SIMULASI PERILAKU AGEN OTONOM DALAM DUNIA VIRTUAL MENGGUNAKAN LOGIKA FUZZY
|
|
|
- Deddy Cahyadi
- 6 tahun lalu
- Tontonan:
Transkripsi
1 SIMULASI PERILAKU AGEN OTONOM DALAM DUNIA VIRTUAL MENGGUNAKAN LOGIKA FUZZY M. Faizal Rochman Pembimbing : Mochamad Hariadi, ST., MSc., PhD.
2 Latar Belakang Meningkatnya kebutuhan akan kecerdasan buatan dan simulasi dunia virtual (Kienzle, 2008). Komponen penting simulasi adalah pengembangan pergerakan dan perilaku agen yang mendekati keadaan sebenarnya (Lau, 2005).
3 Rumusan Masalah Bagaimana menciptakan sistem fuzzy yang menghasilkan perilaku jalan agar dinamis. Bagaimana membangun logika fuzzy untuk pengambilan keputusan agen ketika mendapat halangan.
4 Tujuan dan Manfaat Penelitian Menghasilkan perilaku jalan agen dalam dunia virtual. Menghasilkan simulasi decision making agen ketika mendapatkan halangan. Simulasi pergerakan agen akan bisa diterapkan pada bentuk dunia virtual yang berbeda.
5 Dasar Teori Simulasi : menghadirkan kondisi nyata kedalam komputer sebagai dunia virtual yang didalamnya terdapat agen. Jalan : bentuk transportasi pergerakan tubuh manusi tanpa kendaraan atau mengendarai hewan
6 Perilaku Jalan Cara, tindakan atau respon agen ketika berjalan di dunia virtual dalam mencapai tujuan yang ditetapkan dengan menghindari halangan yang ada. Dalam penelitian kali ini diambil kecepatan jalan normal adalah 3,5 mil/ jam.
7 Desain Perilaku Kemampuan agen untuk menjadi otonom didapat dari pemberian suatu set perilaku life-like. Agen dibekali dengan persepsi tentang dunianya. Fuzzy digunakan untuk pengambil keputusan kecepatan jalan dan keputusan penghindaran halangan.
8 Desain Fuzzy Kecepatan Jalan Variabel masukan dibagi 2 atribut : stamina dan keadaan. Parameter stamina : sakit, normal, sehat dan segar. Parameter keadaan : santai, normal dan buru-buru.
9 Desain Fuzzy Kecepatan Jalan Parameter keluaran kecepatan jalan didefinisi : lambat, normal, cepat dan sangat cepat. semua fungsi keanggotaan menggunakan bentuk segitiga.

10 Desain Fuzzy Kecepatan Jalan Aturan fuzzy untuk menghasilkan kecepatan jalan

11 Desain Fuzzy Kecepatan Jalan Respon fuzzy kecepatan jalan agen dalam grafik permukaan.
12 Desain Fuzzy Pergerakan Agen Terdapat dua sistem fuzzy yang dibangun : 1. fuzzy untuk menentukan besaran arah dalam potential field 2. fuzzy untuk menghasilkan keputusan arah agen.
13 Desain Fuzzy Pergerakan Agen Besaran Arah Ditetapkan 2 variabel masukan. Variabel kecepatan dengan parameter : lambat, normal, cepat dan sangat cepat. Variabel keadaan parameternya : santai, normal dan buru-buru. Untuk keluaran, parameternya : rendah, medium dan tinggi.

14 Desain Fuzzy Pergerakan Agen Besaran Arah Aturan fuzzy untuk menghasilkan besaran nilai jalan


15 Desain Fuzzy Pergerakan Agen Besaran Arah Respon fuzzy besaran arah dalam grafik permukaan.
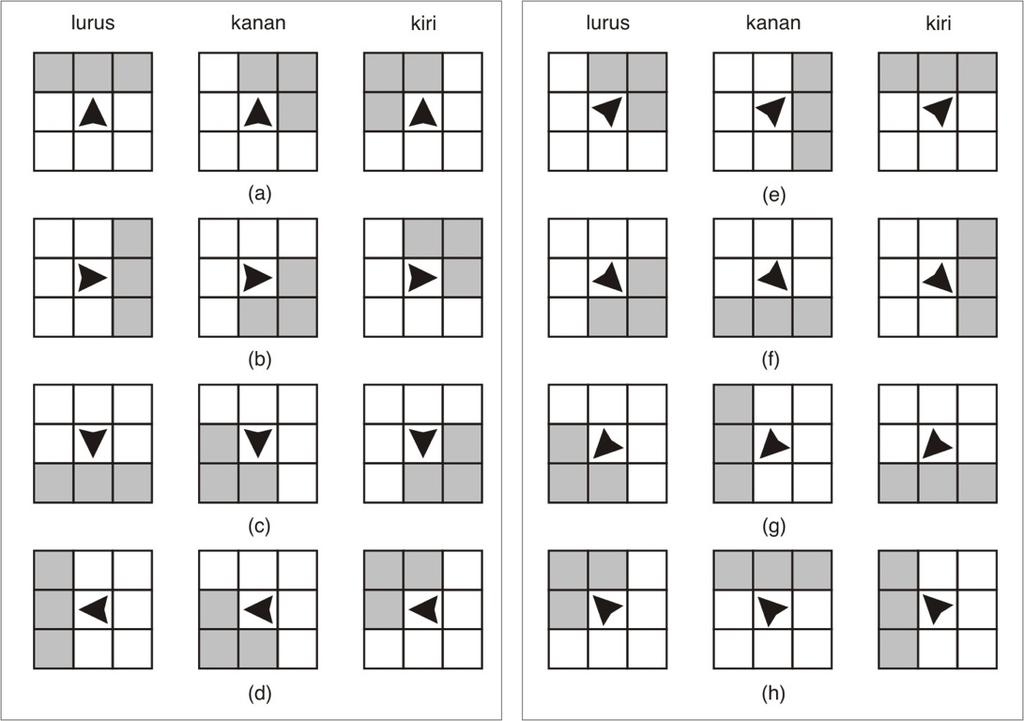
16 Desain Fuzzy Pergerakan Agen Keputusan Arah Ditentukan 2 variabel penentu : jarak dan sudut halangan. Parameter jarak : dekat, medium dan jauh. Parameter sudut halangan : lurus, kiri dan kanan

17 Desain Fuzzy Pergerakan Agen Penghitungan Jarak Jarak Agen = x 100% AT AH
18 Desain Fuzzy Pergerakan Agen Penghitungan Sudut

19 Desain Fuzzy Pergerakan Agen Keputusan Arah Aturan fuzzy untuk menghasilkan keputusan arah agen.

20 Desain Fuzzy Pergerakan Agen Keputusan Arah Respon fuzzy keputusan arah agen dalam grafik permukaan.

21 Kontrol Pengambilan Keputusan Agen

22 Hasil Simulasi

23 Hasil Simulasi

24 Grafik Perbandingan Model 1 Model 2
25 Kesimpulan Aturan fuzzy dapat diterapkan untuk menghasilkan variasi perilaku jalan dari agen dengan menggunakan aturan tertentu. Perilaku berjalan agen dalam dunia virtual (potential field) dapat bervariasi sesuai keadaan dan aturan yang diberikan pada sistem fuzzy. Untuk agen yang jalannya santai, cenderung untuk memilih jalan yang terlihat agak menjauh dari halangan. Akan tetapi ketika dilihat banyaknya langkah yang diambil, agen dengan keadaan yang santai lebih efisien. Agen yang jalannya normal terkadang mendekat atau menjauh dari halangan.
26 Kesimpulan Agen yang berjalan terburu-buru akan cenderung akan mengambil lintasan lebih jauh. Ini terbukti dengan banyaknya langkah yang ditempuh agen ketika mencapai tujuan. Dari ketiga simulasi yang telah dilakukan, agen yang terburu-buru akan terlihat lebih sulit menuju tujuannya. Dan dalam dunia nyata memang ketika orang terburuburu terkadang keputusan yang diambil tidak selalu tepat. Parameter kondisi statis yang diberikan pada agen untuk melakukan percobaan simulasi ini dapat menghasilkan perbedaan perilaku jalan agen dalam potential field.
27 Saran Agar berjalan dalam dunia virtual terlihat lebih dinamis, percobaan simulasi harus dilakukan dengan kondisi dan parameter agen juga harus dinamis/bervariasi. Tidak menutup kemungkinan bahwa dalam simulasi akan diberikan dua agen dengan kondisi dan stamina yang berbeda.
