KETERANGAN RANGKAIAN DRIVER MOTOR DAN BUZZER ALARM. No.2. SKALA : Dig. Purnomo FT - UNY. Dip. SRI WALUYANTI Dist. SRI WALUYANTI
|
|
|
- Agus Susman
- 5 tahun lalu
- Tontonan:
Transkripsi
1 LAMPIRAN
2 RANGKAIAN DRIVER MOTOR DAN BUZZER ALARM FT - UNY SKALA : Dig. Purnomo Dip. SRI WALUYANTI Dist. SRI WALUYANTI KETERANGAN A4 No
3 FT - UNY RANGKAIAN SENSOR OPTOCOUPLER SKALA : Dig. Purnomo Dip. SRI WALUYANTI Dist. SRI WALUYANTI KETERANGAN A4 No
4 RANGKAIAN SIMULASI KRL DENGAN KENDALI KECEPATAN SISTEM PWM DAN PALANG PINTU PERLINTASAN OTOMATIS FT - UNY SKALA : Dig. Purnomo Dip. SRI WALUYANTI Dist. SRI WALUYANTI KETERANGAN A4 No



5 LAMPIRAN 4 LAYOUT SISTEM MINIMUM ATMEGA 16 LAYOUT SENSOR OPTOCOUPLER LAYOUT OUTPUT LAYOUT ALARM



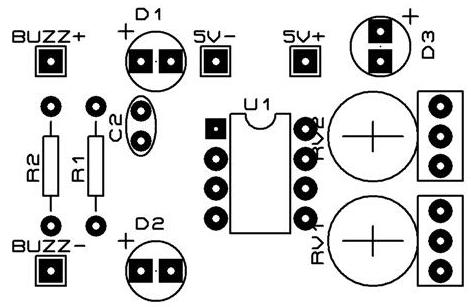
6 LAMPIRAN 5 TATA LETAK KOMPONEN SISTEM MINIMUM ATMEGA16 TATA LETAK KOMPONEN SENSOR OPTOCOUPLER TATA LETAK KOMPONEN OUTPUT TATA LETAK KOMPONEN ALARM
7 LAMPIRAN 6 PART LIST KOMPONEN 1. Catu daya rangkaian 5V No. Komponen Nilai komponen Jumlah 1. IC Regulator LM Kapasitor polar 100uF 1 3. Resistor 100 Ω 1 4. Led merah 3mm 1 2. Sistem minimum ATmega16 No. Komponen Nilai komponen Jumlah 1. Kapasitor non polar 22pF 2 2. Crystal 12Mhz 1 3. Mikrokontroler ATmega Resistor 1K Ω 4 5. Reset switch 1 6. Fet transistor IRF Transistor BC Rangkaian Sensor Optocoupler No. Komponen Nilai komponen Jumlah 1. Resistor 100 Ω 4 2. Resistor 1K Ω 4 3. Led infrared 5mm 4 4. Photodioda 5mm 4
8 4. Rangkaian Alarm No. Komponen Nilai komponen Jumlah 1. Buzzer 5V 1 2. Buzzer 12V 1 3. IC L293D 1 4. Kapasitor non polar 3p Dioda 4 6. Potensiometer 10K Ω 2 7. IC Kapasitor polar 100uF 1 9. Resistor 100 Ω Led merah dan Led hijau 3mm 1 5. Lain lain No. Komponen Nilai komponen Jumlah 1. Kabel Secukupnya 2. Konektor Secukupnya 3. Box 1 4. Banana pin Male pin Female pin Secukupnya 5. Motor DC 2 6. PCB polos Secukupnya 7. Ferid chloride Secukupnya 8. Timah Secukupnya


9 LAMPIRAN 7 GAMBAR FOTO ALAT SIMULASI
10 LAMPIRAN 8 Petunjuk Pengoperasian : Pengoperasian alat ini dapat dilakukan dengan cara sebagai berikut : 1. Menghubungkan rangkaian dengan tegangan 12 VDC. 2. Menghubungkan sistem minimum dengan komputer menggunakan downloader USB melalui port USB untuk mendownload program yang telah dibuat. 3. Setelah proses download program selesai, memasang rangkaian ke dalam alat simulasi KRL sesuai dengan kabel yang telah di tentukan fungsinya. 4. Menjalankan simulasi KRL pada lintasan yang telah terpasang sensor untuk mendapatkan masukan. 5. Output sensor dapat diterima mikrokontroller secara langsung dan melakukan proses masukan sesuai program yang telah dibuat. 6. Melalui port PA0 mikrokontroller, data masukan sensor pertama diproses kemudian dikeluarkan melalui port PD2 dan PD7 yang keluaran tersebut di terima driver output untuk membunyikan alarm dan menurunkan kecepatan kereta dengan merubah frekuensinya tegangan motor dc. 7. Melalui port PA1 mikrokontroller, data masukan sensor kedua diproses kemudian dikeluarkan melalui port PD0 yang keluaran tersebut di terima driver output untuk menurunkan pintu perlintasan. 8. Ketika pintu perlintasan menutup akan mengaktifkan limit switch (LS1) yang kemudian mengirimkan data aktuasi dan di terima mikrokontroller melalui port PD5 yang akan mematikan motor pintu perlintasan pada keadaan menutup.
11 9. Melalui port PA2 mikrokontroller, data masukan sensor ketiga diproses kemudian dikeluarkan melalui port PD1 yang keluaran tersebut di terima driver output untuk membuka pintu perlintasan. 10. Ketika pintu perlintasan membuka akan mengaktifkan limit switch (LS2) yang kemudian mengirimkan data aktuasi dan di terima mikrokontroller melalui port PD6 yang akan mematikan motor pintu perlintasan pada keadaan membuka. 11. Melalui port PA3 mikrokontroller, data masukan sensor keempat diproses kemudian dikeluarkan melalui port PD2 dan PD7 yang keluaran tersebut diterima driver output untuk mematikan alarm dan mengembalikaan kecepatan kereta dengan cara mengembalikan frekueni tegangan motor dc.
