APLIKASI DRONE UAV & MULTIROTOR UNTUK PERKEBUNAN KELAPA SAWIT. Disusun Oleh: Agus Widanarko
|
|
|
- Shinta Jayadi
- 6 tahun lalu
- Tontonan:
Transkripsi
1 APLIKASI DRONE UAV & MULTIROTOR UNTUK PERKEBUNAN KELAPA SAWIT Disusun Oleh: Agus Widanarko FEBRUARI 2015
2 APLIKASI DRONE DI PERKEBUNAN 1. Survei Lapangan Untuk mengetahui kondisi areal dari udara terutama kondisi areal yang tidak dapat dilalui baik darat maupun air. Survey kondisi lahan baru Survey kondisi Sungai/Outlet Survey kondisi lahan masyarakat sekitar 2. Data Real Lapangan Untuk mengetahui kondisi terkini dilapangan (Update sesuai tanggal) Kondisi areal TB, TBM & TM (kondisi gawangan) Kondisi areal tergenang Kondisi serangan Hama Perhitungan Populasi Pokok




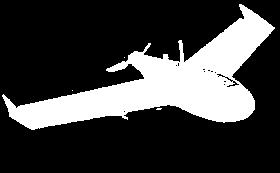







3 Drone UAV Fixed Wing Wing dan dan Multi Multi Rotor Rotor Fixed Wing Multi Rotor


4 Perbandingan UAV Fixed Wing dan Multi Rotor Fixed Wing UAV Fixed Wing memberikan keuntungan dalam hal jarak tempuh dan lama terbang dibanding multi rotor. Namun Fixed Wing membutuhkan lokasi terbuka yang luas untuk take-off maupun landing. UAV Fixed Wing cocok diaplikasikan untuk survei pemetaan skala luas seperti foto udara maupun survei lainnya. Multi Rotor UAV Multi Rotor cocok untuk pemetaan yang tidak mempunyai area terbuka luas untuk takeoff dan landing. Survei dengan multi rotor memberikan keuntungan terkait dengan tingkat kedetilan objek yang dapat diperoleh. Multi Rotor menggunakan beberapa motor sebagai penggeraknya, sehingga membutuhkan sumber tenaga lebih yang berakibat pada jangkauan dan lama terbang berkurang.
5 Perbandingan UAV Fixed Wing dan Multi Rotor Keterangan UAV Fixed Wing UAV Multi Rotor Luas Area Survei Efektif untuk area luas, berbentuk teratur Area tidak terlalu luas yang tidak teratur, dan area survei yang membutuhkan detil lebih fokus Fungsi Umum Survei Foto udara, survei topografi Survei dengan detil fokus lebih, seperti: digital surface model, engineering detailed surveying. Air Frame dan Sumber Tenaga Sumber Daya Manusia Air frame dapat melakukan glider (terbang layang) sehingga meminimalkan resiko jatuh, dapat terbang lebih lama karena motor yang digunakan minimal Waktu pelatihan untuk terbang relatif lebih lama. Maintenance lebih simple. Penggunaan banyak motor meningkatkan daya angkat (payload), namun waktu terbang lebih terbatas Waktu pelatihan untuk terbang relatif lebih singkat. Namun maintenance lebih rumit
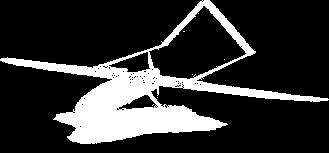
6 UAV Fixed Wing
7 Pengenalan UAV Sistem UAV


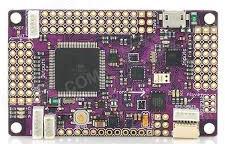





8 Pengenalan UAV Diagram dan Bagian UAV 1. Battery 2. Autopilot 3. GPS 4. Motor dan ESC 5. Radio to Modem 6. Radio to RC 7. Servo 8. Kamera


9 Prestasi Kerja Jarak tempuh UAV untuk 1 penerbangan adalah 45 km. Untuk resolusi spasial 1 Pixel = 8 cm, area pemotretan adalah seluas 250 Ha. Satu hari penerbangan maksimal 3x diperoleh luas area foto 600 Ha, karena setiap penerbangan dengan penerbangan lainnya membutuhkan area yang bertampalan. Luas area foto udara sangat berhubungan erat terhadap posisi take off/landing. Semakin jauh lokasi area pemotretan, semakin sedikit area terpotret Area Pemotretan

10 Cara Kerja UAV Persiapan: Desain Jalur Terbang
11 Specifications UAV No Item RBX02 Trimble UX5 1 Wingspan 2122 mm 1000 m 2 Body Length 765 mm 650 mm 3 Material EPP foam, Composite elements 4 Propulsion Electric pusher propeller; brushless 560 W motor EPP foam,carbon frame structure, Composite elements Electric pusher propeller; brushless 700 W motor 5 Endurance 50 minutes 50 minutes 6 Range 50 km (37.28 mi) 60 km (37.28 mi) 7 Cruise speed 80 kmh (49.71 mph) 60 kmh 80 kmh 8 Pre-flight system setup time 15 minutes 5 minutes
12 Specifications and Price UAV No Item RBX02 Trimble UX5 9 Weather limit 50 kmh and light rain 65 kmh and light rain 10 Recommend landing spacing 100 m x 50 m 50 m x 30 m 11 Communication and control range Up to 5 km 12 Image Quality 12 MP Pocket Camera Up to 5 km 16 MP DSLR Calibrated Camera 13 Battery 14.8 V mah mah 14 Coverage area GSD 8 cm/ flight 250 Ha 580 Ha 15 Number of Flight a day 3 flight 1 flight 16 Take off landing Manual-Fly by Wire Landing Automatic Landing 17 Price for Complete Unit USD USD


13 Melihat Kondisi Pondok & Populasi Pokok dengan UAV



14 Melihat Kondisi Jalan dengan UAV 62,30 m



15 Melihat Kondisi Areal Tergenang dengan UAV Area tergenang air
16 UAV Multi Rotor






17



18 JENIS DJI PHANTOM DEPARTEMEN RISET DJI Phantom 2 Vision DJI Phantom 2 Vision+ DJI Phantom 2
19 PERBANDINGAN Perbandingan DJI Phantom BERBAGAI JENIS DJI PHANTOM Keterangan DJI Phantom 2 Vis DJI Phantom 2 Vis + Lama Terbang 20 menit 10 menit 5 menit DJI Phantom 2 Kontrol Kamera Smartphone Smartphone Remote & RC Jangkauan Kontrol Kamera Tilting Range Of Gimbal 400 m 400 m 50 m Monitor Kamera Smartphone Smartphone LCD Monitor Resolusi Kamera 14 MP 14 MP 12 MP Price (2014) 2000 USD 2200 USD 1800 USD

20 HASIL Perbandingan FOTO DRONE DJI Phantom DENGAN DJI PHANTOM Populasi Pokok Tanaman

21 HASIL Perbandingan FOTO DRONE DJI Phantom DENGAN DJI PHANTOM Pondok/Kantor
PT.LINTAS ANANTARA NUSA DRONE MULTI PURPOSES.
