Presentasi Tugas Akhir
|
|
|
- Utami Atmadjaja
- 8 tahun lalu
- Tontonan:
Transkripsi

 Pembimbing: Ir.")
1 Presentasi Tugas Akhir OPTIMASI KONTROLER PID BERBASIS ALGORITMA PARTICLE SWARM OPTIMIZATION UNTUK PENGENDALIAN KECEPATAN MOTOR INDUKSI TIGA FASE Oleh: Suhartono ( ) Pembimbing: Ir. Ali Fatoni, MT


2 Agenda Presentasi
3 Latar Belakang Kontroler PID merupakan kontroler yang paling banyak digunakan di industri hal ini dikarenakan kontroller PID memiliki keunggulan berupa keefektifannya luar biasa, mudah diimplementasikan serta aplikasinya yang sangat luar biasa Masalah utama dalam perancangan kontroller PID adalah proses tuningnya (penentuan nilai Kp, Ki, dan Kd) yang kebanyakan dilakukan secara coba-coba dan membutuhkan waktu yang lama Penggunaan metode komputasi cerdas seperti PSO-PID, GA-PID, ACO-PID, BFO-PID membuka jalan baru bagi metode tuning modern untuk menetukan parameter PID yang optimal, dan metode metode ini dirancang untuk mengatasi sistem yang kompleks
4 Permasalahan Permasalahan pada tugas akhir ini adalah bagaimana membuat inverter tiga fase dengan teknik sinusoidal Pulse Width Modulation untuk memvariasikan putaran motor induksi dengan menggunakan mikrokontroler atmega 32, melakukan identifikasi terhadap plant serta mendapatkan parameter kp,ki dan kd dari metode PSO yang telah dibuat di Matlab, menerapkan hasil parameter yang didapat pada pada plant yang telah dibuat.
5 Pada tugas akhir ini bertujuan untuk mendapatkan hasil yang paling bagus dalam penetuan kriteria yang meliputi setling time, rise time, maximum overshoot, error steady state dari hasil penerapan dua metode dalam menentukan tuning PID dengan menggunakan PSO. Tujuan
6 Pada tugas akhir ini memiliki batasan batasan pengerjaannya di antaranya penghitungan parameter kp, ki dan kd dilakukan secara offline Batasan Masalah
7 PSO didasarkan pada perilaku sebuah kawasan burung atau ikan. Algoritma PSO meniru perilaku sosial organisme ini.. perilaku sosial terdiri dari tindakan individu dan pengaruh dari individu-individu lain dalam sesuatu kelompok kata partikel menunjukkan, misalnya, seekor burung dalam kawanan burung. setiap individu atau partikel berperilaku dengan cara menggunakan kecerdasannya (intelegence) sendiri dan juga dipengaruhi perilaku kelompok kolektifnya. Dengan demikian, jika satu partikel atau seekor burung menemukan jalan yang tepat atau pendek menuju ke sumber makanan, sisa kelompok yang lain juga akan dapat segera mengikuti jalan tersebut meskipun lokasi mereka jauh dari kelompok tersebut. PARTICLE SWARM OPTIMIZATION



8

9 Berikut ini merupakan model matematika yang menggambarkan mekanisme updating status partikel Kennedy dan Eberhert




10
11 1. Pembangkitan populasi awal secara acak. 2. Evaluasi fungsi fitnes. 3. Membandingkan nilai evaluasi fitness dengan pbest. Jika nilai sekarang lebih baik dari pbest, maka set nilai pbest sama dengan nilai sekarang. Dan pbestij(t) sama dengan nilai posisi sekarang pada dimensi j. 4. Identifikasi partikel partikel lain yang mempunyai pbest, jika nilai pbest lebih besar dari gbest, maka set gbest sama dengan pbest. 5. Update nilai kecepatan dan posisi suatu partikel. 6. Mengulangi langkah 2 sampai kriteria telah cocok (mempunyai nilai fitness yang optimum atau jumlah iterasi telah tercapai). Mekanisme PSO
12 Algoritma PSO

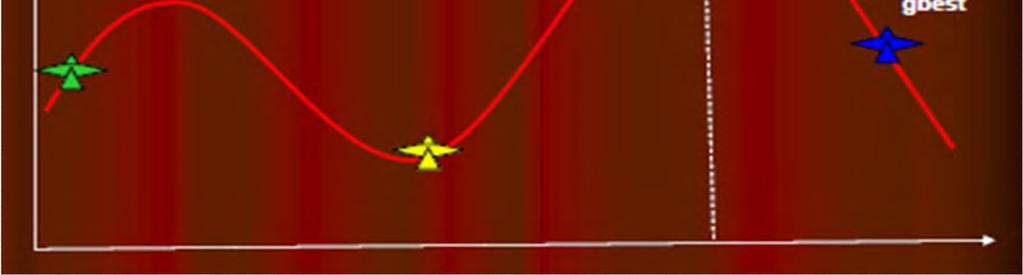
13 Ilustrasi konsep PSO
14 Motor induksi 3 fasa banyak digunakan dalam industri dan dalam penerapan komersial yang membutuhkan kesetimbangan beban dalam sesuatu sistem. Keuntungan motor induksi ini adalah kecepatannya yang konstan pada saat tidak berbeban, turun sedikit (beberapa persen) dari beban nol pada saat dioperasikan dalam keadaan beban nominal dan dapat melakukan start secara mandiri atau self-starting tanpa menggunakan kapasitor, belitan start, sakelar sentrifugal atau peralatan untuk starting lainnya. Motor induksi tiga fase

15 Prinsip kerja Motor Induksi tiga fase
16 Rangkaian yang berfungsi untuk merubah tegangan DC (searah) menjadi tegangan AC (bolak-balik) inverter
17 Vektor tegangan digunakan untuk menetukan penyulutan pada inverter agar mendapatkan tegangan AC 3 fasa. Vektor tegangan
18 Blok diagram
19 Jenis motor ( m ) : 3 fasa Putaran nominal ( n ) : 1500 Rpm Frekwensi ( f ) : 50 Hz Jumlah alur ( G ) : 24 lobang ( alur ) Diameter dalam stator (D1) : 48 mm = 4,8 cm Diameter luar stator (D2) : 90 mm = 9 cm Panjang stator (L) : 51 mm = 5,1 cm Tebal gandar stator (Dy) : 21 mm = 2,1 cm Lebar gigi terkecil (Wts1) : 4 mm = 0,4 cm Jenis gulungan : spiral / rata Sedangkan setelah diukur dan dihitung, motor induksi yang dipakai memiliki data sebagai berikut : Putaran nominal (n) : 1490 rpm Arus / sanggul : A Resistansi / sanggul : 28 Ω Induktansi / sanggul : H Parameter Motor Induksi 3 Fase
20 Dalam perancangan hardware ini akan dibuat sesuatu inverter tiga fase beserta rangkaian pendukung lainnya yang mampu mencatu tegangan tiga fase untuk menggerakkan motor induksi mini. Gambar 3.2 menunjukkan rangkaian secara keseluruhan Inverter 3 Fase. Perancangan hardware inverter
21 Dalam perancangan hardware ini akan dibuat sesuatu inverter tiga fase beserta rangkaian pendukung lainnya yang mampu mencatu tegangan tiga fase untuk menggerakkan motor induksi mini. Gambar 3.2 menunjukkan rangkaian secara keseluruhan Inverter 3 Fase. Perancangan hardware inverter

22 Pengujian untuk penyulut mosfet

23 Pengujian untuk gelombang keluaran inverter
24 0.2173s PID(s) Step s s Add PID Controller Transfer Fcn keluaran1 To Workspace1 1 Out1 u 1 s ea Abs Integrator To Workspace Display s s s Transfer Fcn1 ise ISE 2 Constant uv 1 s Integrator1 Math Function simulasi untuk perhitungan PSO Scope Display1
25 ଶ Model yang didapat
26 200 fu n g s i f itn e s s iterasi Nilai setpoint 1000 RPM 50 populasi 1200 kecepatan referensi kecepatan dengan PSO - PID kecepatan tanpa kontroler iterasi 70 Kp Ki Kd %Mp tr det ts det IAE ESS 0 RPM Final value 1000 RPM k e c e p a ta n (d e t ) Item waktu(det) Iterasi ke 70
27 1200 kecepatan (RPM) ,05 x waktu (detik) Hasil Implementasi
28 1. Dengan menggunakan algoritma particle swarm optimization untuk tunning PID pada kecepatan motor induksi tiga fase dengan wmax = 0,75, wmin = 0,25, iterasi sebanyak 20 dan populasi sebanyak 50 didapatkan Didapatkan Kp=11,2215, ki=2,0873 dan Kd=5, Dari hasil implementasi yang dilakukan bahwa pada saat Kp=11,2215, ki=2,0873 dan Kd=5,4503 didapati rise time sebesar 8,4 detik, overshoot sebesar 2%, setling time sebesar 10,72 detik dan error steady state sebesar 20 RPM. Kesimpulan
29 Dalam pengerjakan dan penyelesaian Proyek Akhir ini tentu tidak lepas dari berbagai macam kekurangan dan kelemahan, baik itu pada sistem maupun pada peralatan yang telah dibuat. Untuk kelanjutan Tugas Akhir yang akan datang agar mempermudah proses pembuatan harap memilih komponen-komponen yang terbaik karena pengaruh komponen sangat besar untuk kelancaran Saran
