BAB II WATERPAS DIGITAL
|
|
|
- Ari Darmali
- 6 tahun lalu
- Tontonan:
Transkripsi
1 BAB II WATERPAS DIGITAL Pada bab ini akan dijelaskan secara singkat mengenai teori dasar yang digunakan untuk merealisasikan waterpass digital yang dirancang. 2.1 Accelerometer Accelerometer adalah sebuah transduser yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran ataupun untuk mengukur percepatan gravitasi bumi[1]. Accelerometer juga dapat digunakan untuk mengukur getaran yang terjadi pada kendaraan, bangunan, mesin, dan juga bisa digunakan untuk mengukur getaran yang terjadi di dalam bumi, getaran mesin, jarak yang dinamis, dan kecepatan dengan ataupun tanpa pengaruh gravitasi bumi. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut percepatan(acceleration). Jika kecepatan semakin berkurang daripada kecepatan sebelumnya, disebut deceleration. Percepatan juga bergantung pada arah atau orientasi karena merupakan penurunan kecepatan yang merupakan besaran vektor. Berubahnya arah pergerakan suatu benda akan menimbulkan percepatan pula Accelerometer LIS3LV02DL Sensor accelerometer yang digunakan adalah LIS3LV02DL buatan STmicroelectronics yang mempunyai 3 axis (x,y,z) pengukuran dengan output data digital yang linier (±2g - ±6g). Antar muka yang digunakan dapat berupa two-wire interface - I²C (Inter-Integrated Circuit) atau SPI (Serial Perihperal Interface). Berikut adalah gambar blok diagram dari sensor accelerometer : 6
2 Gambar 2.1. Blok diagram accelerometer LIS3LV02DL. Antarmuka keluaran LIS3LV02DL yang disediakan dapat dipilih menggunakan komunikasi I 2 C atau SPI. Konsumsi arus yang digunakan sangat rendah, berkisar antara 0,6 ma hingga 0,8 ma. Selain itu pengguna juga dapat memilih keluaran data dengan ketelitian 12 bit atau 16 bit. Konfigurasi pin dari sensor accelerometer dapat dilihat pada Gambar 2.2. Penjelasan dari masing-masing fungsi pin yang terdapat pada sensor dapat dilihat pada Tabel 2.1[2]. Konfigurasi pin accelerometer dapat dilihat pada Gambar 2.2 : Gambar 2.2. Konfigurasi Pin LIS3LV02DL. 7
3 Tabel 2.1. Deskripsi pin LIS3LV02DL. Pin Nama Pin Fungsi 1 RDY/INT Data ready/inertial wake-up interrupt 2 SDO SPI Serial Data Output 3 SDA/ SDI/ SDO I 2 C Serial Data (SDA) SPI Serial Data Input (SDI) 3-wire Interface Serial Data Output (SDO) 4 Vdd_IO Power supply for I/O pads 5 SCL/SPC I 2 C Serial Clock (SCL) SPI Serial Port Clock (SPC) 6 CS SPI enable I 2 C/SPI mode selection (1: I 2 C mode; 0: SPI enabled) 7 NC Tidak terkoneksi 8 CK Eksternal clock, atau dihubungkan ke GND 9 GND 0V supply 10 Reserved Tidak terkoneksi atau dihubungkan menuju Vdd_IO 11 Vdd Power supply 12 Reserved Dihubungkan menuju Vdd 13 Vdd Power supply 14 GND 0V supply 15 Reserved Tidak terkoneksi atau dihubungkan ke GND 16 GND 0V supply Karakteristik dari sensor accelerometer LIS3LV02DL dapat dilihat pada Tabel 2.2[2]. Karakteristik tersebut diperoleh melalui pengukuran yang dilakukan pada tegangan VDD 3.3V dan suhu 25 o C. Dari tabel tersebut dapat dilihat bahwa sensor accelerometer tipe ini mampu mengukur percepatan gravitasi dengan jangkauan pengukuran yang dapat dipilih antara ± 2g atau ± 6g. 8
