oleh : Syaifullah Agus Setyo Nugroho Dosen Pembimbing : 1. Dr.Ir Achmad Affandi, DEA 2. Ir. Gatot Kusrahardjo, MT
|
|
|
- Siska Hermawan
- 6 tahun lalu
- Tontonan:
Transkripsi
1 RANCANG BANGUN SISTEM PEMANTAUAN POSISI PADA BAND ISM oleh : Syaifullah Agus Setyo Nugroho Dosen Pembimbing : 1. Dr.Ir Achmad Affandi, DEA 2. Ir. Gatot Kusrahardjo, MT
2 Latar Belakang Perkembangan teknologi nirkabel untuk komunikasi data. Implementasi teknologi nirkabel yang dibatasi oleh masalah terbatasnya spektrum, sehingga harus dipertimbangkan cara memanfaatkan spektrum secara efisien. Pemanfaatan frekuensi yang bebas lisensi dari ISM (Industrial Scientific Medical) sehingga tidak perlu mengajukan lisensi terlebih dahulu.
3 Permasalahan Merancang dan membuat sistem menggunakan mikrokontroler. Sinkronisasi antar perangkat. Menjaga kualitas data yang dikirimkan. Membuat sistem memiliki banyak client..
4 Batasan Masalah Jumlah RF Transceiver yang digunakan hanya sepasang (transmitter dan receiver) dengan frekuensi 434,025 MHz. Data yang dikirimkan adalah data suhu, tegangan, dan koordinat GPS. Banyaknya client hanya merupakan simulasi.
5 Tujuan Terciptanya sistem pemantauan yang dapat memberikan informasi suhu, tegangan dan koordinat yang ditransmisikan melalui band ISM.
6 Dasar Teori [1] Surveillance Surveillance system adalah sistem monitoring terhadap object yang dilakukan sepanjang waktu. Pengertian object disini dapat dikatakan sembarang bentuk.
7 Dasar Teori [2] Band ISM Pembebasan lisensi frekuensi untuk keperluan industri, kesehatan & ilmiah.
8 Dasar Teori [3] Tabel range frekuensi ISM Frequency Range [Hz] Center Frequency [Hz] M M M M M M M M M M M 915 M G G G G G G G G G G G 245 G
9 Dasar Teori [4] GPS (Global Positioning System) Sistem satelit navigasi dan penentuan posisi yang dimiliki dan dikelola oleh Amerika Serikat. Beberapa kemampuan GPS antara lain dapat memberikan informasi tentang posisi, kecepatan, dan waktu secara cepat, akurat, murah, dimana saja di bumi ini tanpa tergantung cuaca.
10 Dasar Teori [5] NMEA0183 Standar kalimat laporan yang dikeluarkan oleh GPS receiver. Standar NMEA memiliki banyak jenis bentuk kalimat laporan, di antaranya yang paling penting adalah koordinat lintang (latitude), bujur (longitude), ketinggian (altitude), waktu sekarang standar UTC (UTC time), dan kecepatan (speed over ground).
11 Dasar Teori [6] Contoh bahasa NMEA 0183 : $GPRMC, ,A, ,S, ,E,0.00,89.68,211200,,*25 Keterangan : Field Contoh isi Deskripsi Sentence ID $GPRMC UTC Time hhmmss.sss Status A A = Valid, V = Invalid Latitude ddmm.mmmm N/S Indicator S N = North, S = South Longitude dddmm.mmmm
12 Dasar Teori [7] Field Contoh isi Deskripsi E/W Indicator E E = East, W = West Speed over ground 0.00 Knots Course over ground 0.00 Degrees UTC Date DDMMYY Magnetic variation Degrees Checksum *25
13 Dasar Teori [8] Mikrokontroler AVR AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer).
14 Dasar Teori [9] Bahasa C Akar bahasa C adalah bahasa BCPL yang dikembangkan oleh Martin Richards pada tahun Bahasa C adalah bahasa standart, artinya suatu program yang ditulis dengan versi bahasa C tertentu akan dapat dikompilasi dengan versi bahasa C yang lain dengan sedikit modifikasi. Delphi Delphi merupakan suatu bahasa pemrograman visual dan berorientasi obyek. Struktur dan sintak bahasa pemrograman Delphi mirip dengan bahasa Pascal.
15 Blok Diagram Sistem
16 Cara Kerja Sistem Start Inisialisasi permintaan user Permintaan dikirimkan Permintaan diterima Cek parameter yang diterima 1 Y T 1 Proses Sesuai Permintaan Hasil Data Mentah Hasil dikirimkan Hasil diterima kemudian diolah Hasil Ditampilkan Stop
17 Desain Perangkat

18 Graphical User Interface
19 Hasil Percobaan LOS Dari data hasil pengujian yang telah dilakukan, sistem mulai mengalami penurunan kemampuan komunikasi saat berada pada jarak udara ±344,21 meter di koordinat 07º16'42.78",S 112º47'51.21",E dan dapat berkomunikasi kembali pada jarak udara ±363,79 meter di koordinat 07º16'43.25",S 112º47'51.62",E. Kondisi kegagalan komunikasi terjadi kembali pada jarak udara ±392,16 meter di koordinat 07º16'43.92",S 112º47'52.26",E dan dapat berkomunikasi kembali pada jarak udara ±414,83 meter di koordinat 07º16'44.84",S 112º47'52.25",E. Kondisi putus-sambung tersebut menunjukkan bahwa kemampuan komunikasi yang ada pada RF Transceiver mengalami penurunan kualitas. Terputusnya komunikasi benar benar terjadi pada jarak udara ±457,05 meter di koordinat 07º16'46.56",S 112º47'52.17",E.
20 Hasil Percobaan NLOS Dari data hasil pengujian yang telah dilakukan, sistem mulai mengalami penurunan kemampuan komunikasi saat berada pada jarak udara ±241,95 meter di koordinat 07º16'40.51",S 112º47'49.04",E dan dapat berkomunikasi kembali pada jarak udara ±262,61 meter di koordinat 07º16'41.04",S 112º47'49.53",E. Kondisi kegagalan komunikasi terjadi kembali pada jarak udara ±286,27 meter di koordinat 07º16'41.60",S 112º47'50.07",E dan dapat berkomunikasi kembali pada jarak udara ±317,10,86 meter di koordinat 07º16'42.34",S 112º47'50.75",E. Kondisi putus-sambung tersebut menunjukkan bahwa kemampuan komunikasi yang ada pada RF Transceiver mengalami penurunan kualitas. Terputusnya komunikasi benar benar terjadi pada jarak udara ±390,07 meter di koordinat 07º16'44.16",S 112º47'52.29",E.
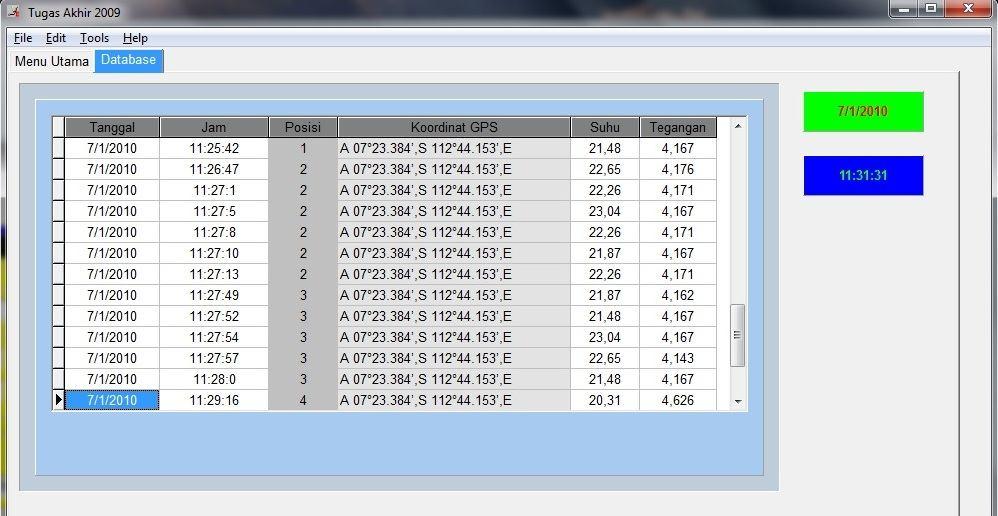
21 Laporan
22 Kesimpulan Pada kondisi Line of Sight, sistem dapat berkomunikasi pada jarak udara ±344,21 meter sampai ±457,05 meter, sehingga jarak udara maksimal agar sistem dapat berkomunikasi dengan baik adalah ±344,21 meter. Pada kondisi No Line of Sight, sistem dapat berkomunikasi pada jarak udara ±241,95 meter sampai ±390,07 meter sehingga jarak udara maksimal agar sistem dapat berkomunikasi dengan baik adalah ±241,95 meter. Perbedaan data yang dikirim dan diterima, bisa disebabkan adanya noise pada alat maupun saat data ditransmisikan.
