Desain dan Realisasi Sistem Kontrol Proses Melalui Jaringan Menggunakan Distributed Control System Centum CS 3000
|
|
|
- Farida Hadiman
- 6 tahun lalu
- Tontonan:
Transkripsi


1 Desain dan Realisasi Sistem Kontrol Proses Melalui Jaringan Menggunakan Distributed Control System Centum CS 3000 D I S U S U N O L E H : F a t w a C a h y o K u s u m o DOSEN PEMBIMBING: 1. Ir. Ali Fatoni, MT. 2. Imam Arifin. ST, MT TE Tugas Tugas Akhir
2 Latar belakang Terdapat jarak yang jauh antara kontroler dan plant Penggunaan Distibuted Control System(DCS) di industri
3 Permasalahan Merancang sistem kontrol proses menggunakan Distributed Control System (DCS) Centum CS 3000 dan embeded system melalui jaringan
4 Tujuan Mengintegrasikan DCS Centum CS 3000 dengan embeded system melalui jaringan untuk mengontrol plant dari jarak jauh


5 Distibuted Control System Centum CS 3000
6 Human Inteface Station (HIS) Fungsi Pembuatan program kontroler Pengontrol jalannya proses Sebagai pengawas jalannya proses
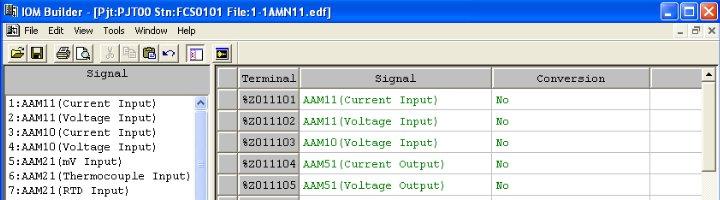
7 Field Control Station (FCS) Fungsi FCS: Mengambil input yang masuk dari transmitter Perhitungan sinyal kontrol. Mengirimkan sinyal kontrol ke aktuator. Komponen FCS : Komponen FCS : Central Processor Unit (CPU) Unit Catu Daya (Power Supply Unit, PSU) Modul masukan/keluaran (I/O modules, IOM).
 Modul Keluaran analog (5024) \Modul")
8 Advantech ADAM 5000 TCP Advantech ADAM 5000 TCP, merupakan suatu modul I/O yang digunakan sebagai akuisisi data. Modul yang digunakan Pada Advantech ADAM 5000 TCP terdiri dari : Modul masukan analog (5017) Modul Keluaran analog (5024) \Modul Masukan/Keluaran digital (5050)


9 Plant Pressure Process Rig

")
10 OLE for Process Control (OPC)
11 Identifikasi Plant
12 Perbandingan Grafik Identifikasi dengan simulasi

13 Arsitektur Simulator untuk Sistem Kontrol Proses
14 Definisi Kebutuhan Perancangan sistem kontrol proses ini membutuhkan komponen-komponen seperti : PC HIS PC Labview NI PCI E6025 Series Local Area Network(LAN) ADAM 5000 TCP Plant Pressure Process Rig
15 PC HIS Komputer Human Interface Station merupakan komputer pusat yang memiliki fungsi sebagai kontroler Komputer Human Machine Interface merupakan bagian dari Distributed Control System Centum spesifikasi : Prosessor : Intel(R) Pentium (4) 4 CPU 3.00 GHz Memori : 224Mb RAM Operating system : Microsoft Windows XP Professional Perangkat lunak : Centum CS 3000
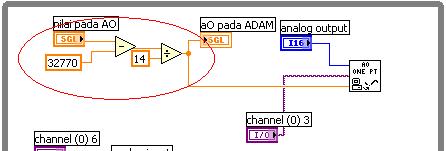
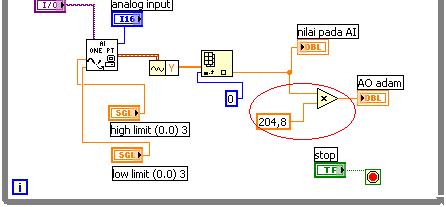
16 PC Labview Komputer Labview memiliki fungsi sebagai penghubung antara Centum CS 3000 dengan perangkat keras Advantech ADAM 5000 TCP (embeded system). Dari komputer ini, digunakan untuk pengiriman dan penerimaan data. spesifikasi: Prosessor Memori : Intel(R) Core(TM) 2 duo CPU E GHz : 988 Mb RAM Operating system : Microsoft Windows XP Professional Perangkat lunak : Labview 7.1
17 NI PCI E6025 Series PCI E6025 ini digunakan sebagai akuisisi data. Data dari modul keluaran analog FCS akan dihubungkan dengan modul masukan analog PCI dan modul masukan analog PCI akan dihubungkan dengan modul keluaran analog FCS.
18 Local Area Network (LAN) Penggunaan LAN pada perancangan sistem kontrol ini, sebagai penghubung antara PC Labview dengan perankat keras ADAM 5000 TCP
19 ADAM 5000 TCP Perangkat keras ADAM 5000 TCP ini, digunakan sebagai I/O untuk menjalankan proses. Hal ini dikarenakan, perangkat keras ADAM 5000 TCP bekerja setelah diberikan masukan dari komputer Labview 7.1. Nilai yang dibaca pada perangkat keras ADAM 5000 TCP adalah nilai desimal. Untuk menjalankan alat ini, perintah dikirim melalui jaringan ethernet dengan komunikasi modbus.
20 Plant Pressure Process Rig Plant pressure process rig digunakan sebagai representasi dari suatu proses yang terjadi di industri


21 Koneksi DCS Centum CS 3000 dengan Labview Komunikasi antara HIS dengan FCS menggunakan V-Net. Koneksi antara FCS dengan PC Labview menggunakan kabel. PCI yang digunakan NI PCI E6025Series


22 Koneksi PC Labview dengan ADAM 5000 TCP Koneksi antara PC Labview dengan ADAM 5000 TCP menggunakan jaringan Ethernet Di butuhkan perangkat lunak berupa OPC sebagai penghubung


23 Koneksi PC Labview dengan ADAM 5000 TCP (2) OPC yang digunakan adalah OPC KEPServer


24 Koneksi PC Labview dengan ADAM 5000 TCP (3)


25 Koneksi PC Labview dengan ADAM 5000 TCP (4)
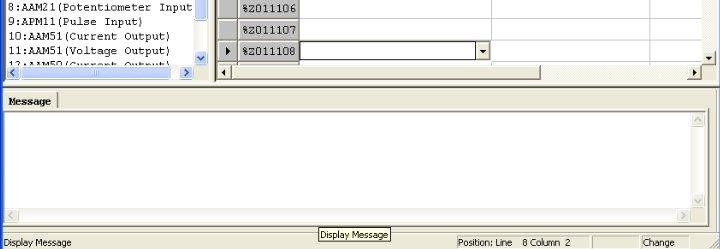
26 Perancangan Kontroler
27 Pengujian Sistem Pengujian sistem dilakukan dengan dua plant dan dua keadaan : Pengujian plant tanpa disturbance Plant virtual Plant riil Pengujian plant dengan disturbance Plant virtual Plant riil


28 Pengujian plant virtual tanpa disturbance Respon sistem dengan Kontroler PID. Setpoint= 2.5 Volt Gain proposional = 32% Gain Integral = 15% Gain Derivative = 1.3% Waktu tunda= 4 Detik Error steady state = 4.4%


29 Pengujian plant riil tanpa disturbance Respon sistem dengan Kontroler PID. Setpoint= 3 Volt Gain proposional = 92% Gain Integral = 15% Gain Derivative = 2.3% Waktu tunda= 5 Detik Error steady state = 0.1%
30 Hasil perbandingan pengujian plant tanpa disturbance Plant Τ r (detik) Τ s 5% (detik) Error Steady State(%) waktu tunda (detik) Virtual riil


31 Pengujian plant virtual dengan disturbance Respon sistem dengan Kontroler PID. Setpoint= 4 Volt Gain proposional = 7% Gain Integral = 1.4% Gain Derivative = 0.5% Waktu tunda= 3 Detik Error steady state = 6.25% Waktu kembali respon ke keadaan steady state = 2 detik


32 Pengujian plant riil dengan disturbance Respon sistem dengan Kontroler PID. Setpoint= 2.5 Volt Gain proposional = 92% Gain Integral = 15% Gain Derivative = 2.3% Waktu tunda= 5 Detik Error steady state = 0.8% Waktu kembali respon ke keadaan steady state = 4 detik
33 Hasil perbandingan pengujian plant dengan disturbance Plant Τ r (detik) Τ s 5% (detik) Error Stedy State(%) Waktu kembali (detik) Waktu Tunda (detik) Virtual riil
34 kesimpulan Pada jaringan komunikasi untuk pengiriman data dan penerimaan data melalui jaringan menggunakan protokol TCP Pada pengujian dengan menggunakan plant tanpa disturbance, waktu tunda terbesar terdapat pada penggunaan plant riil sebesar 5 detik. Pada pengujian ini, kesalahan waktu tunak terbesar terdapat pada plant virtual sebesar 4.4%. Pada pengujian dengan menggunakan plant dengan disturbance, waktu tunda terbesar terdapat pada penggunaan plant riil sebesar 5 detik. Pada percobaan ini, kesalahan waktu tunak terbesar terdapat pada plant virtual sebesar 6.25%. Ketika plant virtual atau riil diberikan gangguan dan gangguan tesebut dihilangkan, waktu kembali respon plant ke keadaan tunak tercepat pada plant virtual, yaitu 2 detik. Kesalahan waktu tunda terbesar terdapat pada penggunaan plant virtual, yaitu 6.25%.