4 Tabel 2.2. Karakteristik Sensor LIS3LV02DL. Parameter Kondisi pengujian Min. Typ. Max. Satuan Jangkauan Full Scale = ± 2g ± 1.7 ± 2 g pengukuran Full Scale = ± 6g ± 5.3 ± 6 g Resolusi alat Full scale = ± 2g Bandwidth=40Hz 1.0 Mg Full scale = ± 2g Representasi LSB/g Sensitivitas bit Full scale = ± 6g Representasi LSB/g bit Perubahan sensitivitas %/ o C terhadap suhu Lebar pita sistem ODRx/4 Hz Jangkauan suhu pengoperasian o C Sensitivitas dari accelerometer sebesar 1024 LSB/g, dapat diartikan percepatan 1 gravitasi sebanding dengan keluaran data sebesar Sedangkan jika dikonfigurasikan pada skala penuh ± 6g, sensitivitasnya berkurang menjadi 340 LSB/g. Sensor accelerometer terpengaruh pada perubahan suhu lingkungan. Dalam datasheet disebutkan bahwa sensor ini akan berubah sebesar 0,025% tiap 1 o C. Sebagai antarmuka komunikasi data, sensor accelerometer LIS3LV02DL dapat diakses melalui protokol I 2 C maupun menggunakan protokol SPI (Serial Parallel Interface). Untuk memilih jenis komunikasi mana yang digunakan untuk melakukan akses sensor digunakan pin CS. Jika pin CS bernilai 1, maka protokol pengaksesan data menggunakan komunikasi I 2 C. Jika pin CS bernilai 0, protokol yang digunakan 9
5 adalah SPI. Tabel 2.3 merupakan tabel pin yang digunakan untuk melakukan akses menuju sensor beserta fungsinya. Tabel 2.3. Deskripsi pin antarmuka serial LIS3LV02DL Permodelan dan pengaruh sensor accelerometer Pada sensor ini dapat disamakan dengan prinsip gaya massa pegas pada benda. Hokum Hooke mangatakan gaya yang bekerja pada sebuah pegas sebanding dengan konstanta pegas dan perubahan jarak pegas dari posisi semula[3]. Jika sebuah gaya bekerja pada sebuah pegas hingga pegas meregang, maka pegas akan memberikan gaya reaksi sebesar: F = k x (2.2) dimana : F = Gaya pegas (N) k = konstanta pegas Δx = perubahan panjang pegas akibat regangan (m) Percepatan yang timbul oleh gaya yang bekerja pada suatu benda besarnya berbanding lurus dengan gaya pegas dan berbanding terbalik dengan massa benda, berdasarkan hukum Newton II. Dalam persamaan matematis : F = m a (2.3) dimana : F = Gaya yang bekerja pada benda(n) m = massa benda(kg) a = percepatan yang dialami benda(m/s 2 ). 10

6 Gambar dibawah ini menunjukkan sebuah massa yang dihubungkan dengan sebuah pegas yang dipasang pada sebuah sistem yang dapat bergerak. Saat sistem tersebut diberi gaya F sehingga akan mengalami percepatan a, gaya tersebut akan menyebabkan pegas meregang dan juga dapat merapat. Sehingga dari kedua hukum di atas tersebut dapat ditulis persamaan : F = m. a = k x (2.4) dimana : F = Gaya yang bekerja pada benda(n) m = massa benda(kg) a = percepatan yang dialami benda(m/s 2 ). k = konstanta pegas Δx = perubahan panjang pegas akibat regangan (m) Gambar 2.3. Massa pegas untuk mengukur percepatan. Sehingga dapat diketahui bahwa percepatan a akan menyebabkan benda bermassa m akan mengalami perpindahan sebesar x = ma. Jika perpindahan posisi k tersebut diketahui, maka dapat diketahui bahwa percepatan yang dialami oleh benda sebesar : k x a =. (2.5) m 11

7 Saat sensor dalam keadaan diam(statis), sensor akan medeteksi adanya percepatan gravitasi yang bekerja. Hal ini disebabkan setiap benda yang memiliki massa berada pada jangkauan gravitasi bumi akan terpengaruh oleh gaya gravitasi bumi yang besarnya dapat ditulis dalam persamaan 2.6: F g = m. g (2.6) dimana: F g = Gaya berat benda (N) m = Massa benda (kg) g = Percepatan gravitasi bumi (m/s 2 ) Dari Gambar 2.4 suatu massa pegas dalam keadaan diam pada bidang datar yang sejajar dengan permukaan bumi. Besarnya gaya gravitasi tidak menyebabkan perubahan posisi massa pada arah sumbu ukur. Namun jika massa pegas diletakkan pada bidang miring yang membentuk sudut θ terhadap arah gravitasi bumi maka gaya gravitasi akan menyebabkan pegas mengalami peregangan sesuai dengan besar percepatan yang dialami oleh massa pegas sebesar gcosθ. Untuk lebih jelasnya dapat dilihat pada Gambar 2.5. Gambar 2.4. Sistem massa pegas pada bidang datar. 12


