DISTRIBUTED CONTROL SYSTEM CENTUM CS3000
|
|
|
- Hengki Makmur
- 6 tahun lalu
- Tontonan:
Transkripsi

1 Seminar Tugas Akhir PERANCANGAN SISTEM PENGENDALIAN LEVEL PADA GLYCOL CONTACTOR BERBASIS SOFTWARE DISTRIBUTED CONTROL SYSTEM CENTUM CS3000 DENGAN SELF TUNING PID PADA DEHIDRATION UNIT DI KANGEAN ENERGY INDONESIA LTD Oleh : Sulhan Efendi Dosen Pembimbing : Hendra Cordova, ST. MT JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2010
2 Latar Belakang Gas H 2 O adalah suatu gas yang mudah membeku jika terkena temperatur yang rendah. Dalam Glycol Contactor sendiri, plant yang digunakan untuk mengabsorbsi kandungan H 2 O adalah Packing (tray). Diperlukan suatu teknologi yang tinggi untuk mengendalikan dan mengoptimalisasi otomatisasi pada suatu proses di industry. Diperlukan juga sistem pengendalian yang secara kontinue dan otomatis mengukur karakteristik statik dan dinamik plant, sehingga diperoleh optimal control dalam proses tersebut. Perumusan Masalah Bagaimana merancang sebuah simulasi dan pemodelan sistem pengendalian level pada Glycol Contactor dalam sistem kontrol terdistribusi dengan menggunakan software DCS CENTUM CS3000 Yokogawa dengan mode kontrol Self Tuning PID.
3 TUJUAN Untuk merancang dan mensimulasikan system pengendalian level pada plant Glycol Contactor dalam Distributed Control System (DCS) dengan menggunakan software DCS Centum CS3000 Yokogawa dengan mode kontrol Self Tuning PID. Batasan Masalah Adapun Pendekatan masalah yang digunakan pada penelitian ini adalah : Plant yang menjadi objek dalam Tugas Akhir ini yaitu Glycol Contactor pada Dehidration Unit di Kangean Energy Indonesia Ltd. Pengambilan data untuk simulasi dilakukan pada saat kondisi Glycol Contactor normal operation. Mode kontroller yang digunakan yaitu mode kontrol Self Tuning PID Variabel yang dikendalikan dalam proses absorbsi pada Glycol Contactor hanya level. Software yang digunakan yaitu software DCS Centum CS3000 Yokogawa dan Simulink Matlab.
4 Diagram Alir Penelitian
5
6 Glycol Contactor (1) Glycol Contactor adalah suatu kolom atau tabung tempat terjadinya proses pengabsorbsi (penyerapan) dari zat yang dilewatkan di kolom tersebut. Glycol Contactor ini menggabungkan contacting tower dan inlet gas scrubber dalam satu vessel yang integral dengan scrubber pada bagian paling bawah. Adapun liquid yang digunakan untuk memisahkan gas H 2 O ini adalah Triethylene Glycol (TEG).


7 Glycol Contactor (2)
8 Distributed Control System (DCS) Distributed Control System (DCS) merupakan suatu sistem yang mendistribusikan berbagai fungsi yang digunakan untuk mengendalikan berbagai variabel proses dan unit operasi proses menjadi suatu pengendalian yang terpusat pada suatu control room dengan berbagai fungsi pengendalian, monitoring dan optimasi.
9 Secara umum, DCS dapat dibagi menjadi 3 bagian, yaitu : 1. Operator Station Operator Station digunakan untuk mengumpulkan data operasi proses serta menampilkan dan mengolah data dari proses yang terjadi pada plant. 2. Control Station Digunakan sebagai control unit untuk mengendalikan variabel variabel yang dikendalikan pada proses. Berikut adalah komponen dari FCS: Central Processor Unit (CPU) Catu daya (Power Supply Unit, PSU) Modul masukan/keluaran (I/O modules, IOM) 3. Sistem Komunikasi Sarana pertukaran data antara operator station, control station dan proses. Sarana komunikasi ini juga bisa dapat digunakan untuk menghubungkan DCS dengan sistem lain seperti PLC, SCADA system.
10 Function Block pada Control Drawing 1. Self Tuning Controller (STC) PID Block STC-PID Block merupakan gabungan antara STC dan PID, digunakan untuk mengeset parameter P,I dan D secara otomatis sehingga diperoleh optimal control pada karakter proses statis dan dinamis dan mengurangi beban tuning pada saat mulai proses awal. 2. LAG Block LAG Block digunakan ketika melakukan proses pemfilteran sinyal input atau untuk mensimulasikan karakteristik dari proses.
11 3. DLAYBlock DLAY Block (Dead Time Block) digunakan untuk mensimulasikan /memperformansikan karakteristik delay time maupun dead time. 4. FOUT Block FOUT Block (The cascade signal distributor) digunakan untuk mendistribusikan sinyal setpoint cascade dari blok lain ke beberapa blok.
12 5. CALCU Block CALCU Block (Calculation Block) digunakan saat melakukan algoritma perhitungan tertentu. 6. INPUT INDIKATOR Block (PVI) INPUT INDIKATOR Block adalah block yang menerima sinyal input dari block yang lain, kemudian mengindikasikan sinyal tersebut sebagai proses variabel.

13 Self Tuning Controller PID Self Tuning adalah struktur pengendali yang termasuk dalam sistem pengendalian adaptive, yaitu sistem pengendalian yang secara kontinue dan otomatis mengukur karakteristik dinamik plant. Membandingkannya dengan karakteristik dinamik yang diinginkan dan menggunakan selisih tersebut untuk mengubah parameter sistem yang akan diatur.
14 Persamaan Kesetimbangan Massa Glycol Contactor d( M dt xi ) = Lxi 1+ Vyi+ 1 L xi V yi L V M W x i cair) y i gas) = laju aliran cairan (kgmole/hr) = Laju aliran gas (kgmole/hr) = perpindahan massa cair dalam tiap kolom = perpindahan massa gas dalam tiap kolom = mole zat terlarut dalam fase cair(mole terlarut/mole = mole zat terlarut dalam fase gas (mole terlarut/mole
15 Pemodelan Matematis Proses Perubahan massa cairan yang terakumulasi sama dengan penjumlahan laju aliran gas dan laju aliran cairan pada tray. [perubahan massa terakumulasi] = [aliran massa input] [aliran massa output] Dimana : M B = Cairan yang tertahan pada dasar kolom. F DR = Laju aliran dry gas (kg/mnt) F WT = Laju aliran wet gas pada bagian stripping (kg/mnt) F M = Laju aliran cairan yang meninggalkan dasar kolom (kg/mnt) F G = Laju aliran Triethylene Glycol (TEG) (kg/mnt)
16 Karena M B = ρah maka persamaan menjadi : Dengan : ρ = Massa jenis cairan yang tertahan pada dasar kolom (kg/m 3 ) A = Luas melintang kolom (m 2 ) h = Ketinggian permukaan cairan (m) Dengan : Penyederhanaan persamaan menjadi : Setelah memasukkan nilai-nilai variabel yang ada pada persamaan diatas maka diperoleh :
17 Perancangan Level Transmitter Secara umum, transfer function dari level transmitter dapat didekati dengan sistem orde 1 sebagaimana persamaan dibawah ini : L o L ( s) = τ K LT s +11 Gain Transmitter dapat diperoleh sebagai berikut : K LT Besarnya time constant (τ LT ) adalah 0,76 detik i Sehingga persamaan transfer function level transmitter adalah LT Span _ Output = Span _ Input L L o i ( s) = 12,39 0,76s+ 1
18 Perancangan Control Valve Adapun transfer function control valve dapat didekati dengan sistem orde 1 sebagaimana persamaan dibawah ini : CV CV o i ( s) = τ G CV CV + 1 Gain Valve dapat diperoleh sebagai berikut : G Span _ output 1 = = CV Span _ input 16 ma Besarnya time constant (τ LT ) adalah 1,79 detik Sehingga persamaan transfer function control valve adalah CV CV o i ( s) 0,45 = 1,79s+ 1


19 Perancangan Function Block Diagram pada Control Drawing Pada dasarnya Control Drawing mempunyai tujuan untuk mendefinisikan algoritma pengendalian maupun monitoring yang akan dikerjakan oleh sistem dengan saling mengkonfigurasikan function block terkait.
20 Diagram Blok Pengendalian Level Glycol Contactor CV
.")
21 Design Human Interface Station (HIS) Display Pada tahap ini dilakukan perancangan tampilan grafis pada Human Interface Station (HIS) yang digunakan untuk keperluan monitoring dan operasi. Human Machine Interface dibuat dengan menggunakan tipe desktop Human Interface Station (HIS). Selain menjalankan fungsi monitoring dan operasi, HIS diatas juga di setting untuk dapat melakukan pekerjaan engineering.


22 Start-Up Plant Simulasi DCS
23 Tuning PID dengan Metode Osilasi
24 Dari grafik respon diatas didapatkan nilai Gain Ultimate atau PBu = 407,6 dan nilai Periode Ultimate atau Pu = 15,2 detik. Sehingga dengan menggunakan tabel perhitungan metode osilasi diperoleh parameter tuning PID controller sebagai berikut, untuk hasil perhitungan tuning PI diperoleh : P : PBu / 0,45 = 905,7 I : Pu / 1,2 = 12,6 D: 0 Sedangkan untuk hasil perhitungan dengan parameter tuning PID diperoleh : P : PBu / 0,6 = 679,3 I : Pu / 2 = 7,6 D: Pu / 8 = 1,9
 2,1 Ts (s) 117 Max. Overshoot (mm) 105,1 Ess (mm) 0,2")
25 Trend Respon dengan PI Parameter PI Set Point (mm) 600 Mv (%) 2,1 Ts (s) 117 Max. Overshoot (mm) 105,1 Ess (mm) 0,2
26 Trend Respon dengan STC-PID Parameter PID Set Point (mm) 600 Mv (%) 2,1 Ts (s) 57 Max. Overshoot (mm) 32,2 Ess (mm) 0,1
27 Dari grafik di atas dapat dilihat bahwa tuning dengan PID memiliki trend respon yang lebih cepat dibandingkan PI. Hal ini dapat diartikan bahwa proses pada model glycol contactor ini membutuhkan energi extra dengan menambahkan time derivative pada tuning untuk lebih mempercepat reaksi.