Optimasi Parameter Kontroler PID Berbasis Particle Swarm Optimization untuk Pengendalian Kecepatan Motor Induksi Tiga Fase
 Optimasi Parameter Kontroler PID Berbasis Particle Swarm Optimization untuk Pengendalian Kecepatan Motor Induksi Tiga Fase Suhartono Jurusan Teknik Elektro, Fakultas Teknologi Industri Institut Teknologi
Optimasi Parameter Kontroler PID Berbasis Particle Swarm Optimization untuk Pengendalian Kecepatan Motor Induksi Tiga Fase Suhartono Jurusan Teknik Elektro, Fakultas Teknologi Industri Institut Teknologi
(Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC)
") (Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC) Latar Belakang Tujuan Tugas Akhir merancang sistem pengendalian kecepatan pada mobil listrik 2 1 Mulai No Uji sistem Studi literatur Marancang
(Dimasyqi Zulkha, Ir. Ya umar MT., Ir Purwadi Agus Darwito, MSC) Latar Belakang Tujuan Tugas Akhir merancang sistem pengendalian kecepatan pada mobil listrik 2 1 Mulai No Uji sistem Studi literatur Marancang
peralatan-peralatan industri maupun rumah tangga seperti pada fan, blower, pumps,
 1.1 Latar Belakang Kebutuhan tenaga listrik meningkat mengikuti perkembangan kehidupan manusia dan pertumbuhan di segala sektor industri yang mengarah ke modernisasi. Dalam sebagian besar industri, sekitar
1.1 Latar Belakang Kebutuhan tenaga listrik meningkat mengikuti perkembangan kehidupan manusia dan pertumbuhan di segala sektor industri yang mengarah ke modernisasi. Dalam sebagian besar industri, sekitar
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER
 KONTROLER") SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
IV. PERANCANGAN SISTEM
 SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC
 Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan membahas tentang pemodelan perancangan sistem, hal ini dilakukan untuk menunjukkan data dan literatur dari rancangan yang akan diteliti. Selain itu, perancangan
BAB III PERANCANGAN SISTEM Pada bab ini akan membahas tentang pemodelan perancangan sistem, hal ini dilakukan untuk menunjukkan data dan literatur dari rancangan yang akan diteliti. Selain itu, perancangan
Hamzah Ahlul Fikri Jurusan Tehnik Elektro, FT, Unesa,
 Pengendalian Kecepatan Motor Induksi Tiga Fasa Menggunakan Kontrol Fuzzy Logic Hamzah Ahlul Fikri Jurusan Tehnik Elektro, FT, Unesa, email: [email protected] Subuh Isnur Haryudo Jurusan Tehnik
Pengendalian Kecepatan Motor Induksi Tiga Fasa Menggunakan Kontrol Fuzzy Logic Hamzah Ahlul Fikri Jurusan Tehnik Elektro, FT, Unesa, email: [email protected] Subuh Isnur Haryudo Jurusan Tehnik
II. PERANCANGAN SISTEM
 Sistem Pengaturan Intensitas Cahaya Dengan Perekayasaan Kondisi Lingkungan Pada Rumah Kaca Alfido, Ir. Purwanto, MT., M.Aziz muslim, ST., MT.,Ph.D. Teknik Elektro Universitas Brawijaya Jalan M.T Haryono
Sistem Pengaturan Intensitas Cahaya Dengan Perekayasaan Kondisi Lingkungan Pada Rumah Kaca Alfido, Ir. Purwanto, MT., M.Aziz muslim, ST., MT.,Ph.D. Teknik Elektro Universitas Brawijaya Jalan M.T Haryono
Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC
 Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC Andhyka Vireza, M. Aziz Muslim, Goegoes Dwi N. 1 Abstrak Kontroler PID akan berjalan dengan baik jika mendapatkan tuning
Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC Andhyka Vireza, M. Aziz Muslim, Goegoes Dwi N. 1 Abstrak Kontroler PID akan berjalan dengan baik jika mendapatkan tuning
Perancangan Dan Implementasi Direct Torque Control 2 Level Inverter Pada Motor Induksi
 JURNAL TEKNIK POMITS Vol., No., (202) -6 Perancangan Dan Implementasi Direct Torque Control 2 Level Inverter Pada Motor Induksi Widyanika Prastiwi, Eka Iskandar dan Rusdhianto Effendie A.K. Jurusan Teknik
JURNAL TEKNIK POMITS Vol., No., (202) -6 Perancangan Dan Implementasi Direct Torque Control 2 Level Inverter Pada Motor Induksi Widyanika Prastiwi, Eka Iskandar dan Rusdhianto Effendie A.K. Jurusan Teknik
Desain dan Implementasi Model Reference Adaptive Control untuk Pengaturan Tracking Optimal Posisi Motor DC
 Desain dan Implementasi Model Reference Adaptive Control untuk Pengaturan Tracking Optimal Posisi Motor DC Dinar Setyaningrum 22081000018 Teknik Sistem Pengaturan Institut Teknologi Sepuluh Nopember Rabu,
Desain dan Implementasi Model Reference Adaptive Control untuk Pengaturan Tracking Optimal Posisi Motor DC Dinar Setyaningrum 22081000018 Teknik Sistem Pengaturan Institut Teknologi Sepuluh Nopember Rabu,
Rancang Bangun Pengatur Tegangan Otomatis pada Generator Ac 1 Fasa Menggunakan Kendali PID (Proportional Integral Derivative)
") Rancang Bangun Pengatur Tegangan Otomatis pada Generator Ac 1 Fasa Menggunakan Kendali PID (Proportional Integral Derivative) Koko Joni* 1, Achmad Fiqhi Ibadillah 2, Achmad Faidi 3 1,2,3 Teknik Elektro,
Rancang Bangun Pengatur Tegangan Otomatis pada Generator Ac 1 Fasa Menggunakan Kendali PID (Proportional Integral Derivative) Koko Joni* 1, Achmad Fiqhi Ibadillah 2, Achmad Faidi 3 1,2,3 Teknik Elektro,
BAB III PERENCANAAN DAN PEMBUATAN. 3.1 Langkah-Langkah Dalam Merancang Motor Induksi 3 Phase. memerlukan langkah-langkah sebagai berikut :
 BAB III PERENCANAAN DAN PEMBUATAN 3.1 Langkah-Langkah Dalam Merancang Motor Induksi 3 Phase Untuk melakukan perancangan motor induksi tiga phase mini, memerlukan langkah-langkah sebagai berikut : 1. Menggambar
BAB III PERENCANAAN DAN PEMBUATAN 3.1 Langkah-Langkah Dalam Merancang Motor Induksi 3 Phase Untuk melakukan perancangan motor induksi tiga phase mini, memerlukan langkah-langkah sebagai berikut : 1. Menggambar
OPTIMISASI KONTROL PID UNTUK MOTOR DC MAGNET PERMANEN MENGGUNAKAN PARTICLE SWARM OPTIMIZATION
 OPTIMISASI KONTROL PID UNTUK MOTOR DC MAGNET PERMANEN MENGGUNAKAN PARTICLE SWARM OPTIMIZATION Muhammad Ruswandi Djalal 1, Rahmat 2 1,2 Jurusan Teknik Mesin, Program Studi Teknik Energi, Politeknik Negeri
OPTIMISASI KONTROL PID UNTUK MOTOR DC MAGNET PERMANEN MENGGUNAKAN PARTICLE SWARM OPTIMIZATION Muhammad Ruswandi Djalal 1, Rahmat 2 1,2 Jurusan Teknik Mesin, Program Studi Teknik Energi, Politeknik Negeri
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Motor DC (Direct Current) Brushless atau disebut dengan Motor BLDC (Brushless Direct Current Motor) sangat banyak digunakan dalam berbagai macam aplikasi industri saat
BAB I PENDAHULUAN 1.1 Latar Belakang Motor DC (Direct Current) Brushless atau disebut dengan Motor BLDC (Brushless Direct Current Motor) sangat banyak digunakan dalam berbagai macam aplikasi industri saat
BAB IV PENGUJIAN DAN ANALISA