8 Gambar 2.5. Sistem massa pegas dalam posisi miring. Untuk memahami lebih jelas tentang accelerometer, maka digunakan ilustrasi gambar bola yang menggambarkan percepatan sebuah accelerometer. Gambar 2.6 s.d Gambar 2.9 adalah ilustrasi accelerometer yang digambarkan dalam bentuk bola[4]. Gambar 2.6. Ilustrasi Accelerometer X=0g,Y=0g,Z=0g. 13


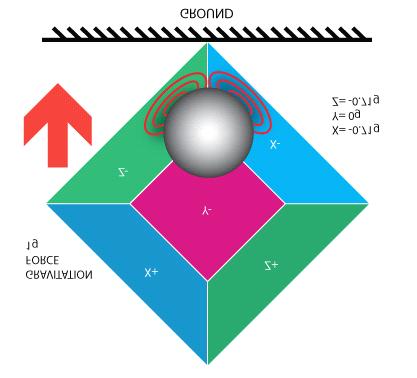
9 Gambar 2.7. Ilustrasi Accelerometer X=-1g,Y=0g,Z=0g. Gambar 2.8. Ilustrasi Accelerometer X=0g,Y=0g,Z=-1g. Gambar 2.9. Ilustrasi Accelerometer X=-0.71g,Y=0g,Z=-0.71g. 14
10 Ilustrasi accelerometer juga bisa digambarkan dalam bentuk vektor dapat dilihat pada Gambar 2.10[4]. Gambar Ilustrasi Vektor Accelerometer tiga sumbu. Dari ilustrasi vektor dapat diketahui bahwa : cos(axr) = Rx / R (2.7) cos(ayr) = Ry / R (2.8) cos(azr) = Rz / R (2.9) R = Rx + Ry Rz (2.10) Dari persamaan diatas bisa diketahui sudutnya yaitu : Axr = arccos(rx/r) (2.11) Ayr = arccos(ry/r) (2.12) Azr = arccos(rz/r) (2.13) cosx = cos(axr) = Rx / R (2.14) cosy = cos(ayr) = Ry / R (2.15) cosz = cos(azr) = Rz / R (2.16) 15
11 Rumus triplet ini sering disebut direction cosine dan juga bisa direpresentasikan dalam persamaan : 1 z = cos x + cos y + cos (2.17) 2.2 Mikrokontroler AVR Berdasarkan arsitekturnya, AVR merupakan mikrokontroler RISC (Reduce Instruction Set Computer) dengan lebar bus data 8 bit. Berbeda dengan sistem AT89S51/52 yang memiliki frekuensi kerja seperduabelas kali frekuensi osilator, frekuensi kerja mikrokontroler AVR ini pada dasarnya sama dengan frekuensi osilator. Hal tersebut menyebabkan kecepatan kerja AVR untuk frekuensi osilator yang sama, akan dua belas kali lebih cepat dibandingkan dengan mikrokontroler keluarga AT89S51/52. Semua jenis AVR telah dilengkapi dengan memori flash sebagai memori program. Kapasitas memori flash yang dimiliki bervariasi dari 1k sampai 128 kb. Secara teknis, memori jenis ini dapat diprogram melalui saluran antarmuka yang dikenal dengan nama Serial Peripheral Interface (SPI) yang terdapat pada setiap seri AVR tersebut. Untuk penyimpanan data, mikrokontroler AVR menyediakan dua jenis memori yang berbeda: EEPROM (Electrically Erasable Programmable Read Only Memory) dan SRAM (Static Random Access Memory). EEPROM umumnya digunakan untuk menyimpan data-data program yang bersifat permanen, sedangkan SRAM digunakan untuk menyimpan data variabel yang dimungkinkan berubah setiap saatnya. Kapasitas simpan data kedua memori ini bervariasi tergantung pada jenis AVR-nya. Untuk seri AVR yang tidak memiliki SRAM, penyimpanan data variabel dapat dilakukan pada register serbaguna yang terdapat pada CPU mikrokontroler tersebut. 16
12 2.2.1 Mikrokontroler Atmega32 Fasilitas dari mikrokontroler atmega32 : Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D. ADC 10 bit sebanyak 8 saluran. Tiga buah timer/counter dengan kemampuan pembandingan. CPU yang terdiri atas 32 buah register. Watchdog timer dengan osilator internal. SRAM sebesar 2 KB. Memori flash sebesar 32 KB dengan kemampuan Read While Write. Unit interupsi internal dan eksternal. Port antarmuka SPI. EEPROM sebesar 1024 B yang dapat diprogram saat operasi. Antarmuka komparator analog. Port USART untuk komunikasi serial. Konfigurasi pin dari mikrokontroler atmega32 : 17

