PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER
|
|
|
- Yulia Agusalim
- 6 tahun lalu
- Tontonan:
Transkripsi
1 TUGAS AKHIR TE PERANCANGAN KONTROLER KASKADE FUZZY UNTUK PENGATURAN TEKANAN PADA PRESSURE CONTROL TRAINER Nur Muhlis NRP JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2011
2 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN Latar Belakang Permasalahan Tujuan Sistem kontrol pneumatik tekanan rendah secara luas telah diterapkan pada teknologi sistem kontrol industri Perubahan variasi beban dan gangguan pada teknologi elektro-pneumatik dapat menyebabkan respon sistem tidak sesuai dengan kriteria yang diharapkan Salah satu dari teknologi elektro-pneumatik adalah sistem pressure control trainer
3 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN Latar Belakang Permasalahan Tujuan Mempertahankan respon sistem agar tetap mengikuti nilai setpoint meskipun terjadi perubahan parameter dari plant
4 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN Latar Belakang Permasalahan Tujuan Sistem pressure control trainer tetap mengikuti nilai setpoint dan memiliki respon yang cepat terhadap perubahan beban Memiliki error steady state yang kecil bila menggunakan kontroler kaskade fuzzy
5 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN Plant Logika Fuzzy Kaskade 4-20 ma Sinyal Pengatur Katup 4-20 ma Sinyal Aliran 4-20 ma Sinyal Tekanan Katup 6 Katup 5 Katup 4 Pengatur Tekanan 1 I/P Pengubah Arus ke Pneumatik Sensor Aliran Sensor Tekanan Katup 3 Katup 2 Penampung Udara Kompresor Pengatur Tekanan 2 Kontrol Katup Pneumatik Orifice Katup 1
6 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN Plant Logika Fuzzy Kaskade Rule Base Masukan Fuzzifikasi Inference Engine Defuzzifikasi Keluaran Fuzzy metode Takagi-Sugeno adalah metode fuzzy yang keluaran sistem nya tidak berupa himpunan fuzzy, melainkan berupa konstanta atau persamaan linear
7 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN Plant Logika Fuzzy Kaskade Tujuan Mengurangi pengaruh gangguan Meningkatkan atau memperbaiki kedinamisan performasi sistem kendali

8 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN Sinyal Statis Sinyal Dinamis Hasil Antarmuka untuk proses identifikasi
9 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN Sinyal Statis Sinyal Dinamis Hasil Respon Plant Tekanan Respon Plant Aliran N.ts > tr (2N-1).ts < L Nilai Minimal ts dan L dari PRBS

10 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN Sinyal Statis Sinyal Dinamis Hasil Bentuk Sinyal PRBS Respon Plant Tekanan Respon Plant Aliran
11 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN Sinyal Statis Sinyal Dinamis Hasil (a) (b) Perbandingan Bentuk Respon Plant dan model (a) Tekanan (b) Aliran
12 Fungsi Alih Model PENDAHULUAN IMPLEMENTASI IDENTIFIKASI KESIMPULAN PERANCANGAN DASAR TEORI Hasil Sinyal Dinamis Sinyal Statis ,439 0, , z z z 0, ,9821 0,4779 0, z z z , z z z 0, ,9558 0,4187 0, z z z 0,2837 0, , z z z 0, ,9571 0,4433 0,46 2 z z z Maksimal Nominal Minimal Aliran Tekanan Fungsi Alih Model Plant Beban
13 Pendahuluan Menentukan susunan kaskade yang dipergunakan Menyusun kontroler pada masing-masing loop secara terpisah Menyusun kontroler yang telah dibuat dalam susunan kaskade

14 Pendahuluan Fuzzy PI dipilih karena memiliki performansi yang baik untuk mengurangi steady state error

15 Pendahuluan Penulisan Algoritma Program
16 Pendahuluan Fuzzifikasi Bentuk Membership Function e(k) = SP(k) Y(k) de(k) = e(k) e(k-1)
17 Pendahuluan NB NM NS Z PS PM PB 1 Pemilihan Bentuk Membership Function /3-1/3 0 1/3 2/3 1 NB NM NS Z PS PM PB NB NM NS Z PS PM PB
18 Pendahuluan Rule Base e de NB NM NS Z PS PM PB NB NB NB NB NM NS NS Z NM NB NM NM NM NS Z PS NS NB NM NS NS Z PS PM Z NB NM NS Z PS PM PB PS NM NS Z PS PS PM PB PM NS Z PS PM PM PM PB PB Z PS PS PM PB PB PB Rule Base
19 Pendahuluan Inference Engine u ( 1) * w(1) (2) * w(2) (3) * w(3) (4) * (1) (2) (3) (4) w (4) Weighing Average

![error domain 2 [e s ] Fuzzifikasi de s Domain : NB,NM,NS,Z,PS,PM,PB μ rate error domain 1 [de s ]](/docs-images/67/57026724/images/20-3.jpg "μ rate error domain 2 [de s ] Pendahuluan A u = B Rule Base Menggunakan Logika AND w (1), w (2),")
 + μ (3) + μ (4) Fuzzy PI u PI (k) = u PI (k-1)+ki * u(k) Plant Aliran Di dapat nilai Y s")
20 Diagram Alir START e s = 0; de s = 0; SP2 = 0; Y s = 0 memasukkan SP2 Baca Data nilai Y s e s = SP2 Y s de s = e s -ê s Fuzzifikasi e s Domain : NB,NM,NS,Z,PS,PM,PB μ error domain 1 [e s ] μ error domain 2 [e s ] Fuzzifikasi de s Domain : NB,NM,NS,Z,PS,PM,PB μ rate error domain 1 [de s ] μ rate error domain 2 [de s ] Pendahuluan A u = B Rule Base Menggunakan Logika AND w (1), w (2), w (3), w (4) Inference Engine μ (1) * w (1) + μ (2) *w (2) + μ (3) * w (3) + μ (4) * w (4) μ (1) + μ (2) + μ (3) + μ (4) Fuzzy PI u PI (k) = u PI (k-1)+ki * u(k) Plant Aliran Di dapat nilai Y s A B END
21 Pendahuluan Fuzzifikasi Bentuk Membership Function e(k) = SP(k) Y(k) de(k) = e(k) e(k-1)
22 Pendahuluan NB NM NS Z PS PM PB 1 Pemilihan Bentuk Membership Function /3-1/3 0 1/3 2/3 1 NB NM NS Z PS PM PB NB NM NS Z PS PM PB
23 Pendahuluan Rule Base e de NB NM NS Z PS PM PB NB NB NB NB NM NS NS Z NM NB NM NM NM NS Z PS NS NB NM NS NS Z PS PM Z NB NM NS Z PS PM PB PS NM NS Z PS PS PM PB PM NS Z PS PM PM PM PB PB Z PS PS PM PB PB PB Rule Base
24 Pendahuluan Inference Engine u ( 1) * w(1) (2) * w(2) (3) * w(3) (4) * (1) (2) (3) (4) w (4) Weighing Average


![p ] Fuzzifikasi de p Domain : NB,NM,NS,Z,PS,PM,PB μ rate error domain 1](/docs-images/67/57026724/images/25-2.jpg "[de p ] μ rate error domain 2 [de p ] u = Inference Engine μ (1) * w (1)")
 Fuzzy PI u PI (k) = u PI (k-1)+ki * u(k) Plant Tekanan Di dapat nilai")
25 Diagram Alir START e p = 0; de p = 0; SP1 = 0; Y p = 0 memasukkan SP1 Baca Data nilai Y p Pendahuluan C D Rule Base Menggunakan Logika AND w (1), w (2), w (3), w (4) e p = SP1 Y p de p = e p -ê p Fuzzifikasi e p Domain : NB,NM,NS,Z,PS,PM,PB μ error domain 1 [e p ] μ error domain 2 [e p ] Fuzzifikasi de p Domain : NB,NM,NS,Z,PS,PM,PB μ rate error domain 1 [de p ] μ rate error domain 2 [de p ] u = Inference Engine μ (1) * w (1) + μ (2) *w (2) + μ (3) * w (3) + μ (4) * w (4) μ (1) + μ (2) + μ (3) + μ (4) Fuzzy PI u PI (k) = u PI (k-1)+ki * u(k) Plant Tekanan Di dapat nilai Y p C D END
26 Pendahuluan Blok Diagram


27 Diagram Alir Pendahuluan
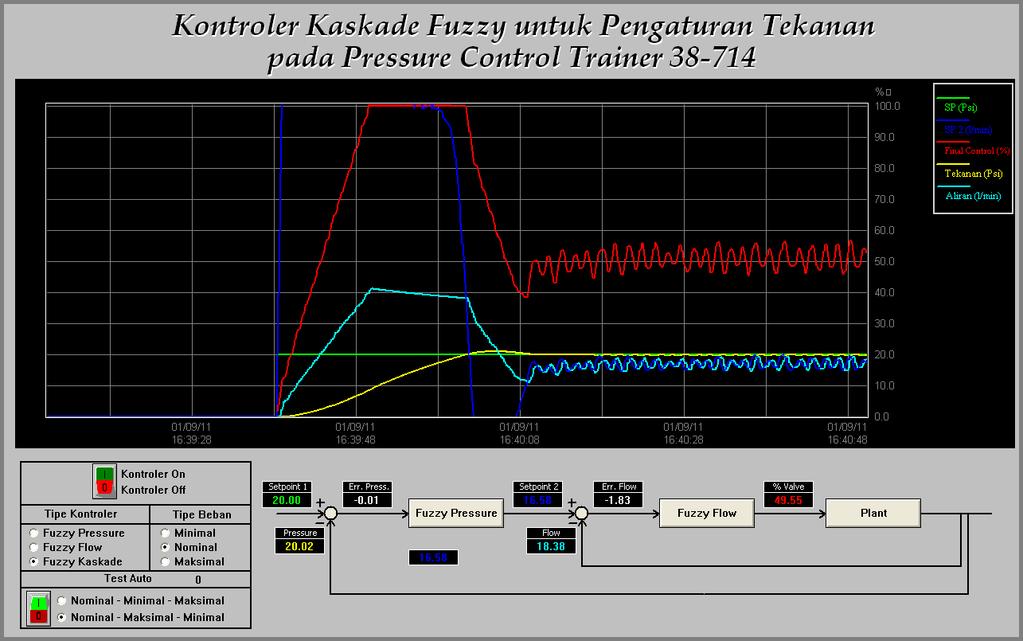
28 Pendahuluan Tampilan
29 Simulasi Implementasi
30 Simulasi Implementasi Respon Aliran dengan kontroler Sekunder kes 2 kdes 2 ki s 5
31 Simulasi Implementasi Respon Tekanan dengan kontroler Primer ke p 0,17 kde 6 ki p 20 p
32 Simulasi Implementasi Performansi pada Simulasi
33 Simulasi Implementasi (a) (b) Respon Plant dengan Menggunakan Fuzzy (a) Tekanan (b) Aliran
34 Simulasi Implementasi Performansi Fuzzy pada Simulasi

35 Simulasi Implementasi Antarmuka untuk proses Implementasi