 Mv (%) t s (detik) Max (mm)")

28 Tracking Set Point dengan PI No Set Point (%) Mv (%) t s (detik) Max (mm) Ess (%) , , , , , , , ,7 0
 1 400 1,4 59 21,2 0 2 600 2,1 55 11,3 0 3 500 1,8 53 5,6 0 4 800 2,8 58 16,5 0")
29 Tracking Set Point dengan STC-PID No Set Point Mv t s Max Ess (%) (%) (detik) (mm) (%) , , , , ,8 53 5, , ,5 0
30 Uji Penambahan Load 20% terhadap Tuning PI Dari grafik di atas diperoleh waktu yang dibutuhkan untuk kembali pada kondisi steady sekitar 65 detik


31 Uji Pengurangan Load 20% terhadap Tuning PI Dari grafik di atas diperoleh waktu yang dibutuhkan untuk kembali pada kondisi steady sekitar 65 detik
32 Uji Penambahan Load 20% terhadap STC-PID Dari grafik di atas diperoleh waktu yang dibutuhkan untuk kembali pada kondisi steady sekitar 45 detik
33 Uji Pengurangan Load 20% terhadap STC-PID Dari grafik di atas diperoleh waktu yang dibutuhkan untuk kembali pada kondisi steady sekitar 45 detik
34 Simulasi Self Tuning Controller PID dengan MATLAB
35 Adaptive Control pp2a_2

 21,3 Ts (s) 37")
36 Uji Trend Respon STC-PID dengan MATLAB Parameter PID Set Point (mm) 600 Max. Overshoot (mm) 21,3 Ts (s) 37 Ess (mm) 0,1
37 Perbandingan Respon STC-PID pada DCS dan MATLAB
38 Uji Disturbance STC-PID Matlab


39 Uji Penambahan Disturbance terhadap STC-PID Matlab Max Over= 32 Max Disturb= 6
 KP= -0,1------(-61,2)/-64,9 Ti=")
40 Trend Respon Mode Tuning STC-PID dengan Disturbance pada Matlab (1) KP= -0, (-61,2)/-64,9 Ti= -3, ,8/0,825
41 Trend Respon Mode Tuning STC-PID dengan Disturbance pada Matlab (2) Td= -1, ,1697/0,1688


42 Pengujian Virtual Human Interface Station (HIS)



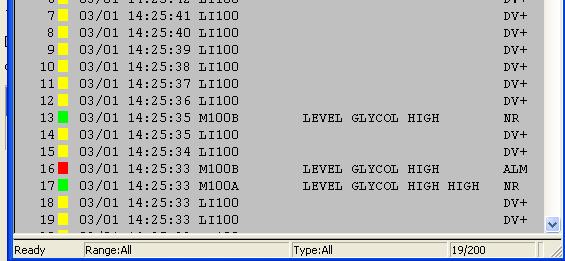
43 Pengujian Alarm Warning Message Announciator
44 KESIMPULAN Setelah dilakukan serangkaian metodologi, simulasi dan pengujian pada pengerjaan Tugas Akhir ini, maka dapat diambil beberapa kesimpulan sebagai berikut : Dengan menggunakan metode osilasi dengan sistem loop tertutup diperoleh hasil parameter tuning PI dengan PB = 905,7 ; Ti = 12,6 ; Td=0. Sedangkan untuk parameter tuning PID diperoleh PB = 679,3 ; Ti = 7,6 ; Td = 1,9. Dari respon trend yang dihasilkan antara tuning PI dengan PID diperoleh bahwa dengan tuning PID menghasilkan waktu untuk menghasilkan reaksi mencapai kondisi steady lebih cepat yaitu 57 detik dibandingkan tuning PI yang mencapai kondisi steady dalam waktu 117 detik. Dari hasil simulasi didapatkan parameter kualitatif keseluruhan dengan DCS pada tuning PI pada saat set point 600 mm yaitu Ts=117 s, Max.Overshoot=105,1 mm dan Ess=0,2. Sedangkan dengan PID controller pada set poin yang sama diperoleh, Ts=57 s, Max.Overshoot=32,2 mm, dan Ess=0,1. Dari hasil simulasi menggunakan Controller Adaptive pp2a_2 didapatkan parameter kualitatif keseluruhan dengan program simulink Matlab pada self tuning PID pada saat setpoint 600 mm yaitu Max. Overshoot=21,3 mm, Ts=37 s dan Ess=0,1. Pada saat level glycol dalam proses dikenai load hingga level mencapai 900 mm hingga 1000 mm maka alarm akan menyala dan Alarm Message akan menampilkan peringatan LEVEL GLYCOL HIGH HIGH, sedangkan pada saat level berada pada level 300 mm hingga 200 mm maka alarm akan aktif menampilkan pesan LEVEL GLYCOL LOW LOW.
45 SARAN Dari hasil tugas akhir ini dapat diberikan saran untuk pengembangan penelitian selanjutnya antara lain : Mengaplikasikan langsung secara online pada DCS dengan mengkoneksikan hasil perancangan pada software CENTUM CS3000 pada PC dengan Field Control Station yang ada.
46 Daftar Pustaka 1. Astrom, Karl J. Wittenmark, Bjorn. Computer Controlled Systems.Prentice- Hall International, Inc. 2. Yokogawa Electric Corp Centum CS3000 Manual - Instruction Manual IM 33S01B30-01E : Yokogawa Electric Corp, Tokyo 3. Gunterus, Frans Falsafah Dasar Sistem Pengendalian Proses. Jakarta : PT Elex Media Komputindo 4. Ogata, Katsuhiko Automatic Control I.New Jersey, USA : Prentice hall 5. Training Division, CENTUM CS3000 Training. ITS, Surabaya : PT. Yokogawa Indonesia 6. Astrom, Karl J. and Hagglund, Tore PID Controllers: Theory, Design, and Tuning. Research Triangle Park, NC : Instrument Society of America 7. Bequette, B. Wayne Process Dynamics Modeling, Analysis, and Simulation, Upper Saddle River, New Jersey : Prentice Hall PTR. 8. Pagerungan Gas Plant Manual Book. Kangean Energy Indonesia Ltd: Pagerungan Island. 9. Bobal, Vladimir Self-Tuning PID Controller. Department of Aumatic Control, Faxculty of Technology Zlin: Czech republic.