Simulasi Perilaku Agen Otonom Dalam Dunia Virtual Menggunakan Logika Fuzzy
 Simulasi Perilaku Agen Otonom Dalam Dunia Virtual Menggunakan Logika Fuzzy M. Faizal Rochman 1) Moch. Hariadi, ST., MSc., PhD. Game Technology Research Group, Department of electrical Engineering Sepuluh
Simulasi Perilaku Agen Otonom Dalam Dunia Virtual Menggunakan Logika Fuzzy M. Faizal Rochman 1) Moch. Hariadi, ST., MSc., PhD. Game Technology Research Group, Department of electrical Engineering Sepuluh
IMPLEMENTASI NON PLAYER CHARACTER PADA GAME PERTARUNGAN GALAH ASIN MENGGUNAKAN LOGIKA FUZZY
 IMPLEMENTASI NON PLAYER CHARACTER PADA GAME PERTARUNGAN GALAH ASIN MENGGUNAKAN LOGIKA FUZZY Nomo Haga A.G 1, Yulison Herry C 2, Rezki Yuniarti 3 Jurusan Informatika, Fakultas MIPA, UniversitasJenderal
IMPLEMENTASI NON PLAYER CHARACTER PADA GAME PERTARUNGAN GALAH ASIN MENGGUNAKAN LOGIKA FUZZY Nomo Haga A.G 1, Yulison Herry C 2, Rezki Yuniarti 3 Jurusan Informatika, Fakultas MIPA, UniversitasJenderal
Kendaraan Otonom Berbasis Kendali Teaching And Playback Dengan Kemampuan Menghindari Halangan
 Kendaraan Otonom Berbasis Kendali Teaching And Playback Dengan Kemampuan Menghindari Halangan Aldilla Rizki Nurfitriyani 1, Noor Cholis Basjaruddin 2, Supriyadi 3 1 Jurusan Teknik Elektro,Politeknik Negeri
Kendaraan Otonom Berbasis Kendali Teaching And Playback Dengan Kemampuan Menghindari Halangan Aldilla Rizki Nurfitriyani 1, Noor Cholis Basjaruddin 2, Supriyadi 3 1 Jurusan Teknik Elektro,Politeknik Negeri
DAFTAR ISI DAFTAR TABEL DAFTAR GAMBAR DAFTAR LAMBANG, NOTASI DAN SINGKATAN DAFTAR LAMPIRAN
 DAFTAR ISI HALAMAN PENGESAHAN ABSTRAKSI KATA PENGANTAR DAFTAR ISI DAFTAR TABEL DAFTAR GAMBAR DAFTAR LAMBANG, NOTASI DAN SINGKATAN DAFTAR LAMPIRAN i ii iii iv viii x xi xiii BAB I PENDAHULUAN 1.1 Latar
DAFTAR ISI HALAMAN PENGESAHAN ABSTRAKSI KATA PENGANTAR DAFTAR ISI DAFTAR TABEL DAFTAR GAMBAR DAFTAR LAMBANG, NOTASI DAN SINGKATAN DAFTAR LAMPIRAN i ii iii iv viii x xi xiii BAB I PENDAHULUAN 1.1 Latar
UKDW BAB I PENDAHULUAN. 1.1 Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah NPC (Non-Player-Character) pada aplikasi permainan video merupakan pemain yang tidak dikendalikan oleh manusia. Dalam permainan video, NPC diprogram untuk melakukan
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah NPC (Non-Player-Character) pada aplikasi permainan video merupakan pemain yang tidak dikendalikan oleh manusia. Dalam permainan video, NPC diprogram untuk melakukan
BAB IV HASIL PENGUJIAN DAN ANALISIS
 BAB IV HASIL PENGUJIAN DAN ANALISIS Pada bab ini akan dijelaskan metode pengujian peforma navigasi robot, hasil pengujian robot, perbandingan metode kontrol fuzzy dengan metode kontrol Propotional Derivative
BAB IV HASIL PENGUJIAN DAN ANALISIS Pada bab ini akan dijelaskan metode pengujian peforma navigasi robot, hasil pengujian robot, perbandingan metode kontrol fuzzy dengan metode kontrol Propotional Derivative
BAB 1 PENDAHULUAN 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Beberapa tahun terakhir ini, terlihat perkembangan penelitian yang pesat pada berbagai bidang ilmu komputer, dan penggunaan ilmu komputer pada kendaraan telah mencapai
BAB 1 PENDAHULUAN 1.1 Latar Belakang Beberapa tahun terakhir ini, terlihat perkembangan penelitian yang pesat pada berbagai bidang ilmu komputer, dan penggunaan ilmu komputer pada kendaraan telah mencapai
Analisis Simpang Bersinyal Metode Webster. Dr. Gito Sugiyanto, S.T., M.T. ARUS JENUH
 // REKAYASA LALU LINTAS TKS 6 Analisis Simpang Bersinyal Metode Webster Dr. Gito Sugiyanto, S.T., M.T. ARUS JENUH Lebar pendekat Gradien Komposisi kendaraan Kendaraan belok kanan Kendaraan belok kiri Pejalan
// REKAYASA LALU LINTAS TKS 6 Analisis Simpang Bersinyal Metode Webster Dr. Gito Sugiyanto, S.T., M.T. ARUS JENUH Lebar pendekat Gradien Komposisi kendaraan Kendaraan belok kanan Kendaraan belok kiri Pejalan
BAB I PENDAHULUAN. pertahanan keamanan. Pertumbuhan sektor ini akan mencerminkan pertumbuhan
 BAB I PENDAHULUAN 1.1 Latar Belakang Sektor transportasi merupakan salah satu mata rantai jaringan distribusi barang dan penumpang yang telah berkembang sangat dinamis serta berperan di dalam menunjang
BAB I PENDAHULUAN 1.1 Latar Belakang Sektor transportasi merupakan salah satu mata rantai jaringan distribusi barang dan penumpang yang telah berkembang sangat dinamis serta berperan di dalam menunjang
GERAK LURUS Kedudukan
 GERAK LURUS Gerak merupakan perubahan posisi (kedudukan) suatu benda terhadap sebuah acuan tertentu. Perubahan letak benda dilihat dengan membandingkan letak benda tersebut terhadap suatu titik yang diangggap
GERAK LURUS Gerak merupakan perubahan posisi (kedudukan) suatu benda terhadap sebuah acuan tertentu. Perubahan letak benda dilihat dengan membandingkan letak benda tersebut terhadap suatu titik yang diangggap
DESAIN AUGMENTED REALITY ORIGAMI BERBASIS METODE LOGIKA FUZZY
 DESAIN AUGMENTED REALITY ORIGAMI BERBASIS METODE LOGIKA FUZZY CACIK SUCI ASTUTI (2209205211) DOSEN PEMBIMBING : Mochammad Hariadi, ST, MSc, PhD. Christyowidiasmoro, ST, MT Pendahuluan Pembelajaran Origami
DESAIN AUGMENTED REALITY ORIGAMI BERBASIS METODE LOGIKA FUZZY CACIK SUCI ASTUTI (2209205211) DOSEN PEMBIMBING : Mochammad Hariadi, ST, MSc, PhD. Christyowidiasmoro, ST, MT Pendahuluan Pembelajaran Origami
PEMODELAN SISTEM. Pemodelan & simulasi TM04
 PEMODELAN SISTEM Pemodelan & simulasi TM04 Pemodelan untuk permasalahan apa? Mengetahui tinggi menara Pisa tanpa mengukur secara langsung, Mengetahui lebar sebuah sungai tanpa benar-benar menyeberanginya,
PEMODELAN SISTEM Pemodelan & simulasi TM04 Pemodelan untuk permasalahan apa? Mengetahui tinggi menara Pisa tanpa mengukur secara langsung, Mengetahui lebar sebuah sungai tanpa benar-benar menyeberanginya,
PERANCANGAN SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS BERBASIS LOGIKA FUZZY MENGGUNAKAN SENSOR KAMERA
 Seminar Tugas Akhir PERANCANGAN SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS BERBASIS LOGIKA FUZZY MENGGUNAKAN SENSOR KAMERA Oleh : Andri Kuncoro NRP. 2406100042 Dosen Pembimbing : Ir. Moch. Ilyas Hs. NIP.194909191979031002
Seminar Tugas Akhir PERANCANGAN SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS BERBASIS LOGIKA FUZZY MENGGUNAKAN SENSOR KAMERA Oleh : Andri Kuncoro NRP. 2406100042 Dosen Pembimbing : Ir. Moch. Ilyas Hs. NIP.194909191979031002
DAFTAR ISI ABSTRAK KATA PENGANTAR UCAPAN TERIMA KASIH
 DAFTAR ISI ABSTRAK i KATA PENGANTAR iii UCAPAN TERIMA KASIH iv DAFTAR ISI v DAFTAR TABEL vii DAFTAR GAMBAR viii BAB I PENDAHULUAN 1 1.1 Latar Belakang 1 1.2 Rumusan Masalah 3 1.3 Tujuan Penelitian 3 1.4
DAFTAR ISI ABSTRAK i KATA PENGANTAR iii UCAPAN TERIMA KASIH iv DAFTAR ISI v DAFTAR TABEL vii DAFTAR GAMBAR viii BAB I PENDAHULUAN 1 1.1 Latar Belakang 1 1.2 Rumusan Masalah 3 1.3 Tujuan Penelitian 3 1.4
OCKY NOOR HILLALI
 OCKY NOOR HILLALI 2407100045 Dosen Pembimbing I: Dr. Ir. AULIA SITI AISJAH, MT Dosen Pembimbing II: Dr. Ir. AGOES A. MASROERI, M. Eng JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI
OCKY NOOR HILLALI 2407100045 Dosen Pembimbing I: Dr. Ir. AULIA SITI AISJAH, MT Dosen Pembimbing II: Dr. Ir. AGOES A. MASROERI, M. Eng JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI
BAB 2 TINJAUAN PUSTAKA
