PT.LINTAS ANANTARA NUSA DRONE MULTI PURPOSES.
|
|
|
- Yanti Sasmita
- 6 tahun lalu
- Tontonan:
Transkripsi

1 DRONE MULTI PURPOSES

2 Multirotor merupakan salah satu jenis wahana terbang tanpa awak yang memiliki rotor lebih dari satu. Wahana ini memiliki kemampuan take-off dan landing secara vertical. Dibandingkan dengan helikopter, multirotor memiliki bentuk dan mekanisme yang lebih sederhana. Dalam pengoperasiannya mutirotor juga lebih stabil dan mudah dikontrol, sehingga dapat cepat digunakan kepada orang yang baru belajar menerbangkan wahana terbang. Selain itu dengan teknologi sekarang yang lebih canggih multirotor dapat bergerak otomatis sesuai perintah berdasarkan koordinat GPS. Dengan keunggulan ini multirotor kini telah menjadi sebuah alat yang sangat berguna untuk berbagai aplikasi seperti monitoring dari udara,survey,ekspedisi, dan pemetaan. Dalam satu kali misi penerbangan, multirotor biasanya hanya memiliki waktu yang relatif singkat, berkisar menit. Ini terjadinya umumnya pada kit-kit multirotor yang tersedia di pasaran. Selain itu kemampuan mengangkat payload hanya sedikit dan sulit untuk dilakukan penambahan baik dari segi ukuran dan berat. Masalah lainnya juga sering terjadi seperti jangkauan radio kontrol yang pendek. Oleh karena itu dengan multirotor hasil rakitan sendiri diharapkan dapat menyelesaikan masalahmasalah tersebut. Melalui multirotor yang dibuat sendiri dapat dilakukan perancangan sesuai spesifikasi yang dibutuhkan. Multirotor dapat dirancang dengan frame/body sederhana sehingga jika terjadi kerusakan mudah dalam perbaikan atau penggantian komponen. Selain itu dapat dirancang untuk terbang lebih lama ataumemiliki kemampuan mengangkat payload yang lebih besar. Selain itu juga mudah dalam penambahan fitur seperti pemasangan gimbal dan kamera, atau alat lainnya. Dengan spesifikasi yang dibuat sesuai kebutuhan maka biaya pembuatan multirotor dapat ditekan dan menjadi lebih murah.
3 KEGUNAAN Pemetaan udara merupakan salah satu produk dari ilmu geografi yang bertujuan untuk mengambil gambar obyek, daerah atau fenomena yang ada di permukaan bumi menggunakan kamera yang terdapat di Multirotor. Pemetaan udara dapat dilakukan dengan cara memotret menggunakan wahana berupa balon udara, gantole, pesawat udara atau Multirotor. Kelebihan dari Multirotor dapat terbang dengan stabil dan dapat diam diposisi yang diinginkan sehingga dapan mengambil foto sesuai dengan keinginan. SPESIFIKASI Jumlah Baling-baling : 6 buah Kecepatan maksimal, horizontal : 20 m/s; vertikal : 3 m/s Ketahanan terhadap angin : hingga 8 m/s Durasi terbang maksimal: 30 menit (tergantung payload), 25 menit (dengan kamera dan gimbal) Payload maksimal : 500 g Ketinggian maksimum hingga 1 km Remote control kemampuan jangkauan maksimal 9 km Sistem autopilot dilengkapi dengan waypoint dan auto-landing Real-time flight data monitoring dengan jangkauan 7 km Ground Station dapat menggunakan ipad atau PC/Laptop KOMPONEN MULTIROTOR Komponen Utama Multirotor Multirotor Airframe Flight Control Unit GPS Module Motor Brushless DC Electronics Speed Controller (ESC) Propeller Baterai


4 Sistem Gimbal dan Kamera Gimbal Kamera untuk Pemetaan Control Station Datalink Telemetry Tripod Antenna Remote Control Contoh Hasil Perakitan


5 MULTIROTOR UNTUK PEMETAAN Efektif area mapping 120 Ha dalam satu kali penerbangan dengan tinggi terbang 150m. (perencanaan jalur terbang pemetaan)

. Spesifikasi minimum yang diperlukan untuk pemrosesan adalah dengan proses Intel i3 ke atas dengan RAM minimal 4GB.")
6 Dengan estimasi lama terbang untuk satu kali misi pemetaan adalah 18 menit. Waktu ini sudah termasuk multirotor take off menuju titik misi waypoint dan landing ke home. Untuk pemrosesan digunakan software Agisoft PhotoScan. Lama waktu yang dibutuhkan untuk pemrosesan untuk area 120Ha dengan estimasi 200 foto yang terambil memerlukan waktu 2-3 jam (tergantung spesifikasi komputer). Spesifikasi minimum yang diperlukan untuk pemrosesan adalah dengan proses Intel i3 ke atas dengan RAM minimal 4GB. Sangat dianjurkan menggunakan graphic card karena dapat mempercepat proses pengolahan foto menjadi peta digital.

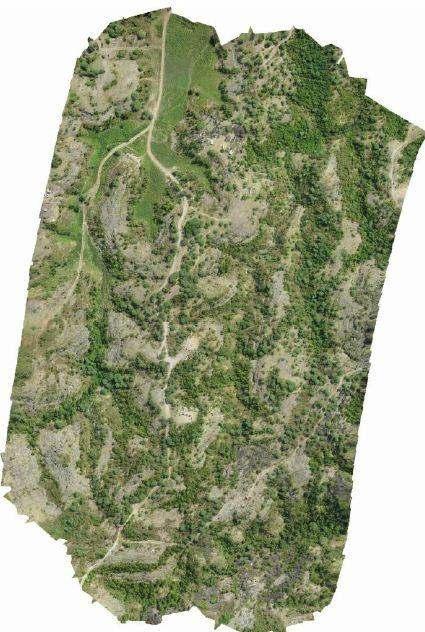
7 HASIL GAMBAR PEMETAAN
8 For further information & inquiries: Best Regard, ARY.HAMZAH PT.Lintas Anantara Nusa E: P: /
APLIKASI DRONE UAV & MULTIROTOR UNTUK PERKEBUNAN KELAPA SAWIT. Disusun Oleh: Agus Widanarko
 APLIKASI DRONE UAV & MULTIROTOR UNTUK PERKEBUNAN KELAPA SAWIT Disusun Oleh: Agus Widanarko FEBRUARI 2015 APLIKASI DRONE DI PERKEBUNAN 1. Survei Lapangan Untuk mengetahui kondisi areal dari udara terutama
APLIKASI DRONE UAV & MULTIROTOR UNTUK PERKEBUNAN KELAPA SAWIT Disusun Oleh: Agus Widanarko FEBRUARI 2015 APLIKASI DRONE DI PERKEBUNAN 1. Survei Lapangan Untuk mengetahui kondisi areal dari udara terutama
BAB I PENDAHULUAN 1.1 Latar Belakang
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Ilmu pengetahuan dan teknologi dalam bidang robotika pada saat ini berkembang dengan sangat cepat. Teknologi robotika pada dasarnya dikembangkan dengan tujuan untuk
1 BAB I PENDAHULUAN 1.1 Latar Belakang Ilmu pengetahuan dan teknologi dalam bidang robotika pada saat ini berkembang dengan sangat cepat. Teknologi robotika pada dasarnya dikembangkan dengan tujuan untuk
KATA PENGANTAR. Cikeas, Januari Penulis
 i KATA PENGANTAR Puji syukur kehadirat Tuhan Yang Maha Esa atas segala rahmat-nya sehingga Buku Panduan UAV ini dapat tersusun hingga selesai. Tidak lupa kami juga mengucapkan terimakasih kepada seluruh
i KATA PENGANTAR Puji syukur kehadirat Tuhan Yang Maha Esa atas segala rahmat-nya sehingga Buku Panduan UAV ini dapat tersusun hingga selesai. Tidak lupa kami juga mengucapkan terimakasih kepada seluruh
III. METODE PENELITIAN. Penelitian dan perancangan tugas akhir dilaksanakan mulai Agustus 2015
 III. METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian dan perancangan tugas akhir dilaksanakan mulai Agustus 2015 sampai Desember 2015 (jadwal dan aktifitas penelitian terlampir), bertempat di Laboratorium
III. METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian dan perancangan tugas akhir dilaksanakan mulai Agustus 2015 sampai Desember 2015 (jadwal dan aktifitas penelitian terlampir), bertempat di Laboratorium
BAB III METODE PENELITIAN
 3.1 Lokasi Penelitian BAB III METODE PENELITIAN Lokasi penelitian bertempat di kawasan sebagian kawasan PLTA Garung lebih tepatnya mencakup dua Desa yaitu : Desa Tlogo dan Desa Kejajar, Kecamatan garung,
3.1 Lokasi Penelitian BAB III METODE PENELITIAN Lokasi penelitian bertempat di kawasan sebagian kawasan PLTA Garung lebih tepatnya mencakup dua Desa yaitu : Desa Tlogo dan Desa Kejajar, Kecamatan garung,
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang UAV (Unmanned Aerial Vehicle) atau biasa disebut pesawat tanpa awak saat ini sedang mengalami perkembangan yang sangat pesat di dunia. Penggunaan UAV dikategorikan
BAB 1 PENDAHULUAN 1.1 Latar Belakang UAV (Unmanned Aerial Vehicle) atau biasa disebut pesawat tanpa awak saat ini sedang mengalami perkembangan yang sangat pesat di dunia. Penggunaan UAV dikategorikan