 BAB IV PENGUJIAN DAN ANALISA Pengujian dan analisa sistem merupakan tahap akhir dari realisasi pengendali PID pada pendulum terbalik menggunakan mikrokontroller ATmega8 agar dapat dilinearkan disekitar
BAB IV PENGUJIAN DAN ANALISA Pengujian dan analisa sistem merupakan tahap akhir dari realisasi pengendali PID pada pendulum terbalik menggunakan mikrokontroller ATmega8 agar dapat dilinearkan disekitar
Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID
 Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID 1 Ahmad Akhyar, Pembimbing 1: Purwanto, Pembimbing 2: Erni Yudaningtyas. Abstrak Alat penyiram tanaman yang sekarang
Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID 1 Ahmad Akhyar, Pembimbing 1: Purwanto, Pembimbing 2: Erni Yudaningtyas. Abstrak Alat penyiram tanaman yang sekarang
Bambang Siswanto Pasca Sarjana Teknik Pengaturan
 Bambang Siswanto 2208202004 Pasca Sarjana Teknik Pengaturan Latar Belakang Motor DC banyak dipakai pada proses industri Penggunaan kontroler PID pada motor industri Penggunaan metode Algoritma Genetik
Bambang Siswanto 2208202004 Pasca Sarjana Teknik Pengaturan Latar Belakang Motor DC banyak dipakai pada proses industri Penggunaan kontroler PID pada motor industri Penggunaan metode Algoritma Genetik
4. BAB IV PENGUJIAN DAN ANALISIS. pengujian simulasi open loop juga digunakan untuk mengamati respon motor DC
 4. BAB IV PENGUJIAN DAN ANALISIS 4.1 Pengujian Open Loop Motor DC Pengujian simulasi open loop berfungsi untuk mengamati model motor DC apakah memiliki dinamik sama dengan motor DC yang sesungguhnya. Selain
4. BAB IV PENGUJIAN DAN ANALISIS 4.1 Pengujian Open Loop Motor DC Pengujian simulasi open loop berfungsi untuk mengamati model motor DC apakah memiliki dinamik sama dengan motor DC yang sesungguhnya. Selain
Materi Presentasi: Pendahuluan Tinjauan Pustaka Perancangan Hasil Simulasi Kesimpulan
 Judul Tugas Akhir Dosen Pembimbing : Dr. Ir. Moch. Rameli Ir. Rusdhianto Effendi A.K, M.T Perancangan dan Simulasi Direct Torque Control (DTC) pada Motor Induksi Menggunakan Teknik Space Vector Pulse Width
Judul Tugas Akhir Dosen Pembimbing : Dr. Ir. Moch. Rameli Ir. Rusdhianto Effendi A.K, M.T Perancangan dan Simulasi Direct Torque Control (DTC) pada Motor Induksi Menggunakan Teknik Space Vector Pulse Width
Simulasi Control System Design dengan Scilab dan Scicos
 Simulasi Control System Design dengan Scilab dan Scicos 1. TUJUAN PERCOBAAN Praktikan dapat menguasai pemodelan sistem, analisa sistem dan desain kontrol sistem dengan software simulasi Scilab dan Scicos.
Simulasi Control System Design dengan Scilab dan Scicos 1. TUJUAN PERCOBAAN Praktikan dapat menguasai pemodelan sistem, analisa sistem dan desain kontrol sistem dengan software simulasi Scilab dan Scicos.
BAB IV PENGUJIAN DAN EVALUASI SISTEM. dibandingkan dengan hasil running program dari penelitian yang telah dicoba
 BAB IV PENGUJIAN DAN EVALUASI SISTEM Hasil running program simulator dilakukan dalam Tugas Akhir ini akan dibandingkan dengan hasil running program dari penelitian yang telah dicoba langsung menggunakan
BAB IV PENGUJIAN DAN EVALUASI SISTEM Hasil running program simulator dilakukan dalam Tugas Akhir ini akan dibandingkan dengan hasil running program dari penelitian yang telah dicoba langsung menggunakan
SISTEM KENDALI POSISI MOTOR DC Oleh: Ahmad Riyad Firdaus Politeknik Batam
 SISTEM KENDALI POSISI MOTOR DC Oleh: Ahmad Riyad Firdaus Politeknik Batam I. Tujuan 1. Mampu melakukan analisis kinerja sistem pengaturan posisi motor arus searah.. Mampu menerangkan pengaruh kecepatan
SISTEM KENDALI POSISI MOTOR DC Oleh: Ahmad Riyad Firdaus Politeknik Batam I. Tujuan 1. Mampu melakukan analisis kinerja sistem pengaturan posisi motor arus searah.. Mampu menerangkan pengaruh kecepatan
SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID
 SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID Raditya Wiradhana, Pembimbing 1: M. Aziz Muslim, Pembimbing 2: Purwanto. 1 Abstrak Pada saat ini masih banyak tungku bakar berbahan
SISTEM PENGENDALIAN SUHU PADA TUNGKU BAKAR MENGGUNAKAN KONTROLER PID Raditya Wiradhana, Pembimbing 1: M. Aziz Muslim, Pembimbing 2: Purwanto. 1 Abstrak Pada saat ini masih banyak tungku bakar berbahan
BAB III PERANCANGAN DAN PEMBUATAN SISTEM. Gambar 3. 1 Diagram Blok Sistem Kecepatan Motor DC
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno
 1 Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno Anggara Truna Negara, Pembimbing 1: Retnowati, Pembimbing 2: Rahmadwati. Abstrak Perancangan alat fermentasi kakao otomatis
1 Perancangan Alat Fermentasi Kakao Otomatis Berbasis Mikrokontroler Arduino Uno Anggara Truna Negara, Pembimbing 1: Retnowati, Pembimbing 2: Rahmadwati. Abstrak Perancangan alat fermentasi kakao otomatis
PENENTUAN JALUR TERPENDEK PADA APLIKASI OJEK ONLINE GO-JEK DENGAN PROBABILISTIC NEURAL NETWORK (PNN) DAN PARTICLE SWARM OPTIMIZATION (PSO)
 DAN PARTICLE SWARM OPTIMIZATION (PSO)") PENENTUAN JALUR TERPENDEK PADA APLIKASI OJEK ONLINE GO-JEK DENGAN PROBABILISTIC NEURAL NETWORK (PNN) DAN PARTICLE SWARM OPTIMIZATION (PSO) Levina Fitri Rahmawati, Isnandar Slamet, dan Diari Indriati Program
PENENTUAN JALUR TERPENDEK PADA APLIKASI OJEK ONLINE GO-JEK DENGAN PROBABILISTIC NEURAL NETWORK (PNN) DAN PARTICLE SWARM OPTIMIZATION (PSO) Levina Fitri Rahmawati, Isnandar Slamet, dan Diari Indriati Program
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT)
") DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
Politeknik Elektronika Negeri Surabaya ITS Kampus ITS Sukolilo,Surabaya
 Pengaturan Kecepatan Motor Induksi 3ø dengan Kontrol PID melalui Metode Field Oriented Control (FOC) ( Rectifier, Inverter, Sensor arus dan Sensor tegangan) Denny Septa Ferdiansyah 1, Gigih Prabowo 2,
Pengaturan Kecepatan Motor Induksi 3ø dengan Kontrol PID melalui Metode Field Oriented Control (FOC) ( Rectifier, Inverter, Sensor arus dan Sensor tegangan) Denny Septa Ferdiansyah 1, Gigih Prabowo 2,
BAB III PERANCANGAN DAN PEMBUATAN SISTEM
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software maupun hardware yang digunakan untuk mendukung keseluruhan sistem
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Pada bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software maupun hardware yang digunakan untuk mendukung keseluruhan sistem
BAB 4 SIMULASI DAN ANALISA
 BAB 4 SIMULASI DAN ANALISA Bab 4 berisikan simulasi serta analisa dari hasil perancangan dan simulasi pada bab sebelumnya. Hasil perancangan dan simulasi dibagi menjadi empat sub bab dengan menggunakan
BAB 4 SIMULASI DAN ANALISA Bab 4 berisikan simulasi serta analisa dari hasil perancangan dan simulasi pada bab sebelumnya. Hasil perancangan dan simulasi dibagi menjadi empat sub bab dengan menggunakan
Kendali Perancangan Kontroler PID dengan Metode Root Locus Mencari PD Kontroler Mencari PI dan PID kontroler...