35 Video demo
36 TERIMA KASIH
37 Additional slide
PERANCANGAN DAN REALISASI SISTEM KONTROL PROSES MENGGUNAKAN DISTRIBUTED CONTROL SYSTEM CENTUM CS 3000 MELALUI JARINGAN
 PERANCANGAN DAN REALISASI SISTEM KONTROL PROSES MENGGUNAKAN DISTRIBUTED CONTROL SYSTEM CENTUM CS 3000 MELALUI JARINGAN Fatwa Cahyo Kusumo 2206 100 137 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh
PERANCANGAN DAN REALISASI SISTEM KONTROL PROSES MENGGUNAKAN DISTRIBUTED CONTROL SYSTEM CENTUM CS 3000 MELALUI JARINGAN Fatwa Cahyo Kusumo 2206 100 137 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh
PERANCANGAN REMOTE TERMINAL UNIT (RTU) PADA SIMULATOR PLANT TURBIN DAN GENERATOR UNTUK PENGENDALIAN FREKUENSI MENGGUNAKAN KONTROLER PID
 PADA SIMULATOR PLANT TURBIN DAN GENERATOR UNTUK PENGENDALIAN FREKUENSI MENGGUNAKAN KONTROLER PID") Oleh: Mahsun Abdi / 2209106105 Dosen Pembimbing: 1. Dr.Ir. Mochammad Rameli 2. Ir. Rusdhianto Effendie, MT. Tugas Akhir PERANCANGAN REMOTE TERMINAL UNIT (RTU) PADA SIMULATOR PLANT TURBIN DAN GENERATOR
Oleh: Mahsun Abdi / 2209106105 Dosen Pembimbing: 1. Dr.Ir. Mochammad Rameli 2. Ir. Rusdhianto Effendie, MT. Tugas Akhir PERANCANGAN REMOTE TERMINAL UNIT (RTU) PADA SIMULATOR PLANT TURBIN DAN GENERATOR
Adaptive Fuzzy Untuk Menala Parameter PID pada Sistem Pengaturan Berjaringan. Nastiti Puspitosari L/O/G/O NETWORKED CONTROL SYSTEM (NCS)
") L/O/G/O NETWORKED CONTROL SYSTEM (NCS) Adaptive Fuzzy Untuk Menala Parameter PID pada Sistem Pengaturan Berjaringan Nastiti Puspitosari 2208100039 BIDANG STUDI TEKNIK SISTEM PENGATURAN - ITS TOPIK PEMBAHASAN
L/O/G/O NETWORKED CONTROL SYSTEM (NCS) Adaptive Fuzzy Untuk Menala Parameter PID pada Sistem Pengaturan Berjaringan Nastiti Puspitosari 2208100039 BIDANG STUDI TEKNIK SISTEM PENGATURAN - ITS TOPIK PEMBAHASAN
Desain dan Implementasi Kontroler PID Gain Scheduling untuk Sistem Pengaturan Proses Level pada Process Control Technology - 100
 1 Desain dan Kontroler PID Gain Scheduling untuk Sistem Pengaturan Proses Level pada Process Control Technology - 1 Rachmad Dwi Raharjo, Joko Susila, Imam Arifin Teknik Elektro, Fakultas Teknologi Industri,
1 Desain dan Kontroler PID Gain Scheduling untuk Sistem Pengaturan Proses Level pada Process Control Technology - 1 Rachmad Dwi Raharjo, Joko Susila, Imam Arifin Teknik Elektro, Fakultas Teknologi Industri,
PERANCANGAN SISTEM KENDALI BERJARINGAN MENGGUNAKAN METODE DECOUPLING DAN KONTROLER STATE FEEDBACK UNTUK SISTEM MIMO PADA BOILER PLANT SIMULATOR
 PERANCANGAN SISTEM KENDALI BERJARINGAN MENGGUNAKAN METODE DECOUPLING DAN KONTROLER STATE FEEDBACK UNTUK SISTEM MIMO PADA BOILER PLANT SIMULATOR Dian Samto Bagus Pramana, Rusdhianto Effendie A.K, Joko Susila
PERANCANGAN SISTEM KENDALI BERJARINGAN MENGGUNAKAN METODE DECOUPLING DAN KONTROLER STATE FEEDBACK UNTUK SISTEM MIMO PADA BOILER PLANT SIMULATOR Dian Samto Bagus Pramana, Rusdhianto Effendie A.K, Joko Susila
KONTROL CASCADE GENERALIZED PREDICTIVE UNTUK BOILER DRUM LEVEL BY ASTRIATONO ( )
") KONTROL CASCADE GENERALIZED PREDICTIVE UNTUK BOILER DRUM LEVEL BY ASTRIATONO (2210105028) PERMASALAHAN PERUBAHAN JUDUL Pergantian judul hanya mengubah metode kontrol yang digunakan dikarenakan plant boiler
KONTROL CASCADE GENERALIZED PREDICTIVE UNTUK BOILER DRUM LEVEL BY ASTRIATONO (2210105028) PERMASALAHAN PERUBAHAN JUDUL Pergantian judul hanya mengubah metode kontrol yang digunakan dikarenakan plant boiler
Desain dan Realisasi Virtual Plant Heat Recovery Steam Generator untuk Simulator Kontrol Proses dengan DCS CENTUM CS 3000
 Desain dan Realisasi Virtual Plant Heat Recovery Steam Generator untuk Simulator Kontrol Proses dengan DCS CENTUM CS 3000 Agus Supriyanto 2206 100 722 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh
Desain dan Realisasi Virtual Plant Heat Recovery Steam Generator untuk Simulator Kontrol Proses dengan DCS CENTUM CS 3000 Agus Supriyanto 2206 100 722 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh
Makalah Seminar Kerja Praktek
 A-1 Makalah Seminar Kerja Praktek PENGENDALIAN LEVEL AIR PADA BOILER DRUM SIMULATOR MENGGUNAKAN DCS YOKOGAWA CENTUM VP DI LABORATORIUM INSTRUMENTASI PUSDIKLAT MIGAS CEPU Ebtian Apriantoro [1], Wahyudi,
A-1 Makalah Seminar Kerja Praktek PENGENDALIAN LEVEL AIR PADA BOILER DRUM SIMULATOR MENGGUNAKAN DCS YOKOGAWA CENTUM VP DI LABORATORIUM INSTRUMENTASI PUSDIKLAT MIGAS CEPU Ebtian Apriantoro [1], Wahyudi,
LAPORAN PRAKTIKUM SISTEM KONTROL TERDISTRIBUSI
 LAPORAN PRAKTIKUM SISTEM KONTROL TERDISTRIBUSI DCS Yokogawa CS3000 Department Poly CP3 PT. Indorama Synthetics Tanggal 27-30 Oktober 2015 Disusun Oleh : Fahmi Ahmad Husaeni (201302025) Dosen Pengampu :
LAPORAN PRAKTIKUM SISTEM KONTROL TERDISTRIBUSI DCS Yokogawa CS3000 Department Poly CP3 PT. Indorama Synthetics Tanggal 27-30 Oktober 2015 Disusun Oleh : Fahmi Ahmad Husaeni (201302025) Dosen Pengampu :
SISTEM PENGATURAN BERJARINGAN : DESAIN DAN IMPLEMENTASI SLIDING MODE CONTROL PADA PRESSURE PROCESS RIG
 SISTEM PENGATURAN BERJARINGAN : DESAIN DAN IMPLEMENTASI SLIDING MODE CONTROL PADA PRESSURE PROCESS RIG 8-7 Chandra Choirulyanto 050006 Jurusan Teknik Elektro ITS, Surabaya 60, e-mail : Chandrachoirulyanto@gmailcom
SISTEM PENGATURAN BERJARINGAN : DESAIN DAN IMPLEMENTASI SLIDING MODE CONTROL PADA PRESSURE PROCESS RIG 8-7 Chandra Choirulyanto 050006 Jurusan Teknik Elektro ITS, Surabaya 60, e-mail : Chandrachoirulyanto@gmailcom
BAB 4 IMPLEMENTASI DAN EVALUASI. menerapkan Pengontrolan Dan Monitoring Ruang Kelas Dengan Menggunakan
 BAB 4 IMPLEMENTASI DAN EVALUASI Pada bab ini akan dijelaskan mengenai implementasi dan evaluasi pada saat menerapkan Pengontrolan Dan Monitoring Ruang Kelas Dengan Menggunakan Controller Board ARM2368.
BAB 4 IMPLEMENTASI DAN EVALUASI Pada bab ini akan dijelaskan mengenai implementasi dan evaluasi pada saat menerapkan Pengontrolan Dan Monitoring Ruang Kelas Dengan Menggunakan Controller Board ARM2368.
Presentasi Tugas Akhir Bidang Studi Teknik Sistem Pengaturan Jurusan Teknik Elektro - ITS
 Presentasi Tugas Akhir Bidang Studi Teknik Sistem Pengaturan Jurusan Teknik Elektro - ITS INTEGRASI PLC SIEMENS S7 Lite300DAN DCS CENTUM CS 3000 UNTUK IMPLEMENTASI PENGATURAN CONTROL VALVE Samsul Rajab
Presentasi Tugas Akhir Bidang Studi Teknik Sistem Pengaturan Jurusan Teknik Elektro - ITS INTEGRASI PLC SIEMENS S7 Lite300DAN DCS CENTUM CS 3000 UNTUK IMPLEMENTASI PENGATURAN CONTROL VALVE Samsul Rajab
MODUL KULIAH SISTEM KENDALI TERDISTRIBUSI
 MODUL KULIAH SISTEM KENDALI TERDISTRIBUSI KOMPONEN DASAR DCS Oleh : Muhamad Ali, M.T JURUSAN PENDIDIKAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA TAHUN 2012 BAB IV KOMPONEN DASAR DCS
MODUL KULIAH SISTEM KENDALI TERDISTRIBUSI KOMPONEN DASAR DCS Oleh : Muhamad Ali, M.T JURUSAN PENDIDIKAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA TAHUN 2012 BAB IV KOMPONEN DASAR DCS
