SISTEM PENGATURAN SUHU AIR MENGGUNAKAN KENDALI PID
|
|
|
- Benny Halim
- 6 tahun lalu
- Tontonan:
Transkripsi

1 SISTEM PENGATURAN SUHU AIR MENGGUNAKAN KENDALI PID TUGAS AKHIR Oleh: OKKY JANRIZKY ANDY PANGGABEAN Disusun untuk memenuhi syarat kelulusan Program Diploma III pada Program Studi Teknik Elektronika Politeknik Batam PROGRAM STUDI TEKNIK ELEKTRONIKA POLITEKNIK BATAM BATAM 2010
2 LEMBARAN PENGESAHAN SISTEM PENGATURAN SUHU AIR MENGGUNAKAN KENDALI PID TUGAS AKHIR Oleh: OKKY JANRIZKY ANDY PANGGABEAN Diajukan dan disahkan sebagai laporan Tugas Akhir di Program Studi Teknik Elektronika Politeknik Batam Batam, July 2010 Pembimbing, Ahmad Riyad Firdaus, M.T NIK :
3 KATA PENGANTAR Puji syukur kehadirat Tuhan yang Maha Esa yang telah memberikan rahmat dan hidayahnya sehingga penulis dapat menyelesaikan laporan tugas akhir ini dengan baik. Penulisan laporan tugas akhir ini di maksudkan untuk melengkapi persyaratan kelulusan tingkat Diploma III Program Studi Teknik Elektronika Politeknik Batam. Untuk memenuhi persyaratan tersebut maka penulis mencoba untuk merancang dan membuat sistem pengaturan suhu air menggunakan kendali PID. Penulisan laporan tugas akhir ini dapat di susun dan di selesaikan dengan baik tidak lepas dari bantuan dan dukungan dari dan ikut dalam membimbing penulis untuk menyelesaikan laporan tugas akhir ini. Pada kesempatan ini, penulis ucapkan terima kasih kepada: 1. Kedua orang tua, yang memberikan didikan, dukungan dan bimbingan. 2. Bapak Dr. Priyono Eko Sanyoto, selaku Direktur Politeknik Batam. 3. Bapak Iman Fahruzi,S.T, selaku Ka.Prodi Teknik Elektro. 4. Bapak Ahmad Riyad Firdaus, M.T, selaku dosen pembimbing tugas akhir. 5. Bapak Hendawan Soebhakti, ST, selaku dosen pengampu tugas akhir. 6. Bapak Daniel Sutopo, M.T, selaku Wali kelas Teknik Elektro. 7. Seluruh Dosen atau Staf Pengajar Program studi Teknik Elektro. 8. Seluruh Teman-teman senasib seperjuangan yang selalu memberikan bantuan dan dukungan kepada penulis dalam meyelesaikan tugas akhir ini 9. Teman-teman angkatan 2007, informatika dan akuntansi. i
4 10. Seluruh Mahasiswa dan Alumni Politeknik Batam. 11. Kepada semua pihak yang secara langsung dan tidak langsung membantu penulis dalam penyusunan laporan Tugas Akhir ini. Harapan penulis semoga amal dan kebaikan yang di berikan mempunyai nilai-nilai luhur di sisi Tuhan yang Maha Esa, penulis menyadari dalam pembuatan laporan tugas akhir ini masih banyak kekurangan dan kesalahannya yang mesti di perbaiki, maka penulis mengharapkan kritik dan saran yang membangun untuk perbaikan dan pengembangan di masa-masa mendatang. Akhir kata, semoga isi dari Tugas Akhir ini bisa bermanfaat untuk kita semua. Batam, Juni 2010 Penulis ii
5 ABSTRAK Suatu pengaturan suhu air yang terpantau dibutuhkan manusia dalam macam-macam kebutuhan sehari-hari. Umumnya untuk pengaturan suhu digunakan prinsip on-off. Sistem Pengaturan dengan prinsip on-off hanya berdasarkan pada kondisi high dan low, tanpa menghiraukan kontribusi nilai errornya. Hal ini sering mengakibatkan ketidakstabilan dalam berfungsinya sistem pengaturan suhu. Oleh karena itu diperlukan pengaturan suhu yang dapat memperhitungkan kontribusi nilai errornya. Prinsip kendali yang digunakan adalah kendali PID (Propotional,Integral dan Derivatif). Sistem pengaturan suhu air ini menggunakan kendali PID dengan metode adalah trial and error dalam pemilihan konstanta pengendalinya (Kp, Ki, dan Kd ) tidak melakukan permodelan sistem, dan implementasinya secara digital. Sistem pengendali ini diterapkan pada mikrokontroller ATmega8535 dengan input dari sensor LM35. Output dari pengendali selanjutnya ditampilkan di LCD sebagai penampil dan sebagai input rangkaian pengatur tegangan. Sistem pemanas yang digunakan sebagai adalah elemen heater. Hasil pengujian sistem pengaturan ini memperlihatkan kinerja pengendali sebagai berikut : Rise time (s) : 0:18:58:17, Overhoot (%) : 4.88, Settling time (s) : 0:22:33:07, dan Steady State Error (%) : -0.23, Terlihat Rise time besar diakibatkan daya pemanas kurang besar untuk ukuran volume air yang dibuat. Kata kunci : Kendali PID, Mikrokontroler, Zero Crossing Detector, dan Solid State Relay. iii
6 DAFTAR ISI KATAPENGANTAR... i ABSTRAK... iii DAFTAR ISI... iv DAFTAR TABEL... vii DAFTAR GAMBAR... viii BAB I PENDAHULUAN Latar Belakang Tujuan dan Manfaat Metodologi Penelitian Batasan Masalah Sistematika Penulisan... 4 BAB II IKHTISAR SISTEM Deskripsi Umum Karakteristik Lingkungan Operasi dan Pengembangan BAB III LANDASAN TEORI Sistem Pengaturan Suhu Kendali PID Mikrokontroler ATmega Sensor Suhu LM IC LM Penguat Tak Membalik ( Non-inverting Amplifier ) iv
7 3.5.2 Penguat Pembalik ( Inverting Amplifier) Triac LCD (Liquid Crystal Display) Power Supply BAB IV PERANCANGAN SISTEM Perancangan Hardware Perancangan Pendeteksi Suhu Mikrokontroler Atmega Pengatur Tegangan AC Zero Crossing Detector LCD (Liquid Crystal Display) Driver Fan Perancangan Power Supply Perancangan Software Perancangan Mekanik BAB V PENGUKURAN, PENGUJIAN, DAN ANALISA SISTEM Pengukuran Pengukuran Keluaran Tegangan Power Supply Pengukuran Keluaran Sensor Suhu LM Pengukuran Keluaran Rangkaian Zero Crossing Detector Pengukuran pengontrol tegangan AC ( Rangakaian SSR) Pengukuran Rangkaian Penguat LM Pengujian Pengujian Rangkaian Mikrokontroler v
8 5.2.2 Pengujian LCD (Lquid Crystal Dispaly) Pengujian Adc Internal Pada Mikrokontroler Pengujian Rangakaian Solid State Relay dan Zero Crossing Detector Pengukuran Dan Pengujian Alat Secara Keseluruhan Analisa Sistem Analisa Sistem Kendali Analisa Rangkaian Zero Crossing Detector Analisa Rangkaian Solid State Relay Analisa Rangkaian Power Supply Analisa Rangkaian LM35 dan LM BAB VI KESIMPULAN DAN SARAN Kesimpulan Saran DAFTAR PUSTAKA LAMPIRAN vi
9 DAFTAR TABEL Tabel 3.1 Respon PID Controller Terhadap Perubahan Konstanta Tabel 3.2 Konfigurasi Pin LCD Tabel 3.3 CGROM (Character Generator ROM) Tabel 3.4 Daftar Komponen Rangkaian Op Amp Tabel 3.5 Daftar Komponen Rangkaian Solid State Relay Tabel 3.6 Daftar Komponen Rangkaian Zero Crossing Detector Tabel 3.7 Daftar Komponen Rangkaian LCD Tabel 3.8 Daftar Komponen Rangkaian Driver Fan Tabel 3.8 Daftar Komponen Rangkaian Power Supply Tabel 5.1 Hasil Pegukuran Power Supply Tabel 5.2 Pengukuran Sensor Suhu LM35 sebelum di silicon Tabel 5.3 Pegukuran Sensor Suhu LM35 setelah di silicon Tabel 5.4 Pengukuran Pengontrolan tegangan AC dari Tegangan DC Tabel 5.5 Bentuk Keluaran Sinyal di Osiloskop Tabel 5.6 Data Hasil Penguat LM Tabel 5.7 Hasil Pengujian Output Mikrokontroler Tabel 5.8 Data Pengujian Adc Internal Mikrokontroler Tabel 5.9 Data Pengukuran Dan Pengujian Alat Secara Keseluruhan Tabel 5.10 Data Pengukuran nilai konstanta kendali vii
10 DAFTAR GAMBAR Gambar 2.1 Blok Diagram Rangkaian Sistem Pengaturan Suhu Air... 6 Gambar 2.2 Flow Chart Sistem... 7 Gambar 3.1 Sistem Alat Gambar 3.2 Blok diagram untuk Unity Feedback Systems Gambar 3.3 Konfigurasi Pin ATmega Gambar 3.4 Bentuk dan simbol IC LM Gambar 3.5 Konstruksi IC LM Gambar 3.6 Rangkaian Penguat Tak Membalik Gambar 3.7 Rangkaian Penguat Pembalik Gambar 3.8 Rangkaian pengontrol gelombang penuh satu fasa Gambar 3.9 Rangkaian ekivalen triac, (b) Simbol triac Gambar 4.1 Rangkaian Penguat Operasional Gambar 4.2 Contoh Bentuk IC LM Gambar 4.3 Rangkaian Rangkaian OpAmp Gambar 4.4 Rangkaian Minimum Sistem Gambar 4.5 Rangkaian Solid State Relay Gambar 4.6 Rangkaian Zero Crossing Detector Gambar 4.7 Rangkaian LCD (Liquid Crystal Display) Gambar 4.8 Rangkaian Driver Fan Gambar 4.9 Rangkaian Power supply Gambar 4.10 Flow chart Program viii
11 Gambar 4.11 Perancangan Mekanik (1) Tampak Atas,(2) Tampak Samping Gambar 4.12 Perancangan Penempatan Heater Gambar 5.1 Pengukuran Power supply Gambar 5.2 Pengukuran Input dan Output Rangkain Zero Crossing Detector Gambar 5.3 Bentuk gelombang masukan dan keluaran Zero Crossing Detector Gambar 5.4 Pengukuran Rangkaian Solid State Relay (SSR) Gambar 5.5 Pengujian Rangkaian Adc Internal ix
12 1 BAB I PENDAHULUAN 1.1 Latar Belakang Sistem Instrumentasi yang berbentuk akuisisi data telah dipergunakan secara luas dalam kegiatan perindustrian, karena merupakan bagian dari proses kendali. Pengaturan suhu merupakan salah satu yang sering dipakai dalam suatu sistem kendali baik hanya untuk sistem monitoring saja atau untuk proses pengendalian lebih lanjut. Pada saat ini kebutuhan manusia dalam pengaturan suhu air sangat banyak, diantaranya: pengaturan suhu air akuarium, pengaturan suhu water sower, maupun pengaturan suhu air dibidang industri lainya. Untuk memenuhi kebutuhan diatas di perlukan sebuah sistem pengaturan suhu air. Dalam sistem pengatur suhu ini penulis mengambil salah satu contoh di sistem pengaturan suhu air pada water shower. Pada saat ini perangkat pengatur suhu banyak yang tidak dilengkapi perangkat monitoring suhu airnya. Sehingga para pengguna water shower sering mengira-ngira berapa suhu water shower saat ini. Akibatnya kondisi suhu air terlalu panas ataupun kurang panas. Pada tugas akhir ini, penulis mencoba membuat sistem pengaturan suhu air yang dilengkapi sitsem monitoring suhu airnya untuk mengetahui berapa suhu water sower saat ini. Sistem kontrol suhu air di set dan ditampilkan secara digital yang memanfaatkan kemampuan mikrokontroller Atmega8535 dalam akuisisi data dan mengambil keputusan. Keuntungan dari sistem ini adalah komponen rangkaian
13 2 yang banyak dipasaran yang harganya cukup terjangkau sehingga dalam membuat sistem pengaturan suhu ini biaya dapat dicapai, mudah dalam perawatan dan temperatur dapat di monitoring langsung pada layar LCD, penyetingan temperatur sesuai keinginan dengan memasukkan setpoint pada push button, kemudahan dalam pengoperasian. Sistem pengontrolan pada alat yang dirancang adalah menggunakan sistem kendali PID. Dengan sistem kendali PID ini di harapkan mengurangi ketidaksetabilan dalam perubahan suhu yang dinginkan. 1.2 Tujuan dan Manfaat Tujuan dari tugas akhir ini adalah sebagai berikut : Membuat sebuah alat pengaturan suhu air dengan menggunakan kendali PID yang terpantau.. Adapun manfaat dari tugas akhir ini adalah sebagai berikut : Memberikan kenyamanan bagi pengguna, karena dapat menentukan suhu air yang pasti. 1.3 Metodologi Penelitian Untuk menyelesaikan tugas akhir ini, dilakukan langkah-langkah sebagai berikut: 1. Studi Pusataka/literature. Studi ini dilakukan dengan cara mencari dan membaca literature serta karya-karya Pengendali Suhu Kontrol PID yang sudah di buat sebelumnya dan data-data yang berhubungan dengan alat yang akan dibuat.
14 3 2. Studi Lapangan. Studi ini dilakukan untuk memperoleh alat dan bahan yang diperlukan untuk merancang dan membuat sistem pengaturan suhu air pada sebuah wadah. 3. perancangan dan pengembangan sistem. Pada tahap ini dilakukan perancangan dan pengembangan hardware maupun software untuk sitem pengaturan suhu air. 4. Melakukan pengujian alat. Studi ini meliputi pengujian sistem yang dirancang dengan menggunakan beberapa parameter pengujian sehingga diperoleh data hasil pengujian yang selanjutnya dapat dianalisis. 5. Menyusun buku laporan tugas akhir. Hasil dari literature, Studi lapangan, perancangan dan pengembangan alat, Serta melakukan pengujian alat sistem pengaturan suhu air akan dituangkan dalam laporan tugas akhir. 1.4 Batasan Masalah Dalam tugas akhir ini permasalahan dibatasi pada hal-hal berikut: 1. Pengujian instrumen hanya dilakukan pada plant yang ditentukan. 2. Suhu yang diatur dari range 30ºC - 60ºC. 3. Sistem yang dibangun hanya melakukan pengaturan suhu. 4. Aplikasi alat yang dibuat hanya untuk proses pemanasan. 5. Sensitivitas Sensor berkurang karena pengemasan ulang sensor agar bisa diletakan di dalam air.
