Oleh : Michael.P.O.F Manalu NRP : Dosen Pembimbing : Dr Unggul Wasiwitono, ST, M.Eng
|
|
|
- Johan Sasmita
- 6 tahun lalu
- Tontonan:
Transkripsi


1 Oleh : Michael.P.O.F Manalu NRP : Dosen Pembimbing : Dr Unggul Wasiwitono, ST, M.Eng





2 SAFETY COMFORT SAFETY


3



4 PLANAR GERAK BELOK ACKERMAN ANALISA KINEMATIK PADA SISTEM KEMUDI FAKTA SPATIAL
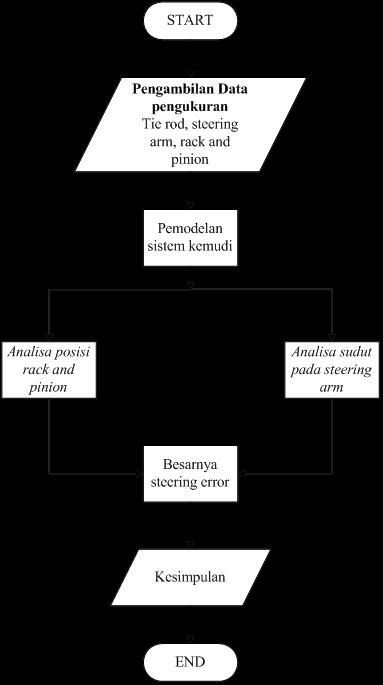
5 Analisa yang dilakukan adalah analisa posisi khususnya perubahan sudut roda terhadap perpindahan Rack Sudut belok yang diamati sampai 30 0 Analisa dilakukan dengan menambahkan sudut chamber negatif (10 derajat)
6 MENGANALISA KINEMATIKA SPATIAL SISTEM RACK AND PINION MEMBANDINGKAN HASIL ANALISA SPATIAL DENGAN PENELITI SEBELUMNYA YANG MENGGUNAKAN ANALISA KINEMATIK PLANAR MENGANALISA PENGARUH PENEMPATAN RACK, DAN SUDUT STEERING ARM TERHADAP STEERING ERROR
7 Dasar pemikiran dari penelitian ini dapat dijadikan pertimbangan dan refrensi dalam pembuatan sistem kemudi Dapat digunakan dalam pengembangan ilmu pengetahuan yang selanjutnya. Sebagai acuan dalam mere-design mobil GEA



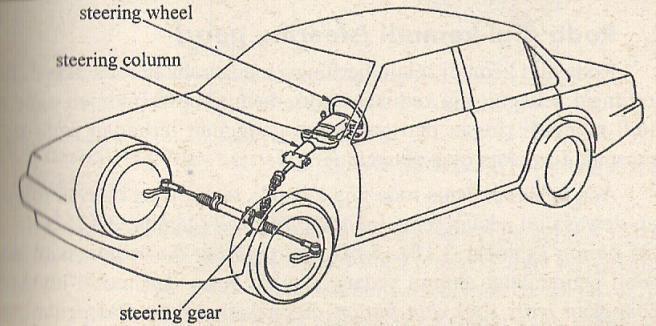
8 Steering Wheel Tenaga putar dari tangan pengemudi pertama kali disalurkan ke steering wheel Steering Gear Memperbesar momen putar yang diterima agar roda depan agar digerakkan dengan mudah Steering Colomn Berfungsi sebagai penerus momen yang dihasilkan dari steering wheel Steering linkage Sebagai penerus untuk menggerakan roda depan

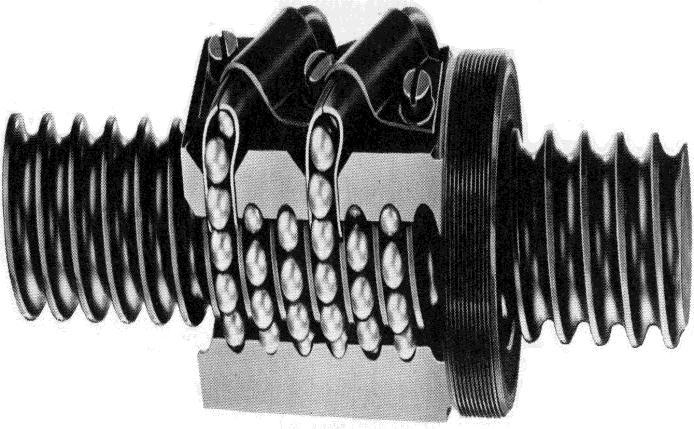
9 Rack And pinion RECIRCULATING BALL Perinsip kerja adalah bila roda kemudi diputar, maka gerakan ini Perinsip kerja akan adalah diteruskan waktu roda ke worm kemudi diputar, shaft/poros pinion cacing, pun sehingga ikut nut berputar. kemudi Gerakan akan bergerak ini akan mendatar menggerakkan ke kiri rack atau dari kanan. samping Sementara ke nut samping dan bergerak, dilanjutkan sektor melalui shaft juga tie akan rod ke lengan ikut nakel berputar ( steering menggerakkan arm) pada roda-roda pitman depan. arm yang Dari putaran diteruskan ke kemudi inilah roda salah depan satu roda melalui depan batangbatang yang kemudi/steering satu roda tertarik linkage didorong dan sehingga akan membuat arah belok yang sesuai dengan pengemudi pada putaran roda yang sama
10 Felzien and Cronim, 1982 Pengaruh steering error yang terjadi pada kendaraan yang dilakukan oleh Felzien and Cronim tidak hanyak melibatkan rack and pinion, steering arm maupun tie rod. Penelitian yang dilakukan dengan melihat adanya pengaruh suspensi depan Mac Pherson terhadap steering error pada gerak belok kendaraan. Pengaruh suspensi itu sendiri sangat berhubungan dengan kondisi jalan yang dilewati kendaraan. Pembuktian yang dilakukan Felzien and Cronim pada saat kendaraan melewati suatu jalan yang tidak rata dimana salah satu ban depan terangkat. Adanya ketidakseimbangan antara roda kiri dan kanan tersebut akan membentuk sudut tertentu yang akan membuat kondisi ackerman sulit untuk di dekati. Perbedaan sudut yang terbentuk inilah yang menyebabkan kondisi steering error dapat terjadi. Optimasi masalah ini dilakukan Felzien and Cronim dengan cara analisa kinematik planar dan memodifikasi geometri suspensi terhadap constrain yang ada sehingga kondisi ideal dapat di dekati.
11 A Rahmani Hanzaki,dkk 2007 Dalam paper penelitian ini A Rahmani Hanzaki menjelaskan tentang kombinasi kinematik dengan optimasi sensitivitas pada pergerakan rack and pinion. Penelitian yang dilakukan teteap sama yaitu untuk meminimalisasi steering error pada kendaraan. Hal pertama yang dilakukan tentu tidak jauh berbeda dengan yang dilakukan peneliti sebelumnya yaitu dengan melakukan analisa kinematik planar pada sistem kemudi tersebut. A Rahmani Hanzaki itu sendiri menambahkan setelah melakukan analisa kinematik maka perlu dilakukan analisa sensitifitas untuk memprediksi bagaimana steering error dapat terjadi oleh manufacturing toleransi, assembly error dan clearence resulting yang disebabkan karena pemakaian. Pada saat analisa kinematik yang dilakukan mempunyai pengaruh terhadap sensitifitas dari parameter tersebut maka untuk meminimalkan steering error kedua cara tersebut harus bisa dipadukan.
12 M.Ashadi Fitrawan, 2012 analisa kinematis terhadap steering linkage dengan variasi posisi rack and pinion pada bidang horizontal dengan mengubah panjang tie rod tanpa variasi steering arm dan pergerakan rack and pinion untuk mendapatkan steering geometry yang dapat meminimalkan error dengan acuan kondisi gerak Ackerman. Dalam hal ini juga dianalisa stabilitas kendaraan dengan variable kecepatan, sudut belok terhadap beban muatan dan posisi muatan. Analisis dilakukan dengan melakukan perumusan pada sudut slip dan understeer index, sehingga dapat diketahui kondisi kendaraan tersebut akan mengalami understeer atau oversteer
13 U.Wasiwitono dkk,2012,analisa kinematis terhadap sistem kemudi tipe rack and pinion dengan meminimalkan steering error dengan variasi terhadap steering arm dan rack placement. Bagaimana pengaruh variasi panjangnya rack displacement untuk mendapatkan sudut belok dengan steering error yang paling minimum pada saat kendaraan melakukan manuver. Acuan dari sudut belok ideal pada penelitian adalah prinsip gerak belok ideal ackerman

14 Understeer sudut KONDISI slip rata-rata IDEAL roda depan lebih besar dari pada sudut slip rata-rata roda belakang (α r < α f ) KONDISI NYATA Oversteer Sudut slip rata-rata roda belakang lebih besar dibandingkan dengan sudut slip rata-rata roda depan (α f < α r )





15 PENEMPATAN RACK AND PINION PANJANG TIE ROD SUDUT STEERING ARM
16
17

18 Dimensi untuk sistem kemudi
19 AKTUAL Asumsi kendaraan berbelok ke kanan Maka δi=δr dan δ0=δl
20 Merupakan nilai Steering error yang dirumuskan dengan rumus : Jika di plot dalam grafik dengan asumsi kendaraan tetap berbelok ke kanan maka
21 Posisi semula 41 0,4 77, , , ,6461 0,7439 1,3442 1,8423 0, ,4926 3,6060 time δo δi tan δi cot δi cot δi+wb 1/cot δi+wb δoa SE , , ,01 109,1624 0, ,1943 0,0143 0, , ,1959 0,0002 0, ,02 109,11 0, ,2467 0,0667 0, , ,5049 0,0012 0,0667 0, ,03 109,0225 0, ,3342 0,1542 0, , ,0652 0,0027 0,1540 0, ,04 108,8999 0, ,457 0,277 0, , ,3405 0,0048 0,2763 0, ,05 108,7421 0, ,6152 0,4352 0, , ,1495 0,0076 0,4336 0, ,06 108,549 0, ,8091 0,6291 0, , ,5702 0,0109 0,6257 0, ,07 108,3204 0, ,039 0,859 0, , ,1937 0,0149 0,8526 0, ,08 108,0562 1, ,3053 1,1253 0, , ,4076 0,0195 1,1144 0, ,09 107,756 1, ,6084 1,4284 0, , ,6016 0,0246 1,4109 0, ,1 107,4197 1, ,9489 1,7689 0, , ,8784 0,0304 1,7421 0, ,11 107,0469 2, ,3274 2,1474 0, , ,1671 0,0368 2,1081 0, ,12 106,6374 2, ,7444 2,5644 0, , ,8259 0,0438 2,5085 0, ,13 106,1908 2, ,2008 3,0208 0, , ,4476 0,0514 2,9436 0, ,14 105,7067 3, ,6973 3,5173 0, , ,7673 0,0596 3,4131 0, ,15 105,1847 3, ,2349 4,0549 0, , ,6045 0,0685 3,9170 0, ,16 104,6242 4, ,8146 4,6346 0, , ,8337 0,0779 4,4555 0, ,17 104,0248 5, ,4374 5,2574 0, , ,3656 0,0880 5,0282 0, ,18 103,386 5, ,1045 5,9245 0,1038 9, ,1346 0,0987 5,6352 0, ,19 102,707 6, ,8173 6,6373 0,1164 8,5937 9,0918 0,1100 6,2767 0, ,2 101,9872 7, ,5772 7,3972 0,1298 7,7025 8,2006 0,1219 6,9524 0, ,21 101,2259 7, ,3857 8,2057 0,1442 6,9346 7,4327 0,1345 7,6626 0, ,22 100,4222 8, ,2446 9,0646 0,1595 6,2680 6,7661 0,1478 8,4072 0, ,23 99, , ,1558 9,9758 0,1759 5,6853 6,1834 0,1617 9,1865 0, ,24 98, , , ,9412 0,1933 5,1729 5,6710 0, ,0005 0, ,25 97, , , ,9633 0,2119 4,7195 5,2176 0, ,8497 0, ,26 96, , , ,0444 0,2317 4,3162 4,8143 0, ,7343 0, ,27 95, , , ,1873 0,2528 3,9556 4,4537 0, ,6547 0, ,28 94, , ,575 15,395 0,2754 3,6317 4,1298 0, ,6117 0, ,29 93, , , ,6708 0,2995 3,3394 3,8375 0, ,6058 1, ,3 92, , , ,0184 0,3253 3,0743 3,5724 0, ,6381 1, ,31 91, , , ,4418 0,3530 2,8331 3,3312 0, ,7096 1, ,32 89, , , ,9457 0,3828 2,6125 3,1106 0, ,8217 1, ,33 88, , , ,5351 0,4149 2,4100 2,9081 0, ,9762 1, ,34 87, , , ,2157 0,4497 2,2235 2,7216 0, ,1751 1, ,35 85,571 23, , ,9939 0,4876 2,0509 2,5490 0, ,4209 2, ,36 84, , , ,8771 0,5290 1,8905 2,3886 0, ,7169 2, ,37 82, , , ,8736 0,5744 1,7409 2,2390 0, ,0668 2, ,38 80, , , ,9929 0,6247 1,6008 2,0989 0, ,4753 2, ,39 78, , , ,2461 0,6808 1,4689 1,9670 0, ,9481 3,2895