 DRONE MULTI PURPOSES Multirotor merupakan salah satu jenis wahana terbang tanpa awak yang memiliki rotor lebih dari satu. Wahana ini memiliki kemampuan take-off dan landing secara vertical. Dibandingkan
DRONE MULTI PURPOSES Multirotor merupakan salah satu jenis wahana terbang tanpa awak yang memiliki rotor lebih dari satu. Wahana ini memiliki kemampuan take-off dan landing secara vertical. Dibandingkan
BAB III METODE PENELITIAN
 3.1 Lokasi Penelitian BAB III METODE PENELITIAN Lokasi penelitian bertempat di kawasan sebagian kawasan PLTA Garung lebih tepatnya mencakup dua Desa yaitu : Desa Tlogo dan Desa Kejajar, Kecamatan garung,
3.1 Lokasi Penelitian BAB III METODE PENELITIAN Lokasi penelitian bertempat di kawasan sebagian kawasan PLTA Garung lebih tepatnya mencakup dua Desa yaitu : Desa Tlogo dan Desa Kejajar, Kecamatan garung,
PERENCANAAN JALUR TERBANG TANPA PILOT PADA PROSES PENGUMPULAN DATA UNTUK PEMETAAN DENGAN PENERBANGAN TANPA AWAK
 ISSN 1858-4667 JURNAL LINK VOL. 27/No. 1/Februari 2018 PERENCANAAN JALUR TERBANG TANPA PILOT PADA PROSES PENGUMPULAN DATA UNTUK PEMETAAN DENGAN PENERBANGAN TANPA AWAK Maulana Rizqi Fakultas Ilmu Komputer
ISSN 1858-4667 JURNAL LINK VOL. 27/No. 1/Februari 2018 PERENCANAAN JALUR TERBANG TANPA PILOT PADA PROSES PENGUMPULAN DATA UNTUK PEMETAAN DENGAN PENERBANGAN TANPA AWAK Maulana Rizqi Fakultas Ilmu Komputer
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang UAV (Unmanned Aerial Vehicle) atau biasa disebut pesawat tanpa awak saat ini sedang mengalami perkembangan yang sangat pesat di dunia. Penggunaan UAV dikategorikan
BAB 1 PENDAHULUAN 1.1 Latar Belakang UAV (Unmanned Aerial Vehicle) atau biasa disebut pesawat tanpa awak saat ini sedang mengalami perkembangan yang sangat pesat di dunia. Penggunaan UAV dikategorikan
PLATFORM UNMANNED AERIAL VEHICLE UNTUK AERIAL PHOTOGRAPHY AEROMODELLING AND PAYLOAD TELEMETRY RESEARCH GROUP (APTRG)
") PLATFORM UNMANNED AERIAL VEHICLE UNTUK AERIAL PHOTOGRAPHY AEROMODELLING AND PAYLOAD TELEMETRY RESEARCH GROUP (APTRG) Nurmajid Setyasaputra *), Fajar Septian **), Riyadhi Fernanda **), Suharmin Bahri **),
PLATFORM UNMANNED AERIAL VEHICLE UNTUK AERIAL PHOTOGRAPHY AEROMODELLING AND PAYLOAD TELEMETRY RESEARCH GROUP (APTRG) Nurmajid Setyasaputra *), Fajar Septian **), Riyadhi Fernanda **), Suharmin Bahri **),
PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP 2 KRTI 2015
 PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP 2 KRTI 2015 Evaluasi tahap 2 KRTI 2015 ini meliputi Laporan Tertulis dan Video Terbang. 1. Ketentuan Laporan Tertulis Laporan tertulis diketik dengan font
PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP 2 KRTI 2015 Evaluasi tahap 2 KRTI 2015 ini meliputi Laporan Tertulis dan Video Terbang. 1. Ketentuan Laporan Tertulis Laporan tertulis diketik dengan font
"We know Exactly What You Need"
 FOTOUDARABUM[dot]COM "We know Exactly What You Need" l FOTO UDARA & AERIAL MAPPING l AERIAL VIDEO l 3D AERIAL MAPPING l INVENTARIS LAHAN About Us Sonvaldy Building Jl. Cempaka Putih Timur Raya No. 5 &
FOTOUDARABUM[dot]COM "We know Exactly What You Need" l FOTO UDARA & AERIAL MAPPING l AERIAL VIDEO l 3D AERIAL MAPPING l INVENTARIS LAHAN About Us Sonvaldy Building Jl. Cempaka Putih Timur Raya No. 5 &
AEROMODELLING COMPETITION HANDBOOK MECHANICAL & MARINE NATIONAL EXPOSITION 2016
 AEROMODELLING COMPETITION HANDBOOK MECHANICAL & MARINE NATIONAL EXPOSITION 2016 1. Ketentuan Umum Lomba Aeromodelling ini merupakan perlombaan model pesawat (fixed wing) yang dikontrol secara manual menggunakan
AEROMODELLING COMPETITION HANDBOOK MECHANICAL & MARINE NATIONAL EXPOSITION 2016 1. Ketentuan Umum Lomba Aeromodelling ini merupakan perlombaan model pesawat (fixed wing) yang dikontrol secara manual menggunakan
KARAKTERISTIK SISTEM WAHANA UDARA NIR-AWAK
 KARAKTERISTIK SISTEM WAHANA UDARA NIR-AWAK Sistem berbentuk modular yang memusahkan replacement apabila terjadi kerusakan Parachute Landing Tipe Airborne Platform Spesifikasi Teknis : - Type High-Wing
KARAKTERISTIK SISTEM WAHANA UDARA NIR-AWAK Sistem berbentuk modular yang memusahkan replacement apabila terjadi kerusakan Parachute Landing Tipe Airborne Platform Spesifikasi Teknis : - Type High-Wing
KATA PENGANTAR. Cikeas, Januari Penulis
 i KATA PENGANTAR Puji syukur kehadirat Tuhan Yang Maha Esa atas segala rahmat-nya sehingga Buku Panduan UAV ini dapat tersusun hingga selesai. Tidak lupa kami juga mengucapkan terimakasih kepada seluruh
i KATA PENGANTAR Puji syukur kehadirat Tuhan Yang Maha Esa atas segala rahmat-nya sehingga Buku Panduan UAV ini dapat tersusun hingga selesai. Tidak lupa kami juga mengucapkan terimakasih kepada seluruh
III. METODE PENELITIAN. Penelitian dan perancangan tugas akhir dilaksanakan mulai Agustus 2015
 III. METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian dan perancangan tugas akhir dilaksanakan mulai Agustus 2015 sampai Desember 2015 (jadwal dan aktifitas penelitian terlampir), bertempat di Laboratorium
III. METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian dan perancangan tugas akhir dilaksanakan mulai Agustus 2015 sampai Desember 2015 (jadwal dan aktifitas penelitian terlampir), bertempat di Laboratorium
BAB 1 PENDAHULUAN. wahana terbang tanpa awak, teknologi tersebut disebut Unmanned Aerial Vehicle
 1.1. Latar Belakang Masalah BAB 1 PENDAHULUAN Seiring perkembangan teknologi telekomunikasi dan dirgantara menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokasi tertentu
1.1. Latar Belakang Masalah BAB 1 PENDAHULUAN Seiring perkembangan teknologi telekomunikasi dan dirgantara menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokasi tertentu
TEKNOLOGI RIMS (RAPID IMAGING AND MAPPING SYSTEMS)
") TEKNOLOGI RIMS (RAPID IMAGING AND MAPPING SYSTEMS) MEMILIKI KEUNGGULAN: 1. LEBIH DETAIL, TAJAM, JELAS 2. PRODUKSI SKALA BESAR (1/1000) 3. BEBAS AWAN 4. MELAYANI LUAS AREA 5Ha 5000Ha 5. PROSES LEBIH CEPAT
TEKNOLOGI RIMS (RAPID IMAGING AND MAPPING SYSTEMS) MEMILIKI KEUNGGULAN: 1. LEBIH DETAIL, TAJAM, JELAS 2. PRODUKSI SKALA BESAR (1/1000) 3. BEBAS AWAN 4. MELAYANI LUAS AREA 5Ha 5000Ha 5. PROSES LEBIH CEPAT
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi UAV (Unmanned Aerial Vehicle) atau UAS (Unmanned Aircraft System) merupakan salah satu teknologi kedirgantaraan yang saat ini sedang berkembang dengan pesat.
BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi UAV (Unmanned Aerial Vehicle) atau UAS (Unmanned Aircraft System) merupakan salah satu teknologi kedirgantaraan yang saat ini sedang berkembang dengan pesat.
(LAPAN) LEMBAGA PENERBANGAN DAN ANTARIKSA NASIONAL
 LEMBAGA PENERBANGAN DAN ANTARIKSA NASIONAL") (LAPAN) LEMBAGA PENERBANGAN DAN ANTARIKSA NASIONAL ORGANISASI LAPAN PUSAT TEKNOLOGI PENERBANGAN 2011 - SEKARANG PUSAT TEKNOLOGI PENERBANGAN Lab. Avionik Lab. Propulsi Gedung Utama Lab. Aerostruktur Lab.
(LAPAN) LEMBAGA PENERBANGAN DAN ANTARIKSA NASIONAL ORGANISASI LAPAN PUSAT TEKNOLOGI PENERBANGAN 2011 - SEKARANG PUSAT TEKNOLOGI PENERBANGAN Lab. Avionik Lab. Propulsi Gedung Utama Lab. Aerostruktur Lab.