 4 BAB 2 TINJAUAN PUSTAKA 2. 1. Fuzzy Logic Fuzzy logic pertama kali dikembangkan oleh Lotfi A. Zadeh pada tahun 1965. Teori ini banyak diterapkan di berbagai bidang, antara lain representasi pikiran manusia
4 BAB 2 TINJAUAN PUSTAKA 2. 1. Fuzzy Logic Fuzzy logic pertama kali dikembangkan oleh Lotfi A. Zadeh pada tahun 1965. Teori ini banyak diterapkan di berbagai bidang, antara lain representasi pikiran manusia
STRATEGI MENYERANG NPC GAME FPS MENGGUNAKAN FUZZY FINITE STATE MACHINE Ady Wicaksono 1), Mochamad Hariadi 2), Supeno Mardi S. N 3)
, Mochamad Hariadi 2), Supeno Mardi S. N 3)") STRATEGI MENYERANG NPC GAME FPS MENGGUNAKAN FUZZY FINITE STATE MACHINE Ady Wicaksono 1), Mochamad Hariadi 2), Supeno Mardi S. N 3) 1) Pasca Sarjana Teknik Elektro ITS, Surabaya 60111 2) Jurusan Teknik
STRATEGI MENYERANG NPC GAME FPS MENGGUNAKAN FUZZY FINITE STATE MACHINE Ady Wicaksono 1), Mochamad Hariadi 2), Supeno Mardi S. N 3) 1) Pasca Sarjana Teknik Elektro ITS, Surabaya 60111 2) Jurusan Teknik
SMP kelas 9 - FISIKA BAB 6. GERAK, GAYA DAN HUKUM NEWTONLatihan Soal 6.1
 SMP kelas 9 - FISIKA BAB 6. GERAK, GAYA DAN HUKUM NEWTONLatihan Soal 6.1 1. Seorang anak meluncur maju di jalan seperti pada gambar berikut tanpa mengayuh pedal sepedanya. Jenis gerak lurus berubah beraturan
SMP kelas 9 - FISIKA BAB 6. GERAK, GAYA DAN HUKUM NEWTONLatihan Soal 6.1 1. Seorang anak meluncur maju di jalan seperti pada gambar berikut tanpa mengayuh pedal sepedanya. Jenis gerak lurus berubah beraturan
BAB II LANDASAN TEORI. Pada bab ini berisi tentang teori mengenai permasalahan yang akan dibahas
 BAB II LANDASAN TEORI Pada bab ini berisi tentang teori mengenai permasalahan yang akan dibahas dalam pembuatan tugas akhir ini. Secara garis besar teori penjelasan akan dimulai dari definisi logika fuzzy,
BAB II LANDASAN TEORI Pada bab ini berisi tentang teori mengenai permasalahan yang akan dibahas dalam pembuatan tugas akhir ini. Secara garis besar teori penjelasan akan dimulai dari definisi logika fuzzy,
BAB I PENDAHULUAN 1.1 Latar Belakang
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Dalam menunjang produktivitas pekerjaan, manusia telah lama menginginkan sebuah asisten pribadi yang mampu melakukan beberapa tugas. Asisten berupa robot otomatis
1 BAB I PENDAHULUAN 1.1 Latar Belakang Dalam menunjang produktivitas pekerjaan, manusia telah lama menginginkan sebuah asisten pribadi yang mampu melakukan beberapa tugas. Asisten berupa robot otomatis
BAB III METODOLOGI 3.1. PENDAHULUAN
 BAB III METODOLOGI 3.1. PENDAHULUAN Dalam melakukan studi Tugas Akhir diperlukan metodologi yang akan digunakan agar studi ini dapat berjalan sesuai dengan koridor yang telah direncanakan di awal. Dalam
BAB III METODOLOGI 3.1. PENDAHULUAN Dalam melakukan studi Tugas Akhir diperlukan metodologi yang akan digunakan agar studi ini dapat berjalan sesuai dengan koridor yang telah direncanakan di awal. Dalam
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas perancangan serta penerapan pengendalian berbasis logika fuzzy pada sistem Fuzzy Logic Sebagai Kendali Pendingin Ruangan Menggunakan MATLAB. Dan simulasi
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas perancangan serta penerapan pengendalian berbasis logika fuzzy pada sistem Fuzzy Logic Sebagai Kendali Pendingin Ruangan Menggunakan MATLAB. Dan simulasi
TEKNIK LALU LINTAS MATERI PERKULIAHAN. Simpang ber-apill (Alat Pengatur Isyarat Lalu Lintas)
") TEKNIK LALU LINTAS Dr.Eng. Muhammad Zudhy Irawan, S.T., M.T. MATERI PERKULIAHAN Pengantar: Simpang Simpang tanpa APILL (Alat Pengatur Isyarat Lalu Lintas) Simpang ber-apill (Alat Pengatur Isyarat Lalu
TEKNIK LALU LINTAS Dr.Eng. Muhammad Zudhy Irawan, S.T., M.T. MATERI PERKULIAHAN Pengantar: Simpang Simpang tanpa APILL (Alat Pengatur Isyarat Lalu Lintas) Simpang ber-apill (Alat Pengatur Isyarat Lalu
Perpustakaan Unika SKALA DISIPLIN
 SKALA DISIPLIN 1. 2. 3. 4. 5. 6. 7. 8. Bila melanggar rambu-rambu lalu lintas, saya siap ditindak. Saya akan memaki-maki pengendara lain jika tiba-tiba memotong jalan saya. Menurut saya penggunaan lampu
SKALA DISIPLIN 1. 2. 3. 4. 5. 6. 7. 8. Bila melanggar rambu-rambu lalu lintas, saya siap ditindak. Saya akan memaki-maki pengendara lain jika tiba-tiba memotong jalan saya. Menurut saya penggunaan lampu
WEAVING SECTION. Definisi dan Istilah 5/11/2012. Civil Engineering Diploma Program Vocational School Gadjah Mada University. Nursyamsu Hidayat, Ph.D.
 Civil Engineering Diploma Program Vocational School Gadjah Mada University WEAVING SECTION Nursyamsu Hidayat, Ph.D. Definisi dan Istilah Kondisi Geometrik Bagian jalinan bundaran Bagian jalinan pada bundaran
Civil Engineering Diploma Program Vocational School Gadjah Mada University WEAVING SECTION Nursyamsu Hidayat, Ph.D. Definisi dan Istilah Kondisi Geometrik Bagian jalinan bundaran Bagian jalinan pada bundaran
Apabila lintasan itu dinyatakan dengan satuan s, maka persamaan di atas dapat juga ditulis menjadi :
 Gerak pada ruang Bila suatu titk zat bergerak, maka titik zat akan membuat lintasan dalam ruang geometri. Lintasan ini merupakan garis atau umumnya merupakan perpotongan dua bidang dalam ruang. Pada koordinat.
Gerak pada ruang Bila suatu titk zat bergerak, maka titik zat akan membuat lintasan dalam ruang geometri. Lintasan ini merupakan garis atau umumnya merupakan perpotongan dua bidang dalam ruang. Pada koordinat.
PEMBELAJARAN BERLALU LINTAS MELALUI GAME BERBASIS VIRTUAL REALITY
 LAPORAN TUGAS AKHIR PEMBELAJARAN BERLALU LINTAS MELALUI GAME BERBASIS VIRTUAL REALITY Disusun oleh : ANDRU DEVA LUKITO 13.07.0008 PROGRAM STUDI SISTEM INFORMASI FAKULTAS ILMU KOMPUTER UNIVERSITAS KATOLIK
LAPORAN TUGAS AKHIR PEMBELAJARAN BERLALU LINTAS MELALUI GAME BERBASIS VIRTUAL REALITY Disusun oleh : ANDRU DEVA LUKITO 13.07.0008 PROGRAM STUDI SISTEM INFORMASI FAKULTAS ILMU KOMPUTER UNIVERSITAS KATOLIK
BAB II TINJAUAN PUSTAKA. kuantitatif yang menerangkan kondisi operasional fasilitas simpang dan secara
 BAB II TINJAUAN PUSTAKA Kinerja suatu simpang menurut MKJI 1997 didefinisikan sebagai ukuran kuantitatif yang menerangkan kondisi operasional fasilitas simpang dan secara umum dinyatakan dalam kapasitas
BAB II TINJAUAN PUSTAKA Kinerja suatu simpang menurut MKJI 1997 didefinisikan sebagai ukuran kuantitatif yang menerangkan kondisi operasional fasilitas simpang dan secara umum dinyatakan dalam kapasitas
Spesifikasi kereb beton untuk jalan
 Standar Nasional Indonesia Spesifikasi kereb beton untuk jalan ICS 91.100.30 Badan Standardisasi Nasional Daftar isi Daftar isi...i Prakata... iii Pendahuluan...iv 1 Ruang lingkup...1 2 Acuan normatif...1
Standar Nasional Indonesia Spesifikasi kereb beton untuk jalan ICS 91.100.30 Badan Standardisasi Nasional Daftar isi Daftar isi...i Prakata... iii Pendahuluan...iv 1 Ruang lingkup...1 2 Acuan normatif...1
ANALISIS SIMPANG BERSINYAL MENGGUNAKAN LOGIKA FUZZY
 ANALISIS SIMPANG BERSINYAL MENGGUNAKAN LOGIKA FUZZY TUGAS AKHIR SEBAGAI SALAH SATU SYARAT UNTUK MENYELESAIKAN PENDIDIKAN SARJANA TEKNIK DI PROGRAM STUDI TEKNIK SIPIL oleh ACHMAD AFANDI 150 03 006 ALEX
ANALISIS SIMPANG BERSINYAL MENGGUNAKAN LOGIKA FUZZY TUGAS AKHIR SEBAGAI SALAH SATU SYARAT UNTUK MENYELESAIKAN PENDIDIKAN SARJANA TEKNIK DI PROGRAM STUDI TEKNIK SIPIL oleh ACHMAD AFANDI 150 03 006 ALEX
BAB III LANDASAN TEORI. direncanakan adalah dudukan seperti ditunjukkan pada Gambar 3.1.
