidang Studi Teknik Sistem Pengaturan ITS Coupled Fuzzy Logic Controller pada Prototipe Mesin Computer Numerical Control (CNC) Nabilla Gustiviana 2208 100 189 Content Pendahuluan Sistem Pendahuluan Latar
DESAIN DAN IMPLEMENTASI KENDALI PID ADAPTIF PADA KECEPATAN MOTOR DC DESIGN AND IMPLEMENTATION OF ADAPTIVE PID CONTROL TO DC MOTOR SPEED
 DESAIN DAN IMPLEMENTASI KENDALI PID ADAPTIF PADA KECEPATAN MOTOR DC DESIGN AND IMPLEMENTATION OF ADAPTIVE PID CONTROL TO DC MOTOR SPEED Hardy Purnama Nurba 1, Erwin Susanto, S.T.,M.T.,PhD. 2, Agung Surya
DESAIN DAN IMPLEMENTASI KENDALI PID ADAPTIF PADA KECEPATAN MOTOR DC DESIGN AND IMPLEMENTATION OF ADAPTIVE PID CONTROL TO DC MOTOR SPEED Hardy Purnama Nurba 1, Erwin Susanto, S.T.,M.T.,PhD. 2, Agung Surya
KOMPARASI PERFORMA KENDALI ON-OFF DAN PID SEBAGAI AUTOMATIC VOLTAGE REGULATOR GENERATOR SINKRON DI PLTMH
 KOMPARASI PERFORMA KENDALI ON-OFF DAN PID SEBAGAI AUTOMATIC VOLTAGE REGULATOR GENERATOR SINKRON DI PLTMH Firdaus ), Herisajani 2), Desmiwarman n),2,3) Jurusan Teknik Elektro, Politeknik Negeri Padang,
KOMPARASI PERFORMA KENDALI ON-OFF DAN PID SEBAGAI AUTOMATIC VOLTAGE REGULATOR GENERATOR SINKRON DI PLTMH Firdaus ), Herisajani 2), Desmiwarman n),2,3) Jurusan Teknik Elektro, Politeknik Negeri Padang,