47 TERIMA KASIH THANK YOU MATOR SAKALANGKONG
Sedangkan untuk hasil perhitungan dengan parameter tuning PID diperoleh :
 4.2 Self Tuning PID Controller Untuk lebih memaksimalkan fungsi controller maka perlu dilakukan tuning lebih lanjut terhadap parameter PID pada controller yaitu pada nilai PB, Ti, dan Td. Seperti terlihat
4.2 Self Tuning PID Controller Untuk lebih memaksimalkan fungsi controller maka perlu dilakukan tuning lebih lanjut terhadap parameter PID pada controller yaitu pada nilai PB, Ti, dan Td. Seperti terlihat
Desain Kendali pada Sistem Steam Drum Boiler dengan Memperhitungkan Control Valve
 Desain Kendali pada Sistem Steam Drum Boiler dengan Memperhitungkan Control Valve ROFIKA NUR AINI 1206 100 017 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
Desain Kendali pada Sistem Steam Drum Boiler dengan Memperhitungkan Control Valve ROFIKA NUR AINI 1206 100 017 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI. III, aspek keseluruhan dimulai dari Bab I hingga Bab III, maka dapat ditarik
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dibahs mengenai pengujian control reheat desuperheater yang telah dimodelkan pada matlab sebagaimana yang telah dibahas pada bab III, aspek
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dibahs mengenai pengujian control reheat desuperheater yang telah dimodelkan pada matlab sebagaimana yang telah dibahas pada bab III, aspek
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN
 PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN Nazrul Effendy 1), Masrul Solichin 2), Teuku Lukman Nur Hakim 3), Faisal Budiman 4) Jurusan Teknik Fisika, Fakultas
PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN Nazrul Effendy 1), Masrul Solichin 2), Teuku Lukman Nur Hakim 3), Faisal Budiman 4) Jurusan Teknik Fisika, Fakultas
Desain dan Realisasi Sistem Kontrol Proses Melalui Jaringan Menggunakan Distributed Control System Centum CS 3000
 Desain dan Realisasi Sistem Kontrol Proses Melalui Jaringan Menggunakan Distributed Control System Centum CS 3000 D I S U S U N O L E H : F a t w a C a h y o K u s u m o 2 2 0 6. 1 0 0. 1 3 7 DOSEN PEMBIMBING:
Desain dan Realisasi Sistem Kontrol Proses Melalui Jaringan Menggunakan Distributed Control System Centum CS 3000 D I S U S U N O L E H : F a t w a C a h y o K u s u m o 2 2 0 6. 1 0 0. 1 3 7 DOSEN PEMBIMBING:
PERANCANGAN SISTEM CONTROL LEVEL DAN PRESSURE PADA BOILER DI WORKSHOP INSTRUMENTASI BERBASIS DCS CENTUM CS3000 YOKOGAWA
 PERANCANGAN SISTEM CONTROL LEVEL DAN PRESSURE PADA BOILER DI WORKSHOP INSTRUMENTASI BERBASIS DCS CENTUM CS3000 YOKOGAWA Oleh : Awal Mu amar 2404 100 030 Pembimbing : Hendra Cordova ST, MT Fitri Adi Ikandarianto
PERANCANGAN SISTEM CONTROL LEVEL DAN PRESSURE PADA BOILER DI WORKSHOP INSTRUMENTASI BERBASIS DCS CENTUM CS3000 YOKOGAWA Oleh : Awal Mu amar 2404 100 030 Pembimbing : Hendra Cordova ST, MT Fitri Adi Ikandarianto
Perancangan Sistem Pengendalian Level Pada Steam drum dengan Menggunakan Kontroller PID di PT Indonesia Power Ubp Sub Unit Perak-Grati
 JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6 1 Perancangan Sistem Pengendalian Level Pada Steam drum dengan Menggunakan Kontroller PID di PT Indonesia Power Ubp Sub Unit Perak-Grati Rian Apriansyah,
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2014) 1-6 1 Perancangan Sistem Pengendalian Level Pada Steam drum dengan Menggunakan Kontroller PID di PT Indonesia Power Ubp Sub Unit Perak-Grati Rian Apriansyah,
Institut Teknologi Sepuluh Nopember PERANCANGAN SISTEM PENGENDALIAN TEKANAN DAN FLOW UNTUK KEBUTUHAN REFUELING SYSTEM PADA DPPU JUANDA SURABAYA
 PERANCANGAN SISTEM PENGENDALIAN TEKANAN DAN FLOW UNTUK KEBUTUHAN REFUELING SYSTEM PADA DPPU JUANDA SURABAYA Oleh : ITS Institut Teknologi Sepuluh Nopember Arya Dwi Prayoga 2408100097 Pembimbing : Fitri
PERANCANGAN SISTEM PENGENDALIAN TEKANAN DAN FLOW UNTUK KEBUTUHAN REFUELING SYSTEM PADA DPPU JUANDA SURABAYA Oleh : ITS Institut Teknologi Sepuluh Nopember Arya Dwi Prayoga 2408100097 Pembimbing : Fitri
Desain PI Controller menggunakan Ziegler Nichols Tuning pada Proses Nonlinier Multivariabel
 Desain PI Controller menggunakan Ziegler Nichols Tuning pada Proses Nonlinier Multivariabel Poppy Dewi Lestari 1, Abdul Hadi 2 Jurusan Teknik Elektro UIN Sultan Syarif Kasim Riau JL.HR Soebrantas km 15
Desain PI Controller menggunakan Ziegler Nichols Tuning pada Proses Nonlinier Multivariabel Poppy Dewi Lestari 1, Abdul Hadi 2 Jurusan Teknik Elektro UIN Sultan Syarif Kasim Riau JL.HR Soebrantas km 15
Sadra Prattama NRP Dosen Pembimbing: Dr. Bambang Lelono Widjiantoro, ST, MT NIP
 PRESENTASI SEMINAR TUGAS AKHIR Perancangan Sistem Pengendalian Level Pada STRIPPERPV 3300 Dengan Metode FEEDBACK FEEDFORWARD di PT. JOB Pertamina-PetroChina East Java Sadra Prattama NRP. 2406.100.055 Dosen
PRESENTASI SEMINAR TUGAS AKHIR Perancangan Sistem Pengendalian Level Pada STRIPPERPV 3300 Dengan Metode FEEDBACK FEEDFORWARD di PT. JOB Pertamina-PetroChina East Java Sadra Prattama NRP. 2406.100.055 Dosen
STUDI PERFORMANSI SISTEM PENGENDALIAN TEMPERATUR, RELIABILITY DAN SAFETY PADA HEAT EXCHANGER PT. PETROWIDADA GRESIK
 STUDI PERFORMANSI SISTEM PENGENDALIAN TEMPERATUR, RELIABILITY DAN SAFETY PADA HEAT EXCHANGER PT. PETROWIDADA GRESIK NOVAN YUDHA ARMANDA 2409 105 032 DOSEN PEMBIMBING: IR. RONNY DWI NORIYATI M.KES IMAM
STUDI PERFORMANSI SISTEM PENGENDALIAN TEMPERATUR, RELIABILITY DAN SAFETY PADA HEAT EXCHANGER PT. PETROWIDADA GRESIK NOVAN YUDHA ARMANDA 2409 105 032 DOSEN PEMBIMBING: IR. RONNY DWI NORIYATI M.KES IMAM
Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]
![Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]](/thumbs/75/72135311.jpg "Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]") 1 feedback, terutama dalam kecepatan tanggapan menuju keadaan stabilnya. Hal ini disebabkan pengendalian dengan feedforward membutuhkan beban komputasi yang relatif lebih kecil dibanding pengendalian dengan
1 feedback, terutama dalam kecepatan tanggapan menuju keadaan stabilnya. Hal ini disebabkan pengendalian dengan feedforward membutuhkan beban komputasi yang relatif lebih kecil dibanding pengendalian dengan
Makalah Seminar Kerja Praktek
 A-1 Makalah Seminar Kerja Praktek PENGENDALIAN LEVEL AIR PADA BOILER DRUM SIMULATOR MENGGUNAKAN DCS YOKOGAWA CENTUM VP DI LABORATORIUM INSTRUMENTASI PUSDIKLAT MIGAS CEPU Ebtian Apriantoro [1], Wahyudi,
A-1 Makalah Seminar Kerja Praktek PENGENDALIAN LEVEL AIR PADA BOILER DRUM SIMULATOR MENGGUNAKAN DCS YOKOGAWA CENTUM VP DI LABORATORIUM INSTRUMENTASI PUSDIKLAT MIGAS CEPU Ebtian Apriantoro [1], Wahyudi,
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 5 (2), 2013 ISSN :
 Vol 5 (2), 2013 ISSN :") Abstrak Pembuatan Operator Training Simulator Unit Smelter pada Pabrik Pemurnian Tembaga Menggunakan Fasilitas Pemrograman Function Block Distributed Control System Widya Prapti Pratiwi, Estiyanti Ekawati
Abstrak Pembuatan Operator Training Simulator Unit Smelter pada Pabrik Pemurnian Tembaga Menggunakan Fasilitas Pemrograman Function Block Distributed Control System Widya Prapti Pratiwi, Estiyanti Ekawati
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER
 BERBASIS LOGIC SOLVER") PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
pengendali Konvensional Time invariant P Proportional Kp
 Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN INTERLOCK STEAM DRUM DENGAN DUA ELEMEN KONTROL DI PT. INDONESIA POWER UBP SUB UNIT PERAK.
 PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN INTERLOCK STEAM DRUM DENGAN DUA ELEMEN KONTROL DI PT. INDONESIA POWER UBP SUB UNIT PERAK. Seminar Oleh : Wahid Abdurrahman 2409 105 006 Pembimbing : Hendra Cordova
PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN INTERLOCK STEAM DRUM DENGAN DUA ELEMEN KONTROL DI PT. INDONESIA POWER UBP SUB UNIT PERAK. Seminar Oleh : Wahid Abdurrahman 2409 105 006 Pembimbing : Hendra Cordova
PERANCANGAN SISTEM CONTROL LEVEL
 PERANCANGAN SISTEM CONTROL LEVEL DAN PRESSURE PADA BOILER DI WORKSHOP INTRUMENTASI BERBASIS DCS CENTUM CS3000 YOKOGAWA ( Awal Mu amar, Hendra Cordova, Fitri Adi) Jurusan Teknik Fisika FTI ITS Surabaya
PERANCANGAN SISTEM CONTROL LEVEL DAN PRESSURE PADA BOILER DI WORKSHOP INTRUMENTASI BERBASIS DCS CENTUM CS3000 YOKOGAWA ( Awal Mu amar, Hendra Cordova, Fitri Adi) Jurusan Teknik Fisika FTI ITS Surabaya
Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
 JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
Perancangan Sistem Pengendalian Tekanan dan Laju Aliran Untuk Kebutuhan Refueling System Pada DPPU Juanda-Surabaya
 JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Perancangan Sistem Pengendalian Tekanan dan Laju Aliran Untuk Kebutuhan Refueling System Pada DPPU Juanda-Surabaya Arya Dwi Prayoga, Fitri Adi Iskandarianto,
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Perancangan Sistem Pengendalian Tekanan dan Laju Aliran Untuk Kebutuhan Refueling System Pada DPPU Juanda-Surabaya Arya Dwi Prayoga, Fitri Adi Iskandarianto,
PEMODELAN SISTEM PENGENDALI PID DENGAN METODE CIANCONE BERBASIS MATLAB SIMULINK PADA SISTEM PRESSURE PROCESS RIG
 Jurnal Teknik dan Ilmu Komputer PEMODELAN SISTEM PENGENDALI PID DENGAN METODE CIANCONE BERBASIS MATLAB SIMULINK PADA SISTEM PRESSURE PROCESS RIG 38-714 SYSTEM MODELLING WITH PID CONTROLLER APPLYING CIANCONE
Jurnal Teknik dan Ilmu Komputer PEMODELAN SISTEM PENGENDALI PID DENGAN METODE CIANCONE BERBASIS MATLAB SIMULINK PADA SISTEM PRESSURE PROCESS RIG 38-714 SYSTEM MODELLING WITH PID CONTROLLER APPLYING CIANCONE
Kontrol PID Pada Miniatur Plant Crane
 Konferensi Nasional Sistem & Informatika 2015 STMIK STIKOM Bali, 9 10 Oktober 2015 Kontrol PID Pada Miniatur Plant Crane E. Merry Sartika 1), Hardi Sumali 2) Jurusan Teknik Elektro Universitas Kristen
Konferensi Nasional Sistem & Informatika 2015 STMIK STIKOM Bali, 9 10 Oktober 2015 Kontrol PID Pada Miniatur Plant Crane E. Merry Sartika 1), Hardi Sumali 2) Jurusan Teknik Elektro Universitas Kristen
BAB III PERANCANGAN DAN PEMBUATAN SIMULASI
 BAB III PERANCANGAN DAN PEMBUATAN SIMULASI Pada Bab III akan dibahas perancangan simulasi kontrol level deaerator. Pada plant sebenarnya di PLTU Suralaya, untuk proses kontrol level deaerator dibuat di
BAB III PERANCANGAN DAN PEMBUATAN SIMULASI Pada Bab III akan dibahas perancangan simulasi kontrol level deaerator. Pada plant sebenarnya di PLTU Suralaya, untuk proses kontrol level deaerator dibuat di
BAB II TINJAUAN PUSTAKA. Penelitian sebelumnya berjudul Feedforward Feedback Kontrol Sebagai
 BAB II TINJAUAN PUSTAKA 2.1 Studi Pustaka Penelitian sebelumnya berjudul Feedforward Feedback Kontrol Sebagai Pengontrol Suhu Menggunakan Proportional Integral berbasis Mikrokontroler ATMEGA 8535 [3].