15 4 6. Tidak memperhitungkan efek perpindahan panas (pemerataan suhu air) yang terjadi dari sistem ke lingkungan atau sebaliknya. 7. Tidak dilakukan pemodelan sistem sehingga persamaan matematis sistem tidak diketahui. 8. Metode pengaturan yang digunakan adalah PID (Proporsional Integral Derivatif) yang diimplementasikan secara digital. 9. Metode penalaan kontrol PID yang digunakan adalah metode manual (trial and error). 1.5 Sistematika Penulisan Dalam penulisan laporan tugas akhir ini, penulis membuat sistematika penulisan yang bertujuan untuk mempermudah pembaca dalam memahami dan mempelajari isi dari laporan tugas akhir ini. Adapun sistematika penulisan laporan tugas akhir ini adalah sebagai berikut. BAB 1 : PENDAHULUAN. Bab ini berisi latar belakang, tujuan dan manfaat, metodologi penelitian, batasan masalah dan sistematika penulisan. BAB 2 : IKHTISAR SISTEM. Bab ini menjelaskan gambaran umum cara kerja sistem yang dibuat, dilengkapi dengan keterangan-keterangan (gambar, blok diagram keselurauhannya dan lain-lain) sehingga pembaca dapat memahami bagaimana cara kerja dari alat yang dibuat, karakteristik system yang di buat, baik hardware maupun software, serta lingkungan operasi dan pengembangan alat.
16 5 BAB 3 : LANDASAN TEORI. Pada Bab membahas landasan teori mengenai Sistem Pengaturan Suhu, teori Kendali PID, Mikrokontroler, ADC, sensor LM35, Penguat Operasional LM324, TRIAC, LCD, dan Power supply. BAB 4 : PERANCANGAN SISTEM. Bab ini membahas sisyem yang meliputi: 1. Perancangan Hardware : Perancangan pendeteksi suhu, Sensor LM35 & Penguatan LM324, Mikrokontroler, Solid State Relay (SSR), Zero Crossing Detector, LCD, Driver Fun dan Power Supply. 2. Perancangan Software. 3. Perancangan Mekanik. BAB 5 : PENGUKURAN, PENGUJIAN DAN ANALISA SISTEM. Bab ini berisi hasil dari pengukuran dan pengujian seperti pengukuran keluaran tegangan Power Supply, pengukuran keluaran sensor suhu LM35, pengukuran keluaran rangkaian Zero Crossing Detector, pengukuran rangakaian Solid State Relay (SSR), Pengukuran rangkaian penguat LM324, pengujian rangkaian Mikrokontroler, pengujian LCD, pengujian ADC Internal Pada Mikrokontroler, pengujian rangakain Solid State Relay dan Zero Crossing Detector, pengukuran dan pengujian alat secara keseluruhan dan analisa Sistem. BAB 6 : KESIMPULAN DAN SARAN. Bab ini berisi tentang kesimpulan yang diperoleh dari hasil analisa dan saran-saran yang memungkinkan dalam pengembangan tugas akhir in
17 6 BAB II IKHTISAR SISTEM 2.1 Deskripsi Umum Perancangan dan pembutan sistem pengaturan suhu air ini terdiri atas beberapa komponen penting yaitu Power Supply, Sensor Suhu, Tombol Set Point, Tampilan (LCD), Kendali PID yang menggunakan Mikrokontroler ATMega8535, Sinyal Zero Crossing Detector, Pengontrol Tegangan AC (SSR) dan Pemanas (Heater). Blok diagram dari rangkaian sistem alat ini adalah sebagai berikut : Gambar 2.1 Blok Diagram Rangkaian Sistem Pengaturan Suhu Air Dari blok diagram tersebut bisa kita lihat, bahwa kendali PID adalah suatu pengolahan data yang utama dalam pembuatan sistem. Dalam pembacaan sensor suhu dari sistem ini adalah LM35 yaitu sensor pendeteksi suhu yang dapat mengubah besaran suhu menjadi besaran elektrik berupa tegangan. Namun tegangan keluaran dari sensor masih berupa analog dan dalam sistem ini
18 7 menggunakan ADC internal pada mikrokontroler untuk mengubah data analog tersebut menjadi data digital. Kemudian keluaran data digital tersebut diolah mikrokontroler agar bisa diaplikasikan ke LCD. LCD akan menampilkan suhu terukur yang nantinya akan menjadi pembanding pada sistem pengendalian suhu pada alat tersebut. Gambar 2.2 Flow Chart Sistem
19 8 2.2 Karakteristik Perancangan pada sistem Sistem Penganturan Suhu Air ini memiliki beberapa karateristik perancangan mekanik dan elektornik dari sistem pengaturan sistem pengaturan suhu air ini terdiri dari: 1. Box elektronik yang berukuran panjang 35 Cm, Lebar 29 Cm, dan Tinggi 14 Cm. Sedangkan ukuran Wadah air panjang 21 Cm, Lebar 22 Cm, dan Tinggi 35 Cm dan mekanik keseluruhan sistem pengaturan suhu air ini mempunyai berat sebesar 26 Kg. 2. Heater : sebagai sumber energi panas, yang nantinya dapat diatur besar kecil panas yang dihasilkan dengan cara diberikan tegangan masukan sesuai sinyal kendali. Spesifikasi heater yaitu Daya : 500 Watt, Tegangan : 220 VAC, dan Frekuensi : 50 Hz. 3. Motor DC yang digunakan untuk Kipas pengaduk untuk Proses pemerataan sirklus suhu air. Motor Dc yang digunakan yaitu 180 Rpm. 4. Power Supply : sebagai sumber daya bagi semua komponen yang digunakan. Power Supply mempunyai input 220 Vac dan diturunkan menjadi 15 Vac menggunakan trafo step down. Dari tegangan 15 Vac di rubah menjadi catu daya sebesar 12 Vdc dan 5 Vdc menggunakan IC regulator LM7812 dam LM7805, dan power supply ini mempunyai keluaran arus mencapai 1 A. 5. Sensor LM35 adalah sensor pendeteksi suhu air datanya dikirim ke mikrokontroler yang akan digunakan sebagai umpan balik dari sistem kendali PID, kemudian ditampilkan ke LCD. Sensor LM35 ini memiliki
20 9 kemampuan pembacaan suhu dari -55ºC-150ºC, Input tegangan 4-20 Vdc dan output pembacaan suhu 10 mv/ºc. 6. Mikrokontroler Atmega8535 : digunakan sebagai unit kendali untuk mengaplikasikan kendali close loop, algoritma kendali PID. 7. Zero Crossing Detector adalah rangkaian yang digunakan untuk mendeteksi gelombang sinus tegangan jala-jala AC 220 V ketika melalui persimpangan titik nol. Rangkaian Zero Crossing Detector ini memiliki input 6 Vac dari keluaran trafo step down 220 Vac. 8. Rangkaian pengendali tegangan AC adalah rangkaian yang berfungsi untuk mengendalikan tegangan beban dengan memberi waktu tunda pemicuan TRIAC. Komponen utama pengatur tegangan AC berupa TRIAC BT 138. TRIAC BT 138 mempunyai input Max 800 Vac dan Arus sebesar 12 A. 9. LCD (liquid crystal display) berfungsi sebagai media tampilan selama proses pengendalian berlangsung.lcd yang digunakan adalah LCD 16x2 Karakter. 10. Push Button digunakan untuk memberi set point suhu yang diinginkan dan pengendali sistem kerja alat ini.push Button digunakan sebanyak 3 buah, Tombol up, Down dan Enter. 11. Lampu AC digunakan Untuk mengetahui sistem kendali berkerja. Lampu yang didigunakan adalah lampu 10 watt.
21 Lingkungan Operasi dan Pengembangan Sistem Penganturan Suhu Air ini adalah bentuk aplikasi pemanas air yang dikembangkan dengan sistem digital. Dimana proses pengaturan suhu yang diinginkan di proses dengan cara yang sederhana. Untuk kebutuhuan manuasia Sistem pengaturan suhu air ini dapat diopersikan ke aplikasi-aplikasi yang sudah ada di kehidupan sehari-hari seperti pengaturan suhu air akuarium, pengaturan suhu water sower, maupun pengaturan suhu air dibidang industri lainya. Sistem pada alat ini juga bisa dikembangkan dengan menggunakan sistem otomasi yang lebih baik dan fungsinya bukan hanya digunakan sebagai pengaturan suhu air saja, tapi mungkin bisa digunakan sebagai pengaturan suhu ruangan maupun pengaturan suhu lainnya.

22 11 BAB III LANDASAN TEORI 3.1 Sistem Pengaturan Suhu Air yang berada di dalam wadah dipanaskan menggunakan sebuah pemanas (heater) listrik. air diaduk sedemikian rupa sehingga seluruh cairan yang berada dalam wadah dapat dianggap memiliki temperatur yang sama. Gambar 3.1 Sistem Alat Dalam kasus sistem pengaturan, suhu adalah variabel yang akan atur, dan nilai suhu inilah yang diinginkan sebagai output. Kemudian input kendali adalah output dari pemanas listrik (electric heater). Besarnya kalor sebagai input kendali selalu diatur dengan mengatur tegangan yang diberikan ke pemanas. Namun telah ditunjukkan bahwa besarnya temperatur dapat diatur dengan mengatur besarnya tegangan yang diberikan ke pemanas.
23 Kendali PID Kendali PID merupakan salah satu jenis pengatur yang banyak digunakan. Selain itu sistem ini mudah digabungkan dengan metoda pengaturan yang lain seperti Fuzzy dan Robust. Sehingga akan menjadi suatu sistem pengatur yang semakin baik Tulisan ini dibatasi pada sistem dengan Unity Feedback System, yang gambarnya sebagai berikut : Gambar 3.2 Blok diagram untuk Unity Feedback Systems Kendali PID Sebenarnya terdiri dari 3 jenis cara pengaturan yang saling dikombinasikan, yaitu P (Proportional) Controller, D (Derivative) Controller, dan I (Integral) Controller. Masing-masing memiliki parameter tertentu yang harus diset untuk dapat beroperasi dengan baik, yang disebut sebagai konstanta. Setiap jenis, memiliki kelebihan dan kekurangan masing-masing, hal ini dapat dilihat pada tabel di bawah ini : Tabel 3.1 Respon PID Controller Terhadap Perubahan Konstanta Closed-Loop Response Rise Time Overshoot Settling Time Steady State Error Kp Decrease Increase Small change Decrease Ki Decrease Increase Increase Eliminate Kd Small change Decrease Decrease Small change
24 13 Paraameter-parameter tersebut, tidak bersifat berdiri sendiri, sehingga pada saat salah satu nilai konstantanya diubah, maka mungkin sistem tidak akan bereaksi seperti yang diinginkan. Tabel di atas hanya dipergunakan sebagai pedoman jika akan melakukan perubahan konstanta. Untuk merancang suatu kendali PID, biasanya dipergunakan metoda trial & error. Sehingga perancang harus mencoba kombinasi pengatur beserta konstantanya untuk mendapatkan hasil terbaik yang paling sederhana. 3.3 Mikrokontroler ATmega8535 Mikrokontroler adalah sebuah sistem yang dapat mengontrol peralatan elektronik. Sebuah mikrokontroler umumnya berisi seluruh memori dan antarmuka I/O yang dikemas dalam sebuah chip. Atmel sebagai salah satu vendor yang mengembangkan produk mikro elektronika, kini telah mengembangkan generasi AVR ( Alf and Vegard s Risc Processor ) yang merupakan suatu teknologi yang memiliki kapabilitas yang amat maju dengan biaya yang ekonomis. Mikrokontroler AVR memiliki arsitektur RISC ( Reduced Instruction Set Computing ) 8 bit yang instruksinya dikemas dalam kode 16 bit dan dieksekusi dalam satu siklus clock. Hal ini berbeda dengan seri MCS51 yang berteknologi CISC ( Complex Instruction Set Computing ) yang membutuhkan 12 siklus clock. Secara umum, AVR dapat dikelompokkan menjadi 4 kelas yaitu, keluarga ATtiny, keluarga AT90Sxx, keluarga ATMega, dan At86RFxx. Sebagai pembeda dari masing-masing kelas adalah memori, peripherial, dan fungsinya. Selain itu
25 14 dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama. Fitur yang tersedia pada ATMega 8535 adalah : a. Frekuensi clock maksimum 16 MHz. b. Jalur I/O 32 buah, yang terbagi dalam PortA, PortB, PortC dan PortD. c. Analog to Digital Converter 10 bit sebanyak 8 input. d. Timer/Counter sebanyak 3 buah. e. CPU 8 bit yang terdiri dari 32 register. f. Watchdog Timer dengan osilator internal. g. SRAM sebesar 512 byte. h. Memori Flash sebesar 8 Kbyte dengan kemampuan read while write. i. Interrupt internal maupun eksternal. j. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. k. Analog Comparator. l. Komunikasi serial USART dengan kecepatan maksimal 2,5 Mbps. Konfigurasi pin pada AVR ATmega 8535 adalah sebagai berikut : Gambar 3.3 Konfigurasi Pin ATmega 8535
26 15 Secara fungsional konfigurasi pin ATMega8535 adalah sebagai berikut : 1. VCC merupakan pin yang berfungsi sebagai pin masukan positif dari catu daya yang biasanya bernilai 5 volt DC. 2. GND merupakan pin masukan ground dari catu daya. 3. Port A ( PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC. 4. Port B ( PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus yaitu Timer/Counter, Comparator analog, dan SPI. 5. Port C ( PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog, dan Timer Oscilator. 6. Port D ( PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus yaitu comparator analog, interupsi eksternal, dan komunikasi serial. 7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. 8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal. 9. AVCC merupakan pin masukan tegangan untuk ADC. 10. AREF merupakan pin masukan tegangan referensi ADC. ATmega8535 menyediakan fasilitas ADC dengan kemampuan sebagai berikut: a. Resolusi 8 bit dan 10 bit. b. Waktu konversi µs. c. 8 jalur input single-ended. d. 7 jalur input differensial.
