ESTIMASI PELACAKAN RADAR TIGA DIMENSI MENGGUNAKAN MODIFIKASI EXTENDED KALMAN FILTER
|
|
|
- Budi Sumadi
- 6 tahun lalu
- Tontonan:
Transkripsi

1 TUGAS AKHIR - SM ESTIMASI PELACAKAN RADAR TIGA DIMENSI MENGGUNAKAN MODIFIKASI EXTENDED KALMAN FILTER PRIMA ADITYA NRP Dosen Pembimbing: Prof. Dr. Erna Apriliani, M.Si Dr. Didik Khusnul Arif, M.Si JURUSAN MATEMATIKA Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Teknologi Sepuluh Nopember Surabaya 2017
2
3 FINAL PROJECT - SM ESTIMATION OF THREE-DIMENSIONAL RADAR TRACKING USING MODIFIED EXTENDED KALMAN FILTER PRIMA ADITYA NRP Supervisors: Prof. Dr. Erna Apriliani, M.Si Dr. Didik Khusnul Arif, M.Si DEPARTMENT OF MATHEMATICS Faculty of Mathematics and Natural Sciences Institut Teknologi Sepuluh Nopember Surabaya 2017
4 iv
5 v
6
7 ESTIMASI PELACAKAN RADAR TIGA DIMENSI MENGGUNAKAN MODIFIKASI EXTENDED KALMAN FILTER Nama Mahasiswa : Prima Aditya NRP : Jurusan : Matematika FMIPA-ITS Pembimbing : 1. Prof. Dr. Erna Apriliani, M.Si 2. Dr. Didik Khusnul Arif, M.Si Abstrak Pelacakan radar tiga dimensi sekarang ini banyak dilakukan pengembangan. Desain filter pelacakan yang biasa mengandalkan pada sistem yang linier, sedangkan sistem yang tak linier kebanyakan terjadi dalam kehidupan sehari-hari. Pengembangan dari algoritma filter ini dapat mengatasi pengukuran radar tiga dimensi dalam kasus yang diusulkan dalam hal ini radar mengukur target dengan jarak r, sudut putar θ, dan sudut elevasi φ. Data yang dimiliki adalah data pengukuran yang tidak linier. Dalam mengatasi ketidaklinieran yang melekat pada model sistem dan model pengukuran, dilakukan modifikasi Extended Kalman Filter dengan membuat kovarian dan mean buatan baru yang disesuaikan langsung pada sistem radar tiga dimensi. Hasil dari simulasi menunjukkan bahwa formulasi yang diusulkan sangat efektif dalam perhitungan pengukuran yang tidak linier dengan nilai error sebesar 0.77% hingga 1.15%. Kata-kunci: Pelacakan radar tiga dimensi, Extended Kalman Filter, modifikasi Extended Kalman Filter. vii
8
9 ESTIMATION OF THREE-DIMENSIONAL RADAR TRACKING USING MODIFIED EXTENDED KALMAN FILTER Name : Prima Aditya NRP : Department : Mathematics FMIPA-ITS Supervisors : 1. Prof. Dr. Erna Apriliani, M.Si 2. Dr. Didik Khusnul Arif, M.Si Abstract Three-dimensional radar tracking today many do development. Tracking filter designs commonly rely on a linear system, while the system is not linear mostly occur in everyday life. The development of this filter algorithm can solve the three-dimensional radar measurements in the case proposed in this case the target measured by radar with distance r, azimuth angle θ, and the elevation angle φ. Data which owned is not linear measurement data. To solve the nonlinearities inherent in the system model and the measurement model, modification of Extended Kalman Filter to create new artificial covariance and mean adjusted directly on the three-dimensional radar system. The results of the simulations show that the proposed formulation is very effective in the calculation of measurement is not linear with the value textit error at 0.77 % until 1.15 %. Key-words: Radar Tracking System, Extended Kalman Filter, Modified Extended Kalman Filter. ix
10
11 KATA PENGANTAR Segala puji dan syukur penulis panjatkan ke-hadirat Tuhan Yang Maha Esa yang telah memberikan limpahan rahmatnya, sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul ESTIMASI PELACAKAN RADAR TIGA DIMENSI MENGGUNAKAN MODIFIKASI EXTENDED KALMAN FILTER sebagai salah satu syarat kelulusan Program Sarjana Jurusan Matematika FMIPA Institut Teknologi Sepuluh Nopember (ITS) Surabaya. Tugas Akhir ini dapat terselesaikan dengan baik berkat bantuan dan dukungan dari berbagai pihak. Oleh karena itu, penulis menyampaikan ucapan terima kasih dan penghargaan kepada: 1. Dr. Imam Mukhlash, S.Si, MT selaku Ketua Jurusan Matematika ITS yang telah memberikan dukungan dan bimbingan selama perkuliahan hingga terselesaikannya Tugas Akhir ini. 2. Prof. Dr. Dra. Erna Apriliani, M.Si selaku dosen pembimbing atas segala bimbingan dan motivasinya kepada penulis dalam mengerjakan Tugas Akhir ini sehingga dapat terselesaikan dengan baik. 3. Dr. Didik Khusnul Arif, M.Si yang juga selaku dosen pembimbing atas segala bimbingan dan motivasinya kepada penulis dalam mengerjakan Tugas Akhir ini sehingga dapat terselesaikan dengan baik. xi
12 4. Drs. Lukman Hanafi, M.Sc., Dra. Nur Asiyah, M.Si., dan Tahiyatul Asfihani, S.Si., M.Si selaku dosen penguji atas semua saran yang telah diberikan demi perbaikan Tugas Akhir ini. 5. Dr. Didik Khusnul Arif, S.Si, M.Si selaku Kaprodi S1 Jurusan Matematika ITS 6. Bapak dan Ibu dosen serta para staf Jurusan Matematika ITS yang tidak dapat penulis sebutkan satu-persatu. 7. Ayah, mama, kakak dan keluargaku yang senantiasa mendukung dan mendoakan. 8. Wawan, Gery, Rozi, Ivan, Vicky, Amel, Xenny, Nastitie, Fauzia, Ardi, Frikha yang senantiasa membantu dalam pengerjaan Tugas Akhir ini. 8. Teman-teman Manis Manja, NONGKI, BAYI, dulur matematika 2013, dan semuanya yang telah memberikan semangat dalam pengerjaan Tugas Akhir ini. Penulis juga menyadari bahwa dalam Tugas Akhir ini masih terdapat kekurangan. Oleh sebab itu, kritik dan saran yang bersifat membangun sangat penulis harapkan demi kesempurnaan Tugas Akhir ini. Akhirnya, penulis berharap semoga Tugas Akhir ini dapat bermanfaat bagi banyak pihak. Surabaya, Januari 2017 Penulis xii
13 DAFTAR ISI HALAMAN JUDUL ABSTRAK ABSTRACT KATA PENGANTAR DAFTAR ISI DAFTAR GAMBAR DAFTAR TABEL DAFTAR SIMBOL i vii ix xi xiii xv xvii xix BAB I PENDAHULUAN Latar Belakang Rumusan Masalah Batasan Masalah Tujuan Manfaat Sistematika Penulisan BAB II TINJAUAN PUSTAKA Penelitian Terdahulu Model Dinamis Pelacakan Radar Tiga Dimensi Metode Kalman Filter Metode Extended Kalman Filter Modifikasi Extended Kalman Filter xiii
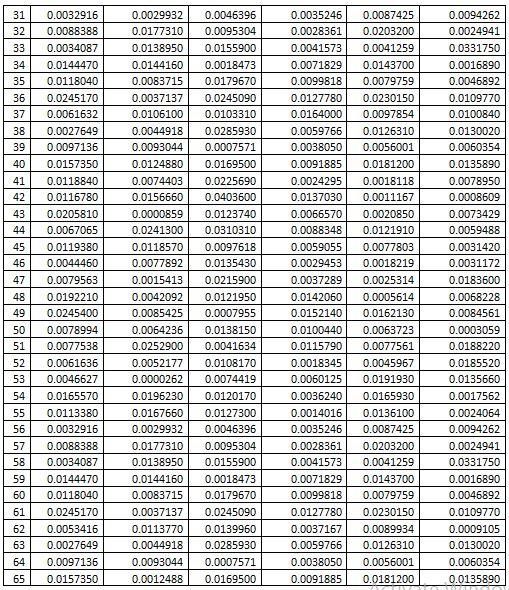
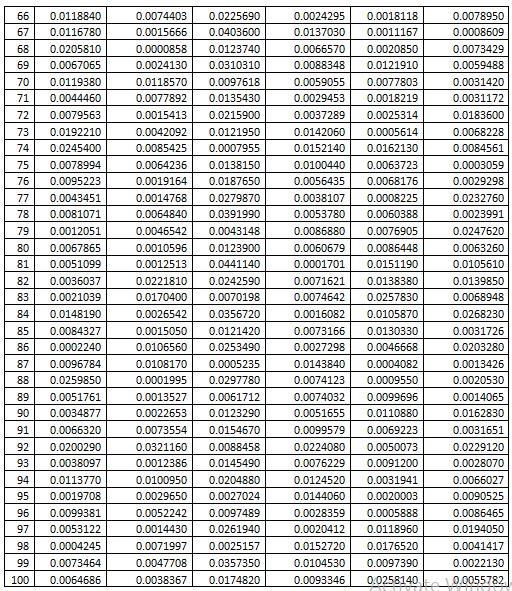
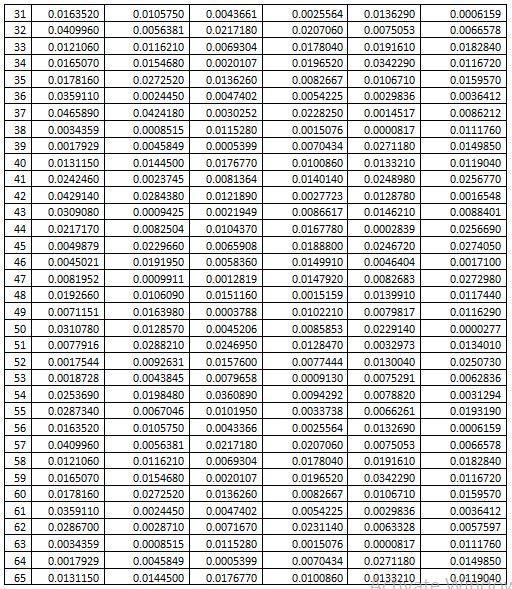
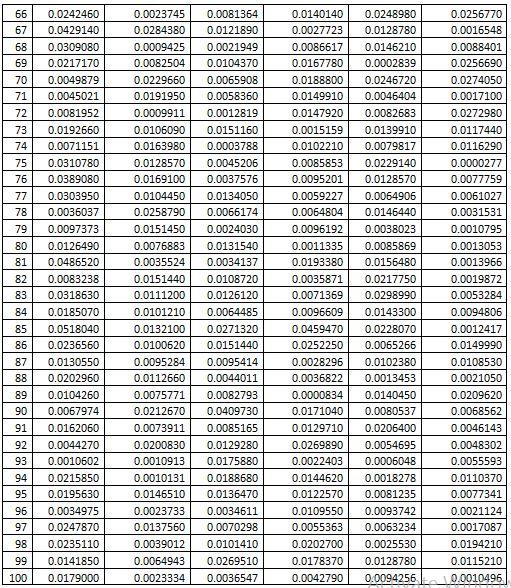
14 BAB III METODE PENELITIAN Studi Literatur Identifikasi model dinamis pelacakan radar tiga dimensi, Extended Kalman Filter dan modifikasinya Implementasi metode Extended Kalman Filter Implementasi modifikasi metode Extended Kalman Filter Simulasi, Analisis Hasil dan Pembahasan Penarikan Kesimpulan dan Saran BAB IV ANALISIS DAN PEMBAHASAN Persamaan Pelacakan Radar Tiga Dimensi Diskritisasi Pembentukan Sistem Diskrit Stokastik Implementasi Extended Kalman Filter Implementasi Modifikasi Extended Kalman Filter Simulasi Extended Kalman Filter dan Modifikasi Extended Kalman Filter Simulasi Simulasi BAB V PENUTUP Kesimpulan Saran DAFTAR PUSTAKA 67 LAMPIRAN A Data Nilai RMSE Setiap Variabel 69 LAMPIRAN B Source Code 75 LAMPIRAN C Biodata Penulis 89 xiv
15 DAFTAR GAMBAR Gambar 2.1 Konfigurasi geometri melalui r, θ,φ Gambar 3.1 Diagram Alur Penelitian Gambar 3.2 Diagram Alur Metode EKF Gambar 3.3 Diagram Alur Modifikasi EKF Gambar 4.1 Gambar 4.2 Gambar 4.3 Gambar 4.4 Gambar 4.5 Gambar 4.6 Gambar 4.7 Gambar 4.8 Gambar 4.9 Grafik Perbandingan Nilai Real dan Estimasi Posisi Variabel x Grafik Perbandingan Nilai Real dan Estimasi Posisi Variabel y Grafik Perbandingan Nilai Real dan Estimasi Posisi Variabel z Grafik Perbandingan Nilai Real dan Estimasi Kecepatan Variabel x Grafik Perbandingan Nilai Real dan Estimasi Kecepatan Variabel y Grafik Perbandingan Nilai Real dan Estimasi Kecepatan Variabel z Grafik Error antara Nilai Real dan Estimasi dari Semua Variabel Grafik lintasan yang terjadi dengan nilai awal pada Nilai Real selama 100 langkah Grafik lintasan yang terjadi dengan nilai awal oleh Metode Extended Kalman Filter selama 100 langkah xv
16 Gambar 4.10 Grafik lintasan yang terjadi dengan nilai awal oleh modifikasi Extended Kalman Filter selama 100 langkah xvi
17 DAFTAR TABEL Tabel 2.1 Algoritma Kalman Filter (KF) Tabel 2.2 Algoritma Extended Kalman Filter (KF). 16 Tabel 2.3 Modifikasi Algoritma Extended Kalman Filter Tabel 4.1 Nilai awal dari masing-masing variabel Tabel 4.2 Nilai Parameter Tabel 4.3 Nilai rata-rata RMSE setiap variabel xvii
18
19 Daftar Simbol x : Posisi variabel x. y : Posisi variabel y. z : Posisi variabel z. V x : Kecepatan variabel x. V y : Kecepatan variabel y. V z : Kecepatan variabel z. r : Jarak pelacak ke target. θ : Sudut putar sumbu x dan y. φ : Sudut elevasi sumbu x, y ke z. dr dt : Satuan kecepatan bernilai 1. dθ dt : Satuan kecepatan bernilai 1. dφ dt : Satuan kecepatan bernilai 1. X k+1 : Variabel keadaan pada waktu k + 1. X k : Variabel keadaan pada waktu k. A k : Matriks koefisien. B k : Matriks koefisien untuk input sistem. u k : Variabel input sistem. G k : Matriks koefisien noise sistem. w k : Noise sistem. Z k : Vektor pegukuran pada waktu ke-k. H k : Matriks koefisien pengukuran. v k : Noise pengukuran. P k : Matriks kovarian error pada waktu k. Q k : Matriks kovarian error noise sistem pada waktu k. R k : Matriks kovarian error noise pengukuran pada waktu k. ˆX k+1 : Estimasi variabel keadaan pada waktu k + 1 sebelum pengukuran. ˆX k+1 : Estimasi variabel keadaan pada waktu k + 1 sesudah pengukuran. P k+1 : Matriks kovarian error pada waktu k + 1 sebelum pengukuran. xix
20 P k+1 : Matriks kovarian error pada waktu k + 1 setelah pengukuran. K k+1 : Kalman Gain pada waktu k + 1. r k : Jarak pelacak ke target pada waktu k. θ k : Sudut putar sumbu x dan y pada waktu k. φ k : Sudut elevasi sumbu x, y ke z pada waktu k. rk m : Jarak pelacak ke target pada waktu k dengan gangguan. : Sudut putar sumbu x dan y pada waktu k dengan gangguan. θk m φ m k : Sudut elevasi sumbu x, y ke z pada waktu k dengan gangguan. vk r : Noise pengukuran r. vk θ : Noise pengukuran θ. v φ k : Noise pengukuran φ. x k : Posisi variabel x pada waktu k. y k : Posisi variabel y pada waktu k. z k : Posisi variabel z pada waktu k. x m k yk m zk m : Posisi variabel x pada waktu k dengan gangguan. : Posisi variabel y pada waktu k dengan gangguan. : Posisi variabel z pada waktu k dengan gangguan. σ r : Gangguan jarak r. σ θ : Gangguan sudut θ. σ φ : Gangguan sudut φ. Rk c : Kovarian buatan. R p k : Kovarian buatan untuk MEKF. µ c k : Mean buatan. µ p k : Mean buatan untuk MEKF. I : Matriks identitas. f 1 : ẋ dalam bentuk koordinat kartesian. f 2 : ẏ dalam bentuk koordinat kartesian. f 3 : ż dalam bentuk koordinat kartesian. f 4 : ẍ dalam bentuk koordinat kartesian. f 5 : ÿ dalam bentuk koordinat kartesian. : z dalam bentuk koordinat kartesian. f 6 xx
21 BAB I PENDAHULUAN Pada bab ini dijelaskan mengenai hal-hal yang menjadi latar belakang permasalahan yang dibahas dalam Tugas Akhir ini. Permasalahan-permasalahan tersebut disusun ke dalam suatu rumusan masalah. Selanjutnya dijabarkan juga batasan masalah untuk mendapatkan tujuan yang diingingkan serta manfaat yang dapat diperoleh dari Tugas Akhir ini. 1.1 Latar Belakang Radar merupakan singkatan dari Radio Detection and Ranging, yang berarti deteksi dan penjarakan radio adalah suatu sistem gelombang elektromagnetik yang berguna untuk mendeteksi, mengukur jarak dan membuat map benda-benda seperti pesawat terbang, berbagai kendaraan bermotor dan informasi cuaca (hujan). Konsep radar adalah mengukur jarak dari sensor ke target. Ukuran jarak tersebut didapat dengan cara mengukur waktu yang dibutuhkan gelombang elektromagnetik selama penjalarannya mulai dari sensor ke target dan kembali lagi ke sensor. Pelacakan radar tiga dimensi adalah pengembangan dari pelacakan radar dua dimensi yang meliputi jarak atau range dan arah sudutnya, sedangkan dalam pelacakan radar tiga dimensi meliputi jarak atau range, dan dua sudut (atau, dalam kasus radar array bertahap, dua arah sudut), dan turunannya sebagai ruang keadaan. Dalam beberapa aplikasi, parameter-parameter terkait dengan target yang bergerak dapat dimasukkan di dalam state vector untuk setiap filter atau penyaring [1]. Faktor internal atau eksternal dari pelacakan radar, 1
22 2 dapat menghambat keakuratan pelacakan radar terhadap target. Faktor-faktor internal atau eksternal itu meliputi pergeseran arah sudut, target yang hilang, dan sebagainya. Sistem pengendalian pelacakan radar yang telah dirancang sesuai kebutuhan dengan tingkat pengukuran yang akurat akan terdapat suatu noise. Noise ukurannya sangat kecil dan noise tersebut dapat terjadi pada noise sistem pengendalian pelacakan radar. Walaupun ukurannya sangat kecil, noise-noise tersebut dapat menghambat kinerja dari sistem pelacakan radar. Untuk mengatasi masalah kinerja dari sistem pelacakan radar, noise tersebut harus dihilangkan. Dengan mengurangi noise pada sistem dan pengukuran tersebut diperlukan adanya suatu pendekatan yang lebih akurat dari sebelumnya. Suatu pendekatan yang dilakukan yaitu berupa adanya estimator untuk mengetahui tingkat noise tersebut. Estimator digunakan untuk memprediksi variabel-variabel kontrol pelacakan radar dengan adanya noise tersebut [2]. Berdasarkan hasil penelitian yang dilakukan oleh Song- Taek Park dan Jang Gyu Lee pada tahun 2001 tentang Improved Kalman Filter Design for Three-Dimensional Radar Tracking [1]. Jurnal ini menjadi acuan utama dalam penulisan tugas akhir ini. Dalam jurnal ini, tingkat akurasi pengukuran dibandingkan antara metode Extended Kalman Filter dengan metode baru pengingkatan dari desain Kalman Filter, dan hasil dari simulasi ditunjukkan bahwa pengembangan Kalman Filter ini lebih baik hasilnya dalam mengukur posisi target dan kecepatan target yang dilacak oleh radar. Setelah dilakukan pemahaman terhadap jurnal ini, peningkatan Kalman Filter yang ditulis adalah modifikasi dari metode Extended Kalman Filter. Dalam topik tugas akhir ini akan dikaji mengenai jurnal terkait di mana mengestimasi pengukuran yang tak linier dari sistem
23 pelacakan radar tiga dimensi. Sistem dinamik diasumsikan menjadi linier sedangkan pengukurannya tak linier, maka dari itu diperlukan pengembangan dari Extended Kalman Filter agar bisa mengestimasi pengukuran dengan baik dan benar. Harapannya, pengembangan atau modifikasi metode ini dapat juga diterapkan dalam kasus pengukuran yang tak linier lainnya. Berdasarkan hasil penelitian lain yang dilakukan oleh Aisha S dan Keerthana P pada tahun 2015 tentang Extended Kalman Filter Modelling for Tracking Radar with Missing Measurements [3]. Pengukuran yang hilang ditekankan pada bahasan ini, dan dimodelkan dengan variabel acak yang berdistribusi Binomial dan diperoleh hasil estimasi pengukuran pelacakan radar tiga dimensi yang masih dirasa kurang akurat. Extended Kalman Filter juga digunakan dalam penelitian Nousheen Fahmedha, P Chaitanya Prakashm Pooja A dan Rachana R pada tahun 2015 tentang Estimation of System Parameters Using Kalman Filter and Extended Kalman Filter [4]. Berdasarkan penelitian tersebut, metode Kalman Filter tidak bisa digunakan pada parameter sistem dan/atau pengukuran yang tak linier. Maka dari itu untuk sistem tak linier menggunakan Extended Kalman Filter. Algoritma yang didiskusikan pada jurnal tersebut bisa diaplikasikan dalam aplikasi lain termasuk navigasi, kontrol robot, ekonomi, dan sebagainya. Dalam Tugas Akhir ini penulis membahas topik Estimasi Pelacakan Radar Tiga Dimensi menggunakan Modifikasi Extended Kalman Filter. Penelitian ini bermaksud untuk mengestimasi variabel keadaan agar mendapatkan tingkat kesalahan estimasi yang sangat kecil. 1.2 Rumusan Masalah Berdasarkan latar belakang yang telah disajikan, penulis menuliskan beberapa permasalahan yang akan dibahas dalam 3
24 4 penelitian Tugas Akhir ini sebagai berikut : 1. Bagaimana model dinamis pelacakan radar tiga dimensi? 2. Bagaimana hasil estimasi variabel posisi dan kecepatan dari target yang dilacak radar dengan menggunakan algoritma Extended Kalman Filter? 3. Bagaimana hasil estimasi variabel posisi dan kecepatan dari target yang dilacak radar dengan menggunakan modifikasi algoritma Extended Kalman Filter? 1.3 Batasan Masalah Dalam Tugas Akhir ini, penulis membatasi permasalahan sebagai berikut : 1. Sistem dinamis diasumsikan menjadi linier di mana vektor keadaan X k terdiri dari posisi dan kecepatan dari target yaitu yang bergerak dalam ruang tiga dimensi. 2. Model pelacakan radar yang diteliti mempunyai tiga dimensi pengukuran yang tak linier yaitu jarak r, sudut putar θ, dan sudut elevasi φ. 3. Software yang digunakan untuk simulasi adalah MATLAB. 1.4 Tujuan Tujuan dari penelitian Tugas Akhir ini adalah : 1. Mengetahui model dinamis pelacakan radar tiga dimensi. 2. Mengetahui hasil estimasi variabel posisi dan kecepatan dari target yang dilacak radar dengan menggunakan algoritma Extended Kalman Filter.