 DAFTAR ISI LEMBAR PENGESAHAN DOSEN PEMBIMBING... i LEMBAR PENGESAHAN DOSEN PENGUJI... ii HALAMAN PERSEMBAHAN... iii HALAMAN MOTTO... iv KATA PENGANTAR... v ABSTRAK... vii DAFTAR ISI... ix DAFTAR TABEL...
DAFTAR ISI LEMBAR PENGESAHAN DOSEN PEMBIMBING... i LEMBAR PENGESAHAN DOSEN PENGUJI... ii HALAMAN PERSEMBAHAN... iii HALAMAN MOTTO... iv KATA PENGANTAR... v ABSTRAK... vii DAFTAR ISI... ix DAFTAR TABEL...
BAB 4 HASIL DAN PEMBAHASAN Hasil Perancangan Perangkat Keras
 BAB 4 HASIL DAN PEMBAHASAN 4.1 Hasil Perancangan Pada bab ini akan dijelaskan mengenai hasil perancangan meliputi hasil perancangan perangkat keras dan perancangan sistem kendali. 4.1.1 Hasil Perancangan
BAB 4 HASIL DAN PEMBAHASAN 4.1 Hasil Perancangan Pada bab ini akan dijelaskan mengenai hasil perancangan meliputi hasil perancangan perangkat keras dan perancangan sistem kendali. 4.1.1 Hasil Perancangan
IMPLEMENTASI PENGATURAN POSISI CERMIN DATAR SEBAGAI HELIOSTAT MENGGUNAKAN KONTROLER PID
 IMPLEMENTASI PENGATURAN POSISI CERMIN DATAR SEBAGAI HELIOSTAT MENGGUNAKAN KONTROLER PID Disampaikan oleh Nama :Satya Permana Aryanto NRP: 2207 100 072 Pembimbing : Dr.Ir.Mochammad Rameli Pendahuluan Latar
IMPLEMENTASI PENGATURAN POSISI CERMIN DATAR SEBAGAI HELIOSTAT MENGGUNAKAN KONTROLER PID Disampaikan oleh Nama :Satya Permana Aryanto NRP: 2207 100 072 Pembimbing : Dr.Ir.Mochammad Rameli Pendahuluan Latar
Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID
 Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID Arga Rifky Nugraha, Pembimbing 1: Rahmadwati, Pembimbing 2: Retnowati. 1 Abstrak Pengontrolan kecepatan pada
Sistem Pengaturan Kecepatan Motor DC pada Alat Pengaduk Adonan Dodol Menggunakan Kontroler PID Arga Rifky Nugraha, Pembimbing 1: Rahmadwati, Pembimbing 2: Retnowati. 1 Abstrak Pengontrolan kecepatan pada
BAB I PENDAHULUAN. manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi
 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi yang semakin pesat dipicu oleh kebutuhan manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi perintah user dalam hal
BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi yang semakin pesat dipicu oleh kebutuhan manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi perintah user dalam hal
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI. III, aspek keseluruhan dimulai dari Bab I hingga Bab III, maka dapat ditarik
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dibahs mengenai pengujian control reheat desuperheater yang telah dimodelkan pada matlab sebagaimana yang telah dibahas pada bab III, aspek
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dibahs mengenai pengujian control reheat desuperheater yang telah dimodelkan pada matlab sebagaimana yang telah dibahas pada bab III, aspek
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID ADAPTIF PADA PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA
 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID ADAPTIF PADA PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA Halim Mudia 2209106079 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya-60111,
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID ADAPTIF PADA PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA Halim Mudia 2209106079 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya-60111,
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID
 UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
PENGOPTIMALAN UMPAN BALIK LINEAR QUADRATIC REGULATOR PADA LOAD FREQUENCY CONTROL MENGGUNAKAN PARTICLE SWARM OPTIMIZATION
 PENGOPTIMALAN UMPAN BALIK LINEAR QUADRATIC REGULATOR PADA LOAD FREQUENCY CONTROL MENGGUNAKAN PARTICLE SWARM OPTIMIZATION Oleh : Febriana Kristanti NRP. 1208201011 Dosen Pembimbing : 1. Dr. Erna Apriliani,
PENGOPTIMALAN UMPAN BALIK LINEAR QUADRATIC REGULATOR PADA LOAD FREQUENCY CONTROL MENGGUNAKAN PARTICLE SWARM OPTIMIZATION Oleh : Febriana Kristanti NRP. 1208201011 Dosen Pembimbing : 1. Dr. Erna Apriliani,
Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID
 1 Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID Rievqi Alghoffary, Pembimbing 1: Purwanto, Pembimbing 2: Bambang siswoyo. Abstrak Pengontrolan kecepatan pada alat
1 Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID Rievqi Alghoffary, Pembimbing 1: Purwanto, Pembimbing 2: Bambang siswoyo. Abstrak Pengontrolan kecepatan pada alat
M.FADHILLAH RIFKI ( ) Pembimbing: Dr.Ir. Bambang Sampurno, MT
 Pembimbing: Dr.Ir. Bambang Sampurno, MT") IMPLEMENTASI KONTROL PD UNTUK MENGATUR KECEPATAN MOTOR DC PADA ECVT (ELECTRIKAL CONTINUOUSLY VARIABLE TRANSMISSION) M.FADHILLAH RIFKI (2108.100.512) Pembimbing: Dr.Ir. Bambang Sampurno, MT Latar Belakang
IMPLEMENTASI KONTROL PD UNTUK MENGATUR KECEPATAN MOTOR DC PADA ECVT (ELECTRIKAL CONTINUOUSLY VARIABLE TRANSMISSION) M.FADHILLAH RIFKI (2108.100.512) Pembimbing: Dr.Ir. Bambang Sampurno, MT Latar Belakang
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER
 BERBASIS LOGIC SOLVER") PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
Kontrol Kecepatan Motor Induksi Menggunakan Metode PID-Fuzzy
 Kontrol Kecepatan Motor Induksi Menggunakan Metode PID-Fuzzy Tianur -1 #1, Dedid Cahya Happiyanto -2 #2, Agus Indra Gunawan -3 #3, Rusminto Tjatur Widodo -4 #4 # Jurusan Teknik Elektronika, Politeknik
Kontrol Kecepatan Motor Induksi Menggunakan Metode PID-Fuzzy Tianur -1 #1, Dedid Cahya Happiyanto -2 #2, Agus Indra Gunawan -3 #3, Rusminto Tjatur Widodo -4 #4 # Jurusan Teknik Elektronika, Politeknik
BAB 4 PENGUJIAN DAN ANALISA. 4.1 Pengujian Fungsi Alih Tegangan (Duty Cycle) terhadap Motor
 terhadap Motor") BAB 4 PENGUJIAN DAN ANALISA Ada beberapa percobaan yang dilakukan. 4.1 Pengujian Fungsi Alih Tegangan (Duty Cycle) terhadap Motor Pengujian ini dilakukan dengan memberikan input PWM pada motor kemudian
BAB 4 PENGUJIAN DAN ANALISA Ada beberapa percobaan yang dilakukan. 4.1 Pengujian Fungsi Alih Tegangan (Duty Cycle) terhadap Motor Pengujian ini dilakukan dengan memberikan input PWM pada motor kemudian
KENDALI KECEPATAN MOTOR DC DENGAN 4 KUADRAN. Skema konverter dc-dc 4-kuadran untuk pengendalian motor dc
 KENDALI KECEPATAN MOTOR DC DENGAN 4 KUADRAN Konverter dc-dc 4-kuadran merupakan konverter dc-dc yang dapat bekerja secara bidirectional baik arus maupun tegangan kerjanya, sehingga sangat cocok untuk aplikasi
KENDALI KECEPATAN MOTOR DC DENGAN 4 KUADRAN Konverter dc-dc 4-kuadran merupakan konverter dc-dc yang dapat bekerja secara bidirectional baik arus maupun tegangan kerjanya, sehingga sangat cocok untuk aplikasi
Swarm Optimization (Pso) untuk Tuning Pengendali Model Predictive Control (Mpc) pada Quadruple Tank
 untuk Tuning Pengendali Model Predictive Control (Mpc) pada Quadruple Tank") JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2337-3539 (2301-9271 Print) F-306 Wibowo Implementasi Metode Optimasi Particle Swarm Optimization (Pso) untuk Tuning Pengendali Model Predictive Control
JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2337-3539 (2301-9271 Print) F-306 Wibowo Implementasi Metode Optimasi Particle Swarm Optimization (Pso) untuk Tuning Pengendali Model Predictive Control
Kegiatan 2 : STARTING MOTOR ARUS SEARAH DENGAN MENGGUNAKAN TAHANAN
 Kegiatan 2 : STARTING MOTOR ARUS SEARAH DENGAN MENGGUNAKAN TAHANAN 2.1. Latar Belakang Mahasiswa perlu mengetahui aspek starting motor arus searah (Direct Current = DC) karena starting motor DC merupakan
Kegiatan 2 : STARTING MOTOR ARUS SEARAH DENGAN MENGGUNAKAN TAHANAN 2.1. Latar Belakang Mahasiswa perlu mengetahui aspek starting motor arus searah (Direct Current = DC) karena starting motor DC merupakan
RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC
 RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC Dwiana Hendrawati Prodi Teknik Konversi Energi Jurusan Teknik Mesin Politeknik Negeri Semarang Jl. Prof. H. Sudarto, SH.,
RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC Dwiana Hendrawati Prodi Teknik Konversi Energi Jurusan Teknik Mesin Politeknik Negeri Semarang Jl. Prof. H. Sudarto, SH.,
LEMBAR PENGESAHAN HALAMAN PERNYATAAN HALAMAN UCAPAN TERIMA KASIH ABSTRAK DAFTAR ISI DAFTAR TABEL DAFTAR GAMBAR DAFTAR LAMPIRAN
 DAFTAR ISI LEMBAR PENGESAHAN... i HALAMAN PERNYATAAN... ii HALAMAN UCAPAN TERIMA KASIH...iii ABSTRAK... v DAFTAR ISI... vii DAFTAR TABEL... x DAFTAR GAMBAR... xi DAFTAR LAMPIRAN... xiii BAB I PENDAHULUAN...