27 16 e. 2 jalur input differensial dengan pilihan penguatan 10x dan 200x. f. Rentang tegangan input adalah 0 sampai VCC ADC. g. Tegangan referensi dapat dipilih secara internal atau eksternal. h. Mode operasi dapat dipilih mode free running atau single conversion. i. Start konversi dengan auto trigger dari sumber-sumber interrupt. j. Dapat menghasilkan interrupt ketika konversi selesai. ATmega8535 menyediakan ADC dengan resolusi 8 bit dan 10 bit. ADC ini dihubungkan dengan 8 channel Analog Multiplexer yang memungkinkan terbentuk 8 input tegangan single-ended yaitu ADC0 s/d ADC7. Dapat juga dikonfigurasi menjadi 7 jalur input differensial dengan ADC1 sebagai terminal common negative dan yang lainnya sebagai input tegangan positif. Atau menjadi 2 jalur input differensial dengan pilihan penguatan (gain) 10x atau 200x, yaitu ADC0, ADC1, ADC2 dan ADC3. ADC memiliki pin supply tegangan analog yang terpisah yaitu AVCC. Besarnya tegangan AVCC adalah ±0.3V dari VCC. Adapun cara kerja ialah ADC mengkonversi tegangan input analog menjadi data digital 8 bit atau 10 bit. Data digital tersebut akan disimpan di dalam ADC Data Register yaitu ADCH dan ADCL. Sekali ADCL dibaca, maka akses ke data register tidak bisa dilakukan. Namun ketika ADCH dibaca, maka akses ke data register dilakukan kembali. Pada mode single conversion, proses konversi dapat dimulai dengan memberikan logika 1 pada bit ADC Start Conversion(ADSC). Bit ini akan tetap high selama proses konversi dan akan clear ketika proses konversi selesai. Pada mode auto trigger, proses konversi dapat dimulai dengan beberapa sumber trigger. Ini dilakukan dengan men-setting ADC Auto Trigger Enable bit,
28 17 ADATE pada ADCSRA. Sumber trigger dipilih dengan melakukan setting pada ADC Trigger Select bits, ADTS pada SFIOR. Tegangan referensi ADC (VREF) menentukan rentang konversi ADC. Pada mode 10 bit single ended, jika tegangan input lebih dari atau sama dengan VREF, akan menghasilkan nilai 0x3FF. Tegangan referensi ADC dapat dipilih menggunakan tegangan referensi internal maupun eksternal. Jika menggunakan tegangan referensi internal, bisa dipilih on-chip internal reference voltage yaitu sebesar 2.56V atau sebesar AVCC. Jika menggunakan tegangan referensi eksternal, dapat dihubungkan melalui pin AREF. Jika resolusi dipilih sebesar 8 bit, maka data digital akan dihasilkan pada ADCH dapat dihitung dengan persamaan sebagai berikut : ADC = VIN x 256 VREF Dimana : ADC : Data ADC, 0 s/d 255 VIN : Tegangan Input, 0 s/d AVCC VREF : Tegangan Referensi Jika resolusi dipilih sebesar 10 bit, maka data digital akan dihasilkan pada ADC dapat dihitung dengan persamaan sebagai berikut : ADC = VIN x 1024 VREF Dimana : ADC : Data ADC, 0 s/d 1024 VIN : Tegangan Input, 0 s/d AVCC VREF : Tegangan Referensi
29 Sensor Suhu LM35 Untuk mendeteksi suhu digunakan sebuah sensor suhu IC LM35, IC LM35 sebagai sensor suhu yang teliti dan terkemas dalam bentuk Integrated Circuit (IC), dimana output tegangan keluaran sangat linear tergantung dengan perubahan suhu. Sensor ini berfungsi sebagai pegubah dari besaran fisis suhu ke besaran tegangan yang memiliki koefisien sebesar 10 mv / 0 C yang berarti bahwa kenaikan suhu 1ºC maka akan terjadi kenaikan tegangan sebesar 10 mv. IC LM35 ini tidak memerlukan pengkalibrasian atau penyetelan dari luar karena ketelitiannya sampai lebih kurang seperempat derajat celcius pada temperatur. Jangka sensor mulai dari C sampai dengan C, IC LM35 penggunaannya sangat mudah, difungsikan sebagai kontrol dari indicator tampilan catu daya terbelah. IC LM35 dapat dialiri arus 60mA. Gambar 3.4 Bentuk dan simbol IC LM IC LM324 IC LM324 merupakan IC Operational Amplifier, IC ini mempunyai 4 buah op-amp yang berfungsi sebagai komparator. IC ini mempunyai tegangan kerja antara +5 V sampai +15V untuk +Vcc dan -5V sampai -15V untuk -Vcc. Adapun definisi dari masing-masing pin IC LM324 adalah sebagai berikut :
30 19 Gambar 3.5 Konstruksi IC LM Pin 1,7,8,14 (Output) Merupakan sinyal output. 2. Pin 2,6,9,13 (Inverting Input) Semua sinyal input yang berada di pin ini akan mempunyai output yang berkebalikan dari input. 3. Pin 3,5,10,12 (Non-inverting input) Semua sinyal input yang berada di pin ini akan mempunyai output yang sama dengan input (tidak berkebalikan). 4. Pin 4 (+Vcc) Pin ini dapat beroperasi pada tegangan antara +5 Volt sampai +15 Volt. 5. Pin 11 (-Vcc) Pin ini dapat beroperasi pada tegangan antara -5 Volt sampai -15 Volt Penguat Tak Membalik ( Non-inverting Amplifier ) Penguat tak membalik merupakan suatu penguat dimana tegangan input dimasukan pada terminal tak membalik (+)an mempunyai polaritas yang sama dengan tegangan masukan.
31 20 Gambar 3.6 Rangkaian Penguat Tak Membalik Besarnya penguatan dari penguat tak membalik dapat dihitung dengan menggunakan persamaan berikut ini : AV= 1+ Rf / Ri Dimana : AV = Vo / Vi Vo / Vi = 1+ Rf / Ri Penguat Pembalik ( Inverting Amplifier) Penguat pembalik merupakan suatu penguat dimana tegangan input dimasukan pada terminal membalik (-) pada OpAmp. Gambar 3.7 Rangkaian Penguat Pembalik
32 21 Besarnya penguatan dari penguat tak membalik dapat dihitung dengan menggunakan persamaan berikut ini : Av = - Rf / Rin Dimana : AV = Vo / Vi Vo / Vi = - Rf / Ri 3.6 TRIAC Pengaturan terhadap tegangan AC dapat dilakukan dengan pemotongan gelombang sinusoida. Pemotongan terhadap gelombang sinus menyebabkan nilai efektif arus berkurang sehingga tegangan AC menjadi kecil. Pemotongan gelombang sinus dapat dilakukan menggunakan thyristor. Pemotongan tegangan AC menggunakan thyristor untuk mengontrol gelombang penuh satu fasa yang menentukan kuantitas pemotongan gelombang sinusoida. Prinsip dari kontrol sudut fasa untuk gelombang penuh satu fasa dapat dilihat dari rangkaian berikut : Gambar 3.8 Rangkaian pengontrol gelombang penuh satu fasa Energi mengalir ke beban dikontrol dengan menunda sudut pemicuan thyristor T1 dan sudut pemicuan thyristor T2. Selama tegangan masukan setengah
33 22 siklus positif, daya yang mengalir dikontrol oleh beberapa sudut tunda dari thyristor T1, dan thyristor T2 mengontrol daya selama tegangan masukan setengah siklus negatif. Pulsa-pulsa yang dihasilkan pada T1 dan T2 terpisah 180º. TRIAC dapat bersifat konduktif dalam dua arah. Dalam hal ini dapat dianggap sebagai dua buah thyristor yang terhubung invers-paralel dengan koneksi gerbang seperti ditunjukkan pada Gambar 3.8. TRIAC mempunyai tiga terminal; terminal utama 2 (MT2), terminal utama 1 atau (MT1), dan gerbang (G). Gambar 3.9 menunjukan symbol TRIAC. Gambar 3.9 Rangkaian ekivalen TRIAC, (b) Simbol TRIAC Jika terminal MT2 positif terhadap MT1, TRIAC dapat di-on-kan dengan memberikan sinyal gerbang positif antara G dan MT1. Jika terminal MT2 negatif terhadap MT1 maka TRIAC dapat di-on-kan dengan memberikan sinyal pulsa negatif antara G dan MT1. Tidak perlu memiliki kedua sinyal gerbang positif dan negative dan TRIAC dapat dihidupkan baik oleh sinyal gerbang positif maupun negative.
34 LCD (Liquid Crystal Display) LCD merupakan salah satu perangkat display yang bisa menampilkan gambar atau karakter yang diinginkan. Dalam hubungannya dengan mikrokontroler, LCD dapat menampilkan kejadian dalam suatu program yang telah dimasukan ke dalam chip ketika chip tersebut dijalankan. LCD yang digunakan mempunyai lebar display 2 baris 16 kolom atau biasa disebut sebagai LCD karakter 2x16, dengan 16 pin konektor, yang didifinisikan sebagai berikut: Tabel 3.2 Konfigurasi Pin LCD Pin No. Simbol Level Keterangan 1 VSS 0V Ground 2 VDD 5V Supply tegangan untuk logika 3 VO (Variable) Tegangan operasi LCD 4 RS H/L H : Data, L : Kode instruksi 5 R/W H/L H : Baca, L : Tulis 6 E H, H --> L Chip Enable signal 7 DB0 H/L Data bit 0 8 DB1 H/L Data bit 1 9 DB2 H/L Data bit 2 10 DB3 H/L Data bit 3 11 DB4 H/L Data bit 4 12 DB5 H/L Data bit 5 13 DB6 H/L Data bit 6 14 DB7 H/L Data bit 7

35 24 15 A 4,2 4,6 V LED + 16 K 0V LED - CGROM akan menghasilkan karakter dengan format 5x8 dot atau 5x10 dot. Lihat tabel format karakter CGROM berikut ini : Tabel 3.3 CGROM (Character Generator ROM)
36 Power Supply Power supply atau catu daya memberikan supply tegangan pada rangkaian elektronik dan sistem kontrol. Catu daya mendapatkan sumber tegangan dari PLN sebesar 220 Vac. Tegangan 220 Vac ini kemudian diturunkan menjadi 12 Vac dan 5 Vac melalui trafo step down tegangan yang sudah disediakan. Tegangan AC 15 Volt disearahkan oleh dioda bridge menjadi tegangan DC. Keluaran dari dioda bridge ini kemudian masuk ke IC regulator yang fungsinya adalah untuk menstabilkan tegangan. IC regulator yang digunakan terdiri dari beberapa IC (sesuai kebutuhan) yang terdiri dari tipe LM7805 dan LM7812. Oleh karena tegangan yang diperlukan pada tiap rangkaian ada yang tidak sama, maka rangkaian catu daya ini dirancang memiliki beberapa keluaran tegangan DC yang keluarannya terdiri dari ukuran tegangan +5 Volt dan +12 Volt Ukuran tegangan tersebutlah yang akan berfungsi untuk memberikan supply tegangan. Kapasitor pada catu daya berfungsi sebagai filter atau untuk membuang noise pada tegangan DC. Pada rangkaian untuk menyearahkan tegangan digunakan dioda bridge, karena dioda bridge mempunyai tegangan ripple yang lebih baik dibandingkan dioda jenis lainnya.
