BAB II LANDASAN TEORI. Remote TV adalah suatu pengontrol, yang fungsinya untuk merubah dan
|
|
|
- Suharto Indradjaja
- 6 tahun lalu
- Tontonan:
Transkripsi
1 BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan hal-hal tersebut, maka landasan teori merupakan bagian yang harus dipahami untuk pembahasan selanjutnya. Pengetahuan yang mendukung perencanaan dan realisasi alat meliputi remote kontrol, mikrokontroler ATMega 8535, sensor TSOP 1738, LCD dan program Remote Kontrol Remote TV adalah suatu pengontrol, yang fungsinya untuk merubah dan meng-set TV yang dapat digunakan untuk merubah saluran TV seperti ingin melihat saluran ( RCTI, SCTV, INDOSIAR, ANTV, TRANS TV, dll ). Adapun untuk meng-set TV tersebut, seperti contoh untuk meng-set dalam VCD atau DVD, semua itu di kontrol oleh Remote TV, yang tentunya semua itu tidak-lah semudah yang dibayangkan, yang hanya menekan tombol Remote, dalam hal pengerjaan Tugas Akhir ini penulis menggunakan Remote TV Sony. Pada remote kontrol terdapat dua bagian yang utama yaitu : bagian transmiter dan bagian receiver. Bagian transmitter dalam hal ini menggunakan remote yang
2
3
4
5
6
7 mikroprosesor, mikrokontroler jauh lebih unggul karena terdapat berbagai alasan, diantaranya : 1. Tersedianya I/O I/O dalam mikrokontroler sudah tersedia sementara pada mikroprosesor dibutuhkan IC tambahan untuk menangani I/O tersebut. IC I/O yang dimaksud adalah PPI Memori Internal Memori merupakan media untuk menyimpan program dan data sehingga mutlak harus ada. Mikroprosesor belum memiliki memori internal sehingga memerlukan IC memori eksternal. Dengan kelebihan-kelebihan di atas, ditambah dengan harganya yang relatif murah sehingga banyak penggemar elektronika yang kemudian beralih kemikrokontroler. Namun demikian, meski memiliki berbagai kelemahan, mikroprosesor tetap digunakan sebagai dasar dalam mempelajari mikrokontroler. Inti kerja dari keduanya adalah sama, yakni sebagai pengendali suatu sistem. Mikrokontroler merupakan komputer di dalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut pengendali kecil dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung
8 seperti IC TTL dan CMOS dapat direduksi / diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini. Dengan menggunakan mikrokontroler ini maka: 1. Sistem elektronik akan menjadi lebih ringkas. 2. Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem adalah perangkat lunak yang mudah dimodifikasi. 3. Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak. Namun demikian tidak sepenuhnya mikrokontroler bisa mereduksi komponen IC TTL dan CMOS yang seringkali masih diperlukan untuk aplikasi kecepatan tinggi atau sekedar menambah jumlah saluran input dan output (I/O). dengan kata lain, mikrokontroler adalah versi mini atau mikro dari sebuah komputer karena mikrokontroler sudah mengandung beberapa bagian yang langsung bisa dimanfaatkan, misalnya port paralel, port serial, komparator, konversi digital ke analog (DAC), konversi analog ke digital (ADC), dan sebagainya hanya menggunakan Minimum System yang tidak rumit atau kompleks. Mikrokontroler adalah otak dari suatu sistem elektronika seperti halnya mikroprosesor sebagai otak komputer. Namun mikrokontroler memiliki nilai tambah karena didalamnya sudah terdapat memori dan sistem input/output dalam suatu kemasan IC. Mikrokontroler AVR (Alf and Vegard s RISC processor) standar memiliki arsitektur 8-bit, dimana semua instruksi dikemas dalam kode 16- bit dan sebagian besar instruksi dieksekusi dalam satu siklus clock. Berbeda dengan instruksi MCS-51 yang membutuhkan 12 siklus clock karena memiliki arsitektur CISC (seperti komputer).
9
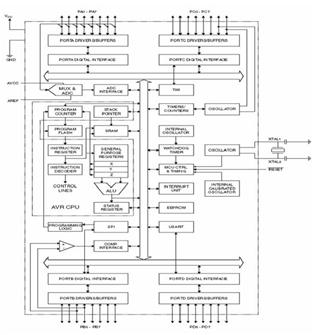
10 Dari gambar tersebut dapat dilihat bahwa ATMega 8535 memiliki bagian sebagai berikut : 1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, Port D. 2. ADC 10 bit sebanyak 8 saluran. 3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register. 5. Watchdog Timer dengan osilator internal. 6. SRAM sebesar 512 byte. 7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 8. Unit interupsi internal dan eksternal. 9. Port antarmuka SPI. 10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11. Antarmuka komparator analog Port USART untuk komunikasi serial. Kapabiltas detail dari ATMega 8535 adalah sebagai berikut : 1. Sistem mikroprosesor 8 bit bebrbasis RISC dengan kecepatan maksimal 16 MHz. 2. Kapabiltas memori flash 8 Kb, SRAM sebesar 512 byte, dan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte. 3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel. 4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps. 5. Enam pilihan mode sleep menghemat penggunaan daya listrik.

11 Gambar 2. 8 Konfigurasi Pin ATMega8535
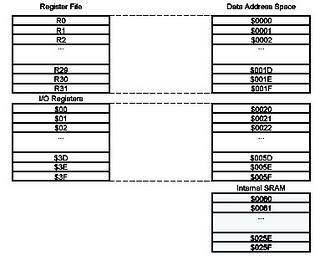
12 Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Timer/Counter, Komparator Analog, dan SPI Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, Komparator Analog, dan Timer Oscilator Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Komparator Analog, Interupsi Iksternal dan komunikasi serial USART Reset merupakan pin yang digunakan untuk mereset mikrokontroler XTAL1 dan XTAL2 merupakan pin masukkan clock eksternal (osilator menggunakan kristal, biasanya dengan frekuensi 11,0592 MHz) Peta Memori ATMega8535 ATMega8535 memiliki dua jenis memori yaitu Program Memory dan Data Memory ditambah satu fitur tambahan yaitu EEPROM Memory untuk penyimpan data Program Memory ATMEGA 8535 memiliki On-Chip In-System Reprogrammable Flash Memory untuk menyimpan program. Untuk alasan keamanan, program memory dibagi menjadi dua bagian, yaitu Boot Flash Section dan Application Flash Section. Boot Flash Section digunakan untuk menyimpan program Boot Loader, yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan.

13 Gambar 2. 9 Peta Memori Program
14
15
16
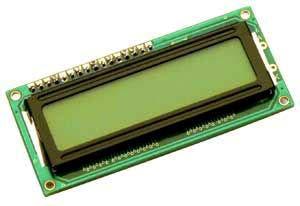
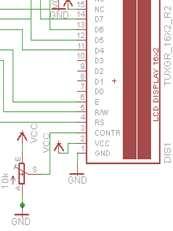
17 ini mengeluarkan logika low atau high pada outputnya, maka mikrokontroler dapat langsung mendeteksinya Liquid Crystal Display (LCD) 2x16 Kegunaan LCD banyak sekali dalam perancangan suatu system dengan menggunakan mikrokontroler. LCD (Liquid Crystal Display) dapat berfungsi untuk menampilkan suatu nilai hasil sensor, menampilkan teks, atau menampilkan menu pada aplikasi mikrokontroler. Pada praktek proyek ini, LCD yang digunakan adalah LCD 16 x 2 yang artinya lebar display 2 baris 16 kolom dengan 16 Pin konektor. Adapun konfigurasi dan deskripsi dari pin-pin LCD antara lain: VCC (Pin 1) Merupakan sumber tegangan +5V. GND 0V (Pin 2) Merupakan sambungan ground. VEE (Pin 3) Merupakan input tegangan Kontras LCD. RS Register Select (Pin 4) Merupakan Register pilihan 0 = Register Perintah, 1 = Register Data. R/W (Pin 5) Merupakan read select, 1 = read, 0 = write.
18
19 2.7. Bahasa Pemograman ATMega8535 Pemrograman mikrokontroler ATmega8535 dapat menggunakan low level Language (assembly) dan high level language (C, Basic, Pascal, JAVA,dll) tergantung compiler yang digunakan (Widodo Budiharto, 2006). Bahasa Assembler mikrokontroler AVR memiliki kesamaan instruksi, sehingga jika pemrograman satu jenis mikrokontroler AVR sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan mikrokontroler jenis mikrokontroler AVR. Namun bahasa assembler relatif lebih sulit dipelajari dari pada bahasa C. Untuk pembuatan suatu proyek yang besar akan memakan waktu yang lama serta penulisan programnya akan panjang. Sedangkan bahasa C memiliki keunggulan dibanding bahasa assembler yaitu independent terhadap hardware serta lebih mudah untuk menangani project yang besar. Bahasa C memiliki keuntungan- keuntungan yang dimiliki bahasa assembler (bahasa mesin), hampir semua operasi yang dapat dilakukan oleh bahasa mesin, dapat dilakukan dengan bahasa C dengan penyusunan program yang lebih sederhana dan mudah. Bahasa C terletak diantara bahasa pemrograman tingkat tinggi dan assembly (Agus Bejo,2007) Dasar Pemrograman ATMega8535 dengan Bahasa C Pendahuluan C adalah bahasa pemrograman yang dapat dikatakan berada antara bahasa tingkat rendah (bahasa yang berorientasi pada mesin) dan bahasa tingkat tinggi (bahasa yang berorientasi pada manusia). Seperti yang diketahui, bahasa tingkat tinggi
20 mempunyai kompatibilitas antara platform. Karena itu, amat mudah untuk membuat program pada berbagai mesin. Berbeda halnya dengan menggunakan bahasa mesin, sebab setiap perintahnya sangat bergantung pada jenis mesin. Pembuat bahasa C adalah Brian W. Kernighan dan Dennis M. Ritchie pada tahun C adalah bahasa pemrograman terstruktur, yang membagi program dalam bentuk blok. Tujuannya untuk memudahkan dalam pembuatan dan pengembangan program. Program yang ditulis dengan bahasa C mudah sekali dipindahkan dari satu jenis program ke bahasa program lain. Hal ini karena adanya standarisasi bahasa C yaitu berupa standar ANSI ( American National Standar Institut) yang dijadikan acuan oleh para pembuat kompiler Pengenal Pada Bahasa C Pengenal merupakan sebuah nama yang didefinisikan oleh program untuk menunjukkan sebuah konstanta, variabel, fungsi, label, atau tipe data khusus. Pemberian pengenal pada program harus memenuhi syarat-syarat di bawah ini: 1. Karakter pertama tidak menggunakan angka; 2. Karakter kedua berupa huruf, angka, garis bawah,; 3. Tidak menggunakan spasi; 4. Bersifat case sensitive, yaitu huruf kapital dan huruf kecil dianggap berbeda; 5. Tidak boleh menggunakan kata-kata yang merupakan sintaks atau operator dari bahasa C.