Ilustrasi: Proses Produksi
 Safety and Silently Ilustrasi: Perangkat RIMS dapat dibawa oleh tim kecil (BACKPACK). Surveyor akan merancang JALUR TERBANG sesuai kondisi dan arah angin. Wahana udara dirangkai di lapangan >> diterbangkan
Safety and Silently Ilustrasi: Perangkat RIMS dapat dibawa oleh tim kecil (BACKPACK). Surveyor akan merancang JALUR TERBANG sesuai kondisi dan arah angin. Wahana udara dirangkai di lapangan >> diterbangkan
MECHANICAL AND MARINE ENGINEERING NATIONAL EXPOSITION 2017 AEROMODELLING COMPETITION HANDBOOK
 Page 1 of 10 MECHANICAL AND MARINE ENGINEERING NATIONAL EXPOSITION 2017 1. Ketentuan Umum AEROMODELLING COMPETITION HANDBOOK Lomba Aeromodelling ini merupakan Perlombaan Model Pesawat (Fixed Wing) indoor
Page 1 of 10 MECHANICAL AND MARINE ENGINEERING NATIONAL EXPOSITION 2017 1. Ketentuan Umum AEROMODELLING COMPETITION HANDBOOK Lomba Aeromodelling ini merupakan Perlombaan Model Pesawat (Fixed Wing) indoor
MAPPING THE OUTERMOST SMALL ISLANDS UTILIZING UAV- BASED AERIAL PHOTOGRAPHY OUTLINE
 2013 2012 MAPPING THE OUTERMOST SMALL ISLANDS UTILIZING UAV- BASED AERIAL PHOTOGRAPHY OUTLINE Purposes The Situation UAV-Based Aerial Photography Result and Discussion Conclusion 1 Purposes Mapping the
2013 2012 MAPPING THE OUTERMOST SMALL ISLANDS UTILIZING UAV- BASED AERIAL PHOTOGRAPHY OUTLINE Purposes The Situation UAV-Based Aerial Photography Result and Discussion Conclusion 1 Purposes Mapping the
BAB I PENDAHULUAN. 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Dalam melakukan pengambilan gambar di udara, banyak media yang bisa digunakan dan dengan semakin berkembangnya teknologi saat ini terutama dalam ilmu pengetahuan, membuat
BAB I PENDAHULUAN 1.1 Latar Belakang Dalam melakukan pengambilan gambar di udara, banyak media yang bisa digunakan dan dengan semakin berkembangnya teknologi saat ini terutama dalam ilmu pengetahuan, membuat
BAB I PENDAHULUAN. 1 Universitas Internasional Batam
 BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat terbang model UAV (Unmanned Aerial Vehicle) telah berkembang dengan sangat pesat dan menjadi salah satu area penelitian yang diprioritaskan. Beberapa jenis
BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat terbang model UAV (Unmanned Aerial Vehicle) telah berkembang dengan sangat pesat dan menjadi salah satu area penelitian yang diprioritaskan. Beberapa jenis
BAB I PENDAHULUAN 1.1 Latar Belakang
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Ilmu pengetahuan dan teknologi dalam bidang robotika pada saat ini berkembang dengan sangat cepat. Teknologi robotika pada dasarnya dikembangkan dengan tujuan untuk
1 BAB I PENDAHULUAN 1.1 Latar Belakang Ilmu pengetahuan dan teknologi dalam bidang robotika pada saat ini berkembang dengan sangat cepat. Teknologi robotika pada dasarnya dikembangkan dengan tujuan untuk
PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP II KRTI 2017
 PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP II KRTI 2017 Evaluasi tahap II KRTI 2017 ini meliputi Laporan Tertulis dan Video Terbang. 1. Ketentuan Laporan Tertulis 1. Laporan tertulis diketik dengan
PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP II KRTI 2017 Evaluasi tahap II KRTI 2017 ini meliputi Laporan Tertulis dan Video Terbang. 1. Ketentuan Laporan Tertulis 1. Laporan tertulis diketik dengan
BAB III IMPLEMENTASI ALAT
 BAB III IMPLEMENTASI ALAT Hal-hal yang perlu dipersiapkan yaitu pengetahuan mengenai sistem yang direncanakan dan peralatan pendukung sistem yang akan digunakan. Perancangan sistem meliputi perancangan
BAB III IMPLEMENTASI ALAT Hal-hal yang perlu dipersiapkan yaitu pengetahuan mengenai sistem yang direncanakan dan peralatan pendukung sistem yang akan digunakan. Perancangan sistem meliputi perancangan
PERANCANGAN DAN IMPLEMENTASI KONTROLER FUZZY PREDIKTIF UNTUK TRACKING KETINGGIAN AKTUAL PADA UAV (UNMANNED AERIAL VEHICLE)
") PERANCANGAN DAN IMPLEMENTASI KONTROLER FUZZY PREDIKTIF UNTUK TRACKING KETINGGIAN AKTUAL PADA UAV (UNMANNED AERIAL VEHICLE) THORIKUL HUDA 2209106030 Dosen Pembimbing Ir. Rusdhianto Effendie A.K, M.T. 1
PERANCANGAN DAN IMPLEMENTASI KONTROLER FUZZY PREDIKTIF UNTUK TRACKING KETINGGIAN AKTUAL PADA UAV (UNMANNED AERIAL VEHICLE) THORIKUL HUDA 2209106030 Dosen Pembimbing Ir. Rusdhianto Effendie A.K, M.T. 1
BAB I PENDAHULUAN 1.1 Latar Belakang
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi pesawat tanpa awak (english : Unmanned Aerial Vehicle disingkat UAV) sangat pesat. Diperkirakan UAV akan berkembang secara signifikan pada
1 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi pesawat tanpa awak (english : Unmanned Aerial Vehicle disingkat UAV) sangat pesat. Diperkirakan UAV akan berkembang secara signifikan pada
METODE KALIBRASI IN-FLIGHT KAMERA DIGITAL NON-METRIK UNTUK KEPERLUAN CLOSE- RANGE PHOTOGRAMMETRY
 METODE KALIBRASI IN-FLIGHT KAMERA DIGITAL NON-METRIK UNTUK KEPERLUAN CLOSE- RANGE PHOTOGRAMMETRY Husnul Hidayat*, Agung Budi Cahyono, Mohammad Avicenna Departemen Teknik Geomatika FTSLK-ITS, Kampus ITS
METODE KALIBRASI IN-FLIGHT KAMERA DIGITAL NON-METRIK UNTUK KEPERLUAN CLOSE- RANGE PHOTOGRAMMETRY Husnul Hidayat*, Agung Budi Cahyono, Mohammad Avicenna Departemen Teknik Geomatika FTSLK-ITS, Kampus ITS
BAB I PENDAHULUAN Tujuan. Merancang dan merealisasikan pesawat terbang mandiri tanpa awak dengan empat. baling-baling penggerak.
 BAB I PENDAHULUAN 1.1. Tujuan Merancang dan merealisasikan pesawat terbang mandiri tanpa awak dengan empat baling-baling penggerak. 1.2. Latar Belakang Pesawat terbang tanpa awak atau UAV (Unmanned Aerial
BAB I PENDAHULUAN 1.1. Tujuan Merancang dan merealisasikan pesawat terbang mandiri tanpa awak dengan empat baling-baling penggerak. 1.2. Latar Belakang Pesawat terbang tanpa awak atau UAV (Unmanned Aerial
3.3.2 Perencanaan Jalur Terbang Perencanaan Pemotretan Condong Perencanaan Penerbangan Tahap Akuisisi Data...
 DAFTAR ISI 1. BAB I. PENDAHULUAN... 1 1.1 Latar Belakang... 1 1.2 Rumusan Masalah... 3 1.3 Pertanyaan Penelitian... 4 1.4 Tujuan Penelitian... 4 1.5 Manfaat Penelitian... 4 2. BAB II. TINJAUAN PUSTAKA...
DAFTAR ISI 1. BAB I. PENDAHULUAN... 1 1.1 Latar Belakang... 1 1.2 Rumusan Masalah... 3 1.3 Pertanyaan Penelitian... 4 1.4 Tujuan Penelitian... 4 1.5 Manfaat Penelitian... 4 2. BAB II. TINJAUAN PUSTAKA...
BAB I PENDAHULUAN 1.1 Latar Belakang Parrot AR. Drone
 BAB I PENDAHULUAN 1.1 Latar Belakang Quadrotor merupakan salah satu jenis Unmanned Aerial Vehicle (UAV) atau pesawat tanpa awak yang memiliki empat buah baling-baling (rotor) yang biasa juga disebut quadcopter.
BAB I PENDAHULUAN 1.1 Latar Belakang Quadrotor merupakan salah satu jenis Unmanned Aerial Vehicle (UAV) atau pesawat tanpa awak yang memiliki empat buah baling-baling (rotor) yang biasa juga disebut quadcopter.