25 5 3. Mengetahui hasil estimasi variabel posisi dan kecepatan dari target yang dilacak radar dengan menggunakan modifikasi algoritma Extended Kalman Filter. 1.5 Manfaat Dari penelitian Tugas Akhir ini, penulis mengharapkan agar Tugas Akhir ini dapat bermanfaat bagi berbagai kalangan sebagai berikut : 1. Memperluas permasalahan yang dapat diterapkan dengan metode Extended Kalman Filter dan modifikasinya. 2. Menambah wawasan dan memberi gambaran tentang estimasi dengan menggunakan algoritma Extended Kalman Filter dan modifikasinya. 3. Sebagai bahan pertimbangan dalam estimasi sistem pelacakan radar tiga dimensi. 1.6 Sistematika Penulisan Penulisan Tugas Akhir ini disusun dalam lima bab, yaitu: 1. BAB I PENDAHULUAN Pada bab ini berisi tentang gambaran umum dari penulisan Tugas Akhir yang meliputi latar belakang, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian dan sistematika penulisan. 2. BAB II TINJAUAN PUSTAKA Pada Bab ini berisi tentang penelitian terdahulu, model dinamika pelacakan radar tiga dimensi dan Metode Extended Kalman Filter serta modifikasinya. 3. BAB III METODE PENELITIAN Pada bab ini dijelaskan tahapan-tahapan yang
26 6 dilakukan dalam pengerjaan Tugas Akhir. Tahapantahapan tersebut antara lain studi literatur, mengidentifikasi model pelacakan radar tiga dimensi, Extended Kalman Filter dan Modifikasi Extended Kalman Filter. Selanjutnya dilakukan implementasi metode Extended Kalman Filter dan modifikasinya. Tahap selanjutnya dilakukan simulasi dan analisis hasil. Tahap terakhir adalah melakukan penarikan kesimpulan berdasarkan hasil analisis serta saran. 4. BAB IV HASIL DAN PEMBAHASAN Pada Bab ini dibahas mengenai penerapan model dinamik pelacakan radar tiga dimensi dengan metode Extended Kalman Filter dan modifikasinya. Selanjutnya akan diperoleh hasil estimasi dari Extended Kalman Filter dan modifikasinya Kalman Filter. 5. BAB V PENUTUP Pada bab ini berisi mengenai kesimpulan akhir yang diperoleh dari Tugas Akhir serta saran untuk pengembangan penelitian selanjutnya.
27 BAB II TINJAUAN PUSTAKA Pada bab ini diuraikan mengenai hasil dari penelitianpenelitian sebelumnya yang terkait dengan permasalahan dalam Tugas Akhir ini. Selain itu juga diuraikan mengenai model dinamis pelacakan radar tiga dimensi serta algoritma Extended Kalman Filter sebagai modal awal pengembangan atau modifikasinya yang diterapkan ke dalam sistem pengukuran tak linier. 2.1 Penelitian Terdahulu Dalam Tugas Akhir ini penulis merujuk pada beberapa penelitian-penelitian sebelumnya yang sesuai dengan topik yang diambil. Salah satu penelitian yang digunakan adalah jurnal yang ditulis oleh Song-Taek Park dan Jang Gyu Lee pada tahun 2001 yang berjudul Improved Kalman Filter Design for Three-Dimensional Radar Tracking. Pada penelitian tersebut menyatakan bahwa estimasi dari model dinamis pelacakan radar yang terdiri dari model tak linier telah menunjukkan hasil estimasi yang lebih baik dari pada menggunakan metode Extended Kalman Filter [1]. Penelitian tersebut yang menjadi acuan utama dalam tugas akhir ini. Dalam penelitan terkait, sistem dinamik diasumsikan menjadi linier sedangkan pengukurannya tak linier, maka dari itu diperlukan pengembangan dari Extended Kalman Filter agar bisa mengestimasi pengukuran dengan baik dan benar. Harapannya, pengembangan atau modifikasi metode ini dapat juga diterapkan dalam kasus pengukuran yang tak linier lainnya. Berdasarkan penelitian lainnya 7
28 8 yang ditulis oleh Aisha S pada tahun 2015 yang berjudul Extended Kalman Filter Modelling for Tracking Radar with Missing Measurements. Pada penelitian tersebut dilatarbelakangi oleh pelacakan radar di mana pengukuran yang hilang karena faktor seperti kegagalan sensor sementara dan kemacetan jaringan. Pengukuran yang hilang dimodelkan oleh serangkaian variabel acak saling independen berdasarkan kepada Distribusi Bernoulli. Parameter filter yang diinginkan diperoleh dari memodifikasi persamaan Riccati dari bentuk rekursif. Algoritma filter menjamin bahwa kovarian kesalahan saringan terletak dalam batas yang dapat diterima untuk target dinamis yang berbeda [3]. Pelacakan radar sudah pernah diteliti juga oleh Donald Leskiw dalam jurnalnya yang berjudul The Extended Preferred Ordering Theorem for Radar Tracking Using the Extended Kalman Filter pada tahun 2011 [5]. Dalam jurnal tersebut pelacakan radar yang diukur adalah berdimensi dua, dan hasilnya menunjukkan bahwa metode Extended Kalman Filter cukup baik dalam mengestimasi pengukuran sistem, maka dari itu ingin juga diterapkan dalam pelacakan radar tiga dimensi. Pada penelitian lain yang ditulis oleh Nousheen Fahmedha pada tahun 2015 yang berjudul Estimation of System Parameters Using Kalman Filter and Extended Kalman Filter. Pada penelitian tersebut metode Extended Kalman Filter dinyatakan lebih akurat dibandingkan dengan metode Kalman Filter karena memiliki rata-rata norm kovariansi error dan rata-rata error yang paling kecil dan model yang dipakai tak linier [4]. Berdasarkan penelitian-penelitian tersebut, pada Tugas Akhir ini dilakukan pengembangan atau modifikasi Extended Kalman Filter dalam estimasi pelacakan radar tiga dimensi.
29 9 2.2 Model Dinamis Pelacakan Radar Tiga Dimensi Diasumsikan kasus yang terjadi pada pelacakan radar tiga dimensi, sensor mengukur target meliputi tiga dimensi berikut yaitu range ( jarak ) r, azimuth angle (sudut putar) θ, dan elevation angle (sudut elevasi) φ seperti ditunjukkan pada gambar berikut Gambar 2.1: Konfigurasi geometri melalui r, θ,φ dengan beberapa informasi penting : sin θ = y x 2 + y 2 cos θ = sin φ = cos φ = x x 2 + y 2 z x 2 + y 2 + z 2 x 2 + y 2 x 2 + y 2 + z 2 Range r menunjukkan jarak pengukuran target dari pusat pelacak, sedangkan azimuth angle atau sudut putar θ
30 10 menunjukkan arah gerak pelacak berputar searah sumbu x dan y dengan 0 θ 2π, dan elevation angle φ menunjukkan arah gerak pelacak berelevasi searah x,y ke sumbu z dengan 0 φ π. Maka persamaannya dapat dijabarkan melalui : r = x 2 + y 2 + z 2 tan θ = y x θ = tan 1 ( y x ) tan φ = z x 2 + y 2 φ = tan 1 z ( x 2 + y ) 2 Sehingga diperoleh persamaan : r = (x 2 + y 2 + z 2 ) 1 2 (2.1) θ = tan 1 ( x y ) (2.2) φ = tan 1 z ( x 2 + y ) (2.3) 2 Persamaan (2.1)-(2.3) merupakan model pengukuran yang akan dipakai dalam Tugas Akhir ini. Untuk memudahkan, ketiga persamaan (2.1) (2.3) yang diperoleh dari bentuk sferis ditransformasikan ke dalam bentuk koordinat bola melalui transformasi pengukuran sebagai berikut : x = rcos θcos φ (2.4) y = rsin θcos φ (2.5) z = rsin φ (2.6) dengan x,y, dan z adalah komponen skalar dari koordinat bola pengukuran yang dideskripsikan sebagai posisi dari target
31 11 yang bergerak dalam ruang tiga dimensi [6]. Dengan menggunakan aturan rantai, maka persamaan (2.4) (2.6) menjadi sebagai berikut : a Untuk variabel x x = rcos θcos φ yang bergantung terhadap waktu t, menjadi : dimisalkan : x(t) = r(t)cos(θ(t))cos(φ(t)) (2.7) u 1 = r(t) v 1 = cos(θ(t)) w 1 = cos(φ(t)) dengan menggunakan sifat (u 1 v 1 ) = u 1 v 1 + v 1 u 1 diturunkan dan didapat : (u 1 v 1 w 1 ) = u 1 v 1w 1 +u 1 v 1 w 1+ u 1 v 1 w 1, sehingga persamaan (2.7) menjadi : dx(t) dt dx dt = dr(t) dt cos(θ(t))cos(φ(t)) + r(t) dcos(θ(t)) cosφ(t) + dt r(t)cosθ(t) dcos(θ(t)) dt = cos θcos φdr rsin θcos φdθ rcos θsin φdφ dt dt dt b Untuk variabel y y = rsin θcos φ yang bergantung terhadap waktu t, menjadi : dimisalkan : x(t) = r(t)sin(θ(t))cos(φ(t)) (2.8) u 2 = r(t) v 2 = sin(θ(t)) w 2 = cos(φ(t))
32 12 dengan menggunakan sifat (u 2 v 2 ) = u 2 v 2 + v 2 u 2 diturunkan didapat : (u 2 v 2 w 2 ) = u 2 v 2w 2 + u 2 v 2 w 2 + u 2 v 2 w 2, sehingga persamaan (2.8) menjadi : dy(t) dt dy dt = dr(t) dt sin(θ(t))cos(φ(t)) + r(t) dsin(θ(t)) cosφ(t) + dt r(t)sinθ(t) dcos(φ(t)) dt = sin θcos φdr + rcos θcos φdθ rsin θsin φdφ dt dt dt c Untuk variabel z z = r sinφ yang bergantung terhadap waktu t, menjadi : z(t) = r(t)sin(φ(t)) (2.9) dimisalkan : u 3 = r(t) v 3 = sin(φ(t)) dengan menggunakan sifat (u 3 v 3 ) = u 3 v 3 + v 3 u 3, sehingga persamaan (2.9) menjadi : dz(t) dt dz dt dengan demikian, berikut : dx dt dy dt dz dt = dr(t) sinφ(t) + r(t) dsin(φ(t)) dt dt = sinφ dr dt + rcosφdφ dt didapatkan model dinamisnya sebagai = cos θcos φ dr rsin θcos φdθ rcos θsin φdφ dt dt dt (2.10) = sin θcos φ dr + rcos θcos φdθ rsin θsin φdφ dt dt dt (2.11) = sin φ dr + rcos φdφ dt dt. (2.12)
33 13 Persamaan (2.10) (2.12) adalah sistem dinamis yang akan diestimasi menggunakan Extended Kalman Filter dan modifikasinya serta dapat dibentuk sebagai ruang keadaan : ẋ cosθcosφ rsinθcosφ rcosθsinφ ẏ = sinθcosφ rcosθcosφ rsinθsinφ ż sinφ 0 rcosφ dr dt dθ dt dφ dt (2.13) Bentuk dari Persamaan(2.13) adalah ruang keadaan yang akan digunakan dalam estimasi nantinya dengan nilai dari dr dt = dθ dt = dφ dt = 1 karena dianggap sebagai vektor satuan kecepatan. 2.3 Metode Kalman Filter Metode Kalman Filter diperkenalkan pertama kali oleh R.E. Kalman pada tahun 1960 [6]. Kalman Filter merupakan sebuah algoritma pengolahan data yang optimal. Kalman Filter merupakan suatu estimator sistem dinamik linear. Kalman filter mampu mengestimasi variabel keadaan dinamis dari sistem dengan dua tahapan yaitu tahap prediksi dan tahap koreksi. Tahap prediksi (time update) merupakan tahap estimasi dari sistem model dinamik, sedangkan tahap koreksi (measurement update) merupakan tahap estimasi dari model pengukuran [7]. Algoritma Kalman Filter waktu diskrit ditulis sebagai berikut: Model sistem : Model pengukuran : dengan asumsi : x k+1 = Ax k + Bu k + Gw k z k = Hx k + v k x 0 N(x 0, P x0 ), w k N(0, Q k ), v k N(0, R k )
34 14 Pada Kalman Filter, estimasi dilakukan dengan dua tahapan yaitu tahap prediksi (time update) dan tahap koreksi (measurement update). Tahap prediksi yaitu memprediksi variabel keadaan dan tingkat akurasinya dihitung menggunakan persamaan kovarian error atau norm kovariansi error. Pada tahap koreksi, hasil estimasi variabel keadaan dikoreksi menggunakan model pengukuran. Salah satu bagian dari tahap ini yaitu menentukan matriks Kalman Gain yang digunakan untuk meminimumkan kovariansi error [8]. Tahap prediksi dan tahap koreksi akan diulang terus menerus sampai waktu k yang ditentukan. Algoritma Kalman Filter diberikan pada Tabel 2.1 Tabel 2.1: Algoritma Kalman Filter (KF) Model Sistem x k+1 = Ax k + Bu k + Gw k Model Pengukuran z k = Hx k + v k Asumsi x 0 N(x 0, P x0, w k N(0, Q k ), v k N(0, R k ) Inisialisasi x 0 = x 0 P 0 = P x0 Tahap Prediksi Estimasi : x (k+1) = A x k + Bu k Kovarian error : P k+1 = AP ka T + GQG T Tahap Koreksi Kalman Gain : K k+1 = P k+1 HT (HP k+1 HT + R) 1 Estimasi : x k = x k+1 + K k+1(z k+1 H x k+1 ) Kovarian error : P k+1 = [I K k+1 H k+1 ] P k+1 [I K k+1 H k+1 ] T + K k+1 R k+1 Kk+1 T
35 Metode Extended Kalman Filter Dalam Kalman Filter model yang digunakan adalah linier, tetapi pada kenyataannya banyak model tak linier. Oleh sebab itu, dikembangkan metode Extended Kalman Filter yang digunakan untuk menyelesaikan model tak linier. Misalkan diberikan model stokastik tak linier : X k+1 = f(x k, u k ) + w k (2.14) dengan model pengukuran tak linier Z k R n yang memenuhi Z k = h k (X k ) + v k (2.15) yang mana diasumsikan bahwa X 0 N( X 0, P X0 ), w k N(0, Q k ), dan v k N(0, R k ) memiliki sebaran normal dan diasumsikan white, artinya tidak berkorelasi satu sama lain maupun dengan nilai awal X0. Sebelum proses estimasi, dilakukan proses linearisasi terlebih dahulu pada sistem tak linier. Proses linierisasi dilakukan dengan mendefinisikan sebagai berikut : X k+1 = f( X k, u k ) Zk+1 = h(xk+1 [ ) ] fi A = [A i,j ] = ( X X k, u k ) j [ ] hi H = [H i,j ] = (Xk+1 X ) j A dan H adalah matriks Jacobi yang diperoleh dari penurunan f dan h terhadap arah X. Modifikasi dari algoritma Kalman Filter inilah yang disebut algoritma Extended Kalman Filter [8]. Algoritma Extended Kalman Filter diberikan pada Tabel 2.1.