37 26 BAB IV PERANCANGAN SISTEM 4.1 Perancangan Hardware Perancangan dan pembuatan system pengaturan suhu air ini mempunyai beberapa unsur penting yang mempunyai fungsi masing-masing dan saling berhubungan, sehingga dapat membuat alat ini berfungsi lebih baik. Beberapa unsur tersebut adalah Perancangan Pendeteksi Suhu, Penguat LM324, Mikrokontroler, Solid State Relay, Zero Crossing Detector, LCD, Driver Fun dan power supply Perancangan Pendeteksi Suhu Sensor suhu yang digunakan pada proyek akhir ini adalah LM35. Sensor ini merupakan komponen yang sangat peka atau sangat mudah mengalami perubahan tegangan apabila dikenai perubahan suhu. Seperti yang dijelaskan pada Bab sebelumnya tentang sensor ini, output dari sensor ini berupa tegangan analog. Namun dikarenakan output tegangan dari sensor ini kecil, maka tegangan output tersebut dikuatkan kembali menggunakan rangkaian penguat operasional lihat Gambar 4.1 agar bisa dibaca dan diolah oleh rangkaian berikutnya. Gambar 4.1 Rangkaian Penguat Operasional
38 27 Pada perancangan sistem sensor suhu, rangkaian sensor LM35 dan penguat sinyal LM324 digabung jadi satu rangkaian, karena output dari sensor LM35 langsung dilakukan penguatan oleh LM324 untuk diteruskan kerangkaian berikutnya. Sensor LM35 ini sangat peka terhadap perubahan suhu yang mengakibatkan naiknya tegangan pada output dari LM35. Ada beberapa jenis sensor IC LM35 seperti yang terlihat, lihat Gambar 4.2 di bawah ini: Gambar 4.2 Contoh Bentuk IC LM35 Adapun prinsip kerja dari sensor IC LM35 adalah : Suhu lingkungan di deteksi menggunakan bagian IC yang peka terhadap suhu Suhu lingkungan ini diubah menjadi tegangan listrik oleh rangkaian di dalam IC, dimana perubahan suhu berbanding lurus dengan perubahan tegangan output. Pada seri LM35 V out =10 mv / o C
39 28 Tiap perubahan 1 o C akan menghasilkan perubahan tegangan output sebesar 10mV Ada beberapa kelebihan dan kekurangan dari sensor IC LM35 ini adalah : Kelebihan: 1. Rentang suhu yang jauh, antara -55 sampai +150 o C 2. Beroperasi pada tegangan 4 sampai 30 V 3. Rangkaian tidak rumit 4. Tidak memerlukan pengkondisian sinyal Kekurangan: Membutuhkan sumber tegangan untuk beroperasi Output dari sensor suhu ini langsung dihubungkan dengan pengutan, penguatan yang digunakan adalah non-inverting dengan jenis IC LM324. Penguatannya sebesar 6.46 kali. Maka dapat dihitung nilai tahanan untuk penguatan non-inverting sebagai berikut : Jika nilai Ri kita tetapkan 1k5 maka nilai Rf adalah: AV= 1+ Rf / Ri Dimana : AV = Vo / Vi Vo / Vi = 1+ Rf / Ri 2.1 / = 1 + Rf / 1k = 1 + Rf / 1k = Rf / 1k = Rf / 1k5

40 29 Rf = 1k5 * 5.46 Rf = 8k19 Nilai yang mendekati nilai tahanan yang ada di pasaran adalah 8k2. Jadi nilai Ri = 1k5 dan nilai Rf = 8k2. Berikut ini rangkaian skematik penguat operasional LM 324 lihat Gambar 4.3: Gambar 4.3 Rangkaian Rangkaian Op Amp Tabel 3.4 Daftar Komponen Rangkaian Op Amp No Nama Komponen Tipe Jumlah 1 IC LM IC LM RESISTOR 8K2 1 4 RESISTOR 1K Mikrokontroler Atmega8535 Pada perancangan sistem ini piranti yang digunakan adalah mikrokontroler ATMega8535. Rangkaian mikrokontroler ini berfungsi mengolah

41 30 data yang diterima dari sensor LM35, kemudian data yang diolah diaplikasikan pada LCD dan data tersebut digunakan untuk mengontrol sistem pemanas. Pada rangkaian mikrokontroler ini terdapat empat port IC yang berfungsi sebagai input / output. Pada aplikasi ini, penempatan fungsi port adalah sebagai berikut : 1. Pada PORT A, hanya digunakan PORT A.0 yang berfungsi sebagai input dari sensor LM35. Seperti pada Gambar Pada PORT B, hanya digunakan PORT B.0 yang berfungsi sebagai output dari mikrokontroler ke Solid State Relay. Seperti pada Gambar PORT C berfungsi sebagai output tampilan ke LCD. Adapun rangkaian koneksi antara mikrokontroler dan LCD dapat dilihat pada Gambar Pada PORT D, hanya digunakan PORT D.2 berfungsi sebagai input dari Zero Crossing Detector, PORT D.3 PORTD5 berfungsi sebagai input dari Push Button, PORT D.7 berfungsi sebagai output motor DC. Gambar 4.4 Rangkaian Minimum Sistem
42 Pengatur Tegangan AC Sebagai pengatur tegangan, digunakan rangkaian Solid State Relay (SSR) yang pada prinsipnya adalah penggabungan antara rangkaian optocoupler yang menggunakan Zero Crossing Circuit di dalam MOC 3041 dan TRIAC. Gambar 4.5 menunjukkan gambar rangkaian SSR, sedangkan cara kerja rangkaian ini adalah sebagai berikut: Jika ada arus melewati MOC kaki 1 dan 2, Hal ini akan mengakibatkan dioda yang berada didalam MOC 3041 aktif dan transistor yang berada di dalam MOC 3041 juga aktif. Keadaan ini akan mengakibatkan arus dari jala-jala 220VAC mengalir ke kaki Gate TRIAC dan akan memicu TRIAC tersebut. Pemicuan ini mengakibatkan kaki MT1 dan MT2 akan terhubung dan jala-jala 220VAC akan mengalir melalui beban. Hal ini berakibat beban ON. C 10nF/500V pada rangkaian ini berfungsi untuk mengurangi arus yang sangat besar saat beban mulai ON. Jika tidak ada arus melewati MOC kaki 1 dan 2, Hal ini mengakibatkan dioda dan transistor yang berada di dalam MOC 3041 tidak aktif dan tidak akan ada pemicuan pada TRIAC sehingga beban tidak terhubung ke jala-jala 220VAC atau dengan kata lain beban OFF. Pemberian logika 0 ataupun logika 1 tersebut dikendalikan oleh mikrokontroler. Gambar 4.5 Rangkaian Solid State Relay
43 32 Tabel 3.5 Daftar Komponen Rangkaian Solid State Relay No Nama Komponen Tipe Jumlah 1 IC MOC TRIAC BT RESISTOR 470 Ohm 1 4 RESISTOR 330 Ohm 1 5 RESISTOR 5 Ohm 2 6 RESISTOR 39 Ohm 1 7 Kapasitor 10 nf Zero Crossing Detector Zero Crossing Detector seperti yang bisa dilihat pada Gambar 5.6 adalah rangkaian yang digunakan untuk mendeteksi gelombang sinus AC 220 volt saat melewati titik tegangan nol. Seberangan titik nol yang dideteksi adalah peralihan dari positif menuju negatif dan peralihan dari negatif menuju positif. Gambar 4.6 Rangkaian Zero Crossing Detector Tabel 3.6 Daftar Komponen Rangkaian Zero Crossing Detector No Nama Komponen Tipe Jumlah 1 IC 4N RESISTOR 10 K 1 3 RESISTOR 220 1

44 LCD (Liquid Crystal Display) Pada perancangan LCD ini digunakan LCD type 2x16, yang mempunyai 16 pin input/output, yang dalam aplikasi rangkaian interface-nya diperlihatkan dengan Gambar 4.7. Pada rangkaian interface LCD ini digunakan potensiometer yang berfungsi sebagai pengatur kontras layar LCD sebesar 5 K Ohm dan pada input VCC pada pin 16 diberi dioda tipe 1N4002. Gambar 4.7 Rangkaian LCD (Liquid Crystal Display) Tabel 3.7 Daftar Komponen Rangkaian LCD No Nama Komponen Tipe Jumlah 1 RESISTOR VARIABEL 5 K 1 2 DIODA 1N Driver Fan Untuk mengendalikan fan, digunakan transistor TIP122 dan relay 5-12 Volt sebagai driver. Saat alat berkerja, Mikrokontroler mengirimkan logika high ke transistor TIP122 dan kemudian mengaktifkan relay sehingga fan akan aktif.
45 34 Dan sebaliknya saat mikrokontroler mengirimkan logika low ke transistor TIP122, Relay tidak akan aktif aktif. Gambar 4.8 Rangkaian Driver Fan Tabel 3.8 Daftar Komponen Rangkaian Driver Fan No Nama Komponen Tipe Jumlah 1 TRANSISTOR TIP RESISTOR RELAY 12 V NAIS Perancangan Power Supply Rangkaian power supply ini digunakan sebagai sumber tegangan dc dari semua rangkaian. Pada rangkaian power supply ini terdapat beberapa proses. Proses pertama ialah menurunkan tegangan dari 220VAC menjadi 12VAC dan 6VAC oleh transformator step down. Proses yang kedua ialah proses menyearahkan tegangan bolak-balik (AC) menjadi tegangan searah (DC) dengan menggunakan penyearah gelombang penuh yaitu menggunakan dioda yang
46 35 dirangkaikan seperti jembatan. Proses yang ke tiga ialah proses penghalusan gelombang yang dikenal dengan istilah filter yaitu memperkecil ripple tegangan yang telah di searahkan oleh dioda sehingga mendapatkan tegangan dc yang sempurna. Setelah itu, proses yang keempat yaitu menstabilkan tegangan dc dengan menggunakan regulator 7812 untuk tegangan 12V DC dan regulator 7805 untuk tegangan 5V DC. Berikut ini adalah skematik rangakaian power supply : Gambar 4.9 Rangkaian Power supply Tabel 3.9 Daftar Komponen Rangkaian Power Supply No Nama Komponen Tipe Jumlah 1 REGULATOR LM REGULATOR LM DIODA BRIGE 1 4 RESISTOR 330 Ohm 1 5 KAPASITOR 3300 Uf 2 6 LED - 1
47 Perancangan Software Pada perancangan software alat ini memakai bahasa pemrogaman bahasa C yang digunakan untuk merancang program pada chip mikrokontroler ATMega8535. Sedangkan untuk mengkompilasi kode bahasa C ke bahasa hex, sistem ini menggunakan software Code Vision AVR.. Langkah kerja program pada alat ini intinya terletak pada sistem data input yang dipilih, tampilan pada LCD, pembacaan sensor LM35 dan pengendali PID. Berikut ini Gambar 4.10 adalah flow chart langkah kerja program yang digunakan alat ini : Gambar 4.10 Flow chart Program



 Tampak Samping 12")
48 Perancangan Mekanik Pada perancangan mekanik Sistem pengaturan suhu air ini menggunakan bahan yang terbuat dari Almunium dan kayu. Gambar 4.11 menggunakan satuan sentimeter. (1) (2) Gambar 4.11 Perancangan Mekanik (1) Tampak Atas, (2) Tampak Samping Gambar 4.12 Perancangan Penempatan Heater
49 38 Dari Gambar 4.12 dapat dilihat bentuk perancangan mekanik sistem pengaturan suhu air ini dan keterangannya sebagai berikut: 1. LM Tempat letak Wadah. 3. Push Button. 4. LCD. 5. Heater (Pemanas). 6. Kipas Pengaduk. 7. Wadah. 8. Motor DC. 9. Terminal 10. Indikator
50 39 BAB V PENGUKURAN, PENGUJIAN, DAN ANALISA SISTEM 5.1 Pengukuran Pengukuran dilakukan untuk mengetahui apakah sistem yang dibuat sesuai dengan spesifikasi alat yang telah dibuat atau tidak. Pada pengukuran sistem, penulis menggunakan peralatan ukur Multimeter Digital, Osiloskop dan Stopwatch. Metoda pengukuran yang dilakukan adalah pengukuran secara terpisah, yakni dengan cara mengukur alat perblok. Pengukuran yang dilakukan terdiri dari beberapa bagian yakni : Pengukuran Keluaran Tegangan Power Supply Pengukuran keluaran tegangan power supply dilakukan agar mengetahui seberapa stabil tegangan keluaran pada rangkaian power supply. Pada rangkaian ini dilakukan pada 2 jenis regulator pada power supply yaitu LM7812 dan LM7805. Pada Gambar 5.1 adalah setting pengukuran pada rangkaian power supply. Persentase error ( % error ) dihitung dengan persamaan sebagai berikut: % error = ( (Vteori Vpengukuran) / Vteori ) *100%
51 40 Gambar 5.1 Pengukuran Power supply Pada pengukuran diatas Penulis membanding dua hasil ukur yaitu tegangan sebelum IC Regulator LM7812 dan LM7805 yaitu di titik 1 sebelum IC Regulator LM7812 dan di titik 2 Tegangan setelah IC Regulator, Pada titik 3 dan 4 juga dilakukan pengukuran sama dengan titik 1 dan 2. Berdasarkan pengukuran yang telah dilakukan, maka di dapat hasil pengukuran seperti pada tabel berikut : Tabel 5.1 Hasil Pegukuran Power Supply No IC Regulator Input Sebelum IC Regulator Input Setelah IC Regulator 1 LM Vdc 4.92 Vdc 2 LM Vdc Vdc Untuk mendapatkan nilai persen error dari keluaran power supply adalah sebagai berikut : % error LM7805 = ( (Vteori Vpengukuran) / Vteori ) *100% = ( (5 4.92) / 5 ) * 100% = ( 0.08 / 5 ) * 100% = * 100% = 1.6%
52 41 % error LM7812 = ( (Vteori Vpengukuran) / Vteori ) *100% = ( ( ) / 12 ) * 100% = ( 0.11 / 12 ) * 100% = 0,0091 * 100% = 0.91% Pengukuran Keluaran Sensor Suhu LM35 Sensor suhu LM35 diuji dengan cara memberikan catu daya 5V dan memberikan pemanasan secara tidak langsung, sedangkan tegangan keluaran langsung diamati dengan voltmeter. Dari hasil pengukuran output sensor suhu ini didapatkan data sebagai berikut : Tabel 5.2 Pengukuran Sensor Suhu LM35 sebelum di silicon Suhu ( ºC ) Tegangan ( mv ) Suhu ( ºC ) Tegangan ( mv )
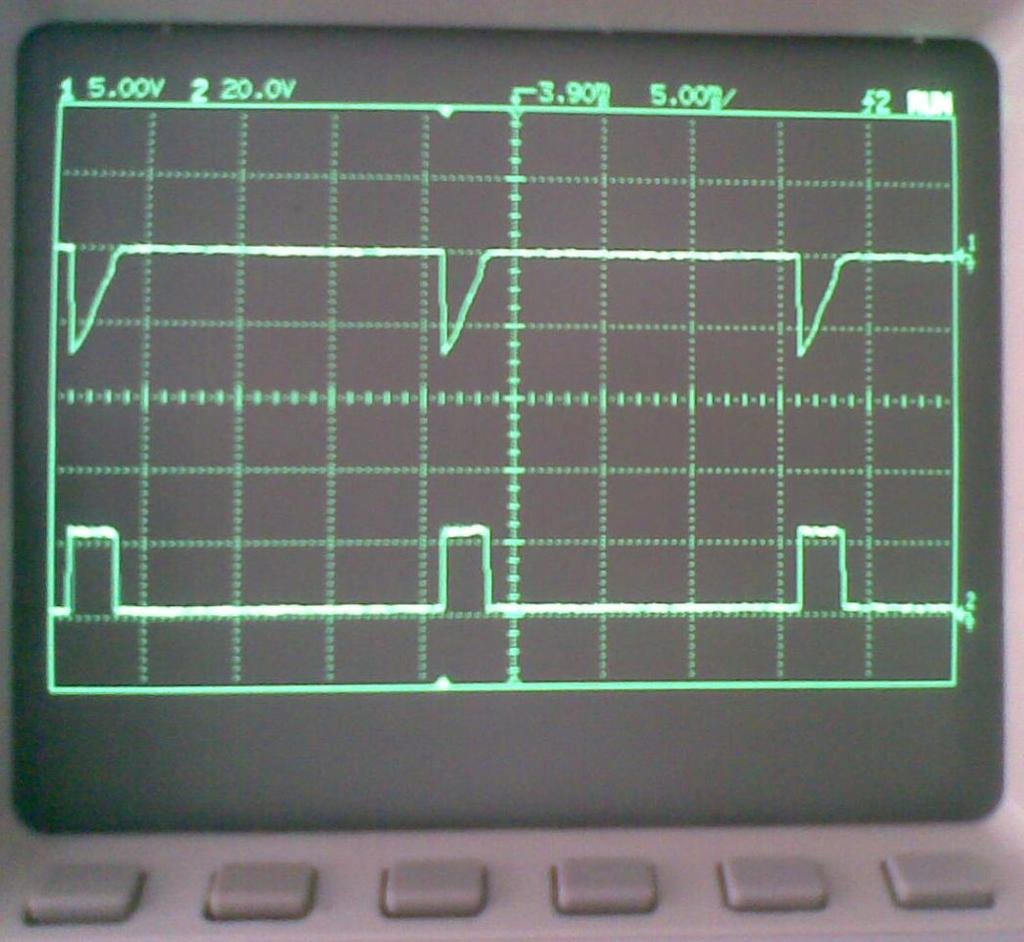
53 42 Tabel 5.3 Pegukuran Sensor Suhu LM35 setelah di silicon Suhu ( ºC ) Tegangan ( mv ) Suhu ( ºC ) Tegangan ( mv ) Dari hasil pengukuran diatas diketahui tegangan sensor naik sekitar 10mV / 0 C, maka dari itu sensor bisa dikatakan bekerja dengan baik Pengukuran Keluaran Rangkaian Zero Crossing Detector Pengukuran rangkaian Zero Crossing Detector dilakukan dengan cara memberikan input berupa tegangan AC 6 volt dari keluaran trafo step down ke rangkaian zero crossing detector. Untuk ouput sinyal diberi input tegangan DC 5 volt dan tahanan sebaesar 10 Kohm yang digunakan sebagai pull up.