23 Terima Kasih
24 Mikrokontroler AVR ATMega8535 Memori Flash sebesar 8 kb dengan kemampuan Read While Write. Unit interupsi internal dan eksternal. Port antarmuka Serial Peripheral Interface (SPI), Memungkinkan komunikasi sinkron berkecepatan tinggi antar mikrokontroler AVR ATMEGA8535 atau antara mikrokontroler AVR ATMEGA8535 dengan perangkat lain yang mendukung SPI. Electrically Erasable Programmable Read Only Memory (EEPROM) sebesar 512 byte yang dapat diprogram saat operasi. Antarmuka komparator analog, berguna untuk membandingkan dua buah masukan analog. Port Universal Synchronous Asynchronouns Receiver Transmitter (USART) untuk komunikasi serial.
25 Mikrokontroler AVR ATMega16 1. Advanced RISC Architecture 130 Powerful Instructions Most Single Clock Cycle Execution 32 x 8 General Purpose Fully Static Operation Up to 16 MIPS Throughput at 16 MHz On-chip 2-cycle Multiplier 2. Nonvolatile Program and Data Memories 8K Bytes of In-System Self-Programmable Flash Optional Boot Code Section with Independent Lock Bits 512 Bytes EEPROM 512 Bytes Internal SRAM Programming Lock for Software Security
26 Mikrokontroler AVR ATMega16 3. Peripheral Features Two 8-bit Timer/Counters with Separate Prescalers and Compare Mode. Two 8-bit Timer/Counters with Separate Prescalers and Compare Modes. One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and Capture Mode Real Time Counter with Separate Oscillator Four PWM Channels 8-channel, 10-bit ADC Byte-oriented Two-wire Serial Interface Programmable Serial USART
27 LM35 LM35 Merupakan IC sensor temperatur, dimana sinyal output yang dihasilkannya proporsional pada temperatur Celsius. Sensor ini tidak memerlukan kalibrasi eksternal dan secara umum dapat memberikan akurasi antara ±¼ o C sampai ±¾ o C pada suhu ruangan dan jangkauan temperatur antara -55 o C sampai dengan +150 o C. LM35 dapat digunakan dengan menggunakan power supply tunggal ataupun dengan tegangan positif dan tegangan negatif. NilaiADC Celcius = suhu max suhu max teganganper1 C 10bitADC teganganreferensi
28 Komunikasi Serial Komunikasi serial ialah pengiriman data secara serial (data dikirim satu persatu secara berurutan), sehingga komunikasi serial jauh lebih lambat daripada komunikasi paralel.
29 Perbedaan Sinkron dan Asinkron Sinkron Bentuk komunikasi data serial yang memerlukan sinyal clock untuk sinkronisasi di mana sinyal clock tersebut akan tersulut pada setiap bit pengiriman data. Asinkron Tidak memerlukan sinyal clock sebagai sinkronisasi
30 RS RS-232 (Recomended Standart-232) adalah sebuah Standard yang ditetapkan oleh Electronic Industry Association dan Telecomunication Industry Association pada tahun 1962, standard ini berfungsi untuk mengatur hal-hal yang menyangkut komunikasi data antara komputer (Data Terminal Equipment - DTE) dengan alat-alat penglengkap komputer (Data Circuit-Terminating Equipment - DCE) yang pada umumnya berbentuk komunikasi data serial.
31 UART UART adalah kependekan dari Universal Asynchronous Receiver/Transmitter yaitu sebuah chip dalam port serial yang berfungsi untuk mengubah data paralel dari PC menjadi data serial untuk pengiriman dan sebaliknya juga untuk penerimaan data.
32 Prinsip ADC Mengkonversi sinyal analog ke dalam bentuk besaran yang merupakan rasio perbandingan sinyal input dan tegangan referensi. Sebagai contoh : Bila tegangan referensi 5 volt, tegangan input 3 volt, rasio input terhadap referensi adalah 60%. Jadi, jika menggunakan ADC 8 bit dengan skala maksimum 255, akan didapatkan sinyal digital sebesar 60% x 255 = 153 (bentuk decimal) atau (bentuk biner).
33 ATMega16 / USART initialization // Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On // USART Transmitter: On // USART Mode: Asynchronous // USART Baud Rate: 9600 // ADC initialization // ADC Clock frequency: khz // ADC Voltage Reference: AREF pin // ADC Auto Trigger Source: Free Running // SPI initialization // SPI Type: Slave // SPI Clock Rate: 2764,800 khz // SPI Clock Phase: Cycle Half // SPI Clock Polarity: Low // SPI Data Order: MSB First
34 ATMega8535 // USART initialization // Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On // USART Transmitter: On // USART Mode: Asynchronous // USART Baud Rate: 4800 // SPI initialization // SPI Type: Master // SPI Clock Rate: khz // SPI Clock Phase: Cycle Half // SPI Clock Polarity: Low // SPI Data Order: MSB First
RANCANG BANGUN SISTEM PEMANTAUAN PADA BAND ISM. Syaifullah Agus Setyo Nugroho
 RANCANG BANGUN SISTEM PEMANTAUAN PADA BAND ISM Syaifullah Agus Setyo Nugroho-2206100613 Institut Teknologi Sepuluh Nopember, Fakultas Teknologi Industri, Jurusan Teknik Elektro Kampus ITS Sukolilo, Surabaya
RANCANG BANGUN SISTEM PEMANTAUAN PADA BAND ISM Syaifullah Agus Setyo Nugroho-2206100613 Institut Teknologi Sepuluh Nopember, Fakultas Teknologi Industri, Jurusan Teknik Elektro Kampus ITS Sukolilo, Surabaya
Sistem Minimum Mikrokontroler. TTH2D3 Mikroprosesor
 Sistem Minimum Mikrokontroler TTH2D3 Mikroprosesor MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang memiliki
Sistem Minimum Mikrokontroler TTH2D3 Mikroprosesor MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang memiliki
MICROCONTROLER AVR AT MEGA 8535
 MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Jenis Mikrokontroler AVR dan spesifikasinya Flash adalah suatu jenis Read Only Memory yang biasanya diisi dengan program
MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Jenis Mikrokontroler AVR dan spesifikasinya Flash adalah suatu jenis Read Only Memory yang biasanya diisi dengan program
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI II.1. Tinjauan Pustaka 1. Perancangan Telemetri Suhu dengan Modulasi Digital FSK-FM (Sukiswo,2005) Penelitian ini menjelaskan perancangan telemetri suhu dengan modulasi FSK-FM. Teknik
BAB II LANDASAN TEORI II.1. Tinjauan Pustaka 1. Perancangan Telemetri Suhu dengan Modulasi Digital FSK-FM (Sukiswo,2005) Penelitian ini menjelaskan perancangan telemetri suhu dengan modulasi FSK-FM. Teknik
MICROCONTROLER AVR AT MEGA 8535
 MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang
MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang
BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN
 BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN Konsep dasar sistem monitoring tekanan ban pada sepeda motor secara nirkabel ini terdiri dari modul sensor yang terpasang pada tutup pentil ban sepeda
BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN Konsep dasar sistem monitoring tekanan ban pada sepeda motor secara nirkabel ini terdiri dari modul sensor yang terpasang pada tutup pentil ban sepeda
BAB II KONSEP DASAR PERANCANGAN
 BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
Sebuah modem GSM mendefinisikan sebuah antarmuka yang. memungkinkan aplikasi komputer atau peralatan lain untuk mengirim dan
 19 Sebuah modem GSM mendefinisikan sebuah antarmuka yang memungkinkan aplikasi komputer atau peralatan lain untuk mengirim dan mengirim pesan melalui interface modem. Agar dapat melaksanakan tugas ini,
19 Sebuah modem GSM mendefinisikan sebuah antarmuka yang memungkinkan aplikasi komputer atau peralatan lain untuk mengirim dan mengirim pesan melalui interface modem. Agar dapat melaksanakan tugas ini,
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 2.1 Arduino Uno Arduino adalah sebuah mikrokontroler yang mudah digunakan, karena menggunakan bahasa pemrograman basic yang menggunakan bahasa C. Arduino memiliki procesor yang besar
BAB 2 LANDASAN TEORI 2.1 Arduino Uno Arduino adalah sebuah mikrokontroler yang mudah digunakan, karena menggunakan bahasa pemrograman basic yang menggunakan bahasa C. Arduino memiliki procesor yang besar
DAFTAR ISI LEMBAR PENGESAHAN... LEMBAR PERSETUJUAN... PERNYATAAN KEASLIAN... ABSTRAK... ABSTRACT... KATA PENGANTAR... vii DAFTAR ISI...