BAB I PENDAHULUAN 1.1. Latar Belakang
 BAB I PENDAHULUAN 1.1. Latar Belakang Seiring perkembangan teknologi telekomunikasi dan dirgantara dapat menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokal tertentu dengan
BAB I PENDAHULUAN 1.1. Latar Belakang Seiring perkembangan teknologi telekomunikasi dan dirgantara dapat menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokal tertentu dengan
I. PENDAHULUAN. Wahana udara tanpa awak (WUT) merupakan alternatif dari pesawat berawak
 merupakan alternatif dari pesawat berawak") I. PENDAHULUAN 1.1. Latar Belakang Wahana udara tanpa awak (WUT) merupakan alternatif dari pesawat berawak untuk banyak keperluan penerbangan baik dibidang militer maupun sipil. Dibandingkan dengan wahana
I. PENDAHULUAN 1.1. Latar Belakang Wahana udara tanpa awak (WUT) merupakan alternatif dari pesawat berawak untuk banyak keperluan penerbangan baik dibidang militer maupun sipil. Dibandingkan dengan wahana
BAB I PENDAHULUAN 1.1 LATAR BELAKANG
 BAB I PENDAHULUAN 1.1 LATAR BELAKANG Seiring dengan berkembangnya permintaan akan pemetaan suatu wilayah dalam berbagai bidang, maka semakin berkembang pula berbagai macam metode pemetaan. Dengan memanfaatkan
BAB I PENDAHULUAN 1.1 LATAR BELAKANG Seiring dengan berkembangnya permintaan akan pemetaan suatu wilayah dalam berbagai bidang, maka semakin berkembang pula berbagai macam metode pemetaan. Dengan memanfaatkan
CV. DIVISION AERO COMPANY PROFILE
 CV. DIVISION AERO COMPANY PROFILE Penyedia Barang & Jasa Di Bidang Survei Pemetaan Foto Udara Menggunakan Unmanned Aerial Vehicle (UAV) & Drone Multicopter 2 0 1 7 DAFTAR ISI Kata Pengantar... 1 Legalitas
CV. DIVISION AERO COMPANY PROFILE Penyedia Barang & Jasa Di Bidang Survei Pemetaan Foto Udara Menggunakan Unmanned Aerial Vehicle (UAV) & Drone Multicopter 2 0 1 7 DAFTAR ISI Kata Pengantar... 1 Legalitas
APLIKASI FOTO UDARA UNTUK MEMPREDIKSI POTENSI SAWAH KOTA SOLOK DENGAN MENGGUNAKAN PESAWAT TANPA AWAK ABSTRAK
 APLIKASI FOTO UDARA UNTUK MEMPREDIKSI POTENSI SAWAH KOTA SOLOK DENGAN MENGGUNAKAN PESAWAT TANPA AWAK Fakultas Teknologi Pertanian Universitas Andalas, Padang, Sumatera Barat 25163, Indonesia E-mail: fadliirsyad_ua@yahoo.com
APLIKASI FOTO UDARA UNTUK MEMPREDIKSI POTENSI SAWAH KOTA SOLOK DENGAN MENGGUNAKAN PESAWAT TANPA AWAK Fakultas Teknologi Pertanian Universitas Andalas, Padang, Sumatera Barat 25163, Indonesia E-mail: fadliirsyad_ua@yahoo.com
Oghy Octori 1, Agung Budi Cahyono 1 1 Jurusan Teknik Geomatika FTSP Institut Teknologi Sepuluh Nopember
 FOTO UDARA MENGGUNAKAN WAHANA UAV JENIS FIX WING AERIAL PHOTOGRAPHY USING FIXED WING UAV Oghy Octori 1, Agung Budi Cahyono 1 1 Jurusan Teknik Geomatika FTSP Institut Teknologi Sepuluh Nopember Email: oghyoctori92@gmail.com
FOTO UDARA MENGGUNAKAN WAHANA UAV JENIS FIX WING AERIAL PHOTOGRAPHY USING FIXED WING UAV Oghy Octori 1, Agung Budi Cahyono 1 1 Jurusan Teknik Geomatika FTSP Institut Teknologi Sepuluh Nopember Email: oghyoctori92@gmail.com
BAB 1 PENDAHULUAN. 1.1 Latar belakang
 BAB 1 PENDAHULUAN 1.1 Latar belakang Peta adalah sebuah media untuk menampilkan atau merepresentasikan sebuah tempat diatas permukaan bumi ke bidang datar. Peta yang disajikan selama ini masih berupa peta
BAB 1 PENDAHULUAN 1.1 Latar belakang Peta adalah sebuah media untuk menampilkan atau merepresentasikan sebuah tempat diatas permukaan bumi ke bidang datar. Peta yang disajikan selama ini masih berupa peta
Langkah-langkah Photo dan Shoot Video Dengan Drone DJI Phantom 3 atau 4
 Langkah-langkah Photo dan Shoot Video Dengan Drone DJI Phantom 3 atau 4 PHOTOGRAPHY dan VIDEOGRAPHY Dengan DRONE PHOTOGRAPHY dan VIDEOGRAPHY dengan Drone Penggunaan drone dalam aerial photography kini
Langkah-langkah Photo dan Shoot Video Dengan Drone DJI Phantom 3 atau 4 PHOTOGRAPHY dan VIDEOGRAPHY Dengan DRONE PHOTOGRAPHY dan VIDEOGRAPHY dengan Drone Penggunaan drone dalam aerial photography kini
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi informasi saat ini sudah semakin maju, hal ini juga berkaitan erat dengan perkembangan peta yang saat ini berbentuk digital. Peta permukaan bumi
BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi informasi saat ini sudah semakin maju, hal ini juga berkaitan erat dengan perkembangan peta yang saat ini berbentuk digital. Peta permukaan bumi
Penilaian Cepat Perubahan Lingkungan Pasca Kejadian Bencana dengan Wahana Udara Tanpa Awak
 Jurnal Sains dan Teknologi Lingkungan ISSN: 2085-1227 Volume 6, Nomor 2, Juni 2014 Hal. 117-125 Penilaian Cepat Perubahan Lingkungan Pasca Kejadian Bencana dengan Wahana Udara Tanpa Awak Catur Aries Rokhmana
Jurnal Sains dan Teknologi Lingkungan ISSN: 2085-1227 Volume 6, Nomor 2, Juni 2014 Hal. 117-125 Penilaian Cepat Perubahan Lingkungan Pasca Kejadian Bencana dengan Wahana Udara Tanpa Awak Catur Aries Rokhmana
PERANCANGAN DAN REALISASI FIXED WING UAV MENGGUNAKAN PANEL SURYA SEBAGAI ENERGI ALTERNATIF UNTUK SISTEM PENGISIAN DAYA
 PERANCANGAN DAN REALISASI FIXED WING UAV MENGGUNAKAN PANEL SURYA SEBAGAI ENERGI ALTERNATIF UNTUK SISTEM PENGISIAN DAYA Zenitawati NRP : 1122056 email : nit.not0303@gmail.com ABSTRAK Panel surya merupakan
PERANCANGAN DAN REALISASI FIXED WING UAV MENGGUNAKAN PANEL SURYA SEBAGAI ENERGI ALTERNATIF UNTUK SISTEM PENGISIAN DAYA Zenitawati NRP : 1122056 email : nit.not0303@gmail.com ABSTRAK Panel surya merupakan
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Perkembangan sistem ilmu pengetahuan dan teknologi semakin pesat di abad ke- 21 ini, khususnya dalam bidang penerbangan. Pada dekade terakhir dunia penerbangan mengalami
BAB 1 PENDAHULUAN 1.1 Latar Belakang Perkembangan sistem ilmu pengetahuan dan teknologi semakin pesat di abad ke- 21 ini, khususnya dalam bidang penerbangan. Pada dekade terakhir dunia penerbangan mengalami
Analisa Kalibrasi Kamera Sony Exmor Pada Nilai Orientasi Parameter Interior untuk Keperluan Pemetaan (FUFK)
") A160 Analisa Kalibrasi Kamera Sony Exmor Pada Nilai Orientasi Parameter Interior untuk Keperluan Pemetaan (FUFK) Mohammad Avicenna, Agung Budi Cahyono, dan Husnul Hidayat Departemen Teknik Geomatika, Fakultas
A160 Analisa Kalibrasi Kamera Sony Exmor Pada Nilai Orientasi Parameter Interior untuk Keperluan Pemetaan (FUFK) Mohammad Avicenna, Agung Budi Cahyono, dan Husnul Hidayat Departemen Teknik Geomatika, Fakultas
3 METODE PENELITIAN. c. Perangkat lunak Mission Planner. f. First Person View (FPV) Camera BOSCAMM
 Camera BOSCAMM") 3 METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian dan perancangan tugas akhir dilaksanakan mulai Januari 2015 sampai Juni 2015, bertempat di Laboratorium Teknik Elektronika, Laboratorium Terpadu Teknik
3 METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian dan perancangan tugas akhir dilaksanakan mulai Januari 2015 sampai Juni 2015, bertempat di Laboratorium Teknik Elektronika, Laboratorium Terpadu Teknik
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN BAB 1 1.1 Latar Belakang Pemetaan merupakan suatu kegiatan pengukuran, penghitungan dan penggambaran permukaan bumi di atas bidang datar dengan menggunakan metode pemetaan tertentu sehingga