54 43 Gambar 5.2 Pengukuran Input dan Output Rangkain Zero Crossing Detector Kemudian dilakukan pengukuran pada bagian masukan dan keluaran dari rangkaian Zero Crossing Detector menggunakan osiloskop. Chanel 1 adalah input dan channel 2 adalah output. Dari gambar sinyal channel 1 adalah bagian atas dan chanel 2 bagian bawah. Melalui tampilan pada osiloskop diperoleh bentuk gelombang seperti yang ditunjukkan pada Gambar 5.3. Gambar 5.3 Bentuk gelombang masukan dan keluaran Zero Crossing Detector
55 44 Dari pengukuran gmabar osiloskop dilakukan penyetingan dengan mengunakan Time/Div sebesar 10m/s, Untuk channel 1 meggunakan 5 Volt/Div sedangkan channel 2 menggunakan 1 volt/div. Adapun hasil pengukuran lain seperti sebagai berikut : 1. Pengukuran pada Channel 1 (input): - Vpp = V - Vavg = mv - Vrms = V - Frekuensi = 50 Hz - Periode = 20 ms - Duty Cycle = 50.3 % 2. Pengukuran pada Channel 2 (output): - Vpp = V - Vavg = mv - Vrms = V - Frekuensi = 50 Hz - Periode = 20 ms - Duty Cycle = 54.3 % Pengukuran pengontrol tegangan AC ( Rangakaian SSR) Pada pengukuran rangkaian Solid State Relay ini di lakukan agar dapat mengetahui perubahan tegangan ac ke beban yang dipengaruhi oleh tegangan dc yang melewati kaki 1 dan 2 MOC 3041 untuk mengaktifkan gate TRIAC.
56 45 Proses pemberian tegangan maupun arus ke gate TRIAC dipengaruhi led yang berada di dalam IC MOC 3041 yang berfungsi sama seperti sensor proximity. Gambar 5.4 Pengukuran Rangkaian Solid State Relay (SSR) Untuk rangakaian solid state relay dilakukan pengukuran di beberapa titik, pada titik 1 dari gambar dilakukan pengukuran tegangan dc yang di keluarkan dari PORTB.0. Pada tegangan tersebut digunakan untuk pengontrolan tegangan ac. Selain itu di rangkaian solid state relay ini juga dilakukan pengukuran tegangan ac yang berada di titik 2. Pengukuran pada titik 2 ini dilakukan pengukuran pada saat tegangan ac di kontrol.
57 46 Tabel 5.4 Pengukuran Pengontrolan tegangan AC dari Tegangan DC Tegangan DC (mv) Tegangan AC (V) Tegangan DC (mv) Tegangan AC ( V ) Kemudian dilakukan pengukuran pada bagian keluaran dari rangkaian solid state relay menggunakan osiloskop. Dari rangkaian telah ditunjukan titik yang di ukur. Melalui tampilan pada osiloskop diperoleh bentuk gelombang seperti yang ditunjukkan pada Tabel 5.5.




58 47 Tabel 5.5 Bentuk Keluaran Sinyal di Osiloskop Nilai Keluaran ADC Bentuk sinyal



59 48 Nilai Keluaran ADC Bentuk sinyal


60 49 Nilai Keluaran ADC Bentuk sinyal Pengukuran Rangkaian Penguat LM324 Pengujian rangkaian penguat LM324 dilakukan dengan cara memberikan input variabel pada rangkaian. Kemudian diukur menggunakan multimeter digital, dan hasil pengukuran dibandingkan dengan data sesuai dengan teori. Pengukuran rangkaian pengkondisi sinyal dilakukan dengan cara memberikan tegangan berubah-ubah pada bagian masukan penguat akhir ( penguat noninverting ) kemudian mengukur keluarannya kemudian dihitung tingkat penguatan tegangan.
61 50 Tabel 5.6 Data Hasil Penguat LM324 Vin(mV) Vout (mv) Penguatan (Av) Vout teori (mv) %error berikut: Persentase error ( % error ) dihitung dengan persamaan sebagai % Error = (Vout Vteori) x 100 % Vteori 5.2 Pengujian Pengujian dilakukan untuk mengetahui apakah perangkat yang telah dirancang dapat bekerja atau berfungsi dengan baik sebagaimana yang diinginkan.
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
Clamp-Meter Pengukur Arus AC Berbasis Mikrokontroller
 Clamp-Meter Pengukur Arus AC Berbasis Mikrokontroller Tanu Dwitama, Daniel Sutopo P. Politeknik Batam Parkway Street, Batam Centre, Batam 29461, Indonesia E-mail: tanudwitama@yahoo.co.id, daniel@polibatam.ac.id
Clamp-Meter Pengukur Arus AC Berbasis Mikrokontroller Tanu Dwitama, Daniel Sutopo P. Politeknik Batam Parkway Street, Batam Centre, Batam 29461, Indonesia E-mail: tanudwitama@yahoo.co.id, daniel@polibatam.ac.id
SEBAGAI SENSOR CAHAYA DAN SENSOR SUHU PADA MODEL SISTEM PENGERING OTOMATIS PRODUK PERTANIAN BERBASIS ATMEGA8535
 3 PENERAPAN FILM Ba 0,55 Sr 0,45 TiO 3 (BST) SEBAGAI SENSOR CAHAYA DAN SENSOR SUHU PADA MODEL SISTEM PENGERING OTOMATIS PRODUK PERTANIAN BERBASIS ATMEGA8535 23 Pendahuluan Indonesia sebagai negara agraris
3 PENERAPAN FILM Ba 0,55 Sr 0,45 TiO 3 (BST) SEBAGAI SENSOR CAHAYA DAN SENSOR SUHU PADA MODEL SISTEM PENGERING OTOMATIS PRODUK PERTANIAN BERBASIS ATMEGA8535 23 Pendahuluan Indonesia sebagai negara agraris
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari alat akuisisi data termokopel 8 kanal. 3.1. Gambaran Sistem Alat yang direalisasikan
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari alat akuisisi data termokopel 8 kanal. 3.1. Gambaran Sistem Alat yang direalisasikan
BAB III DESKRIPSI MASALAH
 BAB III DESKRIPSI MASALAH 3.1 Perancangan Hardware Perancangan hardware ini meliputi keseluruhan perancangan, artinya dari masukan sampai keluaran dengan menghasilkan energi panas. Dibawah ini adalah diagram
BAB III DESKRIPSI MASALAH 3.1 Perancangan Hardware Perancangan hardware ini meliputi keseluruhan perancangan, artinya dari masukan sampai keluaran dengan menghasilkan energi panas. Dibawah ini adalah diagram
BAB II LANDASAN TEORI. ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc
 BAB II LANDASAN TEORI 2.1. Mikrokontroller ATMega 8535 ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc Processor) keluarga ATMega. Mikrokontroller AVR memiliki arsitektur 8 bit, dimana
BAB II LANDASAN TEORI 2.1. Mikrokontroller ATMega 8535 ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc Processor) keluarga ATMega. Mikrokontroller AVR memiliki arsitektur 8 bit, dimana
BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM
 BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM III.1. Analisa Masalah Dalam perancangan sistem otomatisasi pemakaian listrik pada ruang belajar berbasis mikrokontroler terdapat beberapa masalah yang harus
BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM III.1. Analisa Masalah Dalam perancangan sistem otomatisasi pemakaian listrik pada ruang belajar berbasis mikrokontroler terdapat beberapa masalah yang harus
BAB III PERANCANGAN SISTEM. sebuah alat pemroses data yang sama, ruang kerja yang sama sehingga
 BAB III PERANCANGAN SISTEM 3.1. Blok Diagram Sistem Untuk dapat membandingkan LM35DZ dengan DS18B20 digunakan sebuah alat pemroses data yang sama, ruang kerja yang sama sehingga perbandinganya dapat lebih
BAB III PERANCANGAN SISTEM 3.1. Blok Diagram Sistem Untuk dapat membandingkan LM35DZ dengan DS18B20 digunakan sebuah alat pemroses data yang sama, ruang kerja yang sama sehingga perbandinganya dapat lebih
BAB III PERANCANGAN ALAT. Gambar 3.1 Diagram Blok Pengukur Kecepatan
 BAB III PERANCANGAN ALAT 3.1 PERANCANGAN PERANGKAT KERAS Setelah mempelajari teori yang menunjang dalam pembuatan alat, maka langkah berikutnya adalah membuat suatu rancangan dengan tujuan untuk mempermudah
BAB III PERANCANGAN ALAT 3.1 PERANCANGAN PERANGKAT KERAS Setelah mempelajari teori yang menunjang dalam pembuatan alat, maka langkah berikutnya adalah membuat suatu rancangan dengan tujuan untuk mempermudah
BAB III TEORI PENUNJANG. Microcontroller adalah sebuah sistem fungsional dalam sebuah chip. Di
 BAB III TEORI PENUNJANG 3.1. Microcontroller ATmega8 Microcontroller adalah sebuah sistem fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti proccesor, memori (sejumlah kecil RAM, memori
BAB III TEORI PENUNJANG 3.1. Microcontroller ATmega8 Microcontroller adalah sebuah sistem fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti proccesor, memori (sejumlah kecil RAM, memori
BAB III PERENCANAAN DAN REALISASI SISTEM
 42 BAB III PERENCANAAN DAN REALISASI SISTEM Pada bab ini dijelaskan pembuatan alat yang dibuat dalam proyek tugas akhir dengan judul rancang bangun sistem kontrol suhu dan kelembaban berbasis mirkrokontroler
42 BAB III PERENCANAAN DAN REALISASI SISTEM Pada bab ini dijelaskan pembuatan alat yang dibuat dalam proyek tugas akhir dengan judul rancang bangun sistem kontrol suhu dan kelembaban berbasis mirkrokontroler
III. METODOLOGI PENELITIAN. Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009
 III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS
 BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS 3.1. Pendahuluan Perangkat pengolah sinyal yang dikembangkan pada tugas sarjana ini dirancang dengan tiga kanal masukan. Pada perangkat pengolah sinyal
BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS 3.1. Pendahuluan Perangkat pengolah sinyal yang dikembangkan pada tugas sarjana ini dirancang dengan tiga kanal masukan. Pada perangkat pengolah sinyal
Gambar 2.1 Mikrokontroler ATMega 8535 (sumber :Mikrokontroler Belajar AVR Mulai dari Nol)
") BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler Mikrokontroler merupakan keseluruhan sistem komputer yang dikemas menjadi sebuah chip di mana di dalamnya sudah terdapat Mikroprosesor, I/O Pendukung, Memori
BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler Mikrokontroler merupakan keseluruhan sistem komputer yang dikemas menjadi sebuah chip di mana di dalamnya sudah terdapat Mikroprosesor, I/O Pendukung, Memori
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini menjelaskan tentang perancangan sistem alarm kebakaran menggunakan Arduino Uno dengan mikrokontroller ATmega 328. yang meliputi perancangan perangkat keras (hardware)
BAB III PERANCANGAN ALAT Pada bab ini menjelaskan tentang perancangan sistem alarm kebakaran menggunakan Arduino Uno dengan mikrokontroller ATmega 328. yang meliputi perancangan perangkat keras (hardware)
BAB III PERANCANGAN DAN PEMBUATAN ALAT Flow Chart Perancangan dan Pembuatan Alat. Mulai. Tinjauan pustaka
 59 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1. Flow Chart Perancangan dan Pembuatan Alat Mulai Tinjauan pustaka Simulasi dan perancangan alat untuk pengendali kecepatan motor DC dengan kontroler PID analog
59 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1. Flow Chart Perancangan dan Pembuatan Alat Mulai Tinjauan pustaka Simulasi dan perancangan alat untuk pengendali kecepatan motor DC dengan kontroler PID analog
BAB III PERANCANGAN ALAT DAN PROGRAM MIKROKONTROLER. program pada software Code Vision AVR dan penanaman listing program pada
 BAB III PERANCANGAN ALAT DAN PROGRAM MIKROKONTROLER Pada tahap perancangan ini dibagi menjadi 2 tahap perancangan. Tahap pertama adalah perancangan perangkat keras (hardware), yang meliputi rangkaian rangkaian
BAB III PERANCANGAN ALAT DAN PROGRAM MIKROKONTROLER Pada tahap perancangan ini dibagi menjadi 2 tahap perancangan. Tahap pertama adalah perancangan perangkat keras (hardware), yang meliputi rangkaian rangkaian
BAB IV ANALISIS RANGKAIAN ELEKTRONIK
 BAB IV ANALISIS RANGKAIAN ELEKTRONIK 4.1 Rangkaian Pengontrol Bagian pengontrol sistem kontrol daya listrik, menggunakan mikrokontroler PIC18F4520 seperti yang ditunjukkan pada Gambar 30. Dengan osilator
BAB IV ANALISIS RANGKAIAN ELEKTRONIK 4.1 Rangkaian Pengontrol Bagian pengontrol sistem kontrol daya listrik, menggunakan mikrokontroler PIC18F4520 seperti yang ditunjukkan pada Gambar 30. Dengan osilator
BAB III METODE PENELITIAN. Metode penelitian yang digunakan adalah metode eksperimen. Eksperimen
 BAB III METODE PENELITIAN A. METODE PENELITIAN Metode penelitian yang digunakan adalah metode eksperimen. Eksperimen didalamnya termasuk adalah pengambilan data dan membangun sistem kontrol temperatur.