21 Contoh menggunakan pengenal yang diperbolehkan: 1. Nama 2. _nama 3. Nama2 4. Nama_pengenal Contoh penggunaan pengenal yang tidak diperbolehkan: 1. 2nama 2. Nama+2 3. Nama pengenal Tipe Data Pemberian signed dan unsigned pada tipe data menyebabkan jangkauan dari tipe berubah. Pada unsigned menyebabkan tipe data akan selalu bernilai positif sedangkan signed menyebabkan nilai tipe data bernilai negatif dan memungkinkan data bernilai positif. Perbedaan nilai tipe data dapat kita lihat pada tabel di bawah ini. Tabel 2. 1 Tipe Data Pemodifikasi Tipe Persamaan Jangkauan Nilai Signed char Char -128 s/d 127 Signed int Int s/d Signed short int Short, signed short s/d Signed long int Long, long int, signed long s/d Unsigned char Tidak ada 0 s/d 255 Unsigned int Unsigned 0 s/d
22 Unsigned short int Unsigned short 0 s/d Unsigned long int Unsigned long 0 s/d program, Contoh program yang menunjukkan pengaruh signed dan unsigned pada hasil #include <mega.8535> #include <delay.h> Void main (void) { int a, b; unsigned d, e; // pengenal a = 50; b = 40; d = 50; e = 40; PORTC = 0x00; DDRC = 0Xff; //set PORTC sebagai output PORTB = 0x00; DDRB = 0Xff; // set PORTB sebagai output { }; While(1) PORTB = a b; PORTC = d e; delay_ms(100); } Program di atas akan memberikan data di PORTB = 10 (desimal) sedangkan PORTC = -10 (desimal) karena PORT mikrokontroler tidak dapat mengeluarkan nilai negatif maka PORTB dan PORTC akan memiliki keluaran 0x0A tapi pada kenyataannya PORTC lebih banyak memakan memori karena tanda negatif tersebut disimpan dalam memori.
23 Pada program di atas terdapat tulisan //set PORTB sebagai output yang berguna sebagai komentar yang mana komentar ini tidak mempengaruhi hasil dari program. Ada dua cara penulisan komentar pada pemrograman bahasa C, yaitu dengan mengawali komentar dengan tanda // ( untuk komentar yang hanya satu baris ) dan mengawali komentar dengan tanda /* dan mengakhiri komentar dengan tanda */. Contoh: // ini adalah komentar /* ini adalah komentar Yang lebih panjang Dan lebih panjang lagi */ Header Header digunakan untuk menginstruksikan kompiler untuk menyisipkan file lain. Di dalam file header ini tersimpan deklarasi, fungsi, variable, dan jenis mikrokontroler yang kita gunakan (pada software Code Vision AVR). File-file yang ber akhiran.h disebut file header. File header yang digunakan untuk mendefinisikan jenis mikrokontroler yang digunakan berfungsi sebagai pengarah yang mana pendeklarasian register-register yang terdapat program difungsikan untuk jenis mikrokontroler apa yang digunakan ( pada software Code Vision AVR ). Contoh: #include <mega8535.h> #include<delay.h> #include <stdio. h>
24 Operator Aritmatika Operator aritmatika digunakan untuk melakukan proses perhitungan matematika. Fungsi-fungsi matematika yang terdapat pada bahasa C dapat dilihat pada tabel di bawah ini: Tabel 2. 2 Operator Aritmatika Operator Keterangan + Operator untuk penjumlahan - Operator untuk pengurangan * Operator untuk perkalian / Operator untuk pembagian % Operator untuk sisa bagi Contoh penggunaan operator aritmatika dapat dilihat di bawah ini, #include < mega8535.h> #include <delay.h> void main (void) { unsigned char a, b; a = 0x03; b = 0x05; } DDRC 0XFF; // PORTC digunakan sebagai output while (1) { PORTC = (a * b); delay_ms(500); }
25 Operator Pembanding Operator pembanding digunakan untuk membandingkan 2 data atau lebih. Hasil operator akan di jalankan jika pernyataan benar dan tidak dijalankan jika salah. Operator pembanding dapat kita lihat pada tabel di bawah ini: Tabel 2. 3 Operator Pembanding Operator Contoh Keterangan = = x = = y Benar jika kedua data bernilai sama!= x!= y Bernilai benar jika kedua data tidak sama > x > y Bernilai benar jika nilai x lebih besar dari pada y < x < y Bernilai jika x lebih kecil dari y >= x >= y Bernilai jika x lebih besar atau sama dengan y <= x <= y Bernilai benar jika x lebih kecil atau sama dengan y Operator Logika Operator logika digunakan untuk membentuk logika dari dua pernyataan atau lebih. Operator logika dapat dilihat pada tabel di bawah ini: Tabel 2. 4 Operator Logika Operator Keterangan && Logika AND Logika OR! Logika NOT
26 Contoh program: #include < mega8535.h> #include <delay.h> void main (void) { DDRC = 0XFF; // sebagai output DDRA = 0X00; // sebagai input while (1) { If ( PINA.0 == 1 ) (PINA.1 == 1 ){ PORTC = 0XFF; delay_ms(500); PORTC = 0X00; Delay_ms(500); } else{ PORTC = 0x00; delay_ms(500); } } } Penjelasan program: Apabila PINA.0 atau PINA.1 diberi input logika 1 maka PORTC akan mengeluarkan logika 0xff kemudian logika 0x00 secara bergantian dengan selang waktu 0,5 s. dan apabila bukan PINA.1 atau PINA.0 diberi logika 1 maka PORTC akan mengeluarkan logika 0x Operator Bitwise Operator logika ini bekerja pada level bit. Perbedaan operator bitwise dengan operator logika adalah pada operator logika akan menghasilkan pernyataan benar atau salah sedangkan pada operator bitwise akan menghasilkan data biner. Operator bitwise dapat dilihat pada tabel di bawah ini:
27 Tabel 2. 5 Operator Bitwise Operator Keterangan & Operasi AND level bit Operasi OR level bit ^ Operasi XOR level bit ~ Operator NOT level bit >> Operator geser kanan << Operator geser kiri Contoh program: #include <mega8535.h> #include <delay.h> void main (void) { unsigned char a,b,c; DDRC = 0xff; //portc sebagai output while (1) { } }; a = 0x12; b = 0x34; c = a & b; PORTC = c; delay_ms(500); Penjelasan program: a = 0x12 = b = 0x32 = a & b = 0x10 = Operator Penugasan dan Operator Majemuk Operator ini digunakan untuk memberikan nilai atau manipulasi data sebuah variabel. Operator penguasa dapat kita lihat pada tabel di bawah ini:
28 Tabel 2. 6 Operator Penugasan Operator Keterangan = Memberikan nilai variabel += Menambahkan nilai variabel - = Mengurangi nilai variabel *= Mengalikan nilai variabel /= Membagi nilai variable %= Memperoleh sisa bagi Contoh: a += 2 ; artinya nilai variabel a berubah menjadi a = a + 2 b *= 4; artinya nilai variabel b berubah menjadi b = b * 4 selain operator penugasan di atas juga ada operator penugasan yang berkaitan dengan operator bitwise seperti pada tabel di bawah ini: Tabel 2. 7 Operator Majemuk Operator Contoh Arti &= x &= 1 Variabel x di AND kan dengan 1 = x = 1 Variabel x di OR kan dengan 1 ~= x ~= 1 x = ~ (1) ; x = 0xFE ^= x ^= 1 Variabel x di XOR kan dengan 1 <<= x <<= 1 Variabel x digeser kiri 1 kali >>= x >>= 1 Variabel x digeser kanan 1 kali
29 Operator Penambahan dan Pengurangan Operator ini digunakan untuk menaikkan atau menurunkan nilai suatu variabel dengan selisih 11. Operator ini dapat dilihat pada tabel di bawah ini: Tabel 2. 8 Operator Penambahan dan Pengurangan Operator Keterangan ++ Penambahan 1 pada variable -- Pengurangan Contoh: a = 1; b = 2; a ++; b --; Penjelasan: Maka operator a++ akan mengubah variabel a dari satu menjadi 2, sedangkan operator B akan mengubah variabel b dari 2 menjadi Pernyataan If dan If Bersarang Pernyataan if digunakan untuk pengambilan keputusan terhadap 2 atau lebih pernyataan dengan menghasilkan pernyataan benar atau salah. Jika pernyataan benar maka akan di jalankan instruksi pada blok nya, sedangkan jika pernyataan tidak benar maka instruksi yang pada blok lain yang dijalankan ( sesuai dengan arah programnya).