 DAFTAR ISI LEMBAR PENGESAHAN... LEMBAR PERSETUJUAN... PERNYATAAN KEASLIAN... ABSTRAK... ABSTRACT... i ii iv v vi KATA PENGANTAR... vii DAFTAR ISI... ix DAFTAR GAMBAR... xii DAFTAR TABEL... xiv DAFTAR SINGKATAN...
DAFTAR ISI LEMBAR PENGESAHAN... LEMBAR PERSETUJUAN... PERNYATAAN KEASLIAN... ABSTRAK... ABSTRACT... i ii iv v vi KATA PENGANTAR... vii DAFTAR ISI... ix DAFTAR GAMBAR... xii DAFTAR TABEL... xiv DAFTAR SINGKATAN...
BAB III LANDASAN TEORI
 BAB III LANDASAN TEORI 3.1 Arduino Uno Arduino UNO adalah board berbasis mikrokontroler pada ATmega328. Board ini memiliki 14 digital input / output pin (dimana 6 pin dapat digunakan sebagai output PWM),
BAB III LANDASAN TEORI 3.1 Arduino Uno Arduino UNO adalah board berbasis mikrokontroler pada ATmega328. Board ini memiliki 14 digital input / output pin (dimana 6 pin dapat digunakan sebagai output PWM),
Praktikum Mikrokontroler. untuk D4 Lanjut Jenjang. Disiapkan oleh: Hary Oktavianto
 Praktikum Mikrokontroler untuk D4 Lanjut Jenjang Disiapkan oleh: Hary Oktavianto Politeknik Elektronika Negeri Surabaya 2010 Aturan Praktikum Agar praktikum dapat berjalan dengan lancar dan tertib, praktikan
Praktikum Mikrokontroler untuk D4 Lanjut Jenjang Disiapkan oleh: Hary Oktavianto Politeknik Elektronika Negeri Surabaya 2010 Aturan Praktikum Agar praktikum dapat berjalan dengan lancar dan tertib, praktikan
BAB IV PEMBAHASAN. Papan Penampil Keselamatan Kerja atau Safety Board adalah sebuah
 BAB IV PEMBAHASAN 4.1 Proses Kerja Safety Board Papan Penampil Keselamatan Kerja atau Safety Board adalah sebuah papan yang digunakan untuk menampilkan data-data terkait informasi keselamatan kerja. Adapun
BAB IV PEMBAHASAN 4.1 Proses Kerja Safety Board Papan Penampil Keselamatan Kerja atau Safety Board adalah sebuah papan yang digunakan untuk menampilkan data-data terkait informasi keselamatan kerja. Adapun
BAB II LANDASAN TEORI. Dalam merancang sebuah peralatan yang cerdas, diperlukan suatu
 BAB II LANDASAN TEORI 2.1. Perangkat Keras Dalam merancang sebuah peralatan yang cerdas, diperlukan suatu perangkat keras (hardware) yang dapat mengolah data, menghitung, mengingat dan mengambil pilihan.
BAB II LANDASAN TEORI 2.1. Perangkat Keras Dalam merancang sebuah peralatan yang cerdas, diperlukan suatu perangkat keras (hardware) yang dapat mengolah data, menghitung, mengingat dan mengambil pilihan.
MENGENAL MIKROKONTROLER ATMEGA-16
 MENGENAL MIKROKONTROLER ATMEGA-16 AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus
MENGENAL MIKROKONTROLER ATMEGA-16 AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 1.1 Penelitian Terdahulu Sebagai bahan pertimbangan dalam penelitian ini akan dicantumkan beberapa hasil penelitian terdahulu : Penelitian yang dilakukan oleh Universitas Islam
BAB II TINJAUAN PUSTAKA 1.1 Penelitian Terdahulu Sebagai bahan pertimbangan dalam penelitian ini akan dicantumkan beberapa hasil penelitian terdahulu : Penelitian yang dilakukan oleh Universitas Islam
DAFTAR PUSTAKA.
 66 DAFTAR PUSTAKA http://www.scientificpsychic.com/fitness/diet-kalkulator-id.html http://www.dennysantoso.com/pengukur-lemak-tubuh-ultimategear.html http://haninmauladin.blogspot.com/2011/05/cara-menghitung-lemak-badan.html
66 DAFTAR PUSTAKA http://www.scientificpsychic.com/fitness/diet-kalkulator-id.html http://www.dennysantoso.com/pengukur-lemak-tubuh-ultimategear.html http://haninmauladin.blogspot.com/2011/05/cara-menghitung-lemak-badan.html
BAB III DESKRIPSI DAN PERANCANGAN SISTEM
 BAB III DESKRIPSI DAN PERANCANGAN SISTEM 3.1. DESKRIPSI KERJA SISTEM Gambar 3.1. Blok diagram sistem Satelit-satelit GPS akan mengirimkan sinyal-sinyal secara kontinyu setiap detiknya. GPS receiver akan
BAB III DESKRIPSI DAN PERANCANGAN SISTEM 3.1. DESKRIPSI KERJA SISTEM Gambar 3.1. Blok diagram sistem Satelit-satelit GPS akan mengirimkan sinyal-sinyal secara kontinyu setiap detiknya. GPS receiver akan
BAB II. PENJELASAN MENGENAI System-on-a-Chip (SoC) C8051F Pengenalan Mikrokontroler
 C8051F Pengenalan Mikrokontroler") BAB II PENJELASAN MENGENAI System-on-a-Chip (SoC) C8051F005 2.1 Pengenalan Mikrokontroler Mikroprosesor adalah sebuah proses komputer pada sebuah IC (Intergrated Circuit) yang di dalamnya terdapat aritmatika,
BAB II PENJELASAN MENGENAI System-on-a-Chip (SoC) C8051F005 2.1 Pengenalan Mikrokontroler Mikroprosesor adalah sebuah proses komputer pada sebuah IC (Intergrated Circuit) yang di dalamnya terdapat aritmatika,
BABII TINJAUAN PUSTAKA DAN LANDASAN TEORI
 BAB II TINJAUAN PUSTAKA DAN LANDASAN TEORI 2 2.1 Tinjauan Pustaka Adapun pembuatan modem akustik untuk komunikasi bawah air memang sudah banyak dikembangkan di universitas-universitas di Indonesia dan
BAB II TINJAUAN PUSTAKA DAN LANDASAN TEORI 2 2.1 Tinjauan Pustaka Adapun pembuatan modem akustik untuk komunikasi bawah air memang sudah banyak dikembangkan di universitas-universitas di Indonesia dan
BAB III TEORI PENUNJANG. arsitektur Reduced Instruction Set Computer (RISC). Hampir semua instruksi
. Hampir semua instruksi") BAB III TEORI PENUNJANG Pada bab tiga penulis menjelaskan tentang teori penunjang kerja praktek yang telah dikerjakan. 3.1 Mikrokontroler ATMega16 AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel,
BAB III TEORI PENUNJANG Pada bab tiga penulis menjelaskan tentang teori penunjang kerja praktek yang telah dikerjakan. 3.1 Mikrokontroler ATMega16 AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel,
BAB II DASAR TEORI. AVR(Alf and Vegard s Risc processor) ATMega32 merupakan 8 bit mikrokontroler berteknologi RISC (Reduce Instruction Set Computer).
 ATMega32 merupakan 8 bit mikrokontroler berteknologi RISC (Reduce Instruction Set Computer).") BAB II DASAR TEORI Bab ini menjelaskan konsep dan teori dasar yang mendukung perancangan dan realisasi sistem. Penjelasan ini meliputi mikrokontroler AVR, perangkat sensor, radio frequency, RTC (Real Time
BAB II DASAR TEORI Bab ini menjelaskan konsep dan teori dasar yang mendukung perancangan dan realisasi sistem. Penjelasan ini meliputi mikrokontroler AVR, perangkat sensor, radio frequency, RTC (Real Time
BAB III STUDI KOMPONEN. tugas akhir ini, termasuk fungsi beserta alasan dalam pemilihan komponen. 2. Sudah memiliki Kecepatan kerja yang cepat
 BAB III STUDI KOMPONEN Bab ini menjelaskan mengenai komponen apa saja yang digunakan dalam tugas akhir ini, termasuk fungsi beserta alasan dalam pemilihan komponen. 3.1 Mikrokontroler Perancangan sistem
BAB III STUDI KOMPONEN Bab ini menjelaskan mengenai komponen apa saja yang digunakan dalam tugas akhir ini, termasuk fungsi beserta alasan dalam pemilihan komponen. 3.1 Mikrokontroler Perancangan sistem
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
DAFTAR ISI HALAMAN JUDUL... HALAMAN PENGESAHAN P EMBIMBING... HALAMAN PENGESAHAN P ENGUJI... HALAMAN PERSEMBAHAN... HALAMAN MOTTO... KATA PENGANTAR...