BAB II TINJAUAN PUSTAKA 2.1 Studi Pustaka Penelitian sebelumnya berjudul Feedforward Feedback Kontrol Sebagai Pengontrol Suhu Menggunakan Proportional Integral berbasis Mikrokontroler ATMEGA 8535 [3].
IDENTIFIKASI DAN DESAIN CONTROLLER PADA TRAINER FEEDBACK PRESSURE PROCESS RIG Satryo Budi Utomo, Universitas Jember
 IDENTIFIKASI DAN DESAIN CONTROLLER PADA TRAINER FEEDBACK PRESSURE PROCESS RIG 38 714 Abstrac Satryo Budi Utomo, Universitas Jember Satryo.budiutomo@yahoo.com Pressure Process Control of Trainer studying
IDENTIFIKASI DAN DESAIN CONTROLLER PADA TRAINER FEEDBACK PRESSURE PROCESS RIG 38 714 Abstrac Satryo Budi Utomo, Universitas Jember Satryo.budiutomo@yahoo.com Pressure Process Control of Trainer studying
Perancangan Sistem Kontrol Laju Aliran Bahan Bakar Serta Rasio Pembakaran Berdasarkan Nilai Steam Quality Pada Steam Generator
 1 Perancangan Sistem Kontrol Laju Aliran Bahan Bakar Serta Rasio Pembakaran Berdasarkan Nilai Steam Quality Pada Steam Generator Andi Saehul Rizal, Dr.Bambang Lelono W., itri Adi Iskandarianto Jurusan
1 Perancangan Sistem Kontrol Laju Aliran Bahan Bakar Serta Rasio Pembakaran Berdasarkan Nilai Steam Quality Pada Steam Generator Andi Saehul Rizal, Dr.Bambang Lelono W., itri Adi Iskandarianto Jurusan
LOGO OLEH : ANIKE PURBAWATI DOSEN PEMBIMBING : KATHERIN INDRIAWATI, ST.MT.
 LOGO Perancangan Sistem Pengendalian Tekanan Keluaran Steam Separator Dalam Upaya Peningkatan Kualitas Output Steam di PT. Pertamina Geothermal Energy area Kamojang, Jawa Barat OLEH : ANIKE PURBAWATI 2408100037
LOGO Perancangan Sistem Pengendalian Tekanan Keluaran Steam Separator Dalam Upaya Peningkatan Kualitas Output Steam di PT. Pertamina Geothermal Energy area Kamojang, Jawa Barat OLEH : ANIKE PURBAWATI 2408100037
Makalah Seminar Tugas Akhir
 Makalah Seminar Tugas Akhir APLIKASI KENDALI MENGGUNAKAN SKEMA GAIN SCHEDULING UNTUK PENGENDALIAN SUHU CAIRAN PADA PLANT ELECTRIC WATER HEATER Ahmad Shafi Mukhaitir [1], Iwan Setiawan, S.T., M.T. [2],
Makalah Seminar Tugas Akhir APLIKASI KENDALI MENGGUNAKAN SKEMA GAIN SCHEDULING UNTUK PENGENDALIAN SUHU CAIRAN PADA PLANT ELECTRIC WATER HEATER Ahmad Shafi Mukhaitir [1], Iwan Setiawan, S.T., M.T. [2],
Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR
 Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR 2105100166 PENDAHULUAN LATAR BELAKANG Control system : keluaran (output) dari sistem sesuai dengan referensi yang diinginkan Non linear
Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR 2105100166 PENDAHULUAN LATAR BELAKANG Control system : keluaran (output) dari sistem sesuai dengan referensi yang diinginkan Non linear
LEVEL DAN SISTEM PROTEKSI PADA PERTAMINA (PERSERO) RU IV CILACAP
 RU IV CILACAP") PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN SISTEM PROTEKSI PADA KNOCK OUT DRUM 260V106 DI PT PERTAMINA (PERSERO) RU IV CILACAP Oleh : Fitri Noer Laili (2406100034) Pembimbing : Hendra Cordova, ST, MT PENDAHULUAN
PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN SISTEM PROTEKSI PADA KNOCK OUT DRUM 260V106 DI PT PERTAMINA (PERSERO) RU IV CILACAP Oleh : Fitri Noer Laili (2406100034) Pembimbing : Hendra Cordova, ST, MT PENDAHULUAN
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1
 1-6 1") JURNAL TEKNIK POMITS Vol. 1, No. 1, (212) 1-6 1 Perancangan Sistem Pengendalian Tekanan dan Laju Aliran pada Pipa Bahan Bakar untuk Kebutuhan Awal Pembakaran Gas Turbin di Pembangkit Listrik Tenaga Gas
JURNAL TEKNIK POMITS Vol. 1, No. 1, (212) 1-6 1 Perancangan Sistem Pengendalian Tekanan dan Laju Aliran pada Pipa Bahan Bakar untuk Kebutuhan Awal Pembakaran Gas Turbin di Pembangkit Listrik Tenaga Gas
PENERAPAN FUZZY LOGIC CONTROLLER UNTUK MEMPERTAHANKAN KESETABILAN SISTEM AKIBAT PERUBAHAN DEADTIME PADA SISTEM KONTROL PROSES DENGAN DEADTIME
 PENERAPAN FUZZY LOGIC CONTROLLER UNTUK MEMPERTAHANKAN KESETABILAN SISTEM AKIBAT PERUBAHAN DEADTIME PADA SISTEM KONTROL PROSES DENGAN DEADTIME Mukhtar Hanafi Program Studi Teknik Informatika Fakultas Teknik
PENERAPAN FUZZY LOGIC CONTROLLER UNTUK MEMPERTAHANKAN KESETABILAN SISTEM AKIBAT PERUBAHAN DEADTIME PADA SISTEM KONTROL PROSES DENGAN DEADTIME Mukhtar Hanafi Program Studi Teknik Informatika Fakultas Teknik
PERANCANGAN PID SEBAGAI PENGENDALI ph PADA CONTINUOUS STIRRED TANK REACTOR (CSTR)
") PERANCANGAN PID SEBAGAI PENGENDALI ph PADA CONTINUOUS STIRRED TANK REACTOR (CSTR) Fihir, Hendra Cordova Jurusan Teknik Fisika Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kampus ITS
PERANCANGAN PID SEBAGAI PENGENDALI ph PADA CONTINUOUS STIRRED TANK REACTOR (CSTR) Fihir, Hendra Cordova Jurusan Teknik Fisika Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kampus ITS
JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER
 Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta 24 08 100 068 Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK
Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta 24 08 100 068 Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK
BAB 4 SIMULASI MODEL MATEMATIS CSTR BIODIESEL
 BAB 4 SIMULASI MODEL MATEMATIS CSTR BIODIESEL Pada Bab ini akan dilakukan simulasi model matematis yang didapat di dari Bab sebelumnya. Simulasi akan dilakukan pada model CSTR yang lengkap dan model CSTR
BAB 4 SIMULASI MODEL MATEMATIS CSTR BIODIESEL Pada Bab ini akan dilakukan simulasi model matematis yang didapat di dari Bab sebelumnya. Simulasi akan dilakukan pada model CSTR yang lengkap dan model CSTR
Rancang Bangun Sistem Pengendalian Level pada Knock Out Gas Drum Menggunakan Pengendali PID di Plant LNG
 Rancang Bangun Sistem Pengendalian Level pada Knock Out Gas Drum Menggunakan Pengendali PID di Plant LNG Paisal Tajun Aripin 1, Erna Kusuma Wati 1, V. Vekky R. Repi 1, Hari Hadi Santoso 1,2 1 Program Studi
Rancang Bangun Sistem Pengendalian Level pada Knock Out Gas Drum Menggunakan Pengendali PID di Plant LNG Paisal Tajun Aripin 1, Erna Kusuma Wati 1, V. Vekky R. Repi 1, Hari Hadi Santoso 1,2 1 Program Studi
PERANCANGAN REMOTE TERMINAL UNIT (RTU) PADA SIMULATOR PLANT TURBIN DAN GENERATOR UNTUK PENGENDALIAN FREKUENSI MENGGUNAKAN KONTROLER PID
 PADA SIMULATOR PLANT TURBIN DAN GENERATOR UNTUK PENGENDALIAN FREKUENSI MENGGUNAKAN KONTROLER PID") Oleh: Mahsun Abdi / 2209106105 Dosen Pembimbing: 1. Dr.Ir. Mochammad Rameli 2. Ir. Rusdhianto Effendie, MT. Tugas Akhir PERANCANGAN REMOTE TERMINAL UNIT (RTU) PADA SIMULATOR PLANT TURBIN DAN GENERATOR
Oleh: Mahsun Abdi / 2209106105 Dosen Pembimbing: 1. Dr.Ir. Mochammad Rameli 2. Ir. Rusdhianto Effendie, MT. Tugas Akhir PERANCANGAN REMOTE TERMINAL UNIT (RTU) PADA SIMULATOR PLANT TURBIN DAN GENERATOR
DESAIN SISTEM KENDALI TEMPERATUR UAP SUPERHEATER DENGAN METODE FUZZY SLIDING MODE CONTROL
 J. Math. and Its Appl. ISSN: 1829-605X Vol. 13, No. 1, Mei 2016, 37-48 DESAIN SISTEM KENDALI TEMPERATUR UAP SUPERHEATER DENGAN METODE FUZZY SLIDING MODE CONTROL Mardlijah 1, Mardiana Septiani 2,Titik Mudjiati
J. Math. and Its Appl. ISSN: 1829-605X Vol. 13, No. 1, Mei 2016, 37-48 DESAIN SISTEM KENDALI TEMPERATUR UAP SUPERHEATER DENGAN METODE FUZZY SLIDING MODE CONTROL Mardlijah 1, Mardiana Septiani 2,Titik Mudjiati
PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni
 Oleh : Ika Evi Anggraeni") PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni 206 00 03 Dosen Pembimbing : Dr. Erna Apriliani, M.Si Hendra Cordova, ST,
PENGENDALIAN OPTIMAL PADA SISTEM STEAM DRUM BOILER MENGGUNAKAN METODE LINEAR QUADRATIC REGULATOR (LQR) Oleh : Ika Evi Anggraeni 206 00 03 Dosen Pembimbing : Dr. Erna Apriliani, M.Si Hendra Cordova, ST,
Oleh : Dia Putranto Harmay Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc
 Oleh : Dia Putranto Harmay 2105.100.145 Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc Latar Belakang Usman Awan dkk, 2001 Merancang dan membuat dynamometer jenis prony brake dengan menggunakan strain gauge
Oleh : Dia Putranto Harmay 2105.100.145 Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc Latar Belakang Usman Awan dkk, 2001 Merancang dan membuat dynamometer jenis prony brake dengan menggunakan strain gauge
Aplikasi Kendali PID Menggunakan Skema Gain Scheduling Untuk Pengendalian Suhu Cairan pada Plant Electric Water Heater
 Available online at TRANSMISI Website http://ejournal.undip.ac.id/index.php/transmisi TRANSMISI, 12 (1), 21, 27-32 Research Article Aplikasi Kendali Menggunakan Skema Gain Scheduling Untuk Pengendalian
Available online at TRANSMISI Website http://ejournal.undip.ac.id/index.php/transmisi TRANSMISI, 12 (1), 21, 27-32 Research Article Aplikasi Kendali Menggunakan Skema Gain Scheduling Untuk Pengendalian
RANCANG BANGUN SELF TUNING PID KONTROL PH DENGAN METODE PENCARIAN AKAR PERSAMAAN KARAKTERISTIK
 RANCANG BANGUN SELF TUNING PID KONTROL PH DENGAN METODE PENCARIAN AKAR PERSAMAAN KARAKTERISTIK JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Self Tuning PID Kontrol ph Dengan Metode
RANCANG BANGUN SELF TUNING PID KONTROL PH DENGAN METODE PENCARIAN AKAR PERSAMAAN KARAKTERISTIK JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Self Tuning PID Kontrol ph Dengan Metode
Rancang Bangun Self Tuning PID Kontrol ph Dengan Metode Pencarian Akar Persamaan Karakteristik
 JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Self Tuning PID Kontrol ph Dengan Metode Pencarian Akar Persamaan Karakteristik Muhammad Riza Alaydrus, Hendra Cordova ST, MT. Jurusan Teknik
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1 Rancang Bangun Self Tuning PID Kontrol ph Dengan Metode Pencarian Akar Persamaan Karakteristik Muhammad Riza Alaydrus, Hendra Cordova ST, MT. Jurusan Teknik
PERANCANGAN ATTEMPERATURE REHEAT SPRAY MENGGUNAKAN METODE ZIEGLER NICHOLS BERBASIS MATLAB SIMULINK DI PT. INDONESIA POWER UBP SURALAYA
 TUGAS AKHIR PERANCANGAN ATTEMPERATURE REHEAT SPRAY MENGGUNAKAN METODE ZIEGLER NICHOLS BERBASIS MATLAB SIMULINK DI PT. INDONESIA POWER UBP SURALAYA Diajukan guna melengkapi sebagian syarat dalam mencapai
TUGAS AKHIR PERANCANGAN ATTEMPERATURE REHEAT SPRAY MENGGUNAKAN METODE ZIEGLER NICHOLS BERBASIS MATLAB SIMULINK DI PT. INDONESIA POWER UBP SURALAYA Diajukan guna melengkapi sebagian syarat dalam mencapai
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER
 KONTROLER") SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
Ir.Muchammad Ilyas Hs DONY PRASETYA ( ) DOSEN PEMBIMBING :
 DOSEN PEMBIMBING :") Perancangan Sistem Pengendalian Rasio Aliran Udara dan Bahan Bakar Pada Boiler Di Unit Utilitas PT. Trans Pacific Petrochemical Indotama (TPPI) Tuban Dengan Menggunakan Sistem Pengendali PID -Fuzzy OLEH
Perancangan Sistem Pengendalian Rasio Aliran Udara dan Bahan Bakar Pada Boiler Di Unit Utilitas PT. Trans Pacific Petrochemical Indotama (TPPI) Tuban Dengan Menggunakan Sistem Pengendali PID -Fuzzy OLEH
BAB III DINAMIKA PROSES
 BAB III DINAMIKA PROSES Tujuan Pembelajaran Umum: Setelah membaca bab ini diharapkan mahasiswa dapat memahami Dinamika Proses dalam Sistem Kendali. Tujuan Pembelajaran Khusus: Setelah mengikuti kuiah ini
BAB III DINAMIKA PROSES Tujuan Pembelajaran Umum: Setelah membaca bab ini diharapkan mahasiswa dapat memahami Dinamika Proses dalam Sistem Kendali. Tujuan Pembelajaran Khusus: Setelah mengikuti kuiah ini
PERANCANGAN SISTEM KENDALI BERJARINGAN MENGGUNAKAN METODE DECOUPLING DAN KONTROLER STATE FEEDBACK UNTUK SISTEM MIMO PADA BOILER PLANT SIMULATOR
 PERANCANGAN SISTEM KENDALI BERJARINGAN MENGGUNAKAN METODE DECOUPLING DAN KONTROLER STATE FEEDBACK UNTUK SISTEM MIMO PADA BOILER PLANT SIMULATOR Dian Samto Bagus Pramana, Rusdhianto Effendie A.K, Joko Susila
PERANCANGAN SISTEM KENDALI BERJARINGAN MENGGUNAKAN METODE DECOUPLING DAN KONTROLER STATE FEEDBACK UNTUK SISTEM MIMO PADA BOILER PLANT SIMULATOR Dian Samto Bagus Pramana, Rusdhianto Effendie A.K, Joko Susila
KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO
 KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO Jalan MT Haryono 167 Telp & Fax. 031 55166 Malang 6515 KODE PJ-01 PENGESAHAN PUBLIKASI HASIL PENELITIAN
KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO Jalan MT Haryono 167 Telp & Fax. 031 55166 Malang 6515 KODE PJ-01 PENGESAHAN PUBLIKASI HASIL PENELITIAN
Studi Aplikasi Decoupling Control untuk Pengendalian Komposisi Kolom Distilasi
 Studi Aplikasi Decoupling Control untuk Pengendalian Komposisi Kolom Distilasi Lindawati, Agnes Soelistya, Rudy Agustriyanto Jurusan Teknik Kimia, Fakultas Teknik Universitas Surabaya Jl.Raya Kalirungkut,
Studi Aplikasi Decoupling Control untuk Pengendalian Komposisi Kolom Distilasi Lindawati, Agnes Soelistya, Rudy Agustriyanto Jurusan Teknik Kimia, Fakultas Teknik Universitas Surabaya Jl.Raya Kalirungkut,
Perancangan dan Simulasi MRAC PID Control untuk Proses Pengendalian Temperatur pada Continuous Stirred Tank Reactor (CSTR)
") JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: 2337-3539 (2301-9271 Print) A-128 Perancangan dan Simulasi MRAC PID Control untuk Proses Pengendalian Temperatur pada Continuous Stirred Tank Reactor (CSTR)
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: 2337-3539 (2301-9271 Print) A-128 Perancangan dan Simulasi MRAC PID Control untuk Proses Pengendalian Temperatur pada Continuous Stirred Tank Reactor (CSTR)
Pengaturan Kecepatan Motor DC Melalui Jaringan dengan Metode Adaptif
 Pengaturan Kecepatan Motor DC Melalui Jaringan dengan Metode Adaptif Prosiding Seminar Nasional Pascasarjana VII 27 Singgih Wijaya Anggono dan Josaphat Pramudijanto Jurusan Teknik Elektro Institut Teknologi
Pengaturan Kecepatan Motor DC Melalui Jaringan dengan Metode Adaptif Prosiding Seminar Nasional Pascasarjana VII 27 Singgih Wijaya Anggono dan Josaphat Pramudijanto Jurusan Teknik Elektro Institut Teknologi
DESAIN PENGENDALIAN KETINGGIAN AIR DAN TEMPERATUR UAP PADA SISTEM STEAM DRUM BOILER DENGAN METODE SLIDING MODE CONTROL (SMC)
") DESAIN PENGENDALIAN KETINGGIAN AIR DAN TEMPERATUR UAP PADA SISTEM STEAM DRUM BOILER DENGAN METODE SLIDING MODE CONTROL (SMC) OLEH : Teguh Herlambang (1206 100 046) DOSEN PEMBIMBING: Dr. Erna Apriliani,
DESAIN PENGENDALIAN KETINGGIAN AIR DAN TEMPERATUR UAP PADA SISTEM STEAM DRUM BOILER DENGAN METODE SLIDING MODE CONTROL (SMC) OLEH : Teguh Herlambang (1206 100 046) DOSEN PEMBIMBING: Dr. Erna Apriliani,