30 Bentuk pernyataan IF adalah sebagai berikut: 1. Bentuk sederhana if (kondisi){ } Pernyataan_1; Pernyataan_2;...; 2. Pernyataan else if (kondisi) { Pernyataan_1;...; } else { Pernyataan_2;...; } 3. If di dalam if Pernyataan ini sering disebut nested if atau if bersarang. Salah satu bentuknya adalah sebagai berikut: if (kondisi1) Pernyataan_1; else if (kondisi2) pernyataan_2; else if (kondisi3) pernyataan_3; else pernyataan; contoh program: if ( PINA.0 = =1) { PORTC = 0xff; } else { PORTC = 0x00; } Penjelasan program: Jika PINA.0 diberi input logika 1 maka PORTC akan mengeluarkan logika 0xff, jika yang pernyataan yang lain maka PORTC akan mengeluarkan logika 0x00.
31 Pernyataan Switch Pernyataan switch digunakan untuk melakukan pengambilan keputusan terhadap banyak kemungkinana. Bentuk pernyataan switch adalah sebagai berikut : Switch (ekspresi) { case nilai_1 : pernyataa_1;break; case nilai_2 : pernyataan_2;break; case niai_3 : pernyataan_3;break; Defaut : pernyataan_default;break; } Pada pernyataanswitch,masing-masing pernyataan (pernyataan_1 sampai dengan pernyataan_default) dapat berupa satu atau beberapa perintah dan tidak perlu berupa blok pernyataan. Pernyataan_1 akan dikerjakan jika ekspresi bernilai sama dengan nilai_1, pernyataan_2 akan dikerjakan jika ekspresi bernilai sama dengan nilai_2, pernyataan_3 akan dikerjakan jika ekspresi bernilai sama dengan nilai_3 dan seterusnya. Pernyataan_default bersifat opsional, artinya boeh dikerjakan apabila nilai ekspresi tidak ada yang sama satupun dengan salah satu nilai_1, nilai_2, nilai_3 dan seterusnya. Setiap akhir dari pernyataan harus diakhiri dengan break, karena ini digunakan untuk keuar dari pernyataan swich. Contoh : Switch (PINA) { case 0xFE case 0xFD } : PORT=0x00;break; : PORT=0xFF;break; Pernyataan di atas berarti membaca port A, kemudian datanya (PINA) akan dicocokan dengan nilai case. Jika PINA bernilai 0xFE maka data 0x00 akan dikeluarkan ke port C kemudian program keluar dari pernyataan switch tetapi jika
32 PINA bernilai 0xFD maka data 0xFF akan dikeluarkan ke port C kemudian program keluar dari pernyataan switch Pernyatan While Pernyataan while digunakan untuk menguangi sebuah pernyataan atau blok kenyataan secara terus menerus selama kondisi tertentu masih terpenuhi. Bentuk pernyataan while adalah sebagai berikut : while (kondisi) { // sebuah pernyataan atau blok pernyataan } Jika pernyataan yang akan diulang hanya berupa sebuah pernyataan saja maka tanda { dan } bias dihilangkan. Contoh : unsigned char a=0;.. while (a<10) { PORT=a; a++; } Pernyataan di atas akan mengeluarkan data a ke port C secara berulang-ulang. Setiap kali pengulangan nilai a akan bertambah 1 dan setelah niai a mencapai 10 maka pengulangan selesai.
33 Pernyataan Do..While Pernyataan do while hamper sama dengan pernyataan while, yaitu pernyataan yang digunakan untuk menguangi sebuah pernyataan atau blok pernyataan secara terus menerus selama kondisi tertentu masih terpenuhi. Bentuk pernyataan while adalah sebagai berikut : do { // sebuah pernyataan atau b;ok pernyataan } while (kondisi). Yang membedakan antara pernyataan while dengan do..while adalah bahwa pada pernyataan while pengetesan kondisi dilakukan terlebih dahulu, jika kondisi terpenuhi maka barulah blok pernyataan dikerjakan. Sebaliknya pada pernyataan do while blok pernyataan dikerjakan terebih dahulu setelah itu baru diakukan pengetesan kondisi, jika kondisi terpenuhi maka dilakukan pengulangan pernyataan atau blok pernyataan lagi. Sehingga dengan demikian pada pernyataaan do..while blop pernyataan pasti akan dikerjakan minimal satu kali sedangkan pada pernyataan whilebok pernyataan beum tentu dikerjakan Pernyataan For Pernyataan for juga digunakan untuk melakukan pengulangan sebuah pernyataan atau blok pernyataan, tetapi berapa kali jumah pengulangannya dapat ditentukan secara lebih spesifik. Bentuk pernyataan for adalah sebagai berikut : for (nilai_awal ; kondisi ; perubahan) { // sebuah pernyataan atau blok pernyataan }
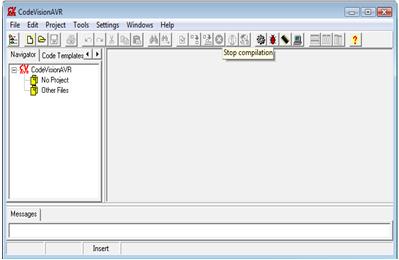
34 Nilai_awal adaah nilai inisial awa sebuah variabel yang didefenisikan terebih dahuu untuk menentukan niai variabel pertama kai sebelum penguangan. Kondisi merupakan pernyataan pengetesan untuk mengontrol pengulangan, jika pernyataan kondisi terpenuhi (benar) maka blok pernyataan akan diulang terus sampai pernyataan kondisi tidak terpenuhi (salah). Perubahan adalah pernyataan yang digunakan untuk melakukan perubahan niai variabel baik naik maupun turun setiap kali pengulangan dilakukan. Contoh : unsigned int a; for ( a=1, a<10, a++) { PORT=a; } Pertama kali nilai a adalah 1, kemudian data a dikeluarkan ke port C. selanjutnya data a dinaikkan (a++) jika kondisi a<10 masih terpenuhi maka data a akan terus dikeluarkan ke port C Software ATMega8535 Editor dan Simulator Software ATMega8535 Editor Instruksi - instruksi yang merupakan bahasa C tersebut dituliskan pada sebuah editor, yaitu Code Vision AVR. Tampilannya seperti berikut ini:
35
36
37
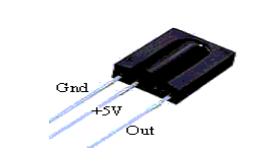
38 Penjelasan dari masing-masing blok adalah sebagai berikut: 1. Fungsi remote sony adalah penghasil clock yang akan di pancar kan mengenai sensor TV. Clok yang dipancarkan berbeda-beda datanya sesuai dengan tombol apa yang di tekan pada remote TV. 2. Sensor TSOP 1738, berfungsi untuk menerima kode-kode scan tombol dari remote TV yang digunakan. 3. ATmega8535 adalah mikrokontroler CMOS 8-bit daya-rendah berbasis arsitektur RISC yang ditingkatkan. Kebanyakan instruksi dikerjakan pada satu siklus clock, ATmega8535 mempunyai throughput mendekati 1 MIPS per MHz membuat disainer sistem untuk mengoptimasi komsumsi daya versus kecepatan proses. 4. Rangkaian driver lampu AC sebagai penggerak dari peralatan listrik (lampu) agar dapat dikontrol oleh mikrokontroller. 5. Lampu Utama dan motor DC (kipas) digunakan sebagai beban yang akan dikontrol oleh remote. 6. Rangkaian driver motor DC sebagai penggerak dari peralatan listrik (kipas) agar dapat dikontrol oleh mikrokontroller. 7. LCD berfungsi untuk menampilkan suatu nilai hasil sensor, menampilkan teks, atau menampilkan menu pada aplikasi mikrokontroler.
39
40
41
42
43
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Teori Dasar Mikrokontroller ATMega8535 Perkembangan teknologi telah maju dengan pesat dalam perkembangan dunia elektronika, khususnya dunia mikroelektronika. Penemuan silicon
BAB II LANDASAN TEORI 2.1 Teori Dasar Mikrokontroller ATMega8535 Perkembangan teknologi telah maju dengan pesat dalam perkembangan dunia elektronika, khususnya dunia mikroelektronika. Penemuan silicon
BAB II LANDASAN TEORI. pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system.
 BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
Dasar Pemrograman Mikrokontroler dengan Bahasa C
 Dasar Pemrograman Mikrokontroler dengan Bahasa C Pokok Bahasan: 1. Penggunaan Fungsi (Using Functions) 2. Penanaman bahasa rakitan di dalam Program 'C' Tujuan Belajar: Setelah mempelajari dalam bab ini,
Dasar Pemrograman Mikrokontroler dengan Bahasa C Pokok Bahasan: 1. Penggunaan Fungsi (Using Functions) 2. Penanaman bahasa rakitan di dalam Program 'C' Tujuan Belajar: Setelah mempelajari dalam bab ini,
BAB 2 TINJAUAN TEORITIS. terdiri dari mikrokontroller ATmega8535, Isd2560, LM 35, Regulator 7805, LCD
 17 BAB 2 TINJAUAN TEORITIS 2.1 Perangkat Keras Perangkat keras merupakan bentuk fisik dari termometer dengan output suara yang terdiri dari mikrokontroller ATmega8535, Isd2560, LM 35, Regulator 7805, LCD
17 BAB 2 TINJAUAN TEORITIS 2.1 Perangkat Keras Perangkat keras merupakan bentuk fisik dari termometer dengan output suara yang terdiri dari mikrokontroller ATmega8535, Isd2560, LM 35, Regulator 7805, LCD
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Mikrokontroler ATMega 8535 Mikrokontroler, sesuai namanya adalah suatu alat atau komponen pengontrol atau pengendali yang berukuran mikro atau kecil. Sebelum ada mikrokontroler,
BAB II LANDASAN TEORI 2.1 Mikrokontroler ATMega 8535 Mikrokontroler, sesuai namanya adalah suatu alat atau komponen pengontrol atau pengendali yang berukuran mikro atau kecil. Sebelum ada mikrokontroler,
MIKROKONTROLER Yoyo Somantri dan Egi Jul Kurnia
 MIKROKONTROLER Yoyo Somantri dan Egi Jul Kurnia Mikrokontroler Mikrokontroler adalah sistem komputer yang dikemas dalam sebuah IC. IC tersebut mengandung semua komponen pembentuk komputer seperti CPU,
MIKROKONTROLER Yoyo Somantri dan Egi Jul Kurnia Mikrokontroler Mikrokontroler adalah sistem komputer yang dikemas dalam sebuah IC. IC tersebut mengandung semua komponen pembentuk komputer seperti CPU,
Pencipta bahasa C adalah Brian W. Kernighan dan Dennis M. Ritchie pada. sekitar tahun C adalah bahasa pemrograman terstruktur, yang membagi
 2.. PerangkatLunak 2.1.1. Pemrograman Bahasa C Pencipta bahasa C adalah Brian W. Kernighan dan Dennis M. Ritchie pada sekitar tahun 1972. C adalah bahasa pemrograman terstruktur, yang membagi program dalam
2.. PerangkatLunak 2.1.1. Pemrograman Bahasa C Pencipta bahasa C adalah Brian W. Kernighan dan Dennis M. Ritchie pada sekitar tahun 1972. C adalah bahasa pemrograman terstruktur, yang membagi program dalam
DASAR PEMROGRAMAN C UNTUK MIKROKONTROLER
 DASAR PEMROGRAMAN C UNTUK MIKROKONTROLER Naskan, Jurusan Teknik Informatika, STMIK AMIKOM Yogyakarta Jl. Ring Road Utara Condong Catur Depok Sleman Yogyakarta Bahasa pemrograman yang dapat digunakan untuk
DASAR PEMROGRAMAN C UNTUK MIKROKONTROLER Naskan, Jurusan Teknik Informatika, STMIK AMIKOM Yogyakarta Jl. Ring Road Utara Condong Catur Depok Sleman Yogyakarta Bahasa pemrograman yang dapat digunakan untuk
BAB 2 LANDASAN TEORI. sensor hall effect. Saat air mengalir melewati rotor, rotor akan berputar.
 BAB 2 LANDASAN TEORI Dari Rangkaian dan Pengujian Sistem Kontrol Aliran Air dengan Mikrokontroler ATMega8535 dan Pemrograman C, ada beberapa bagian yang perlu kita ketahui yaitu : 2.1. Water Flow Sensor
BAB 2 LANDASAN TEORI Dari Rangkaian dan Pengujian Sistem Kontrol Aliran Air dengan Mikrokontroler ATMega8535 dan Pemrograman C, ada beberapa bagian yang perlu kita ketahui yaitu : 2.1. Water Flow Sensor
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Water Flow Sensor G1/2 Water Flow sensor terdiri dari tubuh katup plastik, rotor air, dan sensor hall efek. Ketika air mengalir melalui, gulungan rotor-rotor. Kecepatan perubahan
BAB II LANDASAN TEORI 2.1 Water Flow Sensor G1/2 Water Flow sensor terdiri dari tubuh katup plastik, rotor air, dan sensor hall efek. Ketika air mengalir melalui, gulungan rotor-rotor. Kecepatan perubahan
BAB 2 LANDASAN TEORI. Mikrokontroler AVR (Alf and Vegard s RISC Processor) dari Atmel ini
 dari Atmel ini") BAB 2 LANDASAN TEORI 2.1 Mikrokontroller ATMega 8535 Mikrokontroler AVR (Alf and Vegard s RISC Processor) dari Atmel ini menggunakan arsitektur RISC (Reduced Instruction Set Computing) yang artinya proses
BAB 2 LANDASAN TEORI 2.1 Mikrokontroller ATMega 8535 Mikrokontroler AVR (Alf and Vegard s RISC Processor) dari Atmel ini menggunakan arsitektur RISC (Reduced Instruction Set Computing) yang artinya proses
RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535
 RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535 Masriadi dan Frida Agung Rakhmadi Program Studi Fisika Fakultas Sains dan Teknologi UIN Sunan Kalijaga Jl. Marsda
RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535 Masriadi dan Frida Agung Rakhmadi Program Studi Fisika Fakultas Sains dan Teknologi UIN Sunan Kalijaga Jl. Marsda
II. TINJAUAN PUSTAKA. Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR
 II. TINJAUAN PUSTAKA A. Mikrokontroler ATmega8535 Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR (Alf and Vegard s Risc Processor) yang diproduksi oleh Atmel Corporation.
II. TINJAUAN PUSTAKA A. Mikrokontroler ATmega8535 Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR (Alf and Vegard s Risc Processor) yang diproduksi oleh Atmel Corporation.
III. METODOLOGI PENELITIAN. Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009
 III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
II. TINJAUAN PUSTAKA. menjadi sumber tegangan arus searah yang bersifat variable. Pengubah daya DC-
 II. TINJAUAN PUSTAKA A. Pengenalan DC Chopper Chopper adalah suatu alat yang mengubah sumber tegangan arus searah tetap menjadi sumber tegangan arus searah yang bersifat variable. Pengubah daya DC- DC
II. TINJAUAN PUSTAKA A. Pengenalan DC Chopper Chopper adalah suatu alat yang mengubah sumber tegangan arus searah tetap menjadi sumber tegangan arus searah yang bersifat variable. Pengubah daya DC- DC
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Pengertian Hidroponik Hidroponik merupakan pertanian masa depan sebab hidroponik dapat diusahakan di berbagai tempat, baik di desa, di kota maupun di lahan terbuka, atau di
BAB II TINJAUAN PUSTAKA 2.1 Pengertian Hidroponik Hidroponik merupakan pertanian masa depan sebab hidroponik dapat diusahakan di berbagai tempat, baik di desa, di kota maupun di lahan terbuka, atau di
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1. Sistem Minimum AVR USB Sistem minimum ATMega 8535 yang didesain sesederhana mungkin yang memudahkan dalam belajar mikrokontroller AVR tipe 8535, dilengkapi internal downloader
BAB II LANDASAN TEORI 2.1. Sistem Minimum AVR USB Sistem minimum ATMega 8535 yang didesain sesederhana mungkin yang memudahkan dalam belajar mikrokontroller AVR tipe 8535, dilengkapi internal downloader
Mikrokontroler AVR. Hendawan Soebhakti 2009
 Mikrokontroler AVR Hendawan Soebhakti 2009 Tujuan Mampu menjelaskan arsitektur mikrokontroler ATMega 8535 Mampu membuat rangkaian minimum sistem ATMega 8535 Mampu membuat rangkaian downloader ATMega 8535
Mikrokontroler AVR Hendawan Soebhakti 2009 Tujuan Mampu menjelaskan arsitektur mikrokontroler ATMega 8535 Mampu membuat rangkaian minimum sistem ATMega 8535 Mampu membuat rangkaian downloader ATMega 8535
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 1.1 Penelitian Terdahulu Sebagai bahan pertimbangan dalam penelitian ini akan dicantumkan beberapa hasil penelitian terdahulu : Penelitian yang dilakukan oleh Universitas Islam
BAB II TINJAUAN PUSTAKA 1.1 Penelitian Terdahulu Sebagai bahan pertimbangan dalam penelitian ini akan dicantumkan beberapa hasil penelitian terdahulu : Penelitian yang dilakukan oleh Universitas Islam
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.2.1.1 Sensor Load Cell Prinsip kerja dari sensor tekanan ini adalah mengubah tegangan mekanis menjadi sinyal listrik. Ukuran ketegangan didasarkan pada prinsip bahwa tahanan pengantar
BAB II LANDASAN TEORI 2.2.1.1 Sensor Load Cell Prinsip kerja dari sensor tekanan ini adalah mengubah tegangan mekanis menjadi sinyal listrik. Ukuran ketegangan didasarkan pada prinsip bahwa tahanan pengantar
BAB II LANDASAN TEORI. dikembangkan pada tahun 1996 oleh dua orang mahasiswa Norwegian Institute of
 5 BAB II LANDASAN TEORI 2.1 Mikrokontroler ATmega8535 Atmel AVR adalah jenis mikrokontroller yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Arsitektur mikrokontroler jenis AVR pertama