13 Gambar Pinout ATMEGA32 [2]. 18
14 Tabel 2.4. Tabel deskripsi masing-masing Pin ATMEGA32[4]. PIN KETERANGAN 1..8 Port B merupakan port I/O 8bit dua arah dengan internal pull-up. Selain sebagai I/O, port B juga dapat difungsikan secara individu sebagai berikut : PB7 : SCK (SPI Bus Serial clock) PB6 : MISO (SPI Bus Master Input/Slave Ouput) PB5 : MOSI (SPI Bus Master Output/Slave Input) PB4 : /SS (SPI Slave Select Input) PB3 : AIN1 (Analog Comparator Negative Input) OC0 (Output Compare Timer/Couter 0) PB2 : AIN0 (Analog Comparator Positive Input) INT2 (External Interrupt 2 Input) PB1 : T1 (Timer/Counter 1 External Counter Input) PB0 : T0 (Timer/Counter 0 External Counter Input) XCK (USART External Clock Input,Output) Tabel 2.4. Lanjutan Tabel deskripsi masing-masing Pin ATMEGA32[4]. 9 /RST : merupakan pin reset yang akan bekerja bila diberi pulsa low (active low) selama minimal 1.5us 10 VCC : Catu daya digital 11 GND : Ground untuk catu daya sinyal 12 XTAL2 : merupakan output dari penguat osilator pembalik 13 XTAL1 : merupakan input untuk penguat osilator pembalik 19
15 Tabel 2.4. Tabel deskripsi masing-masing Pin ATMEGA32[4] lanjutan. PIN KETERANGAN Port D merupakan port I/O 8bit dua arah dengan internal pull-up. Selain sebagai I/O, port D juga dapat difungsikan secara individu sebagai berikut : PD7 : OC2 (Output Compare Timer/Counter 2) PD6 : ICP1 (Timer Counter Input Capture) PD5 : OC1A (Output Compare A Timer/Counter 1) PD4 : OC1B (Output Compare B Timer/Counter 1) PD3 : INT1 (External Interrupt 1 Input) PD2 : INT2 (External Interrupt 2 Input) PD1 : TXD (USART Transmit) PD0 : RXD (USART Receive) Port C merupakan port I/O 8bit dua arah dengan internal pull-up. Selain sebagai I/O, port C juga dapat difungsikan secara individu sebagai berikut : PC7 : TOSC2 (Timer Oscilator 2) PC6 : TOSC1 (Timer Oscilator 1) PC1 : SDA (Serial Data Input/Output,I2C) PC0 : SCL (Serial Data Clock) 30 AVCC, Merupakan catu daya bagi internal ADC di PORTA 31 GND, untuk catu daya ADC 32 AREF, Merupakan catu daya referensi ADC Port A merupakan port I/O 8bit dua arah dengan internal pull-up. Selain sebagai I/O, port A juga dapat difungsikan sebagai ADC 2.3 LCD (Liquid Crystal Display) Liquid Crystal Display atau sering disebut LCD, merupakan sebuah teknologi layar digital yang menghasilkan citra pada permukaan yang rata atau flat dengan 20
16 memberi Kristal cair dan filter yang mempunyai struktur molekul polar diapit oleh elektroda yang transparan. Lcd mempunyai fungsi untuk menampilkan suatu nilai hasil sensor, menampilkan teks, atau menampilkan menu pada aplikasi mikrokontroller. Dalam penyusunan tugas akhir ini digunakan LCD Nokia 3310, yang merupakan salah satu Lcd grafik dengan ukuran 84x48pixel[5]. LCD tersebut memiliki seri yaitu PCD8544. PCD8544 merupakan CMOS LCD control dengan keluaran tegangan rendah, digunakan untuk merangsang gerakan pada layar grafik dengan 48 baris dan 84 kolom. PCD8544 menghubungkan ke mikrokontroller melalui serial bus interface. Berikut adalah block diagram dari PCD8544[5]. Gambar Diagram Block PCD

17 Berikut adalah konfigurasi pin dari Lcd Nokia 3310: Tabel 2.5. Konfigurasi pin Lcd Nokia
MICROCONTROLER AVR AT MEGA 8535
 MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Jenis Mikrokontroler AVR dan spesifikasinya Flash adalah suatu jenis Read Only Memory yang biasanya diisi dengan program
MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Jenis Mikrokontroler AVR dan spesifikasinya Flash adalah suatu jenis Read Only Memory yang biasanya diisi dengan program
Sistem Minimum Mikrokontroler. TTH2D3 Mikroprosesor
 Sistem Minimum Mikrokontroler TTH2D3 Mikroprosesor MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang memiliki
Sistem Minimum Mikrokontroler TTH2D3 Mikroprosesor MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang memiliki
MICROCONTROLER AVR AT MEGA 8535
 MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang
MICROCONTROLER AVR AT MEGA 8535 Dwisnanto Putro, S.T., M.Eng. MIKROKONTROLER AVR Mikrokontroler AVR merupakan salah satu jenis arsitektur mikrokontroler yang menjadi andalan Atmel. Arsitektur ini dirancang
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 1.1 Penelitian Terdahulu Sebagai bahan pertimbangan dalam penelitian ini akan dicantumkan beberapa hasil penelitian terdahulu : Penelitian yang dilakukan oleh Universitas Islam
BAB II TINJAUAN PUSTAKA 1.1 Penelitian Terdahulu Sebagai bahan pertimbangan dalam penelitian ini akan dicantumkan beberapa hasil penelitian terdahulu : Penelitian yang dilakukan oleh Universitas Islam
BAB II ALAT UJI REM PORTABEL Kecepatan Rata-Rata dan Kecepatan Sesaat
 BAB II ALAT UJI REM PORTABEL Dalam merealisasikan alat uji rem portabel diperlukan dasar teori untuk menunjang agar didapatkan hasil yang optimal. Pada bab ini akan dibahas secara singkat mengenai teori
BAB II ALAT UJI REM PORTABEL Dalam merealisasikan alat uji rem portabel diperlukan dasar teori untuk menunjang agar didapatkan hasil yang optimal. Pada bab ini akan dibahas secara singkat mengenai teori
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB II Dasar Teori 2.1 RFID
 BAB II Dasar Teori Pada bab ini akan dibahas teori yang digunakan untuk merealisasikan sistem presensi dosen dan mahasiswa on-line dengan menggunakan RFID dan wifi. Dalam perancangan ini komponen perangkat
BAB II Dasar Teori Pada bab ini akan dibahas teori yang digunakan untuk merealisasikan sistem presensi dosen dan mahasiswa on-line dengan menggunakan RFID dan wifi. Dalam perancangan ini komponen perangkat
BAB II TINJAUAN PUSTAKA. Gambar 2.1. Simbol LED [8]
![BAB II TINJAUAN PUSTAKA. Gambar 2.1. Simbol LED [8]](/thumbs/63/49160388.jpg "BAB II TINJAUAN PUSTAKA. Gambar 2.1. Simbol LED [8]") BAB II TINJAUAN PUSTAKA 2.1. Light Emiting Dioda Light Emiting Diode (LED) adalah komponen yang dapat memancarkan cahaya. Sstruktur LED sama dengan dioda. Untuk mendapatkan pancaran cahaya pada semikonduktor,
BAB II TINJAUAN PUSTAKA 2.1. Light Emiting Dioda Light Emiting Diode (LED) adalah komponen yang dapat memancarkan cahaya. Sstruktur LED sama dengan dioda. Untuk mendapatkan pancaran cahaya pada semikonduktor,
BAB II TINJAUAN PUSTAKA. Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam
 BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler ATMega 8535 Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Mikrokontroler AVR ini memiliki arsitektur
BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroler ATMega 8535 Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Mikrokontroler AVR ini memiliki arsitektur
Mikrokontroler AVR. Hendawan Soebhakti 2009
 Mikrokontroler AVR Hendawan Soebhakti 2009 Tujuan Mampu menjelaskan arsitektur mikrokontroler ATMega 8535 Mampu membuat rangkaian minimum sistem ATMega 8535 Mampu membuat rangkaian downloader ATMega 8535