22 Actual VS Ackerman δl aktual ackerman δr Steering Error Error lebih kecil Steering Error Steering Error δr
23 Dengan menaikkan dan menurunkan sejauh 1-5 cm, maka didapatkan besarnya stering error
24 Steering error (SE) - degree SE dengan perpindahan rack (sumbu "y") δ r (degree) (+) 1 cm (+) 2 cm (+) 3 cm (+) 4 cm (+) 5 cm (-) 1 cm (-) 2 cm (-) 3 cm (-) 4 cm (-) 5 cm posisi awal Menghasilkan steering error terkecil yaitu pada posisi rack diturunkan (-y) sejauh 5 cm yaitu Menyebabkan perubahan pada dimensi tie rod menjadi cm
25 Steering error (SE) - degree SE dengan penempatan rack (sumbu "Z") δ r (degree) (+) 1 cm (+) 2 cm (+) 3 cm (+) 4 cm (+) 5 cm (-) 1 cm (-) 2 cm (-) 3 cm (-) 4 cm (-) 5 cm posisi awal Perlakuan sama dengan menggeser rack terhadap sumbu z sejauh 1-5 cm dan menghasilkan perbedaan steering error yang sangat kecil dari posisi semula yaitu sebesar perubahan dimensi dari tie rod menjadi 36,748 cm.
 5 cm dan dimajukan (z) 5 cm.")
26 Untuk variasi terhadap sudut steering arm ini diambil posisi rack yang memberikan nilai error minimum sebelumnya, yaitu diturunkan (-y) 5 cm dan dimajukan (z) 5 cm. Untuk sudut steering arm itu sendiri sebesar 1-5 derajat
27 Steerirng Error (SE) SE variasi sudut θ l δ r (degree) (+) 1 cm (+) 2 cm (+) 3 cm (+) 4 cm (+) 5 cm (-) 1 cm (-) 2 cm (-) 3 cm (-) 4 cm (-) 5 cm Posisi awal Terlihat pada gambar nilai yang memiliki nilai steering error terkecil ketika steering arm dibesarkan sebesar 5 derajat menjadi dan mempunyai nilai 0, Untuk perubahan panjang tie rod menjadi cm
28 Steerirng Error (SE) Steering Error δ r (degree) Posisi semula (+) 1 cm (+) 2 cm (+) 3 cm posisi rack minimum Dari gambar terlihat tren grafik untuk caster berhimpit dengan sudut chamber hal ini dapat dikatakan pengaruh caster terhadap chamber sangat kecil Tetapi jika dibandingkan dengan posisi rack yang memberikan steering error minimum, pengaruh chamber dan caster ini sangat besar dengan steering error.
29 Dari analisis yang telah dilakukan, dapat diambil beberapa kesimpulan sebagai berikut: Pada analisa kinematis spatial pada sistem kemudi ini, jarak rack ke sumbu axis roda (h), panjang tie rod (la) sudut steering arm (θ) sudut chamber dan posisi ban merupakan faktor yang berpengaruh terhadap steering error (SE). Penembatan rack lebih dekat dengan sumbu axis roda menambah panjang tie rod dan memperbesar sudut steering arm dapat meminimalkan steering eror. Dari hasil variasi h terhadap sudut axis roda didapatkan nilai steering error minimum sebesar dengan menghasilkan spesifikasi baru sebesar Tie rod (lt) = cm, Jarak rack ke sumbu axis roda (h) = 97 cm,maksimum sudut belok rata rata roda depan (sudut inner) = Dari hasil variasi h yang memberikan nilai Steering error minimum yang divariasikan lagi terhadap steering arm didapatkan posisi steering arm dinaikkan sejauh 5 cm dan mendapatkan panjang tie rod cm Pengaruh variasi posisi ban (Caster) dengan chamber 10 0 memberikan pengaruh yang kecil terhadap steering error, akan tetapi pengaruh tersebut akan besar jika dibandingkan dengan posisi rack yang memebrikan nilai error minimum.
30 1. Sutantra, I. Nyoman, Teknologi Otomotif, Teknik Mesin ITS, Surabaya, M.L Felzien and D.L. Cronin Steering Error Optimization of the MacPherson Strut Automotive Front Suspension, Mech. Mach. Theory P.A. Simionescu, M.R. Smith, Initial Estimates In The Design of Rack and Pinion Steeering Linkage, ASME J Mech, A.Rahmani Hanzaki, P.V.M. Rao, S.K. Saha, Kinematic and Sensitivity Analysis and Optimization of Planar Rack adn Pinion Steering Linkages. Mechanism and Machine Theory, 44:42-56, A.Rahmani Hanzaki, P.V.M. Rao, S.K. Saha, Modeling of Rack And Pinion Steering Linkage using Multibody Dynamic. In 12th IFToMM World Congress, Besancon(France), June M.Ashadi Fitrawan, Analisa Steering Linkage pada INKA GEA dan stabilitas dengan variable kecepatan, sudut belok terhadap beban muatan dan posisi muatan. Tugas Akhir Teknik Mesin ITS 7. Harmes Bastian Tampubolon, Analisa Planar Kinematika Mekanisme Sistem Kemudi Kendaraan Tipe Rack and Pinion. Tugas Akhir Teknik Mesin ITS
31
Analisa Kinematik Secara Spatial Untuk Rack and Pinion pada Kendaraan Hybrid Roda Tiga Sapujagad 2
 JURNAL TEKNIK POMITS Vol. 1, No. 2, (214) ISSN: 231-9271 1 Analisa Kinematik Secara Spatial Untuk Rack and Pinion pada Kendaraan Hybrid Roda Tiga Sapujagad 2 Fachri Nugrahasyah Putra dan Unggul Wasiwitono
JURNAL TEKNIK POMITS Vol. 1, No. 2, (214) ISSN: 231-9271 1 Analisa Kinematik Secara Spatial Untuk Rack and Pinion pada Kendaraan Hybrid Roda Tiga Sapujagad 2 Fachri Nugrahasyah Putra dan Unggul Wasiwitono
Analisa Kinematik secara spatial untuk Rack and pinion pada Kendaraan hybrid roda 3 Sapujagad 2
 Analisa Kinematik secara spatial untuk Rack and pinion pada Kendaraan hybrid roda 3 Sapujagad 2 Oleh : Fachri Nugrahasyah Putra Nrp : 2108100107 Dosen Pembimbing : Dr. Unggul Wasiwitono, ST, M.Eng Keamanan
Analisa Kinematik secara spatial untuk Rack and pinion pada Kendaraan hybrid roda 3 Sapujagad 2 Oleh : Fachri Nugrahasyah Putra Nrp : 2108100107 Dosen Pembimbing : Dr. Unggul Wasiwitono, ST, M.Eng Keamanan
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Gokart Gokart merupakan salah satu produk yang sarat dengan teknologi dan perkembangan. Ditnjau dari segi komponen, Gokart mempunyai beragam komponen didalamnya, namun secara
BAB II LANDASAN TEORI 2.1 Gokart Gokart merupakan salah satu produk yang sarat dengan teknologi dan perkembangan. Ditnjau dari segi komponen, Gokart mempunyai beragam komponen didalamnya, namun secara
Perancangan dan Analisa Sistem Kemudi Narrow Tilting Vehicle dengan Variasi Trackwidth dan Panjang Suspensi Arm
 E126 Perancangan dan Analisa Sistem Kemudi Narrow Tilting Vehicle dengan Variasi Trackwidth dan Panjang Suspensi Arm Idestrian Adzanta dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri,
E126 Perancangan dan Analisa Sistem Kemudi Narrow Tilting Vehicle dengan Variasi Trackwidth dan Panjang Suspensi Arm Idestrian Adzanta dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri,
JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: ( Print) E120
 ISSN: ( Print) E120") JURNAL TEKNIK ITS Vol., No. 2, (216) ISSN: 2337-39 (231-9271 Print) E12 Perancangan dan Analisa Sistem Kemudi dan Sistem Suspensi Quadrilateral Pada Narrow Tilting Vehicle Rizal Pribadi Restuaji, dan Unggul
JURNAL TEKNIK ITS Vol., No. 2, (216) ISSN: 2337-39 (231-9271 Print) E12 Perancangan dan Analisa Sistem Kemudi dan Sistem Suspensi Quadrilateral Pada Narrow Tilting Vehicle Rizal Pribadi Restuaji, dan Unggul
Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin Speed 3
 JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: 2337-3539 (2301-9271 Print) F-301 Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin
JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: 2337-3539 (2301-9271 Print) F-301 Analisa Perilaku Arah Kendaraan dengan Variasi Posisi Titik Berat, Sudut Belok dan Kecepatan Pada Mobil Formula Sapuangin
SISTEM KEMUDI & WHEEL ALIGNMENT
 SISTEM KEMUDI & WHEEL ALIGNMENT SISTEM KEMUDI I. URAIAN Fungsi sistem kemudi adalah untuk mengatur arah kendaraan dengan cara membelokkan roda depan. Bila steering wheel diputar, steering column akan meneruskan
SISTEM KEMUDI & WHEEL ALIGNMENT SISTEM KEMUDI I. URAIAN Fungsi sistem kemudi adalah untuk mengatur arah kendaraan dengan cara membelokkan roda depan. Bila steering wheel diputar, steering column akan meneruskan
JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1
 ISSN: 2301-9271 1") JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1 Analisa Kestabilan Arah pada Kendaraan Formula Sapu Angin Speed Berdasarkan Variasi Posisi Titik Berat, Kecepatan dan Tes Dinamik Student Formula
JURNAL TEKNIK POMITS Vol. 1, No. 2, (2012) ISSN: 2301-9271 1 Analisa Kestabilan Arah pada Kendaraan Formula Sapu Angin Speed Berdasarkan Variasi Posisi Titik Berat, Kecepatan dan Tes Dinamik Student Formula
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Sistem Kemudi Di dalam sebuah sistem kemudi ada dua faktor yang menjadi tujuan dari setiap pengembangan teknologi otomotif yaitu mempermudah pengendalian kendaraan dan meningkatkan
BAB II LANDASAN TEORI 2.1 Sistem Kemudi Di dalam sebuah sistem kemudi ada dua faktor yang menjadi tujuan dari setiap pengembangan teknologi otomotif yaitu mempermudah pengendalian kendaraan dan meningkatkan
PERANCANGAN SISTEM KEMUDI MANUAL PADA MOBIL LISTRIK
 Jurnal Elemen Volume 4 Nomor 1, Juni 2017 ISSN : 2442-4471 PERANCANGAN SISTEM KEMUDI MANUAL PADA MOBIL LISTRIK Kurnia Dwi Artika 1, Rusuminto Syahyuniar 2, Nanda Priono 3 1),2) Staf Pengajar Jurusan Mesin
Jurnal Elemen Volume 4 Nomor 1, Juni 2017 ISSN : 2442-4471 PERANCANGAN SISTEM KEMUDI MANUAL PADA MOBIL LISTRIK Kurnia Dwi Artika 1, Rusuminto Syahyuniar 2, Nanda Priono 3 1),2) Staf Pengajar Jurusan Mesin
Analisis Stabilitas Arah Mobil Toyota Agya G dengan Variasi Jumlah Penumpang, Kecepatan Belok, Sudut Belok dan Kemiringan Melintang Jalan
 JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2301-9271 A-35 Analisis Stabilitas Arah Mobil Toyota Agya G dengan Variasi Jumlah Penumpang, Kecepatan Belok, Sudut Belok dan Kemiringan Melintang Jalan Faisal
JURNAL TEKNIK ITS Vol. 6, No. 1, (2017) ISSN: 2301-9271 A-35 Analisis Stabilitas Arah Mobil Toyota Agya G dengan Variasi Jumlah Penumpang, Kecepatan Belok, Sudut Belok dan Kemiringan Melintang Jalan Faisal
STEERING. Komponen Sistem Kemudi/ Steering
 STEERING Fungsi sistem kemudi adalah untuk mengatur arah kendaraan dengan cara membelokkan roda-roda depan. Bila roda kemudi diputar, steering column akan meneruskan tenaga putarnya ke steering gear. Steering
STEERING Fungsi sistem kemudi adalah untuk mengatur arah kendaraan dengan cara membelokkan roda-roda depan. Bila roda kemudi diputar, steering column akan meneruskan tenaga putarnya ke steering gear. Steering
PERANCANGAN MEKANISME UJI KARAKTERISTIK SISTEM KEMUDI
 PERANCANGAN MEKANISME UJI KARAKTERISTIK SISTEM KEMUDI Mochammad Reza Pahlevi, Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman
PERANCANGAN MEKANISME UJI KARAKTERISTIK SISTEM KEMUDI Mochammad Reza Pahlevi, Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman
Membongkar Sistem Kemudi Tipe Recirculating Ball
 Jobsheet Membongkar Sistem Kemudi Tipe Recirculating Ball 1. Tujuan Siswa mengenal komponen sistem kemudi Tipe Recirculating Ball Siswa memahami cara kerja sistem kemudi Tipe Recirculating Ball Siswa mampu
Jobsheet Membongkar Sistem Kemudi Tipe Recirculating Ball 1. Tujuan Siswa mengenal komponen sistem kemudi Tipe Recirculating Ball Siswa memahami cara kerja sistem kemudi Tipe Recirculating Ball Siswa mampu
BAB II LANDASAN TEORI. seperti mesin, suspensi transmisi serta digunakan untuk menjaga mobil agar
 7 BAB II LANDASAN TEORI 2.1 Definisi Chassis Chassis merupakan komponen utama pada kendaraan yang terbuat dari material kuat seperti besi dan baja, yang di buat dengan struktur dan perhitungan yang presisi
7 BAB II LANDASAN TEORI 2.1 Definisi Chassis Chassis merupakan komponen utama pada kendaraan yang terbuat dari material kuat seperti besi dan baja, yang di buat dengan struktur dan perhitungan yang presisi
Seminar Nasional Mesin dan Industri (SNMI4) 2008
 2008") Seminar Nasional Mesin dan Industri (SNMI) ANALISA KINEMATIKA GERAKAN BELOK AKIBAT PENGARUH DYNAMIC CENTRE OF GRAVITY (COG) DAN PANJANG WHEELBASE (L) MENENTUKAN SUDUT SIDE SLIP (Β) DAN HUBUNGANNYA TERHADAP
Seminar Nasional Mesin dan Industri (SNMI) ANALISA KINEMATIKA GERAKAN BELOK AKIBAT PENGARUH DYNAMIC CENTRE OF GRAVITY (COG) DAN PANJANG WHEELBASE (L) MENENTUKAN SUDUT SIDE SLIP (Β) DAN HUBUNGANNYA TERHADAP
PERANCANGAN SISTEM KEMUDI GOKAR LISTRIK
 PERANCANGAN SISTEM KEMUDI GOKAR LISTRIK Judhistira Freily Mamahit 1), Stenly Tangkuman 2), Michael Rembet 3) Jurusan Teknik Mesin Universitas Sam Ratulangi ABSTRAK Sistem kemudi berfungsi untuk membelokan
PERANCANGAN SISTEM KEMUDI GOKAR LISTRIK Judhistira Freily Mamahit 1), Stenly Tangkuman 2), Michael Rembet 3) Jurusan Teknik Mesin Universitas Sam Ratulangi ABSTRAK Sistem kemudi berfungsi untuk membelokan
Analisa Perilaku Gerak Belok Mobil Listrik ITS 1
 JURNAL TEKNIK POMITS Vol. 1, No. 2, (212) ISSN: 231-9271 1 Analisa Perilaku Gerak Belok Mobil Listrik ITS 1 Pradana Setia B.L dan Unggul Wasiwitono Jurusan Teknik Mesin ITS, Fakultas Teknologi Industri,
JURNAL TEKNIK POMITS Vol. 1, No. 2, (212) ISSN: 231-9271 1 Analisa Perilaku Gerak Belok Mobil Listrik ITS 1 Pradana Setia B.L dan Unggul Wasiwitono Jurusan Teknik Mesin ITS, Fakultas Teknologi Industri,
Rancang Bangun Sistem Chassis Kendaraan Pengais Garam
 SIDANG TUGAS AKHIR TM091476 Rancang Bangun Sistem Chassis Kendaraan Pengais Garam Oleh: AGENG PREMANA 2108 100 603 JURUSAN TEKNIK MESIN FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
SIDANG TUGAS AKHIR TM091476 Rancang Bangun Sistem Chassis Kendaraan Pengais Garam Oleh: AGENG PREMANA 2108 100 603 JURUSAN TEKNIK MESIN FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
MODUL SISTEM KEMUDI DPKJ OLEH : KHUSNIADI PROGRAM STUDI TEKNIK KENDARAAN RINGAN JURUSAN TEKNIK MEKANIK OTOMOTIF SMK NEGERI 1 BUKITTINGGI 2011