 DAFTAR ISI HALAMAN JUDUL... HALAMAN PENGESAHAN P EMBIMBING... HALAMAN PENGESAHAN P ENGUJI... HALAMAN PERSEMBAHAN... HALAMAN MOTTO... KATA PENGANTAR... ABSTRAKSI... TAKARIR... DAFTAR ISI... DAFTAR TABEL...
DAFTAR ISI HALAMAN JUDUL... HALAMAN PENGESAHAN P EMBIMBING... HALAMAN PENGESAHAN P ENGUJI... HALAMAN PERSEMBAHAN... HALAMAN MOTTO... KATA PENGANTAR... ABSTRAKSI... TAKARIR... DAFTAR ISI... DAFTAR TABEL...
BAB III PERANCANGAN SISTEM. ATMega16
 BAB III PERANCANGAN SISTEM 3.1 Parancangan Sistem Blok diagram dari sistem yang dibuat pada perancangan Tugas Akhir ini terbagi menjadi 2 bagian, yaitu bagian pengirim dan bagian penerima pada komputer
BAB III PERANCANGAN SISTEM 3.1 Parancangan Sistem Blok diagram dari sistem yang dibuat pada perancangan Tugas Akhir ini terbagi menjadi 2 bagian, yaitu bagian pengirim dan bagian penerima pada komputer
MIKROKONTROLER Yoyo Somantri dan Egi Jul Kurnia
 MIKROKONTROLER Yoyo Somantri dan Egi Jul Kurnia Mikrokontroler Mikrokontroler adalah sistem komputer yang dikemas dalam sebuah IC. IC tersebut mengandung semua komponen pembentuk komputer seperti CPU,
MIKROKONTROLER Yoyo Somantri dan Egi Jul Kurnia Mikrokontroler Mikrokontroler adalah sistem komputer yang dikemas dalam sebuah IC. IC tersebut mengandung semua komponen pembentuk komputer seperti CPU,
BAB 3 PERANCANGAN SISTEM. Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat
 BAB 3 PERANCANGAN SISTEM Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat pengukur tinggi bensin pada reservoir SPBU. Dalam membuat suatu sistem harus dilakukan analisa mengenai
BAB 3 PERANCANGAN SISTEM Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat pengukur tinggi bensin pada reservoir SPBU. Dalam membuat suatu sistem harus dilakukan analisa mengenai
Sistem Mikrokontroler FE UDINUS
 Minggu ke 2 8 Maret 2013 Sistem Mikrokontroler FE UDINUS 2 Jenis jenis mikrokontroler Jenis-jenis Mikrokontroller Secara teknis, hanya ada 2 macam mikrokontroller. Pembagian ini didasarkan pada kompleksitas
Minggu ke 2 8 Maret 2013 Sistem Mikrokontroler FE UDINUS 2 Jenis jenis mikrokontroler Jenis-jenis Mikrokontroller Secara teknis, hanya ada 2 macam mikrokontroller. Pembagian ini didasarkan pada kompleksitas
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Pengertian Hidroponik Hidroponik merupakan pertanian masa depan sebab hidroponik dapat diusahakan di berbagai tempat, baik di desa, di kota maupun di lahan terbuka, atau di
BAB II TINJAUAN PUSTAKA 2.1 Pengertian Hidroponik Hidroponik merupakan pertanian masa depan sebab hidroponik dapat diusahakan di berbagai tempat, baik di desa, di kota maupun di lahan terbuka, atau di
BAB II LANDASAN TEORI. pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system.
 BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI PLC (Programable Logic Control) adalah kontroler yang dapat diprogram. PLC didesian sebagai alat kontrol dengan banyak jalur input dan output. Pengontrolan dengan menggunakan PLC
BAB II LANDASAN TEORI PLC (Programable Logic Control) adalah kontroler yang dapat diprogram. PLC didesian sebagai alat kontrol dengan banyak jalur input dan output. Pengontrolan dengan menggunakan PLC
BAB II LANDASAN TEORI. dan gambar dari komponen-komponen yang dipakai pada perancangan laporan. Skripsi. Adapun komponen-komponennya sebagai berikut :
 BAB II LANDASAN TEORI Pada bab ini, akan dijelaskan mengenai pengertian, fungsi, prinsip kerja dan gambar dari komponen-komponen yang dipakai pada perancangan laporan Skripsi. Adapun komponen-komponennya
BAB II LANDASAN TEORI Pada bab ini, akan dijelaskan mengenai pengertian, fungsi, prinsip kerja dan gambar dari komponen-komponen yang dipakai pada perancangan laporan Skripsi. Adapun komponen-komponennya
II. TINJAUAN PUSTAKA. Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR
 II. TINJAUAN PUSTAKA A. Mikrokontroler ATmega8535 Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR (Alf and Vegard s Risc Processor) yang diproduksi oleh Atmel Corporation.
II. TINJAUAN PUSTAKA A. Mikrokontroler ATmega8535 Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR (Alf and Vegard s Risc Processor) yang diproduksi oleh Atmel Corporation.
BAB II DASAR TEORI 2.1. Mikrokontroler AVR ATmega32
 BAB II DASAR TEORI Pada bab ini akan menerangkan beberapa teori dasar yang mendukung terciptanya skripsi ini. Teori-teori tersebut antara lain mikrokontroler AVR ATmega32, RTC (Real Time Clock) DS1307,
BAB II DASAR TEORI Pada bab ini akan menerangkan beberapa teori dasar yang mendukung terciptanya skripsi ini. Teori-teori tersebut antara lain mikrokontroler AVR ATmega32, RTC (Real Time Clock) DS1307,
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Landasan Teori Jurnal Telah di paparkan pada penelitian sebelumnya yang di lakukan oleh ( Jhonasri, 2011) pada Program Studi Fisika, Fakultas Matematika dan Ilmu Pengetahuan
BAB II TINJAUAN PUSTAKA 2.1 Landasan Teori Jurnal Telah di paparkan pada penelitian sebelumnya yang di lakukan oleh ( Jhonasri, 2011) pada Program Studi Fisika, Fakultas Matematika dan Ilmu Pengetahuan
TAKARIR. Akumulator Register yang digunakan untuk menyimpan semua proses aritmatika. Assembler Bahasa pemrograman mikrokontroler MCS-51
 TAKARIR Akumulator Register yang digunakan untuk menyimpan semua proses aritmatika Assembler Bahasa pemrograman mikrokontroler MCS-51 Assembly Listing Hasil dari proses assembly dalam rupa campuran dari
TAKARIR Akumulator Register yang digunakan untuk menyimpan semua proses aritmatika Assembler Bahasa pemrograman mikrokontroler MCS-51 Assembly Listing Hasil dari proses assembly dalam rupa campuran dari
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM 3.1 Diagram Blok Sistem Secara Umum Perancangan sistem yang dilakukan dengan membuat diagram blok yang menjelaskan alur dari sistem yang dibuat pada perancangan dan pembuatan
BAB III PERANCANGAN SISTEM 3.1 Diagram Blok Sistem Secara Umum Perancangan sistem yang dilakukan dengan membuat diagram blok yang menjelaskan alur dari sistem yang dibuat pada perancangan dan pembuatan
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari alat akuisisi data termokopel 8 kanal. 3.1. Gambaran Sistem Alat yang direalisasikan
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari alat akuisisi data termokopel 8 kanal. 3.1. Gambaran Sistem Alat yang direalisasikan