Mikrokontroler AVR Hendawan Soebhakti 2009 Tujuan Mampu menjelaskan arsitektur mikrokontroler ATMega 8535 Mampu membuat rangkaian minimum sistem ATMega 8535 Mampu membuat rangkaian downloader ATMega 8535
Sistem Mikrokontroler FE UDINUS
 Minggu ke 2 8 Maret 2013 Sistem Mikrokontroler FE UDINUS 2 Jenis jenis mikrokontroler Jenis-jenis Mikrokontroller Secara teknis, hanya ada 2 macam mikrokontroller. Pembagian ini didasarkan pada kompleksitas
Minggu ke 2 8 Maret 2013 Sistem Mikrokontroler FE UDINUS 2 Jenis jenis mikrokontroler Jenis-jenis Mikrokontroller Secara teknis, hanya ada 2 macam mikrokontroller. Pembagian ini didasarkan pada kompleksitas
BAB II DASAR TEORI 2.1. Mikrokontroler AVR ATmega32
 BAB II DASAR TEORI Pada bab ini akan menerangkan beberapa teori dasar yang mendukung terciptanya skripsi ini. Teori-teori tersebut antara lain mikrokontroler AVR ATmega32, RTC (Real Time Clock) DS1307,
BAB II DASAR TEORI Pada bab ini akan menerangkan beberapa teori dasar yang mendukung terciptanya skripsi ini. Teori-teori tersebut antara lain mikrokontroler AVR ATmega32, RTC (Real Time Clock) DS1307,
BAB II DASAR TEORI. mikrokontroler yang berbasis chip ATmega328P. Arduino Uno. memiliki 14 digital pin input / output (atau biasa ditulis I/O, dimana
 BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino Uno R3 adalah papan pengembangan mikrokontroler yang berbasis chip ATmega328P. Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O,
BAB II DASAR TEORI 2.1 Arduino Uno R3 Arduino Uno R3 adalah papan pengembangan mikrokontroler yang berbasis chip ATmega328P. Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O,
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Dasar Breastpump ASI (Air Susu Ibu) adalah makanan bayi yang paling penting terutama pada bulan-bulan pertama kehidupan. ASI merupakan sumber gizi yang sangat ideal dengan komposisi
BAB II TINJAUAN PUSTAKA 2.1 Dasar Breastpump ASI (Air Susu Ibu) adalah makanan bayi yang paling penting terutama pada bulan-bulan pertama kehidupan. ASI merupakan sumber gizi yang sangat ideal dengan komposisi
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1. Motor DC dan Motor Servo 2.1.1. Motor DC Motor DC berfungsi mengubah tenaga listrik menjadi tenaga gerak (mekanik). Berdasarkan hukum Lorenz bahwa jika suatu kawat listrik diberi
BAB II LANDASAN TEORI 2.1. Motor DC dan Motor Servo 2.1.1. Motor DC Motor DC berfungsi mengubah tenaga listrik menjadi tenaga gerak (mekanik). Berdasarkan hukum Lorenz bahwa jika suatu kawat listrik diberi
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroller 8535 Mikrokontroller adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus. Biasanya digunakan untuk pengontrolan otomatis dan manual pada
BAB II TINJAUAN PUSTAKA 2.1 Mikrokontroller 8535 Mikrokontroller adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus. Biasanya digunakan untuk pengontrolan otomatis dan manual pada
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Produk yang Sejenis 2.1.1 Produk Sejenis Alat ukur tekanan ban yang banyak ditemukan dipasaran dan paling banyak digunakan adalah manometer. Manometer adalah alat ukur tekanan
BAB II TINJAUAN PUSTAKA 2.1 Produk yang Sejenis 2.1.1 Produk Sejenis Alat ukur tekanan ban yang banyak ditemukan dipasaran dan paling banyak digunakan adalah manometer. Manometer adalah alat ukur tekanan
MIKROKONTROLER Arsitektur Mikrokontroler AT89S51