36 16 Tabel 2.2: Algoritma Extended Kalman Filter (KF) Model Sistem X k+1 = f(x k, u k ) + w k Model Pengukuran Z k+1 = h(x k+1 ) + v k Asumsi X 0 N(X 0, P X0 ), w k N(0, Q k ), v k N(0, R k ) Inisialisasi X0 = X 0 P [ 0 = P X0 Tahap Prediksi A = fi X j ( X ] k, u k ) Estimasi : X k = f( X k, u k ) Kovarian error : P k+1 = AP k + P A T + G k Q k G T k Tahap Koreksi Kalman Gain : K k+1 = P [ k+1 HT Hk P ] 1 k+1 HT + R k+1 Estimasi : X k+1 = X k+1 + K k+1(z k+1 h( X k+1 )) Kovarian error : P k+1 = [I K k H] P k Modifikasi Extended Kalman Filter Modifikasi Extended Kalman Filter merupakan hasil pengembangan dari metode Extended Kalman Filter. Berdasarkan penelitian yang sudah dilakukan oleh Song Taek Park dan Jan Gyuu Lee [1], berikut akan dijelaskan bagaimana modifikasi Extended Kalman Filter dirumuskan secara langsung pada kasus pelacakan radar tiga dimensi. Secara garis besar, metode ini sama dengan metode Extended Kalman Filter. Perbedaan yang paling utama adalah
37 perbedaan kovarian error pengukuran R p k+1 dan penambahan mean buatan µ p k ke dalam tahap koreksi, sedangkan pada tahap prediksi sama dengan metode Extended Kalman Filter. Sepenuhnya, penurunan model sistem dan model pengukuran serta asumsi-asumsi yang dibuat sama dengan metode yang sudah dijelaskan sebelumnya. Berikut akan dijabarkan runtutan algoritma pengembangan dari metode Extended Kalman Filter ini. Berdasarkan Persamaan pengukuran (2.15), Pada modifikasi Extended Kalman Filter Persamaan ini direpresentasikan dalam bentuk : 17 r m k r k Z k = θk m = θ k + φ m k φ k vk r vk θ v φ k (2.16) persamaan yang ditulis pada (2.16), m mengacu pada hasil pengukuran. Dengan mentransformasikan vektor pengukuran ke koordinat bola melalui transformasi pengukuran mengikuti x m k r yk m k m cos θm k cos φm k = r m zk m k sin θm k cos φm k (2.17) rk m sin θm k cos vm k Pada baris ke-3 dalam Persamaan (2.17) di atas tidak punya bentuk z m k = r m k sin φm k. Unsur semu cos vθ k telah disisipkan untuk menyederhanakan representasi dari kesalahan pengukuran koordinat bola. Menggunakan (2.16) pengukuran yang diukur dapat diekspresikan sebagai x m (r k k + v yk m k m ) cos(θ k + vk θ)cos(φ k + v φ k ) = (r k + v r zk m k )sin(θ k + vk θ)cos(φ k + v φ k ) (r k + vk r)sin(θ k + vk θ)cosvφ k
38 18 (r k + vk r k cos vφ k (r k + v = C k (r k + vk r)sin vθ k cos k r ksin φ k sin vk θsin vφ k vφ k + (r k + vk r)cos θ ksin φ k sin vk θsin vφ k (r k + vk r)cos vθ k sin vφ k 0 (2.18) dengan C k adalah matriks transformasi didefinisikan oleh : cos θ k cos φ k sin θ k cos φ k cos θ k sin φ k C k = sin θ k cos φ k cos θ k cos φ k sin θ k sin φ k (2.19) sin φ k 0 cos φ k Bentuk koordinat yang sebenarnya dari posisi target adalah : x k r k cos θ k cos φ k y k = r k sin θ k cos φ k z k r k sin φ k = C k r k 0 0 (2.20) dari (2.18) dan (2.20), error-error antara bentuk koordinat sebenarnya dengan bentuk koordinat dengan gangguan untuk setiap koordinat dapat direpresentasikan sebagai x k x m k x k y k = yk m y k z k zk m z k (r k + vk r)cos vθ k cos vφ k r k (r k + v = C k (r k + vk r)sin vθ k cos k r)sin θ ksin φ k sin vk θsin vφ k vφ + k (r k + v (r k + vk r)cos vθ k sin k r)cos θ ksin φ k sin vk θsin vφ k vφ 0 k (2.21) Didefinisikan matriks T k berukuran 3 x 4 dengan elemennya C k yang sudah disebutkan pada (2.19) sebagai berikut - T k = sin θ k sin φ k (2.22) C k cos θ k sin φ k 0
39 19 Vektor kesalahan (2.21) dapat direpresentasikan dalam bentuk lebih sederhana mengikuti : (r k + vk r x k )cos vθ k cos vφ k r k y k (r = T k + vk r k )sin vθ k cos vφ k z (r k + v r k k )cos vθ k sin vφ k (r k + vk r)sin vθ k sin vφ k Mean dan kovariansi error dari vektor kesalahan pengukuran koordinat dapat diperoleh, diberikan sebagai berikut : E[ x k ] µ c k = E[ y k ] E[ z k ] r k (e (σ 2 θ +σ2 φ ) 2 1 ) = T k (σθ r 2+σ2 φ ) k 2 = T k 0 (2.23) 0 0 dan var( x k ) cov( x k, y k ) cov( x k, z k ) Rk c = cov( x k, y k ) var( y k ) cov( x k, z k ) cov( x k, z k ) cov( y k, z k ) var( z k ) a = T k 0 b c 33 0 (2.24) d 44
40 20 dengan T k pada Persamaan (2.22) dan elemen-elemen R c k sebagai berikut a 11 = (r2 k + σ2 r)(1 + e 2σ2 θ )(1 + e 2σ2 φ) 4 r 2 k e (σ2 θ +σ2 φ ) b 22 = (r2 k + σ2 r)(1 e 2σ2 θ )(1 + e 2σ2 φ) 4 c 33 = (r2 k + σ2 r)(1 + e 2σ2 θ )(1 e 2σ2 φ) 4 d 44 = (r2 k + σ2 r)(1 e 2σ2 θ )(1 e 2σ2 φ) 4 Di sini Ekspektasi dievaluasi di bawah asumsi Gaussian, menggunakan persamaan berikut : E[sin v θ k ] = 0 E[cos v θ k ] = e σ2 θ /2 E[sin 2 v θ k ] = (1 e 2σ2 θ ) 2 E[cos 2 v θ k ] = (1 + e 2σ2 θ ) 2 Sehingga didapat σ r 2 + r2 k (σ2 θ +σ4 φ ) Rk c T 0 r k k 2σ2 θ rk 2σ2 φ 0 T k T r 2 k σ2 θ σ2 φ Seperti yang sudah didefinisikan model pengukuran pada
41 21 Persamaan (2.1)-(2.3) maka dapat ditulis kembali h(x k ) = = r k θ k φ k x 2 k + y2 k + z2 k tan 1 ( y k x k ) (2.25) tan 1 z ( k x 2 k +y 2 k model pengukuran (2.25) dilinierkan menggunakan Metode Jacobian sebagai berikut: H = [H i,j ] = [ ] hi (X k ) x j Sehingga matriks H menjadi cosθ k cosφ k sinθ k cosφ k sinφ k H = sinθ k cosθ k r k cosφ k r k cosφ k cosφ k r k cosθ k sinφ k r k sinθ k sinφ k r k dengan mengubah elemennya menjadi koordinat kartesian, didapatkan : H = x k x 2 k +yk 2+z2 k y k x k x 2 k +yk 2+z2 k x k z k x 2 k +yk 2(x2 k +y2 k +z2 k y k x 2 k +yk 2+z2 k x k x 2 k +y2 k y k z k x 2 k +yk 2(x2 k +y2 k +z2 k z k x 2 k +yk 2+z2 k x 2 k +y 2 k x 2 k +y2 k +z2 k (2.26) Matriks H pada Persamaan (2.26) inilah yang nanti akan digunakan dalam algoritma Modifikasi EKF. Dicari juga J k
42 22 adalah matriks Jacobian posisinya. J k = = x r y r z r x θ y θ z θ x φ y φ z φ cos θ k cosφ k r k sinθ k cosφ k r k cosθ k sinφ k sinθ k cosφ k r k cosθ k cosφ k r k sinθ k sinφ k sinφ k 0 r k cosφ k dengan mengubah elemennya menjadi koordinat kartesian, didapatkan : x k y x 2 k +y 2 k x kz k k +z2 k x 2 k +yk 2 y k J k = x x 2 k +yk 2 k y kz k +z2 x 2 k k +y2 k (2.27) x k 0 x 2 k + y2 k x 2 k +y 2 k +z2 k Setelah itu untuk mendapatkan R p k didapat melalui : R p k = J 1 k Rc 1 k (Jk )T r R p k 0 r 22 0 (2.28) 0 0 r 33 dengan J k pada Persamaan (2.27) dan elemen R p k pada Persamaan (2.28) adalah r 11 σ 2 r + (r 2 k (σ4 θ + σ4 φ ))/2 + r2 k σ2 θ σ2 θcos 4 (φ k ) + r 2 k σ2 φ σ2 φ r 22 σ 2 θ r 33 σ 2 φ Karena nilai σθ 2 dan σ2 φ relatif kecil, maka nilainya diabaikan sehingga R p k menjadi : R p k σr 2 + r2 k (σ4 θ +σ4 φ ) σθ 2 0 (2.29) 0 0 σθ 2
43 23 Selanjutnya akan dijabarkan bagaimana mendapatkan µ p k. Didefinisikan Tahap Koreksi pada Modifikasi Extended Kalman Filter : J 1 k (Z k H k ˆx k µ c k ) dengan r k m r k 2 [( θ k m)2 + ( φ m k )2 σθ 2 σ2 φ ] θ k m(1 φ m k tan φ k) φ m k r m k = rm k r k, θ m k = θm k θ k, φ m k = φm k φ k (2.30) di mana elemen-elemen dari Persamaan (2.30) dapat dilihat dari Persamaan (2.16) dan (2.25). Diasumsikan bahwa φ m k tanφ k 1 sehingga didapat J 1 k (Z k H k ˆx k µ c k ) Z k h(x k ) µ p k (2.31) Persamaan (2.30) yang akan digunakan dalam Tahap Koreksi Modifikasi Extended Kalman Filter, dengan ] r k [(θ m µ p k k )2 + (φ m k )2 σθ 2 σ2 φ 0 (2.32) 0 Kovarian error R p k pada Persamaan (2.29) dan mean µp k pada Persamaan (2.32) tersebut yang akan disisipkan ke dalam modifikasi EKF, modifikasi EKF diberikan pada Tabel 2.3
44 24 Tabel 2.3: Modifikasi Algoritma Extended Kalman Filter Model Sistem X k+1 = f(x k, u k ) + w k Model Pengukuran Z k+1 = h(x k+1 ) + v k Asumsi x 0 N(X 0, P X0 ), w k N(0, Q k ), v k N(0, R k ) Inisialisasi X0 = X 0 P [ 0 = P X0 Tahap Prediksi A = fi X j ( X ] k, u k ) Estimasi : X k = f( X k, u k ) Kovarian error : P k+1 = AP k + P A T + G k Q k G T k Tahap Koreksi Kalman Gain : K k+1 = P [ HT Hk P k+1 HT + Rk+1] p 1 Estimasi : X k+1 = X k+1 +K k+1 (z k+1 h( X k+1 ) µp k+1 ) Kovarian error : P k+1 = [I K k H] P k+1
45 BAB III METODE PENELITIAN Pada bab ini akan dijelaskan bagaimana langkah-langkah yang digunakan dalam mengestimasi pelacakan radar tiga dimensi menggunakan metode Exteneded Kalman Filter dan modifikasinya. Tahapan penelitian dalam Tugas Akhir ini terdiri atas tujuh tahap, yaitu studi literature, mengkaji model dinamika pelacakan radar tiga dimensi, Extended Kalman Filter dan modifikasinya, implementasi metode, analisis dan pembahasan, penarikan kesimpulan, dan pembuatan laporan Tugas Akhir. Adapun metode penelitian yang digunakan adalah sebagai berikut. 3.1 Studi Literatur Pada tahap ini dilakukan studi referensi tentang model dinamika pelacakan radar, algoritma Extended Kalman Filter dan modifikasinya. Referensi yang digunakan adalah bukubuku, skripsi, thesis dan paper-paper dalam jurnal ilmiah yang berkaitan dengan topik pada Tugas Akhir ini. 3.2 Identifikasi model dinamis pelacakan radar tiga dimensi, Extended Kalman Filter dan modifikasinya Pada tahap ini akan dilakukan pemahaman mengenai model dinamika pelacakan radar tiga dimensi. Model pelacakan radar tiga dimensi merupakan model tak linier dan akan dibentuk model state space yang selanjutnya dilakukan pendiskritan. Selanjutnya akan dilakukan estimasi sistem dengan menggunakan Extended Kalman Filter di antaranya pelinieran yang digunakan sebagai matriks masukan dalam 25
46 26 sistem. Setelah itu diolah ke tahap prediksi, koreksi dan simulasi. Selanjutnya akan dilakukan pengkajian mengenai modifikasi algoritma Extended Kalman Filter yang tidak jauh beda dengan algoritma Extended Kalman Filter tetapi dikembangkan dari metode sebelumnya dan langsung diterapkan ke dalam model pengukuran pelacakan radar tiga dimensi yang mewakili model pengukuran tak linier. 3.3 Implementasi metode Extended Kalman Filter Metode Extended Kalman Filter digunakan untuk sistem model tak linier. Adapun langkah-langkah yang dilakukan untuk estimasi target dalam pelacakan radar dengan menggunakan metode Extended Kalman Filter adalah sebagai berikut : a. Menentukan model sistem dan model pengukuran Berdasarkan persamaan (2.13)-(2.14) perihal model sistem dan model pengukuran metode Extended Kalman Filter diperoleh model sistemnya yaitu pada persamaan (2.1)-(2.3) dan model pengukuran : Z k = h k (X k ) + v k Z k = r k θ k + φ k vk r vk θ v φ k b. Pendiskritan Metode Extended Kalman Filter yang digunakan yaitu algoritma Extended Kalman Filter waktu diskrit (Discrete-time Extended Kalman Filter). Oleh karena itu, model pelacakan radar tiga dimensi didiskritisasi dengan menggunakan metode Beda Hingga Maju karena
47 27 diprediksi satu langkah ke depan. ẋ = dx dt = x k+1 x k t ẏ = dy dt = y k+1 y k t ż = dz dt = z k+1 z k t c. Pelinieran Model dinamika pelacakan radar tiga dimensi merupakan model tak linier sehingga dilakukan proses pelinieran dengan menggunakan Metode Jacobian sehingga didapat matriks Jacobaian sebagai berikut: A = f 1 x k f 2 f 1 y k f 2 f 1 z k f 2 f 1 Vk x f 2 x k f 3 y k f 3 z k f 3 Vk x f 3 x k f 4 y k f 4 z k f 4 Vk x f 4 x k f 5 y k f 5 z k f 5 Vk x f 5 x k f 6 y k f 6 z k f 6 Vk x f 6 x k y k z k Vk x f 1 V y k f 2 Vk x f 3 V y k f 4 V y k f 5 V y k f 6 V y k f 1 Vk z f 2 Vk z f 3 Vk z f 4 Vk z f 5 Vk z f 6 Vk z d. Tahap Prediksi Pada tahap prediksi ini menghitung kovarian error dan estimasi pada model sistem e. Tahap Koreksi Pada tahap koreksi ini menghitung Kalman Gain, kovarian error pada model pengukuran kemudian diperoleh hasil estimasi. Pada tahap ini, perhitungan dikatakan bagus jika nilai kovarian errornya semakin kecil dan juga perhitungan dikatakan bagus jika nilai errornya semakin kecil pula.
48 Implementasi modifikasi metode Extended Kalman Filter Modifikasi metode Extended Kalman Filter juga digunakan sistem model tak linier. Adapun langkah-langkah yang dilakukan untuk estimasi target dalam pelacakan radar dengan menggunakan metode Extended Kalman Filter tidak jauh berbeda dengan algoritma Extended Kalman Filter adalah sebagai berikut : a. Menentukan model sistem dan model pengukuran Berdasarkan persamaan (2.13)-(2.14) perihal model sistem dan model pengukuran metode Extended Kalman Filter diperoleh model sistemnya yaitu pada persamaan (2.1)-(2.3) dan model pengukuran : Z k = h k (X k ) + v k Z k = r k θ k + φ k vk r vk θ v φ k b. Pendiskritan Metode Extended Kalman Filter yang digunakan yaitu algoritma Extended Kalman Filter waktu diskrit (Discrete-time Extended Kalman Filter). Oleh karena itu, model pelacakan radar tiga dimensi didiskritisasi dengan menggunakan metode Beda Hingga Maju karena diprediksi satu langkah ke depan. ẋ = dx dt = x k+1 x k t ẏ = dy dt = y k+1 y k t ż = dz dt = z k+1 z k t
49 29 c. Pelinieran Model dinamika pelacakan radar tiga dimensi merupakan model tak linier sehingga dilakukan proses pelinieran dengan menggunakan Metode Jacobian sehingga didapat matriks Jacobian sebagai berikut: A = f 1 x k f 2 f 1 y k f 2 f 1 z k f 2 f 1 Vk x f 2 x k f 3 y k f 3 z k f 3 Vk x f 3 x k f 4 y k f 4 z k f 4 Vk x f 4 x k f 5 y k f 5 z k f 5 Vk x f 5 x k f 6 y k f 6 z k f 6 Vk x f 6 x k y k z k Vk x f 1 V y k f 2 Vk x f 3 V y k f 4 V y k f 5 V y k f 6 V y k f 1 Vk z f 2 Vk z f 3 Vk z f 4 Vk z f 5 Vk z f 6 Vk z d. Tahap Prediksi Pada tahap prediksi ini menghitung kovarian error dan estimasi pada model sistem e. Tahap Koreksi Pada tahap koreksi ini menghitung Kalman Gain, kovarian error pada model pengukuran kemudian diperoleh hasil estimasi. Pada Bab II, sudah dicari µ p k+1 dan Rp k+1 yang akan disisipkan ke dalam tahap ini. Pada tahap ini, perhitungan dikatakan bagus jika nilai kovarian errornya semakin kecil dan juga perhitungan dikatakan bagus jika nilai errornya semakin kecil pula. 3.5 Simulasi, Analisis Hasil dan Pembahasan Pada tahap ini dilakukan penerapan model pelacakan radar tiga dimensi dengan algoritma Extended Kalman Filter dan modifikasi Extended Kalman Filter. Selanjutnya dilakukan simulasi dengan menggunakan software MATLAB untuk mengetahui hasil estimasi dan dilakukan analisis terhadap hasil simulasi yang diberikan pada tahap sebelumnya
50 30 dan dilakukan perbandingan antara metode Extended Kalman Filter dan modifikasi dari metode ini, mana yang lebih sensitif pada estimasi pengukuran sistem pelacakan radar tiga dimensi akan dibahas pada tahap ini. 3.6 Penarikan Kesimpulan dan Saran Pada tahap ini dilakukan penarikan kesimpulan berdasarkan hasil simulasi dan pembahasan pada tahap sebelumnya. Selanjutnya dari hasil kesimpulan-kesimpulan yang terjadi diberikan saran untuk penelitian selanjutnya.