12 LAMPIRAN 9 Listing Program BASCOM AVR Report : SEPUR Date : Time : 09:26:00 Compiler : BASCOM-AVR LIBRARY V Processor : M16 SRAM : 400 hex EEPROM : 200 hex ROMSIZE : 4000 hex ROMIMAGE : 232 hex -> Will fit into ROM ROMIMAGE : 562 dec FLASH USED : 3 % BAUD : 9600 Baud XTAL : Hz BAUD error : 0.16% Stack start : 45F hex Stack size : 20 hex S-Stacksize : 8 hex S-Stackstart : 440 hex Framesize : 18 hex Framestart : 427 hex Space left : 949 dec $regfile = "m16def.dat" $crystal = Config Adc = Single, Prescaler = Auto, Reference = Avcc Start Adc Config Timer1 = Pwm, Pwm = 9, Compare A Pwm = Clear Up, Prescale = 8 Start Timer1 Dim A As Word, Channel0 As Byte Dim B As Word, Channel1 As Byte Dim C As Word, Channel2 As Byte Dim D As Word, Channel3 As Byte Channel0 = 0 Channel1 = 0 Channel2 = 0 Channel3 = 0 Config Porta = Input Config Portb = Input Config Portd = Output Ddra = &B Porta = &B
13 Ddrb = &B Portb = &B Limit1 Alias Pinb.0 Limit2 Alias Pinb.1 Buzzer Alias Portd.6 Do '{INPUT ADC 'A=PORTA.0 A = Getadc(0, Channel0) 'B=PORTA.1 B = Getadc(1, Channel1) 'C=PORTA.2 C = Getadc(2, Channel2) 'D=PORTA.3 D = Getadc(3, Channel3) '} Loop End If A < 255 Then Portd.0 = 1 Set Buzzer Pwm1a = 100 Pwm1b = 100 'Elseif A < 128 Then 'Portd.0 = 0 End If If B < 255 Then Portd.1 = 1 Elseif Limit1 = 0 Then Reset Portd.1 End If If C < 255 Then Portd.2 = 1 Elseif Limit2 = 0 Then Reset Portd.2 End If If D < 255 Then Portd.0 = 0 Portd.3 = 1 Pwm1a = 0 Reset Buzzer Elseif D < 128 Then Portd.3 = 0 End If
SIMULASI KERETA REL LISTRIK DENGAN KENDALI KECEPATAN SISTEM PWM DAN PALANG PINTU PERLINTASANN OTOMATIS BERBASIS MIKROKONTROLLER. ATmega16 PROYEK AKHIR
 SIMULASI KERETA REL LISTRIK DENGAN KENDALI KECEPATAN SISTEM PWM DAN PALANG PINTU PERLINTASANN OTOMATIS BERBASIS MIKROKONTROLLER ATmega16 PROYEK AKHIR Diajukan Kepada Fakultas Teknik Universitas Negeri
SIMULASI KERETA REL LISTRIK DENGAN KENDALI KECEPATAN SISTEM PWM DAN PALANG PINTU PERLINTASANN OTOMATIS BERBASIS MIKROKONTROLLER ATmega16 PROYEK AKHIR Diajukan Kepada Fakultas Teknik Universitas Negeri
BAB V KESIMPULAN DAN SARAN
 BAB V KESIMPULAN DAN SARAN A. Kesimpulan Berdasarkan hasil pengujian yang telah dilakukan terhadap alat pengendali dan media simulasi kereta KRL dengan kendali kecepatan dan pintu perlintasan otomatis
BAB V KESIMPULAN DAN SARAN A. Kesimpulan Berdasarkan hasil pengujian yang telah dilakukan terhadap alat pengendali dan media simulasi kereta KRL dengan kendali kecepatan dan pintu perlintasan otomatis
BAB IV PENGUKURAN DAN ANALISA DATA
 BAB IV PENGUKURAN DAN ANALISA DATA 4.1 Tujuan Pengukuran yang dilakukan pada dasarnya adalah untuk mendapatkan data dari sistem yang dibuat. Pengujian dan pengukuran pada rangkaian ini bertujuan agar menghasilkan
BAB IV PENGUKURAN DAN ANALISA DATA 4.1 Tujuan Pengukuran yang dilakukan pada dasarnya adalah untuk mendapatkan data dari sistem yang dibuat. Pengujian dan pengukuran pada rangkaian ini bertujuan agar menghasilkan
BAB III METODE PENELITIAN. Bahan komponen yang digunakan untuk pembuatan rangkaian modul. adalah sebagai berikut : 3. Kapasitor 22nF dan 10nF
 29 BAB III METODE PENELITIAN 3.1 BAHAN Bahan komponen yang digunakan untuk pembuatan rangkaian modul adalah sebagai berikut : 3.1.1 Rangkaian Minimum System Komponen yang digunakan pada rangkaian minimum
29 BAB III METODE PENELITIAN 3.1 BAHAN Bahan komponen yang digunakan untuk pembuatan rangkaian modul adalah sebagai berikut : 3.1.1 Rangkaian Minimum System Komponen yang digunakan pada rangkaian minimum
BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM
 BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM III.1. Analisa Masalah Dalam perancangan sistem otomatisasi pemakaian listrik pada ruang belajar berbasis mikrokontroler terdapat beberapa masalah yang harus
BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM III.1. Analisa Masalah Dalam perancangan sistem otomatisasi pemakaian listrik pada ruang belajar berbasis mikrokontroler terdapat beberapa masalah yang harus
PENGISIAN AKI DENGAN BUCK CONVERTER
 PENGISIAN AKI DENGAN BUCK CONVERTER Oleh : Yul Antonisfia, Era Madona Staf Pengajar Jurusan Teknik Elektro Politeknik Negeri Padang Email : yul_antoni@yahoo.com, emadona38@gmail.com ABSTRACT Buck converter
PENGISIAN AKI DENGAN BUCK CONVERTER Oleh : Yul Antonisfia, Era Madona Staf Pengajar Jurusan Teknik Elektro Politeknik Negeri Padang Email : yul_antoni@yahoo.com, emadona38@gmail.com ABSTRACT Buck converter
PRAKTIKUM PEMOGRAMAN ROBOT CERDAS LABORATORIUM AI
 2017 MODUL ROBOT LINEFOLLOWER PRAKTIKUM PEMOGRAMAN ROBOT CERDAS LABORATORIUM AI i Pengantar Laboratorium Kecerdasan Buatan setiap semester selalu melaksanakan kegiatan praktikum dan pada semester genap
2017 MODUL ROBOT LINEFOLLOWER PRAKTIKUM PEMOGRAMAN ROBOT CERDAS LABORATORIUM AI i Pengantar Laboratorium Kecerdasan Buatan setiap semester selalu melaksanakan kegiatan praktikum dan pada semester genap
BAB IV PENGUKURAN DAN ANALISA DATA. dari sistem yang dibuat. Pengujian dan pengukuran pada rangkaian ini bertujuan
 63 BAB IV PENGUKURAN DAN ANALISA DATA 4.1 Tujuan Pengukuran yang dilakukan pada dasarnya adalah untuk mendapatkan data dari sistem yang dibuat. Pengujian dan pengukuran pada rangkaian ini bertujuan agar
63 BAB IV PENGUKURAN DAN ANALISA DATA 4.1 Tujuan Pengukuran yang dilakukan pada dasarnya adalah untuk mendapatkan data dari sistem yang dibuat. Pengujian dan pengukuran pada rangkaian ini bertujuan agar
BAB IV ANALISA DAN HASIL KINERJA ALAT
 BAB IV ANALISA DAN HASIL KINERJA ALAT 4.1. Analisa dan Tujuan Pengujian Analisa bertujuan untuk menjelaskan secara teoritis sistem kerja rangkaian yang dirancang, sementara pengujian dilakukan untuk melihat
BAB IV ANALISA DAN HASIL KINERJA ALAT 4.1. Analisa dan Tujuan Pengujian Analisa bertujuan untuk menjelaskan secara teoritis sistem kerja rangkaian yang dirancang, sementara pengujian dilakukan untuk melihat
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT 1.1 Blok Diagram Sensor Kunci kontak Transmiter GSM Modem Recivier Handphone Switch Aktif Sistem pengamanan Mikrokontroler Relay Pemutus CDI LED indikator aktif Alarm Buzzer Gambar
BAB III PERANCANGAN ALAT 1.1 Blok Diagram Sensor Kunci kontak Transmiter GSM Modem Recivier Handphone Switch Aktif Sistem pengamanan Mikrokontroler Relay Pemutus CDI LED indikator aktif Alarm Buzzer Gambar
BAB III MIKROKONTROLER
 BAB III MIKROKONTROLER Mikrokontroler merupakan sebuah sistem yang seluruh atau sebagian besar elemennya dikemas dalam satu chip IC, sehingga sering disebut single chip microcomputer. Mikrokontroler merupakan
BAB III MIKROKONTROLER Mikrokontroler merupakan sebuah sistem yang seluruh atau sebagian besar elemennya dikemas dalam satu chip IC, sehingga sering disebut single chip microcomputer. Mikrokontroler merupakan
IV. HASIL DAN PEMBAHASAN. Telah direalisasikan alat pendeteksi logam yang terbuat dari induktor
 IV. HASIL DAN PEMBAHASAN A. Hasil Penelitian Telah direalisasikan alat pendeteksi logam yang terbuat dari induktor Perangkat terdiri dari perangkat keras dan perangkat lunak dimana koil datar. perangkat
IV. HASIL DAN PEMBAHASAN A. Hasil Penelitian Telah direalisasikan alat pendeteksi logam yang terbuat dari induktor Perangkat terdiri dari perangkat keras dan perangkat lunak dimana koil datar. perangkat
LISTING PROGRAM. Penyimpanan memori sementara dengan pemberian nama Sw_str untuk switch star dan S_flow untuk sensor Flow
 LISTING PROGRAM No Instruksi Keterangan 1 Program Bascom pada bagian Transceiver Pengisian untuk bagian mikrokontroler ATMega8 pada bagian transceiver 2 ======== inisialisasi =============== Langkah awal
LISTING PROGRAM No Instruksi Keterangan 1 Program Bascom pada bagian Transceiver Pengisian untuk bagian mikrokontroler ATMega8 pada bagian transceiver 2 ======== inisialisasi =============== Langkah awal
III. METODE PENELITIAN. Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Mei 2012 sampai
 48 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Mei 2012 sampai dengan
48 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Mei 2012 sampai dengan
BAB III METODOLOGI PENELITIAN. yang memiliki tegangan listrik AC 220 Volt. Saklar ON/OFF merupakan sebuah
 BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram PLN merupakan sumber daya yang berasal dari perusahaan listrik Negara yang memiliki tegangan listrik AC 220 Volt. Saklar ON/OFF merupakan sebuah saklar yang
BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram PLN merupakan sumber daya yang berasal dari perusahaan listrik Negara yang memiliki tegangan listrik AC 220 Volt. Saklar ON/OFF merupakan sebuah saklar yang
BAB 3 PERANCANGAN DAN PEMBUATAN SISTEM
 BAB 3 PERANCANGAN DAN PEMBUATAN SISTEM 3.1. Spesifikasi Sistem Sebelum merancang blok diagram dan rangkaian terlebih dahulu membuat spesifikasi awal rangkaian untuk mempermudah proses pembacaan, spesifikasi
BAB 3 PERANCANGAN DAN PEMBUATAN SISTEM 3.1. Spesifikasi Sistem Sebelum merancang blok diagram dan rangkaian terlebih dahulu membuat spesifikasi awal rangkaian untuk mempermudah proses pembacaan, spesifikasi
BAB IV METODE KERJA PRAKTEK
 BAB IV METODE KERJA PRAKTEK sebagai berikut : Metode yang digunakan dalam pengerjaan kerja praktek ini adalah 1. Wawancara, yaitu bertanya secara langsung kepada asisten laboratorium mikrokontroler untuk
BAB IV METODE KERJA PRAKTEK sebagai berikut : Metode yang digunakan dalam pengerjaan kerja praktek ini adalah 1. Wawancara, yaitu bertanya secara langsung kepada asisten laboratorium mikrokontroler untuk
BAB IV PERANCANGAN. Gambar 4. 1 Blok Diagram Alarm Rumah.