 MIKROKONTROLER Arsitektur Mikrokontroler AT89S51 Ringkasan Pendahuluan Mikrokontroler Mikrokontroler = µp + Memori (RAM & ROM) + I/O Port + Programmable IC Mikrokontroler digunakan sebagai komponen pengendali
MIKROKONTROLER Arsitektur Mikrokontroler AT89S51 Ringkasan Pendahuluan Mikrokontroler Mikrokontroler = µp + Memori (RAM & ROM) + I/O Port + Programmable IC Mikrokontroler digunakan sebagai komponen pengendali
BAB II DASAR TEORI. 2.1 Ethanol
 BAB II DASAR TEORI 2.1 Ethanol Ethanol yang kita kenal dengan sebutan alkohol adalah hasil fermentasi dari tetes tebu. Dari proses fermentasi akan menghasilkan ethanol dengan kadar 11 12 %. Dan untuk menghasilkan
BAB II DASAR TEORI 2.1 Ethanol Ethanol yang kita kenal dengan sebutan alkohol adalah hasil fermentasi dari tetes tebu. Dari proses fermentasi akan menghasilkan ethanol dengan kadar 11 12 %. Dan untuk menghasilkan
BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]
![BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]](/thumbs/58/42409134.jpg "BAB II DASAR TEORI. Gambar 2.1 Sensor MLX 90614[5]") BAB II DASAR TEORI Dalam bab ini dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan skripsi yang dibuat. Teori-teori yang digunakan dalam pembuatan skripsi ini adalah sensor
BAB II DASAR TEORI Dalam bab ini dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan skripsi yang dibuat. Teori-teori yang digunakan dalam pembuatan skripsi ini adalah sensor
BAB II KONSEP DASAR PERANCANGAN
 BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari alat akuisisi data termokopel 8 kanal. 3.1. Gambaran Sistem Alat yang direalisasikan
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari alat akuisisi data termokopel 8 kanal. 3.1. Gambaran Sistem Alat yang direalisasikan
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perangkat keras dan perangkat lunak sitem yang digunakan dalam pembuatan tugas akhir. Berikut adalah diagram block alat yang digunakan dalam
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perangkat keras dan perangkat lunak sitem yang digunakan dalam pembuatan tugas akhir. Berikut adalah diagram block alat yang digunakan dalam
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI Pada bab ini akan dibahas teori-teori dasar yang digunakan untuk merealisasikan suatu sistem penjejak obyek bergerak. 2.1 Citra Digital Citra adalah suatu representasi (gambaran),
BAB II LANDASAN TEORI Pada bab ini akan dibahas teori-teori dasar yang digunakan untuk merealisasikan suatu sistem penjejak obyek bergerak. 2.1 Citra Digital Citra adalah suatu representasi (gambaran),
BAB III TEORI PENUNJANG. dihapus berulang kali dengan menggunakan software tertentu. IC ini biasanya
 BAB III TEORI PENUNJANG 3.1 Mikrokontroler ATmega8535 Mikrokontroler adalah IC (Integrated Circuit) yang dapat di program dan dihapus berulang kali dengan menggunakan software tertentu. IC ini biasanya
BAB III TEORI PENUNJANG 3.1 Mikrokontroler ATmega8535 Mikrokontroler adalah IC (Integrated Circuit) yang dapat di program dan dihapus berulang kali dengan menggunakan software tertentu. IC ini biasanya
BAB 2 LANDASAN TEORI
 BAB 2 LANDASAN TEORI 2.1 Mikrokontroler Atmega8535 Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus (Agus Bejo, 2007). Biasanya digunakan untuk pengontrolan otomatis
BAB 2 LANDASAN TEORI 2.1 Mikrokontroler Atmega8535 Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus (Agus Bejo, 2007). Biasanya digunakan untuk pengontrolan otomatis
