BAB IV HASIL PENGUJIAN DAN ANALISA
|
|
|
- Hendra Tan
- 6 tahun lalu
- Tontonan:
Transkripsi
1 BAB IV HASIL PENGUJIAN DAN ANALISA 4.1 Pendahuluan Pada bab ini akan dijelaskan tentang simulasi dan hasil penelitian serta analisa Motor Switched Reluctance. Pengujian alat ini dilakukan di Laboratorium Progam Studi Teknik Elektro. Pada Tugas Akhir ini akan dilakukan analisa dan perbandingan terhadap motor dengan rangkaian seri maupun paralel, kecepatan Switched Reluctance Motor 3 fasa, serta di uraiakan hasil pengujian dan pembahasan. 4.2 Simulasi pada Software PSIM Simulasi tugas akhir ini menggunakan software PSIM, dengan demikian dapat memberikan gambaran hasil mendekati kondisi nyata. Pada simulasi ini masih menggunakan kontrol analog, di mana hidup matinya saklar statis diatur oleh time delay. Berikut merupakan skema sistem yang telah dirancang dan disimulasikan. 40
2 Gambar 4.1. Skema rangkaian Switched Reluctance Motor Pada simulasi ini digunakan inverter 3 fasa dengan 6 saklar. Untuk mengontrol posisi rotor dan kecepatan motor yang pertama dilakukan adalah dengan mengkonversi nilai kecepatan motor yang dihasilkan (RPM) menjadi rad/s di mana nilainya nanti akan digunakan sebagai acuan posisi sensor. Setelah itu nilai referensi dari posisi sensor akan digunakan untuk mengatur duty cycle pada saklar inverter, yang pada akhirnya akan mengatur kecepatan motor. Gambar 4.2. Skema rangkaian kontrol Switched Reluctance Motor 41

3 Gambar 4.3. Sinyal Hall Effect Pada simulasi ini, dihasilkan keluaran sinyal dari Hall effect di mana masing-masing sensor berjarak 30 0, kemudian keluaran dari sensor hall effect digunakan untuk mengatur mati hidupnya saklar pada inverter. Gambar 4.4. Arus Motor Switched Reluctance Dari Pensaklaran PWM akan mengendalikan inverter 3 fasa dan menentukan arah arus dari sumber menuju beban motor. Dan pada Gambar 4.4 menunjukkan bahwa motor sudah berputar. Ini membuktikan bahwa inverter tiga fasa yang berperan menjadi driver Motor Switched Reluctance sudah bekerja baik. 42


4 4.3 Hasil Alat Disini akan dibahas mengenai foto realisasi dari Motor Switched Reluctance, yang meliputi konstruksi rotor dan stator, konverter daya, dan rangkaian kontrol, untuk lebih jelasnya dapat dilihat dari Gambar di bawah ini. Gambar 4.5. Konstruksi Stator 6 Kutub Gambar 4.6. Konstruksi rotor 4 Kutub 43


5 Gambar 4.7. Rangkaian Konverter daya tipe N+1 swicthed konverter Gambar 4.8. Rangkaian buffer dan rangkaian kontrol digital dspic 30F

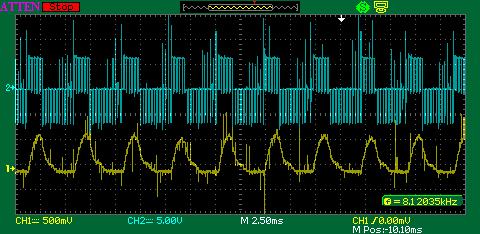
6 4.4 Pengujian Tegangan Dan Arus Pada tahap ini dilakukan pengujian terhadap tegangan dan arus dari Motor Switched Reluctance. Pada pengujian ini Motor Switched Reluctance dibagi menjadi 2 menurut rangkaian belitan statornya, yaitu saat rangkaian seri maupun paralel hal ini bertujuan untuk membandingkan mana yang lebih efisiensi dari kedua rangkaian stator tersebut. Dan masing-masing rangkaian dibagi menjadi 2 kondisi, yaitu dengan PWM maupun tanpa PWM Rangkaian Seri Tanpa PWM Dalam tahap ini, pengujian dilakukan dengan menggunakan catu daya DC sebagai sumber inverter 3 fasa. Dalam pengujian ini potensio diatur pada kondisi penuh, dan tanpa duty diartikan dengan 1. Pengujian diawali dengan melihat arus dari sumber apakah sudah mengalir arus atau belum. Gambar 4.9. Arus dari catu daya skala 10x (duty=1) 45

7 Kemudian tahap yang dilakukan adalah mengamati output dari mikrokontroler dspic30f2020 yang di mana digunakan PORTE mulai dari RE0- RE3 sebagai port keluaran. Gambar Output Mikrokontrol RE0, RE1, RE2 dan RE3 Dari gambar di atas ditunjukan sebagai output dari mikrokontrol yang nantinya akan menjadi inputan driver untuk mengendalikan IGBT pada inverter. Sinyal dari keluaran dspic30f2020 ini bergantung pada inputan mikrokontrol dari hall effect. Tahap berikutnya adalah mengamati bentuk gelombang masing-masing keluaran dari tegangan arus antar fasa. Gambar 4.11.Tegangan dan arus per fasa skala 10x Van 46



8 Gambar 4.12.Tegangan dan arus per fasa skala 10x Vbn Gambar Tegangan dan arus per fasa skala 10x Vcn Gambar Tegangan dan arus per fasa skala 10x Van,Vbn,Vcn dalam satu screen 47
9 Pada Gambar 4.14 terlihat bahwa tegangan per fasanya bergeser antara satu dengan yang lain. Pergeseran ini bertujuan agar terjadi perputaran oleh medan pada stator. Kemudian tahap pengujian yang yang perlu diamati berikutnya adalah tegangan antar fasa yaitu A-B, B-C, C-A. Gambar Tegangan antar fasa PWM Setelah sebelumnya, pengujian dilakukan tanpa PWM dan potensio berada pada kondisi penuh, maka dalam pengujian ini potensio diatur pada kondisi di mana motor dalam kondisi kecepatan maksimal. Pengujian tetap diawali dengan melihat arus dari sumber apakah sudah mengalir arus atau belum. 48


10 Gambar Arus dari catu daya skala 10x dengan PWM Dari gambar di atas dapat dibandingkan pada saat motor berjalan tanpa PWM dan dengan PWM, di mana pada kondisi dengan PWM terjadi peningkatan arus pada motor yang mengakibatkan torsi motor lebih besar dibanding dengan kondisi tanpa PWM. Kemudian tahap yang sama dilakukan adalah mengamati output dari mikrokontroler dspic30f2020. Gambar Output Mikrokontroller RE0, RE1, RE2 dan RE3 dengan PWM Dapat dilihat pada gambar bahwa setiap sinyal keluaran dari mikrokontroler dspic30f2020 ber-pwm dengan duty tertentu. Sinyal ini mengakibatkan kecepatan pada motor switched reluctance berubah, bahkan dalam kondisi kecepatan maksimal. Berikutnya adalah mengamati tegangan dan arus setiap fasa. 49


11 Gambar Tegangan dan arus per fasa skala 10x Van Gambar Tegangan dan arus per fasa skala 10x Vbn Gambar Tegangan dan arus per fasa skala 10x Vcn 50


12 Gambar Tegangan dan arus per fasa skala 10x Van,Vbn,Vcn dalam satu screen dengan PWM Sinyal pensaklaran berada pada kondisi dengan PWM sehingga mengakibatkan outputan dari inverter juga ber-pwm. Hasil Sinyal inilah yang menyebabkan kecepatan pada Motor Switched Reluctance dapat diatur secara variabel sesuai duty yang diinginkan. Berikutnya akan diamati tegangan dan arus antar fasanya. Gambar Tegangan dan arus antar fasa dengan PWM 51


13 Gambar RPM maksimal motor rangkaian seri Rangkaian Paralel Tanpa PWM Selanjutnya pengujian yang dilakukan adalah menganalisa tegangan dan arus dari Motor Switched Reluctance dengan rangkaian stator paralel, pengujian ini bertujuan untuk membandingkan hasil keluaran dari Motor Switched Reluctance jika dirangkai seri dan paralel. Dalam pengujian ini potensio diatur pada kondisi penuh, dan tanpa dengan duty diartikan 1. Pengujian diawali dengan melihat arus dari sumber apakah sudah mengalir arus atau belum. Gambar Arus dari catu daya skala 10x (duty=1) (paralel) 52

14 Kemudian tahap yang dilakukan selanjutnya adalah mengamati output dari mikrokontroler dspic30f2020 yang di mana digunakan PORTE mulai dari RE0- RE3 sebagai port keluaran. Gambar Output Mikrokontrol RE0, RE1, RE2 dan RE3 Tahap berikutnya adalah mengamati bentuk gelombang masing-masing keluaran dari tegangan arus antar fasa. Gambar Tegangan dan arus per fasa skala 10x Van 53


15 Gambar Tegangan dan arus per fasa skala 10x Vbn Gambar Tegangan dan arus per fasa skala 10x Vcn Gambar Tegangan dan arus per fasa skala 10x Van,Vbn,Vcn dalam satu screen 54

16 Pada gambar terlihat bahwa tegangan per fasanya bergeser antara satu dengan yang lain, dan jika dibandingkan dengan rangkaian seri terlihat arus pada paralel lebih kecil sehingga torsi yang dihasilkan lebih kecil dibandingkan rangkaian seri. Kemudian tahap pengujian yang yang perlu diamati berikutnya adalah tegangan antar fasa yaitu A-B, B-C, C-A. Gambar Tegangan antar fasa PWM Setelah sebelumnya, pengujian dilakukan tanpa PWM dan potensio berada pada kondisi penuh, maka dalam pengujian ini potensio diatur pada kondisi di mana motor dalam kondisi kecepatan maksimal. Pengujian tetap diawali dengan melihat arus dari sumber apakah sudah mengalir arus atau belum. 55
 Dari gambar di atas dapat dibandingkan pada saat motor berjalan tanpa PWM dan dengan PWM, di mana pada kondisi dengan PWM terjadi")