BAB III METODE PENELITIAN A. METODE PENELITIAN Metode penelitian yang digunakan adalah metode eksperimen. Eksperimen didalamnya termasuk adalah pengambilan data dan membangun sistem kontrol temperatur.
III. METODE PENELITIAN. dari bulan November 2014 s/d Desember Alat dan bahan yang digunakan dalam perancangan Catu Daya DC ini yaitu :
 III. METODE PENELITIAN 3.1. Waktu dan Tempat Penelitian Penelitian tugas akhir ini dilakukan di laboratorium Teknik Kendali Jurusan Teknik Elektro, Fakultas Teknik, Universitas Lampung yang dilaksanakan
III. METODE PENELITIAN 3.1. Waktu dan Tempat Penelitian Penelitian tugas akhir ini dilakukan di laboratorium Teknik Kendali Jurusan Teknik Elektro, Fakultas Teknik, Universitas Lampung yang dilaksanakan
BAB III METODOLOGI PENULISAN
 BAB III METODOLOGI PENULISAN 3.1 Blok Diagram Gambar 3.1 Blok Diagram Fungsi dari masing-masing blok diatas adalah sebagai berikut : 1. Finger Sensor Finger sensor berfungsi mendeteksi aliran darah yang
BAB III METODOLOGI PENULISAN 3.1 Blok Diagram Gambar 3.1 Blok Diagram Fungsi dari masing-masing blok diatas adalah sebagai berikut : 1. Finger Sensor Finger sensor berfungsi mendeteksi aliran darah yang
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1. Sistem Minimum AVR USB Sistem minimum ATMega 8535 yang didesain sesederhana mungkin yang memudahkan dalam belajar mikrokontroller AVR tipe 8535, dilengkapi internal downloader
BAB II LANDASAN TEORI 2.1. Sistem Minimum AVR USB Sistem minimum ATMega 8535 yang didesain sesederhana mungkin yang memudahkan dalam belajar mikrokontroller AVR tipe 8535, dilengkapi internal downloader
BAB III PERANCANGAN DAN REALISASI ALAT
 BAB III PERANCANGAN DAN REALISASI ALAT Pada bab ini akan dijelaskan perancangan skripsi yang dibuat yang terdiri dari perancangan perangkat keras dan perancangan perangkat lunak. Perancangan perangkat
BAB III PERANCANGAN DAN REALISASI ALAT Pada bab ini akan dijelaskan perancangan skripsi yang dibuat yang terdiri dari perancangan perangkat keras dan perancangan perangkat lunak. Perancangan perangkat
SISTEM MONITORING LEVEL AIR MENGGUNAKAN KENDALI PID
 SISTEM MONITORING LEVEL AIR MENGGUNAKAN KENDALI PID TUGAS AKHIR Oleh : TAUFIQ NUR IKHSAN 3210801015 Disusun untuk memenuhi syarat kelulusan Program Diploma III Program Studi Teknik Elektronika Politeknik
SISTEM MONITORING LEVEL AIR MENGGUNAKAN KENDALI PID TUGAS AKHIR Oleh : TAUFIQ NUR IKHSAN 3210801015 Disusun untuk memenuhi syarat kelulusan Program Diploma III Program Studi Teknik Elektronika Politeknik
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1. MOSFET MOSFET atau Metal Oxyde Semiconductor Field Effect Transistor merupakan salah satu jenis transistor efek medan (FET). MOSFET memiliki tiga pin yaitu gerbang (gate), penguras
BAB II LANDASAN TEORI 2.1. MOSFET MOSFET atau Metal Oxyde Semiconductor Field Effect Transistor merupakan salah satu jenis transistor efek medan (FET). MOSFET memiliki tiga pin yaitu gerbang (gate), penguras
BAB III PERANCANGAN DAN REALISASI PERANGKAT KERAS DAN PERANGKAT LUNAK SISTEM. Dari diagram sistem dapat diuraikan metode kerja sistem secara global.
 BAB III PERANCANGAN DAN REALISASI PERANGKAT KERAS DAN PERANGKAT LUNAK SISTEM 3.1 Perancangan Perangkat Keras 3.1.1 Blok Diagram Dari diagram sistem dapat diuraikan metode kerja sistem secara global. Gambar
BAB III PERANCANGAN DAN REALISASI PERANGKAT KERAS DAN PERANGKAT LUNAK SISTEM 3.1 Perancangan Perangkat Keras 3.1.1 Blok Diagram Dari diagram sistem dapat diuraikan metode kerja sistem secara global. Gambar
II. TINJAUAN PUSTAKA. Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR
 II. TINJAUAN PUSTAKA A. Mikrokontroler ATmega8535 Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR (Alf and Vegard s Risc Processor) yang diproduksi oleh Atmel Corporation.
II. TINJAUAN PUSTAKA A. Mikrokontroler ATmega8535 Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR (Alf and Vegard s Risc Processor) yang diproduksi oleh Atmel Corporation.
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISEM 3.1. Perancangan Perangkat Keras Blok diagram yang dibuat pada perancangan tugas akhir ini secara keseluruhan dapat dilihat pada gambar 3.1. Keypad Sensor 1 Sensor 2 Sensor 3
BAB III PERANCANGAN SISEM 3.1. Perancangan Perangkat Keras Blok diagram yang dibuat pada perancangan tugas akhir ini secara keseluruhan dapat dilihat pada gambar 3.1. Keypad Sensor 1 Sensor 2 Sensor 3
BAB III KEGIATAN PENELITIAN TERAPAN
 BAB III KEGIATAN PENELITIAN TERAPAN Pada bab ini akan dijelaskan langkah-langkah yang akan digunakan dalam menyelesaikan Alat Simulasi Pembangkit Sinyal Jantung, berupa perangkat keras (hardware) dan perangkat
BAB III KEGIATAN PENELITIAN TERAPAN Pada bab ini akan dijelaskan langkah-langkah yang akan digunakan dalam menyelesaikan Alat Simulasi Pembangkit Sinyal Jantung, berupa perangkat keras (hardware) dan perangkat
BAB 3 PERANCANGAN SISTEM
 BAB 3 PERACAGA SISTEM Pada bab ini penulis akan menjelaskan mengenai perencanaan modul pengatur mas pada mobile x-ray berbasis mikrokontroller atmega8535 yang meliputi perencanaan dan pembuatan rangkaian
BAB 3 PERACAGA SISTEM Pada bab ini penulis akan menjelaskan mengenai perencanaan modul pengatur mas pada mobile x-ray berbasis mikrokontroller atmega8535 yang meliputi perencanaan dan pembuatan rangkaian
BAB II TINJAUAN PUSTAKA. Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam
 BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler ATMega 8535 Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Mikrokontroler AVR ini memiliki arsitektur
BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler ATMega 8535 Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Mikrokontroler AVR ini memiliki arsitektur
BAB II LANDASAN TEORI. telur,temperature yang diperlukan berkisar antara C. Untuk hasil yang optimal dalam
 BAB II LANDASAN TEORI Temperatur merupakan faktor utama yang menentukan keberhasilan mesin penetas telur,temperature yang diperlukan berkisar antara 38-39 0 C. Untuk hasil yang optimal dalam Pembuatan
BAB II LANDASAN TEORI Temperatur merupakan faktor utama yang menentukan keberhasilan mesin penetas telur,temperature yang diperlukan berkisar antara 38-39 0 C. Untuk hasil yang optimal dalam Pembuatan
BAB III METODOLOGI PENELITIAN. Adapun blok diagram modul baby incubator ditunjukkan pada Gambar 3.1.
 23 BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram Modul Baby Incubator Adapun blok diagram modul baby incubator ditunjukkan pada Gambar 3.1. PLN THERMOSTAT POWER SUPPLY FAN HEATER DRIVER HEATER DISPLAY
23 BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram Modul Baby Incubator Adapun blok diagram modul baby incubator ditunjukkan pada Gambar 3.1. PLN THERMOSTAT POWER SUPPLY FAN HEATER DRIVER HEATER DISPLAY
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI Pada bab ini akan dibahas dasar teori yang berhubungan dengan perancangan skripsi antara lain fungsi dari function generator, osilator, MAX038, rangkaian operasional amplifier, Mikrokontroler
BAB II LANDASAN TEORI Pada bab ini akan dibahas dasar teori yang berhubungan dengan perancangan skripsi antara lain fungsi dari function generator, osilator, MAX038, rangkaian operasional amplifier, Mikrokontroler
BAB IV CARA KERJA DAN PERANCANGAN SISTEM. ketiga juri diarea pertandingan menekan keypad pada alat pencatat score, setelah
 BAB IV CARA KERJA DAN PERANCANGAN SISTEM 4.1 Diagram Blok Sistem Blok diagram dibawah ini menjelaskan bahwa ketika juri dari salah satu bahkan ketiga juri diarea pertandingan menekan keypad pada alat pencatat
BAB IV CARA KERJA DAN PERANCANGAN SISTEM 4.1 Diagram Blok Sistem Blok diagram dibawah ini menjelaskan bahwa ketika juri dari salah satu bahkan ketiga juri diarea pertandingan menekan keypad pada alat pencatat
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
II. TINJAUAN PUSTAKA
 II. TINJAUAN PUSTAKA 2.1. Pengertian Sistem Kendali Sistem kendali adalah suatu sistem yang keluaran sistemnya dikendalikan pada suatu nilai tertentu atau untuk mengubah beberapa ketentuan yang telah ditetapkan
II. TINJAUAN PUSTAKA 2.1. Pengertian Sistem Kendali Sistem kendali adalah suatu sistem yang keluaran sistemnya dikendalikan pada suatu nilai tertentu atau untuk mengubah beberapa ketentuan yang telah ditetapkan
BAB III PEMBUATAN ALAT Tujuan Pembuatan Tujuan dari pembuatan alat ini yaitu untuk mewujudkan gagasan dan
 BAB III PEMBUATAN ALAT 3.. Pembuatan Dalam pembuatan suatu alat atau produk perlu adanya sebuah rancangan yang menjadi acuan dalam proses pembuatanya, sehingga kesalahan yang mungkin timbul dapat ditekan
BAB III PEMBUATAN ALAT 3.. Pembuatan Dalam pembuatan suatu alat atau produk perlu adanya sebuah rancangan yang menjadi acuan dalam proses pembuatanya, sehingga kesalahan yang mungkin timbul dapat ditekan
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 2.1. Mikrokontroller AVR Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan serta keluaran serta dapat di read dan write dengan cara khusus. Mikrokontroller
BAB 2 LANDASAN TEORI 2.1. Mikrokontroller AVR Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan serta keluaran serta dapat di read dan write dengan cara khusus. Mikrokontroller
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perencanaan pembuatan alat telemetri suhu tubuh.perencanaan dilakukan dengan menentukan spesfikasi system secara umum,membuat system blok
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perencanaan pembuatan alat telemetri suhu tubuh.perencanaan dilakukan dengan menentukan spesfikasi system secara umum,membuat system blok
BAB II LANDASAN TEORI. pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system.
 BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
BAB II DASAR TEORI. open-source, diturunkan dari Wiring platform, dirancang untuk. software arduino memiliki bahasa pemrograman C.
 BAB II DASAR TEORI 2.1 ARDUINO Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.
BAB II DASAR TEORI 2.1 ARDUINO Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1. Analisa Permasalahan Dalam perancangan alat pengendali kipas angin menggunnakan mikrokontroler ATMEGA8535 berbasis sensor suhu LM35 terdapat beberapa masalah yang
BAB III ANALISA DAN PERANCANGAN III.1. Analisa Permasalahan Dalam perancangan alat pengendali kipas angin menggunnakan mikrokontroler ATMEGA8535 berbasis sensor suhu LM35 terdapat beberapa masalah yang
BAB III METODE PENELITIAN. Pada pengerjaan tugas akhir ini metode penelitian yang dilakukan yaitu. dengan penelitian yang dilakukan.