 BAB III LANDASAN TEORI 3.1 Dudukan Rencana Dudukan memiliki bentuk menyilang (X). Bentuk menyilang diperoleh dari analogi terhadap gunting. Cara kerja gunting yang menyilang dirasa bisa digunakan di jembatan,
BAB III LANDASAN TEORI 3.1 Dudukan Rencana Dudukan memiliki bentuk menyilang (X). Bentuk menyilang diperoleh dari analogi terhadap gunting. Cara kerja gunting yang menyilang dirasa bisa digunakan di jembatan,
BAB I PENDAHULUAN Latar Belakang
 BAB I PENDAHULUAN 1. 1. Latar Belakang Seiring dengan perkembangan zaman, teknologi di bidang transportasi terus berkembang pesat. Hal ini ditandai dengan bermunculannya kendaraan yang modern dan praktis
BAB I PENDAHULUAN 1. 1. Latar Belakang Seiring dengan perkembangan zaman, teknologi di bidang transportasi terus berkembang pesat. Hal ini ditandai dengan bermunculannya kendaraan yang modern dan praktis
IMPLEMENTASI KONSEP KECERDASAN BUATAN DALAM RANCANG BANGUN GAME BRICK BREAKER SKRIPSI WULAN AYUNI
 IMPLEMENTASI KONSEP KECERDASAN BUATAN DALAM RANCANG BANGUN GAME BRICK BREAKER SKRIPSI WULAN AYUNI 091421050 PROGRAM STUDI S-1 EKSTENSI ILMU KOMPUTER DEPARTEMEN ILMU KOMPUTER FAKULTAS MATEMATIKA DAN ILMU
IMPLEMENTASI KONSEP KECERDASAN BUATAN DALAM RANCANG BANGUN GAME BRICK BREAKER SKRIPSI WULAN AYUNI 091421050 PROGRAM STUDI S-1 EKSTENSI ILMU KOMPUTER DEPARTEMEN ILMU KOMPUTER FAKULTAS MATEMATIKA DAN ILMU
INFORMASI KEHIDUPAN BERBAGAI BAHASA
 4 Peraturan Lalu Lintas 4-1 Peraturan Lalu Lintas Di Jepang pejalan kaki, mobil,motor, sepeda dan lain-lain, masing-masing peraturan lalu lintas telah ditentukan. Cepatlah mengingat peraturan lalu lintas
4 Peraturan Lalu Lintas 4-1 Peraturan Lalu Lintas Di Jepang pejalan kaki, mobil,motor, sepeda dan lain-lain, masing-masing peraturan lalu lintas telah ditentukan. Cepatlah mengingat peraturan lalu lintas
3 METODOLOGI PENELITIAN
 3 METODOLOGI PENELITIAN 3.1 Kerangka Pemikiran Kerangka pemikiran dalam penelitian ini terbagi dalam beberapa tahap yang dimulai dari analisa hingga hasil penelitian, seperti diilustrasikan dalam Gambar
3 METODOLOGI PENELITIAN 3.1 Kerangka Pemikiran Kerangka pemikiran dalam penelitian ini terbagi dalam beberapa tahap yang dimulai dari analisa hingga hasil penelitian, seperti diilustrasikan dalam Gambar
BAB I PENDAHULUAN. Robot dapat didefenisikan sebagai mesin yang terlihat seperti manusia dan
 BAB I PENDAHULUAN 1.1 Latar belakang Dalam pemenuhan kebutuhan saat sekarang ini, manusia senantiasa dituntut untuk melakukan inovasi untuk menghasilkan sebuah teknologi yang bisa memudahkan dalam pemenuhan
BAB I PENDAHULUAN 1.1 Latar belakang Dalam pemenuhan kebutuhan saat sekarang ini, manusia senantiasa dituntut untuk melakukan inovasi untuk menghasilkan sebuah teknologi yang bisa memudahkan dalam pemenuhan
BAB I PENDAHULUAN. Kota Yogyakarta merupakan kota pendidikan dan wisata. Dengan. meningkatnya populasi penduduk di kota Yogyakarta mengakibatkan
 BAB I PENDAHULUAN 1.1. Latar Belakang Kota Yogyakarta merupakan kota pendidikan dan wisata. Dengan meningkatnya populasi penduduk di kota Yogyakarta mengakibatkan bertambahnya jumlah pengendara baik pengendara
BAB I PENDAHULUAN 1.1. Latar Belakang Kota Yogyakarta merupakan kota pendidikan dan wisata. Dengan meningkatnya populasi penduduk di kota Yogyakarta mengakibatkan bertambahnya jumlah pengendara baik pengendara
BAB III LANDASAN TEORI
 BAB III LANDASAN TEORI 3.1 Volume Kendaraan Bermotor Volume lalu lintas menunjukan jumlah kendaraan yang melintasi satu titik pengamatan dalam satu satuan waktu (hari, jam, menit). Sehubungan dengan penentuan
BAB III LANDASAN TEORI 3.1 Volume Kendaraan Bermotor Volume lalu lintas menunjukan jumlah kendaraan yang melintasi satu titik pengamatan dalam satu satuan waktu (hari, jam, menit). Sehubungan dengan penentuan
BAB I PENDAHULUAN. 1.1 Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Transportasi telah menjadi salah satu kebutuhan penting dalam kegiatan sehari-hari di kehidupan bermasyarakat. Kemajuan teknologi informasi yang ada sekarang,
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Transportasi telah menjadi salah satu kebutuhan penting dalam kegiatan sehari-hari di kehidupan bermasyarakat. Kemajuan teknologi informasi yang ada sekarang,
Modul 2 Elektromagnetika Telekomunikasi Medan Berubah Terhadap Waktu dan Persamaan Maxwell
 Revisi Februari 2002 EE 2053 Modul 2 Elektromagnetika Telekomunikasi Medan Berubah Terhadap Oleh : driansyah, ST Organisasi Modul 2 Medan Berubah Terhadap Waktu dan Persamaan Maxwell A. Persamaan Maxwell
Revisi Februari 2002 EE 2053 Modul 2 Elektromagnetika Telekomunikasi Medan Berubah Terhadap Oleh : driansyah, ST Organisasi Modul 2 Medan Berubah Terhadap Waktu dan Persamaan Maxwell A. Persamaan Maxwell
BAB I PENDAHULUAN. dilaluinya. Optika merupakan kajian yang wajib dilalui oleh mahasiswa serta
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Optika mempelajari sifat-sifat cahaya dan interaksi dengan medium yang dilaluinya. Optika merupakan kajian yang wajib dilalui oleh mahasiswa serta salah satu mata
1 BAB I PENDAHULUAN 1.1 Latar Belakang Optika mempelajari sifat-sifat cahaya dan interaksi dengan medium yang dilaluinya. Optika merupakan kajian yang wajib dilalui oleh mahasiswa serta salah satu mata
BAB IV PENGUJIAN ROBOT
 BAB IV 4.1 Umum PENGUJIAN ROBOT Setelah melalui tahap perancangan mekanik, elektrik dan pemrograman seluruh perangkat robot, maka tahap berikutnya dalah tahap pengujian dari seluruh pembentuk robot secara
BAB IV 4.1 Umum PENGUJIAN ROBOT Setelah melalui tahap perancangan mekanik, elektrik dan pemrograman seluruh perangkat robot, maka tahap berikutnya dalah tahap pengujian dari seluruh pembentuk robot secara
GLB dan GLBB LEMBAR KERJA PESERTA DIDIK. LKS Berbasis Discov ery Kelas X
 A X s w a B e r b a s Ke r j a S i i s D i s co ba r ve ry L me Kelas Huk umne nowt, Gerak Lurus I. Gerak Lurus Beraturab (GLB) Suatu benda melakukan gerak, bila benda tersebut kedudukannya (jaraknya)
A X s w a B e r b a s Ke r j a S i i s D i s co ba r ve ry L me Kelas Huk umne nowt, Gerak Lurus I. Gerak Lurus Beraturab (GLB) Suatu benda melakukan gerak, bila benda tersebut kedudukannya (jaraknya)
BAB I PENDAHULUAN. instansi swasta, pemerintahan, pendidikkan, dan perbelanjaan yang memiliki
 1 BAB I PENDAHULUAN 1.1. Latar Belakang Simpang merupakan zona tempat terjadinya konflik pertemuan arah kendaraan dan memastikan menurunnya kinerja simpang diantaranya penurunan kecepatan, peningkatan
1 BAB I PENDAHULUAN 1.1. Latar Belakang Simpang merupakan zona tempat terjadinya konflik pertemuan arah kendaraan dan memastikan menurunnya kinerja simpang diantaranya penurunan kecepatan, peningkatan
SIMULASI SISTEM UNTUK PENGONTROLAN LAMPU DAN AIR CONDITIONER DENGAN MENGGUNAKAN LOGIKA FUZZY
 SIMULASI SISTEM UNTUK PENGONTROLAN LAMPU DAN AIR CONDITIONER DENGAN MENGGUNAKAN LOGIKA FUZZY Nesi Syafitri. N Teknik Informatika, Fakultas Teknik Universitas Islam Riau, Jalan Kaharuddin Nasution No. 3,
SIMULASI SISTEM UNTUK PENGONTROLAN LAMPU DAN AIR CONDITIONER DENGAN MENGGUNAKAN LOGIKA FUZZY Nesi Syafitri. N Teknik Informatika, Fakultas Teknik Universitas Islam Riau, Jalan Kaharuddin Nasution No. 3,
Gambar 5.1. Geometrik Tinjauan Titik I Lokasi Penelitian.