1. Pemograman Mikrokontroller Menggunakan BASCOM AVR. Inisialisasi baud yang digunakan.
 1. Pemograman Mikrokontroller Menggunakan BASCOM AVR $regfile = "m16def.dat" $crystal = 8000000 $baud = 9600 Inisialisasi mikrokontroller yang digunakan. Inisialisasi Kristal yang digunakan. Inisialisasi
1. Pemograman Mikrokontroller Menggunakan BASCOM AVR $regfile = "m16def.dat" $crystal = 8000000 $baud = 9600 Inisialisasi mikrokontroller yang digunakan. Inisialisasi Kristal yang digunakan. Inisialisasi
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM 3.1 Perancangan Sistem Dalam tugas akhir ini, penulis mencoba membuat alat yang dirancang untuk mendeteksi para pendaki gunung yang tersesat dengan menggunakan sistem pengiriman
BAB III PERANCANGAN SISTEM 3.1 Perancangan Sistem Dalam tugas akhir ini, penulis mencoba membuat alat yang dirancang untuk mendeteksi para pendaki gunung yang tersesat dengan menggunakan sistem pengiriman
BAB II DASAR TEORI. mikrokontroler yang berbasis chip ATmega328P. Arduino Uno. memiliki 14 digital pin input / output (atau biasa ditulis I/O, dimana
 BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino Uno R3 adalah papan pengembangan mikrokontroler yang berbasis chip ATmega328P. Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O,
BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino Uno R3 adalah papan pengembangan mikrokontroler yang berbasis chip ATmega328P. Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O,
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Water Flow Sensor G1/2 Water Flow Sensor ini terdiri terbuat dari plastik dimana didalamnya terdapat rotor dan sensor Hall Effect. Saat air mengalir melewati rotor, rotor akan
BAB II LANDASAN TEORI 2.1 Water Flow Sensor G1/2 Water Flow Sensor ini terdiri terbuat dari plastik dimana didalamnya terdapat rotor dan sensor Hall Effect. Saat air mengalir melewati rotor, rotor akan
BAB II LANDASAN TEORI. ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc
 BAB II LANDASAN TEORI 2.1. Mikrokontroller ATMega 8535 ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc Processor) keluarga ATMega. Mikrokontroller AVR memiliki arsitektur 8 bit, dimana
BAB II LANDASAN TEORI 2.1. Mikrokontroller ATMega 8535 ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc Processor) keluarga ATMega. Mikrokontroller AVR memiliki arsitektur 8 bit, dimana
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1. Analisa Permasalahan Sistem Transmisi Data Sensor Untuk Peringatan Dini Pada Kebakaran Hutan Dalam perancangan sistem transmisi data sensor untuk peringatan dini
BAB III ANALISA DAN PERANCANGAN III.1. Analisa Permasalahan Sistem Transmisi Data Sensor Untuk Peringatan Dini Pada Kebakaran Hutan Dalam perancangan sistem transmisi data sensor untuk peringatan dini
BAB IV HASIL DAN PEMBAHASAN. Setelah pembuatan modul maka perlu dilakukan pendataan melalui proses
 BAB IV HASIL DAN PEMBAHASAN 4.1 Pengujian Dan Pengukuran Setelah pembuatan modul maka perlu dilakukan pendataan melalui proses pengujian dan pengukuran. Tujuan dari pengujian dan pengukuran yaitu mengetahui
BAB IV HASIL DAN PEMBAHASAN 4.1 Pengujian Dan Pengukuran Setelah pembuatan modul maka perlu dilakukan pendataan melalui proses pengujian dan pengukuran. Tujuan dari pengujian dan pengukuran yaitu mengetahui
BAB 3 PERANCANGAN SISTEM
 BAB 3 PERANCANGAN SISTEM 3.1 Gambaran Umum Sistem Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat sistem keamanan rumah. Dalam membuat suatu sistem harus dilakukan analisa mengenai
BAB 3 PERANCANGAN SISTEM 3.1 Gambaran Umum Sistem Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat sistem keamanan rumah. Dalam membuat suatu sistem harus dilakukan analisa mengenai
BAB II LANDASAN TEORI. merealisasikan suatu alat pengawas kecepatan pada forklift berbasis mikrokontroler.
 BAB II LANDASAN TEORI Pada bab ini penulis akan membahas teori teori dasar yang digunakan untuk merealisasikan suatu alat pengawas kecepatan pada forklift berbasis mikrokontroler. 2.1 Gerak Melingkar Beraturan
BAB II LANDASAN TEORI Pada bab ini penulis akan membahas teori teori dasar yang digunakan untuk merealisasikan suatu alat pengawas kecepatan pada forklift berbasis mikrokontroler. 2.1 Gerak Melingkar Beraturan
BAB 2 LANDASAN TEORI. Dengan perkembangan terakhir, yaitu generasi AVR (Alf and Vegard s Risc
 BAB 2 LANDASAN TEORI 2.1 Mikrokontroller Dengan perkembangan terakhir, yaitu generasi AVR (Alf and Vegard s Risc processor), para desainer sistem elektronika telah diberi suatu teknologi yang memiliki
BAB 2 LANDASAN TEORI 2.1 Mikrokontroller Dengan perkembangan terakhir, yaitu generasi AVR (Alf and Vegard s Risc processor), para desainer sistem elektronika telah diberi suatu teknologi yang memiliki
RANCANG BANGUN SISTEM PENGUKURAN ARUS BERBASIS MIKROKONTROLLER ATMEGA 8535
 RANCANG BANGUN SISTEM PENGUKURAN ARUS BERBASIS MIKROKONTROLLER ATMEGA 8535 Yanuar Rohman, Anang Budikarso, Haryadi Amran D. Politeknik Elektronika Negeri Surabaya, Jurusan Teknik Telekomunikasi Laboratorium
RANCANG BANGUN SISTEM PENGUKURAN ARUS BERBASIS MIKROKONTROLLER ATMEGA 8535 Yanuar Rohman, Anang Budikarso, Haryadi Amran D. Politeknik Elektronika Negeri Surabaya, Jurusan Teknik Telekomunikasi Laboratorium
TKC210 - Teknik Interface dan Peripheral. Eko Didik Widianto
 TKC210 - Teknik Interface dan Peripheral Eko Didik Sistem Komputer - Universitas Diponegoro Review Kuliah Pembahasan tentang: Referensi: mikrokontroler (AT89S51) mikrokontroler (ATMega32A) Sumber daya
TKC210 - Teknik Interface dan Peripheral Eko Didik Sistem Komputer - Universitas Diponegoro Review Kuliah Pembahasan tentang: Referensi: mikrokontroler (AT89S51) mikrokontroler (ATMega32A) Sumber daya
BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]
![BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]](/thumbs/58/42409134.jpg "BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]") BAB II DASAR TEORI Dalam bab ini dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan skripsi yang dibuat. Teori-teori yang digunakan dalam pembuatan skripsi ini adalah sensor
BAB II DASAR TEORI Dalam bab ini dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan skripsi yang dibuat. Teori-teori yang digunakan dalam pembuatan skripsi ini adalah sensor
III. METODOLOGI PENELITIAN. Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009
 III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
BAB III RANCANG BANGUN SISTEM KARAKTERISASI LED. Rancangan sistem karakterisasi LED diperlihatkan pada blok diagram Gambar
 BAB III RANCANG BANGUN SISTEM KARAKTERISASI LED 3.1. Rancang Bangun Perangkat Keras Rancangan sistem karakterisasi LED diperlihatkan pada blok diagram Gambar 3.1. Sistem ini terdiri dari komputer, antarmuka
BAB III RANCANG BANGUN SISTEM KARAKTERISASI LED 3.1. Rancang Bangun Perangkat Keras Rancangan sistem karakterisasi LED diperlihatkan pada blok diagram Gambar 3.1. Sistem ini terdiri dari komputer, antarmuka
BAB II KONSEP DASAR SISTEM PENGONTROL PARTITUR OTOMATIS
 BAB II KONSEP DASAR SISTEM PENGONTROL PARTITUR OTOMATIS Pada BAB II ini akan dibahas gambaran cara kerja sistem dari alat yang dibuat serta komponen-komponen yang digunakan untuk pembentuk sistem. Pada
BAB II KONSEP DASAR SISTEM PENGONTROL PARTITUR OTOMATIS Pada BAB II ini akan dibahas gambaran cara kerja sistem dari alat yang dibuat serta komponen-komponen yang digunakan untuk pembentuk sistem. Pada
BAB 2 TINJAUAN TEORI
 BAB 2 TINJAUAN TEORI 2.1 Sensor Accelerometer Percepatan merupakan suatu keadaan berubahnya kecepatan terhadap waktu. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga percepatan (acceleration).
BAB 2 TINJAUAN TEORI 2.1 Sensor Accelerometer Percepatan merupakan suatu keadaan berubahnya kecepatan terhadap waktu. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga percepatan (acceleration).