 BAB III METODE PENELITIAN 3.1. METODE PENELITIAN Pada pengerjaan tugas akhir ini metode penelitian yang dilakukan yaitu sebagai berikut : Studi literatur, yaitu dengan mempelajari beberapa referensi yang
BAB III METODE PENELITIAN 3.1. METODE PENELITIAN Pada pengerjaan tugas akhir ini metode penelitian yang dilakukan yaitu sebagai berikut : Studi literatur, yaitu dengan mempelajari beberapa referensi yang
III. METODE PENELITIAN. Penelitian ini dilaksanakan mulai pada November 2011 hingga Mei Adapun tempat
 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian ini dilaksanakan mulai pada November 2011 hingga Mei 2012. Adapun tempat pelaksanaan penelitian ini adalah di Laboratorium Elektronika Dasar
III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian ini dilaksanakan mulai pada November 2011 hingga Mei 2012. Adapun tempat pelaksanaan penelitian ini adalah di Laboratorium Elektronika Dasar
BAB II DASAR TEORI. mikrokontroler yang berbasis chip ATmega328P. Arduino Uno. memiliki 14 digital pin input / output (atau biasa ditulis I/O,
 BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino Uno R3 adalah papan pengembangan mikrokontroler yang berbasis chip ATmega328P. Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O,
BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino Uno R3 adalah papan pengembangan mikrokontroler yang berbasis chip ATmega328P. Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O,
II. TINJAUAN PUSTAKA. kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
 II. TINJAUAN PUSTAKA A. Temperatur dan Kelembaban Temperatur dan kelembaban merupakan aspek yang penting dalam menentukan kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
II. TINJAUAN PUSTAKA A. Temperatur dan Kelembaban Temperatur dan kelembaban merupakan aspek yang penting dalam menentukan kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
BAB III RANCANG BANGUN SISTEM KARAKTERISASI LED. Rancangan sistem karakterisasi LED diperlihatkan pada blok diagram Gambar
 BAB III RANCANG BANGUN SISTEM KARAKTERISASI LED 3.1. Rancang Bangun Perangkat Keras Rancangan sistem karakterisasi LED diperlihatkan pada blok diagram Gambar 3.1. Sistem ini terdiri dari komputer, antarmuka
BAB III RANCANG BANGUN SISTEM KARAKTERISASI LED 3.1. Rancang Bangun Perangkat Keras Rancangan sistem karakterisasi LED diperlihatkan pada blok diagram Gambar 3.1. Sistem ini terdiri dari komputer, antarmuka
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT 3.1 Definisi Perancangan Perancangan adalah proses menuangkan ide dan gagasan berdasarkan teoriteori dasar yang mendukung. Proses perancangan dapat dilakukan dengan cara pemilihan
BAB III PERANCANGAN ALAT 3.1 Definisi Perancangan Perancangan adalah proses menuangkan ide dan gagasan berdasarkan teoriteori dasar yang mendukung. Proses perancangan dapat dilakukan dengan cara pemilihan
BAB III PERANCANGAN. bayi yang dilengkapi sistem telemetri dengan jaringan RS485. Secara umum, sistem. 2. Modul pemanas dan pengendali pemanas
 BAB III PERANCANGAN 3.1. Gambaran Umum Sistem Sistem yang akan dirancang dan direalisasikan merupakan sebuah inkubator bayi yang dilengkapi sistem telemetri dengan jaringan RS485. Secara umum, sistem yang
BAB III PERANCANGAN 3.1. Gambaran Umum Sistem Sistem yang akan dirancang dan direalisasikan merupakan sebuah inkubator bayi yang dilengkapi sistem telemetri dengan jaringan RS485. Secara umum, sistem yang
BAB III METODOLOGI PENELITIAN
 BAB III METODOLOGI PENELITIAN 3. 1. Blok Diagram Hot Plate Program LCD TOMBOL SUHU MIKROKON TROLER DRIVER HEATER HEATER START/ RESET AVR ATMega 8535 Gambar 3.1. Blok Diagram Hot Plate Fungsi masing-masing
BAB III METODOLOGI PENELITIAN 3. 1. Blok Diagram Hot Plate Program LCD TOMBOL SUHU MIKROKON TROLER DRIVER HEATER HEATER START/ RESET AVR ATMega 8535 Gambar 3.1. Blok Diagram Hot Plate Fungsi masing-masing
BAB IV PENGUJIAN DAN ANALISA DATA
 BAB IV PENGUJIAN AN ANALISA ATA Pada bab ini akan dibahas tentang pengujian dan pengoperasian Sistem Pendeteksi Kebocoran Gas pada Rumah Berbasis Layanan Pesan Singkat yang telah selesai dirancang. Pengujian
BAB IV PENGUJIAN AN ANALISA ATA Pada bab ini akan dibahas tentang pengujian dan pengoperasian Sistem Pendeteksi Kebocoran Gas pada Rumah Berbasis Layanan Pesan Singkat yang telah selesai dirancang. Pengujian
BAB III PERANCANGAN ALAT PENDETEKSI KERUSAKAN KABEL
 BAB III PERANCANGAN ALAT PENDETEKSI KERUSAKAN KABEL. Diagram Blok Diagram blok merupakan gambaran dasar membahas tentang perancangan dan pembuatan alat pendeteksi kerusakan kabel, dari rangkaian sistem
BAB III PERANCANGAN ALAT PENDETEKSI KERUSAKAN KABEL. Diagram Blok Diagram blok merupakan gambaran dasar membahas tentang perancangan dan pembuatan alat pendeteksi kerusakan kabel, dari rangkaian sistem
BAB 3 PERANCANGAN ALAT DAN PEMBUATAN SISTEM
 27 BAB 3 PERANCANGAN ALAT DAN PEMBUATAN SISTEM 3.1. Diagram Blok Sistem Diagram merupakan pernyataan hubungan yang berurutan dari satu atau lebih komponen yang memiliki satuam kerja tersendiri dan setiap
27 BAB 3 PERANCANGAN ALAT DAN PEMBUATAN SISTEM 3.1. Diagram Blok Sistem Diagram merupakan pernyataan hubungan yang berurutan dari satu atau lebih komponen yang memiliki satuam kerja tersendiri dan setiap
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan dan Implementasi Penyaji Minuman Otomatis Berbasis Mikrokontroler ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan
BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan dan Implementasi Penyaji Minuman Otomatis Berbasis Mikrokontroler ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 1.1 Penelitian Terdahulu Sebagai bahan pertimbangan dalam penelitian ini akan dicantumkan beberapa hasil penelitian terdahulu : Penelitian yang dilakukan oleh Universitas Islam
BAB II TINJAUAN PUSTAKA 1.1 Penelitian Terdahulu Sebagai bahan pertimbangan dalam penelitian ini akan dicantumkan beberapa hasil penelitian terdahulu : Penelitian yang dilakukan oleh Universitas Islam
RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535
 RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535 Masriadi dan Frida Agung Rakhmadi Program Studi Fisika Fakultas Sains dan Teknologi UIN Sunan Kalijaga Jl. Marsda
RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535 Masriadi dan Frida Agung Rakhmadi Program Studi Fisika Fakultas Sains dan Teknologi UIN Sunan Kalijaga Jl. Marsda
kali tombol ON ditekan untuk memulai proses menghidupkan alat. Setting
 27 BAB III METODOLOGI 3.1 Diagram Blok dan Cara Kerja Diagram blok dan cara kerja dapat dilihat pada gambar 3.1. Gambar 3.1. Blok diagram Prototipe Blood warmer Tegangan PLN diturunkan dan disearahkan
27 BAB III METODOLOGI 3.1 Diagram Blok dan Cara Kerja Diagram blok dan cara kerja dapat dilihat pada gambar 3.1. Gambar 3.1. Blok diagram Prototipe Blood warmer Tegangan PLN diturunkan dan disearahkan
BAB 3 PERANCANGAN SISTEM. pada sistem pengendali lampu telah dijelaskan pada bab 2. Pada bab ini akan dijelaskan
 BAB 3 PERANCANGAN SISTEM Konsep dasar mengendalikan lampu dan komponen komponen yang digunakan pada sistem pengendali lampu telah dijelaskan pada bab 2. Pada bab ini akan dijelaskan perancangan sistem
BAB 3 PERANCANGAN SISTEM Konsep dasar mengendalikan lampu dan komponen komponen yang digunakan pada sistem pengendali lampu telah dijelaskan pada bab 2. Pada bab ini akan dijelaskan perancangan sistem
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan perancangan alat, yaitu perancangan perangkat keras dan perancangan perangkat lunak. Perancangan perangkat keras terdiri dari perangkat elektronik
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan perancangan alat, yaitu perancangan perangkat keras dan perancangan perangkat lunak. Perancangan perangkat keras terdiri dari perangkat elektronik
Mikrokontroler AVR. Hendawan Soebhakti 2009
 Mikrokontroler AVR Hendawan Soebhakti 2009 Tujuan Mampu menjelaskan arsitektur mikrokontroler ATMega 8535 Mampu membuat rangkaian minimum sistem ATMega 8535 Mampu membuat rangkaian downloader ATMega 8535
Mikrokontroler AVR Hendawan Soebhakti 2009 Tujuan Mampu menjelaskan arsitektur mikrokontroler ATMega 8535 Mampu membuat rangkaian minimum sistem ATMega 8535 Mampu membuat rangkaian downloader ATMega 8535
BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN
 BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN Konsep dasar sistem monitoring tekanan ban pada sepeda motor secara nirkabel ini terdiri dari modul sensor yang terpasang pada tutup pentil ban sepeda
BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN Konsep dasar sistem monitoring tekanan ban pada sepeda motor secara nirkabel ini terdiri dari modul sensor yang terpasang pada tutup pentil ban sepeda
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN Pada bab ini akan dijelaskan langkah-langkah yang akan digunakan dalam menyelesaikan perangkat keras (hardware) yang berupa komponen fisik penunjang seperti IC AT89S52 dan perangkat
BAB III METODE PENELITIAN Pada bab ini akan dijelaskan langkah-langkah yang akan digunakan dalam menyelesaikan perangkat keras (hardware) yang berupa komponen fisik penunjang seperti IC AT89S52 dan perangkat
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT 1.1 Blok Diagram Sensor Kunci kontak Transmiter GSM Modem Recivier Handphone Switch Aktif Sistem pengamanan Mikrokontroler Relay Pemutus CDI LED indikator aktif Alarm Buzzer Gambar
BAB III PERANCANGAN ALAT 1.1 Blok Diagram Sensor Kunci kontak Transmiter GSM Modem Recivier Handphone Switch Aktif Sistem pengamanan Mikrokontroler Relay Pemutus CDI LED indikator aktif Alarm Buzzer Gambar
BAB III PERANCANGAN SISTEM
 21 BAB III PERANCANGAN SISTEM 3.1 Rangkaian Keseluruhan Sistem kendali yang dibuat ini terdiri dari beberapa blok bagian yaitu blok bagian plant (objek yang dikendalikan), blok bagian sensor, blok interface
21 BAB III PERANCANGAN SISTEM 3.1 Rangkaian Keseluruhan Sistem kendali yang dibuat ini terdiri dari beberapa blok bagian yaitu blok bagian plant (objek yang dikendalikan), blok bagian sensor, blok interface
BAB III DESAIN DAN PERANCANGAN
 13 BAB III DESAIN DAN PERANCANGAN 3.1 Perancangan Sistem Aplikasi ini membahas tentang penggunaan IC AT89S51 untuk kontrol suhu pada peralatan bantal terapi listrik. Untuk mendeteksi suhu bantal terapi
13 BAB III DESAIN DAN PERANCANGAN 3.1 Perancangan Sistem Aplikasi ini membahas tentang penggunaan IC AT89S51 untuk kontrol suhu pada peralatan bantal terapi listrik. Untuk mendeteksi suhu bantal terapi
MICROCONTROLER AVR AT MEGA 8535
 MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Jenis Mikrokontroler AVR dan spesifikasinya Flash adalah suatu jenis Read Only Memory yang biasanya diisi dengan program
MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Jenis Mikrokontroler AVR dan spesifikasinya Flash adalah suatu jenis Read Only Memory yang biasanya diisi dengan program
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Uraian Umum Dalam perancangan alat akses pintu keluar masuk menggunakan pin berbasis mikrokontroler AT89S52 ini, penulis mempunyai pemikiran untuk membantu mengatasi
BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Uraian Umum Dalam perancangan alat akses pintu keluar masuk menggunakan pin berbasis mikrokontroler AT89S52 ini, penulis mempunyai pemikiran untuk membantu mengatasi
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan langkah-langkah yang akan digunakan didalam menyelesaikan pembuatan alat elektrostimulator.perencanaan tersebut meliputi dua bagian yaitu perencanaan
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan langkah-langkah yang akan digunakan didalam menyelesaikan pembuatan alat elektrostimulator.perencanaan tersebut meliputi dua bagian yaitu perencanaan
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Definisi PWM Sinyal PWM pada umumnya memiliki amplitudo dan frekuensi dasar yang tetap, namun, lebar pulsanya bervariasi. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal
BAB II LANDASAN TEORI 2.1 Definisi PWM Sinyal PWM pada umumnya memiliki amplitudo dan frekuensi dasar yang tetap, namun, lebar pulsanya bervariasi. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal
PENGENDALIAN KECEPATAN MOTOR DC MENGGUNAKAN SENSOR ENCODER DENGAN KENDALI PI
 PENGENDALIAN KECEPATAN MOTOR DC MENGGUNAKAN SENSOR ENCODER DENGAN KENDALI PI Jumiyatun Jurusan Teknik Elektro Fakultas Teknik Universitas Tadolako E-mail: jum@untad.ac.id ABSTRACT Digital control system
PENGENDALIAN KECEPATAN MOTOR DC MENGGUNAKAN SENSOR ENCODER DENGAN KENDALI PI Jumiyatun Jurusan Teknik Elektro Fakultas Teknik Universitas Tadolako E-mail: jum@untad.ac.id ABSTRACT Digital control system
IV. HASIL DAN PEMBAHASAN. Hasil dari perancangan perangkat keras sistem penyiraman tanaman secara
 IV. HASIL DAN PEMBAHASAN A. Realisasi Perangkat Keras Hasil dari perancangan perangkat keras sistem penyiraman tanaman secara otomatis menggunakan sensor suhu LM35 ditunjukkan pada gambar berikut : 8 6
IV. HASIL DAN PEMBAHASAN A. Realisasi Perangkat Keras Hasil dari perancangan perangkat keras sistem penyiraman tanaman secara otomatis menggunakan sensor suhu LM35 ditunjukkan pada gambar berikut : 8 6
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Bab ini menguraikan perancangan mekanik, perangkat elektronik dan perangkat lunak untuk membangun Pematrian komponen SMD dengan menggunakan conveyor untuk indutri kecil dengan
BAB III PERANCANGAN SISTEM Bab ini menguraikan perancangan mekanik, perangkat elektronik dan perangkat lunak untuk membangun Pematrian komponen SMD dengan menggunakan conveyor untuk indutri kecil dengan
BAB II KONSEP DASAR PERANCANGAN
 BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
MIKROKONTROLER Arsitektur Mikrokontroler AT89S51
 MIKROKONTROLER Arsitektur Mikrokontroler AT89S51 Ringkasan Pendahuluan Mikrokontroler Mikrokontroler = µp + Memori (RAM & ROM) + I/O Port + Programmable IC Mikrokontroler digunakan sebagai komponen pengendali
MIKROKONTROLER Arsitektur Mikrokontroler AT89S51 Ringkasan Pendahuluan Mikrokontroler Mikrokontroler = µp + Memori (RAM & ROM) + I/O Port + Programmable IC Mikrokontroler digunakan sebagai komponen pengendali
BAB III METODA PENELITIAN
 42 BAB III METODA PENELITIAN 3.1. Komponen yang digunakan lain: Adapun komponen-komponen penting dalam pembuatan modul ini antara 1. Lampu UV 2. IC Atmega 16 3. Termokopel 4. LCD 2x16 5. Relay 5 vdc 6.