 BAB V ANALISIS DAN PEMBAHASAN A. Kondisi Ruas Jalan Lingkar Selatan Jalan Lingkar Selatan, Tamantirto, Kasihan, Bantul, Yogyakarta, depan kampus terpadu Universitas Muhammadiyah Yogyakarta merupakan jalan
BAB V ANALISIS DAN PEMBAHASAN A. Kondisi Ruas Jalan Lingkar Selatan Jalan Lingkar Selatan, Tamantirto, Kasihan, Bantul, Yogyakarta, depan kampus terpadu Universitas Muhammadiyah Yogyakarta merupakan jalan
LOGIKA FUZZY FUNGSI KEANGGOTAAN
 LOGIKA FUZZY FUNGSI KEANGGOTAAN FUNGSI KEANGGOTAAN (Membership function) adalah suatu kurva yang menunjukkan pemetaan titik-titik input data ke dalam nilai/derajat keanggotaannya yang memiliki interval
LOGIKA FUZZY FUNGSI KEANGGOTAAN FUNGSI KEANGGOTAAN (Membership function) adalah suatu kurva yang menunjukkan pemetaan titik-titik input data ke dalam nilai/derajat keanggotaannya yang memiliki interval
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api
 Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
Purwarupa Sistem Kendali Kecepatan Mobil Berdasarkan Jarak dengan Sistem Inferensi Fuzzy Tsukamoto
 IJEIS, Vol.3, No.2, October 2013, pp. 117~126 ISSN: 2088-3714 117 Purwarupa Sistem Kendali Kecepatan Mobil Berdasarkan Jarak dengan Sistem Inferensi Fuzzy Tsukamoto Niko Karis Gunawan* 1, Abdul Rouf 2
IJEIS, Vol.3, No.2, October 2013, pp. 117~126 ISSN: 2088-3714 117 Purwarupa Sistem Kendali Kecepatan Mobil Berdasarkan Jarak dengan Sistem Inferensi Fuzzy Tsukamoto Niko Karis Gunawan* 1, Abdul Rouf 2
Percepatan rata-rata didefinisikan sebagai perubahan kecepatan dibagi waktu yang diperlukan untuk perubahan tersebut.
 PERCEPATAN Sebuah benda yang kecepatannya berubah tiap satuan waktu dikatakan mengalami percepatan. Sebuah mobil yang kecepatannya diperbesar dari nol sampai 90 km/jam berarti dipercepat. Apabila sebuah
PERCEPATAN Sebuah benda yang kecepatannya berubah tiap satuan waktu dikatakan mengalami percepatan. Sebuah mobil yang kecepatannya diperbesar dari nol sampai 90 km/jam berarti dipercepat. Apabila sebuah
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI Bab II ini menjelaskan tentang teori-teori pendukung yang digunakan untuk pembahasan selanjutnya yaitu sistem persamaan linear sistem persamaan linear kompleks dekomposisi Doolittle
BAB II LANDASAN TEORI Bab II ini menjelaskan tentang teori-teori pendukung yang digunakan untuk pembahasan selanjutnya yaitu sistem persamaan linear sistem persamaan linear kompleks dekomposisi Doolittle
Latihan Soal Gerak pada Benda dan Kunci No Soal Jawaban 1 Perhatikan gambar di bawah ini!
 Latihan Soal Gerak pada Benda dan Kunci No Soal Jawaban 1 Perhatikan gambar di bawah ini! Gambarlah resultan gaya pada ketiga balok di atas! 2 Perhatikan gambar di bawah ini! a. Berapakah jarak yang ditempuh
Latihan Soal Gerak pada Benda dan Kunci No Soal Jawaban 1 Perhatikan gambar di bawah ini! Gambarlah resultan gaya pada ketiga balok di atas! 2 Perhatikan gambar di bawah ini! a. Berapakah jarak yang ditempuh
Kajian Kinerja Bagian Jalinan (Studi Kasus : Jl. Niaga 1 Jl. Yos Sudarso, Kota Tarakan)
") Borneo Engineering: Jurnal Teknik Sipil Vol. 1 No. 2 Desember 2017 ISSN 2581-1134 (Online) Kajian Kinerja Bagian Jalinan (Studi Kasus : Jl. Niaga 1 Jl. Yos Sudarso, Kota Tarakan) Iif Ahmad Syarif 1, Noerman
Borneo Engineering: Jurnal Teknik Sipil Vol. 1 No. 2 Desember 2017 ISSN 2581-1134 (Online) Kajian Kinerja Bagian Jalinan (Studi Kasus : Jl. Niaga 1 Jl. Yos Sudarso, Kota Tarakan) Iif Ahmad Syarif 1, Noerman
BAB II TINJAUAN PUSTAKA
 7 BAB II TINJAUAN PUSTAKA 2.1 Simpang Persimpangan merupakan bagian yang tidak terpisahkan dari semua sistem jalan. Ketika berkendara di dalam kota, orang dapat melihat bahwa kebanyakan jalan di daerah
7 BAB II TINJAUAN PUSTAKA 2.1 Simpang Persimpangan merupakan bagian yang tidak terpisahkan dari semua sistem jalan. Ketika berkendara di dalam kota, orang dapat melihat bahwa kebanyakan jalan di daerah
Penerapan Himpunan Fuzzy Untuk Sistem Pendukung Keputusan Pemilihan Telephone Cellular
 Jurnal Informatika Mulawarman Vol 6 No. 1 Febuari 2011 39 Penerapan Himpunan Fuzzy Untuk Sistem Pendukung Keputusan Pemilihan Telephone Cellular HAMDANI Program Studi Ilmu Komputer, FMIPA Universitas Mulawarman
Jurnal Informatika Mulawarman Vol 6 No. 1 Febuari 2011 39 Penerapan Himpunan Fuzzy Untuk Sistem Pendukung Keputusan Pemilihan Telephone Cellular HAMDANI Program Studi Ilmu Komputer, FMIPA Universitas Mulawarman
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA) REPRESENTASI EMOSI MENGGUNAKAN LOGIKA FUZZY PADA PERMAINAN BONNY S TOOTH BOOTH
 REPRESENTASI EMOSI MENGGUNAKAN LOGIKA FUZZY PADA PERMAINAN BONNY S TOOTH BOOTH") 68 REPRESENTASI EMOSI MENGGUNAKAN LOGIKA FUZZY PADA PERMAINAN BONNY S TOOTH BOOTH Septiani Nur Hasanah 1, Nelly Indriani Widiastuti 2 Program Studi Teknik Informatika. Universitas Komputer Indonesia. Jl.
68 REPRESENTASI EMOSI MENGGUNAKAN LOGIKA FUZZY PADA PERMAINAN BONNY S TOOTH BOOTH Septiani Nur Hasanah 1, Nelly Indriani Widiastuti 2 Program Studi Teknik Informatika. Universitas Komputer Indonesia. Jl.