17 Gambar Arus dari catu daya skala 10x dengan PWM (paralel) Dari gambar di atas dapat dibandingkan pada saat motor berjalan tanpa PWM dan dengan PWM, di mana pada kondisi dengan PWM terjadi peningkatan arus pada motor yang mengakibatkan terjadinya peningkatan kecepatan putar dan torsi motor. Kemudian tahap yang sama dilakukan adalah mengamati output dari mikrokontroler dspic30f2020. Gambar Output Mikrokontroller RE0, RE1, RE2 dan RE3 dengan PWM Dapat dilihat pada gambar bahwa setiap sinyal keluaran dari mikrokontroler dspic30f2020 ber-pwm dengan duty tertentu. Sinyal ini mengakibatkan kecepatan pada Motor Switched Reluctance berubah, bahkan dalam kondisi kecepatan maksimal. Berikutnya adalah mengamati tegangan dan arus setiap fasa. 56



18 Gambar Tegangan dan arus per fasa skala 10x Van Gambar Tegangan dan arus per fasa skala 10x Vbn Gambar Tegangan dan arus per fasa skala 10x Vcn 57


19 Gambar Tegangan dan arus per fasa skala 10x Van,Vbn,Vcn dalam satu screen dengan PWM Sinyal pensklaran berada pada kondisi dengan PWM sehingga mengakibatkan outputan dari inverter juga ber-pwm. Hasil Sinyal inilah yang menyebabkan kecepatan pada Motor Switched Reluctance dapat diatur secara variabel sesuai duty yang diinginkan. Berikutnya akan diamati tegangan dan arus antar fasanya. Gambar Tegangan dan arus antar fasa dengan PWM 58