51 Gambar 3.1: Diagram Alur Penelitian 31
52 32 Gambar 3.2: Diagram Alur Metode EKF

53 Gambar 3.3: Diagram Alur Modifikasi EKF 33
54
55 BAB IV ANALISIS DAN PEMBAHASAN Pada bab ini dibahas mengenai estimasi optimal pada sistem pelacakan radar tiga dimensi. Pembahasan diawali dengan pembentukan model ruang keadaan (state space) waktu diskrit stokastik. Selanjutnya dilakukan proses estimasi dengan algoritma Extended Kalman Filter dan juga dilakukan proses estimasi dengan modifikasi dari algoritma yang langsung diterapkan dalam sistem pelacakan radar tiga dimensi. Setelah itu melakukan simulasi dengan software MATLAB untuk memperoleh tingkat keakurasian dari kedua algoritma dan menganalisis hasilnya. 4.1 Persamaan Pelacakan Radar Tiga Dimensi Pada bagian ini akan dibahas bagaimana model pelacakan radar tiga dimensi. Seperti yang telah dijelaskan pada Bab II melalui gambar dan persamaan berikut : 35
56 36 dengan beberapa informasi penting : sinθ = cosθ = sinφ = cosφ = y x 2 + y 2 x x 2 + y 2 z x 2 + y 2 + z 2 x 2 + y 2 x 2 + y 2 + z 2 tanθ = y x θ = tan 1 ( y x ) tan φ = z x 2 + y 2 φ = tan 1 z ( x 2 + y ) 2 Persamaan pelacakan radar tiga dimensi yang diperoleh pada persamaan (2.13) dengan hanya mengambil matriks A nya, yaitu : ẋ = cos θcos φ r sin θcos φ r cosθsin φ (4.1) ẏ = sin θcos φ + r cos θcos φ r sin θsin φ (4.2) ż = sin φ + r cos φ (4.3) Karena yang diestimasi perubahan posisi dan kecepatan terhadap waktu yang akan datang maka juga didapatkan : V x = 2sin θcos φ 2cos θsin φ 2sin θcos φ 2r cos θcos φ + 2r sin θsin φ (4.4)
57 37 V y = 2 cosθcos φ 2sin θsin φ + 2cos θcos φ 2rsin θcos φ 2rcos θsin φ (4.5) V z = 2cos φ rsin φ (4.6) dengan kata lain, Persamaan (4.1) (4.6) dapat dimisalkan sebagai Persamaan (4.7) (4.12) berikut dengan mentransformasikan menjadi koordinat kartesian untuk setiap elemennya. f 1 = x x2 + y 2 + z y xz 2 x2 + y 2 (4.7) f 2 = f 3 = f 4 = y x2 + y 2 + z + x yz (4.8) 2 x2 + y 2 z x2 + y 2 + z 2 + x 2 + y 2 (4.9) 2y x2 + y 2 + z 2xz 2 x2 + y 2 + z 2 x 2 + y 2x 2 + 2yz x2 + y 2 (4.10) f 5 = 2x x2 + y 2 + z 2yz 2 x2 + y 2 + z 2 x 2 + y 2y 2 2xz (4.11) x2 + y 2 f 6 = 2 x 2 + y 2 x2 + y 2 + z 2 z (4.12) Dari Persamaan (4.7) (4.12) diperoleh persamaan ruang keadaan waktu kontinu yaitu ẋ 1 r z s ẏ 1 1 r z s x ż 1 V x 0 0 r + s z y = 2 2z 2 2y V y rs r s z 2 V z r 2 2z 2x rs s V x 2s 0 0 zr V y V z
58 38 dengan dan keluarannya adalah r = x 2 + y 2 + z 2 s = x 2 + y 2 Z = h(x) r = θ φ x 2 + y 2 + z 2 = tan 1 ( y x ) tan 1 z ( ) x 2 +y 2 di mana x : Posisi target pada sumbu x y : Posisi target pada sumbu y z : Posisi target pada sumbu z V x : Kecepatan target pada sumbu x V y : Kecepatan target pada sumbu y V z : Kecepatan target pada sumbu z r : Jarak pelacak ke target θ : Sudut putar antara sumbu x dan y φ : Sudut elevasi antara sumbu x, y dan z Diskritisasi Persamaan pelacakan radar tiga dimensi tersebut merupakan model sistem dinamik deterministik waktu kontinu. Persamaan pelacakan radar tiga dimensi tersbut diubah menjadi bentuk model sistem dinamik waktu diskrit. Berdasarkan persamaan (4.7) (4.12) untuk memperoleh sistem Persamaan waktu diskrit dapat menggunakan metode
59 39 beda hingga maju yang sudah dijelaskan pada Bab II sehingga persamaan (4.7) (4.12) menjadi x k+1 x k t y k+1 y k t z k+1 z k t Vk+1 x V k x t V y+1 k t V y k = = = = = x k x 2 k + y2 k + z2 k y k x 2 k + y2 k + z2 k z k x 2 k + y2 k + z2 k 2y k x 2 k + y2 k + z2 k 2x k + 2y kz k x 2 k + y2 k 2x k x 2 k + y2 k + z2 k y k x kz k x 2 k + y2 k + x k y kz k + x 2 k + y2 k x 2 k + y2 k 2x k z k x 2 k + y2 k + k z2 x 2 + y 2 2y k z k x 2 k + y2 k + z2 k x 2 k + y2 k V z+1 k t V z k = 2y k 2x kz k x 2 k + y2 k 2 x 2 k + y2 k z k x 2 k + y2 k + z2 k (4.13)
60 40 Persamaan (4.13) dioperasikan sehingga menjadi x k+1 = tx k ty k tx kz k + x k x 2 k + y2 k + z2 k x 2 k + y2 k y k+1 = z k+1 = ty k x 2 k + y2 k + z2 k tz k x 2 k + y2 k + z2 k + tx k ty kz k x 2 k + y2 k + t x 2 k + y2 k + z k + y k V x k+1 = 2 ty k x 2 k + y2 k + z2 k 2 tx k z k x 2 k + y2 k + z2 k x 2 k + y2 k 2 tx k + 2 ty kz k x 2 + y + V x 2 k V y k+1 = 2 tx k x 2 k + y2 k + z2 k 2 ty k z k x 2 k + y2 k + z2 k x 2 k + y2 k 2 ty k V z 2 tx kz k x 2 + y + V y 2 k k+1 = 2 t x 2 k + y2 k x 2 k + y2 k + z2 k tz k + V z k (4.14)
61 41 Persamaan (4.14) merupakan model dinamis pelacakan radar tiga dimensi waktu diskrit. Sehingga sistem model dapat disajikan dalam bentuk Persamaan ruang keadaan (state space) yaitu x k+1 y k+1 z k+1 Vk+1 x V y k+1 Vk+1 z t r k + 1 t tx k s k t t r k + 1 ty k s k ts k t x k 0 r k = 2 t 2 tz k 2 t 2 ty k r k s k r k s k t r k 2 t 2 tz k r k s k 2 tx k s k ts k x k r k 0 t x k y k z k Vk x V y k Vk z dengan r k = s k = x 2 k + y2 k + z2 k x 2 k + y2 k dan keluarannya adalah Z k = h(x k ) = = r k θ k φ k x 2 k + y2 k + z2 k tan 1 ( y k x k ) tan 1 z ( k ) x 2 k +yk 2
62 Pembentukan Sistem Diskrit Stokastik Model dinamis pelacakan radar tiga dmensi pada (4.14) merupakan sistem deterministik. Model tersebut mengabaikan adanya noise atau gangguan. Noise-noise tersebut dapat terjadi pada model sistem seperti kesalahan dalam memodelkan dan juga noise dapat terjadi pada model pengukuran. Walaupun noise berukuran sangat kecil namun perlu diperhitungkan adanya suatu noise. Persamaan pelacakan radar tiga dimensi dengan mempertimbangkan adanya suatu noise maka persamaan (4.14) menjadi x k+1 = y k+1 = z k+1 = V x k+1 = tx k ty k tx kz k + x k + w 1k x 2 k + y2 k + z2 k x 2 k + y2 k ty k x 2 k + y2 k + z2 k tz k x 2 k + y2 k + z2 k 2 ty k x 2 k + y2 k + z2 k + tx k ty kz k x 2 k + y2 k + y k + w 2k + t x 2 k + y2 k + z k + w 3k 2 tx k z k x 2 k + y2 k + z2 k x 2 k + y2 k 2 tx k + 2 ty kz k x 2 + y + V x 2 k + w 4k V y k+1 = 2 tx k x 2 k + y2 k + z2 k 2 ty k z k x 2 k + y2 k + z2 k x 2 k + y2 k 2 ty k V z 2 tx kz k x 2 + y + V y 2 k + w 5k k+1 = 2 t x 2 k + y2 k x 2 k + y2 k + z2 k tz k + V z k + w 6k (4.15)
63 43 Menyesuaikan dengan bentuk persamaan ruang keadaan dari sistem dinamik stokastik diskrit dalam algoritma Extended Kalman Filter yaitu : X k+1 = A k X k + B k u k + G k w k Z k = h k (X k ) + v k Sehingga dari Persamaan (4.15) ruang keadaan menjadi : x k+1 y k+1 z k+1 Vk+1 x V y k+1 Vk+1 z t r k + 1 t tx k s k t t r k + 1 ty k s k ts k t x k 0 r k = 2 t 2 tz k 2 t 2 ty k r k s k r k s k t r k 2 t 2 tz k r k s k 2 tx k s k ts k x k r k 0 t x k y k z k Vk x V y k Vk z w 1k w 2k w 3k w 4k w 5k w 6k dengan r k = s k = x 2 k + y2 k + z2 k x 2 k + y2 k
64 44 dan keluarannya adalah Z k = h(x k ) + v k = = r k θ k φ k + v 1k v 2k v 3k x 2 k + y2 k + z2 k tan 1 ( y k x k ) + tan 1 z ( k ) x 2 k +yk 2 v 1k v 2k v 3k Sehingga diperoleh t r k + 1 t tx k s k t t r k + 1 ty k s k ts k t x k 0 r k A = 2 t 2 tz k 2 t 2 ty k r k s k r k s k t r k 2 t 2 tz k r k s k 2 tx k s k ts k x k r k 0 t dengan r k = s k = x 2 k + y2 k + z2 k x 2 k + y2 k G =
65 Implementasi Extended Kalman Filter Langkah awal dari algoritma Extended Kalman Filter membutuhkan nilai awal dari variabel-variabel dalam pelacakan radar tiga dimensi. Di mana variabelnya meliputi posisi searah sumbu x(x), posisi searah sumbu y(y), posisi searah sumbu z(z), kecepatan searah sumbu x(ẋ), kecepatan searah sumbu y(ẏ), kecepatan searah sumbu z(ż). Model sistemnya adalah dengan model pengukuran dengan asumsi X = [x, y, z, V x, V y, V z ] T X k+1 = f(x k, u k ) + w k Z k = h(x k+1 ) + v k X 0 N( X 0, P x0 ), w k N(0, Q k ), v k N(0, R k ) 1. Inisialisasi Untuk memulai implementasi dilakukan inisialisasi awal untuk estimasi awal ( ˆX 0 ) dan kovarian X, (P 0 ) yaitu ˆX 0 = X 0, P 0 = P X0 di mana X 0 = [x, y, z, V x, V y, V z ] T dan P X0 merupakan matriks diagonal dengan ukuran 6 x 6. P P P X0 = 0 0 P P P P 6
66 46 2. Tahap prediksi (time update) Pada tahap prediksi digunakan model sistem yang sudah dilinierkan melalui metode jacobian A = ( fi X j ( ˆX k, u k ) Metode Extended Kalman Filter membutuhkan sistem yang linier, maka dari itu terlebih dulu dilakukan pelinieran dengan metode Jacobian di mana metode ini untuk menentukan matriks A, sehingga diperoleh matriks Jacobian yaitu A = f 1 x k f 2 f 1 y k f 2 f 1 z k f 2 f 1 Vk x f 2 x k f 3 y k f 3 z k f 3 Vk x f 3 x k f 4 y k f 4 z k f 4 Vk x f 4 x k f 5 y k f 5 z k f 5 Vk x f 5 x k f 6 y k f 6 z k f 6 Vk x f 6 x k y k z k Vk x ) f 1 V y k f 2 V y k f 3 V y k f 4 V y k f 5 V y k f 6 V y k f 1 Vk z f 2 Vk z f 3 Vk z f 4 Vk z f 5 Vk z f 6 Vk z dengan f 1 sampai f 6 seperti yang sudah dituliskan pada Persamaan (4.7) (4.12) T urunanf 1 f 1 x k = t(x 2 k + y2 k + z2 k ) 1/2 tx 2 k (x2 k + y2 k + z2 k ) 3/2 tz k (x 2 k + y2 k ) 1/2 + tx 2 k z k(x 2 k + y2 k ) 3/2 + 1 f 1 y k = tx k y k (x 2 k + y2 k + z2 k ) 3/2 t + tx k y k z k (x 2 k + y2 k ) 3/2 f 1 z k = tx k z k (x 2 k + y2 k + z2 k ) 3/2 tx k (x 2 k + y2 k ) 1/2 f 1 Vk x = f 1 V y = f 1 k Vk z = 0
67 47 T urunanf 2 f 2 x k = tx k y k (x 2 k + y2 k + z2 k ) 3/2 + t + tx k y k z k (x 2 k + y2 k ) 3/2 f 2 y k = t(x 2 k + y2 k + z2 k ) 1/2 tyk 2 (x2 k + y2 k + z2 k ) 3/2 tz k (x 2 k + y2 k ) 1/2 + tyk 2 z k(x 2 k + y2 k ) 3/2 + 1 f 2 z k = ty k z k (x 2 k + y2 k + z2 k ) 3/2 ty k (x 2 k + y2 k ) 1/2 f 2 Vk x = f 2 V y = f 2 k Vk z = 0 T urunanf 3 f 2 x k = tx k z k (x 2 k + y2 k + z2 k ) 3/2 + tx k (x 2 k + y2 k ) 1/2 f 3 y k = ty k z k (x 2 k + y2 k + z2 k ) 3/2 + ty k (x 2 k + y2 k ) 1/2 f 3 z k = t(x 2 k + y2 k + z2 k ) 1/2 tzk 2 (x2 k + y2 k ) 3/2 f 3 V x k = f 3 V y k = f 3 V z k = 0 T urunanf 4 f 4 x k = 2 t 2 x k y k (x 2 k + y2 k + z2 k ) 3/2 2 t 2 z k (x 2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 1/2 + 2 t 2 x 2 k z k(x 2 k + y2 k ) 3/2 (x 2 k + y2 k + z2 k ) 1/2 + 2 t 2 x 2 k z k(x 2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 3/2 2 t 2 2 t 2 x k y k z k (x 2 k + y2 k ) 3/2
68 48 f 4 y k = 2 t 2 (x 2 k + y2 k + z2 k ) 1/2 + 2 t 2 y 2 k (x2 k + y2 k ) 3/2 +2 t 2 x k y k z k (x 2 k + y2 k ) 3/2 (x 2 k + y2 k + z2 k ) 1/2 +2 t 2 x k y k z k (x 2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 3/2 +2 t 2 z k (x 2 k + y2 k ) 1/2 2 t 2 x k y k z k (x 2 k + y2 k ) 3/2 f 4 z k = 2 t 2 y k z k (x 2 k + y2 k + z2 k ) 3/2 2 t 2 x k (x 2 k + y2 k ) 1/2 f 4 V x k f 4 V y k = 1 (x 2 k + y2 k + z2 k ) 1/2 + 2 t 2 x k z 2 k (x2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 3/2 + 2 t 2 y 2 k (x2 k + y2 k ) 1/2 = f 4 V z k = 0 T urunanf 5 f 5 x k = 2 t 2 (x 2 k + y2 k + z2 k ) 1/2 2 t 2 x 2 k (x2 k + y2 k ) 3/2 +2 t 2 x k y k z k (x 2 k + y2 k ) 3/2 (x 2 k + y2 k + z2 k ) 1/2 +2 t 2 x k y k z k (x 2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 3/2 2 t 2 zk 2 (x2 k + y2 k ) 1/2 + 2 t 2 x 2 k z k(x 2 k + y2 k ) 3/2 f 5 y k = 2 t 2 x k y k (x 2 k + y2 k + z2 k ) 3/2 2 t 2 zk 2 (x2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 1/2 + 2 t 2 y 2 k z k(x 2 k + y2 k ) 3/2 (x 2 k + y2 k + z2 k ) 1/2 + 2 t 2 y 2 k z k(x 2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 3/2 2 t t 2 x k y k z k (x 2 k + y2 k ) 3/2 f 5 z k = 2 t 2 x k z k (x 2 k + y2 k + z2 k ) 3/2 2 t 2 yk 2 (x2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 1/2 + 2 t 2 y k z 2 k (x2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 3/2 2 t 2 x k (x 2 k + y2 k ) 1/2
69 49 f 5 V x k f 5 V y k = f 5 V z k = 1 = 0 T urunanf 6 f 6 x k = 2 t 2 x k (x 2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 1/2 2 t 2 x k (x 2 k + y2 k )1/2 (x 2 k + y2 k + z2 k ) 3/2 f 6 y k = 2 t 2 y k (x 2 k + y2 k ) 1/2 (x 2 k + y2 k + z2 k ) 1/2 2 t 2 y k (x 2 k + y2 k )1/2 (x 2 k + y2 k + z2 k ) 3/2 f 6 z k = 2 t 2 (x 2 k + y2 k )1/2 z k (x 2 k + y2 k + z2 k ) 3/2 t 2 f 6 Vk x = f 6 V y k = 0 f 6 Vk z = 1 Lalu dihitung Kovarian Error dan estimasi yaitu Kovarian Error : P k+1 = AP k + P k A T + G k Q k G T k Estimasi : ˆX k = f( ˆX k, u k ) di mana kovarian dari noise sistem Q k merupakan matriks diagonal dengan ukuran 6 x 6 Q Q Q k = 0 0 Q Q Q Q 6
70 50 3. Tahap koreksi (measurement update) Pada tahap koreksi dihitung kalman gain, kovarian error dan estimasi melalui model pengukuran yaitu Kalman Gain : K k+1 = P k+1 HT k+1(h k+1 P k+1 H T k+1 + R k+1 ) 1 Kovarian Error : P k+1 = (I K k+1 H k+1 )P k+1 Estimasi : ˆXk+1 = ˆX k+1 + K k+1(z k+1 h( ˆX k+1 )) di mana Z k merupakan data pengukuran yang bersifat random. Data yang diukur yaitu posisi variabel x, y, dan z. Kovarian dari noise pengukuran R k merupakan matriks diagonal dengan ukuran 3 x 3 R R k = 0 R R 3 dan dengan matriks h yang akan dilinerkan, sebagai berikut : (x 2 k + y2 k + z2 k ) 1 2 h(x k ) = tan 1 ( y k x k ) tan 1 z ( k ) (x 2 k +y2 k ) 1 2 Seperti yang sudah dijelaskan di Bab II, bahwa dilakukan pelinieran terhadap matriks h menggunakan Jacobian : [ ] hi H = [H i,j ] = (Xk+1 X ) j Sehingga matriks H menjadi H = x k x 2 k +yk 2+z2 k y k x k x 2 k +yk 2+z2 k x k z k x 2 k +yk 2(x2 k +y2 k +z2 k ) y k x 2 k +yk 2+z2 k x k x 2 k +y2 k y k z k x 2 k +yk 2(x2 k +y2 k +z2 k ) z k x 2 k +yk 2+z2 k x 2 k +y 2 k x 2 k +y2 k +z2 k
71 51 Setelah melewati tahap koreksi, kembali lagi ke tahap prediksi dengan waktu selanjutnya dan berulang terus menerus sesuai iterasi yang dilakukan. 4.3 Implementasi Modifikasi Extended Kalman Filter Tidak jauh berbeda dengan metode Extended Kalman Filter dalam hal tahap prediksi yaitu langkah awal dari algoritma Extended Kalman Filter membutuhkan nilai awal dari variabel-variabel dalam pelacakan radar tiga dimensi. Di mana variabelnya meliputi posisi searah sumbu x(x), posisi searah sumbu y(y), posisi searah sumbu z(z), kecepatan searah sumbu x(ẋ), kecepatan searah sumbu y(ẏ), kecepatan searah sumbu z(ż). Model sistemnya adalah X = [x, y, z, V x k, V y k, V z k ]T dengan model pengukuran X k+1 = f(x k, u k ) + w k dengan asumsi Z k = h(x k+1 ) + v k X 0 N( X 0, P X0 ), w k N(0, Q k ), v k N(0, R k ) 1. Inisialisasi Untuk memulai implementasi dilakukan inisialisasi awal untuk estimasi awal ( ˆX 0 ) dan kovarian X, (P 0 ) yaitu ˆX 0 = X 0, P 0 = P X0
72 52 di mana X 0 = [x, y, z, Vk x, V y k, V k z]t dan P X0 merupakan matriks diagonal dengan ukuran 6 x 6. P P P X0 = 0 0 P P P P 6 2. Tahap prediksi (time update) Pada tahap prediksi digunakan model sistem yang sudah dilinierkan pada sub bab sebelumnya melalui metode jacobian ( ) fi A = x j ( ˆx k, u k ) dihitung Kovarian Error dan estimasi yaitu Kovarian Error : P k+1 = AP k + P k A T + G k Q k G T k Estimasi : ˆX k = f( ˆX k, u k ) di mana kovarian dari noise sistem Q k matriks diagonal dengan ukuran 6 x 6 Q Q Q k = 0 0 Q Q Q Q 6 merupakan Tetapi untuk tahap koreksi mengalami sedikit modifikasi sebagai berikut:
73 53 3. Tahap koreksi (measurement update) Pada tahap koreksi dihitung kalman gain, kovarian error dan estimasi melalui model pengukuran yaitu Kalman Gain : K k+1 = P k+1 HT k+1(h k+1 P k+1 H T k+1 + R p k+1 ) 1 Kovarian Error : P k+1 = (I K k+1 H k+1 )P k+1 Estimasi : ˆXk+1 = ˆX k+1 + K k+1(z k+1 h( ˆX k+1 ) µp k+1 ) di mana Z k merupakan data pengukuran yang bersifat random. Data yang diukur yaitu posisi variabel x, y, dan z. Kovarian dari noise pengukuran R p k+1 merupakan matriks diagonal dengan ukuran 3 x 3 dengan σ R p k r 2 + r2 k (σ4 θ +σ4 φ ) σθ σφ 2 r k2 [( θ k ) 2 + ( φ k ) 2 σ µ p k θ 2 σ2 φ ] 0 0 di mana r = r k r k, θ k = θ k θ k dan φ k = φ k φ k, serta σ adalah gangguan sudut untuk setiap pengukuran. Dengan matriks h yang dilinerkan, sebagai berikut : (x 2 k + y2 k + z2 k ) 1 2 h(x k ) = tan 1 ( y k x k ) tan 1 z ( k ) (x 2 k +y2 k ) 1 2 Seperti yang sudah dijelaskan di Bab II, bahwa dilakukan pelinieran terhadap matriks h(x k ) menggunakan metode Jacobian, sehingga matriks
74 54 H menjadi H = x k x 2 k +yk 2+z2 k y k x k x 2 k +yk 2+z2 k x k z k x 2 k +yk 2(x2 k +y2 k +z2 k ) y k x 2 k +yk 2+z2 k x k x 2 k +y2 k y k z k x 2 k +yk 2(x2 k +y2 k +z2 k ) z k x 2 k +yk 2+z2 k x 2 k +y 2 k x 2 k +y2 k +z2 k Setelah melewati tahap koreksi, kembali lagi ke tahap prediksi dengan waktu ke-k+1 dan berulang terus menerus sesuai langkah yang diberikan. 4.4 Simulasi Extended Kalman Filter dan Modifikasi Extended Kalman Filter Pada subbab ini simulasi dilakukan dengan menerapkan algoritma Extended Kalman Filter dan modifikasinya yang diterapkan secara langsung pada model dinamis pelacakan radar tiga dimensi dengan kasus yang diusulkan. Hasil simulasi akan dievaluasi dengan cara membandingkan nilai real dengan hasil estimasi Extended Kalman Filter (EKF) dan modifikasi Extended Kalman Filter (MEKF) serta diakhir simulasi ditampilkan nilai RMSE (Root Mean Square Error) dari masing-masing variabel. Dalam simulasi ini, nilai awal dan parameter yang digunakan adalah Tabel 4.1: Nilai awal dari masing-masing variabel Saat waktu t = 0 Nilai awal x 15 m y 12 m z 5 m V x -60 m/s V y -70 m/s V z -40 m/s
75 55 Tabel 4.2: Nilai Parameter Parameter Nilai σ r m σ θ rad/s σ φ rad/s P Q k R k dt Simulasi pada kedua kasus yang akan dilakukan menggunakan kondisi awal seperti pada tabel. Pada simulasi ini dilakukan running sebanyak 100 kali sesuai jumlah langkah. Hasil simulasi dan nilai RMSE (Root Mean Square Error) dengan mengambil parameter dan nilai awal berdasarkan yang terdapat pada Tabel 4.1 dan Tabel 4.2 didapatkan grafik dengan waktu komputasi sebesar detik sebagai berikut: Simulasi 1 Simulasi pada percobaan pertama dengan diberikan kondisi awal serta parameter seperti di atas dan dengan matriks h yang dipilih yaitu (x 2 k + y2 k + z2 k ) 1 2 h(x k ) = tan 1 ( y k x k ) tan 1 z ( k (x 2 k +y2 k ) 1 2 yang menggambarkan bahwa data pengukuran digunakan adalah variabel r, θ, dan φ.