BAB I PENDAHULUAN BAB 1 1.1 Latar Belakang Pemetaan merupakan suatu kegiatan pengukuran, penghitungan dan penggambaran permukaan bumi di atas bidang datar dengan menggunakan metode pemetaan tertentu sehingga
BAB I PENDAHULUAN. I.1 Latar Belakang
 BAB I PENDAHULUAN I.1 Latar Belakang PT Perkebunan Nusantara VIII (Persero), disingkat PTPN VIII merupakan perusahaan yang bergerak dibidang perkebunan. Perusahaan ini mengelolah perkebunan yang berada
BAB I PENDAHULUAN I.1 Latar Belakang PT Perkebunan Nusantara VIII (Persero), disingkat PTPN VIII merupakan perusahaan yang bergerak dibidang perkebunan. Perusahaan ini mengelolah perkebunan yang berada
I. PENDAHULUAN. Akhmad (2000) diartikan sebagai adanya bahan-bahan atau zat zat asing
 diartikan sebagai adanya bahan-bahan atau zat zat asing") I. PENDAHULUAN 1.1 Latar Belakang Masalah Pencemaran udara atau sering disebut dengan istilah polusi udara menurut Akhmad (2000) diartikan sebagai adanya bahan-bahan atau zat zat asing didalam udara yang
I. PENDAHULUAN 1.1 Latar Belakang Masalah Pencemaran udara atau sering disebut dengan istilah polusi udara menurut Akhmad (2000) diartikan sebagai adanya bahan-bahan atau zat zat asing didalam udara yang
Artikel. Pemanfaatan Pesawat Nir-Awak untuk Pemetaan Garis Pantai. Kerjasama BIG dan LAPAN
 Artikel tentang Pemanfaatan Pesawat Nir-Awak untuk Pemetaan Garis Pantai Kerjasama BIG dan LAPAN Pemanfaatan Pesawat Nir-awak untuk Pemetaan Garis Pantai Oleh: Nadya Oktaviani (Ndy) - 2015 Tempuran, Jawa
Artikel tentang Pemanfaatan Pesawat Nir-Awak untuk Pemetaan Garis Pantai Kerjasama BIG dan LAPAN Pemanfaatan Pesawat Nir-awak untuk Pemetaan Garis Pantai Oleh: Nadya Oktaviani (Ndy) - 2015 Tempuran, Jawa
SISTEM KENDALI POSISI DAN KETINGGIAN TERBANG PESAWAT QUADCOPTER A S R U L P
 SISTEM KENDALI POSISI DAN KETINGGIAN TERBANG PESAWAT QUADCOPTER A S R U L P2700213428 PROGRAM PASCASARJANA PROGRAM STUDI TEKNIK ELEKTRO UNIVERSITAS HASANUDDIN MAKASSAR 2014 ii DRAFT PROPOSAL JUDUL Sistem
SISTEM KENDALI POSISI DAN KETINGGIAN TERBANG PESAWAT QUADCOPTER A S R U L P2700213428 PROGRAM PASCASARJANA PROGRAM STUDI TEKNIK ELEKTRO UNIVERSITAS HASANUDDIN MAKASSAR 2014 ii DRAFT PROPOSAL JUDUL Sistem
IMPLEMENTASI DJI NAZA M-LITE PADA QUADCOPTER
 IMPLEMENTASI DJI NAZA M-LITE PADA QUADCOPTER Tri Bugo Prakoso Program Studi Mekatronika, Fakultas Teknik, Universitas Truojoyo Madura Jl. Raya Telang, PO.Box. 2 Kamal Bangkalan Madura Email : tribugo@gmail.com
IMPLEMENTASI DJI NAZA M-LITE PADA QUADCOPTER Tri Bugo Prakoso Program Studi Mekatronika, Fakultas Teknik, Universitas Truojoyo Madura Jl. Raya Telang, PO.Box. 2 Kamal Bangkalan Madura Email : tribugo@gmail.com
BAB I PENDAHULUAN. 1.1 Latar Belakang
 1.1 Latar Belakang BAB I PENDAHULUAN UAV yang merupakan kepanjangan dari Unmanned Aerial Vehicles, atau dalam kata lain DRONE adalah tipe pesawat terbang yang beroperasi dengan sendirinya tanpa seorang
1.1 Latar Belakang BAB I PENDAHULUAN UAV yang merupakan kepanjangan dari Unmanned Aerial Vehicles, atau dalam kata lain DRONE adalah tipe pesawat terbang yang beroperasi dengan sendirinya tanpa seorang
BAB I PENDAHULUAN. satunya adalah UAV atau sering kita sebut dengan Drone. menyebutnya dengan Drone adalah pesawat tanpa awak di dalamnya, UAV ini
 BAB I PENDAHULUAN 1.1. Latar Belakang Pembangunan tak akan pernah ada hentinya, terus tumbuh dan berkembang sesuai dengan tuntuan kebutuhan manusia dan perkembangan zaman. Banyak bangunan-bangunan tinggi
BAB I PENDAHULUAN 1.1. Latar Belakang Pembangunan tak akan pernah ada hentinya, terus tumbuh dan berkembang sesuai dengan tuntuan kebutuhan manusia dan perkembangan zaman. Banyak bangunan-bangunan tinggi
PERANCANGAN SISTEM TELE-NAVIGATION PADA PESAWAT TANPA AWAK (MICRO UAV)
") PERANCANGAN SISTEM TELE-NAVIGATION PADA PESAWAT TANPA AWAK (MICRO UAV) Agus Basukesti Sekolah Tinggi Teknologi Adisutjipto Email: Agus_basukesti@yahoo.com ABSTRAK Sistem navigasi pada pengoperasian pesawat
PERANCANGAN SISTEM TELE-NAVIGATION PADA PESAWAT TANPA AWAK (MICRO UAV) Agus Basukesti Sekolah Tinggi Teknologi Adisutjipto Email: Agus_basukesti@yahoo.com ABSTRAK Sistem navigasi pada pengoperasian pesawat
C I N I A. Survei dan Pemetaan Untuk Perencanaan Jaringan Gas Bumi Bagi Rumah Tangga Menggunakan Metode Terrestrial dan Fotogrametri Jarak Dekat
 C I N I A The 2 nd Conference on Innovation and Industrial Applications (CINIA 2016) Survei dan Pemetaan Untuk Perencanaan Jaringan Gas Bumi Bagi Rumah Tangga Menggunakan Metode Terrestrial dan Fotogrametri
C I N I A The 2 nd Conference on Innovation and Industrial Applications (CINIA 2016) Survei dan Pemetaan Untuk Perencanaan Jaringan Gas Bumi Bagi Rumah Tangga Menggunakan Metode Terrestrial dan Fotogrametri
Volume F3U-INA Radio Control Drone Racing Edisi 2017
 FEDERASI AERO SPORT INDONESIA PORDIRGA AEROMODELLING Volume F3U-INA Radio Control Drone Racing Edisi 2017 Efektif November 2017 F3U (FAI Provisional Class) - RC Multi-rotor FPV Racing Ref. SC4_Vol_F3_FPVRacing_15-3-17
FEDERASI AERO SPORT INDONESIA PORDIRGA AEROMODELLING Volume F3U-INA Radio Control Drone Racing Edisi 2017 Efektif November 2017 F3U (FAI Provisional Class) - RC Multi-rotor FPV Racing Ref. SC4_Vol_F3_FPVRacing_15-3-17
SYAHIDAL WAHID
 PEMANFAATAN GPS TERHADAP KENDALI OTOMATIS PADA DRONE PEMANTAU KEADAAN LALU LINTAS LAPORAN AKHIR Disusun Sebagai Salah Satu Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro Program
PEMANFAATAN GPS TERHADAP KENDALI OTOMATIS PADA DRONE PEMANTAU KEADAAN LALU LINTAS LAPORAN AKHIR Disusun Sebagai Salah Satu Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro Program
I. PENDAHULUAN. UAV (Unnmaned Aerial Vehicle) secara umum dapat diartikan sebuah wahana udara
 secara umum dapat diartikan sebuah wahana udara") I. PENDAHULUAN A. Latar Belakang UAV (Unnmaned Aerial Vehicle) secara umum dapat diartikan sebuah wahana udara jenis fixed-wing, rotary-wing, ataupun pesawat yang mampu mengudara pada jalur yang ditentukan
I. PENDAHULUAN A. Latar Belakang UAV (Unnmaned Aerial Vehicle) secara umum dapat diartikan sebuah wahana udara jenis fixed-wing, rotary-wing, ataupun pesawat yang mampu mengudara pada jalur yang ditentukan
Uji Terbang Autonomous Low Cost Fixed Wing UAV Menggunakan PID Compensator
 Available online at Website http://ejournal.undip.ac.id/index.php/rotasi Uji Terbang Autonomous Low Cost Fixed Wing UAV Menggunakan PID Compensator *Mochammad Ariyanto, Joga D. Setiawan, Munadi, Teguh
Available online at Website http://ejournal.undip.ac.id/index.php/rotasi Uji Terbang Autonomous Low Cost Fixed Wing UAV Menggunakan PID Compensator *Mochammad Ariyanto, Joga D. Setiawan, Munadi, Teguh
Rancang Bangun Model Quadcopter Dengan Control PID (Proportional Integral Derivative)
") Rancang Bangun Model Quadcopter Dengan Control PID (Proportional Integral Derivative) Sebagai Kendali Gerakan Hover Pada UAV (Unmanned Aerial Vehicle ) Quadcopter Abdul Jabbar Lubis Jurusan Teknik Informatika
Rancang Bangun Model Quadcopter Dengan Control PID (Proportional Integral Derivative) Sebagai Kendali Gerakan Hover Pada UAV (Unmanned Aerial Vehicle ) Quadcopter Abdul Jabbar Lubis Jurusan Teknik Informatika