I. PENDAHULUAN. Wahana udara tanpa awak (WUT) merupakan alternatif dari pesawat berawak
 merupakan alternatif dari pesawat berawak") I. PENDAHULUAN 1.1. Latar Belakang Wahana udara tanpa awak (WUT) merupakan alternatif dari pesawat berawak untuk banyak keperluan penerbangan baik dibidang militer maupun sipil. Dibandingkan dengan wahana
I. PENDAHULUAN 1.1. Latar Belakang Wahana udara tanpa awak (WUT) merupakan alternatif dari pesawat berawak untuk banyak keperluan penerbangan baik dibidang militer maupun sipil. Dibandingkan dengan wahana
PLATFORM UNMANNED AERIAL VEHICLE UNTUK AERIAL PHOTOGRAPHY AEROMODELLING AND PAYLOAD TELEMETRY RESEARCH GROUP (APTRG)
") PLATFORM UNMANNED AERIAL VEHICLE UNTUK AERIAL PHOTOGRAPHY AEROMODELLING AND PAYLOAD TELEMETRY RESEARCH GROUP (APTRG) Nurmajid Setyasaputra *), Fajar Septian **), Riyadhi Fernanda **), Suharmin Bahri **),
PLATFORM UNMANNED AERIAL VEHICLE UNTUK AERIAL PHOTOGRAPHY AEROMODELLING AND PAYLOAD TELEMETRY RESEARCH GROUP (APTRG) Nurmajid Setyasaputra *), Fajar Septian **), Riyadhi Fernanda **), Suharmin Bahri **),
2 TINJAUAN PUSTAKA. Unmanned Surface Vehicle (USV) atau Autonomous Surface Vehicle (ASV)
 atau Autonomous Surface Vehicle (ASV)") 2 TINJAUAN PUSTAKA 2.1 Unmanned Surface Vehicle (USV) Unmanned Surface Vehicle (USV) atau Autonomous Surface Vehicle (ASV) merupakan sebuah wahana tanpa awak yang dapat dioperasikan pada permukaan air.
2 TINJAUAN PUSTAKA 2.1 Unmanned Surface Vehicle (USV) Unmanned Surface Vehicle (USV) atau Autonomous Surface Vehicle (ASV) merupakan sebuah wahana tanpa awak yang dapat dioperasikan pada permukaan air.
BAB IV ANALISA DAN PENGUJIAN ALAT
 BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Uji coba dan Analisa Tujuan dari pengujian tugas akhir ini adalah untuk mengetahui sampai sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebab
BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Uji coba dan Analisa Tujuan dari pengujian tugas akhir ini adalah untuk mengetahui sampai sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebab
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Umumnya pesawat diklasifikasikan menjadi dua kategori yaitu sayap tetap (fix wing) dan sayap putar (rotary wing). Pada sayap putar pesawat tersebut dirancang
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Umumnya pesawat diklasifikasikan menjadi dua kategori yaitu sayap tetap (fix wing) dan sayap putar (rotary wing). Pada sayap putar pesawat tersebut dirancang
PERENCANAAN JALUR TERBANG TANPA PILOT PADA PROSES PENGUMPULAN DATA UNTUK PEMETAAN DENGAN PENERBANGAN TANPA AWAK
 ISSN 1858-4667 JURNAL LINK VOL. 27/No. 1/Februari 2018 PERENCANAAN JALUR TERBANG TANPA PILOT PADA PROSES PENGUMPULAN DATA UNTUK PEMETAAN DENGAN PENERBANGAN TANPA AWAK Maulana Rizqi Fakultas Ilmu Komputer
ISSN 1858-4667 JURNAL LINK VOL. 27/No. 1/Februari 2018 PERENCANAAN JALUR TERBANG TANPA PILOT PADA PROSES PENGUMPULAN DATA UNTUK PEMETAAN DENGAN PENERBANGAN TANPA AWAK Maulana Rizqi Fakultas Ilmu Komputer
BAB III IMPLEMENTASI ALAT
 BAB III IMPLEMENTASI ALAT Hal-hal yang perlu dipersiapkan yaitu pengetahuan mengenai sistem yang direncanakan dan peralatan pendukung sistem yang akan digunakan. Perancangan sistem meliputi perancangan
BAB III IMPLEMENTASI ALAT Hal-hal yang perlu dipersiapkan yaitu pengetahuan mengenai sistem yang direncanakan dan peralatan pendukung sistem yang akan digunakan. Perancangan sistem meliputi perancangan
I. PENDAHULUAN. Akhmad (2000) diartikan sebagai adanya bahan-bahan atau zat zat asing
 diartikan sebagai adanya bahan-bahan atau zat zat asing") I. PENDAHULUAN 1.1 Latar Belakang Masalah Pencemaran udara atau sering disebut dengan istilah polusi udara menurut Akhmad (2000) diartikan sebagai adanya bahan-bahan atau zat zat asing didalam udara yang
I. PENDAHULUAN 1.1 Latar Belakang Masalah Pencemaran udara atau sering disebut dengan istilah polusi udara menurut Akhmad (2000) diartikan sebagai adanya bahan-bahan atau zat zat asing didalam udara yang
BAB I PENDAHULUAN 1.1 Latar Belakang
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi pesawat tanpa awak (english : Unmanned Aerial Vehicle disingkat UAV) sangat pesat. Diperkirakan UAV akan berkembang secara signifikan pada
1 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi pesawat tanpa awak (english : Unmanned Aerial Vehicle disingkat UAV) sangat pesat. Diperkirakan UAV akan berkembang secara signifikan pada
PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP 2 KRTI 2015
 PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP 2 KRTI 2015 Evaluasi tahap 2 KRTI 2015 ini meliputi Laporan Tertulis dan Video Terbang. 1. Ketentuan Laporan Tertulis Laporan tertulis diketik dengan font
PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP 2 KRTI 2015 Evaluasi tahap 2 KRTI 2015 ini meliputi Laporan Tertulis dan Video Terbang. 1. Ketentuan Laporan Tertulis Laporan tertulis diketik dengan font
SYAHIDAL WAHID
 PEMANFAATAN GPS TERHADAP KENDALI OTOMATIS PADA DRONE PEMANTAU KEADAAN LALU LINTAS LAPORAN AKHIR Disusun Sebagai Salah Satu Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro Program
PEMANFAATAN GPS TERHADAP KENDALI OTOMATIS PADA DRONE PEMANTAU KEADAAN LALU LINTAS LAPORAN AKHIR Disusun Sebagai Salah Satu Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro Program
Oghy Octori 1, Agung Budi Cahyono 1 1 Jurusan Teknik Geomatika FTSP Institut Teknologi Sepuluh Nopember
 FOTO UDARA MENGGUNAKAN WAHANA UAV JENIS FIX WING AERIAL PHOTOGRAPHY USING FIXED WING UAV Oghy Octori 1, Agung Budi Cahyono 1 1 Jurusan Teknik Geomatika FTSP Institut Teknologi Sepuluh Nopember Email: oghyoctori92@gmail.com
FOTO UDARA MENGGUNAKAN WAHANA UAV JENIS FIX WING AERIAL PHOTOGRAPHY USING FIXED WING UAV Oghy Octori 1, Agung Budi Cahyono 1 1 Jurusan Teknik Geomatika FTSP Institut Teknologi Sepuluh Nopember Email: oghyoctori92@gmail.com
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat udara tanpa awak atau Unmanned Aerial Vehicle (UAV) adalah sebuah pesawat terbang yang dapat dikendalikan secara jarak jauh oleh pilot atau dengan mengendalikan
BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat udara tanpa awak atau Unmanned Aerial Vehicle (UAV) adalah sebuah pesawat terbang yang dapat dikendalikan secara jarak jauh oleh pilot atau dengan mengendalikan
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Unmanned aerial vehicles (UAVs) atau wahana tanpa awak merupakan wahana terbang tanpa ada yang mengendalikan penerbangan wahana tersebut. Sebuah UAV dapat berupa pesawat
BAB 1 PENDAHULUAN 1.1 Latar Belakang Unmanned aerial vehicles (UAVs) atau wahana tanpa awak merupakan wahana terbang tanpa ada yang mengendalikan penerbangan wahana tersebut. Sebuah UAV dapat berupa pesawat
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Pesawat tanpa awak atau sering disebut drone merupakan teknologi baru yang saat ini sedang berkembang pesat di dunia. Pesawat tanpa awak ini banyak dikembangkan dalam
BAB 1 PENDAHULUAN 1.1 Latar Belakang Pesawat tanpa awak atau sering disebut drone merupakan teknologi baru yang saat ini sedang berkembang pesat di dunia. Pesawat tanpa awak ini banyak dikembangkan dalam