36 Simulasi Implementasi Agar dapat diimplementasikan pada plant maka diperlukan penyesuaian gain dari kontroler kes 2 kdes 2 ki s 1 ke p 0,08 kde p 3 ki p 3, 5
37 Simulasi Implementasi Respon Plant dengan Menggunakan
38 Simulasi Implementasi Respon Plant dengan Menggunakan
39 Simulasi Implementasi (a) (b) Respon Plant dengan Menggunakan Fuzzy (a) Tekanan (b) Aliran
40 Simulasi Implementasi Perbandingan Kontroler Tunggal dengan Kaskade Perbandingan Performansi Kontroler Fuzzy Tunggal dan Fuzzy
41 PENDAHULUAN DASAR TEORI IDENTIFIKASI PERANCANGAN IMPLEMENTASI KESIMPULAN fuzzy dalam penelitian ini mampu mengurangi nilai overshoot dan waktu steady state. hal ini bila dibandingkan dengan kontroler fuzzy tunggal Perubahan bentuk membership function pada kontroler primer tidak terlalu signifikan terhadap hasil respon, sedangkan pada perubahan bentuk membership function pada kontroler sekunder berpengaruh terhadap hasil respon Meskipun hasil perancangan pada kontroler sekunder pada saat keadaan steady state memiliki nilai osilasi yang besar, kontroler sekunder tersebut tetap bisa diterapkan pada susunan kontroler kaskade fuzzy Kontroler kaskade fuzzy mampu mengendalikan tekanan pada plant pressure control trainer
42 Terima Kasih
JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER
 Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta 24 08 100 068 Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK
Rancang Bangun Kontrol Logika Fuzzy-PID Pada Plant Pengendalian ph (Studi Kasus : Asam Lemah dan Basa Kuat) Oleh : Fista Rachma Danianta 24 08 100 068 Dosen Pembimbing Hendra Cordova ST, MT. JURUSAN TEKNIK
Teknik Sistem Pengaturan Teknik Elektro - Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
 Teknik Sistem Pengaturan Teknik Elektro - Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Perancangan Kontroler Fuzzy PD untuk Kontrol Toleransi Kesalahan Sensor Oleh Moch Hafid [2211 106
Teknik Sistem Pengaturan Teknik Elektro - Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Perancangan Kontroler Fuzzy PD untuk Kontrol Toleransi Kesalahan Sensor Oleh Moch Hafid [2211 106
SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KONTROL BERBASIS LOGIKA FUZZY UNTUK MENGHINDARI BENDA ASING DI PERAIRAN TANJUNG PERAK
 SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KONTROL BERBASIS LOGIKA FUZZY UNTUK MENGHINDARI BENDA ASING DI PERAIRAN TANJUNG PERAK Oleh: Anita Faruchi 2407 100 048 Dosen Pembimbing: Dr. Ir. Aulia Siti Aisyah,
SEMINAR TUGAS AKHIR PERANCANGAN SISTEM KONTROL BERBASIS LOGIKA FUZZY UNTUK MENGHINDARI BENDA ASING DI PERAIRAN TANJUNG PERAK Oleh: Anita Faruchi 2407 100 048 Dosen Pembimbing: Dr. Ir. Aulia Siti Aisyah,
DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID BERBASIS PLC PADA SISTEM KONTROL LEVEL CAIRAN COUPLED-TANK
 TUGAS AKHIR TE091399 Teknik Sistem Pengaturan Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013 DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID
TUGAS AKHIR TE091399 Teknik Sistem Pengaturan Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 2013 DESAIN DAN IMPLEMENTASI KONTROLER FUZZY-SUPERVISED PID
ANALISA SISTEM KENDALI FUZZY PADA CONTINUOUSLY VARIABLE TRANSMISSION (CVT) DENGAN DUA PENGGERAK PUSH BELT UNTUK MENINGKATKAN KINERJA CVT
 DENGAN DUA PENGGERAK PUSH BELT UNTUK MENINGKATKAN KINERJA CVT") ANALISA SISTEM KENDALI FUZZY PADA CONTINUOUSLY VARIABLE TRANSMISSION (CVT) DENGAN DUA PENGGERAK PUSH BELT UNTUK MENINGKATKAN KINERJA CVT Oleh : Agung Prasetya Adhayatmaka NRP 2108100521 Dosen Pembimbing
ANALISA SISTEM KENDALI FUZZY PADA CONTINUOUSLY VARIABLE TRANSMISSION (CVT) DENGAN DUA PENGGERAK PUSH BELT UNTUK MENINGKATKAN KINERJA CVT Oleh : Agung Prasetya Adhayatmaka NRP 2108100521 Dosen Pembimbing
DAFTAR ISI. HALAMAN JUDUL... i. LEMBAR PENGESAHAN PEMBIMBING... ii. LEMBAR PENGESAHAN DOSEN PENGUJI... iii. HALAMAN PERSEMBAHAN...
 DAFTAR ISI HALAMAN JUDUL... i LEMBAR PENGESAHAN PEMBIMBING... ii LEMBAR PENGESAHAN DOSEN PENGUJI... iii HALAMAN PERSEMBAHAN... iv HALAMAN MOTTO... v KATA PENGANTAR... vii ABSTAKSI... ix DAFTAR ISI... x
DAFTAR ISI HALAMAN JUDUL... i LEMBAR PENGESAHAN PEMBIMBING... ii LEMBAR PENGESAHAN DOSEN PENGUJI... iii HALAMAN PERSEMBAHAN... iv HALAMAN MOTTO... v KATA PENGANTAR... vii ABSTAKSI... ix DAFTAR ISI... x
Herry gunawan wibisono Pembimbing : Ir. Syamsul Arifin, MT
 PERANCANGAN SISTEM PENGENDALIAN DAYA REAKTOR NUKLIR MENGGUNAKAN LOGIKA FUZZY DI PUSAT TEKNOLOGI NUKLIR BAHAN DAN RADIOMETRI BADAN TENAGA NUKLIR NASIONAL (PTNBR BATAN) BANDUNG Herry gunawan wibisono 2406
PERANCANGAN SISTEM PENGENDALIAN DAYA REAKTOR NUKLIR MENGGUNAKAN LOGIKA FUZZY DI PUSAT TEKNOLOGI NUKLIR BAHAN DAN RADIOMETRI BADAN TENAGA NUKLIR NASIONAL (PTNBR BATAN) BANDUNG Herry gunawan wibisono 2406
Abdul Halim Dosen Pembimbing Dr. Trihastuti Agustinah, ST., MT
 Abdul Halim 22 05 053 Dosen Pembimbing Dr. Trihastuti Agustinah, ST., T JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 203 PENDAHULUAN PERANCANGAN HASIL
Abdul Halim 22 05 053 Dosen Pembimbing Dr. Trihastuti Agustinah, ST., T JURUSAN TEKNIK ELEKTRO Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya 203 PENDAHULUAN PERANCANGAN HASIL
Adaptive Fuzzy Untuk Menala Parameter PID pada Sistem Pengaturan Berjaringan. Nastiti Puspitosari L/O/G/O NETWORKED CONTROL SYSTEM (NCS)
") L/O/G/O NETWORKED CONTROL SYSTEM (NCS) Adaptive Fuzzy Untuk Menala Parameter PID pada Sistem Pengaturan Berjaringan Nastiti Puspitosari 2208100039 BIDANG STUDI TEKNIK SISTEM PENGATURAN - ITS TOPIK PEMBAHASAN
L/O/G/O NETWORKED CONTROL SYSTEM (NCS) Adaptive Fuzzy Untuk Menala Parameter PID pada Sistem Pengaturan Berjaringan Nastiti Puspitosari 2208100039 BIDANG STUDI TEKNIK SISTEM PENGATURAN - ITS TOPIK PEMBAHASAN
PENERAPAN FUZZY LOGIC CONTROLLER UNTUK MEMPERTAHANKAN KESETABILAN SISTEM AKIBAT PERUBAHAN DEADTIME PADA SISTEM KONTROL PROSES DENGAN DEADTIME
 PENERAPAN FUZZY LOGIC CONTROLLER UNTUK MEMPERTAHANKAN KESETABILAN SISTEM AKIBAT PERUBAHAN DEADTIME PADA SISTEM KONTROL PROSES DENGAN DEADTIME Mukhtar Hanafi Program Studi Teknik Informatika Fakultas Teknik
PENERAPAN FUZZY LOGIC CONTROLLER UNTUK MEMPERTAHANKAN KESETABILAN SISTEM AKIBAT PERUBAHAN DEADTIME PADA SISTEM KONTROL PROSES DENGAN DEADTIME Mukhtar Hanafi Program Studi Teknik Informatika Fakultas Teknik
Disain Kontroler Kaskade Pada Sistem Pressure Process Trainer Feedback
 Disain Kontroler Kaskade Pada Sistem Pressure Process Trainer Feedback 38-74 Risfendra, Katjuk Astrowulan dan Ali Fatoni Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember (ITS) Surabaya Email:
Disain Kontroler Kaskade Pada Sistem Pressure Process Trainer Feedback 38-74 Risfendra, Katjuk Astrowulan dan Ali Fatoni Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember (ITS) Surabaya Email:
Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid
 Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid Made Rahmawaty, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Stabilisasi Robot Pendulum Terbalik Beroda Dua Menggunakan Kontrol Fuzzy Hybrid Made Rahmawaty, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini. Helmi Wiratran
 Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini 1 Helmi Wiratran 2209105020 2 Latarbelakang (1) Segway PT: Transportasi alternatif dengan
Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini 1 Helmi Wiratran 2209105020 2 Latarbelakang (1) Segway PT: Transportasi alternatif dengan
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api
 Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
DESAIN SISTEM KENDALI TEMPERATUR UAP SUPERHEATER DENGAN METODE FUZZY SLIDING MODE CONTROL
 J. Math. and Its Appl. ISSN: 1829-605X Vol. 13, No. 1, Mei 2016, 37-48 DESAIN SISTEM KENDALI TEMPERATUR UAP SUPERHEATER DENGAN METODE FUZZY SLIDING MODE CONTROL Mardlijah 1, Mardiana Septiani 2,Titik Mudjiati
J. Math. and Its Appl. ISSN: 1829-605X Vol. 13, No. 1, Mei 2016, 37-48 DESAIN SISTEM KENDALI TEMPERATUR UAP SUPERHEATER DENGAN METODE FUZZY SLIDING MODE CONTROL Mardlijah 1, Mardiana Septiani 2,Titik Mudjiati
Proceeding Tugas Akhir-Januari
 Proceeding Tugas Akhir-Januari 214 1 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman, Trihastuti Agustinah Jurusan Teknik Elektro,
Proceeding Tugas Akhir-Januari 214 1 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman, Trihastuti Agustinah Jurusan Teknik Elektro,
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: ( Print) B-58
 ISSN: ( Print) B-58") JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-58 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman,
JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-58 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman,
Pengaturan Kecepatan Motor Induksi Tiga Fasa dengan Metode PID Self Tuning Berdasarkan Fuzzy pada Rancangan Mobil Hybrid
 Pengaturan Kecepatan Motor Induksi Tiga Fasa dengan Metode PID Self Tuning Berdasarkan Fuzzy pada Rancangan Mobil Hybrid Septian Ekavandy #, Dedid Cahya Happyanto #2 # Jurusan Teknik Elektronika, Politeknik
Pengaturan Kecepatan Motor Induksi Tiga Fasa dengan Metode PID Self Tuning Berdasarkan Fuzzy pada Rancangan Mobil Hybrid Septian Ekavandy #, Dedid Cahya Happyanto #2 # Jurusan Teknik Elektronika, Politeknik
Perancangan Dan Implementasi Sistem Pengaturan Kecepatan Motor Bldc Menggunakan Kontroler Pi Berbasiskan Neural-Fuzzy Hibrida Adaptif
 F68 Perancangan Dan Implementasi Sistem Pengaturan Kecepatan Motor Bldc Menggunakan Kontroler Pi Berbasiskan Neural-Fuzzy Hibrida Adaptif Agung Setyadi Wicaksono, Rushdianto Effendie A. K., dan Eka Iskandar
F68 Perancangan Dan Implementasi Sistem Pengaturan Kecepatan Motor Bldc Menggunakan Kontroler Pi Berbasiskan Neural-Fuzzy Hibrida Adaptif Agung Setyadi Wicaksono, Rushdianto Effendie A. K., dan Eka Iskandar
IDENTIFIKASI DAN DESAIN CONTROLLER PADA TRAINER FEEDBACK PRESSURE PROCESS RIG Satryo Budi Utomo, Universitas Jember
 IDENTIFIKASI DAN DESAIN CONTROLLER PADA TRAINER FEEDBACK PRESSURE PROCESS RIG 38 714 Abstrac Satryo Budi Utomo, Universitas Jember Satryo.budiutomo@yahoo.com Pressure Process Control of Trainer studying
IDENTIFIKASI DAN DESAIN CONTROLLER PADA TRAINER FEEDBACK PRESSURE PROCESS RIG 38 714 Abstrac Satryo Budi Utomo, Universitas Jember Satryo.budiutomo@yahoo.com Pressure Process Control of Trainer studying
DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY
 DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY Reza Dwi Imami *), Aris Triwiyatno, and Sumardi Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus
DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY Reza Dwi Imami *), Aris Triwiyatno, and Sumardi Jurusan Teknik Elektro, Universitas Diponegoro Semarang Jl. Prof. Sudharto, SH, Kampus
DESAIN KONTROLER FUZZY UNTUK SISTEM GANTRY CRANE
 DESAIN KONTROLER FUZZY UNTUK SISTEM GANTRY CRANE Rosita Melindawati (2211106002) Pembimbing : Dr. Trihastuti Agustinah, ST., MT. Bidang Studi Teknik Sistem Pengaturan JURUSAN TEKNIK ELEKTRO Fakultas Teknologi
DESAIN KONTROLER FUZZY UNTUK SISTEM GANTRY CRANE Rosita Melindawati (2211106002) Pembimbing : Dr. Trihastuti Agustinah, ST., MT. Bidang Studi Teknik Sistem Pengaturan JURUSAN TEKNIK ELEKTRO Fakultas Teknologi
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2012) 1-6 1
 1-6 1") JURNAL TEKNIK POMITS Vol. 1, No. 1, (212) 1-6 1 Perancangan Sistem Pengendalian Tekanan dan Laju Aliran pada Pipa Bahan Bakar untuk Kebutuhan Awal Pembakaran Gas Turbin di Pembangkit Listrik Tenaga Gas
JURNAL TEKNIK POMITS Vol. 1, No. 1, (212) 1-6 1 Perancangan Sistem Pengendalian Tekanan dan Laju Aliran pada Pipa Bahan Bakar untuk Kebutuhan Awal Pembakaran Gas Turbin di Pembangkit Listrik Tenaga Gas
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER
 BERBASIS LOGIC SOLVER") PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
PERANCANGAN SISTEM PENGENDALIAN PEMBAKARAN PADA DUCTBURNER WASTE HEAT BOILER (WHB) BERBASIS LOGIC SOLVER Oleh : AMRI AKBAR WICAKSONO (2406 100 002) Pembimbing: IBU RONNY DWI NORIYATI & BAPAK TOTOK SOEHARTANTO
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER
 KONTROLER") SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
SISTEM PENGATURAN MOTOR DC MENGGUNAKAN PROPOTIONAL IINTEGRAL DEREVATIVE (PID) KONTROLER Nursalim Jurusan Teknik Elektro, Fakultas Sains dan Teknik, Universitas Nusa Cendana Jl. Adisucipto-Penfui Kupang,
Perancangan Sistem Kontrol Sandar Kapal Otomatis Berbasis Logika Fuzzy di Pelabuhan Tanjung Perak Surabaya
 JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2337-3539 (2301-9271 Print) E-57 Perancangan Sistem Kontrol Sandar Kapal Otomatis Berbasis Logika Fuzzy di Pelabuhan Tanjung Perak Surabaya Randika Gunawan,
JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2337-3539 (2301-9271 Print) E-57 Perancangan Sistem Kontrol Sandar Kapal Otomatis Berbasis Logika Fuzzy di Pelabuhan Tanjung Perak Surabaya Randika Gunawan,
SIMULASI DAN ANALISIS RESPON FUZZY LOGIC CONTROLLER PADA SISTEM SUSPENSI. Sunarno 1, Rohmad 2
 SIMULASI DAN ANALISIS RESPON FUZZY LOGIC CONTROLLER PADA SISTEM SUSPENSI Sunarno 1, Rohmad 2 (1),(2) Jurusan Fisika, Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Semarang, Semarang,
SIMULASI DAN ANALISIS RESPON FUZZY LOGIC CONTROLLER PADA SISTEM SUSPENSI Sunarno 1, Rohmad 2 (1),(2) Jurusan Fisika, Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Semarang, Semarang,
Kontroler Fuzzy-PI untuk Plant Coupled-Tank
 Kontroler Fuzzy-PI untuk Plant Coupled-Tank Mochamad Nur Qomarudin 1 Surabaya, 4 Mei 2013 Abstrak Saya awali dokumen ini dengan Nama Alloh, Tuhan Semesta Alam, Sang Maha Pengasih dan Maha Penyayang. Sebagian
Kontroler Fuzzy-PI untuk Plant Coupled-Tank Mochamad Nur Qomarudin 1 Surabaya, 4 Mei 2013 Abstrak Saya awali dokumen ini dengan Nama Alloh, Tuhan Semesta Alam, Sang Maha Pengasih dan Maha Penyayang. Sebagian
DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY
 DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY Reza Dwi Imami 1), Aris Triwiyatno 2), dan Sumardi 2) Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro, Jln. Prof. Sudharto,
DESAIN KONTROL INVERTED PENDULUM DENGAN METODE KONTROL ROBUST FUZZY Reza Dwi Imami 1), Aris Triwiyatno 2), dan Sumardi 2) Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro, Jln. Prof. Sudharto,
EKO TRI WASISTO Dosen Pembimbing 1 Dosen Pembimbing 2
 RANCANG BANGUN SISTEM KONTROL ATTITUDE PADA UAV (UNMANNED AERIAL VEHICLE) QUADROTOR DF- UAV01 DENGAN MENGGUNAKAN SENSOR ACCELEROMETER 3-AXIS DENGAN METODE FUZZY LOGIC EKO TRI WASISTO 2407.100.065 Dosen
RANCANG BANGUN SISTEM KONTROL ATTITUDE PADA UAV (UNMANNED AERIAL VEHICLE) QUADROTOR DF- UAV01 DENGAN MENGGUNAKAN SENSOR ACCELEROMETER 3-AXIS DENGAN METODE FUZZY LOGIC EKO TRI WASISTO 2407.100.065 Dosen
SISTEM KENDALI HYBRID PID - LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR DC
 SISTEM KENDALI HYBRID PID - LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR DC Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
SISTEM KENDALI HYBRID PID - LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR DC Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
BAB III PERANCANGAN DAN PEMBUATAN SISTEM. Gambar 3. 1 Diagram Blok Sistem Kecepatan Motor DC
 BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
BAB III PERANCANGAN DAN PEMBUATAN SISTEM Bab ini menjelaskan tentang perancangan dan pembuatan sistem kontrol, baik secara software dan hardware yang akan digunakan untuk mendukung keseluruhan sistem yang
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI
 BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
BAB IV PENGUJIAN DAN ANALISA HASIL SIMULASI Pada bab ini akan dijelaskan hasil analisa perancangan kontrol level deaerator yang telah dimodelkan dalam LabVIEW sebagaimana telah dibahas pada bab III. Dengan
MAKALAH. Sistem Kendali. Implementasi Sistim Navigasi Wall Following. Mengguakan Kontrol PID. Dengan Metode Tuning Pada Robot Beroda
 MAKALAH Sistem Kendali Implementasi Sistim Navigasi Wall Following Mengguakan Kontrol PID Dengan Metode Tuning Pada Robot Beroda oleh : ALFON PRIMA 1101024005 PROGRAM STUDI TEKNIK LISTRIK JURUSAN TEKNIK
MAKALAH Sistem Kendali Implementasi Sistim Navigasi Wall Following Mengguakan Kontrol PID Dengan Metode Tuning Pada Robot Beroda oleh : ALFON PRIMA 1101024005 PROGRAM STUDI TEKNIK LISTRIK JURUSAN TEKNIK
IMPLEMENTASI MICROKONTROLLER UNTUK SISTEM KENDALI KECEPATAN BRUSHLESS DC MOTOR MENGGUNAKAN ALGORITMA HYBRID PID FUZZY
 Implementasi Microkontroller untuk Sistem Kendali Kecepatan (Kristiyono dkk.) IMPLEMENTASI MICROKONTROLLER UNTUK SISTEM KENDALI KECEPATAN BRUSHLESS DC MOTOR MENGGUNAKAN ALGORITMA HYBRID PID FUZZY Roedy
Implementasi Microkontroller untuk Sistem Kendali Kecepatan (Kristiyono dkk.) IMPLEMENTASI MICROKONTROLLER UNTUK SISTEM KENDALI KECEPATAN BRUSHLESS DC MOTOR MENGGUNAKAN ALGORITMA HYBRID PID FUZZY Roedy
Perancangan Sistem Kontrol Trajectory pada Kondisi Gangguan Arus Laut Non Uniform di Ketapang-Gilimanuk
 JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2301-9271 A-201 Perancangan Sistem Kontrol Trajectory pada Kondisi Gangguan Arus Laut Non Uniform di - Anindita Adikaputri Vinaya, Aulia Siti Aisjah,A.A
JURNAL TEKNIK POMITS Vol. 2, No. 2, (2013) ISSN: 2301-9271 A-201 Perancangan Sistem Kontrol Trajectory pada Kondisi Gangguan Arus Laut Non Uniform di - Anindita Adikaputri Vinaya, Aulia Siti Aisjah,A.A
IMPEMENTASI KONTROL PID DAN FUZZY LOGIC UNTUK SISTEM KONTROL KECEPATAN MOTOR DC SEBAGAI APLIKASI PRAKTIKUM KONTROL DIGITAL
 ISSN : 2355-9365 e-proceeding of Engineering : Vol.3, No.3 December 2016 Page 4135 IMPEMENTASI KONTROL PID DAN FUZZY LOGIC UNTUK SISTEM KONTROL KECEPATAN MOTOR DC SEBAGAI APLIKASI PRAKTIKUM KONTROL DIGITAL
ISSN : 2355-9365 e-proceeding of Engineering : Vol.3, No.3 December 2016 Page 4135 IMPEMENTASI KONTROL PID DAN FUZZY LOGIC UNTUK SISTEM KONTROL KECEPATAN MOTOR DC SEBAGAI APLIKASI PRAKTIKUM KONTROL DIGITAL
BAB VI PENGUJIAN SISTEM. Beberapa skenario pengujian akan dilakukan untuk memperlihatkan
 BAB VI PENGUJIAN SISTEM 6.1 Tahap Persiapan Pengujian Beberapa skenario pengujian akan dilakukan untuk memperlihatkan performansi sistem kontrol yang dirancang. Namun perlu dipersiapkan terlebih dahulu
BAB VI PENGUJIAN SISTEM 6.1 Tahap Persiapan Pengujian Beberapa skenario pengujian akan dilakukan untuk memperlihatkan performansi sistem kontrol yang dirancang. Namun perlu dipersiapkan terlebih dahulu
Hamzah Ahlul Fikri Jurusan Tehnik Elektro, FT, Unesa,
 Pengendalian Kecepatan Motor Induksi Tiga Fasa Menggunakan Kontrol Fuzzy Logic Hamzah Ahlul Fikri Jurusan Tehnik Elektro, FT, Unesa, email: fikrihamzahahlul@gmail.com Subuh Isnur Haryudo Jurusan Tehnik
Pengendalian Kecepatan Motor Induksi Tiga Fasa Menggunakan Kontrol Fuzzy Logic Hamzah Ahlul Fikri Jurusan Tehnik Elektro, FT, Unesa, email: fikrihamzahahlul@gmail.com Subuh Isnur Haryudo Jurusan Tehnik
PERANCANGAN KONTROLER FUZZY MODEL REFERENCE LEARNING CONTROL (FMRLC) BERBASIS MIKROKONTROLER ATMEGA16 SEBAGAI KENDALI MOTOR BRUSHLESS DC (BLDC)
 BERBASIS MIKROKONTROLER ATMEGA16 SEBAGAI KENDALI MOTOR BRUSHLESS DC (BLDC)") PERANCANGAN KONTROLER FUZZY MODEL REFERENCE LEARNING CONTROL (FMRLC) BERBASIS MIKROKONTROLER ATMEGA16 SEBAGAI KENDALI MOTOR BRUSHLESS DC (BLDC) Muhammad Rifki Fajrianto *), Wahyudi, and Sudjadi Departemen
PERANCANGAN KONTROLER FUZZY MODEL REFERENCE LEARNING CONTROL (FMRLC) BERBASIS MIKROKONTROLER ATMEGA16 SEBAGAI KENDALI MOTOR BRUSHLESS DC (BLDC) Muhammad Rifki Fajrianto *), Wahyudi, and Sudjadi Departemen
satu proses pemurnian tersebut adalah dengan cara sulfitasi. Dalam proses ini, penetralan air kapur yang berlebihan pada pemurnian nira dilakukan deng
 SIMULASI SISTEM PENGONTROL PH NIRA PADA PROSES PEMBUATAN GULA MENGGUNAKAN METODE ANFIS Novan Wahyudi 50403516 Fakultas Teknologi Industri Jurusan Teknik Informatika Abstrak Proses pemurnian nira rupakan
SIMULASI SISTEM PENGONTROL PH NIRA PADA PROSES PEMBUATAN GULA MENGGUNAKAN METODE ANFIS Novan Wahyudi 50403516 Fakultas Teknologi Industri Jurusan Teknik Informatika Abstrak Proses pemurnian nira rupakan
Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe 1 Untuk Sistem Pendulum Kereta
 Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe Untuk Sistem Pendulum Kereta Helvin Indrawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
Kontrol Fuzzy Takagi-Sugeno Berbasis Sistem Servo Tipe Untuk Sistem Pendulum Kereta Helvin Indrawati, Trihastuti Agustinah Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember
IV. PERANCANGAN SISTEM
 SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
SISTEM PENGATURAN KECEPATAN PUTARAN MOTOR PADA MESIN PEMUTAR GERABAH MENGGUNAKAN KONTROLER PROPORSIONAL INTEGRAL DEFERENSIAL (PID) BERBASIS MIKROKONTROLER Oleh: Pribadhi Hidayat Sastro. NIM 8163373 Jurusan
Jurusan Teknik Fisika Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kampus ITS, Keputih Sukolilo, Surabaya 60111