DAFTAR ISI LEMBAR PENGESAHAN... i HALAMAN PERNYATAAN... ii HALAMAN UCAPAN TERIMA KASIH...iii ABSTRAK... v DAFTAR ISI... vii DAFTAR TABEL... x DAFTAR GAMBAR... xi DAFTAR LAMPIRAN... xiii BAB I PENDAHULUAN...
DAFTAR ISI ABSTRAK... DAFTAR ISI...
 DAFTAR ISI Halaman KATA PENGANTAR... ABSTRAK... DAFTAR ISI... i iii iv BAB I PENDAHULUAN 1.1. Latar belakang masalah... 1 1.2. Permasalahan... 1 1.3. Batasan masalah... 2 1.4. Tujuan dan manfaat penelitian...
DAFTAR ISI Halaman KATA PENGANTAR... ABSTRAK... DAFTAR ISI... i iii iv BAB I PENDAHULUAN 1.1. Latar belakang masalah... 1 1.2. Permasalahan... 1 1.3. Batasan masalah... 2 1.4. Tujuan dan manfaat penelitian...
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Pada tahun 1950-an, banyak dijumpai motor arus searah konvensional (MASK) sebagai penggerak mekanik. Hal demikian didasarkan atas anggapan bahwa MASK memiliki kemudahan
BAB I PENDAHULUAN 1.1 Latar Belakang Pada tahun 1950-an, banyak dijumpai motor arus searah konvensional (MASK) sebagai penggerak mekanik. Hal demikian didasarkan atas anggapan bahwa MASK memiliki kemudahan
Kata Kunci: Mikrokontroler ATmega128, Inverter 3 Phase, Frekuensi. Keyword :Microcontroller Atmega128, Inverter 3 Phase, Frequency
 PENGATURAN KECEPATAN MOTOR AC TIGA PHASE UNTUK MENGATUR KECEPATAN AIR PADA IMPLEMENTASI WIRELESS SENSOR NETWORK (WSN) SEBAGAI PENDETEKSI SUMBER POLUTAN YANG POTENSIAL (PERANGKAT KERAS) M. Nur khumaidi
PENGATURAN KECEPATAN MOTOR AC TIGA PHASE UNTUK MENGATUR KECEPATAN AIR PADA IMPLEMENTASI WIRELESS SENSOR NETWORK (WSN) SEBAGAI PENDETEKSI SUMBER POLUTAN YANG POTENSIAL (PERANGKAT KERAS) M. Nur khumaidi
PERANCANGAN REMOTE TERMINAL UNIT (RTU) PADA SIMULATOR PLANT TURBIN DAN GENERATOR UNTUK PENGENDALIAN FREKUENSI MENGGUNAKAN KONTROLER PID
 PADA SIMULATOR PLANT TURBIN DAN GENERATOR UNTUK PENGENDALIAN FREKUENSI MENGGUNAKAN KONTROLER PID") Oleh: Mahsun Abdi / 2209106105 Dosen Pembimbing: 1. Dr.Ir. Mochammad Rameli 2. Ir. Rusdhianto Effendie, MT. Tugas Akhir PERANCANGAN REMOTE TERMINAL UNIT (RTU) PADA SIMULATOR PLANT TURBIN DAN GENERATOR
Oleh: Mahsun Abdi / 2209106105 Dosen Pembimbing: 1. Dr.Ir. Mochammad Rameli 2. Ir. Rusdhianto Effendie, MT. Tugas Akhir PERANCANGAN REMOTE TERMINAL UNIT (RTU) PADA SIMULATOR PLANT TURBIN DAN GENERATOR
YONI WIDHI PRIHANA DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT.
 IMPLEMENTASI SENSOR KAPASITIF PADA SISTEM PENGERING GABAH OTOMATIS YONI WIDHI PRIHANA 2210100194 DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT. LATAR BELAKANG Indonesia merupakan
IMPLEMENTASI SENSOR KAPASITIF PADA SISTEM PENGERING GABAH OTOMATIS YONI WIDHI PRIHANA 2210100194 DOSEN PEMBIMBING Dr.Muhammad Rivai, ST, MT. Ir. Siti Halimah Baki, MT. LATAR BELAKANG Indonesia merupakan
BAB I PENDAHULUAN. efesiensi, torsi, kecepatan tinggi dan dapat divariasikan, serta biaya perawatan
 BAB I PENDAHULUAN 1.1 Latar Belakang Seiring perkembangan teknologi, kebutuhan akan motor yang memiliki efesiensi, torsi, kecepatan tinggi dan dapat divariasikan, serta biaya perawatan rendah semakin meningkat.
BAB I PENDAHULUAN 1.1 Latar Belakang Seiring perkembangan teknologi, kebutuhan akan motor yang memiliki efesiensi, torsi, kecepatan tinggi dan dapat divariasikan, serta biaya perawatan rendah semakin meningkat.
Desain dan Implementasi Self Tuning LQR Adaptif untuk Pengaturan Tegangan Generator Sinkron 3 Fasa
 Desain dan Implementasi Self Tuning LQR Adaptif untuk Pengaturan Tegangan Generator Sinkron 3 Fasa Oleh : Arif Hermawan (05-176) Dosen Pembimbing : 1. Dr.Ir.Mochammad Rameli 2. Ir. Rusdhianto Effendie
Desain dan Implementasi Self Tuning LQR Adaptif untuk Pengaturan Tegangan Generator Sinkron 3 Fasa Oleh : Arif Hermawan (05-176) Dosen Pembimbing : 1. Dr.Ir.Mochammad Rameli 2. Ir. Rusdhianto Effendie
Oleh : Kikin Khoirur Roziqin Dosen Pembimbing : Prof. Dr. Ir. Mochammad Ashari, M.Eng. Ir. Sjamsjul Anam, M.T.