 BAB IV PERANCANGAN 4.1 Perancangan Sebelum melakukan implementasi diperlukan perancangan terlebih dahulu untuk alat yang akan di buat. Berikut rancangan alat Alarm rumah otomatis menggunakan mikrokontroler
BAB IV PERANCANGAN 4.1 Perancangan Sebelum melakukan implementasi diperlukan perancangan terlebih dahulu untuk alat yang akan di buat. Berikut rancangan alat Alarm rumah otomatis menggunakan mikrokontroler
BAB III METODOLOGI PENULISAN
 BAB III METODOLOGI PENULISAN 3.1 Blok Diagram Gambar 3.1 Blok Diagram Fungsi dari masing-masing blok diatas adalah sebagai berikut : 1. Finger Sensor Finger sensor berfungsi mendeteksi aliran darah yang
BAB III METODOLOGI PENULISAN 3.1 Blok Diagram Gambar 3.1 Blok Diagram Fungsi dari masing-masing blok diatas adalah sebagai berikut : 1. Finger Sensor Finger sensor berfungsi mendeteksi aliran darah yang
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN 3.1. Perancangan Perangkat Keras 3.1.1. Alat dan Bahan 1. Alat 1) Solder listrik. 2) Gergaji. 3) Tool set. 4) Bor PCB. 5) Multimeter. 6) Downloader. 2. Bahan 1) Sensor lm535 digunakan
BAB III METODE PENELITIAN 3.1. Perancangan Perangkat Keras 3.1.1. Alat dan Bahan 1. Alat 1) Solder listrik. 2) Gergaji. 3) Tool set. 4) Bor PCB. 5) Multimeter. 6) Downloader. 2. Bahan 1) Sensor lm535 digunakan
3.2. Tempat Penelitian Penelitian dan pengujian alat dilakukan di lokasi permainan game PT. EMI (Elektronik Megaindo) Plaza Medan Fair.
 Plaza Medan Fair.") BAB III METODOLOGI PENELITIAN 3.1. Metode Penelitian Dalam penulisan tugas akhir ini metode yang digunakan dalam penelitian adalah : 1. Metode Perancangan Metode yang digunakan untuk membuat rancangan
BAB III METODOLOGI PENELITIAN 3.1. Metode Penelitian Dalam penulisan tugas akhir ini metode yang digunakan dalam penelitian adalah : 1. Metode Perancangan Metode yang digunakan untuk membuat rancangan
RANCANG PALANG PINTU KERETA API BERBAS JURUSAN. Disusun Diploma. Oleh:
 RANCANG BANGUN SIMULASI PALANG PINTU KERETA API OTOMATIS BERBAS SIS MIKROKONTROLER AT89S52 LAPORAN TUGAS AKHIR Disusun Sebagai Salah Satu Syarat untuk Menyelesaikan Program Pendidikan Diploma III Oleh:
RANCANG BANGUN SIMULASI PALANG PINTU KERETA API OTOMATIS BERBAS SIS MIKROKONTROLER AT89S52 LAPORAN TUGAS AKHIR Disusun Sebagai Salah Satu Syarat untuk Menyelesaikan Program Pendidikan Diploma III Oleh:
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 39 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Gambaran Umum Pada bab ini akan dibahas mengenai perencanaan perangkat keras elektronik (hardware) dan pembuatan mekanik Eskalator. Sedangkan untuk pembuatan
39 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Gambaran Umum Pada bab ini akan dibahas mengenai perencanaan perangkat keras elektronik (hardware) dan pembuatan mekanik Eskalator. Sedangkan untuk pembuatan
BAB III METODA PENELITIAN
 42 BAB III METODA PENELITIAN 3.1. Komponen yang digunakan lain: Adapun komponen-komponen penting dalam pembuatan modul ini antara 1. Lampu UV 2. IC Atmega 16 3. Termokopel 4. LCD 2x16 5. Relay 5 vdc 6.
42 BAB III METODA PENELITIAN 3.1. Komponen yang digunakan lain: Adapun komponen-komponen penting dalam pembuatan modul ini antara 1. Lampu UV 2. IC Atmega 16 3. Termokopel 4. LCD 2x16 5. Relay 5 vdc 6.
BAB III METODE PENELITIAN. Berikut sistem dari modul Hot Plate Magnetic Stirrer dapat dilihat pada
 20 BAB III METODE PENELITIAN 3.1. Sistem Hot Plate Magnetic Stirrer Berikut sistem dari modul Hot Plate Magnetic Stirrer dapat dilihat pada Gambar 3.1. Gambar 3.1 Diagram Blok alat 20 21 Fungsi masing-masing
20 BAB III METODE PENELITIAN 3.1. Sistem Hot Plate Magnetic Stirrer Berikut sistem dari modul Hot Plate Magnetic Stirrer dapat dilihat pada Gambar 3.1. Gambar 3.1 Diagram Blok alat 20 21 Fungsi masing-masing
III. METODE PENELITIAN. Penelitian ini dilaksanakan mulai pada November 2011 hingga Mei Adapun tempat
 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian ini dilaksanakan mulai pada November 2011 hingga Mei 2012. Adapun tempat pelaksanaan penelitian ini adalah di Laboratorium Elektronika Dasar
III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian ini dilaksanakan mulai pada November 2011 hingga Mei 2012. Adapun tempat pelaksanaan penelitian ini adalah di Laboratorium Elektronika Dasar
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT 3.1 Definisi Perancangan Perancangan adalah proses menuangkan ide dan gagasan berdasarkan teoriteori dasar yang mendukung. Proses perancangan dapat dilakukan dengan cara pemilihan
BAB III PERANCANGAN ALAT 3.1 Definisi Perancangan Perancangan adalah proses menuangkan ide dan gagasan berdasarkan teoriteori dasar yang mendukung. Proses perancangan dapat dilakukan dengan cara pemilihan
BAB II KONSEP DASAR PERANCANGAN
 BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
BAB IV PENGUJIAN DAN ANALISA
 BAB IV PENGUJIAN DAN ANALISA Pada bab ini akan dibahas tentang pengujian berdasarkan perancangan dari sistem yang dibuat. Pengujian ini dilakukan untuk mengetahui kemampuan dari sistem dan untuk mengetahui
BAB IV PENGUJIAN DAN ANALISA Pada bab ini akan dibahas tentang pengujian berdasarkan perancangan dari sistem yang dibuat. Pengujian ini dilakukan untuk mengetahui kemampuan dari sistem dan untuk mengetahui
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam perancangan alat pendeteksi pelanggaran garis putih pada Traffict Light ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahanpermasalahan
BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam perancangan alat pendeteksi pelanggaran garis putih pada Traffict Light ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahanpermasalahan
PERTEMUAN II PEMOGRAMAN INPUT
 PERTEMUAN II PEMOGRAMAN INPUT TUJUAN: - Mahasiswa mampu memprogram mikrokontroller untuk menerima Informasi dari perangkat input yaitu switch, potensiometer, LDR, phototransistor, mic. PENGENALAN MIKROKONTROLER
PERTEMUAN II PEMOGRAMAN INPUT TUJUAN: - Mahasiswa mampu memprogram mikrokontroller untuk menerima Informasi dari perangkat input yaitu switch, potensiometer, LDR, phototransistor, mic. PENGENALAN MIKROKONTROLER