76 56 Gambar 4.1: Grafik Perbandingan Nilai Real dan Estimasi Posisi Variabel x Pada gambar 4.1, warna hijau pada grafik di atas menunjukkan nilai real, warna biru menunjukkan nilai estimasi EKF dan warna merah menunjukkan nilai hasil estimasi MEKF. Hasil yang diperoleh menunjukkan selisih nilai antara nilai real dengan nilai hasil estimasi EKF sebesar , dan selisih nilai antara nilai real dengan nilai hasil estimasi MEKF sebesar Gambar 4.2: Grafik Perbandingan Nilai Real dan Estimasi Posisi Variabel y

77 57 Pada gambar 4.2, warna hijau pada grafik di atas menunjukkan nilai real, warna biru menunjukkan nilai estimasi EKF dan warna merah menunjukkan nilai hasil estimasi MEKF. Hasil yang diperoleh menunjukkan selisih nilai antara nilai real dengan nilai hasil estimasi EKF sebesar , dan selisih nilai antara nilai real dengan nilai hasil estimasi MEKF sebesar Gambar 4.3: Grafik Perbandingan Nilai Real dan Estimasi Posisi Variabel z Pada gambar 4.3, warna hijau pada grafik di atas menunjukkan nilai real, warna biru menunjukkan nilai estimasi EKF dan warna merah menunjukkan nilai hasil estimasi MEKF. Hasil yang diperoleh menunjukkan selisih nilai antara nilai real dengan nilai hasil estimasi EKF sebesar , dan selisih nilai antara nilai real dengan nilai hasil estimasi MEKF sebesar


78 58 Gambar 4.4: Grafik Perbandingan Nilai Real dan Estimasi Kecepatan Variabel x Pada gambar 4.4, warna hijau pada grafik di atas menunjukkan nilai real, warna biru menunjukkan nilai estimasi EKF dan warna merah menunjukkan nilai hasil estimasi MEKF. Hasil yang diperoleh menunjukkan selisih nilai antara nilai real dengan nilai hasil estimasi EKF sebesar , dan selisih nilai antara nilai real dengan nilai hasil estimasi MEKF sebesar Gambar 4.5: Grafik Perbandingan Nilai Real dan Estimasi Kecepatan Variabel y

79 59 Pada gambar 4.5, warna hijau pada grafik di atas menunjukkan nilai real, warna biru menunjukkan nilai estimasi EKF dan warna merah menunjukkan nilai hasil estimasi MEKF. Hasil yang diperoleh menunjukkan selisih nilai antara nilai real dengan nilai hasil estimasi EKF sebesar , dan selisih nilai antara nilai real dengan nilai hasil estimasi MEKF sebesar Gambar 4.6: Grafik Perbandingan Nilai Real dan Estimasi Kecepatan Variabel z Pada gambar 4.6, warna hijau pada grafik di atas menunjukkan nilai real, warna biru menunjukkan nilai estimasi EKF dan warna merah menunjukkan nilai hasil estimasi MEKF. Hasil yang diperoleh menunjukkan selisih nilai antara nilai real dengan nilai hasil estimasi EKF sebesar , dan selisih nilai antara nilai real dengan nilai hasil estimasi MEKF sebesar

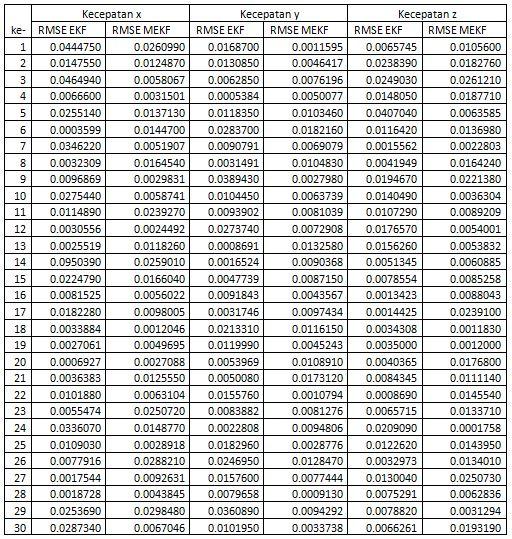
80 60 Gambar 4.7: Grafik Error antara Nilai Real dan Estimasi dari Semua Variabel Pada Gambar 4.7 menunjukkan grafik dari error antara nilai real dan nilai hasil estimasi dari semua variabel. Terlihat bahwa nilai error yang paling kecil pada nilai hasil estimasi modifikasi Extended Kalman Filter di setiap variabel dengan ditunjukkan dari nilai RMSE masing-masing variabel. Dilihat dari grafik, nilai RMSE yang paling kecil terjadi pada variabel posisi x, y dan z tetapi lain halnya dengan yang ditunjukkan oleh variabel kecepatan dari x, y dan z di mana hasil estimasinya terlihat kurang konsisten. Pada gambar menunjukkan bahwa grafik dari hasil estimasi variabel posisi lebih mendekati nilai realnya dibandingkan dengan estimasi variabel yang lain. Hal ini dikarenakan dari matriks h yang dipilih menggambarkan bahwa data pengukuran yang digunakan adalah variabel tersebut.
81 61 Tabel 4.3: Nilai rata-rata RMSE setiap variabel Pada tabel 4.3 terlihat bahwa nilai RMSE dari setiap variabel relatif kecil yaitu nilai error (ne) pada interval < ne < atau dapat dikatakan kesalahannya sebesar 0.77% hingga 1.15% untuk modifikasi Extended Kalman Filter dan < ne < atau dapat dikatakan kesalahannya sebesar 0.94% hingga 1.82% untuk Extended Kalman Filter. Sehingga secara keseluruhan hal ini dapat dikatakan bahwa metode Modifikasi Extended Kalman Filter cocok untuk mengestimasi sistem pelacakan radar tiga dimensi dalam hal ini khusus unuk pengukuran yang tidak linier.


82 Simulasi 2 Pada percobaan ini dilakukan simulasi dengan kondisi awal dan parameter seperti pada subbab 4.1 dan dengan data pengukuran yang dimiliki adalah variabel x, y dan z. Tujuan dari simulasi ini adalah agar mengetahui lintasan yang terjadi dengan kondisi awal yang diberikan dalam 100 langkah yang dilakukan pada setiap variabel. Gambar 4.8: Grafik lintasan yang terjadi dengan nilai awal pada Nilai Real selama 100 langkah Gambar 4.9: Grafik lintasan yang terjadi dengan nilai awal oleh Metode Extended Kalman Filter selama 100 langkah
 menjadi (15.293, 11.288, 4.591) untuk nilai Real yang terjadi. Pada gambar 4.")
83 63 Gambar 4.10: Grafik lintasan yang terjadi dengan nilai awal oleh modifikasi Extended Kalman Filter selama 100 langkah Pada gambar 4.8, terjadi perubahan posisi yang sudah diberikan dengan nilai awal (15,12,10) menjadi (15.293, , 4.591) untuk nilai Real yang terjadi. Pada gambar 4.9 untuk Metode Extended Kalman Filter, dengan nilai awal yang diberikan berubah posisinya menjadi (15.311, , 4.553). Pada gambar 4.10 untuk modifikasi Extended Kalman Filter, dengan nilai awal yang diberikan berubah posisinya menjadi (15.291, , 4.374).
84
85 BAB V PENUTUP Pada bab ini, diberikan kesimpulan yang diperoleh dari penelitian serta saran untuk penelitian selanjutnya. 5.1 Kesimpulan Berdasarkan analisis dan pembahasan yang telah disajikan pada bab sebelumnya, dapat disimpulkan beberapa hal sebagai berikut : 1. Model dinamis pelacakan radar tiga dimensi yang diperoleh adalah sebagai berikut: ẋ = ẏ = ż = V x = x x2 + y 2 + z y xz 2 x2 + y 2 y x2 + y 2 + z + x yz 2 x2 + y 2 z x2 + y 2 + z 2 + x 2 + y 2 2y x2 + y 2 + z 2xz 2 x2 + y 2 + z 2 x 2 + y 2x 2 + 2yz x2 + y 2 V y = 2x x2 + y 2 + z 2yz 2 x2 + y 2 + z 2 x 2 + y 2y 2 2xz x2 + y 2 V z = 2 x 2 + y 2 x2 + y 2 + z 2 z 65
86 66 2. Hasil estimasi menunjukkan bahwa setiap variabel (posisi dan kecepatan x, y, dan z) dari pelacakan radar tiga dimensi oleh Modifikasi EKF lebih baik daripada metode EKF dengan ditunjukkan dengan tingkat kesalahannya hanya sebesar 0.77% hingga 1.15% untuk Modifikasi EKF, sedangkan tingkat kesalahan dari EKF adalah sebesar 0.94% hingga 1.82% 3. Berdasarkan waktu komputasi menunjukkan bahwa gabungan metode EKF dan modifikasinya memerlukan waktu detik. 5.2 Saran Pada Tugas Akhir ini, model dinamis pelacakan radar tiga dimensi merupakan sistem dengan pengukuran yang tak linier. Oleh karena itu, modifikasi EKF juga bisa digunakan untuk sistem tak linier dengan pengukuran tak linier lainnya.
87 DAFTAR PUSTAKA [1] Park, S.T., Lee, J.G. (2001). Improved Kalman Filter Design for Three-Dimensional Radar Tracking. IEEE Transactions on Aerospace and Electronic Systems Vol.37. No.2. [2] Sani, R.A. (2012). Estimasi Variabel Gerak Pesawat Terbang menggunakan Metode Fuzzy Kalman Filter. Surabaya: Program Sarjana ITS Surabaya. [3] S. Aishaa, P. Keerthana. (2015). Extended Kalman Filter Modelling for Tracking Radar with Missing Measurements. International Journal of Innovative Research in Science, Engineering and Technology. Vol. 4, Issue 9. [4] Fahmedha, N., Prakash P. C., dkk. (2015).Estimation of System Parameters Using Kalman Filter and Extended Kalman Filter. International Journal of Advanced Technology and Engneering Exploration, Vol. 2, Issue 6, ISSN: [5] Leskiw, Donald. (2011). The Extended Preferred Ordering Theorem for Radar Tracking Using the Extended Kalman Filter. New York: Syracuse University. [6] Kleeman, Lindsay. (2007). Understanding and Applying Kalman Filtering. Clayton: Monash University. 67
88 68 [7] Lewis, F. L. (1998). Optimal Estimation with An Introduction to Stochastic Control Theory. Georgia: School of Electrical Engineering Georgia Institute of Technology Atlanta. [8] Welch, G.,Bishop, G.(2006). An Introduction to The Kalman Filter. Chapel Hill: University of North Carolina. [9] Ermayanti, Z., Apriliani, E., Nurhadi, H., Herlambang, T. (2015). Estimate and Control Position Autonomous Underwater Vehicle based on Determined Trajectory using Fuzzy Kalman Filter Method. IEEE. [10] Apriliani, E., Subchan., Yunaini, F., Hartini, S.Estimation and Control Design of Mobile Robot Position. Far East Journal of Mathematical Sciences (FJMS) Vol.77, Issue 1.

89 LAMPIRAN A Data Nilai RMSE Setiap Variabel 69
90 70
91 71
92 72
93 73
94 74

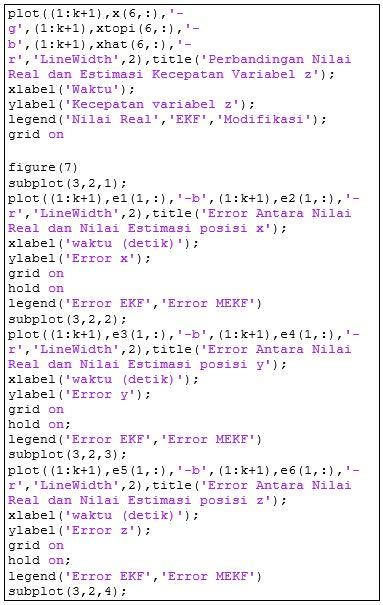
95 LAMPIRAN B Source Code 75
96 76
97 77
98 78
99 79
100 80
101 81
102 82
103 83
104 84
105 85
106 86
107 87
108
, SDK St. Paulus (2001-2007), SMP Negeri 1 Bojonegoro (2007-2010), dan SMA Negeri 1 Bojonegoro (2010-2013).")
109 LAMPIRAN C Biodata Penulis Penulis bernama Prima Aditya, lahir di Bojonegoro, 18 Desember Penulis merupakan anak kedua dari dua bersaudara. Penulis menempuh pendidikan formal dimulai dari TKK St. Paulus ( ), SDK St. Paulus ( ), SMP Negeri 1 Bojonegoro ( ), dan SMA Negeri 1 Bojonegoro ( ). Setelah lulus dari SMA, pada tahun 2013 penulis melanjutkan studi ke jenjang S1 di Jurusan Matematika ITS Surabaya melalui jalur SBMPTN dengan NRP Di Jurusan Matematika, penulis mengambil Bidang Minat Matematika Terapan. Informasi lebih lanjut mengenai Tugas Akhir ini dapat ditujukan ke penulis melalui paulusprima32@gmail.com
Perbandingan Metode Kalman Filter, Extended Kalman Filter, dan Ensemble Kalman Filter pada Model Penyebaran Virus HIV/AIDS
 J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 15, No. 1, Maret 2018, 17-29 Perbandingan Metode Kalman Filter, Extended Kalman Filter, dan Ensemble Kalman Filter pada Model Penyebaran
J. Math. and Its Appl. E-ISSN: 2579-8936 P-ISSN: 1829-605X Vol. 15, No. 1, Maret 2018, 17-29 Perbandingan Metode Kalman Filter, Extended Kalman Filter, dan Ensemble Kalman Filter pada Model Penyebaran
ESTIMASI POSISI ROBOT MOBIL MENGGUNAKAN UNSCENTED KALMAN FILTER. Oleh: Miftahuddin ( )
") ESTIMASI POSISI ROBOT MOBIL MENGGUNAKAN UNSCENTED KALMAN FILTER Oleh: Miftahuddin (1206 100 707) Dosen Pembimbing: Subchan, Ph.D Dr. Erna Apriliani, M.Si Abstrak Robot Mobil atau Mobile Robot adalah konstruksi
ESTIMASI POSISI ROBOT MOBIL MENGGUNAKAN UNSCENTED KALMAN FILTER Oleh: Miftahuddin (1206 100 707) Dosen Pembimbing: Subchan, Ph.D Dr. Erna Apriliani, M.Si Abstrak Robot Mobil atau Mobile Robot adalah konstruksi
SEMINAR TUGAS AKHIR. Penerapan Metode Ensemble Kalman Filter untuk Estimasi Kecepatan dan Ketinggian Gelombang Non Linear pada Pantai
 SEMINAR TUGAS AKHIR Penerapan Metode Ensemble Kalman Filter untuk Estimasi Kecepatan dan Ketinggian Gelombang Non Linear pada Pantai Oleh: Fadila Rahmana 1208 100 044 Abstrak Gelombang laut telah menjadi
SEMINAR TUGAS AKHIR Penerapan Metode Ensemble Kalman Filter untuk Estimasi Kecepatan dan Ketinggian Gelombang Non Linear pada Pantai Oleh: Fadila Rahmana 1208 100 044 Abstrak Gelombang laut telah menjadi
Estimasi Solusi Model Pertumbuhan Logistik dengan Metode Ensemble Kalman Filter
 Jurnal ILMU DASAR, Vol.14, No,2, Juli 2013 : 85-90 85 Estimasi Solusi Model Pertumbuhan Logistik dengan Metode Ensemble Kalman Filter Solution Estimation of Logistic Growth Model with Ensemble Kalman Filter
Jurnal ILMU DASAR, Vol.14, No,2, Juli 2013 : 85-90 85 Estimasi Solusi Model Pertumbuhan Logistik dengan Metode Ensemble Kalman Filter Solution Estimation of Logistic Growth Model with Ensemble Kalman Filter
BAB III EXTENDED KALMAN FILTER DISKRIT. Extended Kalman Filter adalah perluasan dari Kalman Filter. Extended
 26 BAB III EXTENDED KALMAN FILTER DISKRIT 3.1 Pendahuluan Extended Kalman Filter adalah perluasan dari Kalman Filter. Extended Kalman Filter merupakan algoritma yang digunakan untuk mengestimasi variabel
26 BAB III EXTENDED KALMAN FILTER DISKRIT 3.1 Pendahuluan Extended Kalman Filter adalah perluasan dari Kalman Filter. Extended Kalman Filter merupakan algoritma yang digunakan untuk mengestimasi variabel
BAB IV PENGUJIAN ALGORITMA TRACKING
 BAB IV PENGUJIAN ALGORITMA TRACKING Pada Bab III sebelumnya telah dijelaskan mengenai pemodelan dalam Simulink yang dibuat untuk menguji algoritma Filter Kalman dalam sistem Radar Tracking dan juga algoritma
BAB IV PENGUJIAN ALGORITMA TRACKING Pada Bab III sebelumnya telah dijelaskan mengenai pemodelan dalam Simulink yang dibuat untuk menguji algoritma Filter Kalman dalam sistem Radar Tracking dan juga algoritma
Simulasi Estimasi Arah Kedatangan Dua Dimensi Sinyal menggunakan Metode Propagator dengan Dua Sensor Array Paralel
 ABSTRAK Simulasi Estimasi Arah Kedatangan Dua Dimensi Sinyal menggunakan Metode Propagator dengan Dua Sensor Array Paralel Disusun oleh : Enrico Lukiman (1122084) Jurusan Teknik Elektro, Fakultas Teknik,
ABSTRAK Simulasi Estimasi Arah Kedatangan Dua Dimensi Sinyal menggunakan Metode Propagator dengan Dua Sensor Array Paralel Disusun oleh : Enrico Lukiman (1122084) Jurusan Teknik Elektro, Fakultas Teknik,
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI BAB II LANDASAN TEORI 2.1. Sistem Kendali Lup[1] Sistem kendali dapat dikatakan sebagai hubungan antara komponen yang membentuk sebuah konfigurasi sistem, yang akan menghasilkan
BAB II LANDASAN TEORI BAB II LANDASAN TEORI 2.1. Sistem Kendali Lup[1] Sistem kendali dapat dikatakan sebagai hubungan antara komponen yang membentuk sebuah konfigurasi sistem, yang akan menghasilkan
Metode Asimilasi Data sebagai Estimasi Penyelesaian Masalah-masalah Lingkungan
 J. of Math. and Its Appl. ISSN: 1829-605X Vol. 1, No. 1 (2004), 19 Metode Asimilasi Data sebagai Estimasi Penyelesaian Masalah-masalah Lingkungan Erna Apriliani Jurusan Matematika Institut Teknologi Sepuluh
J. of Math. and Its Appl. ISSN: 1829-605X Vol. 1, No. 1 (2004), 19 Metode Asimilasi Data sebagai Estimasi Penyelesaian Masalah-masalah Lingkungan Erna Apriliani Jurusan Matematika Institut Teknologi Sepuluh
ALGORITMA ADAPTIVE COVARIANCE RANK UNSCENTED KALMAN FILTER UNTUK ESTIMASI KEADAAN PADA PERSAMAAN AIR DANGKAL
 ALGORITMA ADAPTIVE COVARIANCE RANK UNSCENTED KALMAN FILTER UNTUK ESTIMASI KEADAAN PADA PERSAMAAN AIR DANGKAL Habib Hasbullah 1, Erna Apriliani 2 1 Mahasiswa Program Studi S2, Jurusan Matematika, F-MIPA,
ALGORITMA ADAPTIVE COVARIANCE RANK UNSCENTED KALMAN FILTER UNTUK ESTIMASI KEADAAN PADA PERSAMAAN AIR DANGKAL Habib Hasbullah 1, Erna Apriliani 2 1 Mahasiswa Program Studi S2, Jurusan Matematika, F-MIPA,
Oleh: Dimas Avian Maulana Dosen Pembimbing: Subchan, Ph.D
 Oleh: Dimas Avian Maulana-1207100045 Dosen Pembimbing: Subchan, Ph.D Robot mobil adalah salah satu contoh dari wahana nir awak (WaNA) yang dapat dikendalikan dari jauh atau memiliki sistem pengendali otomatis