BAB I PENDAHULUAN. industri menggunakan PLC (Programmable Logic Controller) sebagai sistem
 sebagai sistem") BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Saat ini kebutuhan manusia akan energi semakin berkembang seiring dengan semakin pesatnya perkembangnya teknologi, berbagai penemuan terbaru yang digunakan
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Saat ini kebutuhan manusia akan energi semakin berkembang seiring dengan semakin pesatnya perkembangnya teknologi, berbagai penemuan terbaru yang digunakan
MODUL KULIAH SISTEM KENDALI TERDISTRIBUSI
 MODUL KULIAH SISTEM KENDALI TERDISTRIBUSI KOMPONEN DASAR DCS Oleh : Muhamad Ali, M.T JURUSAN PENDIDIKAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA TAHUN 2012 BAB III KOMPONEN DASAR DCS
MODUL KULIAH SISTEM KENDALI TERDISTRIBUSI KOMPONEN DASAR DCS Oleh : Muhamad Ali, M.T JURUSAN PENDIDIKAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA TAHUN 2012 BAB III KOMPONEN DASAR DCS
Integrasi PLC S7 Lite 300 dan DCS Centum CS 3000 Untuk Sistem Kontrol Aliran Uadara Melalui Control Valve
 Integrasi PLC S7 Lite 300 dan DCS Centum CS 3000 Untuk Sistem Kontrol Aliran Uadara Melalui Control Valve Samsul Rajab - 2206100188 Jurusan Teknik Elektro - FTI, Institut Teknologi Sepuluh Nopember, Surabaya
Integrasi PLC S7 Lite 300 dan DCS Centum CS 3000 Untuk Sistem Kontrol Aliran Uadara Melalui Control Valve Samsul Rajab - 2206100188 Jurusan Teknik Elektro - FTI, Institut Teknologi Sepuluh Nopember, Surabaya
DISTRIBUTED CONTROL SYSTEM CENTUM CS3000
 Seminar Tugas Akhir PERANCANGAN SISTEM PENGENDALIAN LEVEL PADA GLYCOL CONTACTOR BERBASIS SOFTWARE DISTRIBUTED CONTROL SYSTEM CENTUM CS3000 DENGAN SELF TUNING PID PADA DEHIDRATION UNIT DI KANGEAN ENERGY
Seminar Tugas Akhir PERANCANGAN SISTEM PENGENDALIAN LEVEL PADA GLYCOL CONTACTOR BERBASIS SOFTWARE DISTRIBUTED CONTROL SYSTEM CENTUM CS3000 DENGAN SELF TUNING PID PADA DEHIDRATION UNIT DI KANGEAN ENERGY
Oleh : Dia Putranto Harmay Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc
 Oleh : Dia Putranto Harmay 2105.100.145 Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc Latar Belakang Usman Awan dkk, 2001 Merancang dan membuat dynamometer jenis prony brake dengan menggunakan strain gauge
Oleh : Dia Putranto Harmay 2105.100.145 Dosen Pembimbing : Ir. Witantyo, M.Eng. Sc Latar Belakang Usman Awan dkk, 2001 Merancang dan membuat dynamometer jenis prony brake dengan menggunakan strain gauge
KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO
 KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO Jalan MT Haryono 167 Telp & Fax. 031 55166 Malang 6515 KODE PJ-01 PENGESAHAN PUBLIKASI HASIL PENELITIAN
KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO Jalan MT Haryono 167 Telp & Fax. 031 55166 Malang 6515 KODE PJ-01 PENGESAHAN PUBLIKASI HASIL PENELITIAN
TUGAS AKHIR. Diajukan guna melengkapi sebagai syarat dalam mencapai gelar Sarjana Strata Satu (S1) Disusun Oleh :
 Disusun Oleh :") TUGAS AKHIR PERANCANGAN DAN PEMBUATAN ALAT SISTEM MONITORING PARAMETER UTAMA GENERATOR DAN BOILER DI POWER PLANT PT. DIAN SWASTATIKA SENTOSA Tbk. SERANG BERBASIS CLIENT SERVER Diajukan guna melengkapi
TUGAS AKHIR PERANCANGAN DAN PEMBUATAN ALAT SISTEM MONITORING PARAMETER UTAMA GENERATOR DAN BOILER DI POWER PLANT PT. DIAN SWASTATIKA SENTOSA Tbk. SERANG BERBASIS CLIENT SERVER Diajukan guna melengkapi
PENGENDALIAN SUHU DAN KELEMBABAN PROSES PEMATANGAN KEJU MENGGUNAKAN KONTROLER PID BERBASIS PLC. Publikasi Jurnal Skripsi
 PENGENDALIAN SUHU DAN KELEMBABAN PROSES PEMATANGAN KEJU MENGGUNAKAN KONTROLER PID BERBASIS PLC Publikasi Jurnal Skripsi Diajukan Untuk Memenuhi Sebagian Persyaratan Memperoleh Gelar Sarjana Teknik Disusun
PENGENDALIAN SUHU DAN KELEMBABAN PROSES PEMATANGAN KEJU MENGGUNAKAN KONTROLER PID BERBASIS PLC Publikasi Jurnal Skripsi Diajukan Untuk Memenuhi Sebagian Persyaratan Memperoleh Gelar Sarjana Teknik Disusun
Bab I. Pendahuluan BAB I PENDAHULUAN 1.1. LATAR BELAKANG
 1.1. LATAR BELAKANG BAB I PENDAHULUAN Kebutuhan perusahaan terhadap suatu teknologi yang mampu menangani masalah teknis operasional berskala besar dan secara otomatis mengalami peningkatan. Hal ini disebabkan
1.1. LATAR BELAKANG BAB I PENDAHULUAN Kebutuhan perusahaan terhadap suatu teknologi yang mampu menangani masalah teknis operasional berskala besar dan secara otomatis mengalami peningkatan. Hal ini disebabkan
Pertemuan ke. Tujuan pembelajaran khusus (performansi/ indikator) Pokok bahasan dan rincian materi 1 Mahasiswa dapat 1.
 Pokok bahasan dan rincian materi 1 Mahasiswa dapat 1.") Topik bahasan : Permbangan kontrol proses Tujuan pembelajaran umum : Para mahasiswa mengetahui permbangan kontrol proses di industri 1 dapat 1. permbangan menceritakan permbangan kontrol proses kontrol
Topik bahasan : Permbangan kontrol proses Tujuan pembelajaran umum : Para mahasiswa mengetahui permbangan kontrol proses di industri 1 dapat 1. permbangan menceritakan permbangan kontrol proses kontrol
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID
 UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
UJI PERFORMANSI PADA SISTEM KONTROL LEVEL AIR DENGAN VARIASI BEBAN MENGGUNAKAN KONTROLER PID Joko Prasetyo, Purwanto, Rahmadwati. Abstrak Pompa air di dunia industri sudah umum digunakan sebagai aktuator
PERANCANGAN SISTEM REMOTE UNTUK SISTEM PENGATURAN BERJARINGAN
 TUGAS AKHIR RE 1599 PERANCANGAN SISTEM REMOTE UNTUK SISTEM PENGATURAN BERJARINGAN Muhammad Yanuar H NRP 2205100137 Dosen Pembimbing Dr. Ir. Moch Rameli Imam Arifin ST, MT. JURUSAN TEKNIK ELEKTRO Fakultas
TUGAS AKHIR RE 1599 PERANCANGAN SISTEM REMOTE UNTUK SISTEM PENGATURAN BERJARINGAN Muhammad Yanuar H NRP 2205100137 Dosen Pembimbing Dr. Ir. Moch Rameli Imam Arifin ST, MT. JURUSAN TEKNIK ELEKTRO Fakultas
BAB IV ANALISIS DAN PERANCANGAN SISTEM
 BAB IV ANALISIS DAN PERANCANGAN SISTEM 4.1. Pengantar Pada bab ini akan dibahas mengenai analisis dan perancangan Aplikasi Pembelajaran Musik Klasik (APMK). Pokok bahasan yang terdapat dalam bab ini adalah
BAB IV ANALISIS DAN PERANCANGAN SISTEM 4.1. Pengantar Pada bab ini akan dibahas mengenai analisis dan perancangan Aplikasi Pembelajaran Musik Klasik (APMK). Pokok bahasan yang terdapat dalam bab ini adalah
PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC
 Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
Presentasi Tugas Akhir 5 Juli 2011 PERANCANGAN KONTROLER PI ANTI-WINDUP BERBASIS MIKROKONTROLER ATMEGA 32 PADA KONTROL KECEPATAN MOTOR DC Pembimbing: Dr.Ir. Moch. Rameli Ir. Ali Fatoni, MT Dwitama Aryana
Sedangkan untuk hasil perhitungan dengan parameter tuning PID diperoleh :
 4.2 Self Tuning PID Controller Untuk lebih memaksimalkan fungsi controller maka perlu dilakukan tuning lebih lanjut terhadap parameter PID pada controller yaitu pada nilai PB, Ti, dan Td. Seperti terlihat