BAB III METODE PENELITIAN
 22 BAB III METODE PENELITIAN 3.1 Lokasi dan Waktu Penelitian Penelitian mengenai analisis data Landsat 7 untuk estimasi umur tanaman kelapa sawit mengambil daerah studi kasus di areal perkebunan PTPN VIII
22 BAB III METODE PENELITIAN 3.1 Lokasi dan Waktu Penelitian Penelitian mengenai analisis data Landsat 7 untuk estimasi umur tanaman kelapa sawit mengambil daerah studi kasus di areal perkebunan PTPN VIII
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Wilayah persawahan di Indonesia cukup luas dengan hasilnya yang berbagai macam salah satunya padi. Padi merupakan tanaman pangan yang menjadi sumber bahan pokok pangan
BAB I PENDAHULUAN 1.1 Latar Belakang Wilayah persawahan di Indonesia cukup luas dengan hasilnya yang berbagai macam salah satunya padi. Padi merupakan tanaman pangan yang menjadi sumber bahan pokok pangan
PURWA RUPA UNMANNED AERIAL VEHICLE (UAV) SEBAGAI ALAT BANTU TIM PENYELAMAT DALAM PENCARIAN KORBAN HILANG DI HUTAN
 SEBAGAI ALAT BANTU TIM PENYELAMAT DALAM PENCARIAN KORBAN HILANG DI HUTAN") PURWA RUPA UNMANNED AERIAL VEHICLE (UAV) SEBAGAI ALAT BANTU TIM PENYELAMAT DALAM PENCARIAN KORBAN HILANG DI HUTAN Hafidz Aly Hidayat, Rousyan Faikar, Aristya Panggi Wijaya, Aip Saripudin, and Sumardi *)
PURWA RUPA UNMANNED AERIAL VEHICLE (UAV) SEBAGAI ALAT BANTU TIM PENYELAMAT DALAM PENCARIAN KORBAN HILANG DI HUTAN Hafidz Aly Hidayat, Rousyan Faikar, Aristya Panggi Wijaya, Aip Saripudin, and Sumardi *)
PEMANTAUAN PERTAMA PUNCAK MERAPI SETELAH ERUPSI 2010 MENGGUNAKAN PESAWAT NIR AWAK
 PEMANTAUAN PERTAMA PUNCAK MERAPI SETELAH ERUPSI 2010 MENGGUNAKAN PESAWAT NIR AWAK Pada tanggal 25-26 April 2012 lalu, sekelompok peneliti dari Pusat Teknologi Penerbangan (Pustekbang) LAPAN, F MIPA UGM,
PEMANTAUAN PERTAMA PUNCAK MERAPI SETELAH ERUPSI 2010 MENGGUNAKAN PESAWAT NIR AWAK Pada tanggal 25-26 April 2012 lalu, sekelompok peneliti dari Pusat Teknologi Penerbangan (Pustekbang) LAPAN, F MIPA UGM,
DAFTAR ISI. Hal i ii iii iv v vi vii
 DAFTAR ISI HALAMAN JUDUL... LEMBAR PERSETUJUAN PEMBIMBING. HALAMAN PENGESAHAN. PERNYATAAN. MOTTO... HALAMAN PERSEMBAHAN... KATA PENGANTAR... DAFTAR ISI... DAFTAR GAMBAR.. DAFTAR TABEL... DAFTAR LAMBANG
DAFTAR ISI HALAMAN JUDUL... LEMBAR PERSETUJUAN PEMBIMBING. HALAMAN PENGESAHAN. PERNYATAAN. MOTTO... HALAMAN PERSEMBAHAN... KATA PENGANTAR... DAFTAR ISI... DAFTAR GAMBAR.. DAFTAR TABEL... DAFTAR LAMBANG
KONTROL KESTABILAN QUADCOPTER DENGAN MENGGUNAKAN SENSOR GYROSCOPE ITG 3205 LAPORAN AKHIR. oleh : NURMANSYAH
 KONTROL KESTABILAN QUADCOPTER DENGAN MENGGUNAKAN SENSOR GYROSCOPE ITG 3205 LAPORAN AKHIR Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro Program Studi Teknik
KONTROL KESTABILAN QUADCOPTER DENGAN MENGGUNAKAN SENSOR GYROSCOPE ITG 3205 LAPORAN AKHIR Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro Program Studi Teknik
BAB IV ANALISA DAN PENGUJIAN ALAT
 BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Uji coba dan Analisa Tujuan dari pengujian tugas akhir ini adalah untuk mengetahui sampai sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebab
BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Uji coba dan Analisa Tujuan dari pengujian tugas akhir ini adalah untuk mengetahui sampai sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebab
Pemetaan Foto Udara Menggunakan Wahana Fix Wing UAV (Studi Kasus: Kampus ITS, Sukolilo)
") JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: 2337-3539 (2301-9271 Print) F-403 Pemetaan Foto Udara Menggunakan Wahana Fix Wing UAV (Studi Kasus: Kampus ITS, Sukolilo) Ahmad Solihuddin Al Ayyubi, Agung
JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: 2337-3539 (2301-9271 Print) F-403 Pemetaan Foto Udara Menggunakan Wahana Fix Wing UAV (Studi Kasus: Kampus ITS, Sukolilo) Ahmad Solihuddin Al Ayyubi, Agung
2 TINJAUAN PUSTAKA. Unmanned Surface Vehicle (USV) atau Autonomous Surface Vehicle (ASV)
 atau Autonomous Surface Vehicle (ASV)") 2 TINJAUAN PUSTAKA 2.1 Unmanned Surface Vehicle (USV) Unmanned Surface Vehicle (USV) atau Autonomous Surface Vehicle (ASV) merupakan sebuah wahana tanpa awak yang dapat dioperasikan pada permukaan air.
2 TINJAUAN PUSTAKA 2.1 Unmanned Surface Vehicle (USV) Unmanned Surface Vehicle (USV) atau Autonomous Surface Vehicle (ASV) merupakan sebuah wahana tanpa awak yang dapat dioperasikan pada permukaan air.
SURVEYING (CIV -104)
") SURVEYING (CIV -104) PERTEMUAN 15 : PERENCANAAN FOTO UDARA UNIVERSITAS PEMBANGUNAN JAYA Jl. Boulevard Bintaro Sektor 7, Bintaro Jaya Tangerang Selatan 15224 Format foto udara BEDA FOTO UDARA DAN PETA STEREOSKOPIS
SURVEYING (CIV -104) PERTEMUAN 15 : PERENCANAAN FOTO UDARA UNIVERSITAS PEMBANGUNAN JAYA Jl. Boulevard Bintaro Sektor 7, Bintaro Jaya Tangerang Selatan 15224 Format foto udara BEDA FOTO UDARA DAN PETA STEREOSKOPIS
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Pesawat tanpa awak atau sering disebut drone merupakan teknologi baru yang saat ini sedang berkembang pesat di dunia. Pesawat tanpa awak ini banyak dikembangkan dalam
BAB 1 PENDAHULUAN 1.1 Latar Belakang Pesawat tanpa awak atau sering disebut drone merupakan teknologi baru yang saat ini sedang berkembang pesat di dunia. Pesawat tanpa awak ini banyak dikembangkan dalam
Penggunaan Drone sebagai Media Digitasi Penggambaran 3 Dimensi Bangunan dan Pemetaan Kawasan
 TEMU ILMIAH IPLBI 2016 Penggunaan Drone sebagai Media Digitasi Penggambaran 3 Dimensi Bangunan dan Pemetaan Kawasan Studi Kasus Digitasi Kawasan Heritage Kampung Assegaf Palembang Muhammad Fajri Romdhoni
TEMU ILMIAH IPLBI 2016 Penggunaan Drone sebagai Media Digitasi Penggambaran 3 Dimensi Bangunan dan Pemetaan Kawasan Studi Kasus Digitasi Kawasan Heritage Kampung Assegaf Palembang Muhammad Fajri Romdhoni
Perancangan dan Implementasi Gerakan Hover pada Tricopter
 Jurnal ELEMENTER. Vol. 1, No. 1, Mei 2015 33 Jurnal Politeknik Caltex Riau http://jurnal.pcr.ac.id Perancangan dan Implementasi Gerakan Hover pada Tricopter Safagianjar 1, Jupri Yanda Zaira 2 dan Made
Jurnal ELEMENTER. Vol. 1, No. 1, Mei 2015 33 Jurnal Politeknik Caltex Riau http://jurnal.pcr.ac.id Perancangan dan Implementasi Gerakan Hover pada Tricopter Safagianjar 1, Jupri Yanda Zaira 2 dan Made
Perancangan Sistem Tele-Navigation Pada Pesawat Tanpa Awak(Micro UAV)
") Perancangan Sistem Tele-Navigation Pada Pesawat Tanpa Awak(Micro UAV) Agus Basukesti Sekolah Tinggi Teknologi Adisutjipto Jl Janti Blok R Lanud Adisutjipto Yogyakarta Agus_basukesti@yahoo.com Abstrak Sistem
Perancangan Sistem Tele-Navigation Pada Pesawat Tanpa Awak(Micro UAV) Agus Basukesti Sekolah Tinggi Teknologi Adisutjipto Jl Janti Blok R Lanud Adisutjipto Yogyakarta Agus_basukesti@yahoo.com Abstrak Sistem
BAB VI TINJAUAN MENGENAI APLIKASI AIRBORNE LIDAR
 63 BAB VI TINJAUAN MENGENAI APLIKASI AIRBORNE LIDAR Survey airborne LIDAR terdiri dari beberapa komponen alat, yaitu GPS, INS, dan laser scanner, yang digunakan dalam wahana terbang, seperti pesawat terbang
63 BAB VI TINJAUAN MENGENAI APLIKASI AIRBORNE LIDAR Survey airborne LIDAR terdiri dari beberapa komponen alat, yaitu GPS, INS, dan laser scanner, yang digunakan dalam wahana terbang, seperti pesawat terbang