 PERANCANGAN KENDALI CERDAS BERBASIS LOGIKA FUZZY UNTUK PENINGKATAN PERFORMANSI MANUVERING KAPAL (Maratul Hamidah, Dr.Ir. Aulia Siti Aisjah, MT, Dr. Ir. A.A. Masroeri M.Eng ) Jurusan Teknik Fisika Fakultas
PERANCANGAN KENDALI CERDAS BERBASIS LOGIKA FUZZY UNTUK PENINGKATAN PERFORMANSI MANUVERING KAPAL (Maratul Hamidah, Dr.Ir. Aulia Siti Aisjah, MT, Dr. Ir. A.A. Masroeri M.Eng ) Jurusan Teknik Fisika Fakultas
IMPLEMENTASI LOGIKA FUZZY UNTUK MENGENDALIKAN PH DAN LEVEL AIR KOLAM RENANG
 IMPLEMENTASI LOGIKA FUZZY UNTUK MENGENDALIKAN PH DAN LEVEL AIR KOLAM RENANG Nazrul Effendy, M. Heikal Hasan dan Febry Wikatmono Jurusan Teknik Fisika, Fakultas Teknik, Universitas Gadjah Mada Jln. Grafika
IMPLEMENTASI LOGIKA FUZZY UNTUK MENGENDALIKAN PH DAN LEVEL AIR KOLAM RENANG Nazrul Effendy, M. Heikal Hasan dan Febry Wikatmono Jurusan Teknik Fisika, Fakultas Teknik, Universitas Gadjah Mada Jln. Grafika
Pengaturan Kecepatan Motor 3 Fasa pada Mesin Sentrifugal Menggunakan Metode PID Fuzzy
 B-14 Pengaturan Kecepatan Motor 3 Fasa pada Mesin Sentrifugal Menggunakan Metode PID Fuzzy Trio Yus Peristiaferi, Rusdhianto Effendie AK, dan Josaphat Pramudijanto Teknik Elektro, Fakultas Teknologi Industri,
B-14 Pengaturan Kecepatan Motor 3 Fasa pada Mesin Sentrifugal Menggunakan Metode PID Fuzzy Trio Yus Peristiaferi, Rusdhianto Effendie AK, dan Josaphat Pramudijanto Teknik Elektro, Fakultas Teknologi Industri,
PEMODELAN SISTEM KONTROLER LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR INDUKSI MENGGUNAKAN PERANGKAT LUNAK MATLAB / SIMULINK
 1 JURNAL MATRIX VOL. 7, NO. 1, MARET 2017 PEMODELAN SISTEM KONTROLER LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR INDUKSI MENGGUNAKAN PERANGKAT LUNAK MATLAB / SIMULINK I Wayan Raka Ardana 1, I Putu Sutawinaya
1 JURNAL MATRIX VOL. 7, NO. 1, MARET 2017 PEMODELAN SISTEM KONTROLER LOGIKA FUZZY PADA PENGATURAN KECEPATAN MOTOR INDUKSI MENGGUNAKAN PERANGKAT LUNAK MATLAB / SIMULINK I Wayan Raka Ardana 1, I Putu Sutawinaya
MAKALAH SEMINAR TUGAS AKHIR PENGENDALIAN TINGGI MUKA CAIRAN PADA PLANT NONLINEAR MENGGUNAKAN METODE KONTROL FUZZY
 MAKALAH SEMINAR TUGAS AKHIR PENGENDALIAN TINGGI MUKA CAIRAN PADA PLANT NONLINEAR MENGGUNAKAN METODE KONTROL FUZZY Doni Salami 1, Iwan Setiawan 2, Wahyudi 2 Jurusan Teknik Elektro, Fakultas Teknik, Universitas
MAKALAH SEMINAR TUGAS AKHIR PENGENDALIAN TINGGI MUKA CAIRAN PADA PLANT NONLINEAR MENGGUNAKAN METODE KONTROL FUZZY Doni Salami 1, Iwan Setiawan 2, Wahyudi 2 Jurusan Teknik Elektro, Fakultas Teknik, Universitas
BAB IV PENGUJIAN DAN ANALISA
 BAB IV PENGUJIAN DAN ANALISA Pengujian dan analisa sistem merupakan tahap akhir dari realisasi pengendali PID pada pendulum terbalik menggunakan mikrokontroller ATmega8 agar dapat dilinearkan disekitar
BAB IV PENGUJIAN DAN ANALISA Pengujian dan analisa sistem merupakan tahap akhir dari realisasi pengendali PID pada pendulum terbalik menggunakan mikrokontroller ATmega8 agar dapat dilinearkan disekitar
Aplikasi Kendali Fuzzy Logic untuk Pengaturan Kecepatan Motor Universal
 Aplikasi Kendali Fuzzy Logic untuk Pengaturan Kecepatan Motor Universal [ Thiang et al. ] Aplikasi Kendali Fuzzy Logic untuk Pengaturan Kecepatan Motor Universal Thiang, Resmana, Wahyudi Fakultas Teknologi
Aplikasi Kendali Fuzzy Logic untuk Pengaturan Kecepatan Motor Universal [ Thiang et al. ] Aplikasi Kendali Fuzzy Logic untuk Pengaturan Kecepatan Motor Universal Thiang, Resmana, Wahyudi Fakultas Teknologi
BAB III ANALISIS DAN PERANCANGAN SISTEM
 BAB III ANALISIS DAN PERANCANGAN SISTEM 3. 1. Spesifikasi Sistem Pada tugas akhir ini, penulis membuat sebuah prototype dari kendaraan skuter seimbang. Skuter seimbang tersebut memiliki spesifikasi sebagai
BAB III ANALISIS DAN PERANCANGAN SISTEM 3. 1. Spesifikasi Sistem Pada tugas akhir ini, penulis membuat sebuah prototype dari kendaraan skuter seimbang. Skuter seimbang tersebut memiliki spesifikasi sebagai
Makalah Seminar Tugas Akhir
 Makalah Seminar Tugas Akhir APLIKASI KENDALI MENGGUNAKAN SKEMA GAIN SCHEDULING UNTUK PENGENDALIAN SUHU CAIRAN PADA PLANT ELECTRIC WATER HEATER Ahmad Shafi Mukhaitir [1], Iwan Setiawan, S.T., M.T. [2],
Makalah Seminar Tugas Akhir APLIKASI KENDALI MENGGUNAKAN SKEMA GAIN SCHEDULING UNTUK PENGENDALIAN SUHU CAIRAN PADA PLANT ELECTRIC WATER HEATER Ahmad Shafi Mukhaitir [1], Iwan Setiawan, S.T., M.T. [2],
Pemodelan dan Disain Kontroler Kaskade Pada Sistem Pressure Process Trainer Feedback Risfendra, Sukardi. Abstract
 Pemodelan dan Disain Kontroler Kaskade Pada Sistem Pressure Process Trainer Feedback 38-74 Risfendra, Sukardi Abstract This articel aim to design cascade controller in pressure control trainer, Feedback
Pemodelan dan Disain Kontroler Kaskade Pada Sistem Pressure Process Trainer Feedback 38-74 Risfendra, Sukardi Abstract This articel aim to design cascade controller in pressure control trainer, Feedback
BAB IV SISTEM KENDALI DENGAN FUZZY LOGIC
 BAB IV SISTEM KENDALI DENGAN FUZZY LOGIC Salah satu penerapan logika fuzzy adalah sebagai pengendali pada sistem pengendali umpan balik negatif (Negative Feedback Control System). Secara blok diagram,
BAB IV SISTEM KENDALI DENGAN FUZZY LOGIC Salah satu penerapan logika fuzzy adalah sebagai pengendali pada sistem pengendali umpan balik negatif (Negative Feedback Control System). Secara blok diagram,
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO
 KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO Jalan MT Haryono 167 Telp & Fax. 0341 554166 Malang 65145 KODE PJ-01 PENGESAHAN PUBLIKASI HASIL PENELITIAN
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO Jalan MT Haryono 167 Telp & Fax. 0341 554166 Malang 65145 KODE PJ-01 PENGESAHAN PUBLIKASI HASIL PENELITIAN
Implementasi Fuzzy Logic Untuk Mengatur Banyak Air Pada Tanaman Mawar Berdasarkan Suhu Dan Kelembaban
 Implementasi Fuzzy Logic Untuk Mengatur Banyak Air Pada Tanaman Mawar Berdasarkan Suhu Dan Kelembaban Lingga Dwi Putra 1, Joke Pratilastiarso 2, Endro Wahjono 3 1. Mahasiswa Jurusan Teknik Elektro Industri
Implementasi Fuzzy Logic Untuk Mengatur Banyak Air Pada Tanaman Mawar Berdasarkan Suhu Dan Kelembaban Lingga Dwi Putra 1, Joke Pratilastiarso 2, Endro Wahjono 3 1. Mahasiswa Jurusan Teknik Elektro Industri
Ir.Muchammad Ilyas Hs DONY PRASETYA ( ) DOSEN PEMBIMBING :
 DOSEN PEMBIMBING :") Perancangan Sistem Pengendalian Rasio Aliran Udara dan Bahan Bakar Pada Boiler Di Unit Utilitas PT. Trans Pacific Petrochemical Indotama (TPPI) Tuban Dengan Menggunakan Sistem Pengendali PID -Fuzzy OLEH
Perancangan Sistem Pengendalian Rasio Aliran Udara dan Bahan Bakar Pada Boiler Di Unit Utilitas PT. Trans Pacific Petrochemical Indotama (TPPI) Tuban Dengan Menggunakan Sistem Pengendali PID -Fuzzy OLEH
APLIKASI FIS MODEL SUGENO PADA PENGENDALIAN VALVE UNTUK MANGATUR TINGGI LEVEL AIR. Wahyudi, Iwan Setiawan, dan Martina Nainggolan *)