4.2 Self Tuning PID Controller Untuk lebih memaksimalkan fungsi controller maka perlu dilakukan tuning lebih lanjut terhadap parameter PID pada controller yaitu pada nilai PB, Ti, dan Td. Seperti terlihat
BAB IV HASIL DAN PEMBAHASAN
 BAB IV HASIL DAN PEMBAHASAN 4.1. Tahap Pembangunan Sistem 4.1.1. Implementasi Windows Server 2012 R2 Pada tahap pertama, penulis menggunakan Windows Server 2012 R2 sebagai sistem operasi pada server utama,
BAB IV HASIL DAN PEMBAHASAN 4.1. Tahap Pembangunan Sistem 4.1.1. Implementasi Windows Server 2012 R2 Pada tahap pertama, penulis menggunakan Windows Server 2012 R2 sebagai sistem operasi pada server utama,
BAB IV IMPLEMENTASI DAN ANALISIS SISTEM
 BAB IV IMPLEMENTASI DAN ANALISIS SISTEM 4.1 Perangkat Sistem 4.1.1 Perangkat Lunak Perangkat lunak atau software yang digunakan pada keseluruhan sistem, baik yang terdapat pada sisi host maupun pada sisi
BAB IV IMPLEMENTASI DAN ANALISIS SISTEM 4.1 Perangkat Sistem 4.1.1 Perangkat Lunak Perangkat lunak atau software yang digunakan pada keseluruhan sistem, baik yang terdapat pada sisi host maupun pada sisi
QUALITY OF SERVICE PID PREDIKTIF PADA NETWORKED CONTROL SYSTEM DENGAN VARIABEL WAKTU TUNDA DAN KEGAGALAN PENGIRIMAN DATA MONDA PERDANA
 QUALITY OF SERVICE PID PREDIKTIF PADA NETWORKED CONTROL SYSTEM DENGAN VARIABEL WAKTU TUNDA DAN KEGAGALAN PENGIRIMAN DATA MONDA PERDANA 2211105052 Ujian Tugas Akhir Bidang Studi Teknik Sistem Pengaturan,
QUALITY OF SERVICE PID PREDIKTIF PADA NETWORKED CONTROL SYSTEM DENGAN VARIABEL WAKTU TUNDA DAN KEGAGALAN PENGIRIMAN DATA MONDA PERDANA 2211105052 Ujian Tugas Akhir Bidang Studi Teknik Sistem Pengaturan,
BAB V. IMPLEMENTASI DAN PENGUJIAN
 BAB V. IMPLEMENTASI DAN PENGUJIAN Bab ini merupakan tahap implementasi dari perancangan yang telah dilakukan pada bab sebelumnya dan tahap pengujian setiap komponen komponen pembangun E-dump yang terdiri
BAB V. IMPLEMENTASI DAN PENGUJIAN Bab ini merupakan tahap implementasi dari perancangan yang telah dilakukan pada bab sebelumnya dan tahap pengujian setiap komponen komponen pembangun E-dump yang terdiri
III. METODE PENELITIAN
 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian ini dilakukan di Laboratorium Teknik Kendali Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung yang dilaksanakan mulai dari bulan
III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian ini dilakukan di Laboratorium Teknik Kendali Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung yang dilaksanakan mulai dari bulan
Desain dan Implementasi Model Reference Adaptive Control untuk Pengaturan Tracking Optimal Posisi Motor DC
 Desain dan Implementasi Model Reference Adaptive Control untuk Pengaturan Tracking Optimal Posisi Motor DC Dinar Setyaningrum 22081000018 Teknik Sistem Pengaturan Institut Teknologi Sepuluh Nopember Rabu,
Desain dan Implementasi Model Reference Adaptive Control untuk Pengaturan Tracking Optimal Posisi Motor DC Dinar Setyaningrum 22081000018 Teknik Sistem Pengaturan Institut Teknologi Sepuluh Nopember Rabu,
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
PERANCANGAN DAN REALISASI BAB III PERANCANGAN DAN REALISASI
 BAB III PERANCANGAN DAN REALISASI Perancangan merupakan sebuah proses yang sangat menentukan untuk merealisasikan alat tersebut. Proses perancangan dapat dilakukan dengan cara mempelajari karakteristik
BAB III PERANCANGAN DAN REALISASI Perancangan merupakan sebuah proses yang sangat menentukan untuk merealisasikan alat tersebut. Proses perancangan dapat dilakukan dengan cara mempelajari karakteristik
BAB 3 Metode dan Perancangan 3.1 Metode Top Down
 BAB 3 Metode dan Perancangan 3.1 Metode Top Down Menurut Setiabudi (2009) untuk membangun sebuah sistem, diperlukan tahap-tahap agar pembangunan itu dapat diketahui perkembangannya serta memudahkan dalam
BAB 3 Metode dan Perancangan 3.1 Metode Top Down Menurut Setiabudi (2009) untuk membangun sebuah sistem, diperlukan tahap-tahap agar pembangunan itu dapat diketahui perkembangannya serta memudahkan dalam
Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC
 Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC Andhyka Vireza, M. Aziz Muslim, Goegoes Dwi N. 1 Abstrak Kontroler PID akan berjalan dengan baik jika mendapatkan tuning
Identifikasi Self Tuning PID Kontroler Metode Backward Rectangular Pada Motor DC Andhyka Vireza, M. Aziz Muslim, Goegoes Dwi N. 1 Abstrak Kontroler PID akan berjalan dengan baik jika mendapatkan tuning
BAB II LANDASAN TEORI. Programmable Logic Controller (PLC) diperkenalkan pertama kali pada tahun
 diperkenalkan pertama kali pada tahun") BAB II LANDASAN TEORI 2.1 Sejarah PLC Programmable Logic Controller (PLC) diperkenalkan pertama kali pada tahun 1969 oleh Richard E.Morley yang merupakan pendiri Modicon Coorporation. PLC pertama yang
BAB II LANDASAN TEORI 2.1 Sejarah PLC Programmable Logic Controller (PLC) diperkenalkan pertama kali pada tahun 1969 oleh Richard E.Morley yang merupakan pendiri Modicon Coorporation. PLC pertama yang
BAB 4 IMPLEMENTASI DAN EVALUASI
 BAB 4 IMPLEMENTASI DAN EVALUASI Pada tahap ini akan diuji hasil perancangan dengan pengukuranpengukuran serta evaluasi dari hasil pengukuran tersebut. Implementasi dan evaluasi yang dijelaskan berupa spesifikasi
BAB 4 IMPLEMENTASI DAN EVALUASI Pada tahap ini akan diuji hasil perancangan dengan pengukuranpengukuran serta evaluasi dari hasil pengukuran tersebut. Implementasi dan evaluasi yang dijelaskan berupa spesifikasi
Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID
 1 Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID Rievqi Alghoffary, Pembimbing 1: Purwanto, Pembimbing 2: Bambang siswoyo. Abstrak Pengontrolan kecepatan pada alat
1 Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID Rievqi Alghoffary, Pembimbing 1: Purwanto, Pembimbing 2: Bambang siswoyo. Abstrak Pengontrolan kecepatan pada alat
Kata kunci: Arduino Mega 2560, Pengendalian Suhu Kelembaban Relatif, Kontroler PID
 1 PENGENDALIAN SUHU KELEMBABAN RUANG EKSTRAKSI METODE MASERASI MINYAK ATSIRI MELATI KONTROLER PID BERBASIS ARDUINO MEGA Laksana Widya Peryoga¹, Ir. Retnowati, MT.², Dr. Ir. Bambang Siswoyo, MT. ³ ¹Mahasiswa
1 PENGENDALIAN SUHU KELEMBABAN RUANG EKSTRAKSI METODE MASERASI MINYAK ATSIRI MELATI KONTROLER PID BERBASIS ARDUINO MEGA Laksana Widya Peryoga¹, Ir. Retnowati, MT.², Dr. Ir. Bambang Siswoyo, MT. ³ ¹Mahasiswa
Kendali Perancangan Kontroler PID dengan Metode Root Locus Mencari PD Kontroler Mencari PI dan PID kontroler...
 DAFTAR ISI LEMBAR PENGESAHAN DOSEN PEMBIMBING... i LEMBAR PENGESAHAN DOSEN PENGUJI... ii HALAMAN PERSEMBAHAN... iii HALAMAN MOTTO... iv KATA PENGANTAR... v ABSTRAK... vii DAFTAR ISI... ix DAFTAR TABEL...
DAFTAR ISI LEMBAR PENGESAHAN DOSEN PEMBIMBING... i LEMBAR PENGESAHAN DOSEN PENGUJI... ii HALAMAN PERSEMBAHAN... iii HALAMAN MOTTO... iv KATA PENGANTAR... v ABSTRAK... vii DAFTAR ISI... ix DAFTAR TABEL...