5 BAB II LANDASAN TEORI 2.1 Mikrokontroler ATmega8535 Atmel AVR adalah jenis mikrokontroller yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Arsitektur mikrokontroler jenis AVR pertama
BAB III MIKROKONTROLER
 BAB III MIKROKONTROLER Mikrokontroler merupakan sebuah sistem yang seluruh atau sebagian besar elemennya dikemas dalam satu chip IC, sehingga sering disebut single chip microcomputer. Mikrokontroler merupakan
BAB III MIKROKONTROLER Mikrokontroler merupakan sebuah sistem yang seluruh atau sebagian besar elemennya dikemas dalam satu chip IC, sehingga sering disebut single chip microcomputer. Mikrokontroler merupakan
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Water Flow Sensor G1/2 Water Flow Sensor ini terdiri terbuat dari plastik dimana didalamnya terdapat rotor dan sensor Hall Effect. Saat air mengalir melewati rotor, rotor akan
BAB II LANDASAN TEORI 2.1 Water Flow Sensor G1/2 Water Flow Sensor ini terdiri terbuat dari plastik dimana didalamnya terdapat rotor dan sensor Hall Effect. Saat air mengalir melewati rotor, rotor akan
BAB 2 TINJAUAN TEORITIS
 BAB 2 TINJAUAN TEORITIS 2.1 Sensor Optocoupler Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter dan receiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya
BAB 2 TINJAUAN TEORITIS 2.1 Sensor Optocoupler Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter dan receiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya
II. TINJAUAN PUSTAKA. kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
 II. TINJAUAN PUSTAKA A. Temperatur dan Kelembaban Temperatur dan kelembaban merupakan aspek yang penting dalam menentukan kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
II. TINJAUAN PUSTAKA A. Temperatur dan Kelembaban Temperatur dan kelembaban merupakan aspek yang penting dalam menentukan kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
MICROCONTROLER AVR AT MEGA 8535
 MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang
MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang
Sistem Minimum Mikrokontroler. TTH2D3 Mikroprosesor
 Sistem Minimum Mikrokontroler TTH2D3 Mikroprosesor MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang memiliki
Sistem Minimum Mikrokontroler TTH2D3 Mikroprosesor MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang memiliki
BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM
 BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM III.1. Analisa Masalah Dalam perancangan sistem otomatisasi pemakaian listrik pada ruang belajar berbasis mikrokontroler terdapat beberapa masalah yang harus
BAB III ANALISIS MASALAH DAN RANCANGAN PROGRAM III.1. Analisa Masalah Dalam perancangan sistem otomatisasi pemakaian listrik pada ruang belajar berbasis mikrokontroler terdapat beberapa masalah yang harus
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 2.1 Mikrokontroler Atmega8535 Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus (Agus Bejo, 2007). Biasanya digunakan untuk pengontrolan otomatis
BAB 2 LANDASAN TEORI 2.1 Mikrokontroler Atmega8535 Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus (Agus Bejo, 2007). Biasanya digunakan untuk pengontrolan otomatis
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Teori Umum Pressure (tekanan) adalah gaya yang diberikan pada per unit area. Bisa juga dijelaskan bahwa pressure adalah ukuran intensitas gaya yang diberikan pada suatu titik
BAB II LANDASAN TEORI 2.1 Teori Umum Pressure (tekanan) adalah gaya yang diberikan pada per unit area. Bisa juga dijelaskan bahwa pressure adalah ukuran intensitas gaya yang diberikan pada suatu titik
BAB II LANDASAN TEORI. ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc
 BAB II LANDASAN TEORI 2.1. Mikrokontroller ATMega 8535 ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc Processor) keluarga ATMega. Mikrokontroller AVR memiliki arsitektur 8 bit, dimana
BAB II LANDASAN TEORI 2.1. Mikrokontroller ATMega 8535 ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc Processor) keluarga ATMega. Mikrokontroller AVR memiliki arsitektur 8 bit, dimana
BAB II DASAR TEORI. mikrokontroler yang berbasis chip ATmega328P. Arduino Uno. memiliki 14 digital pin input / output (atau biasa ditulis I/O, dimana
 BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino Uno R3 adalah papan pengembangan mikrokontroler yang berbasis chip ATmega328P. Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O,
BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino Uno R3 adalah papan pengembangan mikrokontroler yang berbasis chip ATmega328P. Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O,
DAFTAR ISI. Daftar Pustaka P a g e
 DAFTAR ISI Halaman I. DASAR TEORI Mikrokontroler ATmega16 1. Pengertian Mikrokontroler... 2 2. Arsitektur ATmega16... 2 3. Konfigurasi Pena (PIN) ATmega16... 4 4. Deskripsi PIN Mikrokontroler ATmega16...
DAFTAR ISI Halaman I. DASAR TEORI Mikrokontroler ATmega16 1. Pengertian Mikrokontroler... 2 2. Arsitektur ATmega16... 2 3. Konfigurasi Pena (PIN) ATmega16... 4 4. Deskripsi PIN Mikrokontroler ATmega16...
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Robot Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan
BAB II TINJAUAN PUSTAKA 2.1 Robot Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan
Pengenalan Bahasa C. 1. Struktur penulisan program. #include < [library2.h] > #define [nama2] [nilai] ;
![Pengenalan Bahasa C. 1. Struktur penulisan program. #include < [library2.h] > #define [nama2] [nilai] ;](/thumbs/52/30746838.jpg "Pengenalan Bahasa C. 1. Struktur penulisan program. #include < [library2.h] > #define [nama2] [nilai] ;") Pengenalan Bahasa C 1. Struktur penulisan program #include < [library1.h] > #include < [library2.h] > #define [nama1] [nilai] ; #define [nama2] [nilai] ; [global variables] [functions] void main(void)
Pengenalan Bahasa C 1. Struktur penulisan program #include < [library1.h] > #include < [library2.h] > #define [nama1] [nilai] ; #define [nama2] [nilai] ; [global variables] [functions] void main(void)
BAB III PERANCANGAN SISTEM. sebuah alat pemroses data yang sama, ruang kerja yang sama sehingga
 BAB III PERANCANGAN SISTEM 3.1. Blok Diagram Sistem Untuk dapat membandingkan LM35DZ dengan DS18B20 digunakan sebuah alat pemroses data yang sama, ruang kerja yang sama sehingga perbandinganya dapat lebih
BAB III PERANCANGAN SISTEM 3.1. Blok Diagram Sistem Untuk dapat membandingkan LM35DZ dengan DS18B20 digunakan sebuah alat pemroses data yang sama, ruang kerja yang sama sehingga perbandinganya dapat lebih
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Mikrokontroller ATMEGA 8535 Mikrokontroller merupakan sebuah single chip yang didalamnya telah dilengkapi dengan CPU (Central Processing Unit), RAM (Random Acces Memory), ROM
BAB II LANDASAN TEORI 2.1 Mikrokontroller ATMEGA 8535 Mikrokontroller merupakan sebuah single chip yang didalamnya telah dilengkapi dengan CPU (Central Processing Unit), RAM (Random Acces Memory), ROM
MICROCONTROLER AVR AT MEGA 8535
 MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Jenis Mikrokontroler AVR dan spesifikasinya Flash adalah suatu jenis Read Only Memory yang biasanya diisi dengan program
MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Jenis Mikrokontroler AVR dan spesifikasinya Flash adalah suatu jenis Read Only Memory yang biasanya diisi dengan program
BAB III TEORI PENUNJANG. Microcontroller adalah sebuah sistem fungsional dalam sebuah chip. Di
 BAB III TEORI PENUNJANG 3.1. Microcontroller ATmega8 Microcontroller adalah sebuah sistem fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti proccesor, memori (sejumlah kecil RAM, memori
BAB III TEORI PENUNJANG 3.1. Microcontroller ATmega8 Microcontroller adalah sebuah sistem fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti proccesor, memori (sejumlah kecil RAM, memori
TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer
 TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer disusun oleh : MERIZKY ALFAN ADHI HIDAYAT AZZA LAZUARDI JA FAR JUNAIDI 31780 31924
TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer disusun oleh : MERIZKY ALFAN ADHI HIDAYAT AZZA LAZUARDI JA FAR JUNAIDI 31780 31924
BAB 2 TINJAUAN TEORI
 BAB 2 TINJAUAN TEORI 2.1 Sensor Accelerometer Percepatan merupakan suatu keadaan berubahnya kecepatan terhadap waktu. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga percepatan (acceleration).
BAB 2 TINJAUAN TEORI 2.1 Sensor Accelerometer Percepatan merupakan suatu keadaan berubahnya kecepatan terhadap waktu. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga percepatan (acceleration).