Pemodelan Kolom Distilasi Pabrik Petrokimia dengan Menggunakan Distributed Control System
 Abstrak Pemodelan Kolom Distilasi Pabrik Petrokimia dengan Menggunakan Distributed Control System Hafid S.N. Muzwar, Atindriyo K. Pamososuryo, dan Estiyanti Ekawati Teknik Fisika, Fakultas Teknologi Industri,
Abstrak Pemodelan Kolom Distilasi Pabrik Petrokimia dengan Menggunakan Distributed Control System Hafid S.N. Muzwar, Atindriyo K. Pamososuryo, dan Estiyanti Ekawati Teknik Fisika, Fakultas Teknologi Industri,
Desain dan Implementasi Kontroler PID Gain Scheduling untuk Sistem Pengaturan Proses Level pada Process Control Technology - 100
 1 Desain dan Kontroler PID Gain Scheduling untuk Sistem Pengaturan Proses Level pada Process Control Technology - 1 Rachmad Dwi Raharjo, Joko Susila, Imam Arifin Teknik Elektro, Fakultas Teknologi Industri,
1 Desain dan Kontroler PID Gain Scheduling untuk Sistem Pengaturan Proses Level pada Process Control Technology - 1 Rachmad Dwi Raharjo, Joko Susila, Imam Arifin Teknik Elektro, Fakultas Teknologi Industri,
DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID BERBASIS PLC PADA SISTEM KONTROL LEVEL CAIRAN COUPLED-TANK
 TUGAS AKHIR TE091399 Teknik Sistem Pengaturan Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013 DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID
TUGAS AKHIR TE091399 Teknik Sistem Pengaturan Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013 DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1. Dinamika Proses Dinamika Proses adalah suatu hal yang terjadi di dalam suatu sistem, dengan adanya process variable yang cepat berubah dengan berubahnya manipulated variable
BAB II TINJAUAN PUSTAKA 2.1. Dinamika Proses Dinamika Proses adalah suatu hal yang terjadi di dalam suatu sistem, dengan adanya process variable yang cepat berubah dengan berubahnya manipulated variable
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: ( Print) 1
 ISSN: ( Print) 1") JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) 1 Model Based Controller Dengan Menggunakan Internal Model Control (IMC) Yang Ditunning Berdasarkan Perubahan Set Point dan
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) 1 Model Based Controller Dengan Menggunakan Internal Model Control (IMC) Yang Ditunning Berdasarkan Perubahan Set Point dan
Pertemuan ke-14 Pengontrolan l var iabel ll l ana og menggunakan PLC: Algoritma PID
 Pertemuan ke-14 Pengontrolan variabel analog menggunakan PLC: Algoritma PID Garis Besar & Tujuan Sesi Memahami apa itu kontrol PID Mengetahui fungsi dari setiap istilah kontrol PID Bisa memilih kombinasi
Pertemuan ke-14 Pengontrolan variabel analog menggunakan PLC: Algoritma PID Garis Besar & Tujuan Sesi Memahami apa itu kontrol PID Mengetahui fungsi dari setiap istilah kontrol PID Bisa memilih kombinasi
PERANCANGAN SISTEM KENDALI BOILER MENGGUNAKAN ALGORITMA PID PADA PLC (PROGRAMMABLE LOGIC CONTROLLER) OMRON
 OMRON") PERANCANGAN SISTEM KENDALI BOILER MENGGUNAKAN ALGORITMA PID PADA PLC (PROGRAMMABLE LOGIC CONTROLLER) OMRON DESIGN CONTROL SYSTEM BOILER USING PID ALGORITHM ON PLC (PROGRAMMABLE LOGIC CONTROLLER) OMRON
PERANCANGAN SISTEM KENDALI BOILER MENGGUNAKAN ALGORITMA PID PADA PLC (PROGRAMMABLE LOGIC CONTROLLER) OMRON DESIGN CONTROL SYSTEM BOILER USING PID ALGORITHM ON PLC (PROGRAMMABLE LOGIC CONTROLLER) OMRON
SISTEM PENGONTROLAN TEKANAN UDARA PADA RUANG TERTUTUP
 SISTEM PENGONTROLAN TEKANAN UDARA PADA RUANG TERTUTUP Ayuta Anindyaningrum #, Sumardi,ST,MT #, Budi Setiyono,ST,MT #3 # Jurusan Teknik Elektro, Fakultas Teknik Universitas Diponegoro jl. Prof Sudharto,
SISTEM PENGONTROLAN TEKANAN UDARA PADA RUANG TERTUTUP Ayuta Anindyaningrum #, Sumardi,ST,MT #, Budi Setiyono,ST,MT #3 # Jurusan Teknik Elektro, Fakultas Teknik Universitas Diponegoro jl. Prof Sudharto,
SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID
 SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID Raditya Wiradhana, Pembimbing 1: M. Aziz Muslim, Pembimbing 2: Purwanto. 1 Abstrak Pada saat ini masih banyak tungku bakar berbahan
SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID Raditya Wiradhana, Pembimbing 1: M. Aziz Muslim, Pembimbing 2: Purwanto. 1 Abstrak Pada saat ini masih banyak tungku bakar berbahan
PENGENDALIAN KOLOM DISTILASI PADA HYSYS MENGGUNAKAN ROBUST IMC PADA MATLAB DENGAN HMI PADA APLIKASI PEMROGRAMAN VISUAL BASIC TUGAS AKHIR RF1483
 TUGAS AKHIR RF1483 PENGENDALIAN KOLOM DISTILASI PADA HYSYS MENGGUNAKAN ROBUST IMC PADA MATLAB DENGAN HMI PADA APLIKASI PEMROGRAMAN VISUAL BASIC IBNU DWI ARYANTO NRP 2402 100 037 Dosen Pembimbing Totok
TUGAS AKHIR RF1483 PENGENDALIAN KOLOM DISTILASI PADA HYSYS MENGGUNAKAN ROBUST IMC PADA MATLAB DENGAN HMI PADA APLIKASI PEMROGRAMAN VISUAL BASIC IBNU DWI ARYANTO NRP 2402 100 037 Dosen Pembimbing Totok
Gambar 2. front panel dan block diagram
 MODUL 2 : Simulasi Pengendalian Laju Aliran Air (Flow) Dengan LABVIEW 2012 I. Tujuan: 1. Praktikan dapat mengetahui konfigurasi hardware Labview DAQ 6009 yang digunakan untuk mengendalikan besarnya Laju
MODUL 2 : Simulasi Pengendalian Laju Aliran Air (Flow) Dengan LABVIEW 2012 I. Tujuan: 1. Praktikan dapat mengetahui konfigurasi hardware Labview DAQ 6009 yang digunakan untuk mengendalikan besarnya Laju
PERANCANGAN SISTEM KONTROL DAN SAFETY YANG TERINTEGRASI PADA STEAM SEPARATOR
 1 PERANCANGAN SISTEM KONTROL DAN SAFETY YANG TERINTEGRASI PADA STEAM SEPARATOR MENGGUNAKAN METODE FUZZY-PID DI PT PERTAMINA GEOTHERMAL ENERGY KAMOJANG, JAWA BARAT Arief Rakhman, dan Dr. Bambang L. Widjiantoro
1 PERANCANGAN SISTEM KONTROL DAN SAFETY YANG TERINTEGRASI PADA STEAM SEPARATOR MENGGUNAKAN METODE FUZZY-PID DI PT PERTAMINA GEOTHERMAL ENERGY KAMOJANG, JAWA BARAT Arief Rakhman, dan Dr. Bambang L. Widjiantoro
RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC
 RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC Dwiana Hendrawati Prodi Teknik Konversi Energi Jurusan Teknik Mesin Politeknik Negeri Semarang Jl. Prof. H. Sudarto, SH.,
RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC Dwiana Hendrawati Prodi Teknik Konversi Energi Jurusan Teknik Mesin Politeknik Negeri Semarang Jl. Prof. H. Sudarto, SH.,
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) 1-5 1
 1-5 1") JURNAL TEKNIK POMITS Vol. 1, No. 1, (13) 1-5 1 Rancang Bangun Auto Switch PID pada Sistem ILFM (In Line Flash Mixing) untuk Proses Netralisasi Hariadi kurniawan 1), Hendra Cordova S.T., M.T. 1) Jurusan
JURNAL TEKNIK POMITS Vol. 1, No. 1, (13) 1-5 1 Rancang Bangun Auto Switch PID pada Sistem ILFM (In Line Flash Mixing) untuk Proses Netralisasi Hariadi kurniawan 1), Hendra Cordova S.T., M.T. 1) Jurusan
SISTEM BOILER DENGAN SIMULASI PEMODELAN PID
 SISTEM BOILER DENGAN SIMULASI PEMODELAN PID Wisnu Broto *), Ane Prasetyowati R. **) Prodi Elektro Fakultas Teknik Univ. Pancasila, Srengseng Sawah Jagakarsa, Jakarta, 12640 Email: *) wisnu.agni@gmail.com