BAB 1 Persyaratan Produk
 BAB 1 Persyaratan Produk Teknologi pengolahan citra digital sudah berkembang sangat pesat pada saat ini. Hal ini dapat dilihat dari banyaknya produk pengolahan citra digital yang ditawarkan di pasaran.
BAB 1 Persyaratan Produk Teknologi pengolahan citra digital sudah berkembang sangat pesat pada saat ini. Hal ini dapat dilihat dari banyaknya produk pengolahan citra digital yang ditawarkan di pasaran.
BAB I PENDAHULUAN. 1.1 Latar Belakang Masalah
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Pada era sekarang ini, perkembangan Teknologi Informasi sudah semakin pesat. Banyak perusahaan yang sudah memakai sistem terkomputerisasi untuk mempermudah
1 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Pada era sekarang ini, perkembangan Teknologi Informasi sudah semakin pesat. Banyak perusahaan yang sudah memakai sistem terkomputerisasi untuk mempermudah
BAB I PENDAHULUAN I.1. Gambaran Umum
 BAB I PENDAHULUAN I.1. Gambaran Umum Sebuah komputer yang berdiri sendiri atau stand alone mempunyai keterbatasan dalam banyak hal, yaitu bahwa untuk menggunakan bermacammacam perangkat tambahan, maka
BAB I PENDAHULUAN I.1. Gambaran Umum Sebuah komputer yang berdiri sendiri atau stand alone mempunyai keterbatasan dalam banyak hal, yaitu bahwa untuk menggunakan bermacammacam perangkat tambahan, maka
BAB I PENDAHULUAN. 1.1 Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah R SMA BI 1 Baleendah merupakan sekolah SMA hasil migrasi dari SMAN 1 Baleendah. Meskipun sekolah berlokasi di kabupaten, tetapi dari sisi kualitas tidak kalah
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah R SMA BI 1 Baleendah merupakan sekolah SMA hasil migrasi dari SMAN 1 Baleendah. Meskipun sekolah berlokasi di kabupaten, tetapi dari sisi kualitas tidak kalah
BAB IV PENGUJIAN DAN ANALISA SISTEM. Pengujian dilakukan dengan menghubungkan Simulator Plant dengan
 BAB IV PENGUJIAN DAN ANALISA SISTEM Pengujian dilakukan dengan menghubungkan Simulator Plant dengan menggunakan PLC FX series, 3 buah memori switch on/of sebagai input, 7 buah pilot lamp sebagai output
BAB IV PENGUJIAN DAN ANALISA SISTEM Pengujian dilakukan dengan menghubungkan Simulator Plant dengan menggunakan PLC FX series, 3 buah memori switch on/of sebagai input, 7 buah pilot lamp sebagai output
RANCANG BANGUN SISTEM KENDALI TUNGKU AUTOCLAVE ME-24
 RANCANG BANGUN SISTEM KENDALI TUNGKU AUTOCLAVE ME-24 Sugeng Rianto, Dedy Haryadi, Triarjo PTBBN-BATAN Serpong Email : sugeng-r@batan.go.id SEMINAR NASIONAL X ABSTRAK RANCANG BANGUN SISTEM KENDALI TUNGKU
RANCANG BANGUN SISTEM KENDALI TUNGKU AUTOCLAVE ME-24 Sugeng Rianto, Dedy Haryadi, Triarjo PTBBN-BATAN Serpong Email : sugeng-r@batan.go.id SEMINAR NASIONAL X ABSTRAK RANCANG BANGUN SISTEM KENDALI TUNGKU
SNIFFING PASSWORD MENGGUNAKAN APLIKASI CAIN AND ABEL PADA JARINGAN LOCAL AREA NETWORK. Disusun Oleh : Very Dwi Primajaya Teknik Informatika
 SNIFFING PASSWORD MENGGUNAKAN APLIKASI CAIN AND ABEL PADA JARINGAN LOCAL AREA NETWORK Disusun Oleh : Very Dwi Primajaya 58411862 Teknik Informatika Abstraksi Very Dwi Primajaya, 58411862 Sniffing Password
SNIFFING PASSWORD MENGGUNAKAN APLIKASI CAIN AND ABEL PADA JARINGAN LOCAL AREA NETWORK Disusun Oleh : Very Dwi Primajaya 58411862 Teknik Informatika Abstraksi Very Dwi Primajaya, 58411862 Sniffing Password
DISTRIBUTED CONTROL SYSTEM (DCS)
") Nama : Emha Rofiqi Hasyim NIM : 09501241034 DISTRIBUTED CONTROL SYSTEM (DCS) A. Pemahaman Dasar & Sejarah Perkembangan DCS DCS (Distributed Control System) adalah suatu pengembangan sistem kontrol dengan
Nama : Emha Rofiqi Hasyim NIM : 09501241034 DISTRIBUTED CONTROL SYSTEM (DCS) A. Pemahaman Dasar & Sejarah Perkembangan DCS DCS (Distributed Control System) adalah suatu pengembangan sistem kontrol dengan
Pertemuan ke-2. Pengantar PLC
 Pertemuan ke-2 Pengantar PLC Mengetahui sejarah perkembangan PLC Mengetahui pengontrolan dengan Relay Prinsip dasar operasi PLC Mengetahui informasi umum mengenai PLC Sasaran Pelatihan Sejarah Singkat
Pertemuan ke-2 Pengantar PLC Mengetahui sejarah perkembangan PLC Mengetahui pengontrolan dengan Relay Prinsip dasar operasi PLC Mengetahui informasi umum mengenai PLC Sasaran Pelatihan Sejarah Singkat
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 5 (2), 2013 ISSN :
 Vol 5 (2), 2013 ISSN :") Abstrak Pembuatan Operator Training Simulator Unit Smelter pada Pabrik Pemurnian Tembaga Menggunakan Fasilitas Pemrograman Function Block Distributed Control System Widya Prapti Pratiwi, Estiyanti Ekawati
Abstrak Pembuatan Operator Training Simulator Unit Smelter pada Pabrik Pemurnian Tembaga Menggunakan Fasilitas Pemrograman Function Block Distributed Control System Widya Prapti Pratiwi, Estiyanti Ekawati
FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC
 FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC Afriadi Rahman #1, Agus Indra G, ST, M.Sc, #2, Dr. Rusminto Tjatur W, ST, #3, Legowo S, S.ST, M.Sc #4 # Jurusan Teknik
FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC Afriadi Rahman #1, Agus Indra G, ST, M.Sc, #2, Dr. Rusminto Tjatur W, ST, #3, Legowo S, S.ST, M.Sc #4 # Jurusan Teknik
Bab I : Persyaratan Produk
 Bab I : Persyaratan Produk 1.1. Pendahuluan Penggunaan PDA sudah makin sering dijumpai di lapisan masyarakat, khususnya bagi mereka yang banyak berhubungan dengan dunia bisnis dan teknologi. PDA dapat
Bab I : Persyaratan Produk 1.1. Pendahuluan Penggunaan PDA sudah makin sering dijumpai di lapisan masyarakat, khususnya bagi mereka yang banyak berhubungan dengan dunia bisnis dan teknologi. PDA dapat
Hardware Description DCS Centum VP
 Hardware Description DCS Centum VP Training Services Center - SVD Prepared by: Nico Nyoto Raharjo PT. Yokogawa Indonesia Wisma Aldiron Dirgantara 2 nd floor, suite 22-29 Jl. Jend. Gatot Subroto Kav.72
Hardware Description DCS Centum VP Training Services Center - SVD Prepared by: Nico Nyoto Raharjo PT. Yokogawa Indonesia Wisma Aldiron Dirgantara 2 nd floor, suite 22-29 Jl. Jend. Gatot Subroto Kav.72
BAB IV PERANCANGAN DAN IMPLEMENTASI
 BAB IV PERANCANGAN DAN IMPLEMENTASI 4.1. Perancangan Pada tahap perancangan akan dilakukan perancangan router yang akan digunakan, topology network, konfigurasi ip address, routing protocol, server, client,
BAB IV PERANCANGAN DAN IMPLEMENTASI 4.1. Perancangan Pada tahap perancangan akan dilakukan perancangan router yang akan digunakan, topology network, konfigurasi ip address, routing protocol, server, client,
ELKAHFI 200 TELEMETRY SYSTEM
 ELKAHFI 200 TELEMETRY SYSTEM User Manual Edisi September 2006 ELKAHFI Design & Embedded System Solution Daftar Isi Pengenalan Elkahfi Telemetry System Pendahuluan 1 Kelengkapan Telemetry System 2 Spesifikasi