INSTRUKSI. TTH2D3 Mikroprosesor
 INSTRUKSI TTH2D3 Mikroprosesor AT Mega 32 pin diagram Port B Port A Port D Port C ATMega32 Pin out & Descriptions Mega32/Mega16 (XCK/T0) PB0 PA0 (ADC0) (T1) PB1 PA1 (ADC1) (INT2/AIN0) PB2 PA2 (ADC2) (OC0/AIN1)
INSTRUKSI TTH2D3 Mikroprosesor AT Mega 32 pin diagram Port B Port A Port D Port C ATMega32 Pin out & Descriptions Mega32/Mega16 (XCK/T0) PB0 PA0 (ADC0) (T1) PB1 PA1 (ADC1) (INT2/AIN0) PB2 PA2 (ADC2) (OC0/AIN1)
Gambar 2.1 Mikrokontroler ATMega 8535 (sumber :Mikrokontroler Belajar AVR Mulai dari Nol)
") BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler Mikrokontroler merupakan keseluruhan sistem komputer yang dikemas menjadi sebuah chip di mana di dalamnya sudah terdapat Mikroprosesor, I/O Pendukung, Memori
BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler Mikrokontroler merupakan keseluruhan sistem komputer yang dikemas menjadi sebuah chip di mana di dalamnya sudah terdapat Mikroprosesor, I/O Pendukung, Memori
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari alat akuisisi data termokopel 8 kanal. 3.1. Gambaran Sistem Alat yang direalisasikan
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari alat akuisisi data termokopel 8 kanal. 3.1. Gambaran Sistem Alat yang direalisasikan
BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN
 BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN Konsep dasar sistem monitoring tekanan ban pada sepeda motor secara nirkabel ini terdiri dari modul sensor yang terpasang pada tutup pentil ban sepeda
BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN Konsep dasar sistem monitoring tekanan ban pada sepeda motor secara nirkabel ini terdiri dari modul sensor yang terpasang pada tutup pentil ban sepeda
BAB II TINJAUAN PUSTAKA. Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam
 BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler ATMega 8535 Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Mikrokontroler AVR ini memiliki arsitektur
BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler ATMega 8535 Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Mikrokontroler AVR ini memiliki arsitektur
BAB II DASAR TEORI. open-source, diturunkan dari Wiring platform, dirancang untuk. memudahkan penggunaan elektronik dalam berbagai
 BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai
BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai
DAFTAR ISI HALAMAN JUDUL... HALAMAN PENGESAHAN P EMBIMBING... HALAMAN PENGESAHAN P ENGUJI... HALAMAN PERSEMBAHAN... HALAMAN MOTTO... KATA PENGANTAR...
 DAFTAR ISI HALAMAN JUDUL... HALAMAN PENGESAHAN P EMBIMBING... HALAMAN PENGESAHAN P ENGUJI... HALAMAN PERSEMBAHAN... HALAMAN MOTTO... KATA PENGANTAR... ABSTRAKSI... TAKARIR... DAFTAR ISI... DAFTAR TABEL...
DAFTAR ISI HALAMAN JUDUL... HALAMAN PENGESAHAN P EMBIMBING... HALAMAN PENGESAHAN P ENGUJI... HALAMAN PERSEMBAHAN... HALAMAN MOTTO... KATA PENGANTAR... ABSTRAKSI... TAKARIR... DAFTAR ISI... DAFTAR TABEL...
BAB II DASAR TEORI. open-source, diturunkan dari Wiring platform, dirancang untuk. software arduino memiliki bahasa pemrograman C.
 BAB II DASAR TEORI 2.1 ARDUINO Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.
BAB II DASAR TEORI 2.1 ARDUINO Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.
BAB II. PENJELASAN MENGENAI System-on-a-Chip (SoC) C8051F Pengenalan Mikrokontroler
 C8051F Pengenalan Mikrokontroler") BAB II PENJELASAN MENGENAI System-on-a-Chip (SoC) C8051F005 2.1 Pengenalan Mikrokontroler Mikroprosesor adalah sebuah proses komputer pada sebuah IC (Intergrated Circuit) yang di dalamnya terdapat aritmatika,
BAB II PENJELASAN MENGENAI System-on-a-Chip (SoC) C8051F005 2.1 Pengenalan Mikrokontroler Mikroprosesor adalah sebuah proses komputer pada sebuah IC (Intergrated Circuit) yang di dalamnya terdapat aritmatika,
Sistem Mikrokontroler FE UDINUS
 Minggu ke 2 8 Maret 2013 Sistem Mikrokontroler FE UDINUS 2 Jenis jenis mikrokontroler Jenis-jenis Mikrokontroller Secara teknis, hanya ada 2 macam mikrokontroller. Pembagian ini didasarkan pada kompleksitas
Minggu ke 2 8 Maret 2013 Sistem Mikrokontroler FE UDINUS 2 Jenis jenis mikrokontroler Jenis-jenis Mikrokontroller Secara teknis, hanya ada 2 macam mikrokontroller. Pembagian ini didasarkan pada kompleksitas
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Solder Listrik Solder listrik digunakan untuk menempelkan timah pada papan PCB dan rangkaian elektronik lainnya. (Santoso, Martinus & Sugiyanto, 2013) Hasil soldering yang baik
BAB II TINJAUAN PUSTAKA 2.1 Solder Listrik Solder listrik digunakan untuk menempelkan timah pada papan PCB dan rangkaian elektronik lainnya. (Santoso, Martinus & Sugiyanto, 2013) Hasil soldering yang baik
BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]
![BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]](/thumbs/58/42409134.jpg "BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]") BAB II DASAR TEORI Dalam bab ini dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan skripsi yang dibuat. Teori-teori yang digunakan dalam pembuatan skripsi ini adalah sensor
BAB II DASAR TEORI Dalam bab ini dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan skripsi yang dibuat. Teori-teori yang digunakan dalam pembuatan skripsi ini adalah sensor
BAB II DASAR TEORI. 2.1 Ethanol
 BAB II DASAR TEORI 2.1 Ethanol Ethanol yang kita kenal dengan sebutan alkohol adalah hasil fermentasi dari tetes tebu. Dari proses fermentasi akan menghasilkan ethanol dengan kadar 11 12 %. Dan untuk menghasilkan
BAB II DASAR TEORI 2.1 Ethanol Ethanol yang kita kenal dengan sebutan alkohol adalah hasil fermentasi dari tetes tebu. Dari proses fermentasi akan menghasilkan ethanol dengan kadar 11 12 %. Dan untuk menghasilkan
Interfacing. Materi 2: AVR Architecture. Disusun Oleh: I Nyoman Kusuma Wardana
 Interfacing Materi 2: AVR Architecture Disusun Oleh: I Nyoman Kusuma Wardana Outline Keluarga Mikrokontroler AVR Arsitektur internal AVR RISC Von Neumann dan Harvard Architecture Atmega16 Workshop Kusuma
Interfacing Materi 2: AVR Architecture Disusun Oleh: I Nyoman Kusuma Wardana Outline Keluarga Mikrokontroler AVR Arsitektur internal AVR RISC Von Neumann dan Harvard Architecture Atmega16 Workshop Kusuma
BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS
 BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS 3.1. Pendahuluan Perangkat pengolah sinyal yang dikembangkan pada tugas sarjana ini dirancang dengan tiga kanal masukan. Pada perangkat pengolah sinyal
BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS 3.1. Pendahuluan Perangkat pengolah sinyal yang dikembangkan pada tugas sarjana ini dirancang dengan tiga kanal masukan. Pada perangkat pengolah sinyal
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan disajikan dalam mekanisme perancangan alat, baik perangkat keras (hardware) ataupun perangkat lunak (software). Tahapan perancangan dimulai dari perancangan blok
BAB III PERANCANGAN ALAT Pada bab ini akan disajikan dalam mekanisme perancangan alat, baik perangkat keras (hardware) ataupun perangkat lunak (software). Tahapan perancangan dimulai dari perancangan blok
TAKARIR. Akumulator Register yang digunakan untuk menyimpan semua proses aritmatika
 TAKARIR AC (Alternating Current) Adalah sistem arus listrik. Sistem AC adalah cara bekerjanya arus bolakbalik. Dimana arus yang berskala dengan harga rata-rata selama satu periode atau satu masa kerjanya
TAKARIR AC (Alternating Current) Adalah sistem arus listrik. Sistem AC adalah cara bekerjanya arus bolakbalik. Dimana arus yang berskala dengan harga rata-rata selama satu periode atau satu masa kerjanya
METODE PENELITIAN. Penelitian ini dilaksanakan pada bulan Februari 2015 sampai dengan bulan Juli
 36 III. METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian ini dilaksanakan pada bulan Februari 2015 sampai dengan bulan Juli 2015. Perancangan, pembuatan dan pengambilan data dilaksanakan di
36 III. METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian ini dilaksanakan pada bulan Februari 2015 sampai dengan bulan Juli 2015. Perancangan, pembuatan dan pengambilan data dilaksanakan di
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Uraian Umum Dalam perancangan alat akses pintu keluar masuk menggunakan pin berbasis mikrokontroler AT89S52 ini, penulis mempunyai pemikiran untuk membantu mengatasi
BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Uraian Umum Dalam perancangan alat akses pintu keluar masuk menggunakan pin berbasis mikrokontroler AT89S52 ini, penulis mempunyai pemikiran untuk membantu mengatasi
Oleh Ilmin Syarif Hidayatullah ( ) Pembimbing : Andi Rahmadiansah, ST, MT
 Pembimbing : Andi Rahmadiansah, ST, MT") RANCANG BANGUN SISTEM HUMAN MACHINE INTERFACE (HMI) PADA MINIPLANT PEMBANGKIT LISTRIK TENAGA MIKROHIDRO SKALA LABORATORIUM Oleh Ilmin Syarif Hidayatullah (2409030025) Pembimbing : Andi Rahmadiansah, ST,
RANCANG BANGUN SISTEM HUMAN MACHINE INTERFACE (HMI) PADA MINIPLANT PEMBANGKIT LISTRIK TENAGA MIKROHIDRO SKALA LABORATORIUM Oleh Ilmin Syarif Hidayatullah (2409030025) Pembimbing : Andi Rahmadiansah, ST,
BAB III PERENCANAAN DAN REALISASI
 BAB III PERENCANAAN DAN REALISASI 3.1 PERANCANGAN UMUM SISTEM Metode untuk pelaksanaan Program dimulai dengan mempelajari system pengukuran tangki air yang akan digunakan. Dari sini dikembangkan apa saja
BAB III PERENCANAAN DAN REALISASI 3.1 PERANCANGAN UMUM SISTEM Metode untuk pelaksanaan Program dimulai dengan mempelajari system pengukuran tangki air yang akan digunakan. Dari sini dikembangkan apa saja
BAB II LANDASAN TEORI
 16 BAB II LANDASAN TEORI 2.1. Sensor Optocoupler Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter dan receiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya
16 BAB II LANDASAN TEORI 2.1. Sensor Optocoupler Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter dan receiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas mengenai proses perancangan mekanik pintu gerbang otomatis serta penyusunan rangkaian untuk merealisasikan sistem alat. Dalam hal ini sensor
BAB III PERANCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas mengenai proses perancangan mekanik pintu gerbang otomatis serta penyusunan rangkaian untuk merealisasikan sistem alat. Dalam hal ini sensor
BAB II TINJAUAN PUSTAKA
 18 BAB II TINJAUAN PUSTAKA 2.1. Mikrokontroler Mikrokontroler adalah suatu mikroposesor plus. Mikrokontroler adalah otak dari suatu sistem elektronika seperti halnya mikroprosesor sebagai otak komputer.