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Mikrokontroller ATMEGA 8535 Mikrokontroller merupakan sebuah single chip yang didalamnya telah dilengkapi dengan CPU (Central Processing Unit), RAM (Random Acces Memory), ROM
BAB II LANDASAN TEORI 2.1 Mikrokontroller ATMEGA 8535 Mikrokontroller merupakan sebuah single chip yang didalamnya telah dilengkapi dengan CPU (Central Processing Unit), RAM (Random Acces Memory), ROM
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Teori Dasar Mikrokontroller ATMega8535 Perkembangan teknologi telah maju dengan pesat dalam perkembangan dunia elektronika, khususnya dunia mikroelektronika. Penemuan silicon
BAB II LANDASAN TEORI 2.1 Teori Dasar Mikrokontroller ATMega8535 Perkembangan teknologi telah maju dengan pesat dalam perkembangan dunia elektronika, khususnya dunia mikroelektronika. Penemuan silicon
BAB II TINJAUAN PUSTAKA. [10]. Dengan pengujian hanya terbatas pada remaja dan didapatkan hasil rata-rata
![BAB II TINJAUAN PUSTAKA. [10]. Dengan pengujian hanya terbatas pada remaja dan didapatkan hasil rata-rata](/thumbs/78/77792009.jpg "BAB II TINJAUAN PUSTAKA. [10]. Dengan pengujian hanya terbatas pada remaja dan didapatkan hasil rata-rata") BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Sebelumnya pernah dilakukan penelitian terkait dengan alat uji kekuatan gigit oleh Noviyani Agus dari Poltekkes Surabaya pada tahun 2006 dengan judul penelitian
BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Sebelumnya pernah dilakukan penelitian terkait dengan alat uji kekuatan gigit oleh Noviyani Agus dari Poltekkes Surabaya pada tahun 2006 dengan judul penelitian
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB III PERANCANGAN SISTEM Pada bab ini akan dibahas mengenai perancangan dan realisasi dari perangkat keras maupun perangkat lunak dari setiap modul yang dipakai pada skripsi ini. 3.1. Perancangan dan
BAB II TINJAUAN PUSTAKA. yang telah membuat Data Logger Autoclave, prinsip kerja alat ini adalah pada
 4 BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Pada penelitian yang telah dilakukan oleh Dwinta Mussetyarsih (2014) yang telah membuat Data Logger Autoclave, prinsip kerja alat ini adalah pada saat
4 BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Pada penelitian yang telah dilakukan oleh Dwinta Mussetyarsih (2014) yang telah membuat Data Logger Autoclave, prinsip kerja alat ini adalah pada saat
MIKROKONTROLER Yoyo Somantri dan Egi Jul Kurnia
 MIKROKONTROLER Yoyo Somantri dan Egi Jul Kurnia Mikrokontroler Mikrokontroler adalah sistem komputer yang dikemas dalam sebuah IC. IC tersebut mengandung semua komponen pembentuk komputer seperti CPU,
MIKROKONTROLER Yoyo Somantri dan Egi Jul Kurnia Mikrokontroler Mikrokontroler adalah sistem komputer yang dikemas dalam sebuah IC. IC tersebut mengandung semua komponen pembentuk komputer seperti CPU,
BAB II DASAR TEORI (2.1) = l t. s rata-rata
 = l t. s rata-rata") BAB II DASAR TEORI Pada bab ini dibahas teori-teori penunjang yang digunakan sebagai pedoman dalam merancang dan merealisasikan skripsi ini. Teori-teori yang digunakan untuk merealisasikan skripsi ini
BAB II DASAR TEORI Pada bab ini dibahas teori-teori penunjang yang digunakan sebagai pedoman dalam merancang dan merealisasikan skripsi ini. Teori-teori yang digunakan untuk merealisasikan skripsi ini
DAFTAR ISI LEMBAR PENGESAHAN... LEMBAR PERSETUJUAN... PERNYATAAN KEASLIAN... ABSTRAK... ABSTRACT... KATA PENGANTAR... vii DAFTAR ISI...
 DAFTAR ISI LