MENGENAL DIRECT READING ACOUSTIC DOPPLER CURRENT PROFILER. oleh. Edikusmanto, Bonita N. Ersan, Dharma Arief 1 )
|
|
|
- Glenna Tedja
- 6 tahun lalu
- Tontonan:
Transkripsi
1 Oseana, Volume XXI, Nomor 3, 1996 : 1-11 ISSN MENGENAL DIRECT READING ACOUSTIC DOPPLER CURRENT PROFILER oleh Edikusmanto, Bonita N. Ersan, Dharma Arief 1 ) ABSTRACT INTRODUCTION TO DIRECT READING ACOUSTIC DOPPLER CUR- RENT PROFILER. Direct Reading Acoustic Doppler Current Profiler (DR-ADCP) is high technology instrument to measure currents. The DR-ADCP uses sonar and applies Doppler Effect to estimate magnitude and direction of water movement at the maximum of 128 equally space layer vertically in the water temperature at instrument depth, the observation track, and the water depth. The most advantage of DR-ADCP over conventional currentmeter is its capability to measure both lateral and vertical current component at short time inteval, about each 3 seconds at water depth of 30-35m. In addition, the observed informations is displayed in real time during the measurement. The principle of DR-ADCP, comparison with conventional currentmeter, operational procedure, and the observation results are discussed. PENDAHULUAN Alat ukur "Acoustic Doppier Current Profiler", yang dikenal dengan ADCP, merupakan salah satu alat pengukur kecepatan arus air berteknologi tinggi. ADCP menggunakan gelombang suara (sonar) sebagai alat pendeteksinya dan mempunyai akurasi yang tinggi. Informasi yang diukur oleh alat tersebut adalah meliputi besar dan arah arus air hingga 128 titik di kolom air dengan maksimum kedalaman pengukuran mencapai beberapa ratus meter, tergantung pada frekwensi suara yang digunakannya. Selain itu, alat inipun memberikan informasi mengenai suhu air laut, lintasan kapal, topografi dasar perairan serta dapat dihubungkan dengan Global Positioning System (GPS) untuk penentuan posisi pengukuran. Ada tiga konfigurasi ADCP yang diproduksi RD Instruments (RD Instruments, 1995), yaitu : 1. Direct-reading ADCP (RD-ADCP) : dioperasikan dari kapal / perahu dan dihubungkan langsung ke komputer sehingga hasil pengukuran dapat diamati secara langsung; 1 ) Balai Penelitian dan Pengembangan Oseanografi, Pusat Penelitian dan Pengembangan Oseanologi - LIPI, Jakarta 1
2 2. Hull-mounted ADCP : terpasang permanen di kapal. Pengoperasiannya seperti halnya Direct-reading ADCP. 3. Mooring ADCP : dimaksudkan untuk pengukuran arus pada suatu titik tetap pada jangka waktu tertentu. Hasil pengukuran direkam pada memory di alat tersebut. Selanjutnya, pembahasan dititikberatkan pada konfigurasi Direct-reading ADCP. Tipe ADCP ini telah dioperasikan oleh Puslitbang Oseanografi sejak tahun 1995, dan merupakan alat pertama di Indonesia. Pada prinsipnya, ADCP bekerja dengan mentransmisikan gelombang suara dengan pola tertentu ke kolom air dan menerima pantulannya yang disebabkan oleh partikel-partikel yang ada di dalam air. Informasi tersebut dianalisa berdasarkan pergeseran frekwensi menurut teori Doppler. Teori Doppler menjelaskan mengenai perubahan frekwensi gelombang yang berasal atau dipantulkan oleh objek yang bergerak. Jikalau objek bergerak mendekati. maka gelombang suara tersebut akan makin tinggi frekuensinya dibandingkan dengan frekuensi asalnya. Jikalau objeknya menjauhi, frekuensi gelombang yang diterima menjadi lebih rendah. Besarnya perbedaan frekuensi tersebut sebanding dengan kecepatan relatif antara ADCP dan partikel. Besarnya perbedaan nilai tersebut kemudian dikonversikan ke dalam bentuk komponen kecepatan arus. Oleh karena itu, sesungguhnya yang diukur oleh ADCP adalah kecepatan partikelpartikel di dalam air. Oleh karena sifat gerak karakter tersebut mengikuti gerakan air, kecepatan gerak partikel tersebut juga merupakan kecepatan gerak air. Besarnya kecepatan gerakan air yang diukur oleh currentmeter' konvensional diturunkan dari tenaga dorong air untuk menggerakan baling-balingnya. Perbedaan mendasar lainnya antara ADCP dan currentmeter konvensional terletak pada kemampuan pengambilan data profil arus dari kolom air sampai kedalaman tertentu. Pengukuran yang dilakukan oleh satu ADCP setara dengan pengukuran 128 currentmeter konvensional yang dipasang secara bersamaan pada kolom air. Perbedaannya terletak pada nilai pengukuran yang terwakili. ADCP mengukur rata-rata arus di antara dua lapisan, sedangkan currentmeter konvensional mengukur lebih lengkap mengenai kondisi profil arus. Pada gam bar 1 memperlihatkan diagram perbedaan antara ADCP dengan 'currentmeter' konvensional. Kelebihan lain yang dimiliki ADCP atas currentmeter konvensional adalah kemampuannya untuk mengukur komponen arus vertikal. Currentmeter biasa hanya memberikan informasi komponen arus mendatar. Selain itu, ADCP mampu mengukur dengan selang waktu yang pendek. yaitu sekitar 3 detik pada kedalaman air 30-35m. Dengan kemampuan ini, data yang dihasilkan merupakan data dengan resolusi tinggi dalam dimensi ruang dan waktu. Alat ukur ADCP ini tidak dapat berfungsi pada air yang sangat jernih, yang tidak cukup mempunyai objek untuk memantulkan gelombang suara. Akan tetapi, kelemahan ini tidak menjadi kendala untuk pengukuran di laut, sungai atau danau karena air di dalam selalu mengandung partikel -partikel sedimen atau organisme yang memantulkan gelombang suara. Data yang dihasilkan dari suatu pengukuran yang intensif akan menjadi sangat besar. Tersedianya komputer dengan kapasitas hard-disk yang cukup besar menjadi salah satu kebutuhan. Penggunaan piranti lunak dari alat DR-ADCP, yaitu Transect (RD Instrument 1994), mencukupi untuk proses data sementara di lapangan, akan tetapi untuk 2
3 pengolahan data secara maksmimun, kemampuan personil dalam membuat program komputer merupakan salah satu hal penting. Hal ini dikarenakan jumlah data yang diperoleh tidak mungkin lagi dianalisa secara manual. SISTEM ADCP Sistem ADCP terdiri dua bagian yaitu profiler dan kontrol. Bagian profiler meliputi beberapa komponen, yaitu komponen tranducer, sensor suhu, kompas dan komponen elektronik pengolah sinyal. Bagian kontrol meliputi komponen catu-daya (power supply), komponen komunikasi elektronik, komputer dan peranti lunak untuk mengontrol kinerja ADCP dan pengolahan data. Pengoperasian ADCP selalu dibarengi dengan program komputer yang mengontrol profiler, perekaman data dan analisa data. Analisa data yang umum dilakukan sewaktu pengoperasian alat meliputi perata-rataan pengukuran untuk meningkatkan akurasi pengukuran. Penampilan data secara langsung di monitor komputer dalam bentuk grafik sangat membantu dalam pemahaman sistem arus yang diukur pada saat itu juga. PENGOPERASIAN ADCP ADCP selain dipasang sebagai mooring (tambatan) di permukaan atau di dasar laut, juga dapat dipasang di kapal secara permanen ataupun temporal untuk pengambilan data profil arus, tergantung pada konfigurasi alatnya. Tipe Direct-reading ADCP merupakan tipe yang tepat bagi pengukuran