20 Dari pengujian ini, didapati bahwa arus keluaran pada rangkaian paralel lebih kecil dibandingkan dengan rangkaian seri, namun tegangan yang dihasilkan lebih besar sehingga pada rangkaian paralel kecepatan motor lebih maksimal. Gambar RPM maksimal motor rangkaian parallel 59
21 4.5 Hasil Pengamatan Pengamatan yang telah dilakukan sebelumnya, bertujuan untuk membandingkan hasil keluaran berupa kecepatan, tegangan, dan arus saat dirangkai seri maupun paralel baik dengan PWM atau tanpa PWM. Dan untuk hasilnya dapat dilihat dari tabel berikut ini: Tabel Hasil Pengamatan Seri Paralel non PWM PWM non PWM PWM RPM Tegangan (V) 60 v 60 v 8 20 Arus (I) 1.8 a 0.7 a 2.5 a 3.0 a Dari tabel diatas, dapat disimpulkan bahwa motor mencapai rpm maksimal pada kondisi dengan PWM. Saat motor dirangkai paralel arus keluarannya lebih besar dibandingkan saat dirangkai seri, namun tegangan keluarannya lebih kecil dibandingkan dengan rangkaian seri, dan motor dengan rangkaian paralel menghasilkan rpm yang lebih besar dibandingkan dengan rangkaian seri. 60
DESAIN & OPERASI MOTOR SWITCH RELUCTANCE 4 KUTUB ROTOR 6 KUTUB STATOR LAPORAN TUGAS AKHIR. Oleh : MOSES EDUARD LUBIS
 DESAIN & OPERASI MOTOR SWITCH RELUCTANCE 4 KUTUB ROTOR 6 KUTUB STATOR LAPORAN TUGAS AKHIR Oleh : MOSES EDUARD LUBIS 12.50.0003 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA
DESAIN & OPERASI MOTOR SWITCH RELUCTANCE 4 KUTUB ROTOR 6 KUTUB STATOR LAPORAN TUGAS AKHIR Oleh : MOSES EDUARD LUBIS 12.50.0003 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA
BAB IV HASIL PENGUJIAN DAN ANALISA
 BAB IV HASIL PENGUJIAN DAN ANALISA 4.1 Pendahuluan Pada bab IV ini akan diuraikan hasil simulasi dan implementasi dari tugas akhir ini tentang pompa air BLDC tenaga surya dengan satu kendali antara driver
BAB IV HASIL PENGUJIAN DAN ANALISA 4.1 Pendahuluan Pada bab IV ini akan diuraikan hasil simulasi dan implementasi dari tugas akhir ini tentang pompa air BLDC tenaga surya dengan satu kendali antara driver
DESAIN DAN IMPLEMENTASI POMPA AIR MOTOR BLDC DENGAN SUPLAI DARI PANEL SURYA
 DESAIN DAN IMPLEMENTASI POMPA AIR MOTOR BLDC DENGAN SUPLAI DARI PANEL SURYA LAPORAN TUGAS AKHIR Oleh : F. DIAN FAJAR WALUYO 12.50.0015 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA
DESAIN DAN IMPLEMENTASI POMPA AIR MOTOR BLDC DENGAN SUPLAI DARI PANEL SURYA LAPORAN TUGAS AKHIR Oleh : F. DIAN FAJAR WALUYO 12.50.0015 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA
BAB III RANCANGAN DESAIN DAN IMPLEMENTASI POMPA AIR MOTOR BLDC DENGAN SUPLAI DARI PANEL SURYA
 BAB III RANCANGAN DESAIN DAN IMPLEMENTASI POMPA AIR MOTOR BLDC DENGAN SUPLAI DARI PANEL SURYA 3. 1. Pendahuluan Pada tugas akhir akan membahas tentang memaksimalkan daya hasil konversi energi matahari
BAB III RANCANGAN DESAIN DAN IMPLEMENTASI POMPA AIR MOTOR BLDC DENGAN SUPLAI DARI PANEL SURYA 3. 1. Pendahuluan Pada tugas akhir akan membahas tentang memaksimalkan daya hasil konversi energi matahari
BAB III PERANCANGAN DESAIN POMPA AIR BRUSHLESS DC. DENGAN MENGGUNAKAN dspic30f2020
 BAB III PERANCANGAN DESAIN POMPA AIR BRUSHLESS DC DENGAN MENGGUNAKAN dspic30f2020 3.1. Pendahuluan Pada bab III ini akan dijelaskan mengenai perancangan Pompa Air Brushless DC yang dikendalikan oleh Inverter
BAB III PERANCANGAN DESAIN POMPA AIR BRUSHLESS DC DENGAN MENGGUNAKAN dspic30f2020 3.1. Pendahuluan Pada bab III ini akan dijelaskan mengenai perancangan Pompa Air Brushless DC yang dikendalikan oleh Inverter
BAB III PERANCANGAN DAN IMPLEMENTASI SWITCHED RELUCTANCE MOTOR
 III PERNNGN DN IMPLEMENTI WITHED RELUTNE MOTOR 3.1 Pendahuluan Pada bab ini penulis akan menjelaskan tentang rangkaian witched Reluctance Motor 3 fasa, rangkaian motor ini menggunakan komponen-komponen
III PERNNGN DN IMPLEMENTI WITHED RELUTNE MOTOR 3.1 Pendahuluan Pada bab ini penulis akan menjelaskan tentang rangkaian witched Reluctance Motor 3 fasa, rangkaian motor ini menggunakan komponen-komponen
BAB III DESAIN BUCK CHOPPER SEBAGAI CATU POWER LED DENGAN KENDALI ARUS. Pada bagian ini akan dibahas cara menkontrol converter tipe buck untuk
 BAB III DESAIN BUCK CHOPPER SEBAGAI CATU POWER LED DENGAN KENDALI ARUS 3.1. Pendahuluan Pada bagian ini akan dibahas cara menkontrol converter tipe buck untuk menghidupkan HPL (High Power LED) dengan watt
BAB III DESAIN BUCK CHOPPER SEBAGAI CATU POWER LED DENGAN KENDALI ARUS 3.1. Pendahuluan Pada bagian ini akan dibahas cara menkontrol converter tipe buck untuk menghidupkan HPL (High Power LED) dengan watt
BAB I PENDAHULUAN. efesiensi, torsi, kecepatan tinggi dan dapat divariasikan, serta biaya perawatan
 BAB I PENDAHULUAN 1.1 Latar Belakang Seiring perkembangan teknologi, kebutuhan akan motor yang memiliki efesiensi, torsi, kecepatan tinggi dan dapat divariasikan, serta biaya perawatan rendah semakin meningkat.
BAB I PENDAHULUAN 1.1 Latar Belakang Seiring perkembangan teknologi, kebutuhan akan motor yang memiliki efesiensi, torsi, kecepatan tinggi dan dapat divariasikan, serta biaya perawatan rendah semakin meningkat.
BAB IV HASIL PENGUJIAN DAN PEMBAHASAN
 BAB IV HASIL PENGUJIAN DAN PEMBAHASAN 4.1 Pendahuluan Pada bab ini dibahas hasil dari pengujian alat implementasi tugas akhir yang dilakukan di laboratorium Tugas Akhir Program Studi Teknik Elektro. Dengan
BAB IV HASIL PENGUJIAN DAN PEMBAHASAN 4.1 Pendahuluan Pada bab ini dibahas hasil dari pengujian alat implementasi tugas akhir yang dilakukan di laboratorium Tugas Akhir Program Studi Teknik Elektro. Dengan
KENDALI KECEPATAN MOTOR DC MELALUI DETEKSI PUTARAN ROTOR DENGAN MIKROKONTROLLER dspic30f4012
 KENDALI KECEPATAN MOTOR DC MELALUI DETEKSI PUTARAN ROTOR DENGAN MIKROKONTROLLER dspic30f4012 TUGAS AKHIR Arief Catur Utomo 10.50.0007 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA
KENDALI KECEPATAN MOTOR DC MELALUI DETEKSI PUTARAN ROTOR DENGAN MIKROKONTROLLER dspic30f4012 TUGAS AKHIR Arief Catur Utomo 10.50.0007 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA
PERANCANGAN SWITCHED RELUCTANCE MOTOR 3 FASA SEDERHANA DENGAN 4 KUTUB ROTOR
 PERANCANGAN SWITCHED RELUCTANCE MOTOR 3 FASA SEDERHANA DENGAN 4 KUTUB ROTOR TUGAS AKHIR Disusun Oleh: Kevin Santoso 11.50.00014 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS SOEGIJAPRANATA SEMARANG
PERANCANGAN SWITCHED RELUCTANCE MOTOR 3 FASA SEDERHANA DENGAN 4 KUTUB ROTOR TUGAS AKHIR Disusun Oleh: Kevin Santoso 11.50.00014 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS SOEGIJAPRANATA SEMARANG
BAB I PENDAHULUAN. adalah lebih hemat energi. Untuk menghidupkan lampu LED tersebut dapat
 BAB I PENDAHULUAN 1.1 Latar Belakang Seiring dengan perkembangan teknologi dalam sektor pencahayaan yang berfungsi untuk pencahayaan jalan perkotaan, industri, dan pencahayaan rumah. Banyak ilmuwan menciptakan
BAB I PENDAHULUAN 1.1 Latar Belakang Seiring dengan perkembangan teknologi dalam sektor pencahayaan yang berfungsi untuk pencahayaan jalan perkotaan, industri, dan pencahayaan rumah. Banyak ilmuwan menciptakan
PERANCANGAN BRUSHLESS DC MOTOR 3 FASA SEDERHANADENGAN 4 KUTUB ROTOR
 PERANCANGAN BRUSHLESS DC MOTOR 3 FASA SEDERHANADENGAN 4 KUTUB ROTOR TUGAS AKHIR Oleh: Adi Citra Kristari 10.50.0001 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA SEMARANG
PERANCANGAN BRUSHLESS DC MOTOR 3 FASA SEDERHANADENGAN 4 KUTUB ROTOR TUGAS AKHIR Oleh: Adi Citra Kristari 10.50.0001 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA SEMARANG
BAB I PENDAHULUAN. Teknologi konverter elektronika daya telah banyak digunakan pada. kehidupan sehari-hari. Salah satunya yaitu dc dc konverter.
 BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi konverter elektronika daya telah banyak digunakan pada kehidupan sehari-hari. Salah satunya yaitu dc dc konverter. DC-DC konverter merupakan komponen penting
BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi konverter elektronika daya telah banyak digunakan pada kehidupan sehari-hari. Salah satunya yaitu dc dc konverter. DC-DC konverter merupakan komponen penting
BAB IV HASIL PENGUJIAN DAN ANALISA. Pada bab ini akan dibahas hasil pengujian dan analisa dari system buck chopper
 BAB IV HASIL PENGUJIAN DAN ANALISA Pada bab ini akan dibahas hasil pengujian dan analisa dari system buck chopper dengan metode constant current untuk menghidupkan high power led berbasis microcontroller