BAB 1 PENDAHULUAN Latar Belakang Masalah
 BAB 1 PENDAHULUAN 1.1. Latar Belakang Masalah Pengembang atau developer perumahan selaku koordinator pelaksana di lapangan perlu diiringi oleh perkembangan teknologi komputer untuk dapat memenuhi kebutuhan
BAB 1 PENDAHULUAN 1.1. Latar Belakang Masalah Pengembang atau developer perumahan selaku koordinator pelaksana di lapangan perlu diiringi oleh perkembangan teknologi komputer untuk dapat memenuhi kebutuhan
BAB II LANDASAN TEORI. papernya yang monumental Fuzzy Set (Nasution, 2012). Dengan
. Dengan") BAB II LANDASAN TEORI 2.. Logika Fuzzy Fuzzy set pertama kali diperkenalkan oleh Prof. Lotfi Zadeh, 965 orang Iran yang menjadi guru besar di University of California at Berkeley dalam papernya yang monumental
BAB II LANDASAN TEORI 2.. Logika Fuzzy Fuzzy set pertama kali diperkenalkan oleh Prof. Lotfi Zadeh, 965 orang Iran yang menjadi guru besar di University of California at Berkeley dalam papernya yang monumental
PERILAKU OTONOM DAN ADAPTIF NON PLAYER CHARACTER MUSUH PADA GAME 3 DIMENSI MENGGUNAKAN FUZZY STATE MACHINE DAN RULE BASED SYSTEM
 PERILAKU OTONOM DAN ADAPTIF NON PLAYER CHARACTER MUSUH PADA GAME 3 DIMENSI MENGGUNAKAN FUZZY STATE MACHINE DAN RULE BASED SYSTEM Fahrul Pradhana Putra 1, Ahmad Zainul Fanani 2,Moch. Hariadi 3 1 Magister
PERILAKU OTONOM DAN ADAPTIF NON PLAYER CHARACTER MUSUH PADA GAME 3 DIMENSI MENGGUNAKAN FUZZY STATE MACHINE DAN RULE BASED SYSTEM Fahrul Pradhana Putra 1, Ahmad Zainul Fanani 2,Moch. Hariadi 3 1 Magister
SATUAN ACARA PERKULIAHAN ( SAP ) Mata Kuliah : Rekayasa Lalulintas Kode : CES 5353 Semester : V Waktu : 1 x 2 x 50 menit Pertemuan : 4 (Empat)
 Mata Kuliah : Rekayasa Lalulintas Kode : CES 5353 Semester : V Waktu : 1 x 2 x 50 menit Pertemuan : 4 (Empat)") A. Tujuan Instruksional 1. Umum SATUAN ACARA PERKULIAHAN ( SAP ) Mata Kuliah : Rekayasa Lalulintas Kode : CES 5353 Semester : V Waktu : 1 x 2 x 50 menit Pertemuan : 4 (Empat) Mahasiswa dapat memahami tentang
A. Tujuan Instruksional 1. Umum SATUAN ACARA PERKULIAHAN ( SAP ) Mata Kuliah : Rekayasa Lalulintas Kode : CES 5353 Semester : V Waktu : 1 x 2 x 50 menit Pertemuan : 4 (Empat) Mahasiswa dapat memahami tentang
terdiri dari Langkah Berirama terdiri dari Latihan Gerak Berirama Senam Kesegaran Jasmani
 Gerak Berirama Gerak berirama disebut juga gerak ritmik. Gerak ini dilakukan dalam gerakan dasar di tempat. Contoh dari gerakan yang berirama adalah gerak jalan, menekuk, mengayun, dan sebagainya. Ayo
Gerak Berirama Gerak berirama disebut juga gerak ritmik. Gerak ini dilakukan dalam gerakan dasar di tempat. Contoh dari gerakan yang berirama adalah gerak jalan, menekuk, mengayun, dan sebagainya. Ayo
BAB 1 PENDAHULUAN 1-1
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Masalah Kehidupan manusia tidak pernah lepas dari sarana transportasi. Kebutuhan akan transportasi ini meningkat dari tahun ke tahun. Hal ini dapat dilihat dari peningkatan
BAB 1 PENDAHULUAN 1.1 Latar Belakang Masalah Kehidupan manusia tidak pernah lepas dari sarana transportasi. Kebutuhan akan transportasi ini meningkat dari tahun ke tahun. Hal ini dapat dilihat dari peningkatan
BAB I PENDAHULUAN. pesat ditandai dengan persaingan sangat kuat dalam bidang teknologi. Seiring
 BAB I PENDAHULUAN 1.1. Latar Belakang Pada abad ke 21 ini, ilmu pengetahuan dan teknologi berkembang sangat pesat ditandai dengan persaingan sangat kuat dalam bidang teknologi. Seiring dengan berkembangnya
BAB I PENDAHULUAN 1.1. Latar Belakang Pada abad ke 21 ini, ilmu pengetahuan dan teknologi berkembang sangat pesat ditandai dengan persaingan sangat kuat dalam bidang teknologi. Seiring dengan berkembangnya
KISI KISI UJI COBA SOAL
 KISI KISI UJI COBA SOAL Materi Indikator Soal Alat Evaluasi (soal) Gerak Lurus Disajikan 1. Perhatikan gambar dibawah ini! dengan gambar diagram S R O P Q T Kecepatan cartesius, Siswa dan -6-5 -4-3 -2-1
KISI KISI UJI COBA SOAL Materi Indikator Soal Alat Evaluasi (soal) Gerak Lurus Disajikan 1. Perhatikan gambar dibawah ini! dengan gambar diagram S R O P Q T Kecepatan cartesius, Siswa dan -6-5 -4-3 -2-1
Oleh: Denis Ahmad G ( ) Pembimbing:
 Pembimbing:") SISTEM PENDUKUNG KEPUTUSAN PENILAIAN POTENSI PEGAWAI DENGAN METODE FUZZY GAP ANALISIS UNTUK PROSES PROMOSI JABATAN PADA PT TELKOM RESEARCH AND DEVELOPMENT CENTER BANDUNG Pembimbing: Wiwik Anggraeni, S.Si,
SISTEM PENDUKUNG KEPUTUSAN PENILAIAN POTENSI PEGAWAI DENGAN METODE FUZZY GAP ANALISIS UNTUK PROSES PROMOSI JABATAN PADA PT TELKOM RESEARCH AND DEVELOPMENT CENTER BANDUNG Pembimbing: Wiwik Anggraeni, S.Si,
Dosen Pembimbing : Subchan, M. Sc., Ph.D Drs. Iis Herisman, M. Si
 Perencanaan Lintasan Dubins-Geometri pada Kapal Tanpa Awak untuk Menghindari Halangan Statis Oleh : Nur Mu alifah 1209 100 706 Dosen Pembimbing : Subchan, M. Sc., Ph.D Drs. Iis Herisman, M. Si Jurusan
Perencanaan Lintasan Dubins-Geometri pada Kapal Tanpa Awak untuk Menghindari Halangan Statis Oleh : Nur Mu alifah 1209 100 706 Dosen Pembimbing : Subchan, M. Sc., Ph.D Drs. Iis Herisman, M. Si Jurusan
EKO TRI WASISTO Dosen Pembimbing 1 Dosen Pembimbing 2
 RANCANG BANGUN SISTEM KONTROL ATTITUDE PADA UAV (UNMANNED AERIAL VEHICLE) QUADROTOR DF- UAV01 DENGAN MENGGUNAKAN SENSOR ACCELEROMETER 3-AXIS DENGAN METODE FUZZY LOGIC EKO TRI WASISTO 2407.100.065 Dosen
RANCANG BANGUN SISTEM KONTROL ATTITUDE PADA UAV (UNMANNED AERIAL VEHICLE) QUADROTOR DF- UAV01 DENGAN MENGGUNAKAN SENSOR ACCELEROMETER 3-AXIS DENGAN METODE FUZZY LOGIC EKO TRI WASISTO 2407.100.065 Dosen
Bab 1 PENDAHULUAN 1.1 Latar Belakang Masalah
 Bab 1 PENDAHULUAN 1.1 Latar Belakang Masalah Saat ini kebutuhan manusia akan teknologi meningkat dengan sangat pesat. Hal itu dikarenakan pekerjaan akan terasa lebih mudah jika diselesaikan dengan menggunakan
Bab 1 PENDAHULUAN 1.1 Latar Belakang Masalah Saat ini kebutuhan manusia akan teknologi meningkat dengan sangat pesat. Hal itu dikarenakan pekerjaan akan terasa lebih mudah jika diselesaikan dengan menggunakan
Simpang Tak Bersinyal Notasi, istilah dan definisi khusus untuk simpang tak bersinyal di bawah ini :
 223 DEFINISI DAN ISTILAH Simpang Tak Bersinyal Notasi, istilah dan definisi khusus untuk simpang tak bersinyal di bawah ini : Kondisi Geometrik LENGAN Bagian persimpangan jalan dengan pendekat masuk atau
223 DEFINISI DAN ISTILAH Simpang Tak Bersinyal Notasi, istilah dan definisi khusus untuk simpang tak bersinyal di bawah ini : Kondisi Geometrik LENGAN Bagian persimpangan jalan dengan pendekat masuk atau
BAB I PENDAHULUAN. ilmu pengetahuan dan teknologi dalam setiap kehidupan dan kegiatan manusia..