pola arus di suatu perairan terbatas, misalnya perairan Teluk Jakarta. Sarana yang diperlukan dalam pengoperasian DR-ADCP ini adalah sebuah perahu yang cukup stabil dan memadai untuk dibebani oleh DR-ADCP di salah satu sisinya. Berat sensor DR-ADCP sekitar 40 kg. DR-ADCP dipasang pada suatu kerangka aluminium sedemikian rupa sehingga sensornya terletak di dalam air dan posisinya tidak berubah sewaktu kapal bergerak. Pengoperasian DR- ADCP dapat dilakukan sambil perahu berjalan dengan kecepatan hingga 10 knot. Sumber tenaga listrik yang digunakan dalam pengoperasian DR-ADCP dapat berasal dari sebuah generator AC yang dilengkapi dengan Stabilizer. Stabilizer ini berfungsi untuk menstabilkan tegangan listrik dari generator sehingga operasional DR-ADCP dan komputer tidak terganggu. Selain generator, dapat pula digunakan baterai atau accu walaupun jenis sumber listrik ini mempunyai daya yang terbatas sehingga kurang tepat untuk suatu pengukuran yang cukup lama. PERENCANAAN DAN EVALUASI Perencanaan yang matang dalam mengoperasikan DR-ADCP merupakan suatu hal utama. Rencana perjalanan. perkiraan kondisi laut dan memilih konfigurasi parameter -parameter pengontrol operasi DR-ADCP yang paling optimal perlu dilakukan sebelum kegiatan dilakukan. Hal ini dimaksudkan untuk mendapatkan data secara optimal baik dalam segi kualitas maupun jumlahnya, yang sesuai dengan tujuan kerja. Disamping itu, selama kegiatan berlangsung hasil yang di dapat harus dievaluasi terus menerus berdasarkan penampilan data di komputer. Modifikasi setting DR-ADCP atau perubahan rencana pengukuran seringkali terpaksa dilakukan di lapangan akibat kondisi laut di luar perkiraan sebelumnya. Pertimbangan di atas harus dilakukan karena kinerja peralatan elektronik sangat dipengaruhi oleh kondisi lingkungan yang dapat berpengaruh pada akurasi dan 3
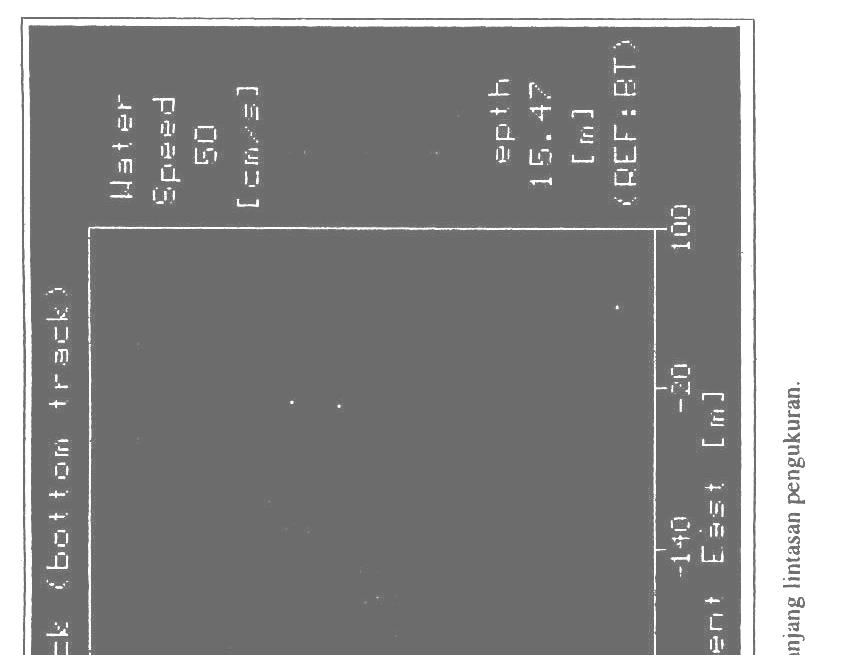
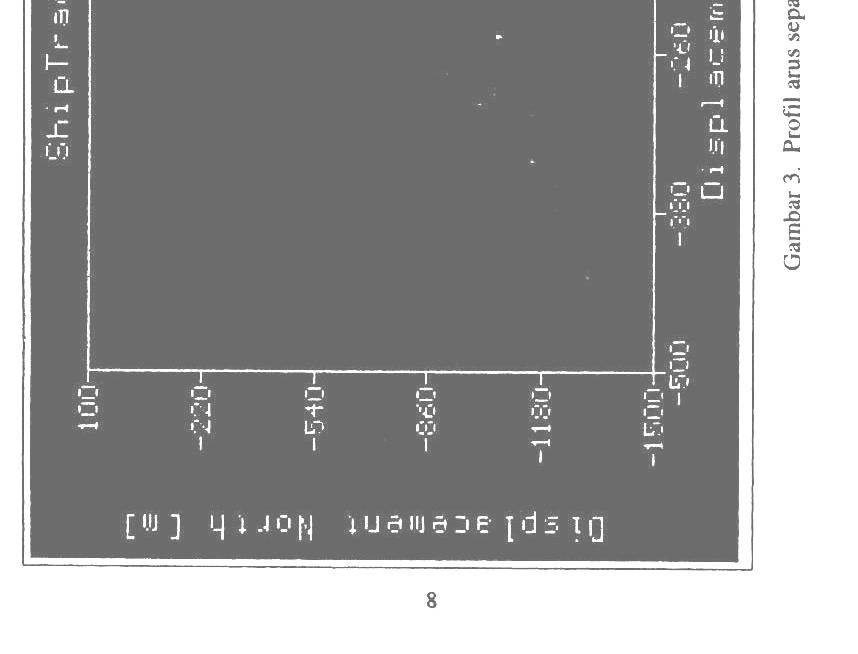
4 kemampuannya. Disamping itu, DR-ADCP merupakan alat yang sensitif dan mempunyai banyak hal yang dapat dikontrol untuk menyesuaikan operasional sesuai dengan kondisi yang dihadapi. Kualitas datanya sangat tergantung pada pemilihan kontrol operasional. PENGUJIAN DI LABORATORIUM Pengujian DR-ADCP di laboratorium bukan merupakan kalibrasi alat akan tetapi hanya merupakan pengecekan secara cermat dilingkungan laboratorium. Pengujian ini sangat disarankan sebelum DR-ADCP dioperasikan. pengujian ini meliputi pemeriksaan terhadap komunikasi antara transduser, deck elektronik dan komputer, memori DR-ADCP, spesifikasi (frekuensi, konfigurasi. sudut transduser. nomor sen, bentuk beam dll), dan sensor (orientasi, heading, pitch, roll, dan temperatur). kalibrasi alat DR-ADCP dan elektroniknya hingga saat ini hanya dapat dilakukan di pabrik pembuatnya. Aspek yang perlu diperhatikan sebelum mengoperasikan DR-ADCP antara lain frekuensi dan sudut yang dibentuk oleh tranduser terhadap posisi vertikal DR-ADCP. Setiap DR-ADCP mempunyai frekuensi tertentu. Frekuensi ini tetap untuk setiap tipe DR-ADCP, 300 KHz misalnya, hanya mampu mengukur arus sampai pada kedalaman 130 meter mulai pada kedalaman 4 meter (RD Instrument, 1995). Sudut yang dibentuk oleh tranduser bervariasi, 15, 20 atau 30 derajat. Sudut yang dibentuk oleh tranduser ini akan mempengaruhi akurasi DR-ADCP. Pemilihan konfigurasi yang tepat sesuai dengan kedalaman lokasi yang akan diteliti berdasarkan pada sudut yang dibentuk oleh tranduser dan frekuensi yang dimiliki oleh DR-ADCP akan diperoleh data dengan akurasi yang tinggi. Misalnya frekuensi DR-ADCP 300 KHz, sudut trandusernya 30 derajat maka data yang masih mempunyai akurasi tinggi maksimum pada kedalaman kolom air meter (RD Instrument, 1995). HASIL PENGUKURAN Berikut ini disajikan sejumlah hasil pengukuran yang dilakukan di perairan Teluk Jakarta bulan Juli, Agustus 1995 oleh Puslitbang Osenologi - LIPI, sebagai ilustrasi mengenai kemampuan alat. Data diproses dengan menggunakan piranti lunak alat DR- ADCP, Transect (RD Instrument, 1994). Sewaktu pengukuran dilakukan, kondisi arus dapat dimonitor di layar komputer seperti yang ditunjukkan oleh Gambar 2. Profil menegak komponen arus timur-barat, utara-selatan, arus vertikal dan estimasi standard deviasi pengukuran arus ditampilkan untuk tiap data yang diukur. Selain itu, ditampilkan pula informasi mengenai kecepatan kapal, kedalaman air, panjang lintasan yang telah diukur dan estimasi debit aliran arus sepanjang lintasan pengukuran. Semua informasi tersebut sangat penting karena digunakan untuk menilai sesuai tidaknya penyetelan DR-ADCP untuk kondisi perairan yang diukur. Disamping itu, adanya fenomena aliran air dapat segera diketahui. Dari data yang telah diperoleh, kemudian dilakukan perata-rataan data untuk mengurangi pengaruh proses lokal. hasil proses tersebut ditampilkan pada Gambar 3 dalam bentuk penggambaran vektor kecepatan. Dari penampilan ini hasil pengukuran arus dapat dengan mudah dikaitkan dengan kondisi lapangan sebenarnya. Gambar 4 adalah profil menegak debit air sepanjang lintasan pengukuran. Dari gambar ini, besarnya debit dikalikan dengan konsentrasi zat dalam air 4
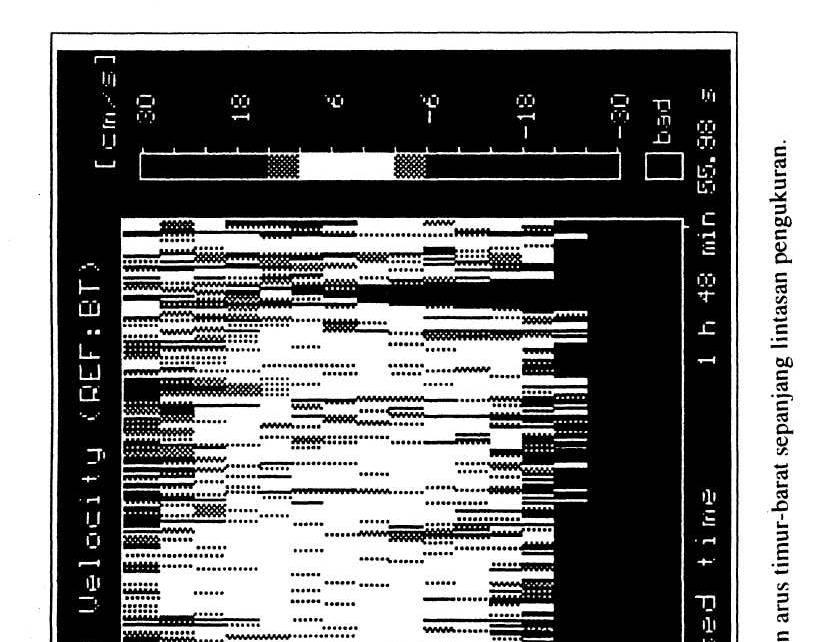
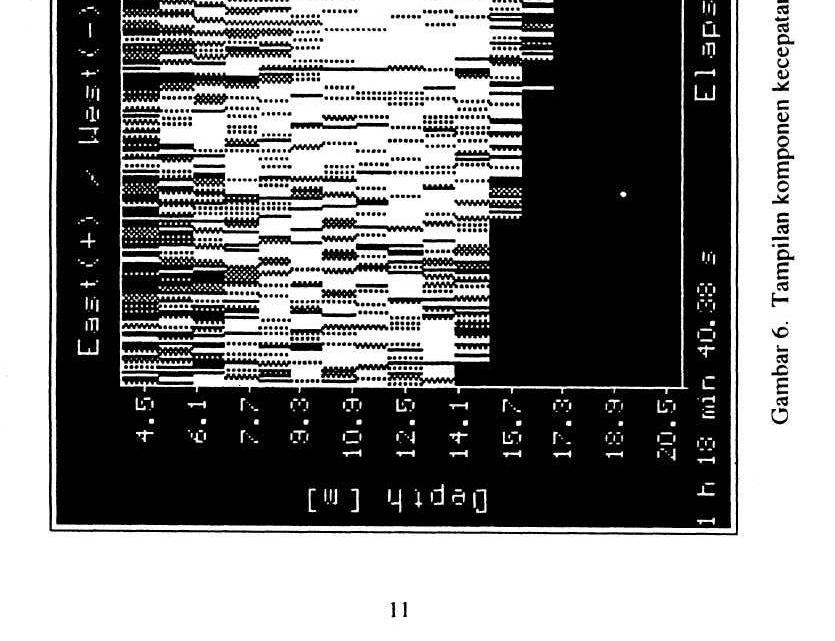
5 memberikan jumlah zat yang dipindahkan per satuan waktu. Informasi analisa arus ini sangat bermanfaat dalam studi kimia, biologi dan pencemaran laut. Tampilan data lainnya yang sangat bermanfaat selama kegiatan lapangan adalah distribusi menegak besarnya kecepatan komponen arus timur-barat (Gambar 5) dan komponen arus utara-selatan (Gambar 6). Dan gambar tersebut dapat segera disimpulkan adanya pelapisan aliran arus dalam kolom air. Sebagai contoh, kondisi arus pada Gambar 5 dan 6 menunjukkan terjadinya sistem aliran 2 lapis dan pengaruh topografi dasar pada aliran arus. Pada bagian permukaan air mengalir ke arah barat daya. sedangkan air di bawah 9m arus mengalir ke arah tenggara yang terkonsentrasi pada bagian kiri gosong. KESIMPULAN Acoustic Doppler Current Profiler merupakan suatu alat ukur yang sangat bermanfaat untuk memetakan kondisi aliran air secara mendetail. Kemampuan ini tidak dimiliki oleh alat ukur lainnya. Peranan aliran air laut yang menentukan dalam pola penyebaran zat hara, larva biota, sedimen, maupun zat pencemar, menunjukkan pentingnya informasi dari DR-ADCP ini dalam suatu program pengelolaan wilayah perairan. DAFTAR PUSTAKA RD Instruments, User's manual for the RD Instruments Transect Program : 190 pp. RD Instruments, Direct Reading and Self-contained Broadband Acoustic Doppler Current Profiler. Technical Manual : 396 pp. 5
6 Gambar 1. Perbandingan kemampuan antara ADCP dan Currrentmeter convensional 6

7 Gambar 2. Tampilan profil menegak arus dan informasi lainnya selama dilakukan pengukuran. 7
8 sumber:
9 sumber:

10 sumber:
11 sumber:
2. TINJAUAN PUSTAKA. oleh tiupan angin, perbedaan densitas air laut atau dapat pula disebabkan oleh
 3 2. TINJAUAN PUSTAKA 2.1 Arus Laut dan Metode Pengukurannya Arus merupakan gerakan mengalir suatu massa air yang dapat disebabkan oleh tiupan angin, perbedaan densitas air laut atau dapat pula disebabkan
3 2. TINJAUAN PUSTAKA 2.1 Arus Laut dan Metode Pengukurannya Arus merupakan gerakan mengalir suatu massa air yang dapat disebabkan oleh tiupan angin, perbedaan densitas air laut atau dapat pula disebabkan
DIRECTORY PERALATAN PENELITIAN LAUT DALAM PUSAT PENELITIAN LAUT DALAM LEMBAGA ILMU PENGETAHUAN INDONESIA BIDANG SARANA PENELITIAN
 DIRECTORY PERALATAN PENELITIAN LAUT DALAM PUSAT PENELITIAN LAUT DALAM LEMBAGA ILMU PENGETAHUAN INDONESIA BIDANG SARANA PENELITIAN LAB. ELEKTRONIK KR. BARUNA JAYA VII CTD PROFILER SBE 19plus CTD Underwater
DIRECTORY PERALATAN PENELITIAN LAUT DALAM PUSAT PENELITIAN LAUT DALAM LEMBAGA ILMU PENGETAHUAN INDONESIA BIDANG SARANA PENELITIAN LAB. ELEKTRONIK KR. BARUNA JAYA VII CTD PROFILER SBE 19plus CTD Underwater
Pengukuran Debit. Persyaratan lokasi pengukuran debit dengan mempertimbangkan factor-faktor, sebagai berikut:
 Pengukuran Debit Pengukuran debit dapat dilakukan secara langsung dan secara tidak langsung. Pengukuran debit secara langsung adalah pengukuran yang dilakukan dengan menggunakan peralatan berupa alat pengukur
Pengukuran Debit Pengukuran debit dapat dilakukan secara langsung dan secara tidak langsung. Pengukuran debit secara langsung adalah pengukuran yang dilakukan dengan menggunakan peralatan berupa alat pengukur
PEMBUATAN ALAT PENGUKUR ARUS SECARA SEDERHANA
 Oseana, Volume XVIII, Nomor 1 : 35-44 ISSN 0216-1877 PEMBUATAN ALAT PENGUKUR ARUS SECARA SEDERHANA oleh S u d a r t o 1) ABSTRACT Current observation in the sea can be done in simple way. One of the technique
Oseana, Volume XVIII, Nomor 1 : 35-44 ISSN 0216-1877 PEMBUATAN ALAT PENGUKUR ARUS SECARA SEDERHANA oleh S u d a r t o 1) ABSTRACT Current observation in the sea can be done in simple way. One of the technique
SIFAT FISIK OSEANOGRAFI PERAIRAN KEPULAUAN TAMBELAN DAN SEKITARNYA, PROPINSI KEPULAUAN RIAU
 Jurnal PERIKANAN dan KELAUTAN 15,2 (21) : 173-184 SIFAT FISIK OSEANOGRAFI PERAIRAN KEPULAUAN TAMBELAN DAN SEKITARNYA, PROPINSI KEPULAUAN RIAU Syaifuddin 1) 1) Dosen Fakultas Perikanan dan Ilmu Kelautan
Jurnal PERIKANAN dan KELAUTAN 15,2 (21) : 173-184 SIFAT FISIK OSEANOGRAFI PERAIRAN KEPULAUAN TAMBELAN DAN SEKITARNYA, PROPINSI KEPULAUAN RIAU Syaifuddin 1) 1) Dosen Fakultas Perikanan dan Ilmu Kelautan
3 METODE PENELITIAN 3.1 Waktu dan Lokasi Penelitian 3.2 Kapal Survei dan Instrumen Penelitian
 3 METODE PENELITIAN 3.1 Waktu dan Lokasi Penelitian Penelitian ini merupakan bagian dari Ekspedisi Selat Makassar 2003 yang diperuntukkan bagi Program Census of Marine Life (CoML) yang dilaksanakan oleh
3 METODE PENELITIAN 3.1 Waktu dan Lokasi Penelitian Penelitian ini merupakan bagian dari Ekspedisi Selat Makassar 2003 yang diperuntukkan bagi Program Census of Marine Life (CoML) yang dilaksanakan oleh
Sonar merupakan singkatan dari Sound, Navigation, and Ranging. Sonar digunakan untuk mengetahui penjalaran suara di dalam air.
 SONAR Sonar merupakan singkatan dari Sound, Navigation, and Ranging. Sonar digunakan untuk mengetahui penjalaran suara di dalam air. Cara Kerja Sonar merupakan sistem yang menggunakan gelombang suara bawah
SONAR Sonar merupakan singkatan dari Sound, Navigation, and Ranging. Sonar digunakan untuk mengetahui penjalaran suara di dalam air. Cara Kerja Sonar merupakan sistem yang menggunakan gelombang suara bawah
BAB I PENDAHULUAN I.1. Latar Belakang
 BAB I PENDAHULUAN I.1. Latar Belakang Kebutuhan akan data batimetri semakin meningkat seiring dengan kegunaan data tersebut untuk berbagai aplikasi, seperti perencanaan konstruksi lepas pantai, aplikasi
BAB I PENDAHULUAN I.1. Latar Belakang Kebutuhan akan data batimetri semakin meningkat seiring dengan kegunaan data tersebut untuk berbagai aplikasi, seperti perencanaan konstruksi lepas pantai, aplikasi
Pendahuluan. Peralatan. Sari. Abstract. Subarsyah dan M. Yusuf
 PENGARUH FREKUENSI GELOMBANG TERHADAP RESOLUSI DAN DELINEASI PERLAPISAN SEDIMEN BAWAH PERMUKAAN DARI DUA INSTRUMEN AKUSTIK YANG BERBEDA DI SUNGAI SAGULING Subarsyah dan M. Yusuf Pusat Penelitian dan Pengembangan
PENGARUH FREKUENSI GELOMBANG TERHADAP RESOLUSI DAN DELINEASI PERLAPISAN SEDIMEN BAWAH PERMUKAAN DARI DUA INSTRUMEN AKUSTIK YANG BERBEDA DI SUNGAI SAGULING Subarsyah dan M. Yusuf Pusat Penelitian dan Pengembangan
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Sedimen merupakan unsur pembentuk dasar perairan. Interaksi antara arus dengan dasar perairan berpengaruh terhadap laju angkutan sedimen. Laju angkutan sedimen tersebut
BAB I PENDAHULUAN 1.1 Latar Belakang Sedimen merupakan unsur pembentuk dasar perairan. Interaksi antara arus dengan dasar perairan berpengaruh terhadap laju angkutan sedimen. Laju angkutan sedimen tersebut
TEKNOLOGI SURVEI PEMETAAN LINGKUNGAN PANTAI
 Jurnal Ilmiah Geomatika Volume 20 No. 2 Desember 2014: 165-170 TEKNOLOGI SURVEI PEMETAAN LINGKUNGAN PANTAI (Surveying Technology for Coastal Mapping) Imam Mudita Badan Pengkajian dan Penerapan Teknologi
Jurnal Ilmiah Geomatika Volume 20 No. 2 Desember 2014: 165-170 TEKNOLOGI SURVEI PEMETAAN LINGKUNGAN PANTAI (Surveying Technology for Coastal Mapping) Imam Mudita Badan Pengkajian dan Penerapan Teknologi
TERBATAS 1 BAB II KETENTUAN SURVEI HIDROGRAFI. Tabel 1. Daftar Standard Minimum untuk Survei Hidrografi
 1 BAB II KETENTUAN SURVEI HIDROGRAFI 1. Perhitungan Ketelitian Ketelitian dari semua pekerjaan penentuan posisi maupun pekerjaan pemeruman selama survei dihitung dengan menggunakan metoda statistik tertentu
1 BAB II KETENTUAN SURVEI HIDROGRAFI 1. Perhitungan Ketelitian Ketelitian dari semua pekerjaan penentuan posisi maupun pekerjaan pemeruman selama survei dihitung dengan menggunakan metoda statistik tertentu
3. BAHAN DAN METODE. Penelitian ini dilakukan selama 5 bulan, yaitu pada bulan Maret sampai
 27 3. BAHAN DAN METODE 3.1. Waktu dan Lokasi Penelitian Penelitian ini dilakukan selama 5 bulan, yaitu pada bulan Maret sampai dengan Juli 2012. Data yang digunakan merupakan data mentah (raw data) dari
27 3. BAHAN DAN METODE 3.1. Waktu dan Lokasi Penelitian Penelitian ini dilakukan selama 5 bulan, yaitu pada bulan Maret sampai dengan Juli 2012. Data yang digunakan merupakan data mentah (raw data) dari
PERTEMUAN IV SURVEI HIDROGRAFI. Survei dan Pemetaan Universitas IGM Palembang
 PERTEMUAN IV SURVEI HIDROGRAFI Survei dan Pemetaan Universitas IGM Palembang Konfigurasi Survei Hidrografi 1. Penentuan posisi (1) dan penggunaan sistem referensi (7) 2. Pengukuran kedalaman (pemeruman)
PERTEMUAN IV SURVEI HIDROGRAFI Survei dan Pemetaan Universitas IGM Palembang Konfigurasi Survei Hidrografi 1. Penentuan posisi (1) dan penggunaan sistem referensi (7) 2. Pengukuran kedalaman (pemeruman)
METODE PENELITIAN. Tabel 2 Alat dan bahan yang digunakan dalam penelitian. No. Alat dan Bahan Type/Sumber Kegunaan.