IV. HASIL DAN PEMBAHASAN. Penempatan perangkat elektonik autopilot pada wahana Proto-03 dapat dilihat
 IV. HASIL DAN PEMBAHASAN 4.1 Hasil 4.1.1 Hasil Instalasi Hardware Penempatan perangkat elektonik autopilot pada wahana Proto-03 dapat dilihat pada gambar 4.1. berikut ini. Gambar 1.1. Tata letak perangkat
IV. HASIL DAN PEMBAHASAN 4.1 Hasil 4.1.1 Hasil Instalasi Hardware Penempatan perangkat elektonik autopilot pada wahana Proto-03 dapat dilihat pada gambar 4.1. berikut ini. Gambar 1.1. Tata letak perangkat
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN BAB 1 1.1 Latar Belakang Pemetaan merupakan suatu kegiatan pengukuran, penghitungan dan penggambaran permukaan bumi di atas bidang datar dengan menggunakan metode pemetaan tertentu sehingga
BAB I PENDAHULUAN BAB 1 1.1 Latar Belakang Pemetaan merupakan suatu kegiatan pengukuran, penghitungan dan penggambaran permukaan bumi di atas bidang datar dengan menggunakan metode pemetaan tertentu sehingga
BAB I PENDAHULUAN 1.1 Latar Belakang
 2 BAB I PENDAHULUAN 1.1 Latar Belakang Saat ini teknologi di bidang penerbangan sudah sangat maju. Pesawat terbang sudah dapat dikendalikan secara jarak jauh sehingga memungkinkan adanya suatu pesawat
2 BAB I PENDAHULUAN 1.1 Latar Belakang Saat ini teknologi di bidang penerbangan sudah sangat maju. Pesawat terbang sudah dapat dikendalikan secara jarak jauh sehingga memungkinkan adanya suatu pesawat
I. PENDAHULUAN. UAV (Unnmaned Aerial Vehicle) secara umum dapat diartikan sebuah wahana udara
 secara umum dapat diartikan sebuah wahana udara") I. PENDAHULUAN A. Latar Belakang UAV (Unnmaned Aerial Vehicle) secara umum dapat diartikan sebuah wahana udara jenis fixed-wing, rotary-wing, ataupun pesawat yang mampu mengudara pada jalur yang ditentukan
I. PENDAHULUAN A. Latar Belakang UAV (Unnmaned Aerial Vehicle) secara umum dapat diartikan sebuah wahana udara jenis fixed-wing, rotary-wing, ataupun pesawat yang mampu mengudara pada jalur yang ditentukan
BAB I PENDAHULUAN. I.1 Latar Belakang
 BAB I PENDAHULUAN I.1 Latar Belakang PT Perkebunan Nusantara VIII (Persero), disingkat PTPN VIII merupakan perusahaan yang bergerak dibidang perkebunan. Perusahaan ini mengelolah perkebunan yang berada
BAB I PENDAHULUAN I.1 Latar Belakang PT Perkebunan Nusantara VIII (Persero), disingkat PTPN VIII merupakan perusahaan yang bergerak dibidang perkebunan. Perusahaan ini mengelolah perkebunan yang berada
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi UAV (Unmanned Aerial Vehicle) atau UAS (Unmanned Aircraft System) merupakan salah satu teknologi kedirgantaraan yang saat ini sedang berkembang dengan pesat.
BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi UAV (Unmanned Aerial Vehicle) atau UAS (Unmanned Aircraft System) merupakan salah satu teknologi kedirgantaraan yang saat ini sedang berkembang dengan pesat.
BAB I PENDAHULUAN 1.1 LATAR BELAKANG
 BAB I PENDAHULUAN 1.1 LATAR BELAKANG Seiring dengan berkembangnya permintaan akan pemetaan suatu wilayah dalam berbagai bidang, maka semakin berkembang pula berbagai macam metode pemetaan. Dengan memanfaatkan
BAB I PENDAHULUAN 1.1 LATAR BELAKANG Seiring dengan berkembangnya permintaan akan pemetaan suatu wilayah dalam berbagai bidang, maka semakin berkembang pula berbagai macam metode pemetaan. Dengan memanfaatkan
Volume F3U-INA Radio Control Drone Racing Edisi 2017
 FEDERASI AERO SPORT INDONESIA PORDIRGA AEROMODELLING Volume F3U-INA Radio Control Drone Racing Edisi 2017 Efektif November 2017 F3U (FAI Provisional Class) - RC Multi-rotor FPV Racing Ref. SC4_Vol_F3_FPVRacing_15-3-17
FEDERASI AERO SPORT INDONESIA PORDIRGA AEROMODELLING Volume F3U-INA Radio Control Drone Racing Edisi 2017 Efektif November 2017 F3U (FAI Provisional Class) - RC Multi-rotor FPV Racing Ref. SC4_Vol_F3_FPVRacing_15-3-17
3.3.2 Perencanaan Jalur Terbang Perencanaan Pemotretan Condong Perencanaan Penerbangan Tahap Akuisisi Data...
 DAFTAR ISI 1. BAB I. PENDAHULUAN... 1 1.1 Latar Belakang... 1 1.2 Rumusan Masalah... 3 1.3 Pertanyaan Penelitian... 4 1.4 Tujuan Penelitian... 4 1.5 Manfaat Penelitian... 4 2. BAB II. TINJAUAN PUSTAKA...
DAFTAR ISI 1. BAB I. PENDAHULUAN... 1 1.1 Latar Belakang... 1 1.2 Rumusan Masalah... 3 1.3 Pertanyaan Penelitian... 4 1.4 Tujuan Penelitian... 4 1.5 Manfaat Penelitian... 4 2. BAB II. TINJAUAN PUSTAKA...
AEROMODELLING COMPETITION HANDBOOK MECHANICAL & MARINE NATIONAL EXPOSITION 2016
 AEROMODELLING COMPETITION HANDBOOK MECHANICAL & MARINE NATIONAL EXPOSITION 2016 1. Ketentuan Umum Lomba Aeromodelling ini merupakan perlombaan model pesawat (fixed wing) yang dikontrol secara manual menggunakan
AEROMODELLING COMPETITION HANDBOOK MECHANICAL & MARINE NATIONAL EXPOSITION 2016 1. Ketentuan Umum Lomba Aeromodelling ini merupakan perlombaan model pesawat (fixed wing) yang dikontrol secara manual menggunakan
III. METODE PENELITIAN. Perancangan sistem dilakukan dari bulan Juli sampai Desember 2012, bertempat di
 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Perancangan sistem dilakukan dari bulan Juli sampai Desember 2012, bertempat di Laboratorium Terpadu Teknik Elektro, Jurusan Teknik Elektro, Universitas
III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Perancangan sistem dilakukan dari bulan Juli sampai Desember 2012, bertempat di Laboratorium Terpadu Teknik Elektro, Jurusan Teknik Elektro, Universitas
SISTEM KENDALI POSISI DAN KETINGGIAN TERBANG PESAWAT QUADCOPTER A S R U L P
 SISTEM KENDALI POSISI DAN KETINGGIAN TERBANG PESAWAT QUADCOPTER A S R U L P2700213428 PROGRAM PASCASARJANA PROGRAM STUDI TEKNIK ELEKTRO UNIVERSITAS HASANUDDIN MAKASSAR 2014 ii DRAFT PROPOSAL JUDUL Sistem
SISTEM KENDALI POSISI DAN KETINGGIAN TERBANG PESAWAT QUADCOPTER A S R U L P2700213428 PROGRAM PASCASARJANA PROGRAM STUDI TEKNIK ELEKTRO UNIVERSITAS HASANUDDIN MAKASSAR 2014 ii DRAFT PROPOSAL JUDUL Sistem
I. PENDAHULUAN. misalnya teknologi elektronik dengan keluarnya smartphone ataupun gadget
 I. PENDAHULUAN 1.1 Latar Belakang Masalah Globalisasi, merupakan sebuah era dimana perkembangan taraf hidup manusia mengalami perkembangan yang semakin hari semakin pesat. Hal ini ditandai dengan semakin
I. PENDAHULUAN 1.1 Latar Belakang Masalah Globalisasi, merupakan sebuah era dimana perkembangan taraf hidup manusia mengalami perkembangan yang semakin hari semakin pesat. Hal ini ditandai dengan semakin
BAB I PENDAHULUAN. 1.1 Latar Belakang
 1.1 Latar Belakang BAB I PENDAHULUAN UAV yang merupakan kepanjangan dari Unmanned Aerial Vehicles, atau dalam kata lain DRONE adalah tipe pesawat terbang yang beroperasi dengan sendirinya tanpa seorang
1.1 Latar Belakang BAB I PENDAHULUAN UAV yang merupakan kepanjangan dari Unmanned Aerial Vehicles, atau dalam kata lain DRONE adalah tipe pesawat terbang yang beroperasi dengan sendirinya tanpa seorang
(LAPAN) LEMBAGA PENERBANGAN DAN ANTARIKSA NASIONAL
 LEMBAGA PENERBANGAN DAN ANTARIKSA NASIONAL") (LAPAN) LEMBAGA PENERBANGAN DAN ANTARIKSA NASIONAL ORGANISASI LAPAN PUSAT TEKNOLOGI PENERBANGAN 2011 - SEKARANG PUSAT TEKNOLOGI PENERBANGAN Lab. Avionik Lab. Propulsi Gedung Utama Lab. Aerostruktur Lab.