 1 MODUL SISTEM KEMUDI DPKJ OLEH : KHUSNIADI PROGRAM STUDI TEKNIK KENDARAAN RINGAN JURUSAN TEKNIK MEKANIK OTOMOTIF SMK NEGERI 1 BUKITTINGGI 2011 2 SISTEM KEMUDI Kompetensi : Menjelaskan pengertian prinsip
1 MODUL SISTEM KEMUDI DPKJ OLEH : KHUSNIADI PROGRAM STUDI TEKNIK KENDARAAN RINGAN JURUSAN TEKNIK MEKANIK OTOMOTIF SMK NEGERI 1 BUKITTINGGI 2011 2 SISTEM KEMUDI Kompetensi : Menjelaskan pengertian prinsip
dapat ditunjukkan pada gambar berikut ini. Tan δ 2 = a/r + s (2.2)
") PROYEK KENDARAAN LISTRIK BERTENAGA BANTU SEL SURYA ( KLBS G-1 ) SUB JUDUL SISTEM KEMUDI ELEKTRIK TIPE ACKERMANN PADA KENDARAAN LISTRIK BERTENAGA BANTU SEL SURYA Gita Pramana*, EndraPitowarno** *Mahasiswa
PROYEK KENDARAAN LISTRIK BERTENAGA BANTU SEL SURYA ( KLBS G-1 ) SUB JUDUL SISTEM KEMUDI ELEKTRIK TIPE ACKERMANN PADA KENDARAAN LISTRIK BERTENAGA BANTU SEL SURYA Gita Pramana*, EndraPitowarno** *Mahasiswa
ANALISA KINERJA SUDUT KEMUDI PADA KENDARAAN DUNE BUGGY POLITEKNIK NEGERI BATAM ABSTRAK ABSTRACT
 ANALISA KINERJA SUDUT KEMUDI PADA KENDARAAN DUNE BUGGY POLITEKNIK NEGERI BATAM Koko Suharyanto, Wowo Rossbandrio*, Fedia Restu Program Studi Teknik Mesin, Teknik Mesin Politeknik Negeri Batam *rossbandrio@yahoo.com
ANALISA KINERJA SUDUT KEMUDI PADA KENDARAAN DUNE BUGGY POLITEKNIK NEGERI BATAM Koko Suharyanto, Wowo Rossbandrio*, Fedia Restu Program Studi Teknik Mesin, Teknik Mesin Politeknik Negeri Batam *rossbandrio@yahoo.com
PerancanganMekanisme UjiKarakteristikSistem Kemudi
 PerancanganMekanisme UjiKarakteristikSistem Kemudi oleh M Reza Pahlevi Dosen Pembimbing : Dr. Eng. Unggul Wasiwitono, ST. M Eng. Sc. Page 1 Latar Belakang Page 2 Perumusan Masalah 1. Bagaimana merancang
PerancanganMekanisme UjiKarakteristikSistem Kemudi oleh M Reza Pahlevi Dosen Pembimbing : Dr. Eng. Unggul Wasiwitono, ST. M Eng. Sc. Page 1 Latar Belakang Page 2 Perumusan Masalah 1. Bagaimana merancang
BAB III ANALISIS FRONT WHEEL ALIGNMENT PADA DAIHATSU GRAN MAX PICK UP
 BAB III ANALISIS FRONT WHEEL ALIGNMENT PADA DAIHATSU GRAN MAX PICK UP A. Spesifikasi Kendaraan Daihatsu Gran Max SPESIFIKASI PICK UP 1.3 1.5 STD 3W STD 3W BOX 1.3 1.5 DIMENSI Panjang keseluruhan Lebar
BAB III ANALISIS FRONT WHEEL ALIGNMENT PADA DAIHATSU GRAN MAX PICK UP A. Spesifikasi Kendaraan Daihatsu Gran Max SPESIFIKASI PICK UP 1.3 1.5 STD 3W STD 3W BOX 1.3 1.5 DIMENSI Panjang keseluruhan Lebar
ANALISA GAYA PADA SISTEM KEMUDI TYPE RECIRCULATING BALL
 ANALISA GAYA PADA SISTEM KEMUDI TYPE RECIRCULATING BALL PUBLIKASI ILMIAH Disusun sebagai salah satu syarat menyelesaikan program studi Strata 1 pada Jurusan Teknik Mesin Fakultas Teknik Universitas Muhammadiyah
ANALISA GAYA PADA SISTEM KEMUDI TYPE RECIRCULATING BALL PUBLIKASI ILMIAH Disusun sebagai salah satu syarat menyelesaikan program studi Strata 1 pada Jurusan Teknik Mesin Fakultas Teknik Universitas Muhammadiyah
PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD
 1 PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Bagus Kusuma Ruswandiri, dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi
1 PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Bagus Kusuma Ruswandiri, dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi
BAB 1 PENDAHULUAN. akan berbelok, maka ada dua skenario atau kejadian yang dikenal sebagai understeer
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Masalah Dalam berkendara, ketika kendaraan telah mencapai sebuah tikungan dan akan berbelok, maka ada dua skenario atau kejadian yang dikenal sebagai understeer dan
BAB 1 PENDAHULUAN 1.1 Latar Belakang Masalah Dalam berkendara, ketika kendaraan telah mencapai sebuah tikungan dan akan berbelok, maka ada dua skenario atau kejadian yang dikenal sebagai understeer dan
Sistem suspensi dipasang diantara rangka kendaraan dengan poros roda, supaya getaran atau goncangan yang terjadi tidak di teruskan ke body.
 SISTEM SUSPENSI Sistem suspensi dipasang diantara rangka kendaraan dengan poros roda, supaya getaran atau goncangan yang terjadi tidak di teruskan ke body. SPRUNG WEIGHT DAN UNSPRUNG WEIGHT Pada umumnya
SISTEM SUSPENSI Sistem suspensi dipasang diantara rangka kendaraan dengan poros roda, supaya getaran atau goncangan yang terjadi tidak di teruskan ke body. SPRUNG WEIGHT DAN UNSPRUNG WEIGHT Pada umumnya
PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD
 PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Oleh: Bagus Kusuma Ruswandiri 2108100120 Dosen Pembimbing: Prof. Ir. I Nyoman Sutantra, M.Sc., Ph.D. Latar Belakang
PERENCANAAN LAYOUT DAN ANALISIS STABILITAS PADA KENDARAAN HYBRID RODA TIGA HYVI SAPUJAGAD Oleh: Bagus Kusuma Ruswandiri 2108100120 Dosen Pembimbing: Prof. Ir. I Nyoman Sutantra, M.Sc., Ph.D. Latar Belakang
PERANCANGAN INTERFACING DAN SOFTWARE PEMBACAAN DATA MEKANISME UJI KARAKTERISTIK SISTEM KEMUDI
 PERANCANGAN INTERFACING DAN SOFTWARE PEMBACAAN DATA MEKANISME UJI KARAKTERISTIK SISTEM KEMUDI O L E H : A R I S Y U D H A S E T I A W A N D O S E N P E M B I M B I N G : D R. E N G. U N G G U L W A S I
PERANCANGAN INTERFACING DAN SOFTWARE PEMBACAAN DATA MEKANISME UJI KARAKTERISTIK SISTEM KEMUDI O L E H : A R I S Y U D H A S E T I A W A N D O S E N P E M B I M B I N G : D R. E N G. U N G G U L W A S I
BAB III PERHITUNGAN BAGIAN-BAGIAN UTAMA
 BAB III PERHITUNGAN BAGIAN-BAGIAN UTAMA 3.1 Perancangan Sistem Kemudi Gokart Proses peracangan sistem kemudi gokart menggunakan metode analisa perancangan dengan melakukan perhitungan-perhitungan manual.
BAB III PERHITUNGAN BAGIAN-BAGIAN UTAMA 3.1 Perancangan Sistem Kemudi Gokart Proses peracangan sistem kemudi gokart menggunakan metode analisa perancangan dengan melakukan perhitungan-perhitungan manual.
Kata kunci: understeer, oversteer.
 1 ANALISA PERILAKU ARAH MOBIL GEA PADA LINTASAN BELOK MENURUN DENGAN VARIASI KECEPATAN, BERAT MUATAN, SUDUT KEMIRINGAN MELINTANG, SUDUT TURUNAN JALAN DAN RADIUS BELOK JALAN Rizqi An Naafi dan J. Lubi Jurusan
1 ANALISA PERILAKU ARAH MOBIL GEA PADA LINTASAN BELOK MENURUN DENGAN VARIASI KECEPATAN, BERAT MUATAN, SUDUT KEMIRINGAN MELINTANG, SUDUT TURUNAN JALAN DAN RADIUS BELOK JALAN Rizqi An Naafi dan J. Lubi Jurusan
PARAMETER SUDUT BELOK RODA PADA KENDARAAN DENGAN SISTEM KEMUDI EMPAT RODA
 209 PARAMETER SUDUT BELOK RODA PADA KENDARAAN DENGAN SISTEM KEMUDI EMPAT RODA Wibowo 1 1 Staf Pengajar Jurusan Teknik Mesin Universitas Sebelas Maret Keywords : Two wheel steering Four wheel steering Steer
209 PARAMETER SUDUT BELOK RODA PADA KENDARAAN DENGAN SISTEM KEMUDI EMPAT RODA Wibowo 1 1 Staf Pengajar Jurusan Teknik Mesin Universitas Sebelas Maret Keywords : Two wheel steering Four wheel steering Steer
Rizqi An Naafi Dosen Pembimbing: Ir. J. Lubi
 Analisa Perilaku Arah Mobil GEA pada Jalan Belok Menurun dengan Variasi Kecepatan, Berat Muatan, Sudut Kemiringan Melintang, Sudut Turunan Jalan dan Radius Belok Jalan Rizqi An Naafi 2109 100 035 Dosen
Analisa Perilaku Arah Mobil GEA pada Jalan Belok Menurun dengan Variasi Kecepatan, Berat Muatan, Sudut Kemiringan Melintang, Sudut Turunan Jalan dan Radius Belok Jalan Rizqi An Naafi 2109 100 035 Dosen
BAB III LANDASAN TEORI. start. Persiapan alat. Dongkrak roda depan. Setting laser. Setting lavel. Sentering as. Sentering titk roda. setting.