") APLIKASI FIS MODEL SUGENO PADA PENGENDALIAN VALVE UNTUK MANGATUR TINGGI LEVEL AIR Wahyudi, Iwan Setiawan, dan Martina Nainggolan *) Abstract Fuzzy control is one of the controller alternative using expert
APLIKASI FIS MODEL SUGENO PADA PENGENDALIAN VALVE UNTUK MANGATUR TINGGI LEVEL AIR Wahyudi, Iwan Setiawan, dan Martina Nainggolan *) Abstract Fuzzy control is one of the controller alternative using expert
Perancangan Sistem Kontrol Sandar Kapal Otomatis Berbasis Logika Fuzzy di Pelabuhan Tanjung Perak Surabaya
 JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) 1-6 1 Perancangan Sistem Kontrol Sandar Kapal Otomatis Berbasis Logika Fuzzy di Pelabuhan Tanjung Perak Surabaya Randika Gunawan, Aulia Siti Aisjah, A.A. Masroeri
JURNAL TEKNIK POMITS Vol. 1, No. 1, (2013) 1-6 1 Perancangan Sistem Kontrol Sandar Kapal Otomatis Berbasis Logika Fuzzy di Pelabuhan Tanjung Perak Surabaya Randika Gunawan, Aulia Siti Aisjah, A.A. Masroeri
SKRIPSI. Disusun Oleh: NUR ANITA AGUSTIYANA
 PENGGUNAAN N BANK KAPASITOR UNTUK MEMPERBAIKI FAKTOR DAYA DAN MENGURANGI RUGI-RUGI DAYA MENGGUNAKAN FUZZY LOGIC PADA SALURAN LISTRIK UNIVERSITAS MUHAMMADIYAH MALANG (KAMPUS 3 GKB - 1) SKRIPSI Disusun Oleh:
PENGGUNAAN N BANK KAPASITOR UNTUK MEMPERBAIKI FAKTOR DAYA DAN MENGURANGI RUGI-RUGI DAYA MENGGUNAKAN FUZZY LOGIC PADA SALURAN LISTRIK UNIVERSITAS MUHAMMADIYAH MALANG (KAMPUS 3 GKB - 1) SKRIPSI Disusun Oleh:
Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy
 ABSTRAK Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
ABSTRAK Pengaturan Kecepatan Motor DC Menggunakan Kendali Hybrid PID-Fuzzy Felix Pasila, Thiang, Oscar Finaldi Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto 121-131 Surabaya - Indonesia
RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC
 RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC Dwiana Hendrawati Prodi Teknik Konversi Energi Jurusan Teknik Mesin Politeknik Negeri Semarang Jl. Prof. H. Sudarto, SH.,
RESPON SISTEM DITINJAU DARI PARAMETER KONTROLER PID PADA KONTROL POSISI MOTOR DC Dwiana Hendrawati Prodi Teknik Konversi Energi Jurusan Teknik Mesin Politeknik Negeri Semarang Jl. Prof. H. Sudarto, SH.,
Implementasi Kendali Logika Fuzzy pada Pengendalian Kecepatan Motor DC Berbasis Programmable Logic Controller
 Implementasi Kendali Logika Fuzzy pada Pengendalian Kecepatan Motor DC Berbasis Programmable Logic Controller Thiang, Resmana, Fengky Setiono Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto
Implementasi Kendali Logika Fuzzy pada Pengendalian Kecepatan Motor DC Berbasis Programmable Logic Controller Thiang, Resmana, Fengky Setiono Jurusan Teknik Elektro Universitas Kristen Petra Jl. Siwalankerto
Perancangan Sistem Pengendalian Suhu Kumbung Jamur dengan Logika Fuzzy
 Perancangan Sistem Pengendalian Suhu Kumbung Jamur dengan Logika Fuzzy Dosen pembimbing : Hendra Cordova, ST, MT Mahendra Ega Higuitta- 24 08 100 054 Ekologi Jamur Tiram Pertumbuhan jamur tiram sangat
Perancangan Sistem Pengendalian Suhu Kumbung Jamur dengan Logika Fuzzy Dosen pembimbing : Hendra Cordova, ST, MT Mahendra Ega Higuitta- 24 08 100 054 Ekologi Jamur Tiram Pertumbuhan jamur tiram sangat
Kontrol Tracking Fuzzy Menggunakan Model Following untuk Sistem Pendulum Kereta
 JURNAL TENI ITS Vol. 5, No., (6) ISSN: 7-59 (-97 Print) A ontrol Traking Fuzzy Menggunakan Model Following untuk Sistem Pendulum ereta Jimmy Hennyta Satya Putra, Trihastuti Agustinah Teknik Elektro, Fakultas
JURNAL TENI ITS Vol. 5, No., (6) ISSN: 7-59 (-97 Print) A ontrol Traking Fuzzy Menggunakan Model Following untuk Sistem Pendulum ereta Jimmy Hennyta Satya Putra, Trihastuti Agustinah Teknik Elektro, Fakultas
SISTEM PENGENDALIAN LEVEL DAN TEKANAN PADA UNIT KOMPRESI GAS SYNTHESA DENGAN METODE LOGIKA FUZZY DI PT. PETROKIMIA GRESIK
 SISTEM PENGENDALIAN LEVEL DAN TEKANAN PADA UNIT KOMPRESI GAS SYNTHESA DENGAN METODE LOGIKA FUZZY DI PT. PETROKIMIA GRESIK Onny Purnamayudhia Universitas Wijaya Putra ABSTRACT Chemical processes in the
SISTEM PENGENDALIAN LEVEL DAN TEKANAN PADA UNIT KOMPRESI GAS SYNTHESA DENGAN METODE LOGIKA FUZZY DI PT. PETROKIMIA GRESIK Onny Purnamayudhia Universitas Wijaya Putra ABSTRACT Chemical processes in the
Simulasi Control System Design dengan Scilab dan Scicos
 Simulasi Control System Design dengan Scilab dan Scicos 1. TUJUAN PERCOBAAN Praktikan dapat menguasai pemodelan sistem, analisa sistem dan desain kontrol sistem dengan software simulasi Scilab dan Scicos.
Simulasi Control System Design dengan Scilab dan Scicos 1. TUJUAN PERCOBAAN Praktikan dapat menguasai pemodelan sistem, analisa sistem dan desain kontrol sistem dengan software simulasi Scilab dan Scicos.
Kata kunci : Governor, load frequency control, fuzzy logic controller
 ABSTRAK Sistem tenaga listrik yang baik merupakan suatu sistem yang dapat melayani permintaan beban secara berkelanjutan serta tegangan dan frekuensinya stabil. Kondisi sistem yang stabil sebenarnya tidak
ABSTRAK Sistem tenaga listrik yang baik merupakan suatu sistem yang dapat melayani permintaan beban secara berkelanjutan serta tegangan dan frekuensinya stabil. Kondisi sistem yang stabil sebenarnya tidak
Lima metode defuzzifikasi ini dibandingkan dengan mengimplementasikan pada pengaturan kecepatan motor DC.
 Sutikno, Indra Waspada PERBANDINGAN METODE DEFUZZIFIKASI SISTEM KENDALI LOGIKA FUZZY MODEL MAMDANI PADA MOTOR DC Sutikno, Indra Waspada Program Studi Teknik Informatika Universitas Diponegoro tik@undip.ac.id,
Sutikno, Indra Waspada PERBANDINGAN METODE DEFUZZIFIKASI SISTEM KENDALI LOGIKA FUZZY MODEL MAMDANI PADA MOTOR DC Sutikno, Indra Waspada Program Studi Teknik Informatika Universitas Diponegoro tik@undip.ac.id,
Jurusan Teknik Elektro Fakultas Teknik Universitas Brawijaya Jalan MT. Haryono 167, Malang 65145, Indonesia
 APLIKASI PENGENDALI SUHU RUANGAN DENGAN KONTROLER LOGIKA FUZZY BERBASIS MIKROKONTROLER AVR-ATMEGA 328 Diyan Agung W. 1, Ir. Purwanto MT. 2, Ir.Bambang Siswojo MT. 2 1 Mahasiswa Teknik Elektro Univ. Brawijaya,
APLIKASI PENGENDALI SUHU RUANGAN DENGAN KONTROLER LOGIKA FUZZY BERBASIS MIKROKONTROLER AVR-ATMEGA 328 Diyan Agung W. 1, Ir. Purwanto MT. 2, Ir.Bambang Siswojo MT. 2 1 Mahasiswa Teknik Elektro Univ. Brawijaya,
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID ADAPTIF PADA PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA
 PERANCANGAN DAN IMPLEMENTASI KONTROLER PID ADAPTIF PADA PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA Halim Mudia 2209106079 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya-60111,
PERANCANGAN DAN IMPLEMENTASI KONTROLER PID ADAPTIF PADA PENGATURAN KECEPATAN MOTOR INDUKSI TIGA FASA Halim Mudia 2209106079 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya-60111,
Institut Teknologi Sepuluh Nopember Surabaya MATERI PENGENDALI
 Institut Teknologi Sepuluh Nopember Surabaya MATERI PENGENDALI Contoh Soal Ringkasan Latihan Assessment Kontroler merupakan salah satu komponen dalam sistem pengendalian yang memegang peranan sangat penting.