(LAPAN) LEMBAGA PENERBANGAN DAN ANTARIKSA NASIONAL ORGANISASI LAPAN PUSAT TEKNOLOGI PENERBANGAN 2011 - SEKARANG PUSAT TEKNOLOGI PENERBANGAN Lab. Avionik Lab. Propulsi Gedung Utama Lab. Aerostruktur Lab.
BAB I PENDAHULUAN Tujuan. Merancang dan merealisasikan pesawat terbang mandiri tanpa awak dengan empat. baling-baling penggerak.
 BAB I PENDAHULUAN 1.1. Tujuan Merancang dan merealisasikan pesawat terbang mandiri tanpa awak dengan empat baling-baling penggerak. 1.2. Latar Belakang Pesawat terbang tanpa awak atau UAV (Unmanned Aerial
BAB I PENDAHULUAN 1.1. Tujuan Merancang dan merealisasikan pesawat terbang mandiri tanpa awak dengan empat baling-baling penggerak. 1.2. Latar Belakang Pesawat terbang tanpa awak atau UAV (Unmanned Aerial
3 METODE PENELITIAN. c. Perangkat lunak Mission Planner. f. First Person View (FPV) Camera BOSCAMM
 Camera BOSCAMM") 3 METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian dan perancangan tugas akhir dilaksanakan mulai Januari 2015 sampai Juni 2015, bertempat di Laboratorium Teknik Elektronika, Laboratorium Terpadu Teknik
3 METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian dan perancangan tugas akhir dilaksanakan mulai Januari 2015 sampai Juni 2015, bertempat di Laboratorium Teknik Elektronika, Laboratorium Terpadu Teknik
PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP II KRTI 2017
 PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP II KRTI 2017 Evaluasi tahap II KRTI 2017 ini meliputi Laporan Tertulis dan Video Terbang. 1. Ketentuan Laporan Tertulis 1. Laporan tertulis diketik dengan
PANDUAN PENYUSUNAN LAPORAN UNTUK EVALUASI TAHAP II KRTI 2017 Evaluasi tahap II KRTI 2017 ini meliputi Laporan Tertulis dan Video Terbang. 1. Ketentuan Laporan Tertulis 1. Laporan tertulis diketik dengan
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1. Latar Belakang Masalah UAV (Unmanned Aerial Vehicle) adalah sebuah sistem pesawat udara yang tidak memiliki awak yang berada di dalam pesawat (onboard). Keberadaan awak pesawat digantikan
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah UAV (Unmanned Aerial Vehicle) adalah sebuah sistem pesawat udara yang tidak memiliki awak yang berada di dalam pesawat (onboard). Keberadaan awak pesawat digantikan
KARAKTERISTIK SISTEM WAHANA UDARA NIR-AWAK
 KARAKTERISTIK SISTEM WAHANA UDARA NIR-AWAK Sistem berbentuk modular yang memusahkan replacement apabila terjadi kerusakan Parachute Landing Tipe Airborne Platform Spesifikasi Teknis : - Type High-Wing
KARAKTERISTIK SISTEM WAHANA UDARA NIR-AWAK Sistem berbentuk modular yang memusahkan replacement apabila terjadi kerusakan Parachute Landing Tipe Airborne Platform Spesifikasi Teknis : - Type High-Wing
Langkah-langkah Photo dan Shoot Video Dengan Drone DJI Phantom 3 atau 4
 Langkah-langkah Photo dan Shoot Video Dengan Drone DJI Phantom 3 atau 4 PHOTOGRAPHY dan VIDEOGRAPHY Dengan DRONE PHOTOGRAPHY dan VIDEOGRAPHY dengan Drone Penggunaan drone dalam aerial photography kini
Langkah-langkah Photo dan Shoot Video Dengan Drone DJI Phantom 3 atau 4 PHOTOGRAPHY dan VIDEOGRAPHY Dengan DRONE PHOTOGRAPHY dan VIDEOGRAPHY dengan Drone Penggunaan drone dalam aerial photography kini
MECHANICAL AND MARINE ENGINEERING NATIONAL EXPOSITION 2017 AEROMODELLING COMPETITION HANDBOOK
 Page 1 of 10 MECHANICAL AND MARINE ENGINEERING NATIONAL EXPOSITION 2017 1. Ketentuan Umum AEROMODELLING COMPETITION HANDBOOK Lomba Aeromodelling ini merupakan Perlombaan Model Pesawat (Fixed Wing) indoor
Page 1 of 10 MECHANICAL AND MARINE ENGINEERING NATIONAL EXPOSITION 2017 1. Ketentuan Umum AEROMODELLING COMPETITION HANDBOOK Lomba Aeromodelling ini merupakan Perlombaan Model Pesawat (Fixed Wing) indoor
BAB I PENDAHULUAN 1.1. Latar Belakang
 BAB I PENDAHULUAN 1.1. Latar Belakang Seiring perkembangan teknologi telekomunikasi dan dirgantara dapat menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokal tertentu dengan
BAB I PENDAHULUAN 1.1. Latar Belakang Seiring perkembangan teknologi telekomunikasi dan dirgantara dapat menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokal tertentu dengan
TEKNOLOGI RIMS (RAPID IMAGING AND MAPPING SYSTEMS)
") TEKNOLOGI RIMS (RAPID IMAGING AND MAPPING SYSTEMS) MEMILIKI KEUNGGULAN: 1. LEBIH DETAIL, TAJAM, JELAS 2. PRODUKSI SKALA BESAR (1/1000) 3. BEBAS AWAN 4. MELAYANI LUAS AREA 5Ha 5000Ha 5. PROSES LEBIH CEPAT
TEKNOLOGI RIMS (RAPID IMAGING AND MAPPING SYSTEMS) MEMILIKI KEUNGGULAN: 1. LEBIH DETAIL, TAJAM, JELAS 2. PRODUKSI SKALA BESAR (1/1000) 3. BEBAS AWAN 4. MELAYANI LUAS AREA 5Ha 5000Ha 5. PROSES LEBIH CEPAT
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Sebuah Unmanned Aerial Vehicle (UAV) merupakan pesawat tanpa awak yang dikendalikan dari jarak jauh atau diterbangkan secara mandiri yang dilakukan pemrograman terlebih
BAB I PENDAHULUAN 1.1 Latar Belakang Sebuah Unmanned Aerial Vehicle (UAV) merupakan pesawat tanpa awak yang dikendalikan dari jarak jauh atau diterbangkan secara mandiri yang dilakukan pemrograman terlebih
BAB I PENDAHULUAN. 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Dalam melakukan pengambilan gambar di udara, banyak media yang bisa digunakan dan dengan semakin berkembangnya teknologi saat ini terutama dalam ilmu pengetahuan, membuat
BAB I PENDAHULUAN 1.1 Latar Belakang Dalam melakukan pengambilan gambar di udara, banyak media yang bisa digunakan dan dengan semakin berkembangnya teknologi saat ini terutama dalam ilmu pengetahuan, membuat
Calyptra : Jurnal Ilmiah Mahasiswa Universitas Surabaya Vol.4 No.2 (2015)
") Estimasi Parameter Model Height-Roll-Pitch-Yaw AR Drone dengan Least Square Method Steven Tanto Teknik Elektro / Fakultas Teknik steventanto@gmail.com Agung Prayitno Teknik Elektro / Fakultas Teknik prayitno_agung@staff.ubaya.ac.id
Estimasi Parameter Model Height-Roll-Pitch-Yaw AR Drone dengan Least Square Method Steven Tanto Teknik Elektro / Fakultas Teknik steventanto@gmail.com Agung Prayitno Teknik Elektro / Fakultas Teknik prayitno_agung@staff.ubaya.ac.id
BAB I PENDAHULUAN 1.1 Latar Belakang Parrot AR. Drone
 BAB I PENDAHULUAN 1.1 Latar Belakang Quadrotor merupakan salah satu jenis Unmanned Aerial Vehicle (UAV) atau pesawat tanpa awak yang memiliki empat buah baling-baling (rotor) yang biasa juga disebut quadcopter.