 Oleh : Kikin Khoirur Roziqin 2206 100 129 Dosen Pembimbing : Prof. Dr. Ir. Mochammad Ashari, M.Eng. Ir. Sjamsjul Anam, M.T. Latar Belakang Beban Non Linier Harmonisa Filter Usaha Penyelesaian Permasalahan
Oleh : Kikin Khoirur Roziqin 2206 100 129 Dosen Pembimbing : Prof. Dr. Ir. Mochammad Ashari, M.Eng. Ir. Sjamsjul Anam, M.T. Latar Belakang Beban Non Linier Harmonisa Filter Usaha Penyelesaian Permasalahan
Politeknik Elektronika Negeri Surabaya ITS Kampus ITS Sukolilo Surabaya
 Pengaturan Kecepatan Motor Induksi untuk Membuat Simulasi Gelombang Air pada Lab. Pengujian Miniatur Kapal Ir.Hendik Eko H.S, MT. 1, Suhariningsih, S.ST, MT.,Risky Ardianto 3, 1 Dosen Jurusan Teknik Elektro
Pengaturan Kecepatan Motor Induksi untuk Membuat Simulasi Gelombang Air pada Lab. Pengujian Miniatur Kapal Ir.Hendik Eko H.S, MT. 1, Suhariningsih, S.ST, MT.,Risky Ardianto 3, 1 Dosen Jurusan Teknik Elektro
PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM
 PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM Fandy Hartono 1 2203 100 067 Dr. Tri Arief Sardjono, ST. MT. 2-1970 02 12 1995 12 1001 1 Penulis, Mahasiswa S-1
PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM Fandy Hartono 1 2203 100 067 Dr. Tri Arief Sardjono, ST. MT. 2-1970 02 12 1995 12 1001 1 Penulis, Mahasiswa S-1
LAPORAN TAHUNAN PENELITIAN HIBAH BERSAING
 LAPORAN TAHUNAN PENELITIAN HIBAH BERSAING PERANCANGAN GENERATOR INDUKSI 1 FASE TEREKSITASI DIRI SEBAGAI PEMBANGKIT LISTRIK TENAGA MIKROHIDRO DI DAERAH TERPENCIL Tahun ke 1 dari rencana 2 tahun Ketua/Anggota
LAPORAN TAHUNAN PENELITIAN HIBAH BERSAING PERANCANGAN GENERATOR INDUKSI 1 FASE TEREKSITASI DIRI SEBAGAI PEMBANGKIT LISTRIK TENAGA MIKROHIDRO DI DAERAH TERPENCIL Tahun ke 1 dari rencana 2 tahun Ketua/Anggota
BAB 4 SIMULASI DAN ANALISA
 BAB 4 SIMULASI DAN ANALISA Untuk menguji hasil rancangan pengendalian motor induksi tiga fasa metode kendali torsi langsung dan duty ratio yang telah dibahas pada bab sebelumnya dilakukan simulasi dengan
BAB 4 SIMULASI DAN ANALISA Untuk menguji hasil rancangan pengendalian motor induksi tiga fasa metode kendali torsi langsung dan duty ratio yang telah dibahas pada bab sebelumnya dilakukan simulasi dengan
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN A. Metode Penelitian Metode yang digunakan oleh penyusun dalam melakukan penelitian skripsi ini antara lain: 1. Studi Pustaka, yaitu dengan cara mencari, menggali dan mengkaji
BAB III METODE PENELITIAN A. Metode Penelitian Metode yang digunakan oleh penyusun dalam melakukan penelitian skripsi ini antara lain: 1. Studi Pustaka, yaitu dengan cara mencari, menggali dan mengkaji
RANCANG BANGUN SISTEM PENGENDALIAN SUDUT PITCH TURBIN ANGIN HORIZONTAL AXIS BERBASIS PARTICLE SWARM OPTIMIZATION (PSO)
") 1 RANCANG BANGUN SISTEM PENGENDALIAN SUDUT PITCH TURBIN ANGIN HORIZONTAL AXIS BERBASIS PARTICLE SWARM OPTIMIZATION (PSO) Sunarto, Ali Musyafa Teknik Fisika, Fakultas Teknologi Industri, Institut Teknologi
1 RANCANG BANGUN SISTEM PENGENDALIAN SUDUT PITCH TURBIN ANGIN HORIZONTAL AXIS BERBASIS PARTICLE SWARM OPTIMIZATION (PSO) Sunarto, Ali Musyafa Teknik Fisika, Fakultas Teknologi Industri, Institut Teknologi
PENGENDALIAN TEKANAN PADA SISTEM HOMOGENISASI SUSU DENGAN KONTROLER PID BERBASIS ARDUINO UNO
 PENGENDALIAN TEKANAN PADA SISTEM HOMOGENISASI SUSU DENGAN KONTROLER PID BERBASIS ARDUINO UNO Garneta Rizke Ayu Cempaka, Purwanto, Rahmadwati Teknik Elektro Universitas Brawijaya Jalan M.T Haryono No.167
PENGENDALIAN TEKANAN PADA SISTEM HOMOGENISASI SUSU DENGAN KONTROLER PID BERBASIS ARDUINO UNO Garneta Rizke Ayu Cempaka, Purwanto, Rahmadwati Teknik Elektro Universitas Brawijaya Jalan M.T Haryono No.167
SISTEM PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA MENGGUNAKAN KONTROLER PID BERBASIS GENETIC ALGORITHM SKRIPSI
 SISTEM PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA MENGGUNAKAN KONTROLER PID BERBASIS GENETIC ALGORITHM SKRIPSI Diajukan Untuk Memenuhi Salah Satu Persyaratan Akademik dalam Menyelesaikan Program Sarjana
SISTEM PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA MENGGUNAKAN KONTROLER PID BERBASIS GENETIC ALGORITHM SKRIPSI Diajukan Untuk Memenuhi Salah Satu Persyaratan Akademik dalam Menyelesaikan Program Sarjana
PEMANFAATAN ENERGI MATAHARI MENGGUNAKAN SOLAR CELL SEBAGAI ENERGI ALTERNATIF UNTUK MENGGERAKKAN KONVEYOR
 PEMANFAATAN ENERGI MATAHARI MENGGUNAKAN SOLAR CELL SEBAGAI ENERGI ALTERNATIF UNTUK MENGGERAKKAN KONVEYOR M. Helmi F. A. P. 1, Epyk Sunarno 2, Endro Wahjono 2 Mahasiswa Teknik Elektro Industri 1, Dosen
PEMANFAATAN ENERGI MATAHARI MENGGUNAKAN SOLAR CELL SEBAGAI ENERGI ALTERNATIF UNTUK MENGGERAKKAN KONVEYOR M. Helmi F. A. P. 1, Epyk Sunarno 2, Endro Wahjono 2 Mahasiswa Teknik Elektro Industri 1, Dosen
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: ( Print) E-13
 ISSN: ( Print) E-13") JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) E-13 Pengaturan Kecepatan pada Simulator Parallel Hybrid Electric Vehicle (PHEV) Menggunakan Linear Quadratic Regulator (LQR)
JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) E-13 Pengaturan Kecepatan pada Simulator Parallel Hybrid Electric Vehicle (PHEV) Menggunakan Linear Quadratic Regulator (LQR)
Perancangan Sistem Pengendalian Kecepatan Motor Pompa Air Tekanan Konstan
 Perancangan Sistem Pengendalian Kecepatan Motor Pompa Air Tekanan Konstan Hari Widagdo Putra¹, Ir. Wijono, M.T., Ph.D ², Dr. Rini Nur Hasanah, S.T., M.Sc.³ ¹Mahasiswa Jurusan Teknik Elektro, ² ³Dosen Jurusan
Perancangan Sistem Pengendalian Kecepatan Motor Pompa Air Tekanan Konstan Hari Widagdo Putra¹, Ir. Wijono, M.T., Ph.D ², Dr. Rini Nur Hasanah, S.T., M.Sc.³ ¹Mahasiswa Jurusan Teknik Elektro, ² ³Dosen Jurusan
BAB 4 HASIL DAN PEMBAHASAN
 BAB 4 HASIL DAN PEMBAHASAN Setelah melalui beberapa tahap dalam pembuatan alat pengatur kecepatan motor induksi satu fasa melalui pengaturan frekuensi Menggunakan Multivibrator Astable, yaitu dimulai dari
BAB 4 HASIL DAN PEMBAHASAN Setelah melalui beberapa tahap dalam pembuatan alat pengatur kecepatan motor induksi satu fasa melalui pengaturan frekuensi Menggunakan Multivibrator Astable, yaitu dimulai dari
Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
 JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
JURNAL TEKNIK POMITS Vol. 2, No. 1, (2013) ISSN: 2337-3539 (2301-9271 Print) F-153 Rancang Bangun Sistem Kontrol Level dan Pressure Steam Generator pada Simulator Mixing Process di Workshop Instrumentasi
PERANCANGAN KONTROLER PENGGANTI ELECTRONIC CONTROL UNIT UNTUK MENGATUR POSISI SUDUT FLAP PADA MODEL MINIATUR PESAWAT N-219
 1 PERANCANGAN KONTROLER PENGGANTI ELECTRONIC CONTROL UNIT UNTUK MENGATUR POSISI SUDUT FLAP PADA MODEL MINIATUR PESAWAT N-219 Hakiki Bagus Putro W., Pembimbing 1: Ir. Purwanto.MT, Pembimbing 2: Ir. Bambang
1 PERANCANGAN KONTROLER PENGGANTI ELECTRONIC CONTROL UNIT UNTUK MENGATUR POSISI SUDUT FLAP PADA MODEL MINIATUR PESAWAT N-219 Hakiki Bagus Putro W., Pembimbing 1: Ir. Purwanto.MT, Pembimbing 2: Ir. Bambang
Kontrol PID Pada Miniatur Plant Crane
 Konferensi Nasional Sistem & Informatika 2015 STMIK STIKOM Bali, 9 10 Oktober 2015 Kontrol PID Pada Miniatur Plant Crane E. Merry Sartika 1), Hardi Sumali 2) Jurusan Teknik Elektro Universitas Kristen
Konferensi Nasional Sistem & Informatika 2015 STMIK STIKOM Bali, 9 10 Oktober 2015 Kontrol PID Pada Miniatur Plant Crane E. Merry Sartika 1), Hardi Sumali 2) Jurusan Teknik Elektro Universitas Kristen
Analisa Kestabilan Sistem dalam Penelitian ini di lakukan dengan dua Metode Yaitu:
 Analisa Kestabilan Sistem dalam Penelitian ini di lakukan dengan dua Metode Yaitu: o Analisa Stabilitas Routh Hurwith 1. Suatu metode menentukan kestabilan sistem dengan melihat pole-pole loop tertutup
Analisa Kestabilan Sistem dalam Penelitian ini di lakukan dengan dua Metode Yaitu: o Analisa Stabilitas Routh Hurwith 1. Suatu metode menentukan kestabilan sistem dengan melihat pole-pole loop tertutup
PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO. Else Orlanda Merti Wijaya.
 PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO Else Orlanda Merti Wijaya S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : [email protected]
PERANCANGAN SISTEM KESEIMBANGAN BALL AND BEAM DENGAN MENGGUNAKAN PENGENDALI PID BERBASIS ARDUINO UNO Else Orlanda Merti Wijaya S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : [email protected]
PERANCANGAN DAN IMPLEMENTASI PENGENDALI PID PADA SUBSISTEM AKTUATOR ROBOT MOBIL TIPE SINKRON
 PERANCANGAN DAN IMPLEMENTASI PENGENDALI PID PADA SUBSISTEM AKTUATOR ROBOT MOBIL TIPE SINKRON Muhammad Ilhamdi Rusydi Jurusan Teknik Elektro, Universitas Andalas Padang, Kampus Limau Manis, Padang, Sumatera
PERANCANGAN DAN IMPLEMENTASI PENGENDALI PID PADA SUBSISTEM AKTUATOR ROBOT MOBIL TIPE SINKRON Muhammad Ilhamdi Rusydi Jurusan Teknik Elektro, Universitas Andalas Padang, Kampus Limau Manis, Padang, Sumatera
Sistem Pengendali Tegangan pada Generator Induksi 3 Phasa Menggunakan Kontrol PI
 ISSN : 2598 1099 (Online) ISSN : 2502 3624 (Cetak) Sistem Pengendali Tegangan pada Generator Induksi 3 Phasa Menggunakan Kontrol PI Said Abubakar 1), Supri Hardi 2), Rizal Alfayumi 3) 1)&2), Staf Pengajar
ISSN : 2598 1099 (Online) ISSN : 2502 3624 (Cetak) Sistem Pengendali Tegangan pada Generator Induksi 3 Phasa Menggunakan Kontrol PI Said Abubakar 1), Supri Hardi 2), Rizal Alfayumi 3) 1)&2), Staf Pengajar
Rancang Bangun Inverter Multipulsa untuk Beban Penerangan Rumah Tangga Jenis Lampu Pijar
 1 Rancang Bangun Multipulsa untuk Beban Penerangan Rumah Tangga Jenis Lampu Pijar M. Zaenal Eendi ¹, Suryono ², Sudarminto S 3 1 Dosen Jurusan Teknik Elektro Industri ² Dosen Jurusan Teknik Elektro Industri
1 Rancang Bangun Multipulsa untuk Beban Penerangan Rumah Tangga Jenis Lampu Pijar M. Zaenal Eendi ¹, Suryono ², Sudarminto S 3 1 Dosen Jurusan Teknik Elektro Industri ² Dosen Jurusan Teknik Elektro Industri
SISTEM PENGENDALIAN SUHU PADA PROSES DISTILASI VAKUM BIOETANOL DENGAN MENGGUNAKAN ARDUINO
 1 SISTEM PENGENDALIAN SUHU PADA PROSES DISTILASI VAKUM BIOETANOL DENGAN MENGGUNAKAN ARDUINO Akhmad Salmi Firsyari, Pembimbing 1: Ir. Purwanto MT., Pembimbing 2: dan M Aziz Muslim ST., MT., Ph.D. Abstrak
1 SISTEM PENGENDALIAN SUHU PADA PROSES DISTILASI VAKUM BIOETANOL DENGAN MENGGUNAKAN ARDUINO Akhmad Salmi Firsyari, Pembimbing 1: Ir. Purwanto MT., Pembimbing 2: dan M Aziz Muslim ST., MT., Ph.D. Abstrak
SISTEM KONTROL KECEPATAN MOTOR DC D-6759 BERBASIS ARDUINO MEGA 2560
 1 SISTEM KONTROL KECEPATAN MOTOR DC D-6759 BERBASIS ARDUINO MEGA 2560 Muhamad Faishol Arif, Pembimbing 1: Erni Yudaningtyas, Pembimbing 2: Rahmadwati. Abstrak Hampir seluruh industri didunia saat ini memanfaatkan
1 SISTEM KONTROL KECEPATAN MOTOR DC D-6759 BERBASIS ARDUINO MEGA 2560 Muhamad Faishol Arif, Pembimbing 1: Erni Yudaningtyas, Pembimbing 2: Rahmadwati. Abstrak Hampir seluruh industri didunia saat ini memanfaatkan
Desain Penyearah 1 Fase Dengan Power Factor Mendekati Unity Dan Memiliki Thd Minimum Menggunakan Kontrol Pid-Fuzzy Pada Boost Converter
 Desain Penyearah 1 Fase Dengan Power Factor Mendekati Unity Dan Memiliki Thd Minimum Menggunakan Kontrol Pid-Fuzzy Pada Boost Converter Ainur Rofiq N 1, Irianto 2, Setyo Suka Wahyu 3 1 Dosen Jurusan Teknik
Desain Penyearah 1 Fase Dengan Power Factor Mendekati Unity Dan Memiliki Thd Minimum Menggunakan Kontrol Pid-Fuzzy Pada Boost Converter Ainur Rofiq N 1, Irianto 2, Setyo Suka Wahyu 3 1 Dosen Jurusan Teknik
Keyword: Inverter 3 fasa, PID Kontroler
 1 PENGATURAN KECEPATAN MOTOR AC TIGA FASA UNTUK MENGATUR KECEPATAN ALIRAN AIR PADA IMPLEMENTASI WIRELESS SENSOR NETWORK(WSN) SEBAGAI PENDETEKSI SUMBER POLUTAN YANG POTENSIAL (PERANGKAT LUNAK) Nur Sa adah
1 PENGATURAN KECEPATAN MOTOR AC TIGA FASA UNTUK MENGATUR KECEPATAN ALIRAN AIR PADA IMPLEMENTASI WIRELESS SENSOR NETWORK(WSN) SEBAGAI PENDETEKSI SUMBER POLUTAN YANG POTENSIAL (PERANGKAT LUNAK) Nur Sa adah
BAB 4 IMPLEMENTASI DAN EVALUASI. (secara hardware).hasil implementasi akan dievaluasi untuk mengetahui apakah
.hasil implementasi akan dievaluasi untuk mengetahui apakah") BAB 4 IMPLEMENTASI DAN EVALUASI Pelaksanaan dari perancangan telah dibuat dan dijelaskan pada Bab 3, kemudian perancangan tersebut diimplementasi ke dalam bentuk yang nyata (secara hardware).hasil implementasi
BAB 4 IMPLEMENTASI DAN EVALUASI Pelaksanaan dari perancangan telah dibuat dan dijelaskan pada Bab 3, kemudian perancangan tersebut diimplementasi ke dalam bentuk yang nyata (secara hardware).hasil implementasi
BAB III PERANCANGAN DAN PEMBUATAN ALAT Flow Chart Perancangan dan Pembuatan Alat. Mulai. Tinjauan pustaka
 59 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1. Flow Chart Perancangan dan Pembuatan Alat Mulai Tinjauan pustaka Simulasi dan perancangan alat untuk pengendali kecepatan motor DC dengan kontroler PID analog
59 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1. Flow Chart Perancangan dan Pembuatan Alat Mulai Tinjauan pustaka Simulasi dan perancangan alat untuk pengendali kecepatan motor DC dengan kontroler PID analog
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
BAB 2 LANDASAN TEORI 1.1 Metode Pengasapan Cold Smoking Ikan asap merupakan salah satu makanan khas dari Indonesia. Terdapat dua jenis pengasapan yang dapat dilakukan pada bahan makanan yaitu hot smoking
BAB III METODE PENELITIAN. Penelitian tugas akhir dilaksanakan pada bulan Februari 2014 hingga Januari
 BAB III METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian tugas akhir dilaksanakan pada bulan Februari 2014 hingga Januari 2015. Perancangan dan pengerjaan perangkat keras (hardware) dan laporan