SISTEM BOILER DENGAN SIMULASI PEMODELAN PID Wisnu Broto *), Ane Prasetyowati R. **) Prodi Elektro Fakultas Teknik Univ. Pancasila, Srengseng Sawah Jagakarsa, Jakarta, 12640 Email: *) wisnu.agni@gmail.com
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN A. Metode Penelitian Metode yang digunakan oleh penyusun dalam melakukan penelitian skripsi ini antara lain: 1. Studi Pustaka, yaitu dengan cara mencari, menggali dan mengkaji
BAB III METODE PENELITIAN A. Metode Penelitian Metode yang digunakan oleh penyusun dalam melakukan penelitian skripsi ini antara lain: 1. Studi Pustaka, yaitu dengan cara mencari, menggali dan mengkaji
Presentasi Tugas Akhir Bidang Studi Teknik Sistem Pengaturan Jurusan Teknik Elektro - ITS
 Presentasi Tugas Akhir Bidang Studi Teknik Sistem Pengaturan Jurusan Teknik Elektro - ITS INTEGRASI PLC SIEMENS S7 Lite300DAN DCS CENTUM CS 3000 UNTUK IMPLEMENTASI PENGATURAN CONTROL VALVE Samsul Rajab
Presentasi Tugas Akhir Bidang Studi Teknik Sistem Pengaturan Jurusan Teknik Elektro - ITS INTEGRASI PLC SIEMENS S7 Lite300DAN DCS CENTUM CS 3000 UNTUK IMPLEMENTASI PENGATURAN CONTROL VALVE Samsul Rajab
Perancangan Sistem Kontrol Posisi Miniatur Plant Crane dengan Kontrol PID Menggunakan PLC
 88 ISSN 1979-2867 (print) Electrical Engineering Journal Vol. 5 (215) No. 2, pp. 88-17 Perancangan Sistem Kontrol Posisi Miniatur Plant Crane dengan Kontrol PID Menggunakan PLC E. Merry Sartika dan Hardi
88 ISSN 1979-2867 (print) Electrical Engineering Journal Vol. 5 (215) No. 2, pp. 88-17 Perancangan Sistem Kontrol Posisi Miniatur Plant Crane dengan Kontrol PID Menggunakan PLC E. Merry Sartika dan Hardi
Pembuatan Operator Training Simulator Proses Sintesis Pabrik Urea Menggunakan Fasilitas Function Block Pada Distributed Control System
 Pembuatan Operator Training Simulator Proses Sintesis Pabrik Urea Menggunakan Fasilitas Function Block Pada Distributed Control System Abstrak Adjie Ridhonmas, Estiyanti Ekawati, dan Agus Samsi Program
Pembuatan Operator Training Simulator Proses Sintesis Pabrik Urea Menggunakan Fasilitas Function Block Pada Distributed Control System Abstrak Adjie Ridhonmas, Estiyanti Ekawati, dan Agus Samsi Program
PERANCANGAN SISTEM PENGENDALIAN TEMPERATURE PADA REBOILER METANOL RECOVERY MENGGUNAKAN FUZZY GAIN SCHEDULING-PID DI PT. ETERINDO NUSA GRAHA GRESIK
 PERANCANGAN SISTEM PENGENDALIAN TEMPERATURE PADA REBOILER METANOL RECOVERY MENGGUNAKAN FUZZY GAIN SCHEDULING-PID DI PT. ETERINDO NUSA GRAHA GRESIK (Agus Handrian F, Syamsul Arifin, Roekmono) Jurusan Teknik
PERANCANGAN SISTEM PENGENDALIAN TEMPERATURE PADA REBOILER METANOL RECOVERY MENGGUNAKAN FUZZY GAIN SCHEDULING-PID DI PT. ETERINDO NUSA GRAHA GRESIK (Agus Handrian F, Syamsul Arifin, Roekmono) Jurusan Teknik
Perancangan dan Simulasi Autotuning PID Controller Menggunakan Metoda Relay Feedback pada PLC Modicon M340. Renzy Richie /
 Perancangan dan Simulasi Autotuning PID Controller Menggunakan Metoda Relay Feedback pada PLC Modicon M340 Renzy Richie / 0622049 Email : renzyrichie@live.com Jurusan Teknik Elektro, Fakultas Teknik, Universitas
Perancangan dan Simulasi Autotuning PID Controller Menggunakan Metoda Relay Feedback pada PLC Modicon M340 Renzy Richie / 0622049 Email : renzyrichie@live.com Jurusan Teknik Elektro, Fakultas Teknik, Universitas
Materi 9: Fuzzy Controller
 Materi 9: Fuzzy Controller I Nyoman Kusuma Wardana Sistem Komputer STMIK STIKOM Bali Introduction to Fuzzy Logic Kusuma Wardana, M.Sc. 2 Logika Fuzzy dapat diterapkan sebagai algoritma dalam sistem kontrol
Materi 9: Fuzzy Controller I Nyoman Kusuma Wardana Sistem Komputer STMIK STIKOM Bali Introduction to Fuzzy Logic Kusuma Wardana, M.Sc. 2 Logika Fuzzy dapat diterapkan sebagai algoritma dalam sistem kontrol
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT)
") DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
Adaptive Fuzzy Untuk Menala Parameter PID pada Sistem Pengaturan Berjaringan. Nastiti Puspitosari L/O/G/O NETWORKED CONTROL SYSTEM (NCS)
") L/O/G/O NETWORKED CONTROL SYSTEM (NCS) Adaptive Fuzzy Untuk Menala Parameter PID pada Sistem Pengaturan Berjaringan Nastiti Puspitosari 2208100039 BIDANG STUDI TEKNIK SISTEM PENGATURAN - ITS TOPIK PEMBAHASAN
L/O/G/O NETWORKED CONTROL SYSTEM (NCS) Adaptive Fuzzy Untuk Menala Parameter PID pada Sistem Pengaturan Berjaringan Nastiti Puspitosari 2208100039 BIDANG STUDI TEKNIK SISTEM PENGATURAN - ITS TOPIK PEMBAHASAN
LAPORAN PRAKTIKUM SISTEM KONTROL TERDISTRIBUSI
 LAPORAN PRAKTIKUM SISTEM KONTROL TERDISTRIBUSI DCS Yokogawa CS3000 Department Poly CP3 PT. Indorama Synthetics Tanggal 27-30 Oktober 2015 Disusun Oleh : Fahmi Ahmad Husaeni (201302025) Dosen Pengampu :
LAPORAN PRAKTIKUM SISTEM KONTROL TERDISTRIBUSI DCS Yokogawa CS3000 Department Poly CP3 PT. Indorama Synthetics Tanggal 27-30 Oktober 2015 Disusun Oleh : Fahmi Ahmad Husaeni (201302025) Dosen Pengampu :
Rancang Bangun Modul Praktikum Teknik Kendali dengan Studi Kasus pada Indentifikasi Sistem Motor-DC berbasis Arduino-Simulink Matlab
 Rancang Bangun Modul Praktikum Teknik Kendali dengan Studi Kasus pada Indentifikasi Sistem Motor-DC berbasis Arduino-Simulink Matlab Fahmizal, Nur Sulistyawati, Muhammad Arrofiq Departemen Teknik Elektro
Rancang Bangun Modul Praktikum Teknik Kendali dengan Studi Kasus pada Indentifikasi Sistem Motor-DC berbasis Arduino-Simulink Matlab Fahmizal, Nur Sulistyawati, Muhammad Arrofiq Departemen Teknik Elektro
KONTROL CASCADE GENERALIZED PREDICTIVE UNTUK BOILER DRUM LEVEL BY ASTRIATONO ( )
") KONTROL CASCADE GENERALIZED PREDICTIVE UNTUK BOILER DRUM LEVEL BY ASTRIATONO (2210105028) PERMASALAHAN PERUBAHAN JUDUL Pergantian judul hanya mengubah metode kontrol yang digunakan dikarenakan plant boiler
KONTROL CASCADE GENERALIZED PREDICTIVE UNTUK BOILER DRUM LEVEL BY ASTRIATONO (2210105028) PERMASALAHAN PERUBAHAN JUDUL Pergantian judul hanya mengubah metode kontrol yang digunakan dikarenakan plant boiler
Perancangan Sistem Kontrol PID Untuk Pengendali Sumbu Azimuth Turret Pada Turret-gun Kaliber 20mm
 A512 Perancangan Sistem Kontrol PID Untuk Pengendali Sumbu Azimuth Turret Pada Turret-gun Kaliber 20mm Danu Wisnu, Arif Wahjudi, dan Hendro Nurhadi Jurusan Teknik Mesin, Fakultas Teknik Industri, Institut
A512 Perancangan Sistem Kontrol PID Untuk Pengendali Sumbu Azimuth Turret Pada Turret-gun Kaliber 20mm Danu Wisnu, Arif Wahjudi, dan Hendro Nurhadi Jurusan Teknik Mesin, Fakultas Teknik Industri, Institut
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Sistem Pengendalian Secara umum sistem pengendalian adalah susunan komponenkomponen fisik yang dirakit sedemikian rupa sehingga mampu mengatur sistemnya sendiri atau sistem
BAB II TINJAUAN PUSTAKA 2.1 Sistem Pengendalian Secara umum sistem pengendalian adalah susunan komponenkomponen fisik yang dirakit sedemikian rupa sehingga mampu mengatur sistemnya sendiri atau sistem
OTOMASI SISTEM DESTILASI MENGGUNAKAN PLC OMRON CP1H DAN KONTROL SUHU DENGAN KENDALI AUTO TUNING PID DALAM PENAMPIL SCADA
 Youngster Physics Journal ISSN : 2302-7371 Vol. 4, No. 4, Oktober 2015, Hal 311-316 OTOMASI SISTEM DESTILASI MENGGUNAKAN PLC OMRON CP1H DAN KONTROL SUHU DENGAN KENDALI AUTO TUNING PID DALAM PENAMPIL SCADA