 BAB I PENDAHULUAN 1.1. Latar Belakang Sistem otomasi memegang peranan sangan penting dalam perkembangan ilmu pengetahuan dan teknologi dalam setiap kehidupan dan kegiatan manusia.. Sistem otomasi selain
BAB I PENDAHULUAN 1.1. Latar Belakang Sistem otomasi memegang peranan sangan penting dalam perkembangan ilmu pengetahuan dan teknologi dalam setiap kehidupan dan kegiatan manusia.. Sistem otomasi selain
BAB I PENDAHULUAN. ukuran, dan warna ketika suatu citra digambarkan meskipun dalam ruang 2D (dua
 BAB I PENDAHULUAN 1.1 LATAR BELAKANG Suatu citra memiliki beragam bentuk tekstur dan warna yang berbeda. Citra dapat dikenali dengan mudah oleh manusia dikarenakan manusia sudah memiliki persepsi atau
BAB I PENDAHULUAN 1.1 LATAR BELAKANG Suatu citra memiliki beragam bentuk tekstur dan warna yang berbeda. Citra dapat dikenali dengan mudah oleh manusia dikarenakan manusia sudah memiliki persepsi atau
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Logistik atau disebut dengan manajemen logistik adalah bagian dari manajemen rantai pasok yang merencanakan, menerapkan, serta mengontrol aliran dan penyimpanan barang,
BAB I PENDAHULUAN 1.1 Latar Belakang Logistik atau disebut dengan manajemen logistik adalah bagian dari manajemen rantai pasok yang merencanakan, menerapkan, serta mengontrol aliran dan penyimpanan barang,
MEKANIKA. Oleh WORO SRI HASTUTI DIBERIKAN PADA PERKULIAHAN KONSEP DASAR IPA. Pertemuan 5
 MEKANIKA Oleh WORO SRI HASTUTI DIBERIKAN PADA PERKULIAHAN KONSEP DASAR IPA Pertemuan 5 KINEMATIKA DAN DINAMIKA Sub topik: PARTIKEL Kinematika Dinamika KINEMATIKA mempelajari gerakan benda dengan mengabaikan
MEKANIKA Oleh WORO SRI HASTUTI DIBERIKAN PADA PERKULIAHAN KONSEP DASAR IPA Pertemuan 5 KINEMATIKA DAN DINAMIKA Sub topik: PARTIKEL Kinematika Dinamika KINEMATIKA mempelajari gerakan benda dengan mengabaikan
BAB III LANDASAN TEORI. A. Satuan Ruang Parkir
 BAB III LANDASAN TEORI A. Satuan Ruang Parkir Menurut Hobbs (1995) dalam Herfanyah (2013), dalam mengatur perparkiran bukan kepentingan teknik semata yang menjadi perhatian, melainkan juga yang menyangkut
BAB III LANDASAN TEORI A. Satuan Ruang Parkir Menurut Hobbs (1995) dalam Herfanyah (2013), dalam mengatur perparkiran bukan kepentingan teknik semata yang menjadi perhatian, melainkan juga yang menyangkut
BAB IV PENGUJIAN SISTEM. Pengujian minimum system bertujuan untuk mengetahui apakah minimum
 BAB IV PENGUJIAN SISTEM Pengujian sistem yang dilakukan penulis merupakan pengujian terhadap perangkat keras dan.perangkat lunak dari sistem secara keseluruhan yang telah selesai dibuat untuk mengetahui
BAB IV PENGUJIAN SISTEM Pengujian sistem yang dilakukan penulis merupakan pengujian terhadap perangkat keras dan.perangkat lunak dari sistem secara keseluruhan yang telah selesai dibuat untuk mengetahui
BAB IV INTERPRETASI KUANTITATIF ANOMALI SP MODEL LEMPENGAN. Bagian terpenting dalam eksplorasi yaitu pengidentifikasian atau
 BAB IV INTERPRETASI KUANTITATIF ANOMALI SP MODEL LEMPENGAN Bagian terpenting dalam eksplorasi yaitu pengidentifikasian atau pengasumsian bentuk dan kedalaman benda yang tertimbun. Berbagai macam metode
BAB IV INTERPRETASI KUANTITATIF ANOMALI SP MODEL LEMPENGAN Bagian terpenting dalam eksplorasi yaitu pengidentifikasian atau pengasumsian bentuk dan kedalaman benda yang tertimbun. Berbagai macam metode
IMPLEMENTASI FUZZY TSUKAMOTO DALAM PENENTUAN KESESUAIAN LAHAN UNTUK TANAMAN KARET DAN KELAPA SAWIT
 IMPLEMENTASI FUZZY TSUKAMOTO DALAM PENENTUAN KESESUAIAN LAHAN UNTUK TANAMAN KARET DAN KELAPA SAWIT Maya Yusida 1, Dwi Kartini 2, Andi Farmadi 3, Radityo Adi Nugroho 4, Muliadi 5 123Prodi Ilmu Komputer
IMPLEMENTASI FUZZY TSUKAMOTO DALAM PENENTUAN KESESUAIAN LAHAN UNTUK TANAMAN KARET DAN KELAPA SAWIT Maya Yusida 1, Dwi Kartini 2, Andi Farmadi 3, Radityo Adi Nugroho 4, Muliadi 5 123Prodi Ilmu Komputer
HUBUNGAN SATUAN PANJANG DENGAN DERAJAT
 GEOMETRI BIDANG Pada bab ini akan dibahas bentuk-bentuk bidang dalam ruang dimensi dua, keliling serta luasan dari bidang tersebut, bentuk ini banyak kaitannya dengan kegiatan ekonomi (bisnis dan manajemen)
GEOMETRI BIDANG Pada bab ini akan dibahas bentuk-bentuk bidang dalam ruang dimensi dua, keliling serta luasan dari bidang tersebut, bentuk ini banyak kaitannya dengan kegiatan ekonomi (bisnis dan manajemen)
DAFTAR ISI. Halaman Judul Pengesahan Persetujuan Motto dan Persembahan ABSTRAK ABSTRACT KATA PENGANTAR
 DAFTAR ISI Halaman Judul i Pengesahan ii Persetujuan iii Motto dan Persembahan iv ABSTRAK v ABSTRACT vi KATA PENGANTAR vii DAFTAR ISI ix DAFTAR TABEL xiii DAFTAR GAMBAR xv DAFTAR LAMPIRAN xvi DAFTAR NOTASI
DAFTAR ISI Halaman Judul i Pengesahan ii Persetujuan iii Motto dan Persembahan iv ABSTRAK v ABSTRACT vi KATA PENGANTAR vii DAFTAR ISI ix DAFTAR TABEL xiii DAFTAR GAMBAR xv DAFTAR LAMPIRAN xvi DAFTAR NOTASI
BAB I PENDAHULUAN. 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Persimpangan adalah simpul dalam jaringan transportasi dimana dua atau lebih ruas jalan bertemu dan disini pulalah banyak terjadi konflik dalam lalu lintas. Konflik
BAB I PENDAHULUAN 1.1 Latar Belakang Persimpangan adalah simpul dalam jaringan transportasi dimana dua atau lebih ruas jalan bertemu dan disini pulalah banyak terjadi konflik dalam lalu lintas. Konflik
BAB 4 HASIL SIMULASI DAN ANALISA
 48 BAB 4 HASIL SIMULASI DAN ANALISA 4.1 Simulasi dan Hasil Simulasi dilakukan untuk menguji tingkat akurasi sistem pengenalan penyakit darah dengan citra darah menggunakan metode logika fuzzy, yang bertujuan
48 BAB 4 HASIL SIMULASI DAN ANALISA 4.1 Simulasi dan Hasil Simulasi dilakukan untuk menguji tingkat akurasi sistem pengenalan penyakit darah dengan citra darah menggunakan metode logika fuzzy, yang bertujuan
10 Grafik Sudut Deviasi Bangun Datar
 10 Grafik Sudut Deviasi Bangun Datar Kita telah mempelajari bagaimana menghitung besar sudut belok di setiap titik pada tepi suatu bangun datar. Satu hal yang menarik tentang lingkaran adalah bahwa besar
10 Grafik Sudut Deviasi Bangun Datar Kita telah mempelajari bagaimana menghitung besar sudut belok di setiap titik pada tepi suatu bangun datar. Satu hal yang menarik tentang lingkaran adalah bahwa besar
BAB III PERENCANAAN DAN PERANCANGAN
 BAB III PERENCANAAN DAN PERANCANGAN 3.1 Perencanaan Dalam sebuah robot terdapat dua sistem yaitu sistem elektronis dan sistem mekanis, dimana sistem mekanis dikendalikan oleh sistem elektronis bisa berupa
BAB III PERENCANAAN DAN PERANCANGAN 3.1 Perencanaan Dalam sebuah robot terdapat dua sistem yaitu sistem elektronis dan sistem mekanis, dimana sistem mekanis dikendalikan oleh sistem elektronis bisa berupa
ANIMASI OBYEK TIGA DIMENSI DENGAN TEKNIK NON-PHOTOREALISTIC RENDERING UNTUK AUGMENTED REALITY MENGGUNAKAN LOGIKA FUZZY
 ANIMASI OBYEK TIGA DIMENSI DENGAN TEKNIK NON-PHOTOREALISTIC RENDERING UNTUK AUGMENTED REALITY MENGGUNAKAN LOGIKA FUZZY 1 Moch. Yordan Rismarinandyo Siagian S,ST 2 Mochhammad Hariadi, S.T., M.Sc, P.hD Fakultas
ANIMASI OBYEK TIGA DIMENSI DENGAN TEKNIK NON-PHOTOREALISTIC RENDERING UNTUK AUGMENTED REALITY MENGGUNAKAN LOGIKA FUZZY 1 Moch. Yordan Rismarinandyo Siagian S,ST 2 Mochhammad Hariadi, S.T., M.Sc, P.hD Fakultas
ARTIKEL APLIKASI PEMILIHAN TEMPAT WISATA KABUPATEN TULUNGAGUNG
 ARTIKEL APLIKASI PEMILIHAN TEMPAT WISATA KABUPATEN TULUNGAGUNG Oleh: ILHAM SUAIDI 11.1.03.02.0161 Dibimbing oleh : 1. Daniel Swanjaya, M.Kom. 2. Resty Wulanningrum, M.Kom. PROGRAM STUDI TEKNIK INFORMATIKA
ARTIKEL APLIKASI PEMILIHAN TEMPAT WISATA KABUPATEN TULUNGAGUNG Oleh: ILHAM SUAIDI 11.1.03.02.0161 Dibimbing oleh : 1. Daniel Swanjaya, M.Kom. 2. Resty Wulanningrum, M.Kom. PROGRAM STUDI TEKNIK INFORMATIKA
SISTEM PENDUKUNG KEPUTUSAN DALAM PEMBERIAN BEASISWA DENGAN MENGGUNAKAN METODE WEIGHTED PRODUCT (Studi kasus: Universitas Sari Mutiara Indonesia)
") Page 83 SISTEM PENDUKUNG KEPUTUSAN DALAM PEMBERIAN BEASISWA DENGAN MENGGUNAKAN METODE WEIGHTED PRODUCT (Studi kasus: Universitas Sari Mutiara Indonesia) Burhanuddin, Dini 2 Universitas Sari Mutiara Indonesia
Page 83 SISTEM PENDUKUNG KEPUTUSAN DALAM PEMBERIAN BEASISWA DENGAN MENGGUNAKAN METODE WEIGHTED PRODUCT (Studi kasus: Universitas Sari Mutiara Indonesia) Burhanuddin, Dini 2 Universitas Sari Mutiara Indonesia
BAB II TINJAUAN PUSTAKA. memancar meninggalkan persimpangan (Hobbs F. D., 1995).