 BAB III LANDASAN TEORI 3.1 Flow chart start Persiapan alat Dongkrak roda depan Setting laser Setting lavel Sentering as Sentering titk roda setting selesai Gambar 3.1 Flow chart proses front wheel aligment(doc
BAB III LANDASAN TEORI 3.1 Flow chart start Persiapan alat Dongkrak roda depan Setting laser Setting lavel Sentering as Sentering titk roda setting selesai Gambar 3.1 Flow chart proses front wheel aligment(doc
BAB III KONSTRUKSI DOUBLE WISHBONE
 BAB III KONSTRUKSI DOUBLE WISHBONE Suspensi double wishbone merupakan sebuah mekanisme suspensi bebas yang terdiri dari lengan-lengan (dapat berbentuk silinder berlubang, pipa, maupun batang) yang memiliki
BAB III KONSTRUKSI DOUBLE WISHBONE Suspensi double wishbone merupakan sebuah mekanisme suspensi bebas yang terdiri dari lengan-lengan (dapat berbentuk silinder berlubang, pipa, maupun batang) yang memiliki
Undercarriage and Tyre ( DTAB 2207, 2 SKS)
") UNIVERSITAS GADJAH MADA SEKOLAH VOKASI DIPLOMA TEKNIK MESIN Jl. Yacaranda Sekip Unit IV, Yogyakarta RPKPM (Rencana Program dan Pembelajaran Mingguan) Modul Pembelajaran Pertemuan -2 Undercarriage and Tyre
UNIVERSITAS GADJAH MADA SEKOLAH VOKASI DIPLOMA TEKNIK MESIN Jl. Yacaranda Sekip Unit IV, Yogyakarta RPKPM (Rencana Program dan Pembelajaran Mingguan) Modul Pembelajaran Pertemuan -2 Undercarriage and Tyre
Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda
 E97 Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda Yansen Prayitno dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
E97 Pemodelan Gerak Belok Steady State dan Transient pada Kendaraan Empat Roda Yansen Prayitno dan Unggul Wasiwitono Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
Analisis Stabilitas dan Kekuatan Pengait Bak Angkut Kendaraan Multiguna Pedesaan
 JURNAL TEKNIK ITS Vol. 6, No. 2, (27) ISSN: 2337539 (23-927 Print) E4 Analisis Stabilitas dan Kekuatan Pengait Bak Angkut Kendaraan Multiguna Pedesaan Alfian Rafi Harsyawina dan I Nyoman Sutantra Departemen
JURNAL TEKNIK ITS Vol. 6, No. 2, (27) ISSN: 2337539 (23-927 Print) E4 Analisis Stabilitas dan Kekuatan Pengait Bak Angkut Kendaraan Multiguna Pedesaan Alfian Rafi Harsyawina dan I Nyoman Sutantra Departemen
Oleh : Bimo Arindra Hapsara Dosen Pembimbing : Ir. J. Lubi. Proposal Tugas Akhir. Tugas Akhir
 Proposal Tugas Akhir Tugas Akhir Oleh : Bimo Arindra Hapsara 2106 100 047 Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kecelakaan
Proposal Tugas Akhir Tugas Akhir Oleh : Bimo Arindra Hapsara 2106 100 047 Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kecelakaan
Analisa Sudut Belok Roda Belakang Sebagai Fungsi Sudut Belok Roda Depan dan Kecepatan pada Kendaraan Mini 4WS
 Analisa Sudut Belok Roda Belakang Sebagai Fungsi Sudut Belok Roda Depan dan Kecepatan pada Kendaraan Mini 4WS Yunarko Triwinarno Dosen Fakultas Teknologi Industri, Jurusan Teknik Mesin - Institut Teknologi
Analisa Sudut Belok Roda Belakang Sebagai Fungsi Sudut Belok Roda Depan dan Kecepatan pada Kendaraan Mini 4WS Yunarko Triwinarno Dosen Fakultas Teknologi Industri, Jurusan Teknik Mesin - Institut Teknologi
ANALISA DYNAMIC OF HANDLING KENDARAAN REVERSE TRIKE DITINJAU DARI PERGESERAN CENTRE OF GRAVITY (CG) SKRIPSI
 SKRIPSI") ANALISA DYNAMIC OF HANDLING KENDARAAN REVERSE TRIKE DITINJAU DARI PERGESERAN CENTRE OF GRAVITY (CG) SKRIPSI Diajukan sebagai salah satu syarat untuk memperoleh gelar SarjanaTeknik Oleh: BHANU PUTRA BUMI
ANALISA DYNAMIC OF HANDLING KENDARAAN REVERSE TRIKE DITINJAU DARI PERGESERAN CENTRE OF GRAVITY (CG) SKRIPSI Diajukan sebagai salah satu syarat untuk memperoleh gelar SarjanaTeknik Oleh: BHANU PUTRA BUMI
Undercarriage and Tyre
 Materi. Undercarriage and Tyre ( DTAB 2207, 2 SKS) Konsentrasi Alat berat. Teknik mesin Sekolah Vokasi Universitas Gadjah Mada 2013 1 UNIVERSITAS GADJAH MADA SEKOLAH VOKASI DIPLOMA TEKNIK MESIN Jl. Yacaranda
Materi. Undercarriage and Tyre ( DTAB 2207, 2 SKS) Konsentrasi Alat berat. Teknik mesin Sekolah Vokasi Universitas Gadjah Mada 2013 1 UNIVERSITAS GADJAH MADA SEKOLAH VOKASI DIPLOMA TEKNIK MESIN Jl. Yacaranda
DESAIN DAN SIMULASI KENEMATIKA PADA SISTEM KEMUDI DENGAN SUDUT 90 o
 DESAIN DAN SIMULASI KENEMATIKA PADA SISTEM KEMUDI DENGAN SUDUT 90 o Agus Dwi Anggono 1), Joko Sedyono 2) Bana Handaga 3) 1,2 Jurusan Teknik Mesin, 3 Teknik Informatika Universitas Muhammadiyah Surakarta
DESAIN DAN SIMULASI KENEMATIKA PADA SISTEM KEMUDI DENGAN SUDUT 90 o Agus Dwi Anggono 1), Joko Sedyono 2) Bana Handaga 3) 1,2 Jurusan Teknik Mesin, 3 Teknik Informatika Universitas Muhammadiyah Surakarta
BAB IV HASIL DAN ANALISA. Gambar 4.1 Seteering gear box
 BAB IV HASIL DAN ANALISA 1.1 Proses analisa dan perbaikan sistem kemudi 1. Melepaskan Steering Gear box, untuk melepaskan steering gear box putar samping steering gear box untuk melepaskan komponen, dari
BAB IV HASIL DAN ANALISA 1.1 Proses analisa dan perbaikan sistem kemudi 1. Melepaskan Steering Gear box, untuk melepaskan steering gear box putar samping steering gear box untuk melepaskan komponen, dari
Analisa dynamics of handling kendaraan reverse trike ditinjau dari pergeseran centre of gravity (cg)
") Analisa dynamics of handling kendaraan reverse trike ditinjau dari pergeseran centre of gravity (cg) Bhanu Putra Bumi 1, Wibowo 2, R. Lulus Lambang G Hidayat 2 1 Program Sarjana Teknik Mesin, FakultasTeknik,
Analisa dynamics of handling kendaraan reverse trike ditinjau dari pergeseran centre of gravity (cg) Bhanu Putra Bumi 1, Wibowo 2, R. Lulus Lambang G Hidayat 2 1 Program Sarjana Teknik Mesin, FakultasTeknik,
STUDI PERFORMANSI KENDARAAN MULTIGUNA PEDESAAN
 0708: Yohanes & Agus S. Pramono TR-65 STUDI PERFORMANSI KENDARAAN MULTIGUNA PEDESAAN Yohanes dan Agus Sigit Pramono Laboratorium Otomotif Jurusan Teknik Mesin, Institut Teknologi Sepuluh Nopember Kampus
0708: Yohanes & Agus S. Pramono TR-65 STUDI PERFORMANSI KENDARAAN MULTIGUNA PEDESAAN Yohanes dan Agus Sigit Pramono Laboratorium Otomotif Jurusan Teknik Mesin, Institut Teknologi Sepuluh Nopember Kampus
DIFFERENTIAL KELAS XI OLEH : HARIS MAULANA MARZUKI
 SMK MUHAMMADIYAH BULAKAMBA - BREBES DIFFERENTIAL KELAS XI OLEH : HARIS MAULANA MARZUKI FINAL DRIVE ( GARDAN ) Fungsi Final drive pada kendaraan adalah untuk merubah arah putaran poros propeller kearah
SMK MUHAMMADIYAH BULAKAMBA - BREBES DIFFERENTIAL KELAS XI OLEH : HARIS MAULANA MARZUKI FINAL DRIVE ( GARDAN ) Fungsi Final drive pada kendaraan adalah untuk merubah arah putaran poros propeller kearah
MEKANISME KERJA MESIN TOE TESTER DI PT. SUZUKI INDOMOBIL MOTOR PLANT TAMBUN II
 MEKANISME KERJA MESIN TOE TESTER DI PT. SUZUKI INDOMOBIL MOTOR PLANT TAMBUN II PENDAHULUAN Latar Belakang Masalah Mesin Toe Tester misalnya, penyetelan seperti ini banyak sekali digunakan umumya pada pabrik
MEKANISME KERJA MESIN TOE TESTER DI PT. SUZUKI INDOMOBIL MOTOR PLANT TAMBUN II PENDAHULUAN Latar Belakang Masalah Mesin Toe Tester misalnya, penyetelan seperti ini banyak sekali digunakan umumya pada pabrik
MODIFIKASI SISTEM KEMUDI MANUAL MENJADI POWER STEERING PADA TOYOTA KIJANG 5K
 MODIFIKASI SISTEM KEMUDI MANUAL MENJADI POWER STEERING PADA TOYOTA KIJANG 5K (POMPA) PROYEK AKHIR Diajukan sebagai salah satu syarat Untuk memperoleh gelar Ahli Madya Oleh : WHONICA NIM. I 8609037 PROGRAM
MODIFIKASI SISTEM KEMUDI MANUAL MENJADI POWER STEERING PADA TOYOTA KIJANG 5K (POMPA) PROYEK AKHIR Diajukan sebagai salah satu syarat Untuk memperoleh gelar Ahli Madya Oleh : WHONICA NIM. I 8609037 PROGRAM
BAB IV GEOMETRI RODA
 BAB IV GEOMETRI RODA 4.1 TUJUAN PEMBELAJARAN Peserta didik dapat: 1. Menjelaskan pentingnya meluruskan roda 2. Mengetahui tanda-tanda roda harus diluruskan 3. Mengetahui 4. Mengetahui dan menggunakan peralatan
BAB IV GEOMETRI RODA 4.1 TUJUAN PEMBELAJARAN Peserta didik dapat: 1. Menjelaskan pentingnya meluruskan roda 2. Mengetahui tanda-tanda roda harus diluruskan 3. Mengetahui 4. Mengetahui dan menggunakan peralatan
Seminar Nasional Mesin dan Industri (SNMI4) 2008 PENENTUAN REGION SKID-NON SKID (2WS) TYPE MODEL KENDARAAN REAR WHEEL DRIVE (RWD)
 2008 PENENTUAN REGION SKID-NON SKID (2WS) TYPE MODEL KENDARAAN REAR WHEEL DRIVE (RWD)") PENENTUAN REGION SKID-NON SKID (2WS) TYPE MODEL KENDARAAN REAR WHEEL DRIVE (RWD) Ian Hardianto Siahaan dan Willyanto Anggono Jurusan Teknik Mesin Fakultas Teknologi Industri Universitas Kristen Petra Laboratorium
PENENTUAN REGION SKID-NON SKID (2WS) TYPE MODEL KENDARAAN REAR WHEEL DRIVE (RWD) Ian Hardianto Siahaan dan Willyanto Anggono Jurusan Teknik Mesin Fakultas Teknologi Industri Universitas Kristen Petra Laboratorium
BAB III BALANS RODA/BAN
 BAB III BALANS RODA/BAN 3.1 TUJUAN Peserta didik dapat : 1. Dapat mengidentifikasi gangguan pada roda / ban 2. Dapat memahami dan menjelaskan balans static dan balans dinamik 3. Dapat membalans roda pada
BAB III BALANS RODA/BAN 3.1 TUJUAN Peserta didik dapat : 1. Dapat mengidentifikasi gangguan pada roda / ban 2. Dapat memahami dan menjelaskan balans static dan balans dinamik 3. Dapat membalans roda pada
TUGAS AKHIR ANALISIS PENGUATAN DAN DEVELOPMENT FRONT WHEEL ALIGNMENT (FWA) PADA MITSUBISHI LANCER SL SPESIFIKASI DRIFTING
 PADA MITSUBISHI LANCER SL SPESIFIKASI DRIFTING") TUGAS AKHIR ANALISIS PENGUATAN DAN DEVELOPMENT FRONT WHEEL ALIGNMENT (FWA) PADA MITSUBISHI LANCER SL SPESIFIKASI DRIFTING Diajukan Sebagai Salah Satu Syarat untuk Memperoleh Gelar Madya - D3 Program Studi