 METODE PENELITIAN Waktu dan Lokasi Penelitian Pengambilan data lapang dilakukan pada tanggal 16-18 Mei 2008 di perairan gugusan pulau Pari, Kepulauan Seribu, Jakarta (Gambar 11). Lokasi ditentukan berdasarkan
METODE PENELITIAN Waktu dan Lokasi Penelitian Pengambilan data lapang dilakukan pada tanggal 16-18 Mei 2008 di perairan gugusan pulau Pari, Kepulauan Seribu, Jakarta (Gambar 11). Lokasi ditentukan berdasarkan
Materi-2 SENSOR DAN TRANSDUSER (2 SKS / TEORI) SEMESTER 106 TA 2016/2017
 SEMESTER 106 TA 2016/2017") Materi-2 SENSOR DAN TRANSDUSER 52150802 (2 SKS / TEORI) SEMESTER 106 TA 2016/2017 KONSEP AKUISISI DATA DAN KONVERSI PENGERTIAN Akuisisi data adalah pengukuran sinyal elektrik dari transduser dan peralatan
Materi-2 SENSOR DAN TRANSDUSER 52150802 (2 SKS / TEORI) SEMESTER 106 TA 2016/2017 KONSEP AKUISISI DATA DAN KONVERSI PENGERTIAN Akuisisi data adalah pengukuran sinyal elektrik dari transduser dan peralatan
BAB III METODE PENELITIAN. Adapun metode penelitian tersebut meliputi akuisisi data, memproses. data, dan interpretasi data seismik.
 19 BAB III METODE PENELITIAN 3.1. Metode penelitian Metode yang digunakan dalam penelitian ini adalah deskriptif analisitik dari data hasil rekaman seismik refleksi saluran tunggal. Adapun metode penelitian
19 BAB III METODE PENELITIAN 3.1. Metode penelitian Metode yang digunakan dalam penelitian ini adalah deskriptif analisitik dari data hasil rekaman seismik refleksi saluran tunggal. Adapun metode penelitian
BAB 2 KONSEP PENGOLAHAN DATA SIDE SCAN SONAR
 BAB 2 KONSEP PENGOLAHAN DATA SIDE SCAN SONAR Pengolahan data side scan sonar terdiri dari dua tahap, yaitu tahap real-time processing dan kemudian dilanjutkan dengan tahap post-processing. Tujuan realtime
BAB 2 KONSEP PENGOLAHAN DATA SIDE SCAN SONAR Pengolahan data side scan sonar terdiri dari dua tahap, yaitu tahap real-time processing dan kemudian dilanjutkan dengan tahap post-processing. Tujuan realtime
2. TINJAUAN PUSTAKA. Sedimen adalah kerak bumi (regolith) yang ditransportasikan melalui proses
 yang ditransportasikan melalui proses") 2. TINJAUAN PUSTAKA 2.1. Sedimen Dasar Laut Sedimen adalah kerak bumi (regolith) yang ditransportasikan melalui proses hidrologi dari suatu tempat ke tempat yang lain, baik secara vertikal maupun secara
2. TINJAUAN PUSTAKA 2.1. Sedimen Dasar Laut Sedimen adalah kerak bumi (regolith) yang ditransportasikan melalui proses hidrologi dari suatu tempat ke tempat yang lain, baik secara vertikal maupun secara
3. METODOLOGI PENELITIAN
 3. METODOLOGI PENELITIAN 3.1 Waktu dan Lokasi Penelitian Penelitian dilaksanakan pada bulan Juni 2011 sampai dengan Maret 2012. Kegiatan penelitian terdiri dari dua bagian, yaitu pembuatan alat dan uji
3. METODOLOGI PENELITIAN 3.1 Waktu dan Lokasi Penelitian Penelitian dilaksanakan pada bulan Juni 2011 sampai dengan Maret 2012. Kegiatan penelitian terdiri dari dua bagian, yaitu pembuatan alat dan uji
BAB IV PENGUJIAN ALAT DAN PEMBAHASAN
 BAB IV PENGUJIAN ALAT DAN PEMBAHASAN 4.1 Uji Coba Alat Dalam bab ini akan dibahas mengenai pengujian alat yang telah dibuat. Dimulai dengan pengujian setiap bagian-bagian dari hardware dan software yang
BAB IV PENGUJIAN ALAT DAN PEMBAHASAN 4.1 Uji Coba Alat Dalam bab ini akan dibahas mengenai pengujian alat yang telah dibuat. Dimulai dengan pengujian setiap bagian-bagian dari hardware dan software yang
BAB III PERANCANGAN. Pada bab ini akan menjelaskan perancangan alat yang akan penulis buat.
 BAB III PERANCANGAN Pada bab ini akan menjelaskan perancangan alat yang akan penulis buat. Perancangan tersebut mulai dari: blok diagram sampai dengan perancangan rangkaian elektronik, sebagai penunjang
BAB III PERANCANGAN Pada bab ini akan menjelaskan perancangan alat yang akan penulis buat. Perancangan tersebut mulai dari: blok diagram sampai dengan perancangan rangkaian elektronik, sebagai penunjang
AKUSTIK REMOTE SENSING/PENGINDERAAN JAUH
 P. Ika Wahyuningrum AKUSTIK REMOTE SENSING/PENGINDERAAN JAUH Suatu teknologi pendeteksian obyek dibawah air dengan menggunakan instrumen akustik yang memanfaatkan suara dengan gelombang tertentu Secara
P. Ika Wahyuningrum AKUSTIK REMOTE SENSING/PENGINDERAAN JAUH Suatu teknologi pendeteksian obyek dibawah air dengan menggunakan instrumen akustik yang memanfaatkan suara dengan gelombang tertentu Secara
Scientific Echosounders
 Scientific Echosounders Namun secara secara elektronik didesain dengan amplitudo pancaran gelombang yang stabil, perhitungan waktu yang lebih akuran dan berbagai menu dan software tambahan. Contoh scientific
Scientific Echosounders Namun secara secara elektronik didesain dengan amplitudo pancaran gelombang yang stabil, perhitungan waktu yang lebih akuran dan berbagai menu dan software tambahan. Contoh scientific
BAB IV PENGUJIAN DAN ANALISA
 54 BAB IV PENGUJIAN DAN ANALISA Dalam bab ini akan dibahas tentang pengujian berdasarkan perencanaan dari sistem yang dibuat. Pengujian ini dilakukan untuk mengetahui kinerja dari sistem mulai dari blok-blok
54 BAB IV PENGUJIAN DAN ANALISA Dalam bab ini akan dibahas tentang pengujian berdasarkan perencanaan dari sistem yang dibuat. Pengujian ini dilakukan untuk mengetahui kinerja dari sistem mulai dari blok-blok
Gambar 8. Lokasi penelitian
 3. METODOLOGI PENELITIAN 3.1 Waktu dan lokasi penelitian Penelitian ini dilaksanakan pada tanggal 30 Januari-3 Februari 2011 yang di perairan Pulau Gosong, Pulau Semak Daun dan Pulau Panggang, Kabupaten
3. METODOLOGI PENELITIAN 3.1 Waktu dan lokasi penelitian Penelitian ini dilaksanakan pada tanggal 30 Januari-3 Februari 2011 yang di perairan Pulau Gosong, Pulau Semak Daun dan Pulau Panggang, Kabupaten
BAB 3 PENENTUAN POSISI DAN APLIKASI ROV
 BAB 3 PENENTUAN POSISI DAN APLIKASI ROV 3.1. Persiapan Sebelum kegiatan survei berlangsung, dilakukan persiapan terlebih dahulu untuk mempersiapkan segala peralatan yang dibutuhkan selama kegiatan survei
BAB 3 PENENTUAN POSISI DAN APLIKASI ROV 3.1. Persiapan Sebelum kegiatan survei berlangsung, dilakukan persiapan terlebih dahulu untuk mempersiapkan segala peralatan yang dibutuhkan selama kegiatan survei
Gambar 11 Sistem kalibrasi dengan satu sensor.
 7 Gambar Sistem kalibrasi dengan satu sensor. Besarnya debit aliran diukur dengan menggunakan wadah ukur. Wadah ukur tersebut di tempatkan pada tempat keluarnya aliran yang kemudian diukur volumenya terhadap
7 Gambar Sistem kalibrasi dengan satu sensor. Besarnya debit aliran diukur dengan menggunakan wadah ukur. Wadah ukur tersebut di tempatkan pada tempat keluarnya aliran yang kemudian diukur volumenya terhadap
Gambar 4.1. Kemampuan sensor LIDAR untuk memisahkan antara permukaan tanah dengan vegetasi di atasanya [Karvak, 2007]
![Gambar 4.1. Kemampuan sensor LIDAR untuk memisahkan antara permukaan tanah dengan vegetasi di atasanya [Karvak, 2007]](/thumbs/62/47235576.jpg "Gambar 4.1. Kemampuan sensor LIDAR untuk memisahkan antara permukaan tanah dengan vegetasi di atasanya [Karvak, 2007]") BAB IV ANALISIS 4.1. Analisis Data LIDAR 4.1.1. Analisis Kualitas Data LIDAR Data LIDAR memiliki akurasi yang cukup tinggi (akurasi vertikal = 15-20 cm, akurasi horizontal = 0.3-1 m), dan resolusi yang
BAB IV ANALISIS 4.1. Analisis Data LIDAR 4.1.1. Analisis Kualitas Data LIDAR Data LIDAR memiliki akurasi yang cukup tinggi (akurasi vertikal = 15-20 cm, akurasi horizontal = 0.3-1 m), dan resolusi yang
Sistem Pengukuran Data Akuisisi
 Sistem Pengukuran Data Akuisisi Missa Lamsani Hal 1 Perkembangan Sistem Akuisisi Data Pada mulanya proses pengolahan data lebih banyak dilakukan secara manual oleh manusia, sehingga pada saat itu perubahan
Sistem Pengukuran Data Akuisisi Missa Lamsani Hal 1 Perkembangan Sistem Akuisisi Data Pada mulanya proses pengolahan data lebih banyak dilakukan secara manual oleh manusia, sehingga pada saat itu perubahan
4. HASIL DAN PEMBAHASAN
 4. HASIL DAN PEMBAHASAN 4.1. Sedimen Dasar Perairan Berdasarkan pengamatan langsung terhadap sampling sedimen dasar perairan di tiap-tiap stasiun pengamatan tipe substrat dikelompokkan menjadi 2, yaitu:
4. HASIL DAN PEMBAHASAN 4.1. Sedimen Dasar Perairan Berdasarkan pengamatan langsung terhadap sampling sedimen dasar perairan di tiap-tiap stasiun pengamatan tipe substrat dikelompokkan menjadi 2, yaitu:
KONSEP DASAR PENGUKRAN. Primary sensing element Variable conversion element Data presentation element
 KONSEP DASAR PENGUKRAN Primary sensing element Variable conversion element Data presentation element PRIMARY SENSING ELEMENT Elemen pengindraan Utama adalah Tranduser. Tranduser adalah sebuah alat yang
KONSEP DASAR PENGUKRAN Primary sensing element Variable conversion element Data presentation element PRIMARY SENSING ELEMENT Elemen pengindraan Utama adalah Tranduser. Tranduser adalah sebuah alat yang
BAB III LANDASAN TEORI. lingkungan. Apapun macam teknologi pengolahan air limbah domestik maupun
 BAB III LANDASAN TEORI 3.1 Waste Water Treatment Teknologi pengolahan air limbah adalah kunci dalam memelihara kelestarian lingkungan. Apapun macam teknologi pengolahan air limbah domestik maupun industri
BAB III LANDASAN TEORI 3.1 Waste Water Treatment Teknologi pengolahan air limbah adalah kunci dalam memelihara kelestarian lingkungan. Apapun macam teknologi pengolahan air limbah domestik maupun industri
Petunjuk Penggunaan SENSOR GERAK (GSC )
") Petunjuk Penggunaan SENSOR GERAK (GSC 410 15) Jl. PUDAK No. 4 Bandung 40113, Jawa Barat-INDONESIA - Phone +62-22-727 2755 (Hunting) Fax. +62-22-720 7252 - E-mail: contact@pudak.com - Website: www.pudak.com
Petunjuk Penggunaan SENSOR GERAK (GSC 410 15) Jl. PUDAK No. 4 Bandung 40113, Jawa Barat-INDONESIA - Phone +62-22-727 2755 (Hunting) Fax. +62-22-720 7252 - E-mail: contact@pudak.com - Website: www.pudak.com
KARAKTERISTIK ARUS, SUHU DAN SALINITAS DI KEPULAUAN KARIMUNJAWA
 JOURNAL OF OCEANOGRAPHY. Volume 1, Nomor 2, Tahun 2012, Halaman 186-196 Online di : http://ejournal-s1.undip.ac.id/index.php/joce KARAKTERISTIK ARUS, SUHU DAN SALINITAS DI KEPULAUAN KARIMUNJAWA Dinda,
JOURNAL OF OCEANOGRAPHY. Volume 1, Nomor 2, Tahun 2012, Halaman 186-196 Online di : http://ejournal-s1.undip.ac.id/index.php/joce KARAKTERISTIK ARUS, SUHU DAN SALINITAS DI KEPULAUAN KARIMUNJAWA Dinda,
HASIL DAN PEMBAHASAN
 HASIL DAN PEMBAHASAN Data Lapangan Berdasarkan pengamatan langsung di lapangan dengan melakukan penyelaman di lokasi transek lamun, diperoleh data yang diuraikan pada Tabel 4. Lokasi penelitian berada
HASIL DAN PEMBAHASAN Data Lapangan Berdasarkan pengamatan langsung di lapangan dengan melakukan penyelaman di lokasi transek lamun, diperoleh data yang diuraikan pada Tabel 4. Lokasi penelitian berada
Hidrometri Hidrometri merupakan ilmu pengetahuan tentang cara-cara pengukuran dan pengolahan data unsur-unsur aliran. Pada bab ini akan diberikan urai
 Hidrometri Hidrometri merupakan ilmu pengetahuan tentang cara-cara pengukuran dan pengolahan data unsur-unsur aliran. Pada bab ini akan diberikan uraian tentang beberapa cara pengukuran data unsur aliran
Hidrometri Hidrometri merupakan ilmu pengetahuan tentang cara-cara pengukuran dan pengolahan data unsur-unsur aliran. Pada bab ini akan diberikan uraian tentang beberapa cara pengukuran data unsur aliran
Gambar 1. Pola sirkulasi arus global. (www.namce8081.wordpress.com)
") Arus Geostropik Peristiwa air yang mulai bergerak akibat gradien tekanan, maka pada saat itu pula gaya coriolis mulai bekerja. Pada saat pembelokan mencapai 90 derajat, maka arah gerak partikel akan sejajar
Arus Geostropik Peristiwa air yang mulai bergerak akibat gradien tekanan, maka pada saat itu pula gaya coriolis mulai bekerja. Pada saat pembelokan mencapai 90 derajat, maka arah gerak partikel akan sejajar
Gambar 3.1. Rencana jalur survei tahap I [Tim Navigasi Survei LKI, 2009]
![Gambar 3.1. Rencana jalur survei tahap I [Tim Navigasi Survei LKI, 2009]](/thumbs/57/40841498.jpg "Gambar 3.1. Rencana jalur survei tahap I [Tim Navigasi Survei LKI, 2009]") BAB III REALISASI DAN HASIL SURVEI 3.1 Rencana dan Pelaksanaan Survei Survei dilakukan selama dua tahap, yaitu tahap I adalah survei batimetri untuk menentukan Foot Of Slope (FOS) dengan menggunakan kapal
BAB III REALISASI DAN HASIL SURVEI 3.1 Rencana dan Pelaksanaan Survei Survei dilakukan selama dua tahap, yaitu tahap I adalah survei batimetri untuk menentukan Foot Of Slope (FOS) dengan menggunakan kapal
Kuliah ke-2 Pengukuran Gelombang
 Kuliah ke-2 Pengukuran Gelombang http://scholarworks.uno.edu/cgi/viewcontent.cgi?article=1012&context=oceanwaves UNIVERSITAS GADJAH MADA Pengukuran Gelombang Metode Pengukuran 1. alat-alat ukur berada
Kuliah ke-2 Pengukuran Gelombang http://scholarworks.uno.edu/cgi/viewcontent.cgi?article=1012&context=oceanwaves UNIVERSITAS GADJAH MADA Pengukuran Gelombang Metode Pengukuran 1. alat-alat ukur berada
METODE. 3.1 Waktu dan Tempat Pelaksanaan. 3.2 Alat dan Bahan Bahan Alat
 METODE 3.1 Waktu dan Tempat Pelaksanaan Penelitian dilakukan di Laboratorium Ergonomika dan Elektronika Pertanian, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian dan di Laboratorium
METODE 3.1 Waktu dan Tempat Pelaksanaan Penelitian dilakukan di Laboratorium Ergonomika dan Elektronika Pertanian, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian dan di Laboratorium
1. PENDAHULUAN. 1.1 Latar Belakang
 1 1. PENDAHULUAN 1.1 Latar Belakang Perairan Indonesia merupakan area yang mendapatkan pengaruh Angin Muson dari tenggara pada saat musim dingin di wilayah Australia, dan dari barat laut pada saat musim
1 1. PENDAHULUAN 1.1 Latar Belakang Perairan Indonesia merupakan area yang mendapatkan pengaruh Angin Muson dari tenggara pada saat musim dingin di wilayah Australia, dan dari barat laut pada saat musim
3. BAHAN DAN METODE. data oseanografi perairan Raja Ampat yang diperoleh dari program terpadu P2O-
 . BAHAN DAN METODE.1 Waktu dan Tempat Penelitian Data yang digunakan pada penelitian ini merupakan data sekunder yaitu data oseanografi perairan aja Ampat yang diperoleh dari program terpadu PO- LIPI dengan
. BAHAN DAN METODE.1 Waktu dan Tempat Penelitian Data yang digunakan pada penelitian ini merupakan data sekunder yaitu data oseanografi perairan aja Ampat yang diperoleh dari program terpadu PO- LIPI dengan
4. HASIL DAN PEMBAHASAN
 4. HASIL DAN PEMBAHASAN 4.1. Hasil Analisis Nilai Target Strength (TS) Pada Ikan Mas (Cyprinus carpio) Nilai target strength (TS) merupakan parameter utama pada aplikasi metode akustik dalam menduga kelimpahan
4. HASIL DAN PEMBAHASAN 4.1. Hasil Analisis Nilai Target Strength (TS) Pada Ikan Mas (Cyprinus carpio) Nilai target strength (TS) merupakan parameter utama pada aplikasi metode akustik dalam menduga kelimpahan
PRINSIP KERJA, CARA KERJA DAN PENERAPAN APLIKASI TRANSFORMATOR DIFFERENSIAL TUGAS PENGUKURAN TEKNIK KELOMPOK IV
 PRINSIP KERJA, CARA KERJA DAN PENERAPAN APLIKASI TRANSFORMATOR DIFFERENSIAL TUGAS PENGUKURAN TEKNIK KELOMPOK IV 1. Torang Ridho S 0806368906 2. Deni Mulia Noventianus 0906604722 3. Mohammad Adiwirabrata
PRINSIP KERJA, CARA KERJA DAN PENERAPAN APLIKASI TRANSFORMATOR DIFFERENSIAL TUGAS PENGUKURAN TEKNIK KELOMPOK IV 1. Torang Ridho S 0806368906 2. Deni Mulia Noventianus 0906604722 3. Mohammad Adiwirabrata
BAB III ANALISA SISTEM
 BAB III ANALISA SISTEM 3.1 Gambaran Sistem Umum Pembuka pintu otomatis merupakan sebuah alat yang berfungsi membuka pintu sebagai penganti pintu konvensional. Perancangan sistem pintu otomatis ini merupakan
BAB III ANALISA SISTEM 3.1 Gambaran Sistem Umum Pembuka pintu otomatis merupakan sebuah alat yang berfungsi membuka pintu sebagai penganti pintu konvensional. Perancangan sistem pintu otomatis ini merupakan
Bab 3 DESKRIPSI PEKERJAAN. 3.1 Gambaran Umum Pekerjaan Lokasi dan Alat
 Bab 3 DESKRIPSI PEKERJAAN Uji Model Fisik Pemecah Gelombang Tipe Tiang Pancang Bertirai 3.1 Gambaran Umum Pekerjaan 3.1.1 Lokasi dan Alat Pekerjaan uji fisik yang dilakukan di Laboratorium Gelombang Teknik
Bab 3 DESKRIPSI PEKERJAAN Uji Model Fisik Pemecah Gelombang Tipe Tiang Pancang Bertirai 3.1 Gambaran Umum Pekerjaan 3.1.1 Lokasi dan Alat Pekerjaan uji fisik yang dilakukan di Laboratorium Gelombang Teknik
BAB IV ANALISA DATA DAN PEMBAHASAN
 BAB IV ANALISA DATA DAN PEMBAHASAN 4.1 PLC (Programmable Logic Controller) Pada sub bab ini penulis membahas tentang program PLC yang digunakan dalam system ini. Secara garis besar program ini terdiri
BAB IV ANALISA DATA DAN PEMBAHASAN 4.1 PLC (Programmable Logic Controller) Pada sub bab ini penulis membahas tentang program PLC yang digunakan dalam system ini. Secara garis besar program ini terdiri
BAB III PERANCANGAN DAN SISTEM
 BAB III PERANCANGAN DAN SISTEM 3.1 Rangkaian Blok Diagram Fungsi Setiap Blok Gambar 3.1 Rangkaian Blok Diagram Blok Suplay Blok Fotodioda : Sebagai Sumber Tegangan : Sebagai pendeteksi cahaya Blok Mikrokontroller
BAB III PERANCANGAN DAN SISTEM 3.1 Rangkaian Blok Diagram Fungsi Setiap Blok Gambar 3.1 Rangkaian Blok Diagram Blok Suplay Blok Fotodioda : Sebagai Sumber Tegangan : Sebagai pendeteksi cahaya Blok Mikrokontroller
VALIDASI DAN KARAKTERISASI FLOW METER E-MAG UNTUK PENGEMBANGAN SISTEM AKUISISI DATA FASILITAS EKSPERIMEN UNTAI UJI BETA ABSTRAK
 VALIDASI DAN KARAKTERISASI FLOW METER E-MAG UNTUK PENGEMBANGAN SISTEM AKUISISI DATA FASILITAS EKSPERIMEN UNTAI UJI BETA G. Bambang Heru K., Ahmad Abtokhi, Ainur Rosidi Pusat Teknologi Reaktor dan Keselamatan
VALIDASI DAN KARAKTERISASI FLOW METER E-MAG UNTUK PENGEMBANGAN SISTEM AKUISISI DATA FASILITAS EKSPERIMEN UNTAI UJI BETA G. Bambang Heru K., Ahmad Abtokhi, Ainur Rosidi Pusat Teknologi Reaktor dan Keselamatan
3. METODE PENELITIAN
 3. METODE PENELITIAN 3.1. Waktu dan Lokasi Penelitian Penelitian ini menggunakan data side scan sonar yang berasal dari survei lapang untuk kegiatan pemasangan kabel PLN yang telah dilakukan oleh Pusat
3. METODE PENELITIAN 3.1. Waktu dan Lokasi Penelitian Penelitian ini menggunakan data side scan sonar yang berasal dari survei lapang untuk kegiatan pemasangan kabel PLN yang telah dilakukan oleh Pusat
3. BAHAN DAN METODE. dan Pemetaan Nasional (BAKOSURTANAL) pada tanggal 15 Januari sampai 15
 pada tanggal 15 Januari sampai 15") 13 3. BAHAN DAN METODE 3.1 Waktu dan Lokasi Penelitian Data diperoleh dari survei yang dilakukan oleh Badan Koordinasi Survei dan Pemetaan Nasional (BAKOSURTANAL) pada tanggal 15 Januari sampai 15 Februari
13 3. BAHAN DAN METODE 3.1 Waktu dan Lokasi Penelitian Data diperoleh dari survei yang dilakukan oleh Badan Koordinasi Survei dan Pemetaan Nasional (BAKOSURTANAL) pada tanggal 15 Januari sampai 15 Februari
BAB III PERANCANGAN DAN REALISASI ALAT
 BAB III PERANCANGAN DAN REALISASI ALAT Pada bab ini akan dibahas mengenai perancangan sistem dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung alat secara keseluruhan.