ELKAHFI 200 TELEMETRY SYSTEM User Manual Edisi September 2006 ELKAHFI Design & Embedded System Solution Daftar Isi Pengenalan Elkahfi Telemetry System Pendahuluan 1 Kelengkapan Telemetry System 2 Spesifikasi
BAB IV HASIL DAN PEMBAHASAN
 BAB IV HASIL DAN PEMBAHASAN IV.1 Kebutuhan Sistem Hardware & Software Agar sistem dapat berjalan dengan baik dibutuh kan computer dengan spesifikasi yang mencakup fasilitas multimedia yaitu minimal mencakup
BAB IV HASIL DAN PEMBAHASAN IV.1 Kebutuhan Sistem Hardware & Software Agar sistem dapat berjalan dengan baik dibutuh kan computer dengan spesifikasi yang mencakup fasilitas multimedia yaitu minimal mencakup
Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]
![Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]](/thumbs/75/72135311.jpg "Tabel 1. Parameter yang digunakan pada proses Heat Exchanger [1]") 1 feedback, terutama dalam kecepatan tanggapan menuju keadaan stabilnya. Hal ini disebabkan pengendalian dengan feedforward membutuhkan beban komputasi yang relatif lebih kecil dibanding pengendalian dengan
1 feedback, terutama dalam kecepatan tanggapan menuju keadaan stabilnya. Hal ini disebabkan pengendalian dengan feedforward membutuhkan beban komputasi yang relatif lebih kecil dibanding pengendalian dengan
IDENTIFIKASI DAN DESAIN CONTROLLER PADA TRAINER FEEDBACK PRESSURE PROCESS RIG Satryo Budi Utomo, Universitas Jember
 IDENTIFIKASI DAN DESAIN CONTROLLER PADA TRAINER FEEDBACK PRESSURE PROCESS RIG 38 714 Abstrac Satryo Budi Utomo, Universitas Jember Satryo.budiutomo@yahoo.com Pressure Process Control of Trainer studying
IDENTIFIKASI DAN DESAIN CONTROLLER PADA TRAINER FEEDBACK PRESSURE PROCESS RIG 38 714 Abstrac Satryo Budi Utomo, Universitas Jember Satryo.budiutomo@yahoo.com Pressure Process Control of Trainer studying
Kampus PENS-ITS Sukolilo, Surabaya
 1. JUDUL PROYEK AKHIR Rancang Bangun Sistem Monitoring dan Kontrol Kecepatan Motor DC Secara Nirkabel Untuk Jarak Jauh. 2. ABSTRAK Untuk menunjang teori yang telah dipelajari, praktikum menjadi suatu bagian
1. JUDUL PROYEK AKHIR Rancang Bangun Sistem Monitoring dan Kontrol Kecepatan Motor DC Secara Nirkabel Untuk Jarak Jauh. 2. ABSTRAK Untuk menunjang teori yang telah dipelajari, praktikum menjadi suatu bagian
BAB III LANDASAN TEORI
 BAB III LANDASAN TEORI 3.1 Kontrol Proses Proses adalah suatu rangkaian aksi yang saling berkaitan dan memiliki fungsi untuk melakukan transformasi materi. Yang mencakup semua sumber daya yang terlibat
BAB III LANDASAN TEORI 3.1 Kontrol Proses Proses adalah suatu rangkaian aksi yang saling berkaitan dan memiliki fungsi untuk melakukan transformasi materi. Yang mencakup semua sumber daya yang terlibat
Perancangan dan Implementasi Kontroler PID untuk Pengaturan Waktu Injeksi dan Waktu Pengapian Saat Kecepatan Stasioner pada Spark Ignition Engine
 Perancangan dan Implementasi Kontroler PID untuk Pengaturan Waktu dan Waktu Pengapian Saat Kecepatan Stasioner pada Spark Ignition Engine M. Luqman Hakim 1) Ari Santoso 2) Joko Susila 3) 1) Jurusan Teknik
Perancangan dan Implementasi Kontroler PID untuk Pengaturan Waktu dan Waktu Pengapian Saat Kecepatan Stasioner pada Spark Ignition Engine M. Luqman Hakim 1) Ari Santoso 2) Joko Susila 3) 1) Jurusan Teknik
METODE PENELITIAN Prototipe [Pressman 1997] Analisis Kebutuhan
![METODE PENELITIAN Prototipe [Pressman 1997] Analisis Kebutuhan](/thumbs/55/37277154.jpg "METODE PENELITIAN Prototipe [Pressman 1997] Analisis Kebutuhan") 6 Prototipe cukup efektif untuk memperoleh kebutuhan dan aturan yang jelas yang disetujui pelanggan dan pembuat perangkat lunak. Walaupun pada umumnya prototipe akan dihilangkan dan dibuat perangkat lunak
6 Prototipe cukup efektif untuk memperoleh kebutuhan dan aturan yang jelas yang disetujui pelanggan dan pembuat perangkat lunak. Walaupun pada umumnya prototipe akan dihilangkan dan dibuat perangkat lunak
Pengantar Organisasi Komputer
 BAB 1 Pengantar Organisasi Komputer Buku ini membahas tentang struktur dan fungsi komputer. Setelah mempelajari buku ini diharapkan dapat memahami sifat dan karakteristik sistem-sistem komputer yang berkembang
BAB 1 Pengantar Organisasi Komputer Buku ini membahas tentang struktur dan fungsi komputer. Setelah mempelajari buku ini diharapkan dapat memahami sifat dan karakteristik sistem-sistem komputer yang berkembang
BAB IV IMPLEMENTASI DAN PENGUJIAN
 BAB IV IMPLEMENTASI DAN PENGUJIAN Pada bab ini akan dijelaskan mengenai perancangan aplikasi Traffic Light Control System berbasis jaringan dan pengawasan traffic dengan kamera berdasarkan jam kantor sampai
BAB IV IMPLEMENTASI DAN PENGUJIAN Pada bab ini akan dijelaskan mengenai perancangan aplikasi Traffic Light Control System berbasis jaringan dan pengawasan traffic dengan kamera berdasarkan jam kantor sampai
PENDAHULUAN. Dalam otomasi industri ini dibutuhkan adanya sistem pengawasan kendali untuk. serta manajemen informasi yang cepat dan akurat.
 PENDAHULUAN 1.1 Latar Belakang Masalah Dalam dunia industri saat ini, teknologi yang digunakan sudah beralih dari yang sebelumnya manual dan membutuhkan banyak tenaga kerja menjadi serba otomatis. Otomasi
PENDAHULUAN 1.1 Latar Belakang Masalah Dalam dunia industri saat ini, teknologi yang digunakan sudah beralih dari yang sebelumnya manual dan membutuhkan banyak tenaga kerja menjadi serba otomatis. Otomasi
BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM. jaringan. Topologi jaringan terdiri dari 3 client, 1 server, dan 2 router yang
 BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM 3.1 Metode Penelitian Dalam sistem perancangan ini awal mula dibuat perancangan topologi jaringan. Topologi jaringan terdiri dari 3 client, 1 server, dan
BAB III METODE PENELITIAN DAN PERANCANGAN SISTEM 3.1 Metode Penelitian Dalam sistem perancangan ini awal mula dibuat perancangan topologi jaringan. Topologi jaringan terdiri dari 3 client, 1 server, dan
PROPOSAL SKRIPSI LOAD BALANCING DENGAN 2 MODEM GSM
 PROPOSAL SKRIPSI LOAD BALANCING DENGAN 2 MODEM GSM IMPLEMENTASI LOAD BALANCING DENGAN 2 MODEM GSM MENGGUNAKAN VYATTA ROUTER OS Seiring dengan jumlah data yang harus direkam setiap tahun, dibutuhkan pula
PROPOSAL SKRIPSI LOAD BALANCING DENGAN 2 MODEM GSM IMPLEMENTASI LOAD BALANCING DENGAN 2 MODEM GSM MENGGUNAKAN VYATTA ROUTER OS Seiring dengan jumlah data yang harus direkam setiap tahun, dibutuhkan pula
BAB III FUNGSI BAGIAN PLC. Processor. Catu Daya. Gambar 2. Block Diagram Perangkat Keras PLC
 BAB III FUNGSI BAGIAN PLC Programming Devices Processor Modul Input Modul Output Catu Daya Gambar 2. Block Diagram Perangkat Keras PLC Dari gambar diatas, bagian bagian tersebut mempunyai fungsi yang saling
BAB III FUNGSI BAGIAN PLC Programming Devices Processor Modul Input Modul Output Catu Daya Gambar 2. Block Diagram Perangkat Keras PLC Dari gambar diatas, bagian bagian tersebut mempunyai fungsi yang saling