TUGAS AKHIR ANALISIS PENGUATAN DAN DEVELOPMENT FRONT WHEEL ALIGNMENT (FWA) PADA MITSUBISHI LANCER SL SPESIFIKASI DRIFTING Diajukan Sebagai Salah Satu Syarat untuk Memperoleh Gelar Madya - D3 Program Studi
MODIFIKASI SISTEM KEMUDI MANUAL MENJADI SISTEM KEMUDI DENGAN POWER STEERING TIPE RACK AND PINION PADA TOYOTA KIJANG 5K
 MODIFIKASI SISTEM KEMUDI MANUAL MENJADI SISTEM KEMUDI DENGAN POWER STEERING TIPE RACK AND PINION PADA TOYOTA KIJANG 5K PROYEK AKHIR Diajukan sebagai salah satu syarat untuk memperoleh gelar Ahli Madya
MODIFIKASI SISTEM KEMUDI MANUAL MENJADI SISTEM KEMUDI DENGAN POWER STEERING TIPE RACK AND PINION PADA TOYOTA KIJANG 5K PROYEK AKHIR Diajukan sebagai salah satu syarat untuk memperoleh gelar Ahli Madya
INFOMATEK Volume 6 Nomor 1 Maret 2004 DESAIN & PEMBUATAN PROTOTIPE LIGHT BUGGY
 Desain & Pembuatan Prototipe Light Buggy INFOMATEK Volume 6 Nomor 1 Maret 2004 DESAIN & PEMBUATAN PROTOTIPE LIGHT BUGGY Farid Rizayana Design Center Jurusan Teknik Mesin Fakultas Teknik Universitas Pasundan
Desain & Pembuatan Prototipe Light Buggy INFOMATEK Volume 6 Nomor 1 Maret 2004 DESAIN & PEMBUATAN PROTOTIPE LIGHT BUGGY Farid Rizayana Design Center Jurusan Teknik Mesin Fakultas Teknik Universitas Pasundan
Integrasi Parameter Traksi dalam Pengendalian Perilaku Yawing Multi Steering Sistim
 Integrasi Parameter Traksi dalam Pengendalian Perilaku Yawing Multi Steering Sistim I.D.G Ary Subagia Jurusan Teknik Mesin Fakultas Teknik Universitas Udayana Email: arsubmt@me.unud.ac.id ABSTRAK Sistem
Integrasi Parameter Traksi dalam Pengendalian Perilaku Yawing Multi Steering Sistim I.D.G Ary Subagia Jurusan Teknik Mesin Fakultas Teknik Universitas Udayana Email: arsubmt@me.unud.ac.id ABSTRAK Sistem
BAB 4 EVALUASI DAN ANALISA DATA
 BAB 4 EVALUASI DAN ANALISA DATA Pada bab ini akan dibahas tentang evaluasi dan analisa data yang terdapat pada penelitian yang dilakukan. 4.1 Evaluasi inverse dan forward kinematik Pada bagian ini dilakukan
BAB 4 EVALUASI DAN ANALISA DATA Pada bab ini akan dibahas tentang evaluasi dan analisa data yang terdapat pada penelitian yang dilakukan. 4.1 Evaluasi inverse dan forward kinematik Pada bagian ini dilakukan
BAB III DATA KENDARAAN UNTUK SIMULASI
 BAB III DATA KENDARAAN UNTUK SIMULASI 3.1. Tinjauan Pemodelan truk secara lengkap dikembangkan dan bertujuan untuk mempelajari efektivitas dari sistem Antilock Braking System termasuk pemodelan dinamika
BAB III DATA KENDARAAN UNTUK SIMULASI 3.1. Tinjauan Pemodelan truk secara lengkap dikembangkan dan bertujuan untuk mempelajari efektivitas dari sistem Antilock Braking System termasuk pemodelan dinamika
BAB I MENGENAL SISTEM KEMUDI MANUAL PADA MOBIL
 BAB I MENGENAL SISTEM KEMUDI MANUAL PADA MOBIL Fungsi sistem kemudi Sistem kemudi pada kendaraan berfungsi untuk merubah arah gerak kendaraan melalui roda. Sistem kemudi harus dapat memberikan informasi
BAB I MENGENAL SISTEM KEMUDI MANUAL PADA MOBIL Fungsi sistem kemudi Sistem kemudi pada kendaraan berfungsi untuk merubah arah gerak kendaraan melalui roda. Sistem kemudi harus dapat memberikan informasi
NAMA : JOKO PAMBUDIANTO NRP : DOSEN PEMBIMBING Prof. Dr. Ing. Ir. I Made Londen Batan, M. Eng. Tugas Akhir PERANCANGAN SEPEDA PASCA STROKE
 Tugas Akhir PERANCANGAN SEPEDA PASCA STROKE NAMA : JOKO PAMBUDIANTO NRP : 2107100075 DOSEN PEMBIMBING Prof. Dr. Ing. Ir. I Made Londen Batan, M. Eng PROGRAM SARJANA BIDANG KEAHLIAN SISTEM MANUFAKTUR JURUSAN
Tugas Akhir PERANCANGAN SEPEDA PASCA STROKE NAMA : JOKO PAMBUDIANTO NRP : 2107100075 DOSEN PEMBIMBING Prof. Dr. Ing. Ir. I Made Londen Batan, M. Eng PROGRAM SARJANA BIDANG KEAHLIAN SISTEM MANUFAKTUR JURUSAN
SIMULASI PENGENDALIAN SUDUT KEMIRINGAN BELOK SEPEDA MOTOR MELALUI PENAMBAHAN KOMPONEN GYROSCOPIC
 SIMULASI PENGENDALIAN SUDUT KEMIRINGAN BELOK SEPEDA MOTOR MELALUI PENAMBAHAN KOMPONEN GYROSCOPIC I Ketut Adi Atmika, I DG Ary Subagia Jurusan Teknik Mesin, Fakultas Teknik, Universitas Udayana E-mail :
SIMULASI PENGENDALIAN SUDUT KEMIRINGAN BELOK SEPEDA MOTOR MELALUI PENAMBAHAN KOMPONEN GYROSCOPIC I Ketut Adi Atmika, I DG Ary Subagia Jurusan Teknik Mesin, Fakultas Teknik, Universitas Udayana E-mail :
MODIFIKASI SISTEM KEMUDI MANUAL MENJADI SISTEM KEMUDI POWER STEERING PADA KIJANG 5K (STEERING GEAR) PROYEK AKHIR
 PROYEK AKHIR") digilib.uns.ac.id MODIFIKASI SISTEM KEMUDI MANUAL MENJADI SISTEM KEMUDI POWER STEERING PADA KIJANG 5K (STEERING GEAR) PROYEK AKHIR Diajukan sebagai salah satu syarat untuk memperoleh gelar Ahli Madya/Amd
digilib.uns.ac.id MODIFIKASI SISTEM KEMUDI MANUAL MENJADI SISTEM KEMUDI POWER STEERING PADA KIJANG 5K (STEERING GEAR) PROYEK AKHIR Diajukan sebagai salah satu syarat untuk memperoleh gelar Ahli Madya/Amd
RANCANG BANGUN SISTEM KEMUDI MANUAL PADA MOBIL LISTRIK GARUDA UNESA
 RANCANG BANGUN SISTEM KEMUDI MANUAL PADA MOBIL LISTRIK GARUDA UNESA Agus Suyono D3 Teknik Mesin, Fakultas Teknik, Universitas Negeri Surabaya E-mail: katanaaugust@yahoo.com I Made Arsana D3 Teknik Mesin,
RANCANG BANGUN SISTEM KEMUDI MANUAL PADA MOBIL LISTRIK GARUDA UNESA Agus Suyono D3 Teknik Mesin, Fakultas Teknik, Universitas Negeri Surabaya E-mail: katanaaugust@yahoo.com I Made Arsana D3 Teknik Mesin,
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Pengereman Modifikasi pengereman dan kemudi ini berlandaskan pada tinjauan pustaka yang mendukung terhadap cara kerja dari sistem pengereman dan kemudi. Rem adalah salah satu
BAB II LANDASAN TEORI 2.1 Pengereman Modifikasi pengereman dan kemudi ini berlandaskan pada tinjauan pustaka yang mendukung terhadap cara kerja dari sistem pengereman dan kemudi. Rem adalah salah satu
BAB III METODE PENELITIAN. 3.1 Diagram alir Berikut merupakan gambar diagram alur : Mulai. Kajian pustaka Studi Literatur
 20 BAB III METODE PENELITIAN 3.1 Diagram alir Berikut merupakan gambar diagram alur : Mulai Kajian pustaka Studi Literatur Analisa Penguatan Front Wheel Alignment Data Awal NO Perancangan FWA YES Penyedia
20 BAB III METODE PENELITIAN 3.1 Diagram alir Berikut merupakan gambar diagram alur : Mulai Kajian pustaka Studi Literatur Analisa Penguatan Front Wheel Alignment Data Awal NO Perancangan FWA YES Penyedia
Analisis dan Pengujian Stabilitas Saat Kondisi Berbelok pada Kendaraan Bermotor Roda Tiga sebagai Alat Bantu Transportasi bagi Penyandang Disabilitas
 Analisis dan Pengujian Stabilitas Saat Kondisi Berbelok pada Kendaraan Bermotor Roda Tiga sebagai Alat Bantu Transportasi bagi Penyandang Disabilitas Agus Setiawan 1, Wahyudi 2, Dhika Aditya P. 3 1 Program
Analisis dan Pengujian Stabilitas Saat Kondisi Berbelok pada Kendaraan Bermotor Roda Tiga sebagai Alat Bantu Transportasi bagi Penyandang Disabilitas Agus Setiawan 1, Wahyudi 2, Dhika Aditya P. 3 1 Program
BAB I PENDAHULUAN A. Latar Belakang Tio Agustian, 2014 Analisis front wheel alignment (fwa) pada kendaraan Daihatsu Gran Max Pick Up
 pada kendaraan Daihatsu Gran Max Pick Up") BAB I PENDAHULUAN A. Latar Belakang Perkembangan Industri mobil di Indonesia ini sangatlah maju, dalam penggunaannya mobil digunakan sebagai sarana yang dapat membantu kebanyakan orang untuk memindahkan
BAB I PENDAHULUAN A. Latar Belakang Perkembangan Industri mobil di Indonesia ini sangatlah maju, dalam penggunaannya mobil digunakan sebagai sarana yang dapat membantu kebanyakan orang untuk memindahkan
ANALISA SISTEM SUSPENSI KENDARAAN MULTIGUNA PEDESAAN (GEA)
") 1 ANALISA SISTEM SUSPENSI KENDARAAN MULTIGUNA PEDESAAN (GEA) Amirul Huda dan Unggul Wasiwitono,ST.,M.Eng.Sc,Dr.Eng Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
1 ANALISA SISTEM SUSPENSI KENDARAAN MULTIGUNA PEDESAAN (GEA) Amirul Huda dan Unggul Wasiwitono,ST.,M.Eng.Sc,Dr.Eng Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
Membongkar Sistem Kemudi Tipe Rack And Pinion
 Jobsheet Membongkar Sistem Kemudi Tipe Rack And Pinion 1. Tujuan Siswa mengenal komponen sistem kemudi Tipe Rack and Pinion Siswa memahami cara kerja sistem kemudi Tipe Rack and Pinion Siswa mampu membongkar
Jobsheet Membongkar Sistem Kemudi Tipe Rack And Pinion 1. Tujuan Siswa mengenal komponen sistem kemudi Tipe Rack and Pinion Siswa memahami cara kerja sistem kemudi Tipe Rack and Pinion Siswa mampu membongkar
SATUAN ACARA PERKULIAHAN
 SATUAN ACARA PERKULIAHAN Kode & Nama Mata Kuliah : OT 443. CHASSIS OTOMOTIF Topik Bahasan : Kumpulan bahan kajian dan perkuliahan yang menjamin kendaraan berjalan dengan aman dan nyaman Tujuan / Kompetensi
SATUAN ACARA PERKULIAHAN Kode & Nama Mata Kuliah : OT 443. CHASSIS OTOMOTIF Topik Bahasan : Kumpulan bahan kajian dan perkuliahan yang menjamin kendaraan berjalan dengan aman dan nyaman Tujuan / Kompetensi
STUDI PERBANDINGAN KARAKTERISTIK ANALISA KINEMATIKA AKIBAT PENGARUH SUDUT BELOK RODA DEPAN YANG VARIABEL TERHADAP STABILITAS KENDARAAN
 T E K N O S I M Ygyakarta, 1 Oktber STUDI PERBANDINGAN KARAKTERISTIK ANALISA KINEMATIKA AKIBAT PENGARUH SUDUT BELOK RODA DEPAN YANG VARIABEL TERHADAP STABILITAS KENDARAAN Ninuk Jnadji (1, Ian Hardiant
T E K N O S I M Ygyakarta, 1 Oktber STUDI PERBANDINGAN KARAKTERISTIK ANALISA KINEMATIKA AKIBAT PENGARUH SUDUT BELOK RODA DEPAN YANG VARIABEL TERHADAP STABILITAS KENDARAAN Ninuk Jnadji (1, Ian Hardiant
BAB I PENDAHULUAN. seiring dengan perkembangan serta kemajuan di bidang industri terutama dalam
 BAB I PENDAHULUAN 1.1 Latar Belakang Gokart saat ini sangat berkembang dalam ilmu pengetahuan dan teknologi, seiring dengan perkembangan serta kemajuan di bidang industri terutama dalam bidang otomotif.