BAB I PENDAHULUAN 1.1 Latar Belakang Quadrotor merupakan salah satu jenis Unmanned Aerial Vehicle (UAV) atau pesawat tanpa awak yang memiliki empat buah baling-baling (rotor) yang biasa juga disebut quadcopter.
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah (Austin, 2010).
.") BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Saat ini, beberapa negara maju sedang mencoba untuk mengembangkan teknologi pesawat tanpa awak atau sering disebut dengan Unmanned Aerial Vehicle (UAV). UAV
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Saat ini, beberapa negara maju sedang mencoba untuk mengembangkan teknologi pesawat tanpa awak atau sering disebut dengan Unmanned Aerial Vehicle (UAV). UAV
BAB 1 PENDAHULUAN. 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Perkembangan sistem ilmu pengetahuan dan teknologi semakin pesat di abad ke- 21 ini, khususnya dalam bidang penerbangan. Pada dekade terakhir dunia penerbangan mengalami
BAB 1 PENDAHULUAN 1.1 Latar Belakang Perkembangan sistem ilmu pengetahuan dan teknologi semakin pesat di abad ke- 21 ini, khususnya dalam bidang penerbangan. Pada dekade terakhir dunia penerbangan mengalami
Uji Terbang Autonomous Low Cost Fixed Wing UAV Menggunakan PID Compensator
 Available online at Website http://ejournal.undip.ac.id/index.php/rotasi Uji Terbang Autonomous Low Cost Fixed Wing UAV Menggunakan PID Compensator *Mochammad Ariyanto, Joga D. Setiawan, Munadi, Teguh
Available online at Website http://ejournal.undip.ac.id/index.php/rotasi Uji Terbang Autonomous Low Cost Fixed Wing UAV Menggunakan PID Compensator *Mochammad Ariyanto, Joga D. Setiawan, Munadi, Teguh
1 PENDAHULUAN. minum, sarana olahraga, sebagai jalur trasportasi, dan sebagai tempat PLTA
 1 PENDAHULUAN 1.1 Latar Belakang Daerah perairan, khususnya sungai, memiliki peranan penting untuk kehidupan manusia. Manfaat sungai antara lain untuk irigasi, bahan baku air minum, sarana olahraga, sebagai
1 PENDAHULUAN 1.1 Latar Belakang Daerah perairan, khususnya sungai, memiliki peranan penting untuk kehidupan manusia. Manfaat sungai antara lain untuk irigasi, bahan baku air minum, sarana olahraga, sebagai
BAB 1 PENDAHULUAN. Dewasa ini perkembangan teknologi mengubah setiap sendi kehidupan manusia
 BAB 1 PENDAHULUAN 1.1. Latar Belakang Dewasa ini perkembangan teknologi mengubah setiap sendi kehidupan manusia dan lingkungannya. Banyak dari teknologi itu yang berakibat buruk, digunakan untuk perang
BAB 1 PENDAHULUAN 1.1. Latar Belakang Dewasa ini perkembangan teknologi mengubah setiap sendi kehidupan manusia dan lingkungannya. Banyak dari teknologi itu yang berakibat buruk, digunakan untuk perang
PERANCANGAN DAN PEMBUATAN RANGKA DRONE YANG EKONOMIS DAN PRAKTIS
 PERANCANGAN DAN PEMBUATAN RANGKA DRONE YANG EKONOMIS DAN PRAKTIS Syahril Sayuti 1*, Muhammad Soffan Hakim 2 1,2 Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Nasional Bandung Jalan
PERANCANGAN DAN PEMBUATAN RANGKA DRONE YANG EKONOMIS DAN PRAKTIS Syahril Sayuti 1*, Muhammad Soffan Hakim 2 1,2 Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Nasional Bandung Jalan
BAB I PENDAHULUAN. Gambar 1.1. UAV Shadow 200B (Thuvesson, Petersson, 2013)
") 1 BAB I PENDAHULUAN 1.1. Latar Belakang Teknologi dalam beberapa tahun belakangan ini berkembang sangat pesat. Salah satu lini yang turut mengalami efek perkembangan yang pesat ini adalah pada lini kedirgantaraan.
1 BAB I PENDAHULUAN 1.1. Latar Belakang Teknologi dalam beberapa tahun belakangan ini berkembang sangat pesat. Salah satu lini yang turut mengalami efek perkembangan yang pesat ini adalah pada lini kedirgantaraan.
Abstract. Keywords: Aerial Photo, EAGLE, Orienteering, UAV
 EAGLE : ENVIRONMENTAL GEOGRAPHERS UNMANNED AERIAL VEHICLE SEBAGAI INOVASI PEMANFAATAN PESAWAT TANPA AWAK DAN PENGOLAHAN FOTO UDARA DIGITAL UNTUK PEMBUATAN PETA NAVIGASI PADA OLAHRAGA ORIENTEERING Ferdiyan
EAGLE : ENVIRONMENTAL GEOGRAPHERS UNMANNED AERIAL VEHICLE SEBAGAI INOVASI PEMANFAATAN PESAWAT TANPA AWAK DAN PENGOLAHAN FOTO UDARA DIGITAL UNTUK PEMBUATAN PETA NAVIGASI PADA OLAHRAGA ORIENTEERING Ferdiyan
Gambar 1.1 Skema kontrol helikopter (Sumber: Stepniewski dan Keys (1909: 36))
)") BAB I PENDAHULUAN 1.1 Latar Belakang Umunya pesawat diklasifikasikan menjadi dua kategori yaitu sayap tetap (fix wing) dan sayap putar (rotary wing). Pada sayap putar pesawat tersebut dirancang memiliki
BAB I PENDAHULUAN 1.1 Latar Belakang Umunya pesawat diklasifikasikan menjadi dua kategori yaitu sayap tetap (fix wing) dan sayap putar (rotary wing). Pada sayap putar pesawat tersebut dirancang memiliki
BAB I PENDAHULUAN 1.1. Latar Belakang Pesawat tanpa awak atau pesawat nirawak (Unmanned Aerial Vehicle atau disingkat UAV), adalah sebuah mesin
, adalah sebuah mesin") BAB I PENDAHULUAN 1.1. Latar Belakang Pesawat tanpa awak atau pesawat nirawak (Unmanned Aerial Vehicle atau disingkat UAV), adalah sebuah mesin terbang yang berfungsi dengan kendali jarak jauh oleh pilot
BAB I PENDAHULUAN 1.1. Latar Belakang Pesawat tanpa awak atau pesawat nirawak (Unmanned Aerial Vehicle atau disingkat UAV), adalah sebuah mesin terbang yang berfungsi dengan kendali jarak jauh oleh pilot
PERANCANGAN SISTEM TELE-NAVIGATION PADA PESAWAT TANPA AWAK (MICRO UAV)
") PERANCANGAN SISTEM TELE-NAVIGATION PADA PESAWAT TANPA AWAK (MICRO UAV) Agus Basukesti Sekolah Tinggi Teknologi Adisutjipto Email: Agus_basukesti@yahoo.com ABSTRAK Sistem navigasi pada pengoperasian pesawat
PERANCANGAN SISTEM TELE-NAVIGATION PADA PESAWAT TANPA AWAK (MICRO UAV) Agus Basukesti Sekolah Tinggi Teknologi Adisutjipto Email: Agus_basukesti@yahoo.com ABSTRAK Sistem navigasi pada pengoperasian pesawat
Pembuatan Model Quadcopter yang Dapat Mempertahankan Ketinggian Tertentu
 Jurnal Teknik Elektro, Vol. 9, No. 2, September 26, 49-55 ISSN 4-87X Pembuatan Model Quadcopter yang Dapat Mempertahankan Ketinggian Tertentu DOI:.9744/jte.9.2.49-55 Wili Kumara Juang, Lauw Lim Un Tung
Jurnal Teknik Elektro, Vol. 9, No. 2, September 26, 49-55 ISSN 4-87X Pembuatan Model Quadcopter yang Dapat Mempertahankan Ketinggian Tertentu DOI:.9744/jte.9.2.49-55 Wili Kumara Juang, Lauw Lim Un Tung
KENDALI QUADCOPTER MENGGUNAKAN REMOTE CONTROL DENGAN FREKUENSI RADIO 2,4 GHZ