Oleh: Dimas Avian Maulana-1207100045 Dosen Pembimbing: Subchan, Ph.D Robot mobil adalah salah satu contoh dari wahana nir awak (WaNA) yang dapat dikendalikan dari jauh atau memiliki sistem pengendali otomatis
PERBANDINGAN HASIL PEMODELAN ARTIFICIAL NEURAL NETWORKS DAN KERNEL SMOOTHING PADA DATA REGRESI NON LINIER
 TUGAS AKHIR - ST 1325 PERBANDINGAN HASIL PEMODELAN ARTIFICIAL NEURAL NETWORKS DAN KERNEL SMOOTHING PADA DATA REGRESI NON LINIER ADITYA HIDAYAT JATI NRP 1302100044 Dosen Pembimbing Dra. Kartika Fitriasari,
TUGAS AKHIR - ST 1325 PERBANDINGAN HASIL PEMODELAN ARTIFICIAL NEURAL NETWORKS DAN KERNEL SMOOTHING PADA DATA REGRESI NON LINIER ADITYA HIDAYAT JATI NRP 1302100044 Dosen Pembimbing Dra. Kartika Fitriasari,
PADA. Oleh Ferryanto Chandra Program Studi Magister dan Doktor Teknik Penerbangan Fakultas Teknologi Industri Institut Teknologi Bandung
 APLIKASI ALGORITMA FILTERING PADA SISTEM MULTI RADAR TRACKING Oleh Ferryanto Chandra 23604004 Program Studi Magister dan Doktor Teknik Penerbangan Fakultas Teknologi Industri Institut Teknologi Bandung
APLIKASI ALGORITMA FILTERING PADA SISTEM MULTI RADAR TRACKING Oleh Ferryanto Chandra 23604004 Program Studi Magister dan Doktor Teknik Penerbangan Fakultas Teknologi Industri Institut Teknologi Bandung
Implementasi Ensemble Kalman Filter (Enkf) Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler
 Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler") Implementasi Ensemble Kalman Filter (Enkf) Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler Ahmad Nasrullah Jamaludin 1, Erna Apriliani 1, Hendra Cordova 2, Teguh Herlambang 3 1
Implementasi Ensemble Kalman Filter (Enkf) Untuk Estimasi Ketinggian Air Dan Temperatur Uap Pada Steam Drum Boiler Ahmad Nasrullah Jamaludin 1, Erna Apriliani 1, Hendra Cordova 2, Teguh Herlambang 3 1
ESTIMASI VARIABEL KEADAAN PADA NON- ISOTHERMAL CONTINUOUS STIRRED TANK REACTOR MENGGUNAKAN FUZZY KALMAN FILTER
 TESIS - SM 142501 ESTIMASI VARIABEL KEADAAN PADA NON- ISOTHERMAL CONTINUOUS STIRRED TANK REACTOR MENGGUNAKAN FUZZY KALMAN FILTER RISA FITRIA NRP 1211201202 DOSEN PEMBIMBING Dr. Didik Khusnul Arif, S.Si,
TESIS - SM 142501 ESTIMASI VARIABEL KEADAAN PADA NON- ISOTHERMAL CONTINUOUS STIRRED TANK REACTOR MENGGUNAKAN FUZZY KALMAN FILTER RISA FITRIA NRP 1211201202 DOSEN PEMBIMBING Dr. Didik Khusnul Arif, S.Si,
ESTIMASI LOKASI SUMBER JAMAK DALAM MEDAN DEKAT MENGGUNAKAN 3-D MULTIPLE SIGNAL CLASSIFICATION (MUSIC)
") ESTIMASI LOKASI SUMBER JAMAK DALAM MEDAN DEKAT MENGGUNAKAN 3-D MULTIPLE SIGNAL CLASSIFICATION (MUSIC) Disusun Oleh: Nama : Juke Ratna Puri Nrp : 0422085 Jurusan Teknik Elektro, Fakultas Teknik, Universitas
ESTIMASI LOKASI SUMBER JAMAK DALAM MEDAN DEKAT MENGGUNAKAN 3-D MULTIPLE SIGNAL CLASSIFICATION (MUSIC) Disusun Oleh: Nama : Juke Ratna Puri Nrp : 0422085 Jurusan Teknik Elektro, Fakultas Teknik, Universitas
IMPLEMENTASI ENSEMBLE KALMAN FILTER PADA ESTIMASI KECEPATAN KAPAL SELAM
 SIDANG TUGAS AKHIR IMPLEMENTASI ENSEMBLE KALMAN FILTER PADA ESTIMASI KEEPATAN KAPAL SELAM Oleh: RISA FITRIA 57 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
SIDANG TUGAS AKHIR IMPLEMENTASI ENSEMBLE KALMAN FILTER PADA ESTIMASI KEEPATAN KAPAL SELAM Oleh: RISA FITRIA 57 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH
TUGAS AKHIR. ESTIMASI POSISI MAGNETIC LEVITATION BALL MENGGUNAKAN METODE ENSEMBLE KALMAN FILTER (EnKF) Oleh: ARIEF RACHMAN
 Oleh: ARIEF RACHMAN") TUGAS AKHIR ESTIMASI POSISI MAGNETIC LEVITATION BALL MENGGUNAKAN METODE ENSEMBLE KALMAN FILTER (EnKF) Oleh: ARIEF RACHMAN 1206 100 710 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT
TUGAS AKHIR ESTIMASI POSISI MAGNETIC LEVITATION BALL MENGGUNAKAN METODE ENSEMBLE KALMAN FILTER (EnKF) Oleh: ARIEF RACHMAN 1206 100 710 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT
UNIVERSITAS BINA NUSANTARA SIMULASI KINEMATIKA LENGAN ROBOT INDUSTRI DENGAN 6 DERAJAT KEBEBASAN
 UNIVERSITAS BINA NUSANTARA Jurusan Sistem Komputer Skripsi Sarjana Komputer Semester Genap tahun 2003/2004 SIMULASI KINEMATIKA LENGAN ROBOT INDUSTRI DENGAN 6 DERAJAT KEBEBASAN Andy Rosady 0400530056 Riza
UNIVERSITAS BINA NUSANTARA Jurusan Sistem Komputer Skripsi Sarjana Komputer Semester Genap tahun 2003/2004 SIMULASI KINEMATIKA LENGAN ROBOT INDUSTRI DENGAN 6 DERAJAT KEBEBASAN Andy Rosady 0400530056 Riza
KAJIAN ESTIMASI PARAMETER MODEL AUTOREGRESIF TUGAS AKHIR SM 1330 NUR SHOFIANAH NRP
 TUGAS AKHIR SM 1330 KAJIAN ESTIMASI PARAMETER MODEL AUTOREGRESIF NUR SHOFIANAH NRP 1203 100 009 Dosen Pembimbing Dra. Laksmi Prita W, MSi Dra. Nuri Wahyuningsih, MKes JURUSAN MATEMATIKA Fakultas Matematika
TUGAS AKHIR SM 1330 KAJIAN ESTIMASI PARAMETER MODEL AUTOREGRESIF NUR SHOFIANAH NRP 1203 100 009 Dosen Pembimbing Dra. Laksmi Prita W, MSi Dra. Nuri Wahyuningsih, MKes JURUSAN MATEMATIKA Fakultas Matematika
BAB III KALMAN FILTER DISKRIT. Kalman Filter adalah rangkaian teknik perhitungan matematika (algoritma)
") BAB III KALMAN FILTER DISKRIT 3.1 Pendahuluan Kalman Filter adalah rangkaian teknik perhitungan matematika (algoritma) yang memberikan perhitungan efisien dalam mengestimasi state proses, yaitu dengan
BAB III KALMAN FILTER DISKRIT 3.1 Pendahuluan Kalman Filter adalah rangkaian teknik perhitungan matematika (algoritma) yang memberikan perhitungan efisien dalam mengestimasi state proses, yaitu dengan
BAB III METODE PENELITIAN. tracking obyek. Pada penelitian tugas akhir ini, terdapat obyek berupa bola. Gambar 3.1. Blok Diagram Penelitian
 BAB III METODE PENELITIAN 3.1 Metode Penelitian Metode penelitian yang digunakan dalam pengerjaan Tugas Akhir ini adalah studi literatur, pembuatan program serta melakukan deteksi dan tracking obyek. Pada
BAB III METODE PENELITIAN 3.1 Metode Penelitian Metode penelitian yang digunakan dalam pengerjaan Tugas Akhir ini adalah studi literatur, pembuatan program serta melakukan deteksi dan tracking obyek. Pada
IDENTIFIKASI DAN ESTIMASI VARIABEL KEADAAN DARI SISTEM TEREDUKSI DENGAN METODE PEMOTONGAN SETIMBANG PADA MODEL KONDUKSI PANAS
 TUGAS AKHIR - SM 141501 IDENTIFIKASI DAN ESTIMASI VARIABEL KEADAAN DARI SISTEM TEREDUKSI DENGAN METODE PEMOTONGAN SETIMBANG PADA MODEL KONDUKSI PANAS FELLA DIANDRA CHRISANDY NRP 1213 100 039 Dosen Pembimbing
TUGAS AKHIR - SM 141501 IDENTIFIKASI DAN ESTIMASI VARIABEL KEADAAN DARI SISTEM TEREDUKSI DENGAN METODE PEMOTONGAN SETIMBANG PADA MODEL KONDUKSI PANAS FELLA DIANDRA CHRISANDY NRP 1213 100 039 Dosen Pembimbing
Simulasi Pelacakan Target Tunggal Untuk Mengetahui Jarak, Sudut Azimuth, Sudut elevasi dan kecepatan target ABSTRAK
 Simulasi Pelacakan Target Tunggal Untuk Mengetahui Jarak, Sudut Azimuth, Sudut elevasi dan kecepatan target Willy Sukardi / 0322041 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha
Simulasi Pelacakan Target Tunggal Untuk Mengetahui Jarak, Sudut Azimuth, Sudut elevasi dan kecepatan target Willy Sukardi / 0322041 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha
Bab 3. Sistem Koordinat Ortogonal. 3.1 Sistem Koordinat Kartesian. cakul fi5080 by khbasar; sem
 Bab 3 cakul fi5080 by khbasar; sem1 2010-2011 Sistem Koordinat Ortogonal Sistem koordinat merupakan cara pandang terhadap suatu masalah. Penggunaan sistem koordinat yang berbeda dalam menyelesaikan suatu
Bab 3 cakul fi5080 by khbasar; sem1 2010-2011 Sistem Koordinat Ortogonal Sistem koordinat merupakan cara pandang terhadap suatu masalah. Penggunaan sistem koordinat yang berbeda dalam menyelesaikan suatu
PENYELESAIAN PERSAMAAN SCHRODINGER TIGA DIMENSI UNTUK POTENSIAL NON-SENTRAL ECKART DAN MANNING- ROSEN MENGGUNAKAN METODE ITERASI ASIMTOTIK
 PENYELESAIAN PERSAMAAN SCHRODINGER TIGA DIMENSI UNTUK POTENSIAL NON-SENTRAL ECKART DAN MANNING- ROSEN MENGGUNAKAN METODE ITERASI ASIMTOTIK Disusun oleh : Muhammad Nur Farizky M0212053 SKRIPSI PROGRAM STUDI
PENYELESAIAN PERSAMAAN SCHRODINGER TIGA DIMENSI UNTUK POTENSIAL NON-SENTRAL ECKART DAN MANNING- ROSEN MENGGUNAKAN METODE ITERASI ASIMTOTIK Disusun oleh : Muhammad Nur Farizky M0212053 SKRIPSI PROGRAM STUDI
Catatan Kuliah AK5161 Matematika Keuangan Aktuaria Insure and Invest! Dosen: Khreshna I.A. Syuhada, MSc. PhD.
 Catatan Kuliah AK5161 Matematika Keuangan Aktuaria Insure and Invest! Dosen: Khreshna I.A. Syuhada, MSc. PhD. Kelompok Keilmuan Statistika - FMIPA Institut Teknologi Bandung 2014 1 Tentang AK5161 Matematika
Catatan Kuliah AK5161 Matematika Keuangan Aktuaria Insure and Invest! Dosen: Khreshna I.A. Syuhada, MSc. PhD. Kelompok Keilmuan Statistika - FMIPA Institut Teknologi Bandung 2014 1 Tentang AK5161 Matematika
ESTIMASI PARAMETER MODEL MIXTURE AUTOREGRESSIVE (MAR) MENGGUNAKAN ALGORITMA EKSPEKTASI MAKSIMISASI (EM)
 MENGGUNAKAN ALGORITMA EKSPEKTASI MAKSIMISASI (EM)") ESTIMASI PARAMETER MODEL MIXTURE AUTOREGRESSIVE (MAR) MENGGUNAKAN ALGORITMA EKSPEKTASI MAKSIMISASI (EM) oleh MIKA ASRINI M0108094 SKRIPSI ditulis dan diajukan untuk memenuhi sebagian persyaratan memperoleh
ESTIMASI PARAMETER MODEL MIXTURE AUTOREGRESSIVE (MAR) MENGGUNAKAN ALGORITMA EKSPEKTASI MAKSIMISASI (EM) oleh MIKA ASRINI M0108094 SKRIPSI ditulis dan diajukan untuk memenuhi sebagian persyaratan memperoleh
ESTIMASI KETINGGIAN AIR DAN TEMPERATUR UAP PADA MODEL STEAM DRUM BOILER DENGAN METODE EXTENDED KALMAN FILTER SKRIPSI
 ESTIMASI KETINGGIAN AIR DAN TEMPERATUR UAP PADA MODEL STEAM DRUM BOILER DENGAN METODE EXTENDED KALMAN FILTER SKRIPSI Oleh Santhi Rohmatin NIM 081810101036 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU
ESTIMASI KETINGGIAN AIR DAN TEMPERATUR UAP PADA MODEL STEAM DRUM BOILER DENGAN METODE EXTENDED KALMAN FILTER SKRIPSI Oleh Santhi Rohmatin NIM 081810101036 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU
SISTEM KOORDINAT VEKTOR. Tri Rahajoeningroem, MT T. Elektro - UNIKOM
 SISTEM KOORDINAT VEKTOR Tri Rahajoeningroem, MT T. Elektro - UNIKOM Tujuan Pembelajaran Mahasiswa dapat memahami koordinat vektor Mahasiswa dapat menggunakan sistem koordinat vektor untuk menyelesaikan
SISTEM KOORDINAT VEKTOR Tri Rahajoeningroem, MT T. Elektro - UNIKOM Tujuan Pembelajaran Mahasiswa dapat memahami koordinat vektor Mahasiswa dapat menggunakan sistem koordinat vektor untuk menyelesaikan
ESTIMASI ARAH KEDATANGAN SUMBER JAMAK MENGGUNAKAN BAYESIAN PREDICTIVE DENSITIES. Disusun Oleh: Nrp :
 ESTIMASI ARAH KEDATANGAN SUMBER JAMAK MENGGUNAKAN BAYESIAN PREDICTIVE DENSITIES Disusun Oleh: Nama : Charli Susanto Nrp : 0422053 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha,
ESTIMASI ARAH KEDATANGAN SUMBER JAMAK MENGGUNAKAN BAYESIAN PREDICTIVE DENSITIES Disusun Oleh: Nama : Charli Susanto Nrp : 0422053 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha,
Soal-Soal dan Pembahasan Matematika IPA SNMPTN 2012 Tanggal Ujian: 13 Juni 2012
 Soal-Soal dan Pembahasan Matematika IPA SNMPTN 01 Tanggal Ujian: 13 Juni 01 1. Lingkaran (x + 6) + (y + 1) 5 menyinggung garis y 4 di titik... A. ( -6, 4 ). ( -1, 4 ) E. ( 5, 4 ) B. ( 6, 4) D. ( 1, 4 )
Soal-Soal dan Pembahasan Matematika IPA SNMPTN 01 Tanggal Ujian: 13 Juni 01 1. Lingkaran (x + 6) + (y + 1) 5 menyinggung garis y 4 di titik... A. ( -6, 4 ). ( -1, 4 ) E. ( 5, 4 ) B. ( 6, 4) D. ( 1, 4 )
Estimasi Variabel Dinamik Kapal Menggunakan Metode Kalman Filter
 JURNAL TEKNIK POMITS Vol., No., () ISSN: 79 (-97 Print) E-8 Estimasi Variabel Dinamik Kapal Menggunakan Metode Kalman Filter Nathanael Leon Gozali ), Aulia Siti Aisjah ), dan Erna Apriliani ) ) Jurusan
JURNAL TEKNIK POMITS Vol., No., () ISSN: 79 (-97 Print) E-8 Estimasi Variabel Dinamik Kapal Menggunakan Metode Kalman Filter Nathanael Leon Gozali ), Aulia Siti Aisjah ), dan Erna Apriliani ) ) Jurusan
BIFURKASI HOPF PADA SISTEM PREDATOR PREY DENGAN FUNGSI RESPON TIPE II
 BIFURKASI HOPF PADA SISTEM PREDATOR PREY DENGAN FUNGSI RESPON TIPE II SKRIPSI Diajukan kepada Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta untuk Memenuhi Sebagian Persyaratan
BIFURKASI HOPF PADA SISTEM PREDATOR PREY DENGAN FUNGSI RESPON TIPE II SKRIPSI Diajukan kepada Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta untuk Memenuhi Sebagian Persyaratan
Optimasi Pada Misil Menggunakan Bang-Bang Control Dan Ensamble Kalman Filter
 Optimasi Pada Misil Menggunakan Bang-Bang Control Dan Ensamble Kalman Filter Ahmad Zaenal Arifin Jurusan Matematika, Fakultas MIPA, Universitas PGRI Ronggolawe Tuban (UNIROW) E-Mail: kuyafira@gmail.com
Optimasi Pada Misil Menggunakan Bang-Bang Control Dan Ensamble Kalman Filter Ahmad Zaenal Arifin Jurusan Matematika, Fakultas MIPA, Universitas PGRI Ronggolawe Tuban (UNIROW) E-Mail: kuyafira@gmail.com
IDENTIFIKASI VARIABEL PADA SISTEM TEREDUKSI LINIER WAKTU KONTINU
 TUGAS AKHIR SM14151 IDENTIFIKASI VARIABEL PADA SISTEM TEREDUKSI LINIER WAKTU KONTINU SHEERTY PUTRI PERTIWI NRP 1212 1 45 Dosen Pembimbing Dr. Didik Khusnul Arif, S.Si, M.Si Dr. Dieky Adzkiya, S.Si, M.Si
TUGAS AKHIR SM14151 IDENTIFIKASI VARIABEL PADA SISTEM TEREDUKSI LINIER WAKTU KONTINU SHEERTY PUTRI PERTIWI NRP 1212 1 45 Dosen Pembimbing Dr. Didik Khusnul Arif, S.Si, M.Si Dr. Dieky Adzkiya, S.Si, M.Si
dengan vektor tersebut, namun nilai skalarnya satu. Artinya
 1. Pendahuluan Penggunaan besaran vektor dalam kehidupan sehari-hari sangat penting mengingat aplikasi besaran vektor yang luas. Mulai dari prinsip gaya, hingga bidang teknik dalam memahami konsep medan
1. Pendahuluan Penggunaan besaran vektor dalam kehidupan sehari-hari sangat penting mengingat aplikasi besaran vektor yang luas. Mulai dari prinsip gaya, hingga bidang teknik dalam memahami konsep medan
Penerapan Model Predictive Control (MPC) pada Desain Pengendalian Robot Mobil Beroda Empat
 pada Desain Pengendalian Robot Mobil Beroda Empat") Penerapan Model Predictive Control (MPC) pada Desain Pengendalian Robot Mobil Beroda Empat Dimas Avian Maulana 1 1 Universitas Negeri Surabaya email: dimasmaulana@unesa.ac.id ABSTRAK Robot mobil adalah
Penerapan Model Predictive Control (MPC) pada Desain Pengendalian Robot Mobil Beroda Empat Dimas Avian Maulana 1 1 Universitas Negeri Surabaya email: dimasmaulana@unesa.ac.id ABSTRAK Robot mobil adalah
KAJIAN MODEL MARKOV WAKTU DISKRIT UNTUK PENYEBARAN PENYAKIT MENULAR PADA MODEL EPIDEMIK SIR. Oleh: RAFIQATUL HASANAH NRP.
 TUGAS AKHIR KAJIAN MODEL MARKOV WAKTU DISKRIT UNTUK PENYEBARAN PENYAKIT MENULAR PADA MODEL EPIDEMIK SIR Oleh: RAFIQATUL HASANAH NRP. 1208 100 021 Dosen Pembimbing: Dra. Laksmi Prita Wardhani, M.Si. Drs.
TUGAS AKHIR KAJIAN MODEL MARKOV WAKTU DISKRIT UNTUK PENYEBARAN PENYAKIT MENULAR PADA MODEL EPIDEMIK SIR Oleh: RAFIQATUL HASANAH NRP. 1208 100 021 Dosen Pembimbing: Dra. Laksmi Prita Wardhani, M.Si. Drs.