42 BAB III METODA PENELITIAN 3.1. Komponen yang digunakan lain: Adapun komponen-komponen penting dalam pembuatan modul ini antara 1. Lampu UV 2. IC Atmega 16 3. Termokopel 4. LCD 2x16 5. Relay 5 vdc 6.
PROCEEDING. sepeti program untuk mengaktifkan dan PENERAPAN AUTOMATIC BUILDING SYSTEM DI PPNS. menonaktifkan AC, program untuk counter
 PROCEEDING PENERAPAN AUTOMATIC BUILDING SYSTEM DI PPNS (Sub Judul:MONITORING SISTIM PENGKONDISIAN UDARA DI LABORATORIUM REPARASI LISTRIK) Dengan meningkatnya dan semakin kompleknya persoalan penggunaan
PROCEEDING PENERAPAN AUTOMATIC BUILDING SYSTEM DI PPNS (Sub Judul:MONITORING SISTIM PENGKONDISIAN UDARA DI LABORATORIUM REPARASI LISTRIK) Dengan meningkatnya dan semakin kompleknya persoalan penggunaan
TUGAS AKHIR RANCANG BANGUN PESAWAT CENTRIFUGE BERBASIS MIKROKONTROLLER AT89C51. Diajukan guna melengkapi sebagian syarat
 TUGAS AKHIR RANCANG BANGUN PESAWAT CENTRIFUGE BERBASIS MIKROKONTROLLER AT89C51 Diajukan guna melengkapi sebagian syarat dalam mencapai gelar Sarjana Strata Satu ( S1 ) Disusun Oleh : Nama : Nanik Nur Apriyani
TUGAS AKHIR RANCANG BANGUN PESAWAT CENTRIFUGE BERBASIS MIKROKONTROLLER AT89C51 Diajukan guna melengkapi sebagian syarat dalam mencapai gelar Sarjana Strata Satu ( S1 ) Disusun Oleh : Nama : Nanik Nur Apriyani
BAB III ANALISIS MASALAH DAN RANCANGAN ALAT
 BAB III ANALISIS MASALAH DAN RANCANGAN ALAT III.1. Analisa Permasalahan Masalah yang dihadapi adalah bagaimana untuk menetaskan telur ayam dalam jumlah banyak dan dalam waktu yang bersamaan. Karena kemampuan
BAB III ANALISIS MASALAH DAN RANCANGAN ALAT III.1. Analisa Permasalahan Masalah yang dihadapi adalah bagaimana untuk menetaskan telur ayam dalam jumlah banyak dan dalam waktu yang bersamaan. Karena kemampuan
DAFTAR ISI HALAMAN PENGESAHAN... ABSTRAKSI... KATA PENGANTAR... DAFTAR ISI... DAFTAR TABEL... DAFTAR GAMBAR... DAFTAR LAMPIRAN...
 DAFTAR ISI HALAMAN PENGESAHAN... ABSTRAKSI... KATA PENGANTAR... DAFTAR ISI... DAFTAR TABEL... DAFTAR GAMBAR... Halaman DAFTAR LAMPIRAN... xviii DAFTAR ISTILAH DAN SINGKATAN... BAB I PENDAHULUAN 1.1 Latar
DAFTAR ISI HALAMAN PENGESAHAN... ABSTRAKSI... KATA PENGANTAR... DAFTAR ISI... DAFTAR TABEL... DAFTAR GAMBAR... Halaman DAFTAR LAMPIRAN... xviii DAFTAR ISTILAH DAN SINGKATAN... BAB I PENDAHULUAN 1.1 Latar
DAFTAR ISI. Halaman Judul. Lembar Pengesahan Pembimbing. Lembar Pengesahan Penguji. Halaman Persembahan. Halaman Motto. Kata Pengantar.
 DAFTAR ISI Halaman Judul Lembar Pengesahan Pembimbing Lembar Pengesahan Penguji Halaman Persembahan Halaman Motto Kata Pengantar Abstraksi Daftar Isi Daftar Gambar Daftar Tabel i ii iii iv v vi ix x xiv
DAFTAR ISI Halaman Judul Lembar Pengesahan Pembimbing Lembar Pengesahan Penguji Halaman Persembahan Halaman Motto Kata Pengantar Abstraksi Daftar Isi Daftar Gambar Daftar Tabel i ii iii iv v vi ix x xiv
BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]
![BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]](/thumbs/58/42409134.jpg "BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]") BAB II DASAR TEORI Dalam bab ini dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan skripsi yang dibuat. Teori-teori yang digunakan dalam pembuatan skripsi ini adalah sensor
BAB II DASAR TEORI Dalam bab ini dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan skripsi yang dibuat. Teori-teori yang digunakan dalam pembuatan skripsi ini adalah sensor
BAB II DASAR TEORI. Gambar 2.1. Untai Hard Clipping Aktif
 BAB II DASAR TEORI Pada bab ini akan dijelaskan teori-teori yang mendasari perancangan sistem alat efek gitar drive analog dengan sistem pengontrol digital. Pada alat efek gitar drive analog dengan sistem
BAB II DASAR TEORI Pada bab ini akan dijelaskan teori-teori yang mendasari perancangan sistem alat efek gitar drive analog dengan sistem pengontrol digital. Pada alat efek gitar drive analog dengan sistem
Bab III METODOLOGI PENELITIAN
 8 Bab III METODOLOGI PENELITIAN Pada bab ini akan dibahas mengenai perangkat keras dan perangkat lunak serta beberapa hal mengenai perancangan sistem keseluruhan sehingga sistem bekerja dengan baik sebagaimana
8 Bab III METODOLOGI PENELITIAN Pada bab ini akan dibahas mengenai perangkat keras dan perangkat lunak serta beberapa hal mengenai perancangan sistem keseluruhan sehingga sistem bekerja dengan baik sebagaimana
REFS0-1 (Reference Selection Bits) REFS0-1 adalah bit-bit pengatur mode tegangan referensi ADC.
 REFS0-1 adalah bit-bit pengatur mode tegangan referensi ADC.") JOBSHEET VI MENGGUNAKAN ANALOG TO DIGITAL CONVERTER (ADC) DALAM MIKROKONTROLLER ATMEGA8535 1 TUJUAN Mengetahui dan memahami cara menggunakan ADC yang ada di dalam mikrokontroler. Mengetahui dan memahami
JOBSHEET VI MENGGUNAKAN ANALOG TO DIGITAL CONVERTER (ADC) DALAM MIKROKONTROLLER ATMEGA8535 1 TUJUAN Mengetahui dan memahami cara menggunakan ADC yang ada di dalam mikrokontroler. Mengetahui dan memahami
III. METODE PENELITIAN. Penelitian tugas akhir ini dilaksanakan di Laboratorium Elektronika Dasar
 28 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian tugas akhir ini dilaksanakan di Laboratorium Elektronika Dasar dan Laboratorium Pemodelan Jurusan Fisika Universitas Lampung. Penelitian
28 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Penelitian tugas akhir ini dilaksanakan di Laboratorium Elektronika Dasar dan Laboratorium Pemodelan Jurusan Fisika Universitas Lampung. Penelitian
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.2.1.1 Sensor Load Cell Prinsip kerja dari sensor tekanan ini adalah mengubah tegangan mekanis menjadi sinyal listrik. Ukuran ketegangan didasarkan pada prinsip bahwa tahanan pengantar
BAB II LANDASAN TEORI 2.2.1.1 Sensor Load Cell Prinsip kerja dari sensor tekanan ini adalah mengubah tegangan mekanis menjadi sinyal listrik. Ukuran ketegangan didasarkan pada prinsip bahwa tahanan pengantar
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Masalah Dalam bab ini akan dibahas masalah-masalah yang muncul dalam perancangan alat dan aplikasi program, serta pemecahan-pemecahan dari masalah yang
BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Masalah Dalam bab ini akan dibahas masalah-masalah yang muncul dalam perancangan alat dan aplikasi program, serta pemecahan-pemecahan dari masalah yang
BAB IV CARA KERJA DAN PERANCANGAN SISTEM. Gambar 4.1 Blok Diagram Sistem. bau gas yang akan mempengaruhi nilai hambatan internal pada sensor gas
 BAB IV CARA KERJA DAN PERANCANGAN SISTEM 4.1 Blok Diagram Sistem Sensor Gas Komparator Osilator Penyangga/ Buffer Buzzer Multivibrator Bistabil Multivibrator Astabil Motor Servo Gambar 4.1 Blok Diagram
BAB IV CARA KERJA DAN PERANCANGAN SISTEM 4.1 Blok Diagram Sistem Sensor Gas Komparator Osilator Penyangga/ Buffer Buzzer Multivibrator Bistabil Multivibrator Astabil Motor Servo Gambar 4.1 Blok Diagram
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI II.1. Tinjauan Pustaka 1. Perancangan Telemetri Suhu dengan Modulasi Digital FSK-FM (Sukiswo,2005) Penelitian ini menjelaskan perancangan telemetri suhu dengan modulasi FSK-FM. Teknik
BAB II LANDASAN TEORI II.1. Tinjauan Pustaka 1. Perancangan Telemetri Suhu dengan Modulasi Digital FSK-FM (Sukiswo,2005) Penelitian ini menjelaskan perancangan telemetri suhu dengan modulasi FSK-FM. Teknik
BAB III DESKRIPSI DAN PERANCANGAN SISTEM
 BAB III DESKRIPSI DAN PERANCANGAN SISTEM 3.1. DESKRIPSI KERJA SISTEM Gambar 3.1. Blok diagram sistem Satelit-satelit GPS akan mengirimkan sinyal-sinyal secara kontinyu setiap detiknya. GPS receiver akan
BAB III DESKRIPSI DAN PERANCANGAN SISTEM 3.1. DESKRIPSI KERJA SISTEM Gambar 3.1. Blok diagram sistem Satelit-satelit GPS akan mengirimkan sinyal-sinyal secara kontinyu setiap detiknya. GPS receiver akan
Sistem Minimum Mikrokontroler. TTH2D3 Mikroprosesor
 Sistem Minimum Mikrokontroler TTH2D3 Mikroprosesor MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang memiliki
Sistem Minimum Mikrokontroler TTH2D3 Mikroprosesor MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang memiliki
BAB III METODE PENELITIAN
 BAB III METODE PENELITIAN Metodologi penelitian yang digunakan dalam perancangan sistem ini antara lain studi kepustakaan, meninjau tempat pembuatan tahu untuk mendapatkan dan mengumpulkan sumber informasi
BAB III METODE PENELITIAN Metodologi penelitian yang digunakan dalam perancangan sistem ini antara lain studi kepustakaan, meninjau tempat pembuatan tahu untuk mendapatkan dan mengumpulkan sumber informasi
BAB 3 PERANCANGAN ALAT. Sensor Utrasonik. Relay. Relay
 BAB 3 PERANCANGAN ALAT 3.1 Diagram Blok Berikut ini adalah diagram blok sistem rancang bangun alat pengontrol volume air dan aerator pada kolam budidaya udang menggunakan mikrokontroler. Sensor Utrasonik
BAB 3 PERANCANGAN ALAT 3.1 Diagram Blok Berikut ini adalah diagram blok sistem rancang bangun alat pengontrol volume air dan aerator pada kolam budidaya udang menggunakan mikrokontroler. Sensor Utrasonik
DESAIN SENSORLESS (MINIMUM SENSOR) KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI. Toni Putra Agus Setiawan, Hari Putranto
 KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI. Toni Putra Agus Setiawan, Hari Putranto") Putra Agus S, Putranto, Desain Sensorless (Minimum Sensor) Kontrol Motor Induksi 1 Fasa Pada DESAIN SENSORLESS (MINIMUM SENSOR) KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI Toni Putra Agus Setiawan,
Putra Agus S, Putranto, Desain Sensorless (Minimum Sensor) Kontrol Motor Induksi 1 Fasa Pada DESAIN SENSORLESS (MINIMUM SENSOR) KONTROL MOTOR INDUKSI 1 FASA PADA MESIN PERONTOK PADI Toni Putra Agus Setiawan,
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Pendahuluan Bab ini akan membahas pembuatan seluruh perangkat yang ada pada Tugas Akhir tersebut. Secara garis besar dibagi atas dua bagian perangkat yaitu: 1.
BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Pendahuluan Bab ini akan membahas pembuatan seluruh perangkat yang ada pada Tugas Akhir tersebut. Secara garis besar dibagi atas dua bagian perangkat yaitu: 1.
BAB III PERANCANGAN. Pada bab ini akan menjelaskan perancangan alat yang akan penulis buat.
 BAB III PERANCANGAN Pada bab ini akan menjelaskan perancangan alat yang akan penulis buat. Perancangan tersebut mulai dari: blok diagram sampai dengan perancangan rangkaian elektronik, sebagai penunjang
BAB III PERANCANGAN Pada bab ini akan menjelaskan perancangan alat yang akan penulis buat. Perancangan tersebut mulai dari: blok diagram sampai dengan perancangan rangkaian elektronik, sebagai penunjang
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM 3.1 Pengertian Umum Sistem yang dirancang adalah sistem yang berbasiskan mikrokontroller dengan menggunakan smart card yang diaplikasikan pada Stasiun Kereta Api sebagai tanda
BAB III PERANCANGAN SISTEM 3.1 Pengertian Umum Sistem yang dirancang adalah sistem yang berbasiskan mikrokontroller dengan menggunakan smart card yang diaplikasikan pada Stasiun Kereta Api sebagai tanda
III. METODE PENELITIAN. Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Desember 2011
 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Desember 2011 sampai dengan
III. METODE PENELITIAN A. Waktu dan Tempat Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Desember 2011 sampai dengan
BAB III METODE PENELITIAN. Berikut sistem dari modul Hot Plate Magnetic Stirrer dapat dilihat pada
 20 BAB III METODE PENELITIAN 3.1. Sistem Hot Plate Magnetic Stirrer Berikut sistem dari modul Hot Plate Magnetic Stirrer dapat dilihat pada Gambar 3.1. Gambar 3.1 Diagram Blok alat 20 21 Fungsi masing-masing
20 BAB III METODE PENELITIAN 3.1. Sistem Hot Plate Magnetic Stirrer Berikut sistem dari modul Hot Plate Magnetic Stirrer dapat dilihat pada Gambar 3.1. Gambar 3.1 Diagram Blok alat 20 21 Fungsi masing-masing