BAB IV HASIL PENGUJIAN DAN ANALISA Pada bab ini akan dibahas hasil pengujian dan analisa dari system buck chopper dengan metode constant current untuk menghidupkan high power led berbasis microcontroller
ANALISIS PERBANDINGAN REGULASI TEGANGAN GENERATOR INDUKSI PENGUATAN SENDIRI TANPA MENGGUNAKAN KAPASITOR KOMPENSASI DAN DENGAN MENGGUNAKAN KAPASITOR
 ANALISIS PERBANDINGAN REGULASI TEGANGAN GENERATOR INDUKSI PENGUATAN SENDIRI TANPA MENGGUNAKAN KAPASITOR KOMPENSASI DAN DENGAN MENGGUNAKAN KAPASITOR KOMPENSASI (Aplikasi pada Laboratorium Konversi Energi
ANALISIS PERBANDINGAN REGULASI TEGANGAN GENERATOR INDUKSI PENGUATAN SENDIRI TANPA MENGGUNAKAN KAPASITOR KOMPENSASI DAN DENGAN MENGGUNAKAN KAPASITOR KOMPENSASI (Aplikasi pada Laboratorium Konversi Energi
BAB IV. HASIL PENELITIAN dan PEMBAHASAN
 BAB IV HASIL PENELITIAN dan PEMBAHASAN 4.1 Pendahuluan Pada bab ini penulis akan mebahas lebih lanjut setelah perancangan dan konsep pada bab sebelumnya telah diaplikasikan ke sebuah bidang nyata. Realisasi
BAB IV HASIL PENELITIAN dan PEMBAHASAN 4.1 Pendahuluan Pada bab ini penulis akan mebahas lebih lanjut setelah perancangan dan konsep pada bab sebelumnya telah diaplikasikan ke sebuah bidang nyata. Realisasi
BAB IV HASIL PENGUJIAN DAN ANALISA
 BAB IV HASIL PENGUJIAN DAN ANALISA 4.1 Pendahuluan Pada bab empat ini akan dijelaskan tentang hasil dan simulasi. Pada implementasinya menggunakan mikrokontroller dalam bentuk digital signal controller
BAB IV HASIL PENGUJIAN DAN ANALISA 4.1 Pendahuluan Pada bab empat ini akan dijelaskan tentang hasil dan simulasi. Pada implementasinya menggunakan mikrokontroller dalam bentuk digital signal controller
LAPORAN PENELITIAN HIBAH BERSAING DENGAN BIAYA BOPTN
 LAPORAN PENELITIAN HIBAH BERSAING DENGAN BIAYA BOPTN RANCANG BANGUN KENDALI DIGITAL MOTOR BLDC UNTUK MOBIL LISTRIK UNIVERSITAS JEMBER Tahun ke 1 dari rencana 2 tahun Oleh Hari Arbiantara Basuki, ST., MT
LAPORAN PENELITIAN HIBAH BERSAING DENGAN BIAYA BOPTN RANCANG BANGUN KENDALI DIGITAL MOTOR BLDC UNTUK MOBIL LISTRIK UNIVERSITAS JEMBER Tahun ke 1 dari rencana 2 tahun Oleh Hari Arbiantara Basuki, ST., MT
SISTEM PENGENDALIAN MOTOR SINKRON SATU FASA BERBASIS MIKROKONTROLER
 SISTEM PENGENDALIAN MOTOR SINKRON SATU FASA BERBASIS MIKROKONTROLER Deni Almanda 1, Anodin Nur Alamsyah 2 1) 2) Jurusan Teknik Elektro Fakultas Teknik Universitas Muhammadiyah Jakarta Jl. Cempaka Putih
SISTEM PENGENDALIAN MOTOR SINKRON SATU FASA BERBASIS MIKROKONTROLER Deni Almanda 1, Anodin Nur Alamsyah 2 1) 2) Jurusan Teknik Elektro Fakultas Teknik Universitas Muhammadiyah Jakarta Jl. Cempaka Putih
BAB III RANCANGAN SMPS JENIS PUSH PULL. Pada bab ini dijelaskan tentang perancangan power supply switching push pull
 BAB III RANCANGAN SMPS JENIS PUSH PULL 3.1 Pendahuluan Pada bab ini dijelaskan tentang perancangan power supply switching push pull konverter sebagai catu daya kontroler. Power supply switching akan mensupply
BAB III RANCANGAN SMPS JENIS PUSH PULL 3.1 Pendahuluan Pada bab ini dijelaskan tentang perancangan power supply switching push pull konverter sebagai catu daya kontroler. Power supply switching akan mensupply
BAB III DESAIN DAN IMPLEMENTASI
 BAB III DESAIN DAN IMPLEMENTASI 3.1 Pendahuluan Pada tugas akhir ini akan membahas tentang pengisian batere dengan metode constant current constant voltage. Pada implementasinya mengunakan rangkaian konverter
BAB III DESAIN DAN IMPLEMENTASI 3.1 Pendahuluan Pada tugas akhir ini akan membahas tentang pengisian batere dengan metode constant current constant voltage. Pada implementasinya mengunakan rangkaian konverter
PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM
 PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM Fandy Hartono 1 2203 100 067 Dr. Tri Arief Sardjono, ST. MT. 2-1970 02 12 1995 12 1001 1 Penulis, Mahasiswa S-1
PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM Fandy Hartono 1 2203 100 067 Dr. Tri Arief Sardjono, ST. MT. 2-1970 02 12 1995 12 1001 1 Penulis, Mahasiswa S-1
INVERTER MODULASI LEBAR PULSA SINUSOIDA. BERBASIS dspic 30F4012
 INVERTER MODULASI LEBAR PULSA SINUSOIDA BERBASIS dspic 30F4012 TUGAS AKHIR Oleh : YUNI RAHMAWATI 09.50.0019 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA SEMARANG 2014
INVERTER MODULASI LEBAR PULSA SINUSOIDA BERBASIS dspic 30F4012 TUGAS AKHIR Oleh : YUNI RAHMAWATI 09.50.0019 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA SEMARANG 2014
BAB I PENDAHULUAN. Pada suatu kondisi tertentu motor harus dapat dihentikan segera. Beberapa
 BAB I PENDAHULUAN 1.1 Latar Belakang Dewasa ini pada umumnya industri memerlukan motor sebagai penggerak, adapun motor yang sering digunakan adalah motor induksi,karena konstruksinya yang sederhana, kuat
BAB I PENDAHULUAN 1.1 Latar Belakang Dewasa ini pada umumnya industri memerlukan motor sebagai penggerak, adapun motor yang sering digunakan adalah motor induksi,karena konstruksinya yang sederhana, kuat
BAB I PENDAHULUAN. digunakan untuk mengontrol dan bisa diprogram sesuai dengan kebutuhan, yang
 BAB I PENDAHULUAN 1.1. Latar Belakang Masalah PLC (Programmable Logic Control) merupakan suatu peralatan yang digunakan untuk mengontrol dan bisa diprogram sesuai dengan kebutuhan, yang biasanya digunakan
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah PLC (Programmable Logic Control) merupakan suatu peralatan yang digunakan untuk mengontrol dan bisa diprogram sesuai dengan kebutuhan, yang biasanya digunakan
MOTOR DC BRUSHLESS TIGA FASA-SATU KUTUB
 ORBITH Vol. 8 No. 1 Maret 2012: 32-37 MOTOR DC BRUSHLESS TIGA FASA-SATU KUTUB Oleh : Djodi Antono Staf Pengajar Jurusan Teknik Elektro Politeknik Negeri Semarang Jln. Prof. Sudarto Tembalang Semarang 50275
ORBITH Vol. 8 No. 1 Maret 2012: 32-37 MOTOR DC BRUSHLESS TIGA FASA-SATU KUTUB Oleh : Djodi Antono Staf Pengajar Jurusan Teknik Elektro Politeknik Negeri Semarang Jln. Prof. Sudarto Tembalang Semarang 50275
Rancang Bangun Inverter Tiga Phasa Back to Back Converter Pada Sistem Konversi Energi Angin
 Rancang Bangun Inverter Tiga Phasa Back to Back Converter Pada Sistem Konversi Energi Angin Rifdian I.S Program Studi Diploma III Teknik Listrik Bandar Udara Akademi Teknik dan Keselamatan Penerbangan
Rancang Bangun Inverter Tiga Phasa Back to Back Converter Pada Sistem Konversi Energi Angin Rifdian I.S Program Studi Diploma III Teknik Listrik Bandar Udara Akademi Teknik dan Keselamatan Penerbangan
III. METODOLOGI PENELITIAN. Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009
 III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
III. METODE PENELITIAN. Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Agustus
 III. METODE PENELITIAN A. Tempat dan Waktu Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Agustus 2009, dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium Sistem
III. METODE PENELITIAN A. Tempat dan Waktu Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Agustus 2009, dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium Sistem
BAB I PENDAHULUAN. 1.1 Latar Belakang Penelitian
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Penelitian Dalam sepuluh tahun terakhir perkembangan mengenai teknologi konversi energi mengalami kemajuan yang sangat pesat. Hal ini disebabkan oleh penetrasi yang
1 BAB I PENDAHULUAN 1.1 Latar Belakang Penelitian Dalam sepuluh tahun terakhir perkembangan mengenai teknologi konversi energi mengalami kemajuan yang sangat pesat. Hal ini disebabkan oleh penetrasi yang
BAB I PENDAHULUAN. aplikasi dari konverter dc-dc adalah untuk sistem battery charger. Pada aplikasi
 BAB I PENDAHULUAN 1.1 Latar Belakang Salah satu bidang ilmu kelistrikan yang sedang berkembang pesat dan berpengaruh dalam perkembangan teknologi masa kini adalah bidang elektronika daya. Perkembangan
BAB I PENDAHULUAN 1.1 Latar Belakang Salah satu bidang ilmu kelistrikan yang sedang berkembang pesat dan berpengaruh dalam perkembangan teknologi masa kini adalah bidang elektronika daya. Perkembangan
KENDALI VARIABEL VOLTAGE VARIABEL FREKUENSI PADA MOTOR INDUKSI SATU FASA BERBASIS MIKROKONTROL ATMEGA8535 LAPORAN TUGAS AKHIR OLEH : MATHIAS WINDY
 KENDALI VARIABEL VOLTAGE VARIABEL FREKUENSI PADA MOTOR INDUKSI SATU FASA BERBASIS MIKROKONTROL ATMEGA8535 LAPORAN TUGAS AKHIR OLEH : MATHIAS WINDY 04.50.0002 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI
KENDALI VARIABEL VOLTAGE VARIABEL FREKUENSI PADA MOTOR INDUKSI SATU FASA BERBASIS MIKROKONTROL ATMEGA8535 LAPORAN TUGAS AKHIR OLEH : MATHIAS WINDY 04.50.0002 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI
RANCANG BANGUN PENGENDALIAN MOTOR PENGGERAK MOBIL LISTRIK DESIGN AND BUILD CONTROLLER MOTOR DRIVER ELECTRIC CAR
 RANCANG BANGUN PENGENDALIAN MOTOR PENGGERAK MOBIL LISTRIK DESIGN AND BUILD CONTROLLER MOTOR DRIVER ELECTRIC CAR Mohammad Lutfi Raynandy; Sofian Yahya, Drs., SST., MT ; Waluyo Musiono Bintoro, SST., M.Eng
RANCANG BANGUN PENGENDALIAN MOTOR PENGGERAK MOBIL LISTRIK DESIGN AND BUILD CONTROLLER MOTOR DRIVER ELECTRIC CAR Mohammad Lutfi Raynandy; Sofian Yahya, Drs., SST., MT ; Waluyo Musiono Bintoro, SST., M.Eng
RANCANG BANGUN PENGGERAK GOKART MENGGUNAKAN BLDC MOTOR
 RANCANG BANGUN PENGGERAK GOKART MENGGUNAKAN BLDC MOTOR LAPORAN TUGAS AKHIR Diajukan untuk Memenuhi Sebagian Persyaratan dalam Menyelesaikan Program Pendidikan Diploma III Jurusan Teknik Elektro Program
RANCANG BANGUN PENGGERAK GOKART MENGGUNAKAN BLDC MOTOR LAPORAN TUGAS AKHIR Diajukan untuk Memenuhi Sebagian Persyaratan dalam Menyelesaikan Program Pendidikan Diploma III Jurusan Teknik Elektro Program
BAB I PENDAHULUAN. dibutuhkan sistem kendali yang efektif, efisien dan tepat. Sesuai dengan
 BAB I PENDAHULUAN 1.1 Latar Belakang Motor DC (Direct Current) adalah motor yang menggunakan sumber tegangan searah. Terdapat beberapa jenis motor DC yang tersedia, diantaranya adalah motor DC dengan kumparan
BAB I PENDAHULUAN 1.1 Latar Belakang Motor DC (Direct Current) adalah motor yang menggunakan sumber tegangan searah. Terdapat beberapa jenis motor DC yang tersedia, diantaranya adalah motor DC dengan kumparan
MOTOR SINKRON 3 FASA SEDERHANA DENGAN 2 KUTUB ROTOR BERBASIS DIGITAL
 MOTOR SINKRON 3 FASA SEDERHANA DENGAN 2 KUTUB ROTOR BERBASIS DIGITAL TUGAS AKHIR Oleh : YOSAFAT ADITYAS NUGROHO 09.50.0005 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA
MOTOR SINKRON 3 FASA SEDERHANA DENGAN 2 KUTUB ROTOR BERBASIS DIGITAL TUGAS AKHIR Oleh : YOSAFAT ADITYAS NUGROHO 09.50.0005 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA
MAXIMUM POWER POINT TRACKER DENGAN METODE INCREMENTAL CONDUCTANCE TRANSCONDUCTANCE CONTROL BERBASIS. dspic30f4012
 MAXIMUM POWER POINT TRACKER DENGAN METODE INCREMENTAL CONDUCTANCE TRANSCONDUCTANCE CONTROL BERBASIS dspic30f4012 LAPORAN TUGAS AKHIR Oleh : YUNAN WIBISONO 10.50.0011 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS
MAXIMUM POWER POINT TRACKER DENGAN METODE INCREMENTAL CONDUCTANCE TRANSCONDUCTANCE CONTROL BERBASIS dspic30f4012 LAPORAN TUGAS AKHIR Oleh : YUNAN WIBISONO 10.50.0011 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS
DESAIN DAN IMPLEMENTASI SISTEM PENGISI BATERAI TENAGA SURYA MENGGUNAKAN METODE INCREMENTAL CONDUCTANCE-VOLTAGE CONTROL BERBASIS dspic30f4012
 DESAIN DAN IMPLEMENTASI SISTEM PENGISI BATERAI TENAGA SURYA MENGGUNAKAN METODE INCREMENTAL CONDUCTANCE-VOLTAGE CONTROL BERBASIS dspic30f4012 LAPORAN TUGAS AKHIR Oleh : ADHI KURNIAWAN SUGIARTO 10.50.0023
DESAIN DAN IMPLEMENTASI SISTEM PENGISI BATERAI TENAGA SURYA MENGGUNAKAN METODE INCREMENTAL CONDUCTANCE-VOLTAGE CONTROL BERBASIS dspic30f4012 LAPORAN TUGAS AKHIR Oleh : ADHI KURNIAWAN SUGIARTO 10.50.0023
INVERTER SATU FASA GELOMBANG PENUH SEBAGAI PENGGERAK POMPA AIR DENGAN KENDALI DIGITAL
 INVERTER SATU FASA GELOMBANG PENUH SEBAGAI PENGGERAK POMPA AIR DENGAN KENDALI DIGITAL TUGAS AKHIR Oleh : Nikolas Kristiawan Harsoyo 10.50.0015 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIKA SOEGIJAPRANATA
INVERTER SATU FASA GELOMBANG PENUH SEBAGAI PENGGERAK POMPA AIR DENGAN KENDALI DIGITAL TUGAS AKHIR Oleh : Nikolas Kristiawan Harsoyo 10.50.0015 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIKA SOEGIJAPRANATA
Kendali Sistem Pengisi Baterai Tenaga Surya Metode Incremental Conductance Berbasis Mikrokontrol
 Kendali Sistem Pengisi Baterai Tenaga Metode Incremental Conductance Berbasis Mikrokontrol Eric Eko Nurcahyo dan Leonardus. H. Pratomo Prog.Di Teknik Elektro Fakultas Teknik Universitas Katolik Soegijapranata
Kendali Sistem Pengisi Baterai Tenaga Metode Incremental Conductance Berbasis Mikrokontrol Eric Eko Nurcahyo dan Leonardus. H. Pratomo Prog.Di Teknik Elektro Fakultas Teknik Universitas Katolik Soegijapranata
INVERTER TIPE VOLT/HERTZ TIGA FASA DENGAN INJEKSI HARMONISA ORDE KE TIGA
 INVERTER TIPE VOLT/HERTZ TIGA FASA DENGAN INJEKSI HARMONISA ORDE KE TIGA LAPORAN TUGAS AKHIR Oleh : MAHARDIAN KURNIAWAN 03.50.0049 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS KATOLIK
INVERTER TIPE VOLT/HERTZ TIGA FASA DENGAN INJEKSI HARMONISA ORDE KE TIGA LAPORAN TUGAS AKHIR Oleh : MAHARDIAN KURNIAWAN 03.50.0049 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS KATOLIK
BAB I PENDAHULUAN. 1.1 Latar Belakang
 1.1 Latar Belakang BAB I PENDAHULUAN SRM (switched reluctance motor) atau sering disebut variable reluctance motor adalah mesin listrik sinkron yang mengubah torsi reluktansi menjadi daya mekanik. SRM
1.1 Latar Belakang BAB I PENDAHULUAN SRM (switched reluctance motor) atau sering disebut variable reluctance motor adalah mesin listrik sinkron yang mengubah torsi reluktansi menjadi daya mekanik. SRM
INVERTER DUA FASA SEBAGAI PENGENDALI. MOTOR HYSTERISIS BERBASIS dspic33fj16gs502 TUGAS AKHIR
 INVERTER DUA FASA SEBAGAI PENGENDALI MOTOR HYSTERISIS BERBASIS dspic33fj16gs502 TUGAS AKHIR Oleh Matius Hendi Susilo 12.50.0008 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIKA SOEGIJAPRANATA SEMARANG
INVERTER DUA FASA SEBAGAI PENGENDALI MOTOR HYSTERISIS BERBASIS dspic33fj16gs502 TUGAS AKHIR Oleh Matius Hendi Susilo 12.50.0008 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIKA SOEGIJAPRANATA SEMARANG
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM 3.1 Pendahuluan Pada bab ini akan dibahas tentang perancangan dua buah inverter satu fasa untuk menggerakan motor listrik jenis hysteresis motor yang berbasis dspic33fj16gs502.
BAB III PERANCANGAN SISTEM 3.1 Pendahuluan Pada bab ini akan dibahas tentang perancangan dua buah inverter satu fasa untuk menggerakan motor listrik jenis hysteresis motor yang berbasis dspic33fj16gs502.
NAMA :M. FAISAL FARUQI NIM : TUGAS:ELEKTRONIKA DAYA -BUCK CONVERTER
 NAMA :M. FAISAL FARUQI NIM :2201141004 TUGAS:ELEKTRONIKA DAYA -BUCK CONVERTER Rangkaian ini merupakan salah satu konverter DC-DC pada Elektronika Daya (ELDA). Dengan rangkaian Buck-Converter ini, kita
NAMA :M. FAISAL FARUQI NIM :2201141004 TUGAS:ELEKTRONIKA DAYA -BUCK CONVERTER Rangkaian ini merupakan salah satu konverter DC-DC pada Elektronika Daya (ELDA). Dengan rangkaian Buck-Converter ini, kita
1 BAB I PENDAHULUAN. bidang ilmu kelistrikan yang menggabungkan ilmu elektronika dengan ilmu ketenaga-listrikan.
 1 BAB I PENDAHULUAN 1.1 Latar Belakang Salah satu bidang ilmu kelistrikan yang sedang berkembang pesat dan berpengaruh dalam perkembangan teknologi masa kini adalah bidang elektronika daya. Elektronika
1 BAB I PENDAHULUAN 1.1 Latar Belakang Salah satu bidang ilmu kelistrikan yang sedang berkembang pesat dan berpengaruh dalam perkembangan teknologi masa kini adalah bidang elektronika daya. Elektronika
Inverter Satu Fase dengan Pola Penyaklaran SPWM
 17 Januari 2013 Inverter Satu Fase dengan Pola Penyaklaran SPWM Yohan Fajar Sidik yohanfajarsidik@live.com PPT ini untuk anak magatrika. Abstrak PPT ini dibuat untuk presentasi tugas akhir mata kuliah
17 Januari 2013 Inverter Satu Fase dengan Pola Penyaklaran SPWM Yohan Fajar Sidik yohanfajarsidik@live.com PPT ini untuk anak magatrika. Abstrak PPT ini dibuat untuk presentasi tugas akhir mata kuliah
Skema Pengendali Motor BLDC Tanpa Sensor Posisi Rotor dengan Metode Deteksi Back EMF Berbasis Mikrokontroler Arduino
 Vol. 2, No. 2, Desember 2016 22 Skema Pengendali Motor BLDC Tanpa Sensor Posisi Rotor dengan Metode Deteksi Back EMF Berbasis Mikrokontroler Arduino Tri Wahono, Tole Sutikno Program Studi Teknik Elektro,
Vol. 2, No. 2, Desember 2016 22 Skema Pengendali Motor BLDC Tanpa Sensor Posisi Rotor dengan Metode Deteksi Back EMF Berbasis Mikrokontroler Arduino Tri Wahono, Tole Sutikno Program Studi Teknik Elektro,
IMPLEMENTASI MOTOR INDUKSI LINIER BERBASIS DIGITAL