PENERAPAN ALGORITMA GENETIKA UNTUK PENENTUAN PENJADWALAN JOB SHOP SECARA MONTE CARLO
 TUGAS AKHIR - ST 1325 PENERAPAN ALGORITMA GENETIKA UNTUK PENENTUAN PENJADWALAN JOB SHOP SECARA MONTE CARLO YANTER SIANIFAR BASUKI NRP 1303100049 Dosen Pembimbing Prof. Drs. Nur Iriawan, M.Ikom. Ph.D JURUSAN
TUGAS AKHIR - ST 1325 PENERAPAN ALGORITMA GENETIKA UNTUK PENENTUAN PENJADWALAN JOB SHOP SECARA MONTE CARLO YANTER SIANIFAR BASUKI NRP 1303100049 Dosen Pembimbing Prof. Drs. Nur Iriawan, M.Ikom. Ph.D JURUSAN
PERBANDINGAN METODE EXTENDED KALMAN FILTER DAN UNSCENTED KALMAN FILTER PADA ESTIMASI MODEL PREDATOR-PREY LOTKA-VOLTERRA SKRIPSI
 PERBANDINGAN METODE EXTENDED KALMAN FILTER DAN UNSCENTED KALMAN FILTER PADA ESTIMASI MODEL PREDATOR-PREY LOTKA-VOLTERRA SKRIPSI Oleh Abd. Muis Hadianto NIM 081810101005 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA
PERBANDINGAN METODE EXTENDED KALMAN FILTER DAN UNSCENTED KALMAN FILTER PADA ESTIMASI MODEL PREDATOR-PREY LOTKA-VOLTERRA SKRIPSI Oleh Abd. Muis Hadianto NIM 081810101005 JURUSAN MATEMATIKA FAKULTAS MATEMATIKA
Analisis Reduksi Model pada Sistem Linier Waktu Diskrit
 JURNAL SAINS DAN SENI ITS Vol. 5 No. 2 (216) 2337-352 (231-928X Print) A-25 Analisis Reduksi Model pada Sistem Linier Waktu Diskrit Yunita Indriana Sari dan Didik Khusnul Arif Jurusan Matematika, Fakultas
JURNAL SAINS DAN SENI ITS Vol. 5 No. 2 (216) 2337-352 (231-928X Print) A-25 Analisis Reduksi Model pada Sistem Linier Waktu Diskrit Yunita Indriana Sari dan Didik Khusnul Arif Jurusan Matematika, Fakultas
PRA-PEMPROSESAN DATA LUARAN GCM CSIRO-Mk3 DENGAN METODE TRANSFORMASI WAVELET DISKRIT
 TUGAS AKHIR - ST 1325 PRA-PEMPROSESAN DATA LUARAN GCM CSIRO-Mk3 DENGAN METODE TRANSFORMASI WAVELET DISKRIT ANGGREINI SUPRAPTI NRP 1305 100 005 Dosen Pembimbing Dr. Sutikno, S.Si, M.Si JURUSAN STATISTIKA
TUGAS AKHIR - ST 1325 PRA-PEMPROSESAN DATA LUARAN GCM CSIRO-Mk3 DENGAN METODE TRANSFORMASI WAVELET DISKRIT ANGGREINI SUPRAPTI NRP 1305 100 005 Dosen Pembimbing Dr. Sutikno, S.Si, M.Si JURUSAN STATISTIKA
Esther Wibowo
 Esther Wibowo esther.visual@gmail.com Topik Hari Ini Dasar Transformasi Translation Pemindahan, Penggeseran Scaling Perubahan Ukuran Shear Distorsi? Rotation Pemutaran Representasi Matriks Transformasi
Esther Wibowo esther.visual@gmail.com Topik Hari Ini Dasar Transformasi Translation Pemindahan, Penggeseran Scaling Perubahan Ukuran Shear Distorsi? Rotation Pemutaran Representasi Matriks Transformasi
VEKTOR. Besaran skalar (scalar quantities) : besaran yang hanya mempunyai nilai saja. Contoh: jarak, luas, isi dan waktu.
 : besaran yang hanya mempunyai nilai saja. Contoh: jarak, luas, isi dan waktu.") VEKTOR Kata vektor berasal dari bahasa Latin yang berarti "pembawa" (carrier), yang ada hubungannya dengan "pergeseran" (diplacement). Vektor biasanya digunakan untuk menggambarkan perpindahan suatu partikel
VEKTOR Kata vektor berasal dari bahasa Latin yang berarti "pembawa" (carrier), yang ada hubungannya dengan "pergeseran" (diplacement). Vektor biasanya digunakan untuk menggambarkan perpindahan suatu partikel
BAB III MODEL STATE-SPACE. dalam teori kontrol modern. Model state space dapat mengatasi keterbatasan dari
 BAB III MODEL STATE-SPACE 3.1 Representasi Model State-Space Representasi state space dari suatu sistem merupakan suatu konsep dasar dalam teori kontrol modern. Model state space dapat mengatasi keterbatasan
BAB III MODEL STATE-SPACE 3.1 Representasi Model State-Space Representasi state space dari suatu sistem merupakan suatu konsep dasar dalam teori kontrol modern. Model state space dapat mengatasi keterbatasan
R = matriks pembobot pada fungsi kriteria. dalam perancangan kontrol LQR
 DAFTAR NOTASI η = vektor orientasi arah x = posisi surge (m) y = posisi sway (m) z = posisi heave (m) φ = sudut roll (rad) θ = sudut pitch (rad) ψ = sudut yaw (rad) ψ = sudut yaw frekuensi rendah (rad)
DAFTAR NOTASI η = vektor orientasi arah x = posisi surge (m) y = posisi sway (m) z = posisi heave (m) φ = sudut roll (rad) θ = sudut pitch (rad) ψ = sudut yaw (rad) ψ = sudut yaw frekuensi rendah (rad)
Estimasi Posisi Mobile Robot Menggunakan Metode Akar Kuadrat Unscented Kalman Filter (AK-UKF)
") Estimasi Posisi Mobile Robot Menggunakan Metode Akar Kuadrat Unscented Kalman Filter (AK-UKF) Teguh Herlambang 1), Reizano Amri Rasyid 2), Sri Hartatik 3), Dinita Rahmalia 4) 1) Program Studi Sistem Informasi
Estimasi Posisi Mobile Robot Menggunakan Metode Akar Kuadrat Unscented Kalman Filter (AK-UKF) Teguh Herlambang 1), Reizano Amri Rasyid 2), Sri Hartatik 3), Dinita Rahmalia 4) 1) Program Studi Sistem Informasi
BAB I PENDAHULUAN. 1.1 Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Dalam mendisain sebuah sistem kontrol untuk sebuah plant yang parameterparameternya tidak berubah, metode pendekatan standar dengan sebuah pengontrol yang parameter-parameternya
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Dalam mendisain sebuah sistem kontrol untuk sebuah plant yang parameterparameternya tidak berubah, metode pendekatan standar dengan sebuah pengontrol yang parameter-parameternya
Implementasi Kalman Filter Pada Sensor Jarak Berbasis Ultrasonik
 Implementasi Kalman Filter Pada Sensor Jarak Berbasis Ultrasonik Hendawan Soebhakti, Rifqi Amalya Fatekha Program Studi Teknik Mekatronika, Jurusan Teknik Elektro Politeknik Negeri Batam Email : hendawan@polibatam.ac.id
Implementasi Kalman Filter Pada Sensor Jarak Berbasis Ultrasonik Hendawan Soebhakti, Rifqi Amalya Fatekha Program Studi Teknik Mekatronika, Jurusan Teknik Elektro Politeknik Negeri Batam Email : hendawan@polibatam.ac.id
BAB 4 MODEL RUANG KEADAAN (STATE SPACE)
") BAB 4 MODEL RUANG KEADAAN (STATE SPACE) KOMPETENSI Kemampuan untuk menjelaskan pengertian tentang state space, menentukan nisbah alih hubungannya dengan persamaan ruang keadaan dan Mengembangkan analisis
BAB 4 MODEL RUANG KEADAAN (STATE SPACE) KOMPETENSI Kemampuan untuk menjelaskan pengertian tentang state space, menentukan nisbah alih hubungannya dengan persamaan ruang keadaan dan Mengembangkan analisis
TE Teknik Numerik Sistem Linear
 TE 9467 Teknik Numerik Sistem Linear Operator Linear Trihastuti Agustinah Bidang Studi Teknik Sistem Pengaturan Jurusan Teknik Elektro - FTI Institut Teknologi Sepuluh Nopember O U T L I N E. Objektif.
TE 9467 Teknik Numerik Sistem Linear Operator Linear Trihastuti Agustinah Bidang Studi Teknik Sistem Pengaturan Jurusan Teknik Elektro - FTI Institut Teknologi Sepuluh Nopember O U T L I N E. Objektif.
BAB 2 PROGRAM STOKASTIK
 BAB 2 PROGRAM STOKASTIK 2.1 Pengertian Program Stokastik Banyak persoalan keputusan yang dapat dimodelkan dengan menggunakan program stokastik dengan tujuan menentukan nilai maksimum atau minimum. Tujuan
BAB 2 PROGRAM STOKASTIK 2.1 Pengertian Program Stokastik Banyak persoalan keputusan yang dapat dimodelkan dengan menggunakan program stokastik dengan tujuan menentukan nilai maksimum atau minimum. Tujuan
Pembahasan Seleksi Nasional Masuk Perguruan Tinggi Negeri (SNMPTN) Bidang Matematika. Kode Paket 634. Oleh : Fendi Alfi Fauzi 1. x 0 x 2.
 Bidang Matematika. Kode Paket 634. Oleh : Fendi Alfi Fauzi 1. x 0 x 2.") Pembahasan Seleksi Nasional Masuk Perguruan Tinggi Negeri SNMPTN) Bidang Matematika Kode Paket 6 Oleh : Fendi Alfi Fauzi. lim x 0 cos x x tan x + π )... a) b) 0 c) d) e) Jawaban : C Pembahasan: lim x 0
Pembahasan Seleksi Nasional Masuk Perguruan Tinggi Negeri SNMPTN) Bidang Matematika Kode Paket 6 Oleh : Fendi Alfi Fauzi. lim x 0 cos x x tan x + π )... a) b) 0 c) d) e) Jawaban : C Pembahasan: lim x 0
BIFURKASI TRANSKRITIKAL PADA SISTEM DINAMIK SKRIPSI
 BIFURKASI TRANSKRITIKAL PADA SISTEM DINAMIK SKRIPSI Diajukan kepada Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta untuk memenuhi sebagian persyaratan guna memperoleh gelar
BIFURKASI TRANSKRITIKAL PADA SISTEM DINAMIK SKRIPSI Diajukan kepada Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta untuk memenuhi sebagian persyaratan guna memperoleh gelar
PERAMALAN JUMLAH KUNJUNGAN WISATAWAN AUSTRALIA YANG BERKUNJUNG KE BALI MENGGUNAKAN MODEL TIME VARYING PARAMETER (TVP) KOMPETENSI STATISTIKA SKRIPSI
 KOMPETENSI STATISTIKA SKRIPSI") PERAMALAN JUMLAH KUNJUNGAN WISATAWAN AUSTRALIA YANG BERKUNJUNG KE BALI MENGGUNAKAN MODEL TIME VARYING PARAMETER (TVP) KOMPETENSI STATISTIKA SKRIPSI I PUTU GEDE DIAN GERRY SUWEDAYANA 1208405012 JURUSAN
PERAMALAN JUMLAH KUNJUNGAN WISATAWAN AUSTRALIA YANG BERKUNJUNG KE BALI MENGGUNAKAN MODEL TIME VARYING PARAMETER (TVP) KOMPETENSI STATISTIKA SKRIPSI I PUTU GEDE DIAN GERRY SUWEDAYANA 1208405012 JURUSAN
Pengantar Statistika Matematika II
 Pengantar a Matematika II - Estimator Atina Ahdika, S.Si., M.Si. Prodi a FMIPA Universitas Islam Indonesia April 17, 2017 atinaahdika.com Dalam kondisi real, kita tidak mengetahui parameter dari populasi
Pengantar a Matematika II - Estimator Atina Ahdika, S.Si., M.Si. Prodi a FMIPA Universitas Islam Indonesia April 17, 2017 atinaahdika.com Dalam kondisi real, kita tidak mengetahui parameter dari populasi
ANALISIS TIME SERIES PRODUK DOMESTIK REGIONAL BRUTO PROVINSI JAWA TIMUR DENGAN METODE ARIMA BOX-JENKINS DAN INTERVENSI
 LAPORAN TUGAS AKHIR ANALISIS TIME SERIES PRODUK DOMESTIK REGIONAL BRUTO PROVINSI JAWA TIMUR DENGAN METODE ARIMA BOX-JENKINS DAN INTERVENSI CITRA KUSUMANINGTYAS NRP 1307 100 505 Dosen Pembimbing Dr. IRHAMAH,
LAPORAN TUGAS AKHIR ANALISIS TIME SERIES PRODUK DOMESTIK REGIONAL BRUTO PROVINSI JAWA TIMUR DENGAN METODE ARIMA BOX-JENKINS DAN INTERVENSI CITRA KUSUMANINGTYAS NRP 1307 100 505 Dosen Pembimbing Dr. IRHAMAH,
PERHITUNGAN PARAMETER GELOMBANG SUARA UNTUK SUMBER BERBENTUK SEMBARANG MENGGUNAKAN METODA ELEMEN BATAS DENGAN PROGRAM MATLAB ABSTRAK
 PERHITUNGAN PARAMETER GELOMBANG SUARA UNTUK SUMBER BERBENTUK SEMBARANG MENGGUNAKAN METODA ELEMEN BATAS DENGAN PROGRAM MATLAB Garry Paulin Setiawan Email : garrypsetiawan@yahoo.com Jurusan Teknik Elektro,
PERHITUNGAN PARAMETER GELOMBANG SUARA UNTUK SUMBER BERBENTUK SEMBARANG MENGGUNAKAN METODA ELEMEN BATAS DENGAN PROGRAM MATLAB Garry Paulin Setiawan Email : garrypsetiawan@yahoo.com Jurusan Teknik Elektro,
UNIVERSITAS BINA NUSANTARA
 UNIVERSITAS BINA NUSANTARA Program Ganda Teknik Informatika - Matematika Skripsi Sarjana Program Ganda Semester Genap 2005/2006 PERANCANGAN PROGRAM APLIKASI PENENTUAN KELAYAKAN KOMPONEN MESIN BENTUK BOLA
UNIVERSITAS BINA NUSANTARA Program Ganda Teknik Informatika - Matematika Skripsi Sarjana Program Ganda Semester Genap 2005/2006 PERANCANGAN PROGRAM APLIKASI PENENTUAN KELAYAKAN KOMPONEN MESIN BENTUK BOLA
RATA-RATA KUADRAT SESATAN PENDUGA REGRESI DENGAN KOMBINASI LINIER DUA VARIABEL BANTU PADA SAMPEL ACAK SEDERHANA
 RATA-RATA KUADRAT SESATAN PENDUGA REGRESI DENGAN KOMBINASI LINIER DUA VARIABEL BANTU PADA SAMPEL ACAK SEDERHANA oleh INTAN LISDIANA NUR PRATIWI NIM. M0110040 SKRIPSI ditulis dan diajukan untuk memenuhi
RATA-RATA KUADRAT SESATAN PENDUGA REGRESI DENGAN KOMBINASI LINIER DUA VARIABEL BANTU PADA SAMPEL ACAK SEDERHANA oleh INTAN LISDIANA NUR PRATIWI NIM. M0110040 SKRIPSI ditulis dan diajukan untuk memenuhi
Dosen Pengampu : Puji Andayani, S.Si, M.Si, M.Sc
 KALKULUS III Teorema Integral Dosen Pengampu : Puji Andayani, S.Si, M.Si, M.Sc 1 INTEGRAL GARIS Integral Garis pada Fungsi Skalar Definisi : Jika f didefinisikan pada kurva diberikan secara parametrik
KALKULUS III Teorema Integral Dosen Pengampu : Puji Andayani, S.Si, M.Si, M.Sc 1 INTEGRAL GARIS Integral Garis pada Fungsi Skalar Definisi : Jika f didefinisikan pada kurva diberikan secara parametrik
ESTIMASI PARAMETER UNTUK DATA WAKTU HIDUP YANG BERDISTRIBUSI RAYLEIGH PADA DATA TERSENSOR TIPE II DENGAN METODE MAKSIMUM LIKELIHOOD SKRIPSI
 0 ESTIMASI PARAMETER UNTUK DATA WAKTU HIDUP YANG BERDISTRIBUSI RAYLEIGH PADA DATA TERSENSOR TIPE II DENGAN METODE MAKSIMUM LIKELIHOOD SKRIPSI JULHAIDI 09083045 PROGRAM STUDI SARJANA MATEMATIKA DEPARTEMEN
0 ESTIMASI PARAMETER UNTUK DATA WAKTU HIDUP YANG BERDISTRIBUSI RAYLEIGH PADA DATA TERSENSOR TIPE II DENGAN METODE MAKSIMUM LIKELIHOOD SKRIPSI JULHAIDI 09083045 PROGRAM STUDI SARJANA MATEMATIKA DEPARTEMEN
PENYELESAIAN VEHICLE ROUTING PROBLEM WITH TIME WINDOWS (VRPTW) MENGGUNAKAN ALGORITMA ANT COLONY SYSTEM
 MENGGUNAKAN ALGORITMA ANT COLONY SYSTEM") TUGAS AKHIR SM 1330 PENYELESAIAN VEHICLE ROUTING PROBLEM WITH TIME WINDOWS (VRPTW) MENGGUNAKAN ALGORITMA ANT COLONY SYSTEM HARMERITA NRP 1202 100 006 Dosen Pembimbing Drs. Soetrisno, MIKomp JURUSAN MATEMATIKA
TUGAS AKHIR SM 1330 PENYELESAIAN VEHICLE ROUTING PROBLEM WITH TIME WINDOWS (VRPTW) MENGGUNAKAN ALGORITMA ANT COLONY SYSTEM HARMERITA NRP 1202 100 006 Dosen Pembimbing Drs. Soetrisno, MIKomp JURUSAN MATEMATIKA
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Masalah estimasi variabel keadaan pada sistem dinamik sangat penting. Dalam kehidupan sehari-hari banyak muncul masalah estimasi, misalnya estimasi ketinggian pasang
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah estimasi variabel keadaan pada sistem dinamik sangat penting. Dalam kehidupan sehari-hari banyak muncul masalah estimasi, misalnya estimasi ketinggian pasang
Program Aplikasi Rekonsiliasi Data untuk Pendeteksian Gross Error pada Sistem Tangki Ganda yang Berinteraksi
 Program Aplikasi Rekonsiliasi Data untuk Pendeteksian Gross Error pada Sistem Tangki Ganda yang Berinteraksi Abstrak 1 Andreas Julianto Sutrisno, 2 Parsaulian Siregar dan 3 Estiyanti Ekawati 1 Program
Program Aplikasi Rekonsiliasi Data untuk Pendeteksian Gross Error pada Sistem Tangki Ganda yang Berinteraksi Abstrak 1 Andreas Julianto Sutrisno, 2 Parsaulian Siregar dan 3 Estiyanti Ekawati 1 Program
Pembahasan Seleksi Nasional Masuk Perguruan Tinggi Negeri (SNMPTN)
") Pembahasan Seleksi Nasional Masuk Perguruan Tinggi Negeri SNMPTN) Bidang Matematika Kode Paket Oleh : Fendi Alfi Fauzi. Lingkaran x 6) 2 + y + ) 2 menyinggung garis y di titik a), ) b), ) c) 6, ) d) 6,
Pembahasan Seleksi Nasional Masuk Perguruan Tinggi Negeri SNMPTN) Bidang Matematika Kode Paket Oleh : Fendi Alfi Fauzi. Lingkaran x 6) 2 + y + ) 2 menyinggung garis y di titik a), ) b), ) c) 6, ) d) 6,
PENGEMBANGAN APLIKASI ESTIMASI UKURAN PERANGKAT LUNAK DENGAN PENDEKATAN FUNCTION POINT ANALYSIS
 PENGEMBANGAN APLIKASI ESTIMASI UKURAN PERANGKAT LUNAK DENGAN PENDEKATAN FUNCTION POINT ANALYSIS (FPA) MENGGUNAKAN METODE RAPID APPLICATION DEVELOPMENT (RAD) Diajukan untuk Memenuhi Salah satu Syarat Mencapai
PENGEMBANGAN APLIKASI ESTIMASI UKURAN PERANGKAT LUNAK DENGAN PENDEKATAN FUNCTION POINT ANALYSIS (FPA) MENGGUNAKAN METODE RAPID APPLICATION DEVELOPMENT (RAD) Diajukan untuk Memenuhi Salah satu Syarat Mencapai
STABILISASI SISTEM KONTROL LINIER INVARIANT WAKTU DENGAN MENGGUNAKAN METODE ACKERMANN
 Jurnal Matematika UNAND Vol. 2 No. 3 Hal. 34 41 ISSN : 2303 2910 c Jurusan Matematika FMIPA UNAND STABILISASI SISTEM KONTROL LINIER INVARIANT WAKTU DENGAN MENGGUNAKAN METODE ACKERMANN DIAN PUSPITA BEY
Jurnal Matematika UNAND Vol. 2 No. 3 Hal. 34 41 ISSN : 2303 2910 c Jurusan Matematika FMIPA UNAND STABILISASI SISTEM KONTROL LINIER INVARIANT WAKTU DENGAN MENGGUNAKAN METODE ACKERMANN DIAN PUSPITA BEY
Proceeding Tugas Akhir-Januari
 Proceeding Tugas Akhir-Januari 214 1 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman, Trihastuti Agustinah Jurusan Teknik Elektro,
Proceeding Tugas Akhir-Januari 214 1 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman, Trihastuti Agustinah Jurusan Teknik Elektro,
REDUKSI RANK PADA MATRIKS-MATRIKS TERTENTU
 J. Math. and Its Appl. ISSN: 89-65X Vol. 4, No., November 7, 8 REDUKSI RANK PADA MATRIKS-MATRIKS TERTENTU Erna Apriliani, Bandung Arry Sanjoyo Jurusan Matematika FMIPA Institut Teknologi Sepuluh Nopember,
J. Math. and Its Appl. ISSN: 89-65X Vol. 4, No., November 7, 8 REDUKSI RANK PADA MATRIKS-MATRIKS TERTENTU Erna Apriliani, Bandung Arry Sanjoyo Jurusan Matematika FMIPA Institut Teknologi Sepuluh Nopember,
Pengantar Statistika Matematik(a)
") Catatan Kuliah Pengantar Statistika Matematik(a) Statistika Lebih Dari Sekadar Matematika disusun oleh Khreshna I.A. Syuhada, MSc. PhD. Kelompok Keilmuan STATISTIKA - FMIPA Institut Teknologi Bandung 2014
Catatan Kuliah Pengantar Statistika Matematik(a) Statistika Lebih Dari Sekadar Matematika disusun oleh Khreshna I.A. Syuhada, MSc. PhD. Kelompok Keilmuan STATISTIKA - FMIPA Institut Teknologi Bandung 2014
SOAL-SOAL dan PEMBAHASAN UN MATEMATIKA SMA/MA IPA TAHUN PELAJARAN 2011/2012
 SOAL-SOAL dan PEMBAHASAN UN MATEMATIKA SMA/MA IPA TAHUN PELAJARAN 0/0. Akar-akar persamaan kuadrat x +ax - 40 adalah p dan q. Jika p - pq + q 8a, maka nilai a... A. -8 B. -4 C. 4 D. 6 E. 8 BAB III Persamaan
SOAL-SOAL dan PEMBAHASAN UN MATEMATIKA SMA/MA IPA TAHUN PELAJARAN 0/0. Akar-akar persamaan kuadrat x +ax - 40 adalah p dan q. Jika p - pq + q 8a, maka nilai a... A. -8 B. -4 C. 4 D. 6 E. 8 BAB III Persamaan
Pembahasan Matematika IPA SNMPTN 2012 Kode 483
 Tutur Widodo Pembahasan Matematika IPA SNMPTN 0 Pembahasan Matematika IPA SNMPTN 0 Kode 8 Oleh Tutur Widodo. Di dalam kotak terdapat bola biru, 6 bola merah dan bola putih. Jika diambil 8 bola tanpa pengembalian,
Tutur Widodo Pembahasan Matematika IPA SNMPTN 0 Pembahasan Matematika IPA SNMPTN 0 Kode 8 Oleh Tutur Widodo. Di dalam kotak terdapat bola biru, 6 bola merah dan bola putih. Jika diambil 8 bola tanpa pengembalian,
Bab 1 : Skalar dan Vektor
 Bab 1 : Skalar dan Vektor 1.1 Skalar dan Vektor Istilah skalar mengacu pada kuantitas yang nilainya dapat diwakili oleh bilangan real tunggal (positif atau negatif). x, y dan z kita gunakan dalam aljabar
Bab 1 : Skalar dan Vektor 1.1 Skalar dan Vektor Istilah skalar mengacu pada kuantitas yang nilainya dapat diwakili oleh bilangan real tunggal (positif atau negatif). x, y dan z kita gunakan dalam aljabar
PERENCANAAN PERSEDIAAN KNIFE TC 63 mm BERDASARKAN ANALISIS RELIABILITAS (Studi Kasus di PT. FILTRONA INDONESIA)
") TUGAS AKHIR - ST 1325 PERENCANAAN PERSEDIAAN KNIFE TC 63 mm BERDASARKAN ANALISIS RELIABILITAS (Studi Kasus di PT. FILTRONA INDONESIA) RENI FANDANSARI NRP 1307100521 Dosen Pembimbing Dra. Sri Mumpuni R.,
TUGAS AKHIR - ST 1325 PERENCANAAN PERSEDIAAN KNIFE TC 63 mm BERDASARKAN ANALISIS RELIABILITAS (Studi Kasus di PT. FILTRONA INDONESIA) RENI FANDANSARI NRP 1307100521 Dosen Pembimbing Dra. Sri Mumpuni R.,
Pengantar Statistika Matematika II
 Pengantar a Matematika II Atina Ahdika, S.Si., M.Si. Prodi a FMIPA Universitas Islam Indonesia March 20, 2017 atinaahdika.com t F Parameter adalah karakteristik dari populasi (misal θ) adalah karakteristik
Pengantar a Matematika II Atina Ahdika, S.Si., M.Si. Prodi a FMIPA Universitas Islam Indonesia March 20, 2017 atinaahdika.com t F Parameter adalah karakteristik dari populasi (misal θ) adalah karakteristik
III HASIL DAN PEMBAHASAN
 Fungsi periodizer kutub tersebut dapat dituliskan pula sebagai: p θ, N, θ 0 = π N N.0 n= n sin Nn θ θ 0. () f p θ, N, θ 0 = π N N j= j sin Nj θ θ 0 diperoleh dengan menyubstitusi variabel θ pada f θ =
Fungsi periodizer kutub tersebut dapat dituliskan pula sebagai: p θ, N, θ 0 = π N N.0 n= n sin Nn θ θ 0. () f p θ, N, θ 0 = π N N j= j sin Nj θ θ 0 diperoleh dengan menyubstitusi variabel θ pada f θ =
Catatan Kuliah AK5161 Matematika Keuangan Aktuaria Insure and Invest! Dosen: Khreshna I.A. Syuhada, MSc. PhD.