18 BAB II TINJAUAN PUSTAKA 2.1. Mikrokontroler Mikrokontroler adalah suatu mikroposesor plus. Mikrokontroler adalah otak dari suatu sistem elektronika seperti halnya mikroprosesor sebagai otak komputer.
BAB II PENDEKATAN PEMECAHAN MASALAH. Tombol kuis dengan Pengatur dan Penampil Nilai diharapkan memiliki fiturfitur
 6 BAB II PENDEKATAN PEMECAHAN MASALAH A. Tombol Kuis dengan Pengatur dan Penampil Nilai Tombol kuis dengan Pengatur dan Penampil Nilai diharapkan memiliki fiturfitur sebagai berikut: 1. tombol pengolah
6 BAB II PENDEKATAN PEMECAHAN MASALAH A. Tombol Kuis dengan Pengatur dan Penampil Nilai Tombol kuis dengan Pengatur dan Penampil Nilai diharapkan memiliki fiturfitur sebagai berikut: 1. tombol pengolah
BAB II KONSEP DASAR PERANCANGAN
 BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT 3.1 Definisi Perancangan Perancangan adalah proses menuangkan ide dan gagasan berdasarkan teoriteori dasar yang mendukung. Proses perancangan dapat dilakukan dengan cara pemilihan
BAB III PERANCANGAN ALAT 3.1 Definisi Perancangan Perancangan adalah proses menuangkan ide dan gagasan berdasarkan teoriteori dasar yang mendukung. Proses perancangan dapat dilakukan dengan cara pemilihan
BAB 3 PERANCANGAN SISTEM. Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat
 BAB 3 PERANCANGAN SISTEM Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat pengukur tinggi bensin pada reservoir SPBU. Dalam membuat suatu sistem harus dilakukan analisa mengenai
BAB 3 PERANCANGAN SISTEM Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat pengukur tinggi bensin pada reservoir SPBU. Dalam membuat suatu sistem harus dilakukan analisa mengenai
BAB IV HASIL DAN PEMBAHASAN. Setelah pembuatan modul maka perlu dilakukan pendataan melalui proses
 BAB IV HASIL DAN PEMBAHASAN 4.1 Pengujian Dan Pengukuran Setelah pembuatan modul maka perlu dilakukan pendataan melalui proses pengujian dan pengukuran. Tujuan dari pengujian dan pengukuran yaitu mengetahui
BAB IV HASIL DAN PEMBAHASAN 4.1 Pengujian Dan Pengukuran Setelah pembuatan modul maka perlu dilakukan pendataan melalui proses pengujian dan pengukuran. Tujuan dari pengujian dan pengukuran yaitu mengetahui
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini menjelaskan tentang perancangan sistem alarm kebakaran menggunakan Arduino Uno dengan mikrokontroller ATmega 328. yang meliputi perancangan perangkat keras (hardware)
BAB III PERANCANGAN ALAT Pada bab ini menjelaskan tentang perancangan sistem alarm kebakaran menggunakan Arduino Uno dengan mikrokontroller ATmega 328. yang meliputi perancangan perangkat keras (hardware)
APLIKASI SENSOR UGN3505 SEBAGAI PENDETEKSI MEDAN MAGNET
 APLIKASI SENSOR UGN3505 SEBAGAI PENDETEKSI MEDAN MAGNET Oleh: Yulastri Staf Pengajar Elektro Politeknik Negeri Padang ABSTRACT Sensor UGN3505 using hall effect as magnetic field detection and magnet pole.
APLIKASI SENSOR UGN3505 SEBAGAI PENDETEKSI MEDAN MAGNET Oleh: Yulastri Staf Pengajar Elektro Politeknik Negeri Padang ABSTRACT Sensor UGN3505 using hall effect as magnetic field detection and magnet pole.
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada Bab III ini akan diuraikan mengenai perancangan perangkat keras dan perangkat lunak yang digunakan untuk membangun sistem keamanan rumah nirkabel berbasis mikrokontroler
BAB III PERANCANGAN SISTEM Pada Bab III ini akan diuraikan mengenai perancangan perangkat keras dan perangkat lunak yang digunakan untuk membangun sistem keamanan rumah nirkabel berbasis mikrokontroler
BAB III METODE PENELITIAN. Metode penelitian yang digunakan adalah metode eksperimen. Eksperimen
 BAB III METODE PENELITIAN A. METODE PENELITIAN Metode penelitian yang digunakan adalah metode eksperimen. Eksperimen didalamnya termasuk adalah pengambilan data dan membangun sistem kontrol temperatur.
BAB III METODE PENELITIAN A. METODE PENELITIAN Metode penelitian yang digunakan adalah metode eksperimen. Eksperimen didalamnya termasuk adalah pengambilan data dan membangun sistem kontrol temperatur.
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroller 8535 Mikrokontroller adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus. Biasanya digunakan untuk pengontrolan otomatis dan manual pada
BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroller 8535 Mikrokontroller adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus. Biasanya digunakan untuk pengontrolan otomatis dan manual pada
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Helm Helm adalah bagian dari perlengkapan kendaraan bermotor berbentuk topi pelindung kepala yang berfungsi melindungi kepala pemakainya apabila terjadi benturan Helm terbagi
BAB II TINJAUAN PUSTAKA 2.1 Helm Helm adalah bagian dari perlengkapan kendaraan bermotor berbentuk topi pelindung kepala yang berfungsi melindungi kepala pemakainya apabila terjadi benturan Helm terbagi
PERSETUJUAN. Yang bertanda tangan di bawah ini, Dosen Pembimbing Tugas Akhir menyatakan bahwa laporan tugas akhir dari:
 PERSETUJUAN Yang bertanda tangan di bawah ini, Dosen Pembimbing Tugas Akhir menyatakan bahwa laporan tugas akhir dari: Dengan judul: DIAN HAPRIYANTO NST NIM: 082408034 PERANCANGAN DAN PEMBUATAN SISTEM
PERSETUJUAN Yang bertanda tangan di bawah ini, Dosen Pembimbing Tugas Akhir menyatakan bahwa laporan tugas akhir dari: Dengan judul: DIAN HAPRIYANTO NST NIM: 082408034 PERANCANGAN DAN PEMBUATAN SISTEM
BAB II LANDASAN TEORI. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam
 BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
Rancangan Sistem Autofeeder Ikan pada Aquarium Berbasis Mikrokontroler ATMEGA8535
 Rancangan Sistem Autofeeder Ikan pada Aquarium Berbasis Mikrokontroler ATMEGA8535 Dedi Satria Teknik Informatika Universitas Serambi Mekkah dedisatria@serambimekkah.ac.id ABSTRAK Kajian sistem mikrokontroler
Rancangan Sistem Autofeeder Ikan pada Aquarium Berbasis Mikrokontroler ATMEGA8535 Dedi Satria Teknik Informatika Universitas Serambi Mekkah dedisatria@serambimekkah.ac.id ABSTRAK Kajian sistem mikrokontroler
BAB II DASAR TEORI Bentuk Fisik Sensor Gas LPG TGS 2610 Bentuk fisik sensor TGS 2610 terlihat pada gambar berikut :
 BAB II DASAR TEORI 2.1 SENSOR TGS 2610 2.1.1 Gambaran Umum Sensor gas LPG TGS 2610 adalah sebuah sensor gas yang dapat mendeteksi adanya konsentrasi gas LPG di sekitar sensor tersebut. Sensor gas LPG TGS
BAB II DASAR TEORI 2.1 SENSOR TGS 2610 2.1.1 Gambaran Umum Sensor gas LPG TGS 2610 adalah sebuah sensor gas yang dapat mendeteksi adanya konsentrasi gas LPG di sekitar sensor tersebut. Sensor gas LPG TGS
BAB 3 PERANCANGAN ALAT DAN PEMBUATAN SISTEM
 27 BAB 3 PERANCANGAN ALAT DAN PEMBUATAN SISTEM 3.1. Diagram Blok Sistem Diagram merupakan pernyataan hubungan yang berurutan dari satu atau lebih komponen yang memiliki satuam kerja tersendiri dan setiap
27 BAB 3 PERANCANGAN ALAT DAN PEMBUATAN SISTEM 3.1. Diagram Blok Sistem Diagram merupakan pernyataan hubungan yang berurutan dari satu atau lebih komponen yang memiliki satuam kerja tersendiri dan setiap
BAB II Tinjauan Pustaka
 BAB II Tinjauan Pustaka 2.1 Batterai Baterai sebagai sumber arus listrik searah (DC) dapat dikelompokkan menjadi dua macam, yaitu baterai elemen kering dan elemen basah. Baterai dapat disebut juga dengan
BAB II Tinjauan Pustaka 2.1 Batterai Baterai sebagai sumber arus listrik searah (DC) dapat dikelompokkan menjadi dua macam, yaitu baterai elemen kering dan elemen basah. Baterai dapat disebut juga dengan
MIKROKONTROLER AT89S52
 MIKROKONTROLER AT89S52 Mikrokontroler adalah mikroprosessor yang dirancang khusus untuk aplikasi kontrol, dan dilengkapi dengan ROM, RAM dan fasilitas I/O pada satu chip. AT89S52 adalah salah satu anggota