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
III. METODE PENELITIAN. Pelaksanaan tugas akhir ini dilakukan di Laboratorium Terpadu Jurusan Teknik Elektro
 22 III. METODE PENELITIAN A. Waktu dan Tempat. Pelaksanaan tugas akhir ini dilakukan di Laboratorium Terpadu Jurusan Teknik Elektro Fakultas Tekik, Universitas Lampung, yang dilaksanakan mulai bulan Oktober
22 III. METODE PENELITIAN A. Waktu dan Tempat. Pelaksanaan tugas akhir ini dilakukan di Laboratorium Terpadu Jurusan Teknik Elektro Fakultas Tekik, Universitas Lampung, yang dilaksanakan mulai bulan Oktober
kali tombol ON ditekan untuk memulai proses menghidupkan alat. Setting
 27 BAB III METODOLOGI 3.1 Diagram Blok dan Cara Kerja Diagram blok dan cara kerja dapat dilihat pada gambar 3.1. Gambar 3.1. Blok diagram Prototipe Blood warmer Tegangan PLN diturunkan dan disearahkan
27 BAB III METODOLOGI 3.1 Diagram Blok dan Cara Kerja Diagram blok dan cara kerja dapat dilihat pada gambar 3.1. Gambar 3.1. Blok diagram Prototipe Blood warmer Tegangan PLN diturunkan dan disearahkan
BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM. secara otomatis. Sistem ini dibuat untuk mempermudah user dalam memilih
 BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM 3.1 Model Penelitian Pada perancangan tugas akhir ini menggunakan metode pemilihan locker secara otomatis. Sistem ini dibuat untuk mempermudah user dalam
BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM 3.1 Model Penelitian Pada perancangan tugas akhir ini menggunakan metode pemilihan locker secara otomatis. Sistem ini dibuat untuk mempermudah user dalam
BAB III PERANCANGAN ALAT DAN PROGRAM
 BAB III PERANCANGAN ALAT DAN PROGRAM 3.1. Layout Single Line Diagram 220VAC D1 U1 TR1 R1 C1 C2 D2 R2 R3 8 U2 2 3 7 4 D3 VR1 D4 VR2 LCD 31-AGND 30-AVCC 29-PC7 (TOSC2) 28-PC6 (TOSC1) 24-PC2 22-PC0 40 39
BAB III PERANCANGAN ALAT DAN PROGRAM 3.1. Layout Single Line Diagram 220VAC D1 U1 TR1 R1 C1 C2 D2 R2 R3 8 U2 2 3 7 4 D3 VR1 D4 VR2 LCD 31-AGND 30-AVCC 29-PC7 (TOSC2) 28-PC6 (TOSC1) 24-PC2 22-PC0 40 39
BAB III METODE PENELITIAN. Microco ntroller ATMeg a 16. Program. Gambar 3.1 Diagram Blok sterilisator UV
 25 BAB III METODE PENELITIAN 3.1. Diagram Blok Sterilisator UV STAR 1,3,6 jam Microco ntroller ATMeg a 16 Driver Lampu LCD Lampu On Hourmeter RESET Driver Buzzer Buzzer Program Gambar 3.1 Diagram Blok
25 BAB III METODE PENELITIAN 3.1. Diagram Blok Sterilisator UV STAR 1,3,6 jam Microco ntroller ATMeg a 16 Driver Lampu LCD Lampu On Hourmeter RESET Driver Buzzer Buzzer Program Gambar 3.1 Diagram Blok
Gambar 3.1 Blok Diagram Sistem
 BAB III SISTEM PERANCANGAN DAN PEMBUATAN Untuk mempermudah perancangan alat digunakan diagram blok sebagai langkah awal pembuatan alat. Diagram blok menggambarkan secara umum cara kerja rangkaian secara
BAB III SISTEM PERANCANGAN DAN PEMBUATAN Untuk mempermudah perancangan alat digunakan diagram blok sebagai langkah awal pembuatan alat. Diagram blok menggambarkan secara umum cara kerja rangkaian secara
BAB 3 PERANCANGAN SISTEM
 BAB 3 PERANCANGAN SISTEM 3.1 Perancangan Perangkat Keras Modul Sensor Warna (TCS 3200) Driver H Bridge Motor DC Conveyor Mikrokont roller LCD ATMega 8535 Gambar 3.1 Blok Diagram Perangkat Keras 29 30 Keterangan
BAB 3 PERANCANGAN SISTEM 3.1 Perancangan Perangkat Keras Modul Sensor Warna (TCS 3200) Driver H Bridge Motor DC Conveyor Mikrokont roller LCD ATMega 8535 Gambar 3.1 Blok Diagram Perangkat Keras 29 30 Keterangan
PEMBUATAN GELANG ULTRASONIK UNTUK ALAT BANTU MOBILITAS TUNANETRA MENGGUNAKAN MIKROKONTROLER ATMEGA8
 PEMBUATAN GELANG ULTRASONIK UNTUK ALAT BANTU MOBILITAS TUNANETRA MENGGUNAKAN MIKROKONTROLER ATMEGA8 Nuzul Imam Fadlilah AMIK BSI Bekasi Jl. Raya Kaliabang No.8, Perwira, Bekasi Utara nuzul.nfh@bsi.ac.id
PEMBUATAN GELANG ULTRASONIK UNTUK ALAT BANTU MOBILITAS TUNANETRA MENGGUNAKAN MIKROKONTROLER ATMEGA8 Nuzul Imam Fadlilah AMIK BSI Bekasi Jl. Raya Kaliabang No.8, Perwira, Bekasi Utara nuzul.nfh@bsi.ac.id
BAB III METODOLOGI PENELITIAN
 BAB III METODOLOGI PENELITIAN 3.1 Diagram Blok Sistem pr Bateray/ accu Program Power supply Setting timer maksimal 15 menit Start Atmega 16 Display Driver Lampu Reset Gambar 3.1 Diagram Blok Sistem Accu
BAB III METODOLOGI PENELITIAN 3.1 Diagram Blok Sistem pr Bateray/ accu Program Power supply Setting timer maksimal 15 menit Start Atmega 16 Display Driver Lampu Reset Gambar 3.1 Diagram Blok Sistem Accu
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN 3.1 Tempat dan Waktu Penelitian Kegiatan penelitian ini dilakukan pada bulan Desember 2011 sampai dengan bulan Juli 2012 yang dilaksanakan di laboratorium Elektronika dan Robotika
BAB III METODE PENELITIAN 3.1 Tempat dan Waktu Penelitian Kegiatan penelitian ini dilakukan pada bulan Desember 2011 sampai dengan bulan Juli 2012 yang dilaksanakan di laboratorium Elektronika dan Robotika
BAB III METODOLOGI PENELITIAN Diagram Blok Untuk blok diagram dapat dilihat pada gambar 3.1. di bawah ini:
 22 BAB III METODOLOGI PENELITIAN 3.1. Diagram Blok Untuk blok diagram dapat dilihat pada gambar 3.1. di bawah ini: Sensor infrared Mikrokontroler Atmega 8535 Driver UV Driver dryer Lampu UV Dryer Sensor
22 BAB III METODOLOGI PENELITIAN 3.1. Diagram Blok Untuk blok diagram dapat dilihat pada gambar 3.1. di bawah ini: Sensor infrared Mikrokontroler Atmega 8535 Driver UV Driver dryer Lampu UV Dryer Sensor
BAB 3 PERANCANGAN SISTEM. Di bawah ini adalah blok diagram dari perancangan alat sensor keamanan menggunakan PIR (Passive Infrared).
.") 30 BAB 3 PERANCANGAN SISTEM 3.1 Diagram Blok Rangkaian Di bawah ini adalah blok diagram dari perancangan alat sensor keamanan menggunakan PIR (Passive Infrared). Buzzer PIR (Passive Infra Red) Mikrokontroler
30 BAB 3 PERANCANGAN SISTEM 3.1 Diagram Blok Rangkaian Di bawah ini adalah blok diagram dari perancangan alat sensor keamanan menggunakan PIR (Passive Infrared). Buzzer PIR (Passive Infra Red) Mikrokontroler
BAB III PERANCANGAN SISTEM
 20 BAB III PERANCANGAN SISTEM 3.1 Perencanaan Secara Diagram Blok Untuk dapat melakukan perancangan alat Water Bath, maka penulis memulai dengan perancangan blok diagram yang tertera pada gambar dibawah.