 KENDALI QUADCOPTER MENGGUNAKAN REMOTE CONTROL DENGAN FREKUENSI RADIO 2,4 GHZ LAPORAN AKHIR Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro Program Studi Teknik
KENDALI QUADCOPTER MENGGUNAKAN REMOTE CONTROL DENGAN FREKUENSI RADIO 2,4 GHZ LAPORAN AKHIR Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro Program Studi Teknik
TUGAS AKHIR - TE
 TUGAS AKHIR - TE 091399 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID UNTUK PENGATURAN ARAH DAN PENGATURAN HEADING PADA FIXED-WING UAV (UNMANNED AERIAL VEHICLE) Hery Setyo Widodo NRP. 2208100176 Laboratorium
TUGAS AKHIR - TE 091399 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID UNTUK PENGATURAN ARAH DAN PENGATURAN HEADING PADA FIXED-WING UAV (UNMANNED AERIAL VEHICLE) Hery Setyo Widodo NRP. 2208100176 Laboratorium
Pemetaan Foto Udara Menggunakan Wahana Fix Wing UAV (Studi Kasus: Kampus ITS, Sukolilo)
") JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: 2337-3539 (2301-9271 Print) F-403 Pemetaan Foto Udara Menggunakan Wahana Fix Wing UAV (Studi Kasus: Kampus ITS, Sukolilo) Ahmad Solihuddin Al Ayyubi, Agung
JURNAL TEKNIK ITS Vol. 6, No. 2, (2017) ISSN: 2337-3539 (2301-9271 Print) F-403 Pemetaan Foto Udara Menggunakan Wahana Fix Wing UAV (Studi Kasus: Kampus ITS, Sukolilo) Ahmad Solihuddin Al Ayyubi, Agung
BAB I PENDAHULUAN 1.1. Latar Belakang
 BAB I PENDAHULUAN 1.1. Latar Belakang Penelitian ini merupakan penelitian di bidang pemrosesan citra. Bidang pemrosesan citra sendiri terdapat tiga tingkatan yaitu operasi pemrosesan citra tingkat rendah,
BAB I PENDAHULUAN 1.1. Latar Belakang Penelitian ini merupakan penelitian di bidang pemrosesan citra. Bidang pemrosesan citra sendiri terdapat tiga tingkatan yaitu operasi pemrosesan citra tingkat rendah,
BAB 1 PENDAHULUAN. 1.1 Latar belakang
 BAB 1 PENDAHULUAN 1.1 Latar belakang Peta adalah sebuah media untuk menampilkan atau merepresentasikan sebuah tempat diatas permukaan bumi ke bidang datar. Peta yang disajikan selama ini masih berupa peta
BAB 1 PENDAHULUAN 1.1 Latar belakang Peta adalah sebuah media untuk menampilkan atau merepresentasikan sebuah tempat diatas permukaan bumi ke bidang datar. Peta yang disajikan selama ini masih berupa peta
APLIKASI FOTO UDARA UNTUK MEMPREDIKSI POTENSI SAWAH KOTA SOLOK DENGAN MENGGUNAKAN PESAWAT TANPA AWAK ABSTRAK
 APLIKASI FOTO UDARA UNTUK MEMPREDIKSI POTENSI SAWAH KOTA SOLOK DENGAN MENGGUNAKAN PESAWAT TANPA AWAK Fakultas Teknologi Pertanian Universitas Andalas, Padang, Sumatera Barat 25163, Indonesia E-mail: fadliirsyad_ua@yahoo.com
APLIKASI FOTO UDARA UNTUK MEMPREDIKSI POTENSI SAWAH KOTA SOLOK DENGAN MENGGUNAKAN PESAWAT TANPA AWAK Fakultas Teknologi Pertanian Universitas Andalas, Padang, Sumatera Barat 25163, Indonesia E-mail: fadliirsyad_ua@yahoo.com
BAB I PENDAHULUAN. 1 Universitas Internasional Batam
 BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat terbang model UAV (Unmanned Aerial Vehicle) telah berkembang dengan sangat pesat dan menjadi salah satu area penelitian yang diprioritaskan. Beberapa jenis
BAB I PENDAHULUAN 1.1 Latar Belakang Pesawat terbang model UAV (Unmanned Aerial Vehicle) telah berkembang dengan sangat pesat dan menjadi salah satu area penelitian yang diprioritaskan. Beberapa jenis
BAB I PENDAHULUAN 1.1. Latar Belakang
 1 BAB I PENDAHULUAN 1.1. Latar Belakang UAV (Unmanned Aireal Vehicle) adalah pesawat tanpa awak yang dapat berotasi secara mandiri atau dikendalikan dari jarak jauh oleh seorang pilot (Bone, 2003). Pada
1 BAB I PENDAHULUAN 1.1. Latar Belakang UAV (Unmanned Aireal Vehicle) adalah pesawat tanpa awak yang dapat berotasi secara mandiri atau dikendalikan dari jarak jauh oleh seorang pilot (Bone, 2003). Pada
PENGARUH PAYLOAD TERHADAP CLIMB PERFORMANCE HELIKOPTER SYNERGY N9
 PENGARUH PAYLOAD TERHADAP CLIMB PERFORMANCE HELIKOPTER SYNERGY N9 Raden Gugi Iriandi 1, FX. Djamari 2 Program Studi Teknik Penerbangan Fakultas Teknik Universitas Nurtanio Bandung ABSTRAK Ketika helikopter
PENGARUH PAYLOAD TERHADAP CLIMB PERFORMANCE HELIKOPTER SYNERGY N9 Raden Gugi Iriandi 1, FX. Djamari 2 Program Studi Teknik Penerbangan Fakultas Teknik Universitas Nurtanio Bandung ABSTRAK Ketika helikopter
Perancangan Sistem Radio Pengendali Robot Terbang Nirawak
 Jurnal AL-AZHAR INDONESIA SERI SAINS DAN TEKNOLOGI, Vol. 3, No. 1, Maret 2015 39 Perancangan Sistem Radio Pengendali Robot Terbang Nirawak Octarina Nur Samijayani, Suci Rahmatia, Tio Apridinata Program
Jurnal AL-AZHAR INDONESIA SERI SAINS DAN TEKNOLOGI, Vol. 3, No. 1, Maret 2015 39 Perancangan Sistem Radio Pengendali Robot Terbang Nirawak Octarina Nur Samijayani, Suci Rahmatia, Tio Apridinata Program
DENGAN MENGENDALIKAN RADIO CONTROL
 PENJEJAKAN SET POINT DENGAN MENGENDALIKAN RADIO CONTROL HELIKOPTER (RC HELI) MENGGUNAKAN VISION SENSOR CMUCam2+ Disusun Oleh: Nama : Ivan Winarta NRP : 0522009 Jurusan Teknik Elektro, Fakultas Teknik,
PENJEJAKAN SET POINT DENGAN MENGENDALIKAN RADIO CONTROL HELIKOPTER (RC HELI) MENGGUNAKAN VISION SENSOR CMUCam2+ Disusun Oleh: Nama : Ivan Winarta NRP : 0522009 Jurusan Teknik Elektro, Fakultas Teknik,
LAPORAN AKHIR PROGRAM KREATIVITAS MAHASISWA
 LAPORAN AKHIR PROGRAM KREATIVITAS MAHASISWA DF-1368: PESAWAT KENDALI OTOMATIS BERBAHAN STYROFOAM SEBAGAI PEMANTAU AREAL LAHAN SECARA REAL-TIME MONITORING BIDANG KEGIATAN PKM-KARSA CIPTA Diusulkan oleh:
LAPORAN AKHIR PROGRAM KREATIVITAS MAHASISWA DF-1368: PESAWAT KENDALI OTOMATIS BERBAHAN STYROFOAM SEBAGAI PEMANTAU AREAL LAHAN SECARA REAL-TIME MONITORING BIDANG KEGIATAN PKM-KARSA CIPTA Diusulkan oleh:
BAB 1 PENDAHULUAN. wahana terbang tanpa awak, teknologi tersebut disebut Unmanned Aerial Vehicle
 1.1. Latar Belakang Masalah BAB 1 PENDAHULUAN Seiring perkembangan teknologi telekomunikasi dan dirgantara menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokasi tertentu
1.1. Latar Belakang Masalah BAB 1 PENDAHULUAN Seiring perkembangan teknologi telekomunikasi dan dirgantara menghasilkan suatu teknologi yang menggabungkan antara informasi suatu keadaan lokasi tertentu
KONTROL KESTABILAN QUADCOPTER DENGAN MENGGUNAKAN SENSOR GYROSCOPE ITG 3205 LAPORAN AKHIR. oleh : NURMANSYAH