 IMPLEMENTASI MOTOR INDUKSI LINIER BERBASIS DIGITAL TUGAS AKHIR AGUNG AMINUDDIN 09.50.0026 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA SEMARANG 2014 LEMBAR PENGESAHAN
IMPLEMENTASI MOTOR INDUKSI LINIER BERBASIS DIGITAL TUGAS AKHIR AGUNG AMINUDDIN 09.50.0026 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA SEMARANG 2014 LEMBAR PENGESAHAN
BAB I PENDAHULUAN. tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar)
 dan kumparan jangkar disebut rotor (bagian yang berputar)") BAB I PENDAHULUAN 1.1 Latar Belakang Pada motor arus searah (motor DC) energi listrik yang diubah adalah energi arus searah yang berasal dari sumber tegangan listrik arus searah. Dimana sumber tegangan
BAB I PENDAHULUAN 1.1 Latar Belakang Pada motor arus searah (motor DC) energi listrik yang diubah adalah energi arus searah yang berasal dari sumber tegangan listrik arus searah. Dimana sumber tegangan
SISTEM POMPA AIR BERTENAGA SURYA TUGAS AKHIR
 SISTEM POMPA AIR BERTENAGA SURYA TUGAS AKHIR OLEH : YOANNA DWITYA ARSANTI 10.50.0005 FAKULTAS TEKNIK PROGRAM STUDI TEKNIK ELEKTRO UNIVERSITAS KATOLIK SOEGIJAPRANATA SEMARANG 2015 LEMBAR PENGESAHAN Laporan
SISTEM POMPA AIR BERTENAGA SURYA TUGAS AKHIR OLEH : YOANNA DWITYA ARSANTI 10.50.0005 FAKULTAS TEKNIK PROGRAM STUDI TEKNIK ELEKTRO UNIVERSITAS KATOLIK SOEGIJAPRANATA SEMARANG 2015 LEMBAR PENGESAHAN Laporan
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Perancangan merupakan proses yang kita lakukan terhadap alat, mulai dari rancangan kerja rangkaian hingga hasil jadi yang akan difungsikan. Perancangan dan pembuatan alat merupakan
BAB III PERANCANGAN ALAT Perancangan merupakan proses yang kita lakukan terhadap alat, mulai dari rancangan kerja rangkaian hingga hasil jadi yang akan difungsikan. Perancangan dan pembuatan alat merupakan
III. METODE PENELITIAN. Penelitian ini dilaksanakan pada bulan Juli 2012 sampai dengan Januari 2013.
 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian ini dilaksanakan pada bulan Juli 2012 sampai dengan Januari 2013. Perancangan alat penelitian dilakukan di Laboratorium Elektronika, Laboratorium
III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian ini dilaksanakan pada bulan Juli 2012 sampai dengan Januari 2013. Perancangan alat penelitian dilakukan di Laboratorium Elektronika, Laboratorium
Simulasi dan Analisis Konverter Kaskade Buck- Boost Dua Arah sebagai Pencatu Tegangan Inverter Motor Induksi pada Mobil Listrik
 Simulasi dan Analisis Konverter Kaskade Buck- Boost Dua Arah sebagai Pencatu Tegangan Inverter Motor Induksi pada Mobil Listrik Ahsin Hariri, Mochamad Ashari, Sjamsjul Anam Jurusan Teknik Elektro Fakultas
Simulasi dan Analisis Konverter Kaskade Buck- Boost Dua Arah sebagai Pencatu Tegangan Inverter Motor Induksi pada Mobil Listrik Ahsin Hariri, Mochamad Ashari, Sjamsjul Anam Jurusan Teknik Elektro Fakultas
DC-DC Step-Up Converter Rasio Tinggi Kombinasi Charge Pump dan Boost Converter untuk Catu Daya Motor Induksi pada Mobil Listrik
 DC-DC Step-Up Converter Rasio Tinggi Kombinasi Charge Pump dan Boost Converter untuk Catu Daya Motor Induksi pada Mobil Listrik Agus Miftahul Husni 2209100132 Dosen Pembimbing: Prof. Ir. Mochamad Ashari,
DC-DC Step-Up Converter Rasio Tinggi Kombinasi Charge Pump dan Boost Converter untuk Catu Daya Motor Induksi pada Mobil Listrik Agus Miftahul Husni 2209100132 Dosen Pembimbing: Prof. Ir. Mochamad Ashari,
Artikel Reguler. Volume 1 Nomor 1, April 2014
 Metode Six Step Comutation pada Perancangan Rangkian Kendali Sensored Motor Brushless Direct Current Rendy Aditya Wijaya Putra 1, Eka Firmansyah 2, F Danang Wijaya 3 Abstract Brushless direct current (BLDC)
Metode Six Step Comutation pada Perancangan Rangkian Kendali Sensored Motor Brushless Direct Current Rendy Aditya Wijaya Putra 1, Eka Firmansyah 2, F Danang Wijaya 3 Abstract Brushless direct current (BLDC)
Desain dan Implementasi Self Tuning LQR Adaptif untuk Pengaturan Tegangan Generator Sinkron 3 Fasa
 Desain dan Implementasi Self Tuning LQR Adaptif untuk Pengaturan Tegangan Generator Sinkron 3 Fasa Oleh : Arif Hermawan (05-176) Dosen Pembimbing : 1. Dr.Ir.Mochammad Rameli 2. Ir. Rusdhianto Effendie
Desain dan Implementasi Self Tuning LQR Adaptif untuk Pengaturan Tegangan Generator Sinkron 3 Fasa Oleh : Arif Hermawan (05-176) Dosen Pembimbing : 1. Dr.Ir.Mochammad Rameli 2. Ir. Rusdhianto Effendie
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga Oscillating Water Column. 3.1. Gambaran Alat Alat yang
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga Oscillating Water Column. 3.1. Gambaran Alat Alat yang
PENDEKATAN BARU UNTUK SINTESIS KONVERTER DAYA
 5 PENDEKATAN BARU UNTUK 2 SINTESIS KONVERTER DAYA 2.1 Pendahuluan Beberapa teknik sintesis konverter sudah dipakai untuk mendapatkan suatu konverter baru yang memenuhi kriteria yang diinginkan [1]-[10].
5 PENDEKATAN BARU UNTUK 2 SINTESIS KONVERTER DAYA 2.1 Pendahuluan Beberapa teknik sintesis konverter sudah dipakai untuk mendapatkan suatu konverter baru yang memenuhi kriteria yang diinginkan [1]-[10].
BAB III METODE PENELITIAN. Penelitian tugas akhir dilaksanakan pada bulan Februari 2014 hingga Januari
 BAB III METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian tugas akhir dilaksanakan pada bulan Februari 2014 hingga Januari 2015. Perancangan dan pengerjaan perangkat keras (hardware) dan laporan
BAB III METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian tugas akhir dilaksanakan pada bulan Februari 2014 hingga Januari 2015. Perancangan dan pengerjaan perangkat keras (hardware) dan laporan
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 2.1. Mikrokontroller AVR Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan serta keluaran serta dapat di read dan write dengan cara khusus. Mikrokontroller
BAB 2 LANDASAN TEORI 2.1. Mikrokontroller AVR Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan serta keluaran serta dapat di read dan write dengan cara khusus. Mikrokontroller
Desain dan Implementasi Catu Daya Searah Berarus Besar Bertegangan Kecil
 Desain dan Implementasi Catu Daya Searah Berarus Besar Bertegangan Kecil Respati Noor 1) Leonardus Heru P 2) 1) Jurusan Teknik Elektro UNIKA Soegijapranata, Semarang 50234, email : reswi_83@yahoo.co.id
Desain dan Implementasi Catu Daya Searah Berarus Besar Bertegangan Kecil Respati Noor 1) Leonardus Heru P 2) 1) Jurusan Teknik Elektro UNIKA Soegijapranata, Semarang 50234, email : reswi_83@yahoo.co.id
PENGONTROLAN DC CHOPPER UNTUK PEMBEBANAN BATERAI DENGAN METODE LOGIKA FUZZY MENGGUNAKAN MIKROKONTROLER ATMEGA 128 TUGAS AKHIR
 PENGONTROLAN DC CHOPPER UNTUK PEMBEBANAN BATERAI DENGAN METODE LOGIKA FUZZY MENGGUNAKAN MIKROKONTROLER ATMEGA 128 TUGAS AKHIR Sebagai salah satu syarat untuk menyelesaikan program strata-1 pada Jurusan
PENGONTROLAN DC CHOPPER UNTUK PEMBEBANAN BATERAI DENGAN METODE LOGIKA FUZZY MENGGUNAKAN MIKROKONTROLER ATMEGA 128 TUGAS AKHIR Sebagai salah satu syarat untuk menyelesaikan program strata-1 pada Jurusan
Pemodelan Sistem Kontrol Motor DC dengan Temperatur Udara sebagai Pemicu
 Pemodelan Sistem Kontrol Motor DC dengan Temperatur Udara sebagai Pemicu Brilliant Adhi Prabowo Pusat Penelitian Informatika, LIPI brilliant@informatika.lipi.go.id Abstrak Motor dc lebih sering digunakan
Pemodelan Sistem Kontrol Motor DC dengan Temperatur Udara sebagai Pemicu Brilliant Adhi Prabowo Pusat Penelitian Informatika, LIPI brilliant@informatika.lipi.go.id Abstrak Motor dc lebih sering digunakan
PEMANFAATAN MIKROKONTROL ATMEGA 8535 SEBAGAI PENGENDALI INVERTER SATU FASA JEMBATAN PENUH TERPROGRAM ¼ λ
 PEMANFAATAN MIKROKONTROL ATMEGA 8535 SEBAGAI PENGENDALI INVERTER SATU FASA JEMBATAN PENUH TERPROGRAM ¼ λ LAPORAN TUGAS AKHIR Oleh : YUSTINUS SWIDYATMOKO 06.50.0008 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS
PEMANFAATAN MIKROKONTROL ATMEGA 8535 SEBAGAI PENGENDALI INVERTER SATU FASA JEMBATAN PENUH TERPROGRAM ¼ λ LAPORAN TUGAS AKHIR Oleh : YUSTINUS SWIDYATMOKO 06.50.0008 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS
DC-DC Step-Up Converter Rasio Tinggi Kombinasi Charge Pump dan Boost Converter untuk Catu Daya Motor Induksi pada Mobil Listrik
 JURNA TEKNIK POMITS Vol. 1, No. 1, (2013) 1-6 1 DC-DC Step-Up Converter Rasio Tinggi Kombinasi Charge Pump dan Boost Converter untuk Catu Daya Motor Induksi pada Mobil istrik A. M. Husni, M. Ashari Prof,