 Catatan Kuliah AK5161 Matematika Keuangan Aktuaria Insure and Invest! Dosen: Khreshna I.A. Syuhada, MSc. PhD. Kelompok Keilmuan Statistika - FMIPA Institut Teknologi Bandung 2014 1 Tentang AK5161 Matematika
Catatan Kuliah AK5161 Matematika Keuangan Aktuaria Insure and Invest! Dosen: Khreshna I.A. Syuhada, MSc. PhD. Kelompok Keilmuan Statistika - FMIPA Institut Teknologi Bandung 2014 1 Tentang AK5161 Matematika
PERBANDINGAN PENYELESAIAN SISTEM OREGONATOR DENGAN METODE ITERASI VARIASIONAL DAN METODE ITERASI VARIASIONAL TERMODIFIKASI
 PERBANDINGAN PENYELESAIAN SISTEM OREGONATOR DENGAN METODE ITERASI VARIASIONAL DAN METODE ITERASI VARIASIONAL TERMODIFIKASI oleh AMELIA FEBRIYANTI RESKA M0109008 SKRIPSI ditulis dan diajukan untuk memenuhi
PERBANDINGAN PENYELESAIAN SISTEM OREGONATOR DENGAN METODE ITERASI VARIASIONAL DAN METODE ITERASI VARIASIONAL TERMODIFIKASI oleh AMELIA FEBRIYANTI RESKA M0109008 SKRIPSI ditulis dan diajukan untuk memenuhi
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Objek tiga dimensi merupakan salah satu komponen multimedia yang memegang peranan sangat penting sebagai bentuk informasi visual. Objek tiga dimensi dibentuk oleh sekumpulan
BAB I PENDAHULUAN 1.1 Latar Belakang Objek tiga dimensi merupakan salah satu komponen multimedia yang memegang peranan sangat penting sebagai bentuk informasi visual. Objek tiga dimensi dibentuk oleh sekumpulan
ESTIMASI RASIO MENGGUNAKAN KOEFISIEN REGRESI DAN KORELASI PADA PRODUKSI KACANG TANAH DI PROVINSI JAWA TENGAH
 ESTIMASI RASIO MENGGUNAKAN KOEFISIEN REGRESI DAN KORELASI PADA PRODUKSI KACANG TANAH DI PROVINSI JAWA TENGAH oleh RAMADHANI KUSUMA PUTRA M0110069 SKRIPSI ditulis dan diajukan untuk memenuhi sebagian persyaratan
ESTIMASI RASIO MENGGUNAKAN KOEFISIEN REGRESI DAN KORELASI PADA PRODUKSI KACANG TANAH DI PROVINSI JAWA TENGAH oleh RAMADHANI KUSUMA PUTRA M0110069 SKRIPSI ditulis dan diajukan untuk memenuhi sebagian persyaratan
Fisika Dasar 9/1/2016
 1 Sasaran Pembelajaran 2 Mahasiswa mampu mencari besaran posisi, kecepatan, dan percepatan sebuah partikel untuk kasus 1-dimensi dan 2-dimensi. Kinematika 3 Cabang ilmu Fisika yang membahas gerak benda
1 Sasaran Pembelajaran 2 Mahasiswa mampu mencari besaran posisi, kecepatan, dan percepatan sebuah partikel untuk kasus 1-dimensi dan 2-dimensi. Kinematika 3 Cabang ilmu Fisika yang membahas gerak benda
Pengertian. Transformasi geometric transformation. koordinat dari objek Transformasi dasar: Translasi Rotasi Penskalaan
 Pengertian Transformasi geometric transformation Transformasi = mengubah deskripsi koordinat dari objek Transformasi dasar: Translasi Rotasi Penskalaan Translasi Mengubah posisi objek: perpindahan lurus
Pengertian Transformasi geometric transformation Transformasi = mengubah deskripsi koordinat dari objek Transformasi dasar: Translasi Rotasi Penskalaan Translasi Mengubah posisi objek: perpindahan lurus
TUGAS AKHIR SM 1330 PELABELAN SUPER EDGE GRACEFUL PADA WHEEL GRAPH WICAK BUDI LESTARI SOLICHAH NRP
 TUGAS AKHIR SM 1330 PELABELAN SUPER EDGE GRACEFUL PADA WHEEL GRAPH WICAK BUDI LESTARI SOLICHAH NRP 1203 109 025 Dosen Pembimbing Drs. CHAIRUL IMRON, MIkomp JURUSAN MATEMATIKA Fakultas Matematika dan Ilmu
TUGAS AKHIR SM 1330 PELABELAN SUPER EDGE GRACEFUL PADA WHEEL GRAPH WICAK BUDI LESTARI SOLICHAH NRP 1203 109 025 Dosen Pembimbing Drs. CHAIRUL IMRON, MIkomp JURUSAN MATEMATIKA Fakultas Matematika dan Ilmu
Transformasi Datum dan Koordinat
 Transformasi Datum dan Koordinat Sistem Transformasi Koordinat RG091521 Lecture 6 Semester 1, 2013 Jurusan Pendahuluan Hubungan antara satu sistem koordinat dengan sistem lainnya diformulasikan dalam bentuk
Transformasi Datum dan Koordinat Sistem Transformasi Koordinat RG091521 Lecture 6 Semester 1, 2013 Jurusan Pendahuluan Hubungan antara satu sistem koordinat dengan sistem lainnya diformulasikan dalam bentuk
JURNAL TEKNIK POMITS Vol. 3, No. 1, (2014) ISSN: ( Print) B-58
 ISSN: ( Print) B-58") JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-58 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman,
JURNAL TEKNIK POMITS Vol. 3, No. 1, (214) ISSN: 2337-3539 (231-9271 Print) B-58 Swing-up dan Stabilisasi pada Sistem Pendulum Kereta menggunakan Metode Fuzzy dan Linear Quadratic Regulator Renditia Rachman,
Silabus dan Rencana Pelaksanaan Pembelajaran (RPP)
") Siswanto MODEL Silabus dan Rencana Pelaksanaan Pembelajaran (RPP) MATEMATIKA INOVATIF Konsep dan Aplikasinya 3A untuk Kelas XII SMA dan MA Semester 1 Program Ilmu Pengetahuan Alam Berdasarkan Permendiknas
Siswanto MODEL Silabus dan Rencana Pelaksanaan Pembelajaran (RPP) MATEMATIKA INOVATIF Konsep dan Aplikasinya 3A untuk Kelas XII SMA dan MA Semester 1 Program Ilmu Pengetahuan Alam Berdasarkan Permendiknas
Metode Identifikasi Rekursif. Zulkifli Hidayat Laboratorium Teknik Sistem Jurusan Teknik Elektro FTI - ITS
 Metode Identifikasi Rekursif Zulkifli Hidayat Laboratorium Teknik Sistem Jurusan Teknik Elektro FTI - ITS Mengapa Identifikasi Rekursif? Alasan menggunakan identifikasi rekursif Estimasi online Sistem
Metode Identifikasi Rekursif Zulkifli Hidayat Laboratorium Teknik Sistem Jurusan Teknik Elektro FTI - ITS Mengapa Identifikasi Rekursif? Alasan menggunakan identifikasi rekursif Estimasi online Sistem
Keep running VEKTOR. 3/8/2007 Fisika I 1
 VEKTOR 3/8/007 Fisika I 1 BAB I : VEKTOR Besaran vektor adalah besaran yang terdiri dari dua variabel, yaitu besar dan arah. Sebagai contoh dari besaran vektor adalah perpindahan. Sebuah besaran vektor
VEKTOR 3/8/007 Fisika I 1 BAB I : VEKTOR Besaran vektor adalah besaran yang terdiri dari dua variabel, yaitu besar dan arah. Sebagai contoh dari besaran vektor adalah perpindahan. Sebuah besaran vektor
APLIKASI MENGUBAH POLARISASI FRAME GAMBAR 2 DIMENSI MENJADI 3 DIMENSI
 APLIKASI MENGUBAH POLARISASI FRAME GAMBAR 2 DIMENSI MENJADI 3 DIMENSI ABDUL ARDI 41507110115 PROGRAM STUDI TEKNIK INFORMATIKA FAKULTAS ILMU KOMPUTER UNIVERSITAS MERCU BUANA JAKARTA 2014 APLIKASI MENGUBAH
APLIKASI MENGUBAH POLARISASI FRAME GAMBAR 2 DIMENSI MENJADI 3 DIMENSI ABDUL ARDI 41507110115 PROGRAM STUDI TEKNIK INFORMATIKA FAKULTAS ILMU KOMPUTER UNIVERSITAS MERCU BUANA JAKARTA 2014 APLIKASI MENGUBAH
panjang yang berukuran x i dan y i. Ambil sebuah titik pada sub persegi d
 INTEGAL ANGKAP. Integral angkap Dua. Volume dan Pusat Massa. Integral angkap Tiga.4 Koordinat Tabung dan Koordinat Bola.. Intergral angkap Dua Misal diberikan daerah di bidang XOY ang berbentuk persegi
INTEGAL ANGKAP. Integral angkap Dua. Volume dan Pusat Massa. Integral angkap Tiga.4 Koordinat Tabung dan Koordinat Bola.. Intergral angkap Dua Misal diberikan daerah di bidang XOY ang berbentuk persegi
Simulasi Pendeteksian Sinyal Target Tunggal Yang Mengalami Gangguan Pada Radar ABSTRAK
 Simulasi Pendeteksian Sinyal Target Tunggal Yang Mengalami Gangguan Pada Radar Imanudin Muchtiar / 0122180 Jurusan Teknik Elektro, Fakultas Teknik, Jl. Prof. Drg. Suria Sumantri 65, Bandung 40164, Indonesia
Simulasi Pendeteksian Sinyal Target Tunggal Yang Mengalami Gangguan Pada Radar Imanudin Muchtiar / 0122180 Jurusan Teknik Elektro, Fakultas Teknik, Jl. Prof. Drg. Suria Sumantri 65, Bandung 40164, Indonesia
BAB 3 DINAMIKA GERAK LURUS
 BAB 3 DINAMIKA GERAK LURUS A. TUJUAN PEMBELAJARAN 1. Menerapkan Hukum I Newton untuk menganalisis gaya-gaya pada benda 2. Menerapkan Hukum II Newton untuk menganalisis gerak objek 3. Menentukan pasangan
BAB 3 DINAMIKA GERAK LURUS A. TUJUAN PEMBELAJARAN 1. Menerapkan Hukum I Newton untuk menganalisis gaya-gaya pada benda 2. Menerapkan Hukum II Newton untuk menganalisis gerak objek 3. Menentukan pasangan
STATISTIK PERTEMUAN VI
 STATISTIK PERTEMUAN VI 1. TEORI PENDUKUNG 1.1 Pendahuluan 1. Variabel acak 1.3 Distribusi variabel acak diskrit 1.4 Distribusi variabel acak kontinu 1.5 Distribusi multivariat 1.1 Pendahuluan Definisi
STATISTIK PERTEMUAN VI 1. TEORI PENDUKUNG 1.1 Pendahuluan 1. Variabel acak 1.3 Distribusi variabel acak diskrit 1.4 Distribusi variabel acak kontinu 1.5 Distribusi multivariat 1.1 Pendahuluan Definisi
KINEMATIKA. Fisika. Tim Dosen Fisika 1, ganjil 2016/2017 Program Studi S1 - Teknik Telekomunikasi Fakultas Teknik Elektro - Universitas Telkom
 KINEMATIKA Fisika Tim Dosen Fisika 1, ganjil 2016/2017 Program Studi S1 - Teknik Telekomunikasi Fakultas Teknik Elektro - Universitas Telkom Sasaran Pembelajaran Indikator: Mahasiswa mampu mencari besaran
KINEMATIKA Fisika Tim Dosen Fisika 1, ganjil 2016/2017 Program Studi S1 - Teknik Telekomunikasi Fakultas Teknik Elektro - Universitas Telkom Sasaran Pembelajaran Indikator: Mahasiswa mampu mencari besaran
ABSTRAK. Teknologi pengkode sinyal suara mengalami kemajuan yang cukup. pesat. Berbagai metode telah dikembangkan untuk mendapatkan tujuan dari
 ABSTRAK Teknologi pengkode sinyal suara mengalami kemajuan yang cukup pesat. Berbagai metode telah dikembangkan untuk mendapatkan tujuan dari pengkode sinyal suara yaitu output sinyal suara yang mempunyai
ABSTRAK Teknologi pengkode sinyal suara mengalami kemajuan yang cukup pesat. Berbagai metode telah dikembangkan untuk mendapatkan tujuan dari pengkode sinyal suara yaitu output sinyal suara yang mempunyai
Soal-Soal dan Pembahasan Matematika IPA SNMPTN 2012 Tanggal Ujian: 13 Juni 2012
 Soal-Soal dan Pembahasan Matematika IPA SNMPTN 01 Tanggal Ujian: 13 Juni 01 1. Lingkaran (x + 6) + (y + 1) 5 menyinggung garis y 4 di titik... A. ( -6 4 ). ( -1 4 ) E. ( 5 4 ) B. ( 6 4) D. ( 1 4 ) BAB
Soal-Soal dan Pembahasan Matematika IPA SNMPTN 01 Tanggal Ujian: 13 Juni 01 1. Lingkaran (x + 6) + (y + 1) 5 menyinggung garis y 4 di titik... A. ( -6 4 ). ( -1 4 ) E. ( 5 4 ) B. ( 6 4) D. ( 1 4 ) BAB
ANALISIS KESTABILAN DARI SISTEM DINAMIK MODEL SEIR PADA PENYEBARAN PENYAKIT CACAR AIR (VARICELLA) DENGAN PENGARUH VAKSINASI SKRIPSI
 DENGAN PENGARUH VAKSINASI SKRIPSI") ANALISIS KESTABILAN DARI SISTEM DINAMIK MODEL SEIR PADA PENYEBARAN PENYAKIT CACAR AIR (VARICELLA) DENGAN PENGARUH VAKSINASI SKRIPSI Diajukan kepada Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas
ANALISIS KESTABILAN DARI SISTEM DINAMIK MODEL SEIR PADA PENYEBARAN PENYAKIT CACAR AIR (VARICELLA) DENGAN PENGARUH VAKSINASI SKRIPSI Diajukan kepada Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas
IMPLEMENTASI PEMODELAN ARTIFICIAL NEURAL NETWORKS (ANN) DALAM PREDIKSI DATA TIME SERIES PENJUALAN STUDI KASUS PT.
 DALAM PREDIKSI DATA TIME SERIES PENJUALAN STUDI KASUS PT.") TUGAS AKHIR CI1599 IMPLEMENTASI PEMODELAN ARTIFICIAL NEURAL NETWORKS (ANN) DALAM PREDIKSI DATA TIME SERIES PENJUALAN STUDI KASUS PT. VARIA USAHA BETON ATHUR ADHI BUWANA NRP 5102 109 044 Dosen Pembimbing
TUGAS AKHIR CI1599 IMPLEMENTASI PEMODELAN ARTIFICIAL NEURAL NETWORKS (ANN) DALAM PREDIKSI DATA TIME SERIES PENJUALAN STUDI KASUS PT. VARIA USAHA BETON ATHUR ADHI BUWANA NRP 5102 109 044 Dosen Pembimbing