20 BAB III PERANCANGAN SISTEM 3.1 Perencanaan Secara Diagram Blok Untuk dapat melakukan perancangan alat Water Bath, maka penulis memulai dengan perancangan blok diagram yang tertera pada gambar dibawah.
PERTEMUAN IV PEMOGRAMAN SEVEN SEGMEN DAN LCD
 PERTEMUAN IV PEMOGRAMAN SEVEN SEGMEN DAN LCD TUJUAN: - Mahasiswa mampu memprogram mikrokontroller untuk menampilkan Informasi pada perangkan output Seven Segmen dan LCD. PERALATAN: Modul-modul/perangkat
PERTEMUAN IV PEMOGRAMAN SEVEN SEGMEN DAN LCD TUJUAN: - Mahasiswa mampu memprogram mikrokontroller untuk menampilkan Informasi pada perangkan output Seven Segmen dan LCD. PERALATAN: Modul-modul/perangkat
PEMROGRAMAN ROBOT PENJEJAK GARIS BERBASIS MIKROKONTROLER
 PEMROGRAMAN ROBOT PENJEJAK GARIS BERBASIS MIKROKONTROLER Oleh : Ihyauddin, S.Kom Disampaikan pada : Pelatihan Pemrograman Robot Penjejak Garis bagi Siswa SMA Negeri 9 Surabaya Tanggal 3 Nopember 00 S SISTEM
PEMROGRAMAN ROBOT PENJEJAK GARIS BERBASIS MIKROKONTROLER Oleh : Ihyauddin, S.Kom Disampaikan pada : Pelatihan Pemrograman Robot Penjejak Garis bagi Siswa SMA Negeri 9 Surabaya Tanggal 3 Nopember 00 S SISTEM
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISEM 3.1. Perancangan Perangkat Keras Blok diagram yang dibuat pada perancangan tugas akhir ini secara keseluruhan dapat dilihat pada gambar 3.1. Keypad Sensor 1 Sensor 2 Sensor 3
BAB III PERANCANGAN SISEM 3.1. Perancangan Perangkat Keras Blok diagram yang dibuat pada perancangan tugas akhir ini secara keseluruhan dapat dilihat pada gambar 3.1. Keypad Sensor 1 Sensor 2 Sensor 3
BAB III PERANCANGAN. Pada bab ini akan dibahas mengenai beberapa hal dasar tentang bagaimana. simulasi mobil automatis dirancang, diantaranya adalah :
 BAB III PERANCANGAN Pada bab ini akan dibahas mengenai beberapa hal dasar tentang bagaimana simulasi mobil automatis dirancang, diantaranya adalah : 1. Menentukan tujuan dan kondisi pembuatan simulasi
BAB III PERANCANGAN Pada bab ini akan dibahas mengenai beberapa hal dasar tentang bagaimana simulasi mobil automatis dirancang, diantaranya adalah : 1. Menentukan tujuan dan kondisi pembuatan simulasi
DAFTAR PUSTAKA. Atmel. Microcontroller, All Data Sheet, 2010 Cahttophadyay, D, Dasar Elektronika, penerjemahsutanto UI Press, Jakarta Indonesia
 DAFTAR PUSTAKA Atmel. Microcontroller, All Data Sheet, 2010 Cahttophadyay, D, Dasar Elektronika, penerjemahsutanto UI Press, Jakarta Indonesia Fairchild, Data Sheet IC Regulator, 2010 Iswanto,. Design
DAFTAR PUSTAKA Atmel. Microcontroller, All Data Sheet, 2010 Cahttophadyay, D, Dasar Elektronika, penerjemahsutanto UI Press, Jakarta Indonesia Fairchild, Data Sheet IC Regulator, 2010 Iswanto,. Design
BAB III DESKRIPSI DAN PERANCANGAN SISTEM
 BAB III DESKRIPSI DAN PERANCANGAN SISTEM 3.1. DESKRIPSI KERJA SISTEM Gambar 3.1. Blok diagram sistem Satelit-satelit GPS akan mengirimkan sinyal-sinyal secara kontinyu setiap detiknya. GPS receiver akan
BAB III DESKRIPSI DAN PERANCANGAN SISTEM 3.1. DESKRIPSI KERJA SISTEM Gambar 3.1. Blok diagram sistem Satelit-satelit GPS akan mengirimkan sinyal-sinyal secara kontinyu setiap detiknya. GPS receiver akan
BAB III METODE PERANCANGAN. tabung V maka penulis membuat diagram dan mekanis system sebagai
 BAB III METODE PERANCANGAN 3.1 Diagram Mekanis Sistem Untuk memudahkan dalam pembuatan alat Mixer menggunakan tabung V maka penulis membuat diagram dan mekanis system sebagai gambaran ketika melakukan
BAB III METODE PERANCANGAN 3.1 Diagram Mekanis Sistem Untuk memudahkan dalam pembuatan alat Mixer menggunakan tabung V maka penulis membuat diagram dan mekanis system sebagai gambaran ketika melakukan
BAB III PERANCANGAN SISTEM. Secara garis besar rangkaian pengendali peralatan elektronik dengan. blok rangkaian tampak seperti gambar berikut :
 BAB III PERANCANGAN SISTEM 3.1. Diagram Blok Secara garis besar rangkaian pengendali peralatan elektronik dengan menggunakan PC, memiliki 6 blok utama, yaitu personal komputer (PC), Mikrokontroler AT89S51,
BAB III PERANCANGAN SISTEM 3.1. Diagram Blok Secara garis besar rangkaian pengendali peralatan elektronik dengan menggunakan PC, memiliki 6 blok utama, yaitu personal komputer (PC), Mikrokontroler AT89S51,
BAB III PERANCANGAN DAN PEMBUATAN
 BAB III PERANCANGAN DAN PEMBUATAN 3.1. Diagram Blok Sistem Suplly Display Card RF RFID Atmega328 Buzzer Driver motor Motor Gambar 3.1 Diagram blok system 3.1.1. Fungsi-fungsi diagram blok 1. Blok card
BAB III PERANCANGAN DAN PEMBUATAN 3.1. Diagram Blok Sistem Suplly Display Card RF RFID Atmega328 Buzzer Driver motor Motor Gambar 3.1 Diagram blok system 3.1.1. Fungsi-fungsi diagram blok 1. Blok card
BAB IV PENGUJIAN DAN ANALISA DATA
 BAB IV PENGUJIAN DAN ANALISA DATA Pada bab ini akan dibahas tentang pengujian dan pengoperasian Sistem Pemantau Ketinggian Air Cooling Tower di PT. Dynaplast. Pengujian dan pengoperasian ini dilakukan
BAB IV PENGUJIAN DAN ANALISA DATA Pada bab ini akan dibahas tentang pengujian dan pengoperasian Sistem Pemantau Ketinggian Air Cooling Tower di PT. Dynaplast. Pengujian dan pengoperasian ini dilakukan
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 27 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1. Umum Didalam perancangan alat dirancang sebuah alat simulator penghitung orang masuk dan keluar gedung menggunakan Mikrokontroler Atmega 16. Inti dari cara
27 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1. Umum Didalam perancangan alat dirancang sebuah alat simulator penghitung orang masuk dan keluar gedung menggunakan Mikrokontroler Atmega 16. Inti dari cara
BAB IV PEMBAHASAN ALAT
 BAB IV PEMBAHASAN ALAT Pada bab pembahasan alat ini penulis akan menguraikan mengenai pengujian dan analisa prototipe. Untuk mendukung pengujian dan analisa modul terlebih dahulu penulis akan menguraikan
BAB IV PEMBAHASAN ALAT Pada bab pembahasan alat ini penulis akan menguraikan mengenai pengujian dan analisa prototipe. Untuk mendukung pengujian dan analisa modul terlebih dahulu penulis akan menguraikan
III. METODE PENELITIAN. Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Agustus
 III. METODE PENELITIAN A. Tempat dan Waktu Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Agustus 2009, dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium Sistem
III. METODE PENELITIAN A. Tempat dan Waktu Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Agustus 2009, dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium Sistem
DAFTAR PUSTAKA. [2]. Agfianto Eko Putra, 2010, Modul Pelatihan Mikrokontroler Atmel AVR,
![DAFTAR PUSTAKA. [2]. Agfianto Eko Putra, 2010, Modul Pelatihan Mikrokontroler Atmel AVR,](/thumbs/58/41892158.jpg "DAFTAR PUSTAKA. [2]. Agfianto Eko Putra, 2010, Modul Pelatihan Mikrokontroler Atmel AVR,") DAFTAR PUSTAKA [1]. Anonim, Elektronika Dasar-Thyristor.pdf, http://student.eepis-its.edu/~robobip/semester%201%20dan%202/thyristor.pdf [2]. Agfianto Eko Putra, 2010, Modul Pelatihan Mikrokontroler Atmel
DAFTAR PUSTAKA [1]. Anonim, Elektronika Dasar-Thyristor.pdf, http://student.eepis-its.edu/~robobip/semester%201%20dan%202/thyristor.pdf [2]. Agfianto Eko Putra, 2010, Modul Pelatihan Mikrokontroler Atmel
IV. HASIL PENELITIAN DAN PEMBAHASAN. menggunakan sensor optik berbasis mikrokontroler ATMega 8535 dengan
 IV. HASIL PENELITIAN DAN PEMBAHASAN A. Hasil Penelitian Telah direalisasikan alat ukur massa jenis minyak kelapa sawit menggunakan sensor optik berbasis mikrokontroler ATMega 8535 dengan tampilan ke komputer.