BAB I PENDAHULUAN 1.1 Latar Belakang Gokart saat ini sangat berkembang dalam ilmu pengetahuan dan teknologi, seiring dengan perkembangan serta kemajuan di bidang industri terutama dalam bidang otomotif.
BAB II LANDASAN TEORI
 5 BAB II LANDASAN TEORI 2.1 System-Sytem pada Rear Axle Pada dasarnya rear axle berfungsi menghantarkan tenaga dari mesin untuk menuju ke poros roda penggerak. Seiring datangnya permasalahan yang timbul
5 BAB II LANDASAN TEORI 2.1 System-Sytem pada Rear Axle Pada dasarnya rear axle berfungsi menghantarkan tenaga dari mesin untuk menuju ke poros roda penggerak. Seiring datangnya permasalahan yang timbul
RANCANG BANGUN STRUKTUR RANGKA KENDARAAN HYBRID RODA TIGA
 1 RANCANG BANGUN STRUKTUR RANGKA KENDARAAN HYBRID RODA TIGA Agil Erbiansyah dan Prof. Ir. I Nyoman Sutantra M.Sc.,Ph.D. Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
1 RANCANG BANGUN STRUKTUR RANGKA KENDARAAN HYBRID RODA TIGA Agil Erbiansyah dan Prof. Ir. I Nyoman Sutantra M.Sc.,Ph.D. Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
BAB IV HASIL DAN PEMBAHASAN. II untuk sumbu x. Perasamaannya dapat dilihat di bawah ini :
 BAB IV HASIL DAN PEMBAHASAN 4.1 Analisa Perancangan Rem Persamaan umum untuk sistem pengereman menurut Hukum Newton II untuk sumbu x. Perasamaannya dapat dilihat di bawah ini : F = m. a Frem- F x = m.
BAB IV HASIL DAN PEMBAHASAN 4.1 Analisa Perancangan Rem Persamaan umum untuk sistem pengereman menurut Hukum Newton II untuk sumbu x. Perasamaannya dapat dilihat di bawah ini : F = m. a Frem- F x = m.
BAB III ANALISIS SISTEM SUSPENSI DEPAN
 35 BAB III ANALISIS SISTEM SUSPENSI DEPAN 3.1. Daftar Spesifikasi Kendaraan 1) Spesifikasi Kendaraan Toyota Kijang Innova 2.0 V M/T Tahun 2004 Tabel 3.1. Spesifikasi Kendaraan Toyota Kijang Innova 2.0
35 BAB III ANALISIS SISTEM SUSPENSI DEPAN 3.1. Daftar Spesifikasi Kendaraan 1) Spesifikasi Kendaraan Toyota Kijang Innova 2.0 V M/T Tahun 2004 Tabel 3.1. Spesifikasi Kendaraan Toyota Kijang Innova 2.0
Karateristik Perolehan Gaya Dorong Power Steering Pada Sistem Kemudi Kendaraan
 JURNAL TEKNIK MESIN Vol. 5, No. 1, Mei 2002: 16 21 Karateristik Perolehan Gaya Dorong Power Steering Pada Sistem Kemudi Kendaraan Joni Dewanto Dosen Fakultas Teknologi Industri, Jurusan Teknik Mesin Universitas
JURNAL TEKNIK MESIN Vol. 5, No. 1, Mei 2002: 16 21 Karateristik Perolehan Gaya Dorong Power Steering Pada Sistem Kemudi Kendaraan Joni Dewanto Dosen Fakultas Teknologi Industri, Jurusan Teknik Mesin Universitas
LAPORAN TUGAS AKHIR ANALISA PERILAKU ARAH SISTEM KEMUDI KENDARAAN GOKART DENGAN MESIN HONDA SUPRA X 110CC
 LAPORAN TUGAS AKHIR ANALISA PERILAKU ARAH SISTEM KEMUDI KENDARAAN GOKART DENGAN MESIN HONDA SUPRA X 110CC Diajukan Guna Memenuhi Syarat Kelulusan Mata Kuliah Tugas Akhir Pada Program Sarjana Strata Satu
LAPORAN TUGAS AKHIR ANALISA PERILAKU ARAH SISTEM KEMUDI KENDARAAN GOKART DENGAN MESIN HONDA SUPRA X 110CC Diajukan Guna Memenuhi Syarat Kelulusan Mata Kuliah Tugas Akhir Pada Program Sarjana Strata Satu
POROS PENGGERAK RODA
 SMK KARTANEGARA WATES KAB. KEDIRI SISTEM PEMINDAH TENAGA (SPT) POROS PENGGERAK RODA 34 PEMELIHARAAN / SERVICE POROS PENGGERAK RODA A. URAIAN Fungsi axle shaft adalah sebagai penumpu beban roda atau dudukan
SMK KARTANEGARA WATES KAB. KEDIRI SISTEM PEMINDAH TENAGA (SPT) POROS PENGGERAK RODA 34 PEMELIHARAAN / SERVICE POROS PENGGERAK RODA A. URAIAN Fungsi axle shaft adalah sebagai penumpu beban roda atau dudukan
Disusun Oleh : Novriza, S.Pd
 Modul Pembelajaran KODE MODUL 020 KK. 013 Disusun Oleh : Novriza, S.Pd BIDANG STUDI KEAHLIAN TEKNOLOGI DAN REKAYASA PROGRAM STUDI KEAHLIAN TEKNIK OTOMOTIF KOMPETENSI KEAHLIAN TEKNIK KENDARAAN RINGAN 1
Modul Pembelajaran KODE MODUL 020 KK. 013 Disusun Oleh : Novriza, S.Pd BIDANG STUDI KEAHLIAN TEKNOLOGI DAN REKAYASA PROGRAM STUDI KEAHLIAN TEKNIK OTOMOTIF KOMPETENSI KEAHLIAN TEKNIK KENDARAAN RINGAN 1
TUGAS AKHIR JURUSAN TEKNIK MESIN FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER S U R A B A Y A 2006
 TUGAS AKHIR JURUSAN TEKNIK MESIN FAKUTAS TEKNOOGI INDUSTRI INSTITUT TEKNOOGI SEPUUH NOPEMBER S U R A B A Y A 2006 ANAISA PERBANDINGAN KESTABIAN BEOK DAN ARAH KENDARAAN ANTARA DAIHATSU XENIA TYPE 1.3 DEUXE(Xi)
TUGAS AKHIR JURUSAN TEKNIK MESIN FAKUTAS TEKNOOGI INDUSTRI INSTITUT TEKNOOGI SEPUUH NOPEMBER S U R A B A Y A 2006 ANAISA PERBANDINGAN KESTABIAN BEOK DAN ARAH KENDARAAN ANTARA DAIHATSU XENIA TYPE 1.3 DEUXE(Xi)
ABSTRAK
 PENGARUH SUDUT CAMBER RODA DEPAN PADA KEMAMPUAN BELOK MOBIL MODEL 4 DAN 2 RODA PENGGERAK (4WD DAN RWD) Joni Dewanto dan Dicky Efendi Prodi Teknik Mesin, UK Petra, Surabaya Email: jdwanto@peter.petra.ac.id
PENGARUH SUDUT CAMBER RODA DEPAN PADA KEMAMPUAN BELOK MOBIL MODEL 4 DAN 2 RODA PENGGERAK (4WD DAN RWD) Joni Dewanto dan Dicky Efendi Prodi Teknik Mesin, UK Petra, Surabaya Email: jdwanto@peter.petra.ac.id
Analisa Kekuatan Material Velg Sepeda Motor Jenis Casting Wheel Terhadap Tumbukan dengan Variasi Kecepatan
 Tugas Akhir Analisa Kekuatan Material Velg Sepeda Motor Jenis Casting Wheel Terhadap Tumbukan dengan Variasi Kecepatan Oleh : Aldila Ningtyas 2108 100 003 Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik
Tugas Akhir Analisa Kekuatan Material Velg Sepeda Motor Jenis Casting Wheel Terhadap Tumbukan dengan Variasi Kecepatan Oleh : Aldila Ningtyas 2108 100 003 Dosen Pembimbing : Ir. J. Lubi Jurusan Teknik
Smart Chassis System Berbasis Proporsi Kontrol Traksi dan Pengereman I Ketut Adi Atmika
 Smart Chassis System Berbasis Proporsi Kontrol Traksi dan Pengereman I Ketut Adi Atmika Jurusan Teknik Mesin Fakultas Teknik Universitas Udayana Kampus Bukit Jimbaran, Bali, Indonesia Email: tutadi2001@yahoo.com
Smart Chassis System Berbasis Proporsi Kontrol Traksi dan Pengereman I Ketut Adi Atmika Jurusan Teknik Mesin Fakultas Teknik Universitas Udayana Kampus Bukit Jimbaran, Bali, Indonesia Email: tutadi2001@yahoo.com
BAB IV PERHITUNGAN HIDRAULIK
 BAB IV PERHITUNGAN HIDRAULIK.1. Perhitungan Silinder-silinder Hidraulik.1.1. Kecepatan Rata-rata Menurut Audel Pumps dan Compressor Hand Book by Frank D. Graha dan Tara Poreula, kecepatan piston dipilih
BAB IV PERHITUNGAN HIDRAULIK.1. Perhitungan Silinder-silinder Hidraulik.1.1. Kecepatan Rata-rata Menurut Audel Pumps dan Compressor Hand Book by Frank D. Graha dan Tara Poreula, kecepatan piston dipilih
SUSPENSI (suspension)
") SUSPENSI (suspension) Suspensi adalah mekanisme yang dipasang di antara body dan roda yang berfungsi untuk menciptakan kestabilan kendaraan (nyaman dan aman) Unsur kestabilan kendaraan : 1. Stabil pengendaraannya