 KONTROL KESTABILAN QUADCOPTER DENGAN MENGGUNAKAN SENSOR GYROSCOPE ITG 3205 LAPORAN AKHIR Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro Program Studi Teknik
KONTROL KESTABILAN QUADCOPTER DENGAN MENGGUNAKAN SENSOR GYROSCOPE ITG 3205 LAPORAN AKHIR Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro Program Studi Teknik
PENDAHULUAN Latar Belakang Parrot AR.Drone
 PENDAHULUAN Latar Belakang UAV (Unmanned Aerial Vehicle) atau pesawat tanpa awak atau drone adalah sebuah mesin yang mampu terbang dan dikendalikan oleh pilot dari jarak jauh. Pergerakan UAV sendiri dipengaruhi
PENDAHULUAN Latar Belakang UAV (Unmanned Aerial Vehicle) atau pesawat tanpa awak atau drone adalah sebuah mesin yang mampu terbang dan dikendalikan oleh pilot dari jarak jauh. Pergerakan UAV sendiri dipengaruhi
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Fotografi merupakan suatu kegiatan yang hampir dilakukukan oleh semua orang. Kegiatan fotografi ini dilakukan baik dengan kamera untuk professional maupun menggunakan
BAB I PENDAHULUAN 1.1 Latar Belakang Fotografi merupakan suatu kegiatan yang hampir dilakukukan oleh semua orang. Kegiatan fotografi ini dilakukan baik dengan kamera untuk professional maupun menggunakan
BAB I PENDAHULUAN I.1
 BAB I PENDAHULUAN I.1 Latar Belakang Unmanned Aerial Vehicle (UAV) banyak dikembangkan dan digunakan di bidang sipil maupun militer seperti pemetaan wilayah, pengambilan foto udara, pemantauan pada lahan
BAB I PENDAHULUAN I.1 Latar Belakang Unmanned Aerial Vehicle (UAV) banyak dikembangkan dan digunakan di bidang sipil maupun militer seperti pemetaan wilayah, pengambilan foto udara, pemantauan pada lahan
Perancangan Sistem Tele-Navigation Pada Pesawat Tanpa Awak(Micro UAV)
") Perancangan Sistem Tele-Navigation Pada Pesawat Tanpa Awak(Micro UAV) Agus Basukesti Sekolah Tinggi Teknologi Adisutjipto Jl Janti Blok R Lanud Adisutjipto Yogyakarta Agus_basukesti@yahoo.com Abstrak Sistem
Perancangan Sistem Tele-Navigation Pada Pesawat Tanpa Awak(Micro UAV) Agus Basukesti Sekolah Tinggi Teknologi Adisutjipto Jl Janti Blok R Lanud Adisutjipto Yogyakarta Agus_basukesti@yahoo.com Abstrak Sistem
Tedy Zulkarnain 1, Erwin Susanto, S.T., M.T., PhD 2, Agung Surya Wibowo, S.T., M.T. 3
 PERANCANGAN DAN IMPLEMENTASI AUTONOMOUS QUADCOPTER DENGAN KEMAMPUAN FOLLOW ME YANG TERINTEGRASI PADA ANDROID DESIGN AND IMPLEMENTATION OF ANDROID - BASED FOLLOW ME APPLICATION ON AN AUTONOMOUS QUADCOPTER
PERANCANGAN DAN IMPLEMENTASI AUTONOMOUS QUADCOPTER DENGAN KEMAMPUAN FOLLOW ME YANG TERINTEGRASI PADA ANDROID DESIGN AND IMPLEMENTATION OF ANDROID - BASED FOLLOW ME APPLICATION ON AN AUTONOMOUS QUADCOPTER
BAB 3 PEMBAHASAN START DATA KALIBRASI PENGUKURAN OFFSET GPS- KAMERA DATA OFFSET GPS- KAMERA PEMOTRETAN DATA FOTO TANPA GPS FINISH
 BAB 3 PEMBAHASAN Pada bab ini dibahas prosedur yang dilakukan pada percobaan ini. Fokus utama pembahasan pada bab ini adalah teknik kalibrasi kamera, penentuan offset GPS-kamera, akuisisi data di lapangan,
BAB 3 PEMBAHASAN Pada bab ini dibahas prosedur yang dilakukan pada percobaan ini. Fokus utama pembahasan pada bab ini adalah teknik kalibrasi kamera, penentuan offset GPS-kamera, akuisisi data di lapangan,
PENGUKURAN KEKOTAAN. Lecture Note: by Sri Rezki Artini, ST., M.Eng Surveying and Mapping Study Program Dept. Of Geodetic Engineering
 PENGUKURAN KEKOTAAN Lecture Note: by Sri Rezki Artini, ST., M.Eng Surveying and Mapping Study Program Dept. Of Geodetic Engineering INDO GLOBAL MANDIRI UNIVERSITY PENGINDERAAN JAUH Penginderaan jauh (inderaja)
PENGUKURAN KEKOTAAN Lecture Note: by Sri Rezki Artini, ST., M.Eng Surveying and Mapping Study Program Dept. Of Geodetic Engineering INDO GLOBAL MANDIRI UNIVERSITY PENGINDERAAN JAUH Penginderaan jauh (inderaja)
BERITA NEGARA REPUBLIK INDONESIA
 BERITA NEGARA REPUBLIK INDONESIA No.723, 2015 KEMENHUB. Pesawat Udara. Tanpa Awak. Ruang Udara. Indonesia. Pengoperasian. Pengendalian. PERATURAN MENTERI PERHUBUNGAN REPUBLIK INDONESIA NOMOR PM 90 TAHUN
BERITA NEGARA REPUBLIK INDONESIA No.723, 2015 KEMENHUB. Pesawat Udara. Tanpa Awak. Ruang Udara. Indonesia. Pengoperasian. Pengendalian. PERATURAN MENTERI PERHUBUNGAN REPUBLIK INDONESIA NOMOR PM 90 TAHUN
RANCANG BANGUN DAN IMPLEMENTASI PATH BUILDER PADA QUADCOPTER. Design and implementation mapping of certain waypoint on quadcopter
 ISSN : 2355-9365 e-proceeding of Engineering : Vol.3, No.3 December 2016 Page 4043 RANCANG BANGUN DAN IMPLEMENTASI PATH BUILDER PADA QUADCOPTER Design and implementation mapping of certain waypoint on
ISSN : 2355-9365 e-proceeding of Engineering : Vol.3, No.3 December 2016 Page 4043 RANCANG BANGUN DAN IMPLEMENTASI PATH BUILDER PADA QUADCOPTER Design and implementation mapping of certain waypoint on
APLIKASI GPS PADA QUADCOPTER SEBAGAI PENGONTROL HOLD POSITION
 APLIKASI GPS PADA QUADCOPTER SEBAGAI PENGONTROL HOLD POSITION LAPORAN AKHIR Disusun Sebagai Salah Satu Syarat Menyelesaikan Pendidikan Diploma III pada Jurusan Teknik Elektro Program Studi Teknik Elektronika
APLIKASI GPS PADA QUADCOPTER SEBAGAI PENGONTROL HOLD POSITION LAPORAN AKHIR Disusun Sebagai Salah Satu Syarat Menyelesaikan Pendidikan Diploma III pada Jurusan Teknik Elektro Program Studi Teknik Elektronika
BAB IV PENGUJIAN ALAT
 BAB IV PENGUJIAN ALAT 4.1. Menyalakan Modul APM Gambar 4.1 Modul APM Modul APM yang dipakai pada tugas akhir ini adalah modul Arduflyer versi 2.5, dengan merk RCTimer. Modul APM yang baru datang dalam
BAB IV PENGUJIAN ALAT 4.1. Menyalakan Modul APM Gambar 4.1 Modul APM Modul APM yang dipakai pada tugas akhir ini adalah modul Arduflyer versi 2.5, dengan merk RCTimer. Modul APM yang baru datang dalam
Pemetaan Distribusi Gas Polutan Menggunakan Quadcopter Berbasis Autonomous Waypoint Navigation
 A154 Pemetaan Distribusi Gas Polutan Menggunakan Quadcopter Berbasis Autonomous Waypoint Navigation Irfan Fachrudin Priyanta, Muhammad Rivai, Rudy Dikairono Jurusan Teknik Elektro, Fakultas Teknologi Industri,
A154 Pemetaan Distribusi Gas Polutan Menggunakan Quadcopter Berbasis Autonomous Waypoint Navigation Irfan Fachrudin Priyanta, Muhammad Rivai, Rudy Dikairono Jurusan Teknik Elektro, Fakultas Teknologi Industri,
4. HASIL DAN PEMBAHASAN