SISTEM MONITORING SUHUINKUBATOR DAN BERAT BADAN PADA BAYI BERAT LAHIR RENDAH (BBLR) DI DALAM INKUBATOR BERBASIS PERSONAL COMPUTER(PC)
 DI DALAM INKUBATOR BERBASIS PERSONAL COMPUTER(PC)") SISTEM MONITORING SUHUINKUBATOR DAN BERAT BADAN PADA BAYI BERAT LAHIR RENDAH (BBLR) DI DALAM INKUBATOR BERBASIS PERSONAL COMPUTER(PC) Dida Permadani Septiningrum,Samsul Hidayatdan Heriyanto Jurusan Fisika
SISTEM MONITORING SUHUINKUBATOR DAN BERAT BADAN PADA BAYI BERAT LAHIR RENDAH (BBLR) DI DALAM INKUBATOR BERBASIS PERSONAL COMPUTER(PC) Dida Permadani Septiningrum,Samsul Hidayatdan Heriyanto Jurusan Fisika
Kereta Rel Diesel adalah unit kereta api yang terdiri dari beberapa gerbong
 BAB II KAJIAN PUSTAKA Kereta Rel Diesel adalah unit kereta api yang terdiri dari beberapa gerbong didukung oleh satu atau lebih mesin dieselon-board (terpasang). Disebut pula sebagai railcar atau railmotor,
BAB II KAJIAN PUSTAKA Kereta Rel Diesel adalah unit kereta api yang terdiri dari beberapa gerbong didukung oleh satu atau lebih mesin dieselon-board (terpasang). Disebut pula sebagai railcar atau railmotor,
PERANCANGAN DAN IMPLEMENTASI TELMETRI SUHU BERBASIS ARDUINO UNO
 PERANCANGAN DAN IMPLEMENTASI TELMETRI SUHU BERBASIS ARDUINO UNO Emil Salim (1), Kasmir Tanjung (2) Konsentrasi Teknik Komputer, Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara (USU)
PERANCANGAN DAN IMPLEMENTASI TELMETRI SUHU BERBASIS ARDUINO UNO Emil Salim (1), Kasmir Tanjung (2) Konsentrasi Teknik Komputer, Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara (USU)
BAB II TINJAUAN PUSTAKA. Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam
 BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler ATMega 8535 Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Mikrokontroler AVR ini memiliki arsitektur
BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler ATMega 8535 Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Mikrokontroler AVR ini memiliki arsitektur
4. HASIL DAN PEMBAHASAN. Data Loger. Pemasangan e-logbook dilakukan di kapal pada saat kapal sedang
 29 4. HASIL DAN PEMBAHASAN 4.1. Pemasangan Alat E-Logbook di Lapangan Pemasangan alat e-logbook dimulai dengan menyambungkan GPS Map Garmin 585 yang sudah tersambung transduser dan antena GPS dengan INOS-
29 4. HASIL DAN PEMBAHASAN 4.1. Pemasangan Alat E-Logbook di Lapangan Pemasangan alat e-logbook dimulai dengan menyambungkan GPS Map Garmin 585 yang sudah tersambung transduser dan antena GPS dengan INOS-
BAB II DASAR TEORI. 2.1 Ethanol
 BAB II DASAR TEORI 2.1 Ethanol Ethanol yang kita kenal dengan sebutan alkohol adalah hasil fermentasi dari tetes tebu. Dari proses fermentasi akan menghasilkan ethanol dengan kadar 11 12 %. Dan untuk menghasilkan
BAB II DASAR TEORI 2.1 Ethanol Ethanol yang kita kenal dengan sebutan alkohol adalah hasil fermentasi dari tetes tebu. Dari proses fermentasi akan menghasilkan ethanol dengan kadar 11 12 %. Dan untuk menghasilkan
PENGANTAR MIKROKOMPUTER PAPAN TUNGGAL (SINGLE CHIP) Oleh : Sumarna, Jurdik Fisika, FMIPA UNY
 Oleh : Sumarna, Jurdik Fisika, FMIPA UNY") PENGANTAR MIKROKOMPUTER PAPAN TUNGGAL (SINGLE CHIP) Oleh : Sumarna, Jurdik Fisika, FMIPA UNY E-mail : sumarna@uny.ac.id A. Utama Sistem Mikrokomputer Gambar berikut menunjukkan 5 (lima) unit utama dalam
PENGANTAR MIKROKOMPUTER PAPAN TUNGGAL (SINGLE CHIP) Oleh : Sumarna, Jurdik Fisika, FMIPA UNY E-mail : sumarna@uny.ac.id A. Utama Sistem Mikrokomputer Gambar berikut menunjukkan 5 (lima) unit utama dalam
BAB II DASAR TEORI. Inkubator bayi adalah alat yang digunakan untuk mempertahankan kondisi
 BAB II DASAR TEORI 2.1. Inkubator Bayi Inkubator bayi adalah alat yang digunakan untuk mempertahankan kondisi lingkungan yang cocok untuk bayi baru lahir, terutama pada kelahiran prematur. Saat ini masalah
BAB II DASAR TEORI 2.1. Inkubator Bayi Inkubator bayi adalah alat yang digunakan untuk mempertahankan kondisi lingkungan yang cocok untuk bayi baru lahir, terutama pada kelahiran prematur. Saat ini masalah
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada Bab III ini akan diuraikan mengenai perancangan perangkat keras dan perangkat lunak yang digunakan untuk membangun sistem keamanan rumah nirkabel berbasis mikrokontroler
BAB III PERANCANGAN SISTEM Pada Bab III ini akan diuraikan mengenai perancangan perangkat keras dan perangkat lunak yang digunakan untuk membangun sistem keamanan rumah nirkabel berbasis mikrokontroler
RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535
 RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535 Masriadi dan Frida Agung Rakhmadi Program Studi Fisika Fakultas Sains dan Teknologi UIN Sunan Kalijaga Jl. Marsda
RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535 Masriadi dan Frida Agung Rakhmadi Program Studi Fisika Fakultas Sains dan Teknologi UIN Sunan Kalijaga Jl. Marsda
II. TINJAUAN PUSTAKA. kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
 II. TINJAUAN PUSTAKA A. Temperatur dan Kelembaban Temperatur dan kelembaban merupakan aspek yang penting dalam menentukan kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
II. TINJAUAN PUSTAKA A. Temperatur dan Kelembaban Temperatur dan kelembaban merupakan aspek yang penting dalam menentukan kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
I. Pendahuluan. II. Tujuan. III. Gambaran Disain. MODUL 7 Monitoring Suhu dan Cahaya ke PC
 MODUL 7 Monitoring Suhu dan Cahaya ke PC I. Pendahuluan Pada praktikum ini, anda akan mencoba memanfaatkan fasilitas komunikasi serial pada mikrokontroler AVR ATmega8535. Modul praktikum sebelumnya adalah
MODUL 7 Monitoring Suhu dan Cahaya ke PC I. Pendahuluan Pada praktikum ini, anda akan mencoba memanfaatkan fasilitas komunikasi serial pada mikrokontroler AVR ATmega8535. Modul praktikum sebelumnya adalah
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi adalah suatu sistim yang di ciptakan dan dikembangkan untuk membantu atau mempermudah pekerjaan secara langsung atau pun secara tidak langsung baik kantor,
BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi adalah suatu sistim yang di ciptakan dan dikembangkan untuk membantu atau mempermudah pekerjaan secara langsung atau pun secara tidak langsung baik kantor,
BAB III LANDASAN TEORI. Kinerja tinggi, rendah daya Atmel AVR 8-bit Microcontroller Instruksi Powerfull - Kebanyakan Single-jam Siklus Eksekusi
 BAB III LANDASAN TEORI 3.1 Microcontroller ATMega32 Fitur Kinerja tinggi, rendah daya Atmel AVR 8-bit Microcontroller Advanced RISC Arsitektur - 131 Instruksi Powerfull - Kebanyakan Single-jam Siklus Eksekusi
BAB III LANDASAN TEORI 3.1 Microcontroller ATMega32 Fitur Kinerja tinggi, rendah daya Atmel AVR 8-bit Microcontroller Advanced RISC Arsitektur - 131 Instruksi Powerfull - Kebanyakan Single-jam Siklus Eksekusi
BAB II DASAR TEORI. 2.1 Sistem Pendeteksi Benturan. Sistem pendeteksi benturan saat ini khususnya dibutuhkan didalam
 BAB II DASAR TEORI 2.1 Sistem Pendeteksi Benturan Sistem pendeteksi benturan saat ini khususnya dibutuhkan didalam pengiriman barang-barang yang membutuhkan pengawasan khusus agar pengaturan awal dari
BAB II DASAR TEORI 2.1 Sistem Pendeteksi Benturan Sistem pendeteksi benturan saat ini khususnya dibutuhkan didalam pengiriman barang-barang yang membutuhkan pengawasan khusus agar pengaturan awal dari
III. METODE PENELITIAN
 III. METODE PENELITIAN 3.1. Metode Penelitian Keterangan : Nodal Sensor Router Nodal Koordinator/Gateway Gambar 3.1. Konsep jaringan ZigBee Gambar 3.1. memperlihatkan konsep jaringan ZigBee yang terdiri
III. METODE PENELITIAN 3.1. Metode Penelitian Keterangan : Nodal Sensor Router Nodal Koordinator/Gateway Gambar 3.1. Konsep jaringan ZigBee Gambar 3.1. memperlihatkan konsep jaringan ZigBee yang terdiri
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1. Sistem Minimum AVR USB Sistem minimum ATMega 8535 yang didesain sesederhana mungkin yang memudahkan dalam belajar mikrokontroller AVR tipe 8535, dilengkapi internal downloader
BAB II LANDASAN TEORI 2.1. Sistem Minimum AVR USB Sistem minimum ATMega 8535 yang didesain sesederhana mungkin yang memudahkan dalam belajar mikrokontroller AVR tipe 8535, dilengkapi internal downloader
BAB II DASAR TEORI. open-source, diturunkan dari Wiring platform, dirancang untuk. memudahkan penggunaan elektronik dalam berbagai
 BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai
BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai
BAB II DASAR TEORI. open-source, diturunkan dari Wiring platform, dirancang untuk. software arduino memiliki bahasa pemrograman C.