BAB III PERANCANGAN DAN REALISASI ALAT Pada bab ini akan dibahas mengenai perancangan sistem dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung alat secara keseluruhan.
1. PENDAHULUAN 1.1. Latar belakang
 1. PENDAHULUAN 1.1. Latar belakang Dasar perairan memiliki peranan yang sangat penting yaitu sebagai habitat bagi bermacam-macam makhluk hidup yang kehidupannya berasosiasi dengan lingkungan perairan.
1. PENDAHULUAN 1.1. Latar belakang Dasar perairan memiliki peranan yang sangat penting yaitu sebagai habitat bagi bermacam-macam makhluk hidup yang kehidupannya berasosiasi dengan lingkungan perairan.
DTG 2M3 - ALAT UKUR DAN PENGUKURAN TELEKOMUNIKASI
 DTG 2M3 - ALAT UKUR DAN PENGUKURAN TELEKOMUNIKASI By : Dwi Andi Nurmantris PENDAHULUAN PENGUKURAN PENGERTIAN PENGUKURAN Pengukuran dapat didefinisikan sebagai suatu proses pemberian angka atau label terhadap
DTG 2M3 - ALAT UKUR DAN PENGUKURAN TELEKOMUNIKASI By : Dwi Andi Nurmantris PENDAHULUAN PENGUKURAN PENGERTIAN PENGUKURAN Pengukuran dapat didefinisikan sebagai suatu proses pemberian angka atau label terhadap
BAB III TINJAUAN MENGENAI INERTIAL NAVIGATION SYSTEM
 32 BAB III TINJAUAN MENGENAI INERTIAL NAVIGATION SYSTEM 3.1 Pergerakan rotasi wahana terbang Wahana terbang seperti pesawat terbang dan helikopter mempunyai sistem salib sumbu x, y, dan z di mana masing-masing
32 BAB III TINJAUAN MENGENAI INERTIAL NAVIGATION SYSTEM 3.1 Pergerakan rotasi wahana terbang Wahana terbang seperti pesawat terbang dan helikopter mempunyai sistem salib sumbu x, y, dan z di mana masing-masing
BAB 1 PENDAHULUAN 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Kondisi geografis Indonesia yang 75% luas wilayahnya merupakan lautan memiliki potensi kekayaan yang tak ternilai. Oleh karenanya diperlukan perhatian serta penanganan
BAB 1 PENDAHULUAN 1.1 Latar Belakang Kondisi geografis Indonesia yang 75% luas wilayahnya merupakan lautan memiliki potensi kekayaan yang tak ternilai. Oleh karenanya diperlukan perhatian serta penanganan
LAMPIRAN A - Prosedur Patch Test
 DAFTAR PUSTAKA Abidin, Hasanuddin Z. Metode Penentuan dengan GPS dan Aplikasinya. Pradnya Paramita. 2001. Budhiargo, Guntur. Analisis data batimetri multibeam echosounder menggunakan Caris HIPS. Skripsi.
DAFTAR PUSTAKA Abidin, Hasanuddin Z. Metode Penentuan dengan GPS dan Aplikasinya. Pradnya Paramita. 2001. Budhiargo, Guntur. Analisis data batimetri multibeam echosounder menggunakan Caris HIPS. Skripsi.
Pengukuran Waktu Tunda (Time Delay) pada Dua Sinyal dengan Cross Correlation Function (CCF)
 pada Dua Sinyal dengan Cross Correlation Function (CCF)") Jurnal Penelitian Sains Volume 12 Nomer 1(B) 12102 Pengukuran Waktu Tunda (Time Delay) pada Dua Sinyal dengan Cross Correlation Function (CCF) Erry Koriyanti Jurusan Fisika FMIPA, Universitas Sriwijaya,
Jurnal Penelitian Sains Volume 12 Nomer 1(B) 12102 Pengukuran Waktu Tunda (Time Delay) pada Dua Sinyal dengan Cross Correlation Function (CCF) Erry Koriyanti Jurusan Fisika FMIPA, Universitas Sriwijaya,
Oleh Satria Yudha Asmara Perdana Pembimbing Eko Minarto, M.Si Drs. Helfinalis M.Sc
 Oleh Satria Yudha Asmara Perdana 1105 100 047 Pembimbing Eko Minarto, M.Si Drs. Helfinalis M.Sc PENDAHULUAN Latar Belakang Pulau Bawean memiliki atraksi pariwisata pantai yang cukup menawan, dan sumber
Oleh Satria Yudha Asmara Perdana 1105 100 047 Pembimbing Eko Minarto, M.Si Drs. Helfinalis M.Sc PENDAHULUAN Latar Belakang Pulau Bawean memiliki atraksi pariwisata pantai yang cukup menawan, dan sumber
4. HASIL DAN PEMBAHASAN
 4. HASIL DAN PEMBAHASAN 4.1. Batimetri Selat Sunda Peta batimetri adalah peta yang menggambarkan bentuk konfigurasi dasar laut dinyatakan dengan angka-angka suatu kedalaman dan garis-garis yang mewakili
4. HASIL DAN PEMBAHASAN 4.1. Batimetri Selat Sunda Peta batimetri adalah peta yang menggambarkan bentuk konfigurasi dasar laut dinyatakan dengan angka-angka suatu kedalaman dan garis-garis yang mewakili
BAB 4 IMPLEMENTASI DAN EVALUASI. Pada Bab IV ini menjelaskan tentang spesifikasi sistem, rancang bangun
 BAB 4 IMPLEMENTASI DAN EVALUASI Pada Bab IV ini menjelaskan tentang spesifikasi sistem, rancang bangun keseluruhan sistem, prosedur pengoperasian sistem, implementasi dari sistem dan evaluasi hasil pengujian
BAB 4 IMPLEMENTASI DAN EVALUASI Pada Bab IV ini menjelaskan tentang spesifikasi sistem, rancang bangun keseluruhan sistem, prosedur pengoperasian sistem, implementasi dari sistem dan evaluasi hasil pengujian
IV. HASIL DAN PEMBAHASAN. Hasil dari perancangan perangkat keras sistem penyiraman tanaman secara
 IV. HASIL DAN PEMBAHASAN A. Realisasi Perangkat Keras Hasil dari perancangan perangkat keras sistem penyiraman tanaman secara otomatis menggunakan sensor suhu LM35 ditunjukkan pada gambar berikut : 8 6
IV. HASIL DAN PEMBAHASAN A. Realisasi Perangkat Keras Hasil dari perancangan perangkat keras sistem penyiraman tanaman secara otomatis menggunakan sensor suhu LM35 ditunjukkan pada gambar berikut : 8 6
Analisis Jarak Microphone Array dengan Teknik Pemrosesan Sinyal Fast Fourier Transform Beamforming
 85 Analisis Jarak Microphone Array dengan Teknik Pemrosesan Sinyal Fast Fourier Transform Beamforming Moh Fausi, Agus Naba dan Djoko Santjojo Abstract The main problem in the application of the sound source
85 Analisis Jarak Microphone Array dengan Teknik Pemrosesan Sinyal Fast Fourier Transform Beamforming Moh Fausi, Agus Naba dan Djoko Santjojo Abstract The main problem in the application of the sound source
4. HASIL DAN PEMBAHASAN
 4. HASIL DAN PEMBAHASAN 4.1 Hasil Pengambilan Contoh Dasar Gambar 16 merupakan hasil dari plot bottom sampling dari beberapa titik yang dilakukan secara acak untuk mengetahui dimana posisi target yang
4. HASIL DAN PEMBAHASAN 4.1 Hasil Pengambilan Contoh Dasar Gambar 16 merupakan hasil dari plot bottom sampling dari beberapa titik yang dilakukan secara acak untuk mengetahui dimana posisi target yang
Deskripsi ALAT DETEKSI LEBAR REL KERETA API SECARA REAL TIME DAN OTOMATIS
 1 Deskripsi ALAT DETEKSI LEBAR REL KERETA API SECARA REAL TIME DAN OTOMATIS Bidang Teknik Invensi Invensi ini berhubungan dengan suatu alat untuk mendeteksi lebar rel kereta api, khususnya alat ukur tersebut
1 Deskripsi ALAT DETEKSI LEBAR REL KERETA API SECARA REAL TIME DAN OTOMATIS Bidang Teknik Invensi Invensi ini berhubungan dengan suatu alat untuk mendeteksi lebar rel kereta api, khususnya alat ukur tersebut
(a) Profil kecepatan arus IM03. (b) Profil arah arus IM03. Gambar III.19 Perekaman profil arus dan pasut stasiun IM03 III-17
 Profil kecepatan arus IM03. (b) Profil arah arus IM03. Gambar III.19 Perekaman profil arus dan pasut stasiun IM03 III-17") (a) Profil kecepatan arus IM3 (b) Profil arah arus IM3 Gambar III.19 Perekaman profil arus dan pasut stasiun IM3 III-17 Gambar III.2 Spektrum daya komponen vektor arus stasiun IM2 Gambar III.21 Spektrum