 4. HASIL DAN PEMBAHASAN Hasil penelitian ini adalah sebuah prototip Tricopter dengan bentuk dasar berupa segitiga sama sisi dengan panjang sisi 20 cm. Pada tiap-tiap sudut segitiga tersebut terdapat perpanjangan
4. HASIL DAN PEMBAHASAN Hasil penelitian ini adalah sebuah prototip Tricopter dengan bentuk dasar berupa segitiga sama sisi dengan panjang sisi 20 cm. Pada tiap-tiap sudut segitiga tersebut terdapat perpanjangan
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Penggunaan kendaraan bermotor khususnya di Indonesia kini semakin meningkat, hal itu menyebabkan polusi udara pada suatu perkotaan meningkat. Munculah banyak pergerakan
BAB I PENDAHULUAN 1.1 Latar Belakang Penggunaan kendaraan bermotor khususnya di Indonesia kini semakin meningkat, hal itu menyebabkan polusi udara pada suatu perkotaan meningkat. Munculah banyak pergerakan
BAB I PENDAHULUAN. 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Roket merupakan sebuah wahana antariksa yang dapat digunakan untuk menunjang kemandirian dan kemajuan bangsa pada sektor lain. Selain dapat digunakan untuk misi perdamaian
BAB I PENDAHULUAN 1.1 Latar Belakang Roket merupakan sebuah wahana antariksa yang dapat digunakan untuk menunjang kemandirian dan kemajuan bangsa pada sektor lain. Selain dapat digunakan untuk misi perdamaian
p o t r e t u d a r a
 SOFTWARE ada di dalam Micro-SD RTKLIB/ RTKCONV untuk konversi data LOG Rinex RTKLIB/RTKPOST untuk Post Processing (PPK) Program Android untuk instalasi program RTKGPS+ dan command nya Demo Proses Data
SOFTWARE ada di dalam Micro-SD RTKLIB/ RTKCONV untuk konversi data LOG Rinex RTKLIB/RTKPOST untuk Post Processing (PPK) Program Android untuk instalasi program RTKGPS+ dan command nya Demo Proses Data
BAB I PENDAHULUAN Latar Belakang
 1.1. Latar Belakang BAB I PENDAHULUAN Indonesia merupakan negara yang memiliki banyak obyek wisata yang tersebar di berbagai pulau di seluruh Indonesia, baik itu wisata alam, wisata kerajinan, maupun wisata
1.1. Latar Belakang BAB I PENDAHULUAN Indonesia merupakan negara yang memiliki banyak obyek wisata yang tersebar di berbagai pulau di seluruh Indonesia, baik itu wisata alam, wisata kerajinan, maupun wisata
3. METODE PENELITIAN
 3. METODE PENELITIAN 3.1. Waktu dan Lokasi Penelitian Penelitian ini dilaksanakan pada bulan Januari 2011 sampai dengan Desember 2011. Kegiatan penelitian ini terdiri dari dua bagian, yaitu pembuatan alat
3. METODE PENELITIAN 3.1. Waktu dan Lokasi Penelitian Penelitian ini dilaksanakan pada bulan Januari 2011 sampai dengan Desember 2011. Kegiatan penelitian ini terdiri dari dua bagian, yaitu pembuatan alat
PENGONTROLAN MOTOR BRUSHLESS PADA QUADCOPTER MENGGUNAKAN ELECTRONIC SPEED CONTROL (ESC) LAPORAN AKHIR
 LAPORAN AKHIR") PENGONTROLAN MOTOR BRUSHLESS PADA QUADCOPTER MENGGUNAKAN ELECTRONIC SPEED CONTROL (ESC) LAPORAN AKHIR Disusun Untuk Menyelesaikan Pendidikan Program Diploma III Pada Jurusan Teknik Elektro Program Studi
PENGONTROLAN MOTOR BRUSHLESS PADA QUADCOPTER MENGGUNAKAN ELECTRONIC SPEED CONTROL (ESC) LAPORAN AKHIR Disusun Untuk Menyelesaikan Pendidikan Program Diploma III Pada Jurusan Teknik Elektro Program Studi
PERANCANGAN DAN IMPLEMENTASI GOLDEN RATIO PADA DESAIN MEKANIK DAN ELEKTRIK AERO ROBOTIK
 PERANCANGAN DAN IMPLEMENTASI GOLDEN RATIO PADA DESAIN MEKANIK DAN ELEKTRIK AERO ROBOTIK DESIGN AND IMPLEMENTATION GOLDEN RATIO IN MECHANICAL AND ELECTRICAL DESIGN AERO ROBOTIC Suharmin Bahri 1, Mohamad
PERANCANGAN DAN IMPLEMENTASI GOLDEN RATIO PADA DESAIN MEKANIK DAN ELEKTRIK AERO ROBOTIK DESIGN AND IMPLEMENTATION GOLDEN RATIO IN MECHANICAL AND ELECTRICAL DESIGN AERO ROBOTIC Suharmin Bahri 1, Mohamad
C I N I A. Survei dan Pemetaan Untuk Perencanaan Jaringan Gas Bumi Bagi Rumah Tangga Menggunakan Metode Terrestrial dan Fotogrametri Jarak Dekat
 C I N I A The 2 nd Conference on Innovation and Industrial Applications (CINIA 2016) Survei dan Pemetaan Untuk Perencanaan Jaringan Gas Bumi Bagi Rumah Tangga Menggunakan Metode Terrestrial dan Fotogrametri
C I N I A The 2 nd Conference on Innovation and Industrial Applications (CINIA 2016) Survei dan Pemetaan Untuk Perencanaan Jaringan Gas Bumi Bagi Rumah Tangga Menggunakan Metode Terrestrial dan Fotogrametri
Navigation and Control System of Quadrotor Helicopter
 Navigation and Control System of Quadrotor Helicopter Didik Setyo Purnomo, ST, M.Eng #1, Anggota IEEE, Nu Rhahida Arini, ST, M.T #2, Bachtiar Septiawan #3 Nu Rhahida Arini is with the Department of Mechatronics
Navigation and Control System of Quadrotor Helicopter Didik Setyo Purnomo, ST, M.Eng #1, Anggota IEEE, Nu Rhahida Arini, ST, M.T #2, Bachtiar Septiawan #3 Nu Rhahida Arini is with the Department of Mechatronics
BAB III PERANCANGAN ALAT. berasal dari motor. Selain kuat rangka juga harus ringan. Rangka terdiri dari beberapa bagian yaitu:
 BAB III PERANCANGAN ALAT 3.1. Rangka Drone Rangka atau frame merupakan struktur yang menjadi tempat dudukan untuk semua komponen. Rangka harus kaku dan dapat meminimalkan getaran yang berasal dari motor.
BAB III PERANCANGAN ALAT 3.1. Rangka Drone Rangka atau frame merupakan struktur yang menjadi tempat dudukan untuk semua komponen. Rangka harus kaku dan dapat meminimalkan getaran yang berasal dari motor.
IMPLEMENTASI DJI NAZA M-LITE PADA QUADCOPTER
 IMPLEMENTASI DJI NAZA M-LITE PADA QUADCOPTER Tri Bugo Prakoso Program Studi Mekatronika, Fakultas Teknik, Universitas Truojoyo Madura Jl. Raya Telang, PO.Box. 2 Kamal Bangkalan Madura Email : tribugo@gmail.com
IMPLEMENTASI DJI NAZA M-LITE PADA QUADCOPTER Tri Bugo Prakoso Program Studi Mekatronika, Fakultas Teknik, Universitas Truojoyo Madura Jl. Raya Telang, PO.Box. 2 Kamal Bangkalan Madura Email : tribugo@gmail.com
BAB I PENDAHULUAN 1.1 Latar Belakang dan Permasalahan
 BAB I PENDAHULUAN 1.1 Latar Belakang dan Permasalahan Pesawat tanpa awak atau Unmanned Aerial Vehicle (UAV) kini menjadi suatu kebutuhan di dalam kehidupan untuk berbagai tujuan dan fungsi. Desain dari
BAB I PENDAHULUAN 1.1 Latar Belakang dan Permasalahan Pesawat tanpa awak atau Unmanned Aerial Vehicle (UAV) kini menjadi suatu kebutuhan di dalam kehidupan untuk berbagai tujuan dan fungsi. Desain dari