Institut Teknologi Sepuluh Nopember Surabaya MATERI PENGENDALI Contoh Soal Ringkasan Latihan Assessment Kontroler merupakan salah satu komponen dalam sistem pengendalian yang memegang peranan sangat penting.
Perancangan dan Simulasi MRAC PID Control untuk Proses Pengendalian Temperatur pada Continuous Stirred Tank Reactor (CSTR)
") JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: 2337-3539 (2301-9271 Print) A-128 Perancangan dan Simulasi MRAC PID Control untuk Proses Pengendalian Temperatur pada Continuous Stirred Tank Reactor (CSTR)
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: 2337-3539 (2301-9271 Print) A-128 Perancangan dan Simulasi MRAC PID Control untuk Proses Pengendalian Temperatur pada Continuous Stirred Tank Reactor (CSTR)
Rancang Bangun Sistem Pengendalian Level pada Knock Out Gas Drum Menggunakan Pengendali PID di Plant LNG
 Rancang Bangun Sistem Pengendalian Level pada Knock Out Gas Drum Menggunakan Pengendali PID di Plant LNG Paisal Tajun Aripin 1, Erna Kusuma Wati 1, V. Vekky R. Repi 1, Hari Hadi Santoso 1,2 1 Program Studi
Rancang Bangun Sistem Pengendalian Level pada Knock Out Gas Drum Menggunakan Pengendali PID di Plant LNG Paisal Tajun Aripin 1, Erna Kusuma Wati 1, V. Vekky R. Repi 1, Hari Hadi Santoso 1,2 1 Program Studi
PENGGUNAAN FUZZY INFERENCE SYSTEM MODEL SUGENO PADA PENGENDALIAN SUHU RUANGAN
 P P P P PENGGUNAAN FUZZY INFERENCE SYSTEM MODEL SUGENO PADA PENGENDALIAN SUHU RUANGAN Wahyu Herman Susila 1, Wahyudi 2, Iwan Setiawan 2 Abstrak - Teknik kendali dengan menggunakan Fuzzy telah banyak diaplikasikan.
P P P P PENGGUNAAN FUZZY INFERENCE SYSTEM MODEL SUGENO PADA PENGENDALIAN SUHU RUANGAN Wahyu Herman Susila 1, Wahyudi 2, Iwan Setiawan 2 Abstrak - Teknik kendali dengan menggunakan Fuzzy telah banyak diaplikasikan.
Sistem Pengendalian Manuver Payload (Muatan-Roket) Menggunakan Kontroler Fuzzy
 Menggunakan Kontroler Fuzzy") Sistem Pengendalian Manuver Payload (Muatan-Roket) Menggunakan Kontroler Fuzzy Arifudin Anwar, Rusdhianto Effendi A.K Jurusan Teknik Elektro, FTI-ITS Abstrak-Sistem pengendalian muatan roket merupakan
Sistem Pengendalian Manuver Payload (Muatan-Roket) Menggunakan Kontroler Fuzzy Arifudin Anwar, Rusdhianto Effendi A.K Jurusan Teknik Elektro, FTI-ITS Abstrak-Sistem pengendalian muatan roket merupakan
pengendali Konvensional Time invariant P Proportional Kp
 Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
Strategi Dalam Teknik Pengendalian Otomatis Dalam merancang sistem pengendalian ada berbagai macam strategi. Strategi tersebut dikatakan sebagai strategi konvensional, strategi modern dan strategi berbasis
PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN
 PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN Nazrul Effendy 1), Masrul Solichin 2), Teuku Lukman Nur Hakim 3), Faisal Budiman 4) Jurusan Teknik Fisika, Fakultas
PENGENDALIAN PROSES EVAPORASI PADA PABRIK UREA MENGGUNAKAN KENDALI JARINGAN SARAF TIRUAN Nazrul Effendy 1), Masrul Solichin 2), Teuku Lukman Nur Hakim 3), Faisal Budiman 4) Jurusan Teknik Fisika, Fakultas
FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC
 FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC Afriadi Rahman #1, Agus Indra G, ST, M.Sc, #2, Dr. Rusminto Tjatur W, ST, #3, Legowo S, S.ST, M.Sc #4 # Jurusan Teknik
FUZZY LOGIC UNTUK KONTROL MODUL PROSES KONTROL DAN TRANSDUSER TIPE DL2314 BERBASIS PLC Afriadi Rahman #1, Agus Indra G, ST, M.Sc, #2, Dr. Rusminto Tjatur W, ST, #3, Legowo S, S.ST, M.Sc #4 # Jurusan Teknik
PREDIKSI KECEPATAN ROTASI KOMPRESOR MESIN PESAWAT BOEING MENGGUNAKAN LOGIKA FUZZY
 Seminar Tugas Akhir PREDIKSI KECEPATAN ROTASI KOMPRESOR MESIN PESAWAT BOEING 737-300 MENGGUNAKAN LOGIKA FUZZY O L E H : N U R R O H MAN A N D I K A R D I A N P E M BIMBING : D R. I R. A U L I A S I T I
Seminar Tugas Akhir PREDIKSI KECEPATAN ROTASI KOMPRESOR MESIN PESAWAT BOEING 737-300 MENGGUNAKAN LOGIKA FUZZY O L E H : N U R R O H MAN A N D I K A R D I A N P E M BIMBING : D R. I R. A U L I A S I T I
MINIATUR PENGENDALI TEKANAN LIQUID
 MINIATUR PENGENDALI TEKANAN LIQUID MENGGUNAKAN KONTROLER PID BERBASIS PLC DENGAN PNEUMATIK Wiyogo darmawan 1, Ir. Purwanto, M.Sc 2, Ir. Bambang Siswoyo, MT. 3 1 Mahasiswa Teknik Elektro, 2.3 Dosen Teknik
MINIATUR PENGENDALI TEKANAN LIQUID MENGGUNAKAN KONTROLER PID BERBASIS PLC DENGAN PNEUMATIK Wiyogo darmawan 1, Ir. Purwanto, M.Sc 2, Ir. Bambang Siswoyo, MT. 3 1 Mahasiswa Teknik Elektro, 2.3 Dosen Teknik
Rancang Bangun Sistem Pendingin Mesin Mobil Menggunakan Pengendali Logika Fuzzy
 Rancang Bangun Sistem Pendingin Mesin Mobil Menggunakan Pengendali Logika Fuzzy Purwanto Priyojatmiko 1, Akhmad Musafa 2 1,2 Program Studi Teknik Elektro Fakultas Teknik, Universitas Budi Luhur Jl.Raya
Rancang Bangun Sistem Pendingin Mesin Mobil Menggunakan Pengendali Logika Fuzzy Purwanto Priyojatmiko 1, Akhmad Musafa 2 1,2 Program Studi Teknik Elektro Fakultas Teknik, Universitas Budi Luhur Jl.Raya
LEVEL DAN SISTEM PROTEKSI PADA PERTAMINA (PERSERO) RU IV CILACAP
 RU IV CILACAP") PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN SISTEM PROTEKSI PADA KNOCK OUT DRUM 260V106 DI PT PERTAMINA (PERSERO) RU IV CILACAP Oleh : Fitri Noer Laili (2406100034) Pembimbing : Hendra Cordova, ST, MT PENDAHULUAN
PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN SISTEM PROTEKSI PADA KNOCK OUT DRUM 260V106 DI PT PERTAMINA (PERSERO) RU IV CILACAP Oleh : Fitri Noer Laili (2406100034) Pembimbing : Hendra Cordova, ST, MT PENDAHULUAN
PENGENDALIAN TEKANAN PADA PRESSURE PROCESS RIG MELAUI MODBUS MENGGUNAKAN KONTROLER FUZZY PID
 ENGENDALIAN TEKANAN ADA RESSURE ROCESS RIG 38-714 MELAUI MODBUS MENGGUNAKAN KONTROLER FUZZY ID Tedy Ade Wijaya 08 100 639 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya
ENGENDALIAN TEKANAN ADA RESSURE ROCESS RIG 38-714 MELAUI MODBUS MENGGUNAKAN KONTROLER FUZZY ID Tedy Ade Wijaya 08 100 639 Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya
JOBSHEET SISTEM CERDAS REASONING 2. Fuzzifikasi
 JOBSHEET SISTEM CERDAS REASONING 2 Fuzzifikasi S1 PENDIDIKAN TEKNIK ELEKTRO JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI MALANG 2016 PRAKTIKUM SISTEM CERDAS - REASONING JOBSHEET 2 - FUZZIFIKASI
JOBSHEET SISTEM CERDAS REASONING 2 Fuzzifikasi S1 PENDIDIKAN TEKNIK ELEKTRO JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI MALANG 2016 PRAKTIKUM SISTEM CERDAS - REASONING JOBSHEET 2 - FUZZIFIKASI
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT)
") DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
DESAIN KONTROL PID UNTUK MENGATUR KECEPATAN MOTOR DC PADA ELECTRICAL CONTINUOUSLY VARIABLE TRANSMISSION (ECVT) Oleh : Raga Sapdhie Wiyanto Nrp 2108 100 526 Dosen Pembimbing : Dr. Ir. Bambang Sampurno,
Desain dan Implementasi Model Reference Adaptive Control untuk Pengaturan Tracking Optimal Posisi Motor DC