IV. HASIL PENELITIAN DAN PEMBAHASAN A. Hasil Penelitian Telah direalisasikan alat ukur massa jenis minyak kelapa sawit menggunakan sensor optik berbasis mikrokontroler ATMega 8535 dengan tampilan ke komputer.
BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS
 BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS 3.1. Pendahuluan Perangkat pengolah sinyal yang dikembangkan pada tugas sarjana ini dirancang dengan tiga kanal masukan. Pada perangkat pengolah sinyal
BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS 3.1. Pendahuluan Perangkat pengolah sinyal yang dikembangkan pada tugas sarjana ini dirancang dengan tiga kanal masukan. Pada perangkat pengolah sinyal
BAB III ANALISIS DAN DESAIN SISTEM
 BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan alat pengontrol pengaman pintu ruangan menggunakan Mikrokontroler dengan komunikasi bluetooth dan aplikasi Android menggunakan
BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan alat pengontrol pengaman pintu ruangan menggunakan Mikrokontroler dengan komunikasi bluetooth dan aplikasi Android menggunakan
BAB IV PENGUJIAN ALAT DAN ANALISA HASIL PENGUJIAN
 35 BAB IV PENGUJIAN ALAT DAN ANALISA HASIL PENGUJIAN Pada bab ini dilakukan proses akhir dari pembuatan alat Tugas Akhir, yaitu pengujian alat yang telah selesai dirakit. Tujuan dari proses ini yaitu agar
35 BAB IV PENGUJIAN ALAT DAN ANALISA HASIL PENGUJIAN Pada bab ini dilakukan proses akhir dari pembuatan alat Tugas Akhir, yaitu pengujian alat yang telah selesai dirakit. Tujuan dari proses ini yaitu agar
III. METODOLOGI PENELITIAN. Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009
 III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
BAB II DASAR TEORI. AVR(Alf and Vegard s Risc processor) ATMega32 merupakan 8 bit mikrokontroler berteknologi RISC (Reduce Instruction Set Computer).
 ATMega32 merupakan 8 bit mikrokontroler berteknologi RISC (Reduce Instruction Set Computer).") BAB II DASAR TEORI Bab ini menjelaskan konsep dan teori dasar yang mendukung perancangan dan realisasi sistem. Penjelasan ini meliputi mikrokontroler AVR, perangkat sensor, radio frequency, RTC (Real Time
BAB II DASAR TEORI Bab ini menjelaskan konsep dan teori dasar yang mendukung perancangan dan realisasi sistem. Penjelasan ini meliputi mikrokontroler AVR, perangkat sensor, radio frequency, RTC (Real Time
BAB III METODOLOGI PENELITIAN
 BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram LCD RESET UP DOWN ENTER Mikro Kontroller ATMEGA 16 DRIVER MOTOR DRIVER BUZER BUZER MOTOR BACK Gambar 3.1 Blok Diagram Stirrer Magnetic Fungsi masing-masing
BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram LCD RESET UP DOWN ENTER Mikro Kontroller ATMEGA 16 DRIVER MOTOR DRIVER BUZER BUZER MOTOR BACK Gambar 3.1 Blok Diagram Stirrer Magnetic Fungsi masing-masing
BAB III PERANCANGAN ALAT DAN PROGRAM MIKROKONTROLER. program pada software Code Vision AVR dan penanaman listing program pada
 BAB III PERANCANGAN ALAT DAN PROGRAM MIKROKONTROLER Pada tahap perancangan ini dibagi menjadi 2 tahap perancangan. Tahap pertama adalah perancangan perangkat keras (hardware), yang meliputi rangkaian rangkaian
BAB III PERANCANGAN ALAT DAN PROGRAM MIKROKONTROLER Pada tahap perancangan ini dibagi menjadi 2 tahap perancangan. Tahap pertama adalah perancangan perangkat keras (hardware), yang meliputi rangkaian rangkaian
diajukan oleh Irfan Al Ghazali Ibrahim
 PEMANFAATAN INFRARED DAN REED SWITCH PADA SIMULASI OTOMATISASI PALANG PINTU KERETA API MENGGUNAKAN MIKROKONTROLER ATMEGA16 NASKAH PUBLIKASI diajukan oleh Irfan Al Ghazali Ibrahim 06.11.1113 kepada SEKOLAH
PEMANFAATAN INFRARED DAN REED SWITCH PADA SIMULASI OTOMATISASI PALANG PINTU KERETA API MENGGUNAKAN MIKROKONTROLER ATMEGA16 NASKAH PUBLIKASI diajukan oleh Irfan Al Ghazali Ibrahim 06.11.1113 kepada SEKOLAH
SEBAGAI SENSOR CAHAYA DAN SENSOR SUHU PADA MODEL SISTEM PENGERING OTOMATIS PRODUK PERTANIAN BERBASIS ATMEGA8535
 3 PENERAPAN FILM Ba 0,55 Sr 0,45 TiO 3 (BST) SEBAGAI SENSOR CAHAYA DAN SENSOR SUHU PADA MODEL SISTEM PENGERING OTOMATIS PRODUK PERTANIAN BERBASIS ATMEGA8535 23 Pendahuluan Indonesia sebagai negara agraris
3 PENERAPAN FILM Ba 0,55 Sr 0,45 TiO 3 (BST) SEBAGAI SENSOR CAHAYA DAN SENSOR SUHU PADA MODEL SISTEM PENGERING OTOMATIS PRODUK PERTANIAN BERBASIS ATMEGA8535 23 Pendahuluan Indonesia sebagai negara agraris
BAB IV PENGUJIAN DAN ANALISA
 83 BAB IV PENGUJIAN DAN ANALISA 4.1. Tujuan Pengujian Pengujian yang akan dilakukan untuk mengetahui apakah sistem sudah berjalan sesuai dengan perencanaan yang telah dibuat. Pengujian dilakukan pada beberapa
83 BAB IV PENGUJIAN DAN ANALISA 4.1. Tujuan Pengujian Pengujian yang akan dilakukan untuk mengetahui apakah sistem sudah berjalan sesuai dengan perencanaan yang telah dibuat. Pengujian dilakukan pada beberapa
III. METODE PENELITIAN. Penelitian dan perancangan tugas akhir ini dilakukan di Laboratorium Terpadu
 37 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian dan perancangan tugas akhir ini dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung dan dilaksanakan mulai bulan Maret 2012 sampai
37 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian dan perancangan tugas akhir ini dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung dan dilaksanakan mulai bulan Maret 2012 sampai
BAB IV HASIL DAN UJI COBA
 BAB IV HASIL DAN UJI COBA IV. Hasil Dalam Bab ini akan dibahas tentang pengujian berdasarkan perencanaan dari sistem yang dibuat. Program pengujian disimulasikan di suatu sistem yang sesuai. Pengujian
BAB IV HASIL DAN UJI COBA IV. Hasil Dalam Bab ini akan dibahas tentang pengujian berdasarkan perencanaan dari sistem yang dibuat. Program pengujian disimulasikan di suatu sistem yang sesuai. Pengujian
BAB III METODOLOGI PENELITIAN
 BAB III METODOLOGI PENELITIAN 3.1 Perancangan Diagram Mekanik 1. Tampak Depan dan Belakang Gambar 3.1 Tampilan Depan dan Belakang Keterangan gambar : = tombol start = tombol up = tombol down = tombol stop
BAB III METODOLOGI PENELITIAN 3.1 Perancangan Diagram Mekanik 1. Tampak Depan dan Belakang Gambar 3.1 Tampilan Depan dan Belakang Keterangan gambar : = tombol start = tombol up = tombol down = tombol stop
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Masalah Dalam bab ini akan dibahas masalah-masalah yang muncul dalam perancangan alat dan aplikasi program, serta pemecahan-pemecahan dari masalah yang
BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Masalah Dalam bab ini akan dibahas masalah-masalah yang muncul dalam perancangan alat dan aplikasi program, serta pemecahan-pemecahan dari masalah yang
BLOK DIAGRAM DAN GAMBAR RANGKAIAN
 BAB III BLOK DIAGRAM DAN GAMBAR RANGKAIAN 3.1 Blok Diagram SWITCH BUZZER MIKROKONTROLLER AT89S52 DTMF DECODER KUNCI ELEKTRONIK POWER SUPPLY 1 2 3 4 5 6 7 8 9 * 0 # KEYPAD 43 3.2 Gambar Rangkaian 44 3.3
BAB III BLOK DIAGRAM DAN GAMBAR RANGKAIAN 3.1 Blok Diagram SWITCH BUZZER MIKROKONTROLLER AT89S52 DTMF DECODER KUNCI ELEKTRONIK POWER SUPPLY 1 2 3 4 5 6 7 8 9 * 0 # KEYPAD 43 3.2 Gambar Rangkaian 44 3.3
BAB III METODOLOGI PENELITIAN. Adapun blok diagram modul baby incubator ditunjukkan pada Gambar 3.1.