Youngster Physics Journal ISSN : 2302-7371 Vol. 4, No. 4, Oktober 2015, Hal 311-316 OTOMASI SISTEM DESTILASI MENGGUNAKAN PLC OMRON CP1H DAN KONTROL SUHU DENGAN KENDALI AUTO TUNING PID DALAM PENAMPIL SCADA
INTRGRASI SISTEM KONTROL DAN SAFETY PADA LAJU PIPA BAHAN BAKAR BOILER BERBASIS STATE FLOW DIAGRAM. Arufiko Septanto, Hendra Cordova
 INRGRASI SISEM KONROL DAN SAFEY PADA LAJU PIPA BAHAN BAKAR BOILER BERBASIS SAE FLOW DIAGRAM Arufiko Septanto, Hendra Cordova Jurusan eknik Fisika Fakultas eknologi Industri Institut eknologi Sepuluh Nopember
INRGRASI SISEM KONROL DAN SAFEY PADA LAJU PIPA BAHAN BAKAR BOILER BERBASIS SAE FLOW DIAGRAM Arufiko Septanto, Hendra Cordova Jurusan eknik Fisika Fakultas eknologi Industri Institut eknologi Sepuluh Nopember
SISTEM PENGATURAN BERJARINGAN : DESAIN DAN IMPLEMENTASI SLIDING MODE CONTROL PADA PRESSURE PROCESS RIG
 SISTEM PENGATURAN BERJARINGAN : DESAIN DAN IMPLEMENTASI SLIDING MODE CONTROL PADA PRESSURE PROCESS RIG 8-7 Chandra Choirulyanto 050006 Jurusan Teknik Elektro ITS, Surabaya 60, e-mail : Chandrachoirulyanto@gmailcom
SISTEM PENGATURAN BERJARINGAN : DESAIN DAN IMPLEMENTASI SLIDING MODE CONTROL PADA PRESSURE PROCESS RIG 8-7 Chandra Choirulyanto 050006 Jurusan Teknik Elektro ITS, Surabaya 60, e-mail : Chandrachoirulyanto@gmailcom
SIMULASI KONTROL PID UNTUK MENGATUR PUTARAN MOTOR AC
 F.5 SIMULASI KONTROL PID UNTUK MENGATUR PUTARAN MOTOR AC M. Subchan Mauludin *, Rony Wijanarko, Nugroho Eko Budiyanto Jurusan Teknik Informatika, Fakultas Teknik, Universitas Wahid Hasyim Jl. Menoreh Tengah
F.5 SIMULASI KONTROL PID UNTUK MENGATUR PUTARAN MOTOR AC M. Subchan Mauludin *, Rony Wijanarko, Nugroho Eko Budiyanto Jurusan Teknik Informatika, Fakultas Teknik, Universitas Wahid Hasyim Jl. Menoreh Tengah
PERANCANGAN SISTEM PENGENDALIAN LEVEL BERBASIS MODEL REFERENCE ADAPTIVE CONTROL (MRAC) PADA SEPARATOR PT.PETROKIMIA GRESIK
 PADA SEPARATOR PT.PETROKIMIA GRESIK") Halaman Judul TUGAS AKHIR - TF 141581 PERANCANGAN SISTEM PENGENDALIAN LEVEL BERBASIS MODEL REFERENCE ADAPTIVE CONTROL (MRAC) PADA SEPARATOR PT.PETROKIMIA GRESIK IRA NUR WIDIYANTI NRP 2413 100 021 Dosen
Halaman Judul TUGAS AKHIR - TF 141581 PERANCANGAN SISTEM PENGENDALIAN LEVEL BERBASIS MODEL REFERENCE ADAPTIVE CONTROL (MRAC) PADA SEPARATOR PT.PETROKIMIA GRESIK IRA NUR WIDIYANTI NRP 2413 100 021 Dosen
PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC
 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Dwitama Aryana Surya Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Sukolilo,
PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Dwitama Aryana Surya Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Sukolilo,
Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy
 ABSTRAK Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
ABSTRAK Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK
 PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK Oleh : AHMAD ADHIM 2107100703 Dosen Pembimbing : Hendro Nurhadi, Dipl.-Ing., Ph.D. PENDAHULUAN LATAR BELAKANG Kebanyakan
PERANCANGAN SISTEM KENDALI SLIDING-PID UNTUK PENDULUM GANDA PADA KERETA BERGERAK Oleh : AHMAD ADHIM 2107100703 Dosen Pembimbing : Hendro Nurhadi, Dipl.-Ing., Ph.D. PENDAHULUAN LATAR BELAKANG Kebanyakan
APLIKASI SISTEM KONTROL DCS
 APLIKASI SISTEM KONTROL DCS Disampaikan oleh: ADI PUTRANTO UPTD BALAI LATIHAN KERJA (BLK) DEMAK - JAWA TENGAH Presentation Objective Pengertian DCS Fungsi Utama DCS Konstruksi DCS Hardware DCS Sistem Kerja
APLIKASI SISTEM KONTROL DCS Disampaikan oleh: ADI PUTRANTO UPTD BALAI LATIHAN KERJA (BLK) DEMAK - JAWA TENGAH Presentation Objective Pengertian DCS Fungsi Utama DCS Konstruksi DCS Hardware DCS Sistem Kerja
BAB III PERANCANGAN DAN PEMBUATAN SISTEM
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software maupun hardware yang digunakan untuk mendukung keseluruhan sistem
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software maupun hardware yang digunakan untuk mendukung keseluruhan sistem
TUGAS AKHIR - TE
 TUGAS AKHIR - TE 091399 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID UNTUK PENGATURAN ARAH DAN PENGATURAN HEADING PADA FIXED-WING UAV (UNMANNED AERIAL VEHICLE) Hery Setyo Widodo NRP. 2208100176 Laboratorium
TUGAS AKHIR - TE 091399 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID UNTUK PENGATURAN ARAH DAN PENGATURAN HEADING PADA FIXED-WING UAV (UNMANNED AERIAL VEHICLE) Hery Setyo Widodo NRP. 2208100176 Laboratorium
BAB I PENDAHULUAN. Dalam proses PLTU dibutuhkan fresh water yang di dapat dari proses
 BAB I PENDAHULUAN 1.1. Latar Belakang Pada Pembangkit Listrik Tenaga Uap, untuk menghasilkan uap dibutuhkan air yang dipanaskan secara bertahap melalui beberapa heater sebelum masuk ke boiler untuk dipanaskan
BAB I PENDAHULUAN 1.1. Latar Belakang Pada Pembangkit Listrik Tenaga Uap, untuk menghasilkan uap dibutuhkan air yang dipanaskan secara bertahap melalui beberapa heater sebelum masuk ke boiler untuk dipanaskan
PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN JARINGAN SARAF TIRUAN PREDIKTIF
 PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN JARINGAN SARAF TIRUAN PREDIKTIF Rr.rahmawati Putri Ekasari, Rusdhianto Effendi AK., Eka Iskandar Jurusan Teknik Elektro, Fakultas Teknologi
PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN JARINGAN SARAF TIRUAN PREDIKTIF Rr.rahmawati Putri Ekasari, Rusdhianto Effendi AK., Eka Iskandar Jurusan Teknik Elektro, Fakultas Teknologi
BAB III PERANCANGAN DAN PEMBUATAN SISTEM. Gambar 3. 1 Diagram Blok Sistem Kecepatan Motor DC
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Laju ALir Fluida Fluida adalah suatu zat yang bisa mengalami perubahan-perubahan bentuknya secara continue/terus-menerus bila terkena tekanan/gaya geser walaupun relatif kecil
BAB II TINJAUAN PUSTAKA 2.1 Laju ALir Fluida Fluida adalah suatu zat yang bisa mengalami perubahan-perubahan bentuknya secara continue/terus-menerus bila terkena tekanan/gaya geser walaupun relatif kecil
Rancang Bangun Auto Switch PID pada Sistem ILFM (In Line Flash Mixing) untuk Proses Netralisasi ph
 untuk Proses Netralisasi ph") JURNAL TEKNIK POMITS Vol., No., (13) ISSN: 337-3539 (31-971 Print) F-1 Rancang Bangun Auto Switch PID pada Sistem ILFM (In Line Flash Mixing) untuk Proses Netralisasi Hariadi Kurniawan dan Hendra Cordova
JURNAL TEKNIK POMITS Vol., No., (13) ISSN: 337-3539 (31-971 Print) F-1 Rancang Bangun Auto Switch PID pada Sistem ILFM (In Line Flash Mixing) untuk Proses Netralisasi Hariadi Kurniawan dan Hendra Cordova
Syahrir Abdussamad, Simulasi Kendalian Flow Control Unit G.U.N.T Tipe 020 dengan Pengendali PID
 Syahrir Abdussamad, Simulasi Kendalian Control Unit G.U.N.T Tipe dengan Pengendali PID MEDIA ELEKTRIK, Volume 4 Nomor, Juni 9 SIMULASI KENDALIAN FLOW CONTROL UNIT G.U.N.T TIPE DENGAN PENGENDALI PID Syahrir
Syahrir Abdussamad, Simulasi Kendalian Control Unit G.U.N.T Tipe dengan Pengendali PID MEDIA ELEKTRIK, Volume 4 Nomor, Juni 9 SIMULASI KENDALIAN FLOW CONTROL UNIT G.U.N.T TIPE DENGAN PENGENDALI PID Syahrir