BAB III METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian tugas akhir dilaksanakan pada bulan Februari 2014 hingga Januari 2015. Perancangan dan pengerjaan perangkat keras (hardware) dan laporan
DIRECT TORQUE CONTROL BERBASIS ADAPTIVE FUZZY LOGIC CONTROLLER SEBAGAI PENGENDALI KECEPATAN MOTOR INDUKSI TIGA FASA
 DIRECT TORQUE CONTROL BERBASIS ADAPTIVE FUZZY LOGIC CONTROLLER SEBAGAI PENGENDALI KECEPATAN MOTOR INDUKSI TIGA FASA Muhammad Syahrul Fitrah 1, Iradatu DPK 2 Jurusan Teknik Elektro Fakultas Teknik Ilmu
DIRECT TORQUE CONTROL BERBASIS ADAPTIVE FUZZY LOGIC CONTROLLER SEBAGAI PENGENDALI KECEPATAN MOTOR INDUKSI TIGA FASA Muhammad Syahrul Fitrah 1, Iradatu DPK 2 Jurusan Teknik Elektro Fakultas Teknik Ilmu
PERENCANAAN KONTROL PID PADA MOTOR INDUKSI BERBASIS MATLAB SIMULINK
 PERENCANAAN KONTROL PID PADA MOTOR INDUKSI BERBASIS MATLAB SIMULINK Andi Kurniawan N 1, Hery Hariyanto 2 1 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Semarang Jl. Sukarno-Hatta, Tlogosari, Semarang,
PERENCANAAN KONTROL PID PADA MOTOR INDUKSI BERBASIS MATLAB SIMULINK Andi Kurniawan N 1, Hery Hariyanto 2 1 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Semarang Jl. Sukarno-Hatta, Tlogosari, Semarang,
Rancang Bangun Sistem Pengendalian Level pada Knock Out Gas Drum Menggunakan Pengendali PID di Plant LNG
 Rancang Bangun Sistem Pengendalian Level pada Knock Out Gas Drum Menggunakan Pengendali PID di Plant LNG Paisal Tajun Aripin 1, Erna Kusuma Wati 1, V. Vekky R. Repi 1, Hari Hadi Santoso 1,2 1 Program Studi
Rancang Bangun Sistem Pengendalian Level pada Knock Out Gas Drum Menggunakan Pengendali PID di Plant LNG Paisal Tajun Aripin 1, Erna Kusuma Wati 1, V. Vekky R. Repi 1, Hari Hadi Santoso 1,2 1 Program Studi
SISTEM KENDALI ROKET RKX-200 LAPAN DENGAN PENGENDALI PID
 SISTEM KENDALI ROKET RKX-200 LAPAN DENGAN PENGENDALI PID Oleh: Putra Setya Bagus J. N. 1208100007 Pembimbing: Subchan, Ph.D Idris Eko Putro, M.Sc, AE JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
SISTEM KENDALI ROKET RKX-200 LAPAN DENGAN PENGENDALI PID Oleh: Putra Setya Bagus J. N. 1208100007 Pembimbing: Subchan, Ph.D Idris Eko Putro, M.Sc, AE JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
DISAIN KOMPENSATOR UNTUK PLANT MOTOR DC ORDE SATU
 DISAIN KOMPENSATOR UNTUK PLANT MOTOR DC ORDE SATU TUGAS PAPER ANALISA DISAIN SISTEM PENGATURAN Oleh: FAHMIZAL(2209 05 00) Teknik Sistem Pengaturan, Teknik Elektro ITS Surabaya Identifikasi plant Identifikasi
DISAIN KOMPENSATOR UNTUK PLANT MOTOR DC ORDE SATU TUGAS PAPER ANALISA DISAIN SISTEM PENGATURAN Oleh: FAHMIZAL(2209 05 00) Teknik Sistem Pengaturan, Teknik Elektro ITS Surabaya Identifikasi plant Identifikasi
DESAIN PENYEARAH 1 FASE DENGAN POWER FACTOR MENDEKATI UNITY DAN MEMILIKI THD MINIMUM MENGGUNAKAN KONTROL PID-fuzzy PADA BOOST CONVERTER
 DESAIN PENYEARAH 1 FASE DENGAN POWER FACTOR MENDEKATI UNITY DAN MEMILIKI THD MINIMUM MENGGUNAKAN KONTROL PID-fuzzy PADA BOOST CONVERTER Ainur Rofiq N 1, Irianto 2, Setyo Suka Wahyu 3 1 Dosen Jurusan Teknik
DESAIN PENYEARAH 1 FASE DENGAN POWER FACTOR MENDEKATI UNITY DAN MEMILIKI THD MINIMUM MENGGUNAKAN KONTROL PID-fuzzy PADA BOOST CONVERTER Ainur Rofiq N 1, Irianto 2, Setyo Suka Wahyu 3 1 Dosen Jurusan Teknik
OPTIMALISASI CRANE ANTI AYUN KONTROLER PD-LQR DENGAN ALGORITMA UPSO UNTUK MENINGKATKAN EFESIENSI PROSES BONGKAR MUAT
 OPTIMALISASI CRANE ANTI AYUN KONTROLER PD-LQR DENGAN ALGORITMA UPSO UNTUK MENINGKATKAN EFESIENSI PROSES BONGKAR MUAT Muh. Chaerur Rijal, ST, Dr. Ir. Ari Santoso, DEA 3, Ir. Rusdhianto Efendi, MT ) Jurusan
OPTIMALISASI CRANE ANTI AYUN KONTROLER PD-LQR DENGAN ALGORITMA UPSO UNTUK MENINGKATKAN EFESIENSI PROSES BONGKAR MUAT Muh. Chaerur Rijal, ST, Dr. Ir. Ari Santoso, DEA 3, Ir. Rusdhianto Efendi, MT ) Jurusan
BAB III METODE PENELITIAN
 34 BAB III METODE PENELITIAN 3.1 Tahap Proses Perancangan Alat Perancangan rangkaian daya Proteksi perangkat daya Penentuan strategi kontrol Perancangan rangkaian logika dan nilai nominal Gambar 3.1 Proses
34 BAB III METODE PENELITIAN 3.1 Tahap Proses Perancangan Alat Perancangan rangkaian daya Proteksi perangkat daya Penentuan strategi kontrol Perancangan rangkaian logika dan nilai nominal Gambar 3.1 Proses
Perancangan Sistem Kontrol PID Untuk Pengendali Sumbu Azimuth Turret Pada Turret-gun Kaliber 20mm
 A512 Perancangan Sistem Kontrol PID Untuk Pengendali Sumbu Azimuth Turret Pada Turret-gun Kaliber 20mm Danu Wisnu, Arif Wahjudi, dan Hendro Nurhadi Jurusan Teknik Mesin, Fakultas Teknik Industri, Institut
A512 Perancangan Sistem Kontrol PID Untuk Pengendali Sumbu Azimuth Turret Pada Turret-gun Kaliber 20mm Danu Wisnu, Arif Wahjudi, dan Hendro Nurhadi Jurusan Teknik Mesin, Fakultas Teknik Industri, Institut
DESAIN DAN IMPLEMENTASI INVERTER SATU FASA SEBAGAI SARANA ANTARMUKA SISTEM PHOTOVOLTAIC DENGAN JARINGAN LISTRIK BERBASIS dspic30f4012
 DESAIN DAN IMPLEMENTASI INVERTER SATU FASA SEBAGAI SARANA ANTARMUKA SISTEM PHOTOVOLTAIC DENGAN JARINGAN LISTRIK BERBASIS dspic30f4012 LAPORAN TUGAS AKHIR Oleh : JEFRI SETIAWAN 10.50.0024 PROGRAM STUDI
DESAIN DAN IMPLEMENTASI INVERTER SATU FASA SEBAGAI SARANA ANTARMUKA SISTEM PHOTOVOLTAIC DENGAN JARINGAN LISTRIK BERBASIS dspic30f4012 LAPORAN TUGAS AKHIR Oleh : JEFRI SETIAWAN 10.50.0024 PROGRAM STUDI
BAB IV ANALISA DAN PENGUJIAN ALAT
 BAB IV ANALISA DAN PENGUJIAN ALAT 4.1. Metodologi Pengujian Alat Dengan mempelajari pokok-pokok perancangan yang sudah di buat, maka diperlukan suatu pengujian terhadap perancangan ini. Pengujian dimaksudkan
BAB IV ANALISA DAN PENGUJIAN ALAT 4.1. Metodologi Pengujian Alat Dengan mempelajari pokok-pokok perancangan yang sudah di buat, maka diperlukan suatu pengujian terhadap perancangan ini. Pengujian dimaksudkan