 Desain dan Implementasi Model Reference Adaptive Control untuk Pengaturan Tracking Optimal Posisi Motor DC Dinar Setyaningrum 22081000018 Teknik Sistem Pengaturan Institut Teknologi Sepuluh Nopember Rabu,
Desain dan Implementasi Model Reference Adaptive Control untuk Pengaturan Tracking Optimal Posisi Motor DC Dinar Setyaningrum 22081000018 Teknik Sistem Pengaturan Institut Teknologi Sepuluh Nopember Rabu,
BAB III PERANCANGAN SIMULASI. 3.1 Perancangan Sistem Parkir Mobil Seri Otomatis
 BAB III PERANCANGAN SIMULASI Pada bab ini dijelaskan perancangan untuk mengetahui alur kerja dari sistem yang akan dibuat. Pada perancangan ini dibuat 2 kontrol logika fuzzy untuk mobil parkir secara otomatis
BAB III PERANCANGAN SIMULASI Pada bab ini dijelaskan perancangan untuk mengetahui alur kerja dari sistem yang akan dibuat. Pada perancangan ini dibuat 2 kontrol logika fuzzy untuk mobil parkir secara otomatis
Implementasi Metode Fuzzy Logic Controller Pada Kontrol Posisi Lengan Robot 1 DOF
 Implementasi Metode Fuzzy Logic Controller Pada Kontrol Posisi Lengan Robot 1 DOF ndik Yulianto 1), gus Salim 2), Erwin Sukma Bukardi 3) Prodi Teknik Elektro, Fakultas Teknologi Industri, Universitas Internasional
Implementasi Metode Fuzzy Logic Controller Pada Kontrol Posisi Lengan Robot 1 DOF ndik Yulianto 1), gus Salim 2), Erwin Sukma Bukardi 3) Prodi Teknik Elektro, Fakultas Teknologi Industri, Universitas Internasional
(Heni Sulastri, Syamsul Arifin, Aulia Siti Aisjah)
") PERANCANGAN INLET PRESSURE CONTROL (IPC) HIGH PRESSURE STEAM TURBIN BERBASIS LOGIKA FUZZY-PI GAIN SCHEDULING DI PLTGU TAMBAK LOROK PT.INDONESIA POWER UBP SEMARANG (Heni Sulastri, Syamsul Arifin, Aulia
PERANCANGAN INLET PRESSURE CONTROL (IPC) HIGH PRESSURE STEAM TURBIN BERBASIS LOGIKA FUZZY-PI GAIN SCHEDULING DI PLTGU TAMBAK LOROK PT.INDONESIA POWER UBP SEMARANG (Heni Sulastri, Syamsul Arifin, Aulia
BAB I PENDAHULUAN. kendali dengan campur tangan manusia dalam jumlah yang sangat kecil.
 BAB I PENDAHULUAN A. Latar Belakang Perkembangan teknologi pada saat ini mulai bergeser kepada otomatisasi sistem kendali dengan campur tangan manusia dalam jumlah yang sangat kecil. Banyaknya penemuan
BAB I PENDAHULUAN A. Latar Belakang Perkembangan teknologi pada saat ini mulai bergeser kepada otomatisasi sistem kendali dengan campur tangan manusia dalam jumlah yang sangat kecil. Banyaknya penemuan
Sistem Kontrol Pergerakan Pada Robot Line Follower Berbasis Hybrid PID-Fuzzy Logic
 Sistem Kontrol Pergerakan Pada Robot Line Follower Berbasis Hybrid PID-Fuzzy Logic I Putu Adinata Mas Pratama 1, I Nengah Suweden 2, I.B. Alit Swamardika 3 Jurusan Teknik Elektro Fakultas Teknik Universitas
Sistem Kontrol Pergerakan Pada Robot Line Follower Berbasis Hybrid PID-Fuzzy Logic I Putu Adinata Mas Pratama 1, I Nengah Suweden 2, I.B. Alit Swamardika 3 Jurusan Teknik Elektro Fakultas Teknik Universitas
ISTILAH ISTILAH DALAM SISTEM PENGENDALIAN
 ISTILAH ISTILAH DALAM SISTEM PENGENDALIAN PENGANTAR Sistem pengendalian khususnya pengendalian otomatis memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi. Dalam bahasan ini, akan
ISTILAH ISTILAH DALAM SISTEM PENGENDALIAN PENGANTAR Sistem pengendalian khususnya pengendalian otomatis memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi. Dalam bahasan ini, akan
PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN JARINGAN SARAF TIRUAN PREDIKTIF
 PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN JARINGAN SARAF TIRUAN PREDIKTIF Rr.rahmawati Putri Ekasari, Rusdhianto Effendi AK., Eka Iskandar Jurusan Teknik Elektro, Fakultas Teknologi
PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN JARINGAN SARAF TIRUAN PREDIKTIF Rr.rahmawati Putri Ekasari, Rusdhianto Effendi AK., Eka Iskandar Jurusan Teknik Elektro, Fakultas Teknologi
LOGO OLEH : ANIKE PURBAWATI DOSEN PEMBIMBING : KATHERIN INDRIAWATI, ST.MT.
 LOGO Perancangan Sistem Pengendalian Tekanan Keluaran Steam Separator Dalam Upaya Peningkatan Kualitas Output Steam di PT. Pertamina Geothermal Energy area Kamojang, Jawa Barat OLEH : ANIKE PURBAWATI 2408100037
LOGO Perancangan Sistem Pengendalian Tekanan Keluaran Steam Separator Dalam Upaya Peningkatan Kualitas Output Steam di PT. Pertamina Geothermal Energy area Kamojang, Jawa Barat OLEH : ANIKE PURBAWATI 2408100037
PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN ALGORITMA MODEL PREDICTIVE CONTROL (MPC)
") PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN ALGORITMA MODEL PREDICTIVE CONTROL (MPC) Fathimah Ekasari M, Rusdhianto Effendi AK., Eka Iskandar Jurusan Teknik Elektro, Fakultas Teknologi
PENGENDALI TEMPERATUR FLUIDA PADA HEAT EXCHANGER DENGAN MENGGUNAKAN ALGORITMA MODEL PREDICTIVE CONTROL (MPC) Fathimah Ekasari M, Rusdhianto Effendi AK., Eka Iskandar Jurusan Teknik Elektro, Fakultas Teknologi
IMPLEMENTASI ADAPTIVE SWITCHING FUZZY LOGIC CONTROLER SEBAGAI PENGENDALI LEVEL AIR PADA TIGA BEJANA BERINTERAKSI
 IMPLEMENTASI ADAPTIVE SWITCHING FUZZY LOGIC CONTROLER SEBAGAI PENGENDALI LEVEL AIR PADA TIGA BEJANA BERINTERAKSI Satryo Budi Utomo ), Rusdhianto ), Katjuk Astrowulan ) ) Fakultas Teknik,Jurusan Teknik
IMPLEMENTASI ADAPTIVE SWITCHING FUZZY LOGIC CONTROLER SEBAGAI PENGENDALI LEVEL AIR PADA TIGA BEJANA BERINTERAKSI Satryo Budi Utomo ), Rusdhianto ), Katjuk Astrowulan ) ) Fakultas Teknik,Jurusan Teknik
BAB I PENDAHULUAN. manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi
 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi yang semakin pesat dipicu oleh kebutuhan manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi perintah user dalam hal
BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan teknologi yang semakin pesat dipicu oleh kebutuhan manusia akan teknologi tepat guna. Teknologi tepat guna yang mampu memenuhi perintah user dalam hal
Institut Teknologi Sepuluh Nopember PERANCANGAN SISTEM PENGENDALIAN TEKANAN DAN FLOW UNTUK KEBUTUHAN REFUELING SYSTEM PADA DPPU JUANDA SURABAYA
 PERANCANGAN SISTEM PENGENDALIAN TEKANAN DAN FLOW UNTUK KEBUTUHAN REFUELING SYSTEM PADA DPPU JUANDA SURABAYA Oleh : ITS Institut Teknologi Sepuluh Nopember Arya Dwi Prayoga 2408100097 Pembimbing : Fitri
PERANCANGAN SISTEM PENGENDALIAN TEKANAN DAN FLOW UNTUK KEBUTUHAN REFUELING SYSTEM PADA DPPU JUANDA SURABAYA Oleh : ITS Institut Teknologi Sepuluh Nopember Arya Dwi Prayoga 2408100097 Pembimbing : Fitri
Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR
 Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR 2105100166 PENDAHULUAN LATAR BELAKANG Control system : keluaran (output) dari sistem sesuai dengan referensi yang diinginkan Non linear
Dosen Pembimbing : Hendro Nurhadi, Dipl. Ing. Ph.D. Oleh : Bagus AR 2105100166 PENDAHULUAN LATAR BELAKANG Control system : keluaran (output) dari sistem sesuai dengan referensi yang diinginkan Non linear