Penerapan Sistem Kendali PID untuk KestabilanTwin- Tiltrotor dengan Metode DCM
 IJEIS, Vol.5, No.2, October 2015, pp. 145~154 ISSN: 2088-3714 145 Penerapan Sistem Kendali PID untuk KestabilanTwin- Tiltrotor dengan Metode DCM Andi Dharmawan 1, Sani Pramudita* 2 1 Jurusan Ilmu Komputer
IJEIS, Vol.5, No.2, October 2015, pp. 145~154 ISSN: 2088-3714 145 Penerapan Sistem Kendali PID untuk KestabilanTwin- Tiltrotor dengan Metode DCM Andi Dharmawan 1, Sani Pramudita* 2 1 Jurusan Ilmu Komputer
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Umumnya pesawat diklasifikasikan menjadi dua kategori yaitu sayap tetap (fix wing) dan sayap putar (rotary wing). Pada sayap putar pesawat tersebut dirancang
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Umumnya pesawat diklasifikasikan menjadi dua kategori yaitu sayap tetap (fix wing) dan sayap putar (rotary wing). Pada sayap putar pesawat tersebut dirancang
STEREOSKOPIS PARALAKS
 RENCANA TERBANG STEREOSKOPIS PARALAKS Paralaks adalah suatu istilah yang diberikan kepada adanya suatu pergerakan benda terhadap benda lainnya. Sebuah titik di A pada tanah, terpotret oleh sebuah pesawat
RENCANA TERBANG STEREOSKOPIS PARALAKS Paralaks adalah suatu istilah yang diberikan kepada adanya suatu pergerakan benda terhadap benda lainnya. Sebuah titik di A pada tanah, terpotret oleh sebuah pesawat
PENGONTROLAN MOTOR BRUSHLESS PADA QUADCOPTER MENGGUNAKAN ELECTRONIC SPEED CONTROL (ESC) LAPORAN AKHIR
 LAPORAN AKHIR") PENGONTROLAN MOTOR BRUSHLESS PADA QUADCOPTER MENGGUNAKAN ELECTRONIC SPEED CONTROL (ESC) LAPORAN AKHIR Disusun Untuk Menyelesaikan Pendidikan Program Diploma III Pada Jurusan Teknik Elektro Program Studi
PENGONTROLAN MOTOR BRUSHLESS PADA QUADCOPTER MENGGUNAKAN ELECTRONIC SPEED CONTROL (ESC) LAPORAN AKHIR Disusun Untuk Menyelesaikan Pendidikan Program Diploma III Pada Jurusan Teknik Elektro Program Studi
BAB I PENDAHULUAN Latar Belakang
 BAB I PENDAHULUAN 1.1. Latar Belakang Kelapa sawit merupakan tanaman dengan nilai ekonomis tinggi karena merupakan tumbuhan penghasil minyak maupun bahan bakar yang banyak dibutuhkan. Perkebunannya menghasilkan
BAB I PENDAHULUAN 1.1. Latar Belakang Kelapa sawit merupakan tanaman dengan nilai ekonomis tinggi karena merupakan tumbuhan penghasil minyak maupun bahan bakar yang banyak dibutuhkan. Perkebunannya menghasilkan
Pembuatan Model Quadcopter yang Dapat Mempertahankan Ketinggian Tertentu
 Jurnal Teknik Elektro, Vol. 9, No. 2, September 26, 49-55 ISSN 4-87X Pembuatan Model Quadcopter yang Dapat Mempertahankan Ketinggian Tertentu DOI:.9744/jte.9.2.49-55 Wili Kumara Juang, Lauw Lim Un Tung
Jurnal Teknik Elektro, Vol. 9, No. 2, September 26, 49-55 ISSN 4-87X Pembuatan Model Quadcopter yang Dapat Mempertahankan Ketinggian Tertentu DOI:.9744/jte.9.2.49-55 Wili Kumara Juang, Lauw Lim Un Tung
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Unmanned aerial vehicles (UAVs) atau wahana tanpa awak merupakan wahana terbang tanpa ada yang mengendalikan penerbangan wahana tersebut. Sebuah UAV dapat berupa pesawat
BAB 1 PENDAHULUAN 1.1 Latar Belakang Unmanned aerial vehicles (UAVs) atau wahana tanpa awak merupakan wahana terbang tanpa ada yang mengendalikan penerbangan wahana tersebut. Sebuah UAV dapat berupa pesawat
BAB I PENDAHULUAN 1.1. Latar Belakang
 1 BAB I PENDAHULUAN 1.1. Latar Belakang UAV (Unmanned Aireal Vehicle) adalah pesawat tanpa awak yang dapat berotasi secara mandiri atau dikendalikan dari jarak jauh oleh seorang pilot (Bone, 2003). Pada
1 BAB I PENDAHULUAN 1.1. Latar Belakang UAV (Unmanned Aireal Vehicle) adalah pesawat tanpa awak yang dapat berotasi secara mandiri atau dikendalikan dari jarak jauh oleh seorang pilot (Bone, 2003). Pada
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Sejarah Quadcopter Desainer pada awalnya bereksperimen dengan quadcopter, karena alternatif dari menggunakan helikopter dengan motor tunggal utamanya dan motor ekor untuk mengimbangi
BAB II LANDASAN TEORI 2.1 Sejarah Quadcopter Desainer pada awalnya bereksperimen dengan quadcopter, karena alternatif dari menggunakan helikopter dengan motor tunggal utamanya dan motor ekor untuk mengimbangi
Bab I Pendahuluan. I.1. Latar Belakang
 1 Bab I Pendahuluan I.1. Latar Belakang Identifikasi merupakan langkah strategis dalam menyukseskan suatu pekerjaan. (Supriadi, 2007). Tujuan pemerintah dalam rangka penertiban dan pendayagunaan tanah
1 Bab I Pendahuluan I.1. Latar Belakang Identifikasi merupakan langkah strategis dalam menyukseskan suatu pekerjaan. (Supriadi, 2007). Tujuan pemerintah dalam rangka penertiban dan pendayagunaan tanah
KASAU CUP AEROMODELLING SERIES 2016 PERATURAN UMUM LOMBA
 KASAU CUP AEROMODELLING SERIES 2016 PERATURAN UMUM LOMBA LANUD SULAIMAN [Company address] Sekretariat : E-mail : Kontak Person : Iskandar 0821 1241 9590 Yuyus BK 0821 1234 2007 Ade E Sumarsono 0816 6050
KASAU CUP AEROMODELLING SERIES 2016 PERATURAN UMUM LOMBA LANUD SULAIMAN [Company address] Sekretariat : E-mail : Kontak Person : Iskandar 0821 1241 9590 Yuyus BK 0821 1234 2007 Ade E Sumarsono 0816 6050
PERANCANGAN DAN PEMBUATAN RANGKA DRONE YANG EKONOMIS DAN PRAKTIS
 PERANCANGAN DAN PEMBUATAN RANGKA DRONE YANG EKONOMIS DAN PRAKTIS Syahril Sayuti 1*, Muhammad Soffan Hakim 2 1,2 Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Nasional Bandung Jalan
PERANCANGAN DAN PEMBUATAN RANGKA DRONE YANG EKONOMIS DAN PRAKTIS Syahril Sayuti 1*, Muhammad Soffan Hakim 2 1,2 Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Nasional Bandung Jalan
p o t r e t u d a r a
 SOFTWARE ada di dalam Micro-SD RTKLIB/ RTKCONV untuk konversi data LOG Rinex RTKLIB/RTKPOST untuk Post Processing (PPK) Program Android untuk instalasi program RTKGPS+ dan command nya Demo Proses Data
SOFTWARE ada di dalam Micro-SD RTKLIB/ RTKCONV untuk konversi data LOG Rinex RTKLIB/RTKPOST untuk Post Processing (PPK) Program Android untuk instalasi program RTKGPS+ dan command nya Demo Proses Data
TAHAPAN STUDI. Gambar 3-1 Kamera Nikon D5000
 BAB 3 TAHAPAN STUDI Dalam bab ini akan dibahas rangkaian prosedur yang dilakukan dalam penelitian ini yang dimulai dari peralatan yang digunakan, proses kalibrasi kamera, uji coba, dan pengambilan data
BAB 3 TAHAPAN STUDI Dalam bab ini akan dibahas rangkaian prosedur yang dilakukan dalam penelitian ini yang dimulai dari peralatan yang digunakan, proses kalibrasi kamera, uji coba, dan pengambilan data
BAB III TEKNOLOGI LIDAR DALAM PEKERJAAN EKSPLORASI TAMBANG BATUBARA
 BAB III TEKNOLOGI LIDAR DALAM PEKERJAAN EKSPLORASI TAMBANG BATUBARA 3.1 Kebutuhan Peta dan Informasi Tinggi yang Teliti dalam Pekerjaan Eksplorasi Tambang Batubara Seperti yang telah dijelaskan dalam BAB
BAB III TEKNOLOGI LIDAR DALAM PEKERJAAN EKSPLORASI TAMBANG BATUBARA 3.1 Kebutuhan Peta dan Informasi Tinggi yang Teliti dalam Pekerjaan Eksplorasi Tambang Batubara Seperti yang telah dijelaskan dalam BAB
keja pengendalian gulma secara manual tidak pernah dapat dicapai oleh tenaga kerja, ha1 ini disebabkan oleh kerapatan dan penutupan gulma.