(a) Profil kecepatan arus IM3 (b) Profil arah arus IM3 Gambar III.19 Perekaman profil arus dan pasut stasiun IM3 III-17 Gambar III.2 Spektrum daya komponen vektor arus stasiun IM2 Gambar III.21 Spektrum
Rancang Bangun Intrumentasi Pengukur Kecepatan Arus Air Berdasarkan Sistem Kerja Baling-Baling
 Rancang Bangun Intrumentasi Pengukur Kecepatan Arus Air Berdasarkan Sistem Kerja Baling-Baling 1)Wahyu Kresno Edhy, 1) Abdul Muid, 1) Muh. Ishak Jumarang 1)Program Studi Fisika, Fakultas Matematika dan
Rancang Bangun Intrumentasi Pengukur Kecepatan Arus Air Berdasarkan Sistem Kerja Baling-Baling 1)Wahyu Kresno Edhy, 1) Abdul Muid, 1) Muh. Ishak Jumarang 1)Program Studi Fisika, Fakultas Matematika dan
BAB II DASAR TEORI Mesin bending Megobal
 BAB II DASAR TEORI Bab ini menjelaskan tentang dasar teori dan penjelasan detail mengenai mesin bending dan peralatan yang digunakan dalam skripsi ini. Peralatan yang dibahas adalah Human Machine Interface
BAB II DASAR TEORI Bab ini menjelaskan tentang dasar teori dan penjelasan detail mengenai mesin bending dan peralatan yang digunakan dalam skripsi ini. Peralatan yang dibahas adalah Human Machine Interface
METODE PENELITIAN. Lokasi dan Waktu Penelitian
 METODE PENELITIAN Lokasi dan Waktu Penelitian Data arus diperoleh dari Mooring Aanderaa yang merupakan bagian dari Program Arlindo Indonesia-USA pada dua lokasi di Selat Makassar masingmasing pada posisi
METODE PENELITIAN Lokasi dan Waktu Penelitian Data arus diperoleh dari Mooring Aanderaa yang merupakan bagian dari Program Arlindo Indonesia-USA pada dua lokasi di Selat Makassar masingmasing pada posisi
BAB III METODE PENELITIAN. Pada proses pembuatan Tugas Akhir ini banyak media-media alat yang
 BAB III METODE PENELITIAN 3.1 Alat dan Bahan 3.1.1 Daftar alat Pada proses pembuatan Tugas Akhir ini banyak media-media alat yang digunakan agar proses pembuatan bisa berjalan dengan maksimal. Daftar alat-alat
BAB III METODE PENELITIAN 3.1 Alat dan Bahan 3.1.1 Daftar alat Pada proses pembuatan Tugas Akhir ini banyak media-media alat yang digunakan agar proses pembuatan bisa berjalan dengan maksimal. Daftar alat-alat
BAB IV PENGUJIAN DAN ANALISIS
 BAB IV PENGUJIAN DAN ANALISIS Pada bab ini akan dibahas mengenai pengujian alat serta analisis dari hasil pengujian. Tujuan dilakukan pengujian adalah mengetahui sejauh mana kinerja hasil perancangan wireless
BAB IV PENGUJIAN DAN ANALISIS Pada bab ini akan dibahas mengenai pengujian alat serta analisis dari hasil pengujian. Tujuan dilakukan pengujian adalah mengetahui sejauh mana kinerja hasil perancangan wireless
DAFTAR ISI Hasil Uji Model Hidraulik UWS di Pelabuhan PT. Pertamina RU VI
 DAFTAR ISI ALAMAN JUDUL... i ALAMAN PENGESAAN... ii PERSEMBAAN... iii ALAMAN PERNYATAAN... iv KATA PENGANTAR... v DAFTAR ISI... vi DAFTAR TABEL... x DAFTAR GAMBAR... xi DAFTAR LAMBANG... xiii INTISARI...
DAFTAR ISI ALAMAN JUDUL... i ALAMAN PENGESAAN... ii PERSEMBAAN... iii ALAMAN PERNYATAAN... iv KATA PENGANTAR... v DAFTAR ISI... vi DAFTAR TABEL... x DAFTAR GAMBAR... xi DAFTAR LAMBANG... xiii INTISARI...
1. PENDAHULUAN 1.1 Latar Belakang
 1. PENDAHULUAN 1.1 Latar Belakang Modern Drifter Buoy adalah versi teknologi tinggi dari pesan dalam botol, dimana alat tersebut terdiri atas surface buoy dan subsurface drogue yang mampu melakukan pengukuran
1. PENDAHULUAN 1.1 Latar Belakang Modern Drifter Buoy adalah versi teknologi tinggi dari pesan dalam botol, dimana alat tersebut terdiri atas surface buoy dan subsurface drogue yang mampu melakukan pengukuran
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan perancangan alat, yaitu perancangan perangkat keras dan perancangan perangkat lunak. Perancangan perangkat keras terdiri dari perangkat elektronik
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan perancangan alat, yaitu perancangan perangkat keras dan perancangan perangkat lunak. Perancangan perangkat keras terdiri dari perangkat elektronik
III. METODE PENELITIAN. Penelitian ini mulai dilaksanakan pada bulan Juli 2014 sampai Februari 2015.
 32 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian ini mulai dilaksanakan pada bulan Juli 2014 sampai Februari 2015. Pembuatan alat dilaksanakan di Laboratorium Elektronika & Instrumentasi
32 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian ini mulai dilaksanakan pada bulan Juli 2014 sampai Februari 2015. Pembuatan alat dilaksanakan di Laboratorium Elektronika & Instrumentasi
3 METODOLOGI PENELITIAN
 14 3 METODOLOGI PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian dilakukan dalam tiga tahap yaitu pengukuran iluminasi cahaya pada medium udara, pengoperasian bagan apung, dan pengukuran iluminasi
14 3 METODOLOGI PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian dilakukan dalam tiga tahap yaitu pengukuran iluminasi cahaya pada medium udara, pengoperasian bagan apung, dan pengukuran iluminasi
DESAIN SISTEM PENGUKURAN PERGESERAN OBJEK DENGAN TRANDUSER ULTRASONIK MENGGUNAKAN METODE KORELASI SILANG SECARA REAL TIME
 DESAIN SISTEM PENGUKURAN PERGESERAN OBJEK DENGAN TRANDUSER ULTRASONIK MENGGUNAKAN METODE KORELASI SILANG SECARA REAL TIME Ridwan Awalin, Agus Naba, D. J. Djoko Herry Santjojo Jurusan Fisika FMIPA, Universitas
DESAIN SISTEM PENGUKURAN PERGESERAN OBJEK DENGAN TRANDUSER ULTRASONIK MENGGUNAKAN METODE KORELASI SILANG SECARA REAL TIME Ridwan Awalin, Agus Naba, D. J. Djoko Herry Santjojo Jurusan Fisika FMIPA, Universitas
Sub Pokok Bahasan dan TIK
 SATUAN ACARA PERKULIAHAN TEKNIK ELEKTRO (IB) MATA KULIAH / SEMESTER : INSTRUMENTASI ELEKTRONIKA* / 7 KODE MK / SKS / SIFAT : AK041315 / 3 SKS / MK UTAMA Pertemuan Pokok Bahasan dan ke 1 Konsep-konsep memahami
SATUAN ACARA PERKULIAHAN TEKNIK ELEKTRO (IB) MATA KULIAH / SEMESTER : INSTRUMENTASI ELEKTRONIKA* / 7 KODE MK / SKS / SIFAT : AK041315 / 3 SKS / MK UTAMA Pertemuan Pokok Bahasan dan ke 1 Konsep-konsep memahami
BAB III KALIBRASI DAN VALIDASI SENSOR KAMERA UNTUK PENGEMBANGAN RUMUS POSISI TIGA DIMENSI OBYEK
 BAB III KALIBRASI DAN VALIDASI SENSOR KAMERA UNTUK PENGEMBANGAN RUMUS POSISI TIGA DIMENSI OBYEK A. Pendahuluan Latar Belakang Perhitungan posisi tiga dimensi sebuah obyek menggunakan citra stereo telah
BAB III KALIBRASI DAN VALIDASI SENSOR KAMERA UNTUK PENGEMBANGAN RUMUS POSISI TIGA DIMENSI OBYEK A. Pendahuluan Latar Belakang Perhitungan posisi tiga dimensi sebuah obyek menggunakan citra stereo telah
BAB III DESKRIPSI MASALAH
 BAB III DESKRIPSI MASALAH 3.1 Perancangan Hardware Perancangan hardware ini meliputi keseluruhan perancangan, artinya dari masukan sampai keluaran dengan menghasilkan energi panas. Dibawah ini adalah diagram
BAB III DESKRIPSI MASALAH 3.1 Perancangan Hardware Perancangan hardware ini meliputi keseluruhan perancangan, artinya dari masukan sampai keluaran dengan menghasilkan energi panas. Dibawah ini adalah diagram
BAB III METODE PENELITIAN. Elekto Medis, Politeknik Kesehatan Surabaya, dan Sekolah Luar Biasa (SLB) Tuna Rungu mulai bulan Januari 2012-Juli 2012.