 23 BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram Modul Baby Incubator Adapun blok diagram modul baby incubator ditunjukkan pada Gambar 3.1. PLN THERMOSTAT POWER SUPPLY FAN HEATER DRIVER HEATER DISPLAY
23 BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram Modul Baby Incubator Adapun blok diagram modul baby incubator ditunjukkan pada Gambar 3.1. PLN THERMOSTAT POWER SUPPLY FAN HEATER DRIVER HEATER DISPLAY
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan Alat Pengaduk Adonan Kue ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan tersebut antara
BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan Alat Pengaduk Adonan Kue ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan tersebut antara
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada Bab III ini akan diuraikan mengenai perancangan perangkat keras dan perangkat lunak yang digunakan untuk membangun sistem keamanan rumah nirkabel berbasis mikrokontroler
BAB III PERANCANGAN SISTEM Pada Bab III ini akan diuraikan mengenai perancangan perangkat keras dan perangkat lunak yang digunakan untuk membangun sistem keamanan rumah nirkabel berbasis mikrokontroler
BAB III METODE PENELITIAN
 21 BAB III METODE PENELITIAN 3.1 Alat dan Bahan 3.1.1 Alat 1. Toolset 2. Solder 3. Amplas 4. Bor Listrik 5. Cutter 6. Multimeter 3.1.2 Bahan 1. Trafo tipe CT 220VAC Step down 2. Dioda bridge 3. Dioda bridge
21 BAB III METODE PENELITIAN 3.1 Alat dan Bahan 3.1.1 Alat 1. Toolset 2. Solder 3. Amplas 4. Bor Listrik 5. Cutter 6. Multimeter 3.1.2 Bahan 1. Trafo tipe CT 220VAC Step down 2. Dioda bridge 3. Dioda bridge
BAB III METODE PENELITIAN
 3.1. Diagram Blok Keseluruhan BAB III METODE PENELITIAN 3.1 : Berikut ini adalah diagram blok keseluruhan yang ditunjukan pada gambar Start Studi Literatur Perancangan Alat Simulasi Alat T Jalan? Tidak
3.1. Diagram Blok Keseluruhan BAB III METODE PENELITIAN 3.1 : Berikut ini adalah diagram blok keseluruhan yang ditunjukan pada gambar Start Studi Literatur Perancangan Alat Simulasi Alat T Jalan? Tidak
BAB III ANALISIS DAN PERANCANGAN SISTEM. komputer, program yang dibuat menggunakan bahasa pemrograman berbasis
 BAB III ANALISIS DAN PERANCANGAN SISTEM 3.1 Model Pengembangan Dalam sistem perancangan ini awal mula program dibuat pada personal komputer, program yang dibuat menggunakan bahasa pemrograman berbasis
BAB III ANALISIS DAN PERANCANGAN SISTEM 3.1 Model Pengembangan Dalam sistem perancangan ini awal mula program dibuat pada personal komputer, program yang dibuat menggunakan bahasa pemrograman berbasis
USER MANUAL PALANGAN KERETA API OTOMATIS MATA DIKLAT : SISTEM PENGENDALI ELEKTRONIKA
 USER MANUAL PALANGAN KERETA API OTOMATIS MATA DIKLAT : SISTEM PENGENDALI ELEKTRONIKA SISWA KELAS XII TAHUNAJARAN 2010/2011 JURUSAN TEKNIK ELEKTRONIKA INDUSTRI SMK NEGERI 3 BOYOLANGU TULUNGAGUNG CREW 2
USER MANUAL PALANGAN KERETA API OTOMATIS MATA DIKLAT : SISTEM PENGENDALI ELEKTRONIKA SISWA KELAS XII TAHUNAJARAN 2010/2011 JURUSAN TEKNIK ELEKTRONIKA INDUSTRI SMK NEGERI 3 BOYOLANGU TULUNGAGUNG CREW 2
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1. Perancangan Alat 3.1.1. Blok Diagram Blok kontrol sistem penjejak matahari 4 arah adalah sebagai berikut : Gambar 3.1 Blok Perancangan Sistem Kontrol Sistem
BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1. Perancangan Alat 3.1.1. Blok Diagram Blok kontrol sistem penjejak matahari 4 arah adalah sebagai berikut : Gambar 3.1 Blok Perancangan Sistem Kontrol Sistem
USER MANUAL PINTU GESER OTOMATIS MATA DIKLAT:SISTEM PENGENDALI ELEKTRONIKA
 USER MANUAL PINTU GESER OTOMATIS MATA DIKLAT:SISTEM PENGENDALI ELEKTRONIKA SISWA TEKNIK ELEKTRONIKA INDUSTRI 2 JURUSAN TEKNIK ELEKTRONIKA INDUSTRI SEKOLAH MENENGAH KEJURUAN SMK NEGERI 3 BOYOLANGU CREW
USER MANUAL PINTU GESER OTOMATIS MATA DIKLAT:SISTEM PENGENDALI ELEKTRONIKA SISWA TEKNIK ELEKTRONIKA INDUSTRI 2 JURUSAN TEKNIK ELEKTRONIKA INDUSTRI SEKOLAH MENENGAH KEJURUAN SMK NEGERI 3 BOYOLANGU CREW
BAB IV PEMBAHASAN Rancangan alat Pengukur panjang Terpal. Push Button. Gambar 4.1 Diagram Pengukur Panjang Terpal
 34 BAB IV PEMBAHASAN 4.1 Identifikasi Masalah Dalam proses produksi hal yang paling menonjol untuk menghasilkan suatu barang produksi yang memiliki kualitas yang bagus ialah bahan dan mesin yang digunakan.
34 BAB IV PEMBAHASAN 4.1 Identifikasi Masalah Dalam proses produksi hal yang paling menonjol untuk menghasilkan suatu barang produksi yang memiliki kualitas yang bagus ialah bahan dan mesin yang digunakan.
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Didalam merancang sistem yang akan dibuat ada beberapa hal yang perlu diperhatikan sebelumnya, pertama-tama mengetahui prinsip kerja secara umum dari sistem yang akan dibuat
BAB III PERANCANGAN SISTEM Didalam merancang sistem yang akan dibuat ada beberapa hal yang perlu diperhatikan sebelumnya, pertama-tama mengetahui prinsip kerja secara umum dari sistem yang akan dibuat
BAB I PENDAHULUAN. A. Latar Belakang. Transportasi adalah sarana bagi manusia untuk memindahkan sesuatu, baik
 BAB I PENDAHULUAN A. Latar Belakang Transportasi adalah sarana bagi manusia untuk memindahkan sesuatu, baik manusia atau benda dari satu tempat ke tempat lain, dengan ataupun tanpa mempergunakan alat bantu.
BAB I PENDAHULUAN A. Latar Belakang Transportasi adalah sarana bagi manusia untuk memindahkan sesuatu, baik manusia atau benda dari satu tempat ke tempat lain, dengan ataupun tanpa mempergunakan alat bantu.