 Marulak Erikson Butar-Butar. Pengelolaan Perkebunan Kelapa Sawit Dengan Aspek Khusus Pemeliharaan Tanaman di Perkebunan Kelapa Sawit P.T. Permata Hijau Sawit, Kebun Sosa Indah, Tapanuli Selatan (Di bawah
Marulak Erikson Butar-Butar. Pengelolaan Perkebunan Kelapa Sawit Dengan Aspek Khusus Pemeliharaan Tanaman di Perkebunan Kelapa Sawit P.T. Permata Hijau Sawit, Kebun Sosa Indah, Tapanuli Selatan (Di bawah
Terobosan baru metoda inventarisasi hutan: Ultra Aerial Photograph Ruandha Agung Sugardiman
 Terobosan baru metoda inventarisasi hutan: Ultra Aerial Photograph Ruandha Agung Sugardiman "A man must rise above the Earth to the top of the atmosphere and beyond, for only thus will he fully understand
Terobosan baru metoda inventarisasi hutan: Ultra Aerial Photograph Ruandha Agung Sugardiman "A man must rise above the Earth to the top of the atmosphere and beyond, for only thus will he fully understand
II. TINJAUAN PUSTAKA. tanpa awak yang saat ini banyak diteliti dibelahan dunia tak terkecuali
 II. TINJAUAN PUSTAKA 2.1 UAV (Unmanned Aerial Vehicle) Unmaned Aerial Vechile (UAV) merupakan sebuah teknologi wahana udara tanpa awak yang saat ini banyak diteliti dibelahan dunia tak terkecuali Indonesia
II. TINJAUAN PUSTAKA 2.1 UAV (Unmanned Aerial Vehicle) Unmaned Aerial Vechile (UAV) merupakan sebuah teknologi wahana udara tanpa awak yang saat ini banyak diteliti dibelahan dunia tak terkecuali Indonesia
BAB II TINJAUAN PUSTAKA. proses konstruksi yang sedang berlangsung. tanpa terkendala waktu, karena kapan pun drone ini dapat terbang dan melakukan
 BAB II TINJAUAN PUSTAKA 2.1. Umum Penggunaan robot di dunia konstruksi telah banyak dilakukan di negara-negara maju, hal ini bertujuan untuk mempermudah dan mempecepat proses konstruksi yang sedang berlangsung.
BAB II TINJAUAN PUSTAKA 2.1. Umum Penggunaan robot di dunia konstruksi telah banyak dilakukan di negara-negara maju, hal ini bertujuan untuk mempermudah dan mempecepat proses konstruksi yang sedang berlangsung.
BAB IV ANALISIS. Ditorsi radial jarak radial (r)
") BAB IV ANALISIS 4.1. Analisis Kalibrasi Kamera Analisis kalibrasi kamera didasarkan dari hasil percobaan di laboratorium dan hasil percobaan di lapangan. 4.1.1. Laboratorium Dalam penelitian ini telah
BAB IV ANALISIS 4.1. Analisis Kalibrasi Kamera Analisis kalibrasi kamera didasarkan dari hasil percobaan di laboratorium dan hasil percobaan di lapangan. 4.1.1. Laboratorium Dalam penelitian ini telah
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Penggunaan kendaraan bermotor khususnya di Indonesia kini semakin meningkat, hal itu menyebabkan polusi udara pada suatu perkotaan meningkat. Munculah banyak pergerakan
BAB I PENDAHULUAN 1.1 Latar Belakang Penggunaan kendaraan bermotor khususnya di Indonesia kini semakin meningkat, hal itu menyebabkan polusi udara pada suatu perkotaan meningkat. Munculah banyak pergerakan
BAB IV PENGUJIAN ALAT
 BAB IV PENGUJIAN ALAT 4.1. Menyalakan Modul APM Gambar 4.1 Modul APM Modul APM yang dipakai pada tugas akhir ini adalah modul Arduflyer versi 2.5, dengan merk RCTimer. Modul APM yang baru datang dalam
BAB IV PENGUJIAN ALAT 4.1. Menyalakan Modul APM Gambar 4.1 Modul APM Modul APM yang dipakai pada tugas akhir ini adalah modul Arduflyer versi 2.5, dengan merk RCTimer. Modul APM yang baru datang dalam
PENDAHULUAN Latar Belakang Parrot AR.Drone
 PENDAHULUAN Latar Belakang UAV (Unmanned Aerial Vehicle) atau pesawat tanpa awak atau drone adalah sebuah mesin yang mampu terbang dan dikendalikan oleh pilot dari jarak jauh. Pergerakan UAV sendiri dipengaruhi
PENDAHULUAN Latar Belakang UAV (Unmanned Aerial Vehicle) atau pesawat tanpa awak atau drone adalah sebuah mesin yang mampu terbang dan dikendalikan oleh pilot dari jarak jauh. Pergerakan UAV sendiri dipengaruhi
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1. Latar Belakang Masalah UAV (Unmanned Aerial Vehicle) adalah sebuah sistem pesawat udara yang tidak memiliki awak yang berada di dalam pesawat (onboard). Keberadaan awak pesawat digantikan
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah UAV (Unmanned Aerial Vehicle) adalah sebuah sistem pesawat udara yang tidak memiliki awak yang berada di dalam pesawat (onboard). Keberadaan awak pesawat digantikan
 PENGEMBANGAN DATA DAN INFORMASI TATA RUANG KABUPATEN/KOTA BERBASIS CITRA SATELIT DAN GIS PENGANTAR Pesatnya perkembangan teknologi informasi membawa perubahan yang besar di berbagai bidang termasuk bidang
PENGEMBANGAN DATA DAN INFORMASI TATA RUANG KABUPATEN/KOTA BERBASIS CITRA SATELIT DAN GIS PENGANTAR Pesatnya perkembangan teknologi informasi membawa perubahan yang besar di berbagai bidang termasuk bidang
PEMANFAATAN KAMERA CCTV SEBAGAI ALAT BANTU TRAFFIC SURVEY BIDANG : TRAFFIC ENGINEERING. Ressi Dyah Adriani NPP
 PEMANFAATAN KAMERA CCTV SEBAGAI ALAT BANTU TRAFFIC SURVEY BIDANG : TRAFFIC ENGINEERING Ressi Dyah Adriani NPP 10529 ressi.adriani@jasamarga.co.id ABSTRAK Data kepadatan lalu-lintas merupakan kebutuhan
PEMANFAATAN KAMERA CCTV SEBAGAI ALAT BANTU TRAFFIC SURVEY BIDANG : TRAFFIC ENGINEERING Ressi Dyah Adriani NPP 10529 ressi.adriani@jasamarga.co.id ABSTRAK Data kepadatan lalu-lintas merupakan kebutuhan
KETENTUAN HUKUM DALAM PENGGUNAAN DRONE DI INDONESIA
 KETENTUAN HUKUM DALAM PENGGUNAAN DRONE DI INDONESIA Drone, pesawat udara mini tanpa awak yang dikendalikan dengan remote control dan frekuensi radio, semakin diminati para pecinta teknologi di seluruh
KETENTUAN HUKUM DALAM PENGGUNAAN DRONE DI INDONESIA Drone, pesawat udara mini tanpa awak yang dikendalikan dengan remote control dan frekuensi radio, semakin diminati para pecinta teknologi di seluruh