 Tuna Rungu mulai bulan Januari 2012-Juli 2012.") BAB III METODE PENELITIAN 3.1 Tempat dan Waktu Penelitian Kegiatan penelitian ini dilaksanakan di Laboratorium Biofisika dan Laboratorium Instrumentasi Medis, Departemen Fisika, Fakultas Sains dan Teknologi,
BAB III METODE PENELITIAN 3.1 Tempat dan Waktu Penelitian Kegiatan penelitian ini dilaksanakan di Laboratorium Biofisika dan Laboratorium Instrumentasi Medis, Departemen Fisika, Fakultas Sains dan Teknologi,
BAB IV ANALISIS DATA PENGUKURAN JARAK MENGGUNAKAN INFRA MERAH DAN ULTRASONIK
 60 BAB IV ANALISIS DATA PENGUKURAN JARAK MENGGUNAKAN INFRA MERAH DAN ULTRASONIK 4.1 Karakteristik Infra Merah Untuk pengukuran, digunakan konversi intensitas dari fototransistor menjadi nilai tegangan
60 BAB IV ANALISIS DATA PENGUKURAN JARAK MENGGUNAKAN INFRA MERAH DAN ULTRASONIK 4.1 Karakteristik Infra Merah Untuk pengukuran, digunakan konversi intensitas dari fototransistor menjadi nilai tegangan
BAB II DASAR TEORI SISTEM PERINGATAN DINI TERHADAP TSUNAMI
 BAB II DASAR TEORI SISTEM PERINGATAN DINI TERHADAP TSUNAMI 2.1 Pengertian Tsunami Tsunami berasal dari bahasa Jepang dimana Tsu berarti pelabuhan serta Nami berarti gelombang. Tsunami merupakan gelombang
BAB II DASAR TEORI SISTEM PERINGATAN DINI TERHADAP TSUNAMI 2.1 Pengertian Tsunami Tsunami berasal dari bahasa Jepang dimana Tsu berarti pelabuhan serta Nami berarti gelombang. Tsunami merupakan gelombang
BAB III PERENCANAAN DAN REALISASI SISTEM
 42 BAB III PERENCANAAN DAN REALISASI SISTEM Pada bab ini dijelaskan pembuatan alat yang dibuat dalam proyek tugas akhir dengan judul rancang bangun sistem kontrol suhu dan kelembaban berbasis mirkrokontroler
42 BAB III PERENCANAAN DAN REALISASI SISTEM Pada bab ini dijelaskan pembuatan alat yang dibuat dalam proyek tugas akhir dengan judul rancang bangun sistem kontrol suhu dan kelembaban berbasis mirkrokontroler
KERAGAMAN SUHU DAN KECEPATAN ARUS DI SELAT MAKASSAR PERIODE JULI 2005 JUNI 2006 (Mooring INSTANT)
") KERAGAMAN SUHU DAN KECEPATAN ARUS DI SELAT MAKASSAR PERIODE JULI 2005 JUNI 2006 (Mooring INSTANT) Oleh: Ince Mochammad Arief Akbar C64102063 PROGRAM STUDI ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN
KERAGAMAN SUHU DAN KECEPATAN ARUS DI SELAT MAKASSAR PERIODE JULI 2005 JUNI 2006 (Mooring INSTANT) Oleh: Ince Mochammad Arief Akbar C64102063 PROGRAM STUDI ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN
KERAGAMAN PEMBACAAN TERMOMETER BALIK ABSTRACT
 Oseana, Volume X, Nomor 3:113-119,1985. ISSN 0216-1877 KERAGAMAN PEMBACAAN TERMOMETER BALIK oleh Dharma Arief 1 ) Idjin Suryana 1 ) dan Hadikusumah 1 ) ABSTRACT VARIATION IN REVERSING THERMOMETER READING.
Oseana, Volume X, Nomor 3:113-119,1985. ISSN 0216-1877 KERAGAMAN PEMBACAAN TERMOMETER BALIK oleh Dharma Arief 1 ) Idjin Suryana 1 ) dan Hadikusumah 1 ) ABSTRACT VARIATION IN REVERSING THERMOMETER READING.
Setelah mengikuti praktikum mata kuliah ini mahasiswa akan mampu memahami komponenkomponen
 2. Konsep-Konsep Dasar Tujuan: Setelah mengikuti praktikum mata kuliah ini mahasiswa akan mampu memahami komponenkomponen gelombang suara. Deskripsi: Praktikum ini akan meliputi beberapa kegiatan seperti:
2. Konsep-Konsep Dasar Tujuan: Setelah mengikuti praktikum mata kuliah ini mahasiswa akan mampu memahami komponenkomponen gelombang suara. Deskripsi: Praktikum ini akan meliputi beberapa kegiatan seperti:
Gambar 1 : Sistem Penempatan Elektoda [1]
![Gambar 1 : Sistem Penempatan Elektoda [1]](/thumbs/67/57703492.jpg "Gambar 1 : Sistem Penempatan Elektoda [1]") Cara Kerja EEG Rekaman EEG umumnya melalui elektroda yang diletakkan di kulit kepala atau dapat juga ditanam intra kranial. Untuk meningkatkan kontak listrik antara elektroda dan kulit kepala digunakan
Cara Kerja EEG Rekaman EEG umumnya melalui elektroda yang diletakkan di kulit kepala atau dapat juga ditanam intra kranial. Untuk meningkatkan kontak listrik antara elektroda dan kulit kepala digunakan
1.2 Tujuan. 1.3 Metodologi
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Penginderaan jauh telah menjadi sarana umum untuk mendapatkan data spasial dengan akurasi yang baik. Data dari penginderaan jauh dihasilkan dalam waktu yang relatif
BAB 1 PENDAHULUAN 1.1 Latar Belakang Penginderaan jauh telah menjadi sarana umum untuk mendapatkan data spasial dengan akurasi yang baik. Data dari penginderaan jauh dihasilkan dalam waktu yang relatif
RANCANG BANGUN UNIT KONTROL BERESOLUSI 12 Bit ALAT UKUR KETEGAKLURUSAN
 RANCANG BANGUN UNIT KONTROL BERESOLUSI 12 Bit ALAT UKUR KETEGAKLURUSAN Oleh: GRANDIS ABAS SANIRTA ( 2108 100 517 ) Dosen Pembimbing: Prof. Dr.Ing. I Made Londen Batan, M.Eng PEMBAHASAN LATAR BELAKANG PERUMUSAN
RANCANG BANGUN UNIT KONTROL BERESOLUSI 12 Bit ALAT UKUR KETEGAKLURUSAN Oleh: GRANDIS ABAS SANIRTA ( 2108 100 517 ) Dosen Pembimbing: Prof. Dr.Ing. I Made Londen Batan, M.Eng PEMBAHASAN LATAR BELAKANG PERUMUSAN
MOTOR DRIVER. Gambar 1 Bagian-bagian Robot
 ACTION TOOLS OUTPUT INFORMATION MEKANIK MOTOR MOTOR DRIVER CPU SISTEM KENDALI SENSOR Gambar 1 Bagian-bagian Robot Gambar 1 menunjukkan bagian-bagian robot secara garis besar. Tidak seluruh bagian ada pada
ACTION TOOLS OUTPUT INFORMATION MEKANIK MOTOR MOTOR DRIVER CPU SISTEM KENDALI SENSOR Gambar 1 Bagian-bagian Robot Gambar 1 menunjukkan bagian-bagian robot secara garis besar. Tidak seluruh bagian ada pada
PERANCANGAN DAN PEMBUATAN SISTEM PENGANTONGAN MATERIAL OTOMATIS BERBASIS PLC OMRON CPM 1A
 PERANCANGAN DAN PEMBUATAN SISTEM PENGANTONGAN MATERIAL OTOMATIS BERBASIS PLC OMRON CPM 1A Lovely Son* dan Septia Rinaldi Jurusan Teknik Mesin Fakultas Teknik Universitas Andalas, Padang 25163 Telp: +62
PERANCANGAN DAN PEMBUATAN SISTEM PENGANTONGAN MATERIAL OTOMATIS BERBASIS PLC OMRON CPM 1A Lovely Son* dan Septia Rinaldi Jurusan Teknik Mesin Fakultas Teknik Universitas Andalas, Padang 25163 Telp: +62
terhadap gravitasi, sehingga vektor gravitasi dapat diestimasi dan didapatkan dari pengukuran. Hasil akselerasi lalu diintregasikan untuk mendapatkan
 1 BAB I PENDAHULUAN 1.1. Latar Belakang Penelitian Pada kurun waktu yang singkat, Unmanned Aerial Vehicle (UAV) telah menarik banyak perhatian warga sipil, karena keunggulan mesin ini yang dapat berfungsi
1 BAB I PENDAHULUAN 1.1. Latar Belakang Penelitian Pada kurun waktu yang singkat, Unmanned Aerial Vehicle (UAV) telah menarik banyak perhatian warga sipil, karena keunggulan mesin ini yang dapat berfungsi
Rancang Bangun Sistem Akuisisi Data Resonansi gelombang Bunyi Menggunakan Transduser Ultrasonik Berbasis Mikrokontroler ATmega8535
 JURNAL Teori dan Aplikasi Fisika Vol. 02, No. 02, Juli 2014 Rancang Bangun Sistem Akuisisi Data Resonansi gelombang Bunyi Menggunakan Transduser Ultrasonik Berbasis Mikrokontroler ATmega8535 Nurkholis,
JURNAL Teori dan Aplikasi Fisika Vol. 02, No. 02, Juli 2014 Rancang Bangun Sistem Akuisisi Data Resonansi gelombang Bunyi Menggunakan Transduser Ultrasonik Berbasis Mikrokontroler ATmega8535 Nurkholis,
BAB III PERANCANGAN SISTEM
 31 BAB III PERANCANGAN SISTEM 3.1 Diagram Blok Air ditampung pada wadah yang nantinya akan dialirkan dengan menggunakan pompa. Pompa akan menglirkan air melalui saluran penghubung yang dibuat sedemikian
31 BAB III PERANCANGAN SISTEM 3.1 Diagram Blok Air ditampung pada wadah yang nantinya akan dialirkan dengan menggunakan pompa. Pompa akan menglirkan air melalui saluran penghubung yang dibuat sedemikian
BAB III METODE PENELITIAN. Pada penelitian ini dilakukan beberapa langkah untuk mencapai tujuan
 BAB III METODE PENELITIAN Pada penelitian ini dilakukan beberapa langkah untuk mencapai tujuan penelitian. Langkah-langkah tersebut dilukiskan melalui bagan 3.1 berikut. Menentukan prinsip kerja sistem
BAB III METODE PENELITIAN Pada penelitian ini dilakukan beberapa langkah untuk mencapai tujuan penelitian. Langkah-langkah tersebut dilukiskan melalui bagan 3.1 berikut. Menentukan prinsip kerja sistem
BAB I PENDAHULUAN. Pada suatu industri penggunaaan peralatan instrumentasi merupakan hal
 BAB I PENDAHULUAN I.1. Latar Belakang Masalah Pada suatu industri penggunaaan peralatan instrumentasi merupakan hal yang sangat penting dalam mendukung jalannya proses dalam suatu pabrik. Untuk itu peralatan
BAB I PENDAHULUAN I.1. Latar Belakang Masalah Pada suatu industri penggunaaan peralatan instrumentasi merupakan hal yang sangat penting dalam mendukung jalannya proses dalam suatu pabrik. Untuk itu peralatan
III. METODELOGI PENELITIAN. Tempat dan waktu penelitian yang telah dilakukan pada penelitian ini adalah
 III. METODELOGI PENELITIAN 3.1 Tempat dan Waktu Penelitian Tempat dan waktu penelitian yang telah dilakukan pada penelitian ini adalah sebagai berikut: 3.1.1 Tempat penelitian Penelitian dan pengambilan
III. METODELOGI PENELITIAN 3.1 Tempat dan Waktu Penelitian Tempat dan waktu penelitian yang telah dilakukan pada penelitian ini adalah sebagai berikut: 3.1.1 Tempat penelitian Penelitian dan pengambilan
Sistem Monitoring Tinggi Muka Air Sungai Terpasang di seluruh Kaltim dengan Pusat Monitor di Samarinda menggunakan komunikasi satelit RTU LOGGER
 Sistem Monitoring Tinggi Muka Air Sungai Terpasang di seluruh Kaltim dengan Pusat Monitor di Samarinda menggunakan komunikasi satelit RTU LOGGER Blok diagram Hardware RTU LOGGER Spesifikasi Teknis RTU
Sistem Monitoring Tinggi Muka Air Sungai Terpasang di seluruh Kaltim dengan Pusat Monitor di Samarinda menggunakan komunikasi satelit RTU LOGGER Blok diagram Hardware RTU LOGGER Spesifikasi Teknis RTU