JURNA TEKNIK POMITS Vol. 1, No. 1, (2013) 1-6 1 DC-DC Step-Up Converter Rasio Tinggi Kombinasi Charge Pump dan Boost Converter untuk Catu Daya Motor Induksi pada Mobil istrik A. M. Husni, M. Ashari Prof,
Desain dan Implementasi Catu Daya Searah Berarus Besar Bertegangan Kecil
 Desain dan Implementasi Catu Daya Searah Berarus Besar Bertegangan Kecil Respati Noor 1) Leonardus Heru P 2) 1) Jurusan Teknik Elektro UNIKA Soegijapranata, Semarang 50234, email : reswi_83@yahoo.co.id
Desain dan Implementasi Catu Daya Searah Berarus Besar Bertegangan Kecil Respati Noor 1) Leonardus Heru P 2) 1) Jurusan Teknik Elektro UNIKA Soegijapranata, Semarang 50234, email : reswi_83@yahoo.co.id
OPERASI PWM INVERTER SEBAGAI CURRENT. INJECTOR DENGAN KENDALI dspic33fj16gs502
 OPERASI PWM INVERTER SEBAGAI CURRENT INJECTOR DENGAN KENDALI dspic33fj16gs502 TUGAS AKHIR Oleh : MICHAEL ANDRI 09.50.0021 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS KATOLIK SOEGIJAPRANATA
OPERASI PWM INVERTER SEBAGAI CURRENT INJECTOR DENGAN KENDALI dspic33fj16gs502 TUGAS AKHIR Oleh : MICHAEL ANDRI 09.50.0021 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS KATOLIK SOEGIJAPRANATA
III. METODE PENELITIAN. Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Desember 2011
 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Desember 2011 sampai dengan
III. METODE PENELITIAN A. Waktu dan Tempat Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Desember 2011 sampai dengan
Elektronika Daya dan Electrical Drives. AC & DC Driver Motor
 Elektronika Daya dan Electrical Drives AC & DC Driver Motor Driver Motor AC Tujuan : Dapat melakukan pengontrolan dan pengendalian pad motor AC : Motor induksi atau motor asinkron adalah motor arus bolak-balik
Elektronika Daya dan Electrical Drives AC & DC Driver Motor Driver Motor AC Tujuan : Dapat melakukan pengontrolan dan pengendalian pad motor AC : Motor induksi atau motor asinkron adalah motor arus bolak-balik
NASKAH PUBLIKASI KARYA ILMIAH PEMASANGAN MOTOR DC PADA SEKUTER DENGAN PENGENDALI PULSE WIDTH MODULATION
 NASKAH PUBLIKASI KARYA ILMIAH PEMASANGAN MOTOR DC PADA SEKUTER DENGAN PENGENDALI PULSE WIDTH MODULATION Diajukan Sebagai Salah Satu Syarat Menyelesaikan Program Studi S-1 Jurusan Teknik Elektro Fakultas
NASKAH PUBLIKASI KARYA ILMIAH PEMASANGAN MOTOR DC PADA SEKUTER DENGAN PENGENDALI PULSE WIDTH MODULATION Diajukan Sebagai Salah Satu Syarat Menyelesaikan Program Studi S-1 Jurusan Teknik Elektro Fakultas
BAB I PENDAHULUAN. pengontrolan sumber tegangan AC 1 fasa dengan memafaatkan sumber
 BAB I PENDAHULUAN 1.1 Latar Belakang Regulator tegangan merupakan sebuah rangkaian yang dapat melakukan pengontrolan sumber tegangan AC 1 fasa dengan memafaatkan sumber tegangan AC yang bernilai tetap
BAB I PENDAHULUAN 1.1 Latar Belakang Regulator tegangan merupakan sebuah rangkaian yang dapat melakukan pengontrolan sumber tegangan AC 1 fasa dengan memafaatkan sumber tegangan AC yang bernilai tetap
BAB I 1. BAB I PENDAHULUAN
 BAB I 1. BAB I PENDAHULUAN 1.1 Latar Belakang Kebutuhan akan konverter daya yang efisien dan berukuran kecil terus berkembang di berbagai bidang. Mulai dari charger baterai, catu daya komputer, hingga
BAB I 1. BAB I PENDAHULUAN 1.1 Latar Belakang Kebutuhan akan konverter daya yang efisien dan berukuran kecil terus berkembang di berbagai bidang. Mulai dari charger baterai, catu daya komputer, hingga
Perancangan Sistem Pengendalian Kecepatan Motor Pompa Air Tekanan Konstan
 Perancangan Sistem Pengendalian Kecepatan Motor Pompa Air Tekanan Konstan Hari Widagdo Putra¹, Ir. Wijono, M.T., Ph.D ², Dr. Rini Nur Hasanah, S.T., M.Sc.³ ¹Mahasiswa Jurusan Teknik Elektro, ² ³Dosen Jurusan
Perancangan Sistem Pengendalian Kecepatan Motor Pompa Air Tekanan Konstan Hari Widagdo Putra¹, Ir. Wijono, M.T., Ph.D ², Dr. Rini Nur Hasanah, S.T., M.Sc.³ ¹Mahasiswa Jurusan Teknik Elektro, ² ³Dosen Jurusan
Kendali Motor Induksi Tiga Fasa Tipe Volt/Hertz. Dengan Modulasi Vektor Ruang Berbasis Mikrokontrol. Atmega32
 Kendali Motor Induksi Tiga Fasa Tipe Volt/Hertz Dengan Modulasi Vektor Ruang Berbasis Mikrokontrol Atmega32 LAPORAN TUGAS AKHIR Oleh : NICOLAUS ADI NUGROHO 07.50.0002 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS
Kendali Motor Induksi Tiga Fasa Tipe Volt/Hertz Dengan Modulasi Vektor Ruang Berbasis Mikrokontrol Atmega32 LAPORAN TUGAS AKHIR Oleh : NICOLAUS ADI NUGROHO 07.50.0002 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS
BAB III PERANCANGAN DAN IMPLEMENTASI SISTEM
 BAB III PERANCANGAN DAN IMPLEMENTASI SISTEM Dalam perancangan dan implementasi sistem akan dijelaskan tentang cara kerja sistem terdapat dalam garis besar perancangan sistem dan diikuti dengan penjelasan
BAB III PERANCANGAN DAN IMPLEMENTASI SISTEM Dalam perancangan dan implementasi sistem akan dijelaskan tentang cara kerja sistem terdapat dalam garis besar perancangan sistem dan diikuti dengan penjelasan
DESAIN SENSORLESS (MINIMUM SENSOR) KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI. Toni Putra Agus Setiawan, Hari Putranto
 KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI. Toni Putra Agus Setiawan, Hari Putranto") Putra Agus S, Putranto, Desain Sensorless (Minimum Sensor) Kontrol Motor Induksi 1 Fasa Pada DESAIN SENSORLESS (MINIMUM SENSOR) KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI Toni Putra Agus Setiawan,
Putra Agus S, Putranto, Desain Sensorless (Minimum Sensor) Kontrol Motor Induksi 1 Fasa Pada DESAIN SENSORLESS (MINIMUM SENSOR) KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI Toni Putra Agus Setiawan,
DESAIN DAN IMPLEMENTASI INVERTER SATU FASA SEBAGAI SARANA ANTARMUKA SISTEM PHOTOVOLTAIC DENGAN JARINGAN LISTRIK BERBASIS dspic30f4012
 DESAIN DAN IMPLEMENTASI INVERTER SATU FASA SEBAGAI SARANA ANTARMUKA SISTEM PHOTOVOLTAIC DENGAN JARINGAN LISTRIK BERBASIS dspic30f4012 LAPORAN TUGAS AKHIR Oleh : JEFRI SETIAWAN 10.50.0024 PROGRAM STUDI
DESAIN DAN IMPLEMENTASI INVERTER SATU FASA SEBAGAI SARANA ANTARMUKA SISTEM PHOTOVOLTAIC DENGAN JARINGAN LISTRIK BERBASIS dspic30f4012 LAPORAN TUGAS AKHIR Oleh : JEFRI SETIAWAN 10.50.0024 PROGRAM STUDI
BAB III METODE PENELITIAN. Penelitian dan penulisan laporan tugas akhir dilakukan di Laboratorium
 BAB III METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian dan penulisan laporan tugas akhir dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung dan mulai dilaksanakan pada Bulan
BAB III METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian dan penulisan laporan tugas akhir dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung dan mulai dilaksanakan pada Bulan
FORMULIR RANCANGAN PERKULIAHAN PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK
 FORMULIR RANCANGAN PERKULIAHAN PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK Q No.Dokumen 061.423.4.70.00 Distribusi Tgl. Efektif Judul Mata Kuliah : Mesin Arus Bolak-Balik Semester : 6 Sks : 3 Kode : 14034
FORMULIR RANCANGAN PERKULIAHAN PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK Q No.Dokumen 061.423.4.70.00 Distribusi Tgl. Efektif Judul Mata Kuliah : Mesin Arus Bolak-Balik Semester : 6 Sks : 3 Kode : 14034
Konverter DC-DC Input Ganda Rasio Tinggi Sebagai Pencatu Motor DC Brushless Permanen Magnet Untuk Mobil Listrik
 a Jurnal Teknik POMITS Vol., No., () -7 Konverter DC-DC Input Ganda Rasio Tinggi Sebagai Pencatu Motor DC Brushless Permanen Magnet Untuk Mobil Listrik Pelix V. Bosco Purba, Heri Suryoatmojo, Mochamad
a Jurnal Teknik POMITS Vol., No., () -7 Konverter DC-DC Input Ganda Rasio Tinggi Sebagai Pencatu Motor DC Brushless Permanen Magnet Untuk Mobil Listrik Pelix V. Bosco Purba, Heri Suryoatmojo, Mochamad
Pengembangan Sistem Mekatronika Pemindah dan Penyusun Barang tanpa Sensor Berbasis Mikrokontroller AT89S51
 Pengembangan Sistem Mekatronika Pemindah dan Penyusun Barang tanpa Sensor Berbasis Mikrokontroller AT89S51 Lovely Son 1,*) dan Hendra Firmansyah 2) 1,2) Jurusan Teknik Mesin Fakultas Teknik Universitas
Pengembangan Sistem Mekatronika Pemindah dan Penyusun Barang tanpa Sensor Berbasis Mikrokontroller AT89S51 Lovely Son 1,*) dan Hendra Firmansyah 2) 1,2) Jurusan Teknik Mesin Fakultas Teknik Universitas
Penurunan Rating Tegangan pada Belitan Motor Induksi 3 Fasa dengan Metode Rewinding untuk Aplikasi Kendaraan Listrik
 Penurunan Rating Tegangan pada Belitan Motor Induksi 3 Fasa dengan Metode Rewinding untuk Aplikasi Kendaraan Listrik Muhammad Qahhar 2209 100 104 Dosen Pembimbing: Dedet Candra Riawan, ST., M.Eng., Ph.D.
Penurunan Rating Tegangan pada Belitan Motor Induksi 3 Fasa dengan Metode Rewinding untuk Aplikasi Kendaraan Listrik Muhammad Qahhar 2209 100 104 Dosen Pembimbing: Dedet Candra Riawan, ST., M.Eng., Ph.D.
BAB III PERANCANGAN SISTEM LANGKAH PERCOBAAN DAN HASIL PERCOBAAN
 BAB III PERANCANGAN SISTEM LANGKAH PERCOBAAN DAN HASIL PERCOBAAN Bab ini akan membahas mengenai perancangan sistem dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung keseluruhan
BAB III PERANCANGAN SISTEM LANGKAH PERCOBAAN DAN HASIL PERCOBAAN Bab ini akan membahas mengenai perancangan sistem dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung keseluruhan
BAB I PENDAHULUAN. digital untuk menunjang dunia teknologi industri. mengukur kecepatan kendaraan, yang merupakan perlengkapan standar setiap
 BAB I PENDAHULUAN 1.1 Latar Belakang Dijaman teknologi industri yang semakin pesat kemajuan sebuah alat pengukuran yang menujang sebuah sistem. Merancang sebuah sistem pengukuran sebuah kecepatan, jarak
BAB I PENDAHULUAN 1.1 Latar Belakang Dijaman teknologi industri yang semakin pesat kemajuan sebuah alat pengukuran yang menujang sebuah sistem. Merancang sebuah sistem pengukuran sebuah kecepatan, jarak
PWM (PULSE WIDTH MODULATION)
") KEGIATAN BELAJAR 6 PWM (PULSE WIDTH MODULATION) A. Tujuan a. Mahasiswa diharapkan dapat memahami prinsip pembangkitan sinyal PWM analog dan digital b. Mahasiswa diharapkan dapat menggambarkan perbedaan
KEGIATAN BELAJAR 6 PWM (PULSE WIDTH MODULATION) A. Tujuan a. Mahasiswa diharapkan dapat memahami prinsip pembangkitan sinyal PWM analog dan digital b. Mahasiswa diharapkan dapat menggambarkan perbedaan
RANCANG BANGUN CATU DAYA TENAGA SURYA UNTUK PERANGKAT AUDIO MOBIL
 RANCANG BANGUN CATU DAYA TENAGA SURYA UNTUK PERANGKAT AUDIO MOBIL Sutedjo ¹, Rusiana², Zuan Mariana Wulan Sari 3 1 Dosen Jurusan Teknik Elektro Industri ² Dosen Jurusan Teknik Elektro Industri 3 Mahasiswa
RANCANG BANGUN CATU DAYA TENAGA SURYA UNTUK PERANGKAT AUDIO MOBIL Sutedjo ¹, Rusiana², Zuan Mariana Wulan Sari 3 1 Dosen Jurusan Teknik Elektro Industri ² Dosen Jurusan Teknik Elektro Industri 3 Mahasiswa
MEMORI TERPROGRAM BERBASIS V/Hz UNTUK PENGENDALIAN MOTOR INDUKSI TIGA FASA
 MEMORI TERPROGRAM BERBASIS V/Hz UNTUK PENGENDALIAN MOTOR INDUKSI TIGA FASA TUGAS AKHIR OLEH : DWI SETIARKO 02.50.0092 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS KATOLIK SOEGIJAPRANATA
MEMORI TERPROGRAM BERBASIS V/Hz UNTUK PENGENDALIAN MOTOR INDUKSI TIGA FASA TUGAS AKHIR OLEH : DWI SETIARKO 02.50.0092 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS KATOLIK SOEGIJAPRANATA
menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro Oleh : ANTONIUS P. NAINGGOLAN NIM : DEPARTEMEN TEKNIK ELEKTRO
 pada Departemen Teknik Elektro Oleh : ANTONIUS P. NAINGGOLAN NIM : DEPARTEMEN TEKNIK ELEKTRO") ANALISIS KARAKTERISTIK TORSI DAN PUTARAN MOTOR INDUKSI TIGA FASA PADA KONDISI OPERASI SATU FASA DENGAN PENAMBAHAN KAPASITOR (Aplikasi pada Laboratorium Konversi Energi Listrik FT-USU) Diajukan untuk memenuhi
ANALISIS KARAKTERISTIK TORSI DAN PUTARAN MOTOR INDUKSI TIGA FASA PADA KONDISI OPERASI SATU FASA DENGAN PENAMBAHAN KAPASITOR (Aplikasi pada Laboratorium Konversi Energi Listrik FT-USU) Diajukan untuk memenuhi
BAB IV ANALISA DAN PENGUJIAN ALAT
 BAB IV ANALISA DAN PENGUJIAN ALAT 4.1. Metodologi Pengujian Alat Dengan mempelajari pokok-pokok perancangan yang sudah di buat, maka diperlukan suatu pengujian terhadap perancangan ini. Pengujian dimaksudkan
BAB IV ANALISA DAN PENGUJIAN ALAT 4.1. Metodologi Pengujian Alat Dengan mempelajari pokok-pokok perancangan yang sudah di buat, maka diperlukan suatu pengujian terhadap perancangan ini. Pengujian dimaksudkan
Desain Buck Chopper Sebagai Catu. Power LED Dengan Kendali Arus
 Desain Buck Chopper Sebagai Catu Power LED Dengan Kendali Arus LAPORAN TUGAS AKHIR Oleh : AGUSTINUS BANGKIT HENDRAWAN 12.50.0012 FAKULTAS TEKNIK PROGRAM STUDI TEKNIK ELEKTRO UNIVERSITAS KATOLIK SOEGIJAPRANATA
Desain Buck Chopper Sebagai Catu Power LED Dengan Kendali Arus LAPORAN TUGAS AKHIR Oleh : AGUSTINUS BANGKIT HENDRAWAN 12.50.0012 FAKULTAS TEKNIK PROGRAM STUDI TEKNIK ELEKTRO UNIVERSITAS KATOLIK SOEGIJAPRANATA
KENDALI MICRO STEPPING PADA MOTOR STEPPER BERBASIS MIKROKONTROLLER dspic30f4012
 KENDALI MICRO STEPPING PADA MOTOR STEPPER BERBASIS MIKROKONTROLLER dspic30f4012 TUGAS AKHIR Oleh : ELWINTA GINTING 10.50.0018 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA
KENDALI MICRO STEPPING PADA MOTOR STEPPER BERBASIS MIKROKONTROLLER dspic30f4012 TUGAS AKHIR Oleh : ELWINTA GINTING 10.50.0018 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS KATOLIK SOEGIJAPRANATA
RANCANG BANGUN INVERTER 1 FASA SINYAL PWM BERBASIS MICROCONTROLLER AT89S52 SEBAGAI PENGATUR KECEPATAN MOTOR INDUKSI 1 FASA
 RANCANG BANGUN INVERTER 1 FASA SINYAL PWM BERBASIS MICROCONTROLLER AT89S52 SEBAGAI PENGATUR KECEPATAN MOTOR INDUKSI 1 FASA LAPORAN TUGAS AKHIR Diajukan untuk Memenuhi Sebagian Persyaratan dalam Menyelesaikan
RANCANG BANGUN INVERTER 1 FASA SINYAL PWM BERBASIS MICROCONTROLLER AT89S52 SEBAGAI PENGATUR KECEPATAN MOTOR INDUKSI 1 FASA LAPORAN TUGAS AKHIR Diajukan untuk Memenuhi Sebagian Persyaratan dalam Menyelesaikan
BAB III METODOLOGI PENELITIAN
 BAB III METODOLOGI PENELITIAN 3.1 Proses alur penelitian Dalam penelitian ini ada beberapa tahap atau langkah-langkah yang peneliti lakukan mulai dari proses perancangan model hingga hasil akhir dalam
BAB III METODOLOGI PENELITIAN 3.1 Proses alur penelitian Dalam penelitian ini ada beberapa tahap atau langkah-langkah yang peneliti lakukan mulai dari proses perancangan model hingga hasil akhir dalam
BAB II TINJAUAN PUSTAKA. relevan dengan perangkat yang akan dirancang bangun yaitu trainer Variable Speed
 BAB II TINJAUAN PUSTAKA 2.1 Kajian Pustaka Dalam tugas akhir ini, penulis memaparkan empat penelitian terdahulu yang relevan dengan perangkat yang akan dirancang bangun yaitu trainer Variable Speed Drive
BAB II TINJAUAN PUSTAKA 2.1 Kajian Pustaka Dalam tugas akhir ini, penulis memaparkan empat penelitian terdahulu yang relevan dengan perangkat yang akan dirancang bangun yaitu trainer Variable Speed Drive
RANCANG BANGUN KENDALI DIGITAL MOTOR BLDC UNTUK MOBIL LISTRIK UNIVERSITAS JEMBER
 RANCANG BANGUN KENDALI DIGITAL MOTOR BLDC UNTUK MOBIL LISTRIK UNIVERSITAS JEMBER Peneliti : HAri Arbiantara 1, Andi Setiawan 2, Widjonarko 2 Teknisi Terlibat : Sugianto 2 Mahasiswa Terlibat : Bayu Sumber
RANCANG BANGUN KENDALI DIGITAL MOTOR BLDC UNTUK MOBIL LISTRIK UNIVERSITAS JEMBER Peneliti : HAri Arbiantara 1, Andi Setiawan 2, Widjonarko 2 Teknisi Terlibat : Sugianto 2 Mahasiswa Terlibat : Bayu Sumber
KATA PENGANTAR. Bandung, 9 Oktober Penulis
 KATA PENGANTAR Dengan mengucapkan rasa syukur alhamdulillah, penulis ucapkan kehadirat Allah SWT, karena berkat rahmat dan karunianya yang begitu besar penulis dapat menyelesaikan penulisan skripsi yang
KATA PENGANTAR Dengan mengucapkan rasa syukur alhamdulillah, penulis ucapkan kehadirat Allah SWT, karena berkat rahmat dan karunianya yang begitu besar penulis dapat menyelesaikan penulisan skripsi yang
KENDALI MOTOR DC. 3. Mahasiswa memahami pengontrolan arah putar dan kecepatan motor DC menggunakan
 KEGIATAN BELAJAR 7 KENDALI MOTOR DC A. Tujuan 1. Mahasiswa memahami penerapan switching dengan rangkaian H-bridge pada motor DC 2. Mahasiswa memahami pengontrolan arah dan kecepatan motor DC menggunakan
KEGIATAN BELAJAR 7 KENDALI MOTOR DC A. Tujuan 1. Mahasiswa memahami penerapan switching dengan rangkaian H-bridge pada motor DC 2. Mahasiswa memahami pengontrolan arah dan kecepatan motor DC menggunakan
BAB III PERANCANGAN PERANGKAT KERAS MOBILE-ROBOT
 BAB III PERANCANGAN PERANGKAT KERAS MOBILE-ROBOT 3.1. Perancangan Sistem Secara Umum bawah ini. Diagram blok dari sistem yang dibuat ditunjukan pada Gambar 3.1 di u(t) + e(t) c(t) r(t) Pengontrol Plant
BAB III PERANCANGAN PERANGKAT KERAS MOBILE-ROBOT 3.1. Perancangan Sistem Secara Umum bawah ini. Diagram blok dari sistem yang dibuat ditunjukan pada Gambar 3.1 di u(t) + e(t) c(t) r(t) Pengontrol Plant