ANALISA PENGARUH LAJU ALIRAN, TEKANAN, AIR DAN DEBU TERHADAP PENGUKURAN SPECIFIC GRAVITY GAS PROSES PRODUKSI DI AREA DIRECT REDUCTION PLANT
 LAPORAN TUGAS AKHIR ANALISA PENGARUH LAJU ALIRAN, TEKANAN, AIR DAN DEBU TERHADAP PENGUKURAN SPECIFIC GRAVITY GAS PROSES PRODUKSI DI AREA DIRECT REDUCTION PLANT Diajukan guna melengkapi sebagai syarat dalam
LAPORAN TUGAS AKHIR ANALISA PENGARUH LAJU ALIRAN, TEKANAN, AIR DAN DEBU TERHADAP PENGUKURAN SPECIFIC GRAVITY GAS PROSES PRODUKSI DI AREA DIRECT REDUCTION PLANT Diajukan guna melengkapi sebagai syarat dalam
DAFTAR ISI HALAMAN PENGESAHAN... ABSTRAKSI... KATA PENGANTAR... DAFTAR ISI... DAFTAR TABEL... DAFTAR GAMBAR... DAFTAR LAMPIRAN...
 DAFTAR ISI HALAMAN PENGESAHAN... ABSTRAKSI... KATA PENGANTAR... DAFTAR ISI... DAFTAR TABEL... DAFTAR GAMBAR... Halaman DAFTAR LAMPIRAN... xviii DAFTAR ISTILAH DAN SINGKATAN... BAB I PENDAHULUAN 1.1 Latar
DAFTAR ISI HALAMAN PENGESAHAN... ABSTRAKSI... KATA PENGANTAR... DAFTAR ISI... DAFTAR TABEL... DAFTAR GAMBAR... Halaman DAFTAR LAMPIRAN... xviii DAFTAR ISTILAH DAN SINGKATAN... BAB I PENDAHULUAN 1.1 Latar
ABSTRAK. Universitas Kristen Maranatha
 ABSTRAK Pengendalian telah memainkan peranan penting dalam perkembangan kerekayasaan dan ilmu karena telah menjadi bagian penting dan kesatuan dari proses industri dan fabrikasi modern yang bertujuan untuk
ABSTRAK Pengendalian telah memainkan peranan penting dalam perkembangan kerekayasaan dan ilmu karena telah menjadi bagian penting dan kesatuan dari proses industri dan fabrikasi modern yang bertujuan untuk
LAPORAN PENELITIAN APLIKASI DCS HONEYWELL CONTROL ROOM PADA PRESSURE PLANT. Nama Tim :
 LAPORAN PENELITIAN APLIKASI DCS HONEYWELL CONTROL ROOM PADA PRESSURE PLANT Nama Tim : Nurpadmi (19790514 201012 2001) Wasis Waskito Adi (19830316 201012 1001) Agus Sugiharto (19800516 200604 1001) Luita
LAPORAN PENELITIAN APLIKASI DCS HONEYWELL CONTROL ROOM PADA PRESSURE PLANT Nama Tim : Nurpadmi (19790514 201012 2001) Wasis Waskito Adi (19830316 201012 1001) Agus Sugiharto (19800516 200604 1001) Luita
Sistem PID Pengendali Level Ketinggian Air Berbasis Modbus/TCP - LCU dan Industrial Field Control Node - RTU
 Sistem PID Pengendali Level Ketinggian Air Berbasis Modbus/TCP - LCU dan Industrial Field Control Node - RTU Sando Andre Simanullang 1, Paula Santi Rudati 2, Feriyonika 3 1 Jurusan Teknik Elektro, Politeknik
Sistem PID Pengendali Level Ketinggian Air Berbasis Modbus/TCP - LCU dan Industrial Field Control Node - RTU Sando Andre Simanullang 1, Paula Santi Rudati 2, Feriyonika 3 1 Jurusan Teknik Elektro, Politeknik
BAB 1 PENDAHULUAN. 1.1 Pengantar
 BAB 1 PENDAHULUAN 1.1 Pengantar Perkembangan teknologi informasi khususnya jaringan Internet telah membawa perubahan dalam tingkah laku sosial masyarakat dalam berinteraksi. Masyarakat sudah mengenal Internet
BAB 1 PENDAHULUAN 1.1 Pengantar Perkembangan teknologi informasi khususnya jaringan Internet telah membawa perubahan dalam tingkah laku sosial masyarakat dalam berinteraksi. Masyarakat sudah mengenal Internet
BAB 4 IMPLEMENTASI DAN EVALUASI. Penerapan sistem streaming MIDI pada jaringan memerlukan komponen
 BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Spesifikasi Sistem Penerapan sistem streaming MIDI pada jaringan memerlukan komponen komponen berupa perangkat keras dan piranti lunak. Dari survei yang diperoleh pada
BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Spesifikasi Sistem Penerapan sistem streaming MIDI pada jaringan memerlukan komponen komponen berupa perangkat keras dan piranti lunak. Dari survei yang diperoleh pada
SIMULASI DATA ACQUISITION ALAT UJI FLIGHT CONTROL ACTUATOR PESAWAT MENGGUNAKAN SOFTWARE LABVIEW
 SIMULASI DATA ACQUISITION ALAT UJI FLIGHT CONTROL ACTUATOR PESAWAT DATA ACQUISITION SIMULATION OF TEST EQUIPMENT AIRCRAFT FLIGHT CONTROL ACTUATOR USING LABVIEW SOFTWARE Decy Nataliana 1, Usep Ali Albayumi
SIMULASI DATA ACQUISITION ALAT UJI FLIGHT CONTROL ACTUATOR PESAWAT DATA ACQUISITION SIMULATION OF TEST EQUIPMENT AIRCRAFT FLIGHT CONTROL ACTUATOR USING LABVIEW SOFTWARE Decy Nataliana 1, Usep Ali Albayumi
SISTEM PENGENDALI DAN PENGAWAS PENGGUNAAN LISTRIK PADA GEDUNG BERTINGKAT BERBASIS WEB
 SISTEM PENGENDALI DAN PENGAWAS PENGGUNAAN LISTRIK PADA GEDUNG BERTINGKAT BERBASIS WEB Oleh : Eko Junaidi Salam 2208 030 006 Hari Purnawiyanto 2208 030 086 D3 Teknik Elektro Institut Teknologi Sepuluh Nopember
SISTEM PENGENDALI DAN PENGAWAS PENGGUNAAN LISTRIK PADA GEDUNG BERTINGKAT BERBASIS WEB Oleh : Eko Junaidi Salam 2208 030 006 Hari Purnawiyanto 2208 030 086 D3 Teknik Elektro Institut Teknologi Sepuluh Nopember
BAB IV UJI COBA KABEL USB NETWORK BRIDGE
 BAB IV UJI COBA KABEL USB NETWORK BRIDGE 4.1 Uji Coba Koneksi Jaringan Dalam uji coba koneksi jaringan antara dua komputer ini, penulis membandingkan koneksi jaringan menggunakan kabel USB Network/Bridge
BAB IV UJI COBA KABEL USB NETWORK BRIDGE 4.1 Uji Coba Koneksi Jaringan Dalam uji coba koneksi jaringan antara dua komputer ini, penulis membandingkan koneksi jaringan menggunakan kabel USB Network/Bridge
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari trainer kendali kecepatan motor DC menggunakan kendali PID dan
Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID
 Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID 1 Ahmad Akhyar, Pembimbing 1: Purwanto, Pembimbing 2: Erni Yudaningtyas. Abstrak Alat penyiram tanaman yang sekarang
Sistem Pengaturan Kecepatan Motor DC Pada Alat Penyiram Tanaman Menggunakan Kontoler PID 1 Ahmad Akhyar, Pembimbing 1: Purwanto, Pembimbing 2: Erni Yudaningtyas. Abstrak Alat penyiram tanaman yang sekarang
PERANGKAT KERAS YANG DIGUNAKAN UNTUK AKSES INTERNET
 PERANGKAT KERAS YANG DIGUNAKAN UNTUK AKSES INTERNET Perkembangan Internet Pd awalnya jaringan komputer dilakukan pd jaringan yg sangat terbatas Menggunakan 2 buah komputer. Kemudian jaringan tersebut berkembang
PERANGKAT KERAS YANG DIGUNAKAN UNTUK AKSES INTERNET Perkembangan Internet Pd awalnya jaringan komputer dilakukan pd jaringan yg sangat terbatas Menggunakan 2 buah komputer. Kemudian jaringan tersebut berkembang
Sistem Redundant PLC (Studi Kasus Aplikasi Pengontrolan Plant Temperatur Air)
") Sistem Redundant PLC (Studi Kasus Aplikasi Pengontrolan Plant Temperatur Air) R. Ira Yustina (0522027) Jurusan Teknik Elektro, Fakultas Teknik,, Jl. Prof.Drg.Suria Sumantri, MPH no.65, Bandung 40164, Indonesia.
Sistem Redundant PLC (Studi Kasus Aplikasi Pengontrolan Plant Temperatur Air) R. Ira Yustina (0522027) Jurusan Teknik Elektro, Fakultas Teknik,, Jl. Prof.Drg.Suria Sumantri, MPH no.65, Bandung 40164, Indonesia.
BAB IV PENGUJIAN DAN ANALISIS
 BAB IV PENGUJIAN DAN ANALISIS Pada bab ini akan dibahas mengenai pengujian alat serta analisis dari hasil pengujian. Tujuan dari pengujian ini untuk mengetahui sejauh mana kinerja hasil perancangan yang
BAB IV PENGUJIAN DAN ANALISIS Pada bab ini akan dibahas mengenai pengujian alat serta analisis dari hasil pengujian. Tujuan dari pengujian ini untuk mengetahui sejauh mana kinerja hasil perancangan yang
BAB 3. PERANCANGAN JARINGAN DAN PENGUJIAN
 BAB 3. PERANCANGAN JARINGAN DAN PENGUJIAN 3.1 Topologi Jaringan Topologi jaringan yang digunakan untuk pengujian routing protokol RIPng dan OSPFv3 Menggunakan bentuk topologi ring dengan 3 buah router
BAB 3. PERANCANGAN JARINGAN DAN PENGUJIAN 3.1 Topologi Jaringan Topologi jaringan yang digunakan untuk pengujian routing protokol RIPng dan OSPFv3 Menggunakan bentuk topologi ring dengan 3 buah router
BAB III METODOLOGI PENELITIAN. pemrograman. Pemrogramannya akan di deskripsikan berupa flowchart yang akan
 BAB III METODOLOGI PENELITIAN 3.1 Perancangan Alat Pada BAB pembuatan alat ini akan dibahas perencanaan dan realisasi pemrograman. Pemrogramannya akan di deskripsikan berupa flowchart yang akan dibuat.
BAB III METODOLOGI PENELITIAN 3.1 Perancangan Alat Pada BAB pembuatan alat ini akan dibahas perencanaan dan realisasi pemrograman. Pemrogramannya akan di deskripsikan berupa flowchart yang akan dibuat.
PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN
 PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN Nazrul Effendy 1), Masrul Solichin 2), Teuku Lukman Nur Hakim 3), Faisal Budiman 4) Jurusan Teknik Fisika, Fakultas
PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN Nazrul Effendy 1), Masrul Solichin 2), Teuku Lukman Nur Hakim 3), Faisal Budiman 4) Jurusan Teknik Fisika, Fakultas
BAB III. ANALISIS DAN PERANCANGAN SISTEM
 BAB III. ANALISIS DAN PERANCANGAN SISTEM 3.1. Identifikasi Masalah Peranan teknologi sensor nirkabel dapat diterapkan dalam kehidupan manusia untuk membantu mendapatkan informasi secara cepat dan akurat.
BAB III. ANALISIS DAN PERANCANGAN SISTEM 3.1. Identifikasi Masalah Peranan teknologi sensor nirkabel dapat diterapkan dalam kehidupan manusia untuk membantu mendapatkan informasi secara cepat dan akurat.
Pertemuan ke-14 Pengontrolan l var iabel ll l ana og menggunakan PLC: Algoritma PID
 Pertemuan ke-14 Pengontrolan variabel analog menggunakan PLC: Algoritma PID Garis Besar & Tujuan Sesi Memahami apa itu kontrol PID Mengetahui fungsi dari setiap istilah kontrol PID Bisa memilih kombinasi
Pertemuan ke-14 Pengontrolan variabel analog menggunakan PLC: Algoritma PID Garis Besar & Tujuan Sesi Memahami apa itu kontrol PID Mengetahui fungsi dari setiap istilah kontrol PID Bisa memilih kombinasi
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Dalam dunia industri, dituntut suatu teknologi yang mampu menghasilkan peralatan yang dapat menyelesaikan segala permasalahan industri dan mempermudah manusia dalam
BAB I PENDAHULUAN 1.1 Latar Belakang Dalam dunia industri, dituntut suatu teknologi yang mampu menghasilkan peralatan yang dapat menyelesaikan segala permasalahan industri dan mempermudah manusia dalam
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID ADAPTIF PADA PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA
 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID ADAPTIF PADA PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA Halim Mudia 2209106079 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya-60111,
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID ADAPTIF PADA PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA Halim Mudia 2209106079 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya-60111,
PRAKATA. Puji syukur atas rahmat dan kehadirat Allah SWT sehingga penulis dapat
 PRAKATA Assalamu alaikum Wr. Wb. Puji syukur atas rahmat dan kehadirat Allah SWT sehingga penulis dapat menyelesaikan skripsi berjudul Analisis Virtualisasi Aplikasi dengan RemoteApp Guna Optimalisasi
PRAKATA Assalamu alaikum Wr. Wb. Puji syukur atas rahmat dan kehadirat Allah SWT sehingga penulis dapat menyelesaikan skripsi berjudul Analisis Virtualisasi Aplikasi dengan RemoteApp Guna Optimalisasi
PINTU PEMBERITAHU KEGIATAN RUANGAN MENGGUNAKAN HMI SCADA BERBASIS MODUL MIKROKONTROLER (HARDWARE SISTEM ALARM DAN KUNCI OTOMATIS)
") PINTU PEMBERITAHU KEGIATAN RUANGAN MENGGUNAKAN HMI SCADA BERBASIS MODUL MIKROKONTROLER (HARDWARE SISTEM ALARM DAN KUNCI OTOMATIS) Arvanida Feizal Permana 1, Sabar Pramono, BSEE., M.Eng. 2, Ir. Edi Rakhman,
PINTU PEMBERITAHU KEGIATAN RUANGAN MENGGUNAKAN HMI SCADA BERBASIS MODUL MIKROKONTROLER (HARDWARE SISTEM ALARM DAN KUNCI OTOMATIS) Arvanida Feizal Permana 1, Sabar Pramono, BSEE., M.Eng. 2, Ir. Edi Rakhman,
BAB III PERENCANAAN DAN IMPLEMENTASI
 BAB III PERENCANAAN DAN IMPLEMENTASI 3.1 Perancangan Sistem Pada bab ini akan dijelaskan tentang perancangan dan metode pengambilan data dari jaringan ad hoc pada aplikasi video conference. Dan akan dibagi
BAB III PERENCANAAN DAN IMPLEMENTASI 3.1 Perancangan Sistem Pada bab ini akan dijelaskan tentang perancangan dan metode pengambilan data dari jaringan ad hoc pada aplikasi video conference. Dan akan dibagi
Perancangan dan Simulasi Autotuning PID Controller Menggunakan Metoda Relay Feedback pada PLC Modicon M340. Renzy Richie /
 Perancangan dan Simulasi Autotuning PID Controller Menggunakan Metoda Relay Feedback pada PLC Modicon M340 Renzy Richie / 0622049 Email : renzyrichie@live.com Jurusan Teknik Elektro, Fakultas Teknik, Universitas
Perancangan dan Simulasi Autotuning PID Controller Menggunakan Metoda Relay Feedback pada PLC Modicon M340 Renzy Richie / 0622049 Email : renzyrichie@live.com Jurusan Teknik Elektro, Fakultas Teknik, Universitas
Modul ke: Aplikasi Kompoter. Sistim Operasi. Fakultas FTPD. Giri Purnama, S.Pd, M.Kom. Program Studi Teknik Sipil
 Modul ke: Aplikasi Kompoter Sistim Operasi Fakultas FTPD Giri Purnama, S.Pd, M.Kom. Program Studi Teknik Sipil http://www.mercubuana.ac.id Sistem Komputer Arsitektural Berkaitan dengan sebuah sistem yang
Modul ke: Aplikasi Kompoter Sistim Operasi Fakultas FTPD Giri Purnama, S.Pd, M.Kom. Program Studi Teknik Sipil http://www.mercubuana.ac.id Sistem Komputer Arsitektural Berkaitan dengan sebuah sistem yang
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER
 BERBASIS LOGIC SOLVER") PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
HALAMAN JUDUL TUGAS AKHIR TE Adetya Devritama NRP Dosen Pembimbing Ir. Ali Fatoni, M.T. Imam Arifin, S.T., M.T.
 HALAMAN JUDUL TUGAS AKHIR TE 141599 ANALISA METODE PENGATURAN ADAPTIF UNTUK PENALAAN OTOMATIS PARAMETER KONTROLER PID PADA SISTEM SUPERVISORY CONTROL AND DATA ACQUISITION (SCADA) Adetya Devritama NRP 2212100015
HALAMAN JUDUL TUGAS AKHIR TE 141599 ANALISA METODE PENGATURAN ADAPTIF UNTUK PENALAAN OTOMATIS PARAMETER KONTROLER PID PADA SISTEM SUPERVISORY CONTROL AND DATA ACQUISITION (SCADA) Adetya Devritama NRP 2212100015