BAB IV PEMBAHASAN Rancangan Mesin Panjang Terpal PUSH BUTTON. ATMega 128 (Kendali Kecepatan Motor Dua Arah)
") BAB IV PEMBAHASAN 4.1 Identifikasi Masalah Dalam proses produksi hal yang paling menonjol untuk menghasilkan suatu barang produksi yang memiliki kualitas yang bagus adalah bahan dan mesin yang digunakan.
BAB IV PEMBAHASAN 4.1 Identifikasi Masalah Dalam proses produksi hal yang paling menonjol untuk menghasilkan suatu barang produksi yang memiliki kualitas yang bagus adalah bahan dan mesin yang digunakan.
BAB III PERANCANGAN DAN KERJA ALAT
 BAB III PERANCANGAN DAN KERJA ALAT 3.1 DIAGRAM BLOK sensor optocoupler lantai 1 POWER SUPPLY sensor optocoupler lantai 2 sensor optocoupler lantai 3 Tombol lantai 1 Tbl 1 Tbl 2 Tbl 3 DRIVER ATMEGA 8535
BAB III PERANCANGAN DAN KERJA ALAT 3.1 DIAGRAM BLOK sensor optocoupler lantai 1 POWER SUPPLY sensor optocoupler lantai 2 sensor optocoupler lantai 3 Tombol lantai 1 Tbl 1 Tbl 2 Tbl 3 DRIVER ATMEGA 8535
BAB V HASIL DAN PEMBAHASAN. Pengujian dilakukan terhadap 8 sensor photodioda. mendeteksi garis yang berwarna putih dan lapangan yang berwarna hijau.
 BAB V HASIL DAN PEMBAHASAN 5.1 Pengujian Sensor Photodioda 5.1.1 Tujuan Pengujian dilakukan terhadap 8 sensor photodioda. Adapun tujuan dari pengujian sensor photodioda adalah digunakan untuk mendeteksi
BAB V HASIL DAN PEMBAHASAN 5.1 Pengujian Sensor Photodioda 5.1.1 Tujuan Pengujian dilakukan terhadap 8 sensor photodioda. Adapun tujuan dari pengujian sensor photodioda adalah digunakan untuk mendeteksi
BAB IV UJI COBA DAN ANALISIS SISTEM
 BAB IV UJI COBA DAN ANALISIS SISTEM Untuk mengetahui kehandalan dan keberhasilan dari sistem yang kita buat, maka diperlukan pengujian terhadap terhadap komponen komponen pembangun sistem terutama sensor
BAB IV UJI COBA DAN ANALISIS SISTEM Untuk mengetahui kehandalan dan keberhasilan dari sistem yang kita buat, maka diperlukan pengujian terhadap terhadap komponen komponen pembangun sistem terutama sensor
ABSTRAK. Universitas Kristen Maranatha
 ABSTRAK Sistem sensor infra merah terdiri dari LED infra merah dan fotodioda. Fotodioda merupakan detektor cahaya infra merah yang dibantu penguat transistor. Dalam perancangan ini digunakan untuk mendeteksi
ABSTRAK Sistem sensor infra merah terdiri dari LED infra merah dan fotodioda. Fotodioda merupakan detektor cahaya infra merah yang dibantu penguat transistor. Dalam perancangan ini digunakan untuk mendeteksi
BAB II PENDEKATAN PEMECAHAN MASALAH. Tombol kuis dengan Pengatur dan Penampil Nilai diharapkan memiliki fiturfitur
 6 BAB II PENDEKATAN PEMECAHAN MASALAH A. Tombol Kuis dengan Pengatur dan Penampil Nilai Tombol kuis dengan Pengatur dan Penampil Nilai diharapkan memiliki fiturfitur sebagai berikut: 1. tombol pengolah
6 BAB II PENDEKATAN PEMECAHAN MASALAH A. Tombol Kuis dengan Pengatur dan Penampil Nilai Tombol kuis dengan Pengatur dan Penampil Nilai diharapkan memiliki fiturfitur sebagai berikut: 1. tombol pengolah
Proteus Introduction April 2011 #2 kumpulan materi belajar bareng AVR
 Proteus Introduction April 2011 #2 kumpulan materi belajar bareng AVR LABORATORIUM VIRTUAL KITA Mungkin kita sudah mengenal PSPICE yaitu sebuah software yang dapat melakukan simulasi rangkaian elektronik.
Proteus Introduction April 2011 #2 kumpulan materi belajar bareng AVR LABORATORIUM VIRTUAL KITA Mungkin kita sudah mengenal PSPICE yaitu sebuah software yang dapat melakukan simulasi rangkaian elektronik.
BAB III METODE PENELITIAN. baik pada perangkat keras maupun pada komputer. Buffer. Latch
 BAB III METODE PENELITIAN Metode penelitian yang digunakan dalam perancangan perangkat keras adalah studi kepustakaan berupa data-data literatur dari masing-masing komponen, informasi dari internet dan
BAB III METODE PENELITIAN Metode penelitian yang digunakan dalam perancangan perangkat keras adalah studi kepustakaan berupa data-data literatur dari masing-masing komponen, informasi dari internet dan
BAB III PENGENDALIAN GERAK MEJA KERJA MESIN FRAIS EMCO F3 DALAM ARAH SUMBU X
 BAB III PENGENDALIAN GERAK MEJA KERJA MESIN FRAIS EMCO F3 DALAM ARAH SUMBU X Pada bab ini akan dibahas mengenai diagram alir pembuatan sistem kendali meja kerja mesin frais dalam arah sumbu-x, rangkaian
BAB III PENGENDALIAN GERAK MEJA KERJA MESIN FRAIS EMCO F3 DALAM ARAH SUMBU X Pada bab ini akan dibahas mengenai diagram alir pembuatan sistem kendali meja kerja mesin frais dalam arah sumbu-x, rangkaian
BAB III PERANCANGAN DAN CARA KERJA RANGKAIAN
 BAB III PERANCANGAN DAN CARA KERJA RANGKAIAN 3.1 Diagram Blok Rangkaian Secara Detail Pada rangkaian yang penulis buat berdasarkan cara kerja rangkaian secara keseluruhan penulis membagi rangkaian menjadi
BAB III PERANCANGAN DAN CARA KERJA RANGKAIAN 3.1 Diagram Blok Rangkaian Secara Detail Pada rangkaian yang penulis buat berdasarkan cara kerja rangkaian secara keseluruhan penulis membagi rangkaian menjadi
REFS0-1 (Reference Selection Bits) REFS0-1 adalah bit-bit pengatur mode tegangan referensi ADC.
 REFS0-1 adalah bit-bit pengatur mode tegangan referensi ADC.") JOBSHEET VI MENGGUNAKAN ANALOG TO DIGITAL CONVERTER (ADC) DALAM MIKROKONTROLLER ATMEGA8535 1 TUJUAN Mengetahui dan memahami cara menggunakan ADC yang ada di dalam mikrokontroler. Mengetahui dan memahami
JOBSHEET VI MENGGUNAKAN ANALOG TO DIGITAL CONVERTER (ADC) DALAM MIKROKONTROLLER ATMEGA8535 1 TUJUAN Mengetahui dan memahami cara menggunakan ADC yang ada di dalam mikrokontroler. Mengetahui dan memahami
BAB III PEMBUATAN ALAT DAN IMPLEMENTASI
 BAB III PEMBUATAN ALAT DAN IMPLEMENTASI Perancangan alat pada tugas akhir ini meliputi perangkat keras (hardware) dan perangkat lunak (software). Langkah perancangan yang pertama kali dilakukan adalah
BAB III PEMBUATAN ALAT DAN IMPLEMENTASI Perancangan alat pada tugas akhir ini meliputi perangkat keras (hardware) dan perangkat lunak (software). Langkah perancangan yang pertama kali dilakukan adalah
BAB IV PENGUJIAN DAN PEMBAHASAN. Pengujian ini termasuk pengujian masing-masing bagian secara terpisah dan pengujian
 BAB IV PENGUJIAN DAN PEMBAHASAN Pada bab ini akan dilakukan pengujian terhadap sistem yang telah dibuat. Secara garis besar, terdapat 3 macam pengujian, yaitu: 1. Pengujian hardware (troubleshooting).
BAB IV PENGUJIAN DAN PEMBAHASAN Pada bab ini akan dilakukan pengujian terhadap sistem yang telah dibuat. Secara garis besar, terdapat 3 macam pengujian, yaitu: 1. Pengujian hardware (troubleshooting).