.") BAB II TINJAUAN PUSTAKA 2.1 Persimpangan Persimpangan adalah simpul transportasi yang terbentuk dari beberapa pendekat dimana arus kendaraan dari beberapa pendekat tersebut bertemu dan memancar meninggalkan
BAB II TINJAUAN PUSTAKA 2.1 Persimpangan Persimpangan adalah simpul transportasi yang terbentuk dari beberapa pendekat dimana arus kendaraan dari beberapa pendekat tersebut bertemu dan memancar meninggalkan
SISTEM PENDUKUNG KEPUTUSAN DALAM PEMBERIAN BEASISWA DENGAN MENGGUNAKAN METODE WEIGHTED PRODUCT (Studi kasus: Universitas Sari Mutiara Indonesia)
") Page 83 SISTEM PENDUKUNG KEPUTUSAN DALAM PEMBERIAN BEASISWA DENGAN MENGGUNAKAN METODE WEIGHTED PRODUCT (Studi kasus: Universitas Sari Mutiara Indonesia) Burhanuddin, Dini 2 Universitas Sari Mutiara Indonesia
Page 83 SISTEM PENDUKUNG KEPUTUSAN DALAM PEMBERIAN BEASISWA DENGAN MENGGUNAKAN METODE WEIGHTED PRODUCT (Studi kasus: Universitas Sari Mutiara Indonesia) Burhanuddin, Dini 2 Universitas Sari Mutiara Indonesia
DAFTAR ISI KATA PENGANTAR. UCAPAN TERIMA KASIH... iii. DAFTAR ISI... v. DAFTAR GAMBAR... x BAB I PENDAHULUAN... 1
 DAFTAR ISI ABSTRAK... i KATA PENGANTAR... ii UCAPAN TERIMA KASIH... iii DAFTAR ISI... v DAFTAR TABEL... viii DAFTAR GAMBAR... x BAB I PENDAHULUAN... 1 A. Latar Belakang... 1 B. Rumusan Masalah... 5 C.
DAFTAR ISI ABSTRAK... i KATA PENGANTAR... ii UCAPAN TERIMA KASIH... iii DAFTAR ISI... v DAFTAR TABEL... viii DAFTAR GAMBAR... x BAB I PENDAHULUAN... 1 A. Latar Belakang... 1 B. Rumusan Masalah... 5 C.
BAB I PENDAHULUAN. fasilitas- fasilitas atau fitur- fitur yang ada di perumahan tersebut dan faktor-faktor
 BAB I PENDAHULUAN I.1 Latar Belakang Pengembang atau developer perumahan selaku koordinator pelaksana di lapangan perlu diiringi oleh perkembangan teknologi komputer untuk dapat memenuhi kebutuhan para
BAB I PENDAHULUAN I.1 Latar Belakang Pengembang atau developer perumahan selaku koordinator pelaksana di lapangan perlu diiringi oleh perkembangan teknologi komputer untuk dapat memenuhi kebutuhan para
GERAK PADA GARIS LURUS
 GERAK PADA GARIS LURUS Perpindahan, Waktu dan Kecepatan rata rata Perpindahan, perubahan posisi benda terhadap titik asal A X AB = X B - X A B A X BA = X A - X B B Proses perpindahan atau perubahan posisi
GERAK PADA GARIS LURUS Perpindahan, Waktu dan Kecepatan rata rata Perpindahan, perubahan posisi benda terhadap titik asal A X AB = X B - X A B A X BA = X A - X B B Proses perpindahan atau perubahan posisi
Penerapan Logika Fuzzy Pada Sistem Parkir Truk
 Penerapan Logika Fuzzy Pada Sistem Parkir Truk Kuswara Setiawan Program Studi Sistem Informasi Universitas Pelita Harapan Surabaya, Indonesia Abstrak Suatu sistem dinamis dalam kehidupan sehari-hari seringkali
Penerapan Logika Fuzzy Pada Sistem Parkir Truk Kuswara Setiawan Program Studi Sistem Informasi Universitas Pelita Harapan Surabaya, Indonesia Abstrak Suatu sistem dinamis dalam kehidupan sehari-hari seringkali
MK Konsep Teknologi PENGAMBILAN KEPUTUSAN
 PENGAMBILAN PENGAMBILAN Pengantar Dua kegiatan umum manusia: Pengambilan keputusan (decision making) dan Pelaksanaan keputusan (action plan) Tujuan Instruksional Khusus 1. Mampu menunjukkan faktor, kondisi,
PENGAMBILAN PENGAMBILAN Pengantar Dua kegiatan umum manusia: Pengambilan keputusan (decision making) dan Pelaksanaan keputusan (action plan) Tujuan Instruksional Khusus 1. Mampu menunjukkan faktor, kondisi,
BAB 2 TINJAUAN PUSTAKA
 BAB 2 TINJAUAN PUSTAKA 4 BAB 2 TINJAUAN PUSTAKA 2.1. Pengertian Fuzzy Logika fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang input kedalam suatu ruang output. Titik awal dari konsep modern
BAB 2 TINJAUAN PUSTAKA 4 BAB 2 TINJAUAN PUSTAKA 2.1. Pengertian Fuzzy Logika fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang input kedalam suatu ruang output. Titik awal dari konsep modern
Penyelesaian Traveling Salesperson Problem dengan Menggunakan Algoritma Semut
 Penyelesaian Traveling Salesperson Problem dengan Menggunakan Algoritma Semut Irfan Afif (13507099) Program Studi Teknik Informatika, Sekolah Teknik Elektro dan Informatika, Institut Teknologi Bandung,
Penyelesaian Traveling Salesperson Problem dengan Menggunakan Algoritma Semut Irfan Afif (13507099) Program Studi Teknik Informatika, Sekolah Teknik Elektro dan Informatika, Institut Teknologi Bandung,
FUZZY MULTI-CRITERIA DECISION MAKING
 Media Informatika, Vol. 3 No. 1, Juni 2005, 25-38 ISSN: 0854-4743 FUZZY MULTI-CRITERIA DECISION MAKING Sri Kusumadewi, Idham Guswaludin Jurusan Teknik Informatika, Fakultas Teknologi Industri, Universitas
Media Informatika, Vol. 3 No. 1, Juni 2005, 25-38 ISSN: 0854-4743 FUZZY MULTI-CRITERIA DECISION MAKING Sri Kusumadewi, Idham Guswaludin Jurusan Teknik Informatika, Fakultas Teknologi Industri, Universitas
GERAK LURUS. * Perpindahan dari x 1 ke x 2 = x 2 - x 1 = 7-2 = 5 ( positif ) * Perpindahan dari x 1 ke X 3 = x 3 - x 1 = -2 - ( +2 ) = -4 ( negatif )
 * Perpindahan dari x 1 ke X 3 = x 3 - x 1 = -2 - ( +2 ) = -4 ( negatif )") Gerak Lurus 21 GERAK LURUS Suatu benda melakukan gerak, bila benda tersebut kedudukannya (jaraknya) berubah setiap saat terhadap titik asalnya ( titik acuan ). Sebuah benda dikatakan bergerak lurus, jika
Gerak Lurus 21 GERAK LURUS Suatu benda melakukan gerak, bila benda tersebut kedudukannya (jaraknya) berubah setiap saat terhadap titik asalnya ( titik acuan ). Sebuah benda dikatakan bergerak lurus, jika
BAB 4 IMPLEMENTASI DAN EVALUASI
 42 BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Spesifikasi Komputer yang Digunakan Spesifikasi sistem komputer yang digunakan untuk menjalankan program simulasi adalah sebagai berikut. 4.1.1 Spesifikasi Perangkat
42 BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Spesifikasi Komputer yang Digunakan Spesifikasi sistem komputer yang digunakan untuk menjalankan program simulasi adalah sebagai berikut. 4.1.1 Spesifikasi Perangkat
MODEL PERILAKU BERJALAN AGEN-AGEN MENGGUNAKAN FUZZY LOGIC
 Jurnal Komputer dan Informatika (KOMPUTA) 37 Edisi. I Volume. 1, Maret 212 MODEL PERILAKU BERJALAN AGEN-AGEN MENGGUNAKAN FUZZY LOGIC Nelly Indiani Widiastuti Program Studi Teknik Informatika Fakultas Teknik
Jurnal Komputer dan Informatika (KOMPUTA) 37 Edisi. I Volume. 1, Maret 212 MODEL PERILAKU BERJALAN AGEN-AGEN MENGGUNAKAN FUZZY LOGIC Nelly Indiani Widiastuti Program Studi Teknik Informatika Fakultas Teknik
ABSTRAK. Kata kunci: keselamatan pengguna jalan, kecepatan pengemudi kendaraan, ZoSS
 ABSTRAK Kawasan pendidikan merupakan suatu kawasan yang rentan terjadi kecelakaan lalu lintas dan yang menjadi korban adalah para siswa. Untuk mengantisipasi hal tersebut maka dibuatkanlah Zona Selamat
ABSTRAK Kawasan pendidikan merupakan suatu kawasan yang rentan terjadi kecelakaan lalu lintas dan yang menjadi korban adalah para siswa. Untuk mengantisipasi hal tersebut maka dibuatkanlah Zona Selamat