 BAB II DASAR TEORI 2.1 ARDUINO Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.
BAB II DASAR TEORI 2.1 ARDUINO Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.
BAB II TEORI DASAR. frekuensi 20 Hz sampai 20KHz. Lebih dari itu hanya beberapa jenis binatang yang
 5 BAB II TEORI DASAR 2.1 Sensor Ultrasonik Ultrasonik, sebutan untuk jenis suara diatas batas suara yang bisa didengar manusia. Seperti diketahui, telinga manusia hanya bisa mendengar suara dengan frekuensi
5 BAB II TEORI DASAR 2.1 Sensor Ultrasonik Ultrasonik, sebutan untuk jenis suara diatas batas suara yang bisa didengar manusia. Seperti diketahui, telinga manusia hanya bisa mendengar suara dengan frekuensi
3 SENSOR SUHU BERBASIS BAHAN FERROELEKTRIK FILM Ba 0,55 Sr 0,45 TiO 3 (BST) BERBANTUKAN MIKROKONTROLER ATMEGA8535. Pendahuluan
 BERBANTUKAN MIKROKONTROLER ATMEGA8535. Pendahuluan") 3 SENSOR SUHU BERBASIS BAHAN FERROELEKTRIK FILM Ba,55 Sr,45 TiO 3 (BST) BERBANTUKAN MIKROKONTROLER ATMEGA8535 15 Pendahuluan Material ferroelektrik memiliki kemampuan untuk mengubah arah listrik internalnya,
3 SENSOR SUHU BERBASIS BAHAN FERROELEKTRIK FILM Ba,55 Sr,45 TiO 3 (BST) BERBANTUKAN MIKROKONTROLER ATMEGA8535 15 Pendahuluan Material ferroelektrik memiliki kemampuan untuk mengubah arah listrik internalnya,
SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KOMUNIKASI DATA PADA MARITIM BUOY WEATHER UNTUK MENDUKUNG KESELAMATAN TRANSPORTASI LAUT
 SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KOMUNIKASI DATA PADA MARITIM BUOY WEATHER UNTUK MENDUKUNG KESELAMATAN TRANSPORTASI LAUT Muhammad Sa ad 2408100106 Dosen Pembimbing Ir. Syamsul Arifin, MT. LATAR BELAKANG
SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KOMUNIKASI DATA PADA MARITIM BUOY WEATHER UNTUK MENDUKUNG KESELAMATAN TRANSPORTASI LAUT Muhammad Sa ad 2408100106 Dosen Pembimbing Ir. Syamsul Arifin, MT. LATAR BELAKANG
BAB III RANCANG BANGUN
 BAB III RANCANG BANGUN 3.1 PRINSIP KERJA SISTEM Prinsip kerja sistem secara keseluruhan dimulai dari menempatkan sistem penerimaan GPS pada suatu tempat dan menunggu sampai GPS menerima data dengan baik
BAB III RANCANG BANGUN 3.1 PRINSIP KERJA SISTEM Prinsip kerja sistem secara keseluruhan dimulai dari menempatkan sistem penerimaan GPS pada suatu tempat dan menunggu sampai GPS menerima data dengan baik
8. Mengirimkan stop sequence
 I 2 C Protokol I2C merupakan singkatan dari Inter-Integrated Circuit, yang disebut dengan I-squared-C atau I-two-C. I 2 C merupakan protokol yang digunakan pada multi-master serial computer bus yang diciptakan
I 2 C Protokol I2C merupakan singkatan dari Inter-Integrated Circuit, yang disebut dengan I-squared-C atau I-two-C. I 2 C merupakan protokol yang digunakan pada multi-master serial computer bus yang diciptakan
BAB IV PENGUJIAN DAN ANALISA
 BAB IV PENGUJIAN DAN ANALISA 4. 1 UMUM Perancangan Mikrokontroler Sebagai Pemroses Data Sistem Informasi Tsunami merupakan suatu sistem yang mampu memberikan informasi secara real time posisi dari buoy
BAB IV PENGUJIAN DAN ANALISA 4. 1 UMUM Perancangan Mikrokontroler Sebagai Pemroses Data Sistem Informasi Tsunami merupakan suatu sistem yang mampu memberikan informasi secara real time posisi dari buoy
BAB III SISTEM PENGUKURAN ARUS & TEGANGAN AC PADA WATTMETER DIGITAL
 34 BAB III SISTEM PENGUKURAN ARUS & TEGANGAN AC PADA WATTMETER DIGITAL Pada bab ini akan dijelaskan mengenai rancangan desain dan cara-cara kerja dari perangkat keras atau dalam hal ini adalah wattmeter
34 BAB III SISTEM PENGUKURAN ARUS & TEGANGAN AC PADA WATTMETER DIGITAL Pada bab ini akan dijelaskan mengenai rancangan desain dan cara-cara kerja dari perangkat keras atau dalam hal ini adalah wattmeter
BAB III PERANCANGAN DAN REALISASI PERANGKAT KERAS DAN PERANGKAT LUNAK SISTEM. Dari diagram sistem dapat diuraikan metode kerja sistem secara global.
 BAB III PERANCANGAN DAN REALISASI PERANGKAT KERAS DAN PERANGKAT LUNAK SISTEM 3.1 Perancangan Perangkat Keras 3.1.1 Blok Diagram Dari diagram sistem dapat diuraikan metode kerja sistem secara global. Gambar
BAB III PERANCANGAN DAN REALISASI PERANGKAT KERAS DAN PERANGKAT LUNAK SISTEM 3.1 Perancangan Perangkat Keras 3.1.1 Blok Diagram Dari diagram sistem dapat diuraikan metode kerja sistem secara global. Gambar
TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer
 TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer disusun oleh : MERIZKY ALFAN ADHI HIDAYAT AZZA LAZUARDI JA FAR JUNAIDI 31780 31924
TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer disusun oleh : MERIZKY ALFAN ADHI HIDAYAT AZZA LAZUARDI JA FAR JUNAIDI 31780 31924
DAFTAR ISI. SAMPUL DALAM... i. PRASYARAT GELAR... ii. LEMBAR PERSETUJUAN... iii. PENETAPAN PANITIA PENGUJI... iv. SURAT PERNYATAAN BEBAS PLAGIAT...
 DAFTAR ISI Halaman SAMPUL DALAM... i PRASYARAT GELAR... ii LEMBAR PERSETUJUAN... iii PENETAPAN PANITIA PENGUJI... iv SURAT PERNYATAAN BEBAS PLAGIAT... v UCAPAN TERIMA KASIH... vi ABSTRAK... viii ABSTRACT...
DAFTAR ISI Halaman SAMPUL DALAM... i PRASYARAT GELAR... ii LEMBAR PERSETUJUAN... iii PENETAPAN PANITIA PENGUJI... iv SURAT PERNYATAAN BEBAS PLAGIAT... v UCAPAN TERIMA KASIH... vi ABSTRAK... viii ABSTRACT...
BAB 4 IMPLEMENTASI DAN EVALUASI
 BAB 4 IMPLEMENTASI DAN EVALUASI 4.1. Spesifikasi Sistem 4.1.1. Modul Mikrokontroler Pada sistem ini menggunakan Arduino Uno R3. Arduino Uno R3 adalah modul mikrokontroler yang menggunakan ATmega328, modul
BAB 4 IMPLEMENTASI DAN EVALUASI 4.1. Spesifikasi Sistem 4.1.1. Modul Mikrokontroler Pada sistem ini menggunakan Arduino Uno R3. Arduino Uno R3 adalah modul mikrokontroler yang menggunakan ATmega328, modul
BAB III PERANCANGAN SISTEM HARDWARE DAN SOFTWARE
 BAB III PERANCANGAN SISTEM HARDWARE DAN SOFTWARE 3. 1 UMUM Sistem peringatan dini tsunami merupakan sistem yang dirancang untuk memberikan informasi data terjadinya gempa yang mengarah pada prediksi adanya
BAB III PERANCANGAN SISTEM HARDWARE DAN SOFTWARE 3. 1 UMUM Sistem peringatan dini tsunami merupakan sistem yang dirancang untuk memberikan informasi data terjadinya gempa yang mengarah pada prediksi adanya
BAB II TINJAUAN PUSTAKA. yang telah membuat Data Logger Autoclave, prinsip kerja alat ini adalah pada
 4 BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Pada penelitian yang telah dilakukan oleh Dwinta Mussetyarsih (2014) yang telah membuat Data Logger Autoclave, prinsip kerja alat ini adalah pada saat
4 BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Pada penelitian yang telah dilakukan oleh Dwinta Mussetyarsih (2014) yang telah membuat Data Logger Autoclave, prinsip kerja alat ini adalah pada saat
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM 3.1 Perancangan Perangkat Keras Pada bab ini menjelaskan perangkat keras yang digunakan dalam membuat tugas akhir ini. Perangkat keras yang digunakan terdiri dari modul Arduino
BAB III PERANCANGAN SISTEM 3.1 Perancangan Perangkat Keras Pada bab ini menjelaskan perangkat keras yang digunakan dalam membuat tugas akhir ini. Perangkat keras yang digunakan terdiri dari modul Arduino
Gambar 3.1 Blok Diagram Port Serial RXD (P3.0) D SHIFT REGISTER. Clk. SBUF Receive Buffer Register (read only)
 D SHIFT REGISTER. Clk. SBUF Receive Buffer Register (read only)") 1. Operasi Serial Port mempunyai On Chip Serial Port yang dapat digunakan untuk komunikasi data serial secara Full Duplex sehingga Port Serial ini masih dapat menerima data pada saat proses pengiriman
1. Operasi Serial Port mempunyai On Chip Serial Port yang dapat digunakan untuk komunikasi data serial secara Full Duplex sehingga Port Serial ini masih dapat menerima data pada saat proses pengiriman
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1. Motor Induksi Motor induksi terdiri dari dua bagian, yaitu stator atau bagian yang diam dan rotor atau bagian yang berputar, dimana kedua bagian tersebut dipisahkan oleh suatu
BAB II LANDASAN TEORI 2.1. Motor Induksi Motor induksi terdiri dari dua bagian, yaitu stator atau bagian yang diam dan rotor atau bagian yang berputar, dimana kedua bagian tersebut dipisahkan oleh suatu
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Landasan Teori Jurnal Berdasarkan dengan laporan akhir yang telah dibuat sebelumnya oleh Nunik Tri Dahnilia ( 04105029 ) Program Studi Sistem Komputer, Fakultas Ilmu Komputer
BAB II TINJAUAN PUSTAKA 2.1 Landasan Teori Jurnal Berdasarkan dengan laporan akhir yang telah dibuat sebelumnya oleh Nunik Tri Dahnilia ( 04105029 ) Program Studi Sistem Komputer, Fakultas Ilmu Komputer
Rancangan Sistem Autofeeder Ikan pada Aquarium Berbasis Mikrokontroler ATMEGA8535
 Rancangan Sistem Autofeeder Ikan pada Aquarium Berbasis Mikrokontroler ATMEGA8535 Dedi Satria Teknik Informatika Universitas Serambi Mekkah dedisatria@serambimekkah.ac.id ABSTRAK Kajian sistem mikrokontroler
Rancangan Sistem Autofeeder Ikan pada Aquarium Berbasis Mikrokontroler ATMEGA8535 Dedi Satria Teknik Informatika Universitas Serambi Mekkah dedisatria@serambimekkah.ac.id ABSTRAK Kajian sistem mikrokontroler
BAB V PENGUJIAN SISTEM DAN ANALISIS
 BAB V PENGUJIAN SISTEM DAN ANALISIS Untuk mengetahui kelebihan dan kekurangan sistem yang dibuat, maka pada bab ini dilakukan pengujian sistem. Kemudian akan dilakukan analisis berdasarkan hasil yang diperoleh
BAB V PENGUJIAN SISTEM DAN ANALISIS Untuk mengetahui kelebihan dan kekurangan sistem yang dibuat, maka pada bab ini dilakukan pengujian sistem. Kemudian akan dilakukan analisis berdasarkan hasil yang diperoleh
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Bab ini akan membahas tentang perancangan sistem deteksi keberhasilan software QuickMark untuk mendeteksi QRCode pada objek yang bergerak di conveyor. Garis besar pengukuran
BAB III PERANCANGAN SISTEM Bab ini akan membahas tentang perancangan sistem deteksi keberhasilan software QuickMark untuk mendeteksi QRCode pada objek yang bergerak di conveyor. Garis besar pengukuran
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Timbangan Timbangan adalah alat yang dipakai melakukan pengukuran berat suatu benda. Timbangan dikategorikan kedalam sistem mekanik dan juga elektronik. Timbangan adalah suatu
BAB II LANDASAN TEORI 2.1 Timbangan Timbangan adalah alat yang dipakai melakukan pengukuran berat suatu benda. Timbangan dikategorikan kedalam sistem mekanik dan juga elektronik. Timbangan adalah suatu
BAB III RANCANG BANGUN
 BAB III RANCANG BANGUN 3.1 PRINSIP KERJA SISTEM Prinsip kerja sistem secara keseluruhan dimulai dari menempatkan sistem penerimaan GPS pada suatu tempat dan menunggu sampai GPS menerima data dengan baik
BAB III RANCANG BANGUN 3.1 PRINSIP KERJA SISTEM Prinsip kerja sistem secara keseluruhan dimulai dari menempatkan sistem penerimaan GPS pada suatu tempat dan menunggu sampai GPS menerima data dengan baik
STMIK AMIKOM YOGYAKARTA. Oleh : Nila Feby Puspitasari
 STMIK AMIKOM YOGYAKARTA Oleh : Nila Feby Puspitasari 1. Source (Sumber) - Membangkitkan data untuk ditransmisikan Contoh : telepon dan PC (Personal Computer) 2. Transmitter (Pengirim) - Mengkonversi data
STMIK AMIKOM YOGYAKARTA Oleh : Nila Feby Puspitasari 1. Source (Sumber) - Membangkitkan data untuk ditransmisikan Contoh : telepon dan PC (Personal Computer) 2. Transmitter (Pengirim) - Mengkonversi data
BAB II TINJAUAN PUSTAKA DAN LANDASAN TEORI
 BAB II TINJAUAN PUSTAKA DAN LANDASAN TEORI 2.1 Tinjauan Pustaka Pembuatan BER (Bit Error Rate) Tester dengan menggunakan mikrokontroler sudah pernah dilakukan sebelumnya. Akan tetapi Audio Tester Fiber
BAB II TINJAUAN PUSTAKA DAN LANDASAN TEORI 2.1 Tinjauan Pustaka Pembuatan BER (Bit Error Rate) Tester dengan menggunakan mikrokontroler sudah pernah dilakukan sebelumnya. Akan tetapi Audio Tester Fiber
BAB III LANDASAN TEORI. digunakan seperti MCS51 adalah pada AVR tidak perlu menggunakan oscillator
 BAB III LANDASAN TEORI 3.1 Microcontroller Atmega 8 AVR merupakan salah satu jenis mikrokontroler yang di dalamnya terdapat berbagai macam fungsi. Perbedaannya pada mikro yang pada umumnya digunakan seperti
BAB III LANDASAN TEORI 3.1 Microcontroller Atmega 8 AVR merupakan salah satu jenis mikrokontroler yang di dalamnya terdapat berbagai macam fungsi. Perbedaannya pada mikro yang pada umumnya digunakan seperti