SUSPENSI (suspension) Suspensi adalah mekanisme yang dipasang di antara body dan roda yang berfungsi untuk menciptakan kestabilan kendaraan (nyaman dan aman) Unsur kestabilan kendaraan : 1. Stabil pengendaraannya
BAB 1 PENDAHULUAN 1.1 Latar Belakang
 BAB 1 PENDAHULUAN 1.1 Latar Belakang Perkembangan otomotif yang berkembang pesat pada abad ini memunculkan tuntutan yang seakin besar Dari tingkat keamanan sampai kenyamanan. Dalam desain Otomotif selalu
BAB 1 PENDAHULUAN 1.1 Latar Belakang Perkembangan otomotif yang berkembang pesat pada abad ini memunculkan tuntutan yang seakin besar Dari tingkat keamanan sampai kenyamanan. Dalam desain Otomotif selalu
Bab 4 Perancangan Perangkat Gerak Otomatis
 Bab 4 Perancangan Perangkat Gerak Otomatis 4. 1 Perancangan Mekanisme Sistem Penggerak Arah Deklinasi Komponen penggerak yang dipilih yaitu ball, karena dapat mengkonversi gerakan putaran (rotasi) yang
Bab 4 Perancangan Perangkat Gerak Otomatis 4. 1 Perancangan Mekanisme Sistem Penggerak Arah Deklinasi Komponen penggerak yang dipilih yaitu ball, karena dapat mengkonversi gerakan putaran (rotasi) yang
Sistem Suspensi pada Truck
 Sistem Suspensi pada Truck Halaman 1 dari 4 Fungsi utama sistem suspensi pada kendaraan adalah mendukung berat kendaraan untuk diteruskan ke tanah (ground). Fungsi lain adalah melindungi badan kendaraan
Sistem Suspensi pada Truck Halaman 1 dari 4 Fungsi utama sistem suspensi pada kendaraan adalah mendukung berat kendaraan untuk diteruskan ke tanah (ground). Fungsi lain adalah melindungi badan kendaraan
Setelah mengikuti pelajaran ini peserta dapat mengetahui fungsi wheel alignment.
 CHASIS WHEEL ALIGNMENT Tujuan Instruksional Umum : Setelah mengikuti pelajaran ini peserta dapat mengetahui fungsi wheel alignment. Tujuan Instruksional Khusus : 1. Peserta dapat menyebutkan definisi,
CHASIS WHEEL ALIGNMENT Tujuan Instruksional Umum : Setelah mengikuti pelajaran ini peserta dapat mengetahui fungsi wheel alignment. Tujuan Instruksional Khusus : 1. Peserta dapat menyebutkan definisi,
JURNAL TEKNIK ITS Vol. 5, No.21, (2016) ISSN: E103
 ISSN: E103") JURNA TEKNIK ITS Vol. 5, No.1, (016) ISSN: 301-971 E103 Analisis Pengaruh Parameter Operasional dan Penggunaan Stabilizer terhadap Perilaku Arah Belok Mobil Toyota Fortuner 4.0 V6 SR (AT 4X4) Deva Andriansyah
JURNA TEKNIK ITS Vol. 5, No.1, (016) ISSN: 301-971 E103 Analisis Pengaruh Parameter Operasional dan Penggunaan Stabilizer terhadap Perilaku Arah Belok Mobil Toyota Fortuner 4.0 V6 SR (AT 4X4) Deva Andriansyah
BAB IV KONSEP PERANCANGAN A. TATARAN LINGKUNGAN KOMUNITAS
 BAB IV KONSEP PERANCANGAN A. TATARAN LINGKUNGAN KOMUNITAS Sebuah rancangan selain mempunyai dampak terhadap tataran lingkungan juga ada keterhubungan dengan tataran komunitas, yaitu siapa yang akan menggunakan
BAB IV KONSEP PERANCANGAN A. TATARAN LINGKUNGAN KOMUNITAS Sebuah rancangan selain mempunyai dampak terhadap tataran lingkungan juga ada keterhubungan dengan tataran komunitas, yaitu siapa yang akan menggunakan
SUSPENSI DAN KEMUDI SEPEDA MOTOR
 SUSPENSI DAN KEMUDI SEPEDA MOTOR TEORI SECARA UMUM SISTIM SUSPENSI Sistim suspensi biasanya ditempatkan diantara frame dan poros roda. Pada umumnya dilengkapi dengan shock absorber. Sistim suspensi terletak
SUSPENSI DAN KEMUDI SEPEDA MOTOR TEORI SECARA UMUM SISTIM SUSPENSI Sistim suspensi biasanya ditempatkan diantara frame dan poros roda. Pada umumnya dilengkapi dengan shock absorber. Sistim suspensi terletak
REKONDISI SISTEM KEMUDI DAN SISTEM SUSPENSI MOBIL TOYOTA HIACE PROYEK AKHIR
 REKONDISI SISTEM KEMUDI DAN SISTEM SUSPENSI MOBIL TOYOTA HIACE PROYEK AKHIR Diajukan Kepada Fakultas Teknik Universitas Negeri Yogyakarta Untuk Memenuhi Sebagian Persyaratan Guna Memperoleh Gelar Ahli
REKONDISI SISTEM KEMUDI DAN SISTEM SUSPENSI MOBIL TOYOTA HIACE PROYEK AKHIR Diajukan Kepada Fakultas Teknik Universitas Negeri Yogyakarta Untuk Memenuhi Sebagian Persyaratan Guna Memperoleh Gelar Ahli
ANALISIS KESTABILAN KENDARAAN MINI TRUCK SANG SURYA PADA SAAT MEMBELOK
 NASKAH PUBLIKASI KARYA ILMIAH ANALISIS KESTABILAN KENDARAAN MINI TRUCK SANG SURYA PADA SAAT MEMBELOK Disusun Untuk Memenuhi Sebagai Persyaratan Memperoleh Derajat Sarjana S1 pada Jurusan Teknik Mesin Fakultas
NASKAH PUBLIKASI KARYA ILMIAH ANALISIS KESTABILAN KENDARAAN MINI TRUCK SANG SURYA PADA SAAT MEMBELOK Disusun Untuk Memenuhi Sebagai Persyaratan Memperoleh Derajat Sarjana S1 pada Jurusan Teknik Mesin Fakultas
MODIFIKASI SISTEM STEERING CHEVROLET LUV MENJADI POWER STEERING
 MODIFIKASI SISTEM STEERING CHEVROLET LUV MENJADI POWER STEERING MODIFIKASI SISTEM STEERING CHEVROLET LUV MENJADI POWER STEERING PROYEK AKHIR Diajukan sebagai salah satu syarat untuk memperoleh gelar Ahli
MODIFIKASI SISTEM STEERING CHEVROLET LUV MENJADI POWER STEERING MODIFIKASI SISTEM STEERING CHEVROLET LUV MENJADI POWER STEERING PROYEK AKHIR Diajukan sebagai salah satu syarat untuk memperoleh gelar Ahli
teknologi yang menggunakan bahan bakar yang ramah lingkungan. kendaraan antara 220 cm dan 350 cm. (Regulasi IEMC 2014)
") BAB 1 PENDAHULUAN 1.1 Latar Belakang Saat ini semua pabrikan otomotif di dunia berlomba-lomba untuk membuat produk otomotif yang hemat bahan bakar dan atau menggunakan bahan bakar alternative selain minyak
BAB 1 PENDAHULUAN 1.1 Latar Belakang Saat ini semua pabrikan otomotif di dunia berlomba-lomba untuk membuat produk otomotif yang hemat bahan bakar dan atau menggunakan bahan bakar alternative selain minyak
Analisis Kenyamanan serta Redesain Pegas Suspensi Mobil Toyota Fortuner 4.0 V6 SR (AT 4x4)
") Analisis Kenyamanan serta Redesain Pegas Suspensi Mobil Toyota Fortuner 4.0 V6 SR (AT 4x4) Puja Priyambada dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
Analisis Kenyamanan serta Redesain Pegas Suspensi Mobil Toyota Fortuner 4.0 V6 SR (AT 4x4) Puja Priyambada dan I Nyoman Sutantra Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh
ANALISIS STRUKTURAL PERFORMA CHASSIS SAPUANGIN SPEED Oleh : Muhammad Fadlil Adhim
 ANALISIS STRUKTURAL PERFORMA CHASSIS SAPUANGIN SPEED 2013 Oleh : Muhammad Fadlil Adhim 2110100703 Latar Belakang Partisipasi ITS Team Sapuangin di ajang Student Formula Japan 2013 BAGIAN YANG ENGINE MENENTUKAN
ANALISIS STRUKTURAL PERFORMA CHASSIS SAPUANGIN SPEED 2013 Oleh : Muhammad Fadlil Adhim 2110100703 Latar Belakang Partisipasi ITS Team Sapuangin di ajang Student Formula Japan 2013 BAGIAN YANG ENGINE MENENTUKAN