MIKROKONTROLER AT89S52 Mikrokontroler adalah mikroprosessor yang dirancang khusus untuk aplikasi kontrol, dan dilengkapi dengan ROM, RAM dan fasilitas I/O pada satu chip. AT89S52 adalah salah satu anggota
BAB III DESKRIPSI MASALAH
 BAB III DESKRIPSI MASALAH 3.1 Perancangan Hardware Perancangan hardware ini meliputi keseluruhan perancangan, artinya dari masukan sampai keluaran dengan menghasilkan energi panas. Dibawah ini adalah diagram
BAB III DESKRIPSI MASALAH 3.1 Perancangan Hardware Perancangan hardware ini meliputi keseluruhan perancangan, artinya dari masukan sampai keluaran dengan menghasilkan energi panas. Dibawah ini adalah diagram
BAB III PERANCANGAN DAN PEMBUATAN
 BAB III PERANCANGAN DAN PEMBUATAN 3.1. Diagram Blok Sistem Suplly Display Card RF RFID Atmega328 Buzzer Driver motor Motor Gambar 3.1 Diagram blok system 3.1.1. Fungsi-fungsi diagram blok 1. Blok card
BAB III PERANCANGAN DAN PEMBUATAN 3.1. Diagram Blok Sistem Suplly Display Card RF RFID Atmega328 Buzzer Driver motor Motor Gambar 3.1 Diagram blok system 3.1.1. Fungsi-fungsi diagram blok 1. Blok card
BAB II LANDASAN TEORI. mahluk hidup diantaranya sebagai air minum atau keperluan rumah tangga
 5 BAB II LANDASAN TEORI 2.1 Dasar Teori Air merupakan faktor penting dalam pemenuhan kebutuhan vital bagi mahluk hidup diantaranya sebagai air minum atau keperluan rumah tangga lainnya. Air yang digunakan
5 BAB II LANDASAN TEORI 2.1 Dasar Teori Air merupakan faktor penting dalam pemenuhan kebutuhan vital bagi mahluk hidup diantaranya sebagai air minum atau keperluan rumah tangga lainnya. Air yang digunakan
BAB 3 PERANCANGAN ALAT. Sensor Utrasonik. Relay. Relay
 BAB 3 PERANCANGAN ALAT 3.1 Diagram Blok Berikut ini adalah diagram blok sistem rancang bangun alat pengontrol volume air dan aerator pada kolam budidaya udang menggunakan mikrokontroler. Sensor Utrasonik
BAB 3 PERANCANGAN ALAT 3.1 Diagram Blok Berikut ini adalah diagram blok sistem rancang bangun alat pengontrol volume air dan aerator pada kolam budidaya udang menggunakan mikrokontroler. Sensor Utrasonik
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI PLC (Programable Logic Control) adalah kontroler yang dapat diprogram. PLC didesian sebagai alat kontrol dengan banyak jalur input dan output. Pengontrolan dengan menggunakan PLC
BAB II LANDASAN TEORI PLC (Programable Logic Control) adalah kontroler yang dapat diprogram. PLC didesian sebagai alat kontrol dengan banyak jalur input dan output. Pengontrolan dengan menggunakan PLC
BAB III METODE PENELITIAN. baik pada perangkat keras maupun pada komputer. Buffer. Latch
 BAB III METODE PENELITIAN Metode penelitian yang digunakan dalam perancangan perangkat keras adalah studi kepustakaan berupa data-data literatur dari masing-masing komponen, informasi dari internet dan
BAB III METODE PENELITIAN Metode penelitian yang digunakan dalam perancangan perangkat keras adalah studi kepustakaan berupa data-data literatur dari masing-masing komponen, informasi dari internet dan
BAB II DASAR TEORI. mikrokontroler yang berbasis chip ATmega328P. Arduino Uno. memiliki 14 digital pin input / output (atau biasa ditulis I/O,
 BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino Uno R3 adalah papan pengembangan mikrokontroler yang berbasis chip ATmega328P. Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O,
BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino Uno R3 adalah papan pengembangan mikrokontroler yang berbasis chip ATmega328P. Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O,
BAB II KAJIAN PUSTAKA. Karya Tulis Ilmiah milik Siswi Tri Utami, mahasiswa Politeknik
 BAB II KAJIAN PUSTAKA 1.1 Penelitian Hotplate Terdahulu Karya Tulis Ilmiah milik Siswi Tri Utami, mahasiswa Politeknik Muhammadiyah Yogyakarta Jurusan Teknik Elektromedik Tahun 2014. Dengan judul Hotplate
BAB II KAJIAN PUSTAKA 1.1 Penelitian Hotplate Terdahulu Karya Tulis Ilmiah milik Siswi Tri Utami, mahasiswa Politeknik Muhammadiyah Yogyakarta Jurusan Teknik Elektromedik Tahun 2014. Dengan judul Hotplate
BAB II TINJAUAN PUSTAKA
 4 BAB II TINJAUAN PUSTAKA 2.1 Lemari Barang Barang adalah benda. Lemari adalah perkakas rumah, tempat menyimpan pakaian dan sebagainya(hamzah Ahmad, Nanda Santoso:1996:44, 222). Merujuk dari referensi
4 BAB II TINJAUAN PUSTAKA 2.1 Lemari Barang Barang adalah benda. Lemari adalah perkakas rumah, tempat menyimpan pakaian dan sebagainya(hamzah Ahmad, Nanda Santoso:1996:44, 222). Merujuk dari referensi
BAB III METODE PENELITIAN. oleh karenanya akan dibuat seperti pada Gambar 3.1.
 BAB III METODE PENELITIAN 3.1 Model Penelitian Agar mendapatkan hasil yang diinginkan maka diperlukan suatu rancangan agar dapat mempermudah dalam memahami sistem yang akan dibuat, oleh karenanya akan
BAB III METODE PENELITIAN 3.1 Model Penelitian Agar mendapatkan hasil yang diinginkan maka diperlukan suatu rancangan agar dapat mempermudah dalam memahami sistem yang akan dibuat, oleh karenanya akan
BAB III ANALISIS DAN DESAIN SISTEM
 BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan robot pengantar makanan berbasis mikrokontroler ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan
BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan robot pengantar makanan berbasis mikrokontroler ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan
BAB 3 PERANCANGAN ALAT. Rangkaian Catu daya (Power Supply Adaptor) ini terdiri dari satu keluaran, yaitu 5
 ini terdiri dari satu keluaran, yaitu 5") BAB 3 PERANCANGAN ALAT 3.1. Perancangan Rangkaian Catu Daya Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian Catu daya (Power Supply Adaptor) ini terdiri dari
BAB 3 PERANCANGAN ALAT 3.1. Perancangan Rangkaian Catu Daya Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian Catu daya (Power Supply Adaptor) ini terdiri dari
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Landasan Teori Jurnal Berikut adalah beberapa penelitian yang sudah dilakukan sebelumnya terkait dengan penelitian yang saya lakukan : Sibarani, Herbert, Jurusan Teknik Elektro
BAB II TINJAUAN PUSTAKA 2.1 Landasan Teori Jurnal Berikut adalah beberapa penelitian yang sudah dilakukan sebelumnya terkait dengan penelitian yang saya lakukan : Sibarani, Herbert, Jurusan Teknik Elektro
BAB II TINJAUAN PUSTAKA. [10]. Dengan pengujian hanya terbatas pada remaja dan didapatkan hasil rata-rata
![BAB II TINJAUAN PUSTAKA. [10]. Dengan pengujian hanya terbatas pada remaja dan didapatkan hasil rata-rata](/thumbs/78/77792009.jpg "BAB II TINJAUAN PUSTAKA. [10]. Dengan pengujian hanya terbatas pada remaja dan didapatkan hasil rata-rata") BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Sebelumnya pernah dilakukan penelitian terkait dengan alat uji kekuatan gigit oleh Noviyani Agus dari Poltekkes Surabaya pada tahun 2006 dengan judul penelitian
BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Sebelumnya pernah dilakukan penelitian terkait dengan alat uji kekuatan gigit oleh Noviyani Agus dari Poltekkes Surabaya pada tahun 2006 dengan judul penelitian
RANCANG BANGUN ALAT PENGHITUNG BIJI TANAMAN PANGAN BERBASIS MIKROKONTROLER. Dosen Jurusan Teknik Informatika STMIK Pradnya Paramitha Malang
 RANCANG BANGUN ALAT PENGHITUNG BIJI TANAMAN PANGAN BERBASIS MIKROKONTROLER Prayitno Surip1), Mahmud Yunus2), Dian Wahyuningsih3) Mahasiswa Jurusan Teknik Informatika, STMIK Pradnya Paramitha Malang 2)
RANCANG BANGUN ALAT PENGHITUNG BIJI TANAMAN PANGAN BERBASIS MIKROKONTROLER Prayitno Surip1), Mahmud Yunus2), Dian Wahyuningsih3) Mahasiswa Jurusan Teknik Informatika, STMIK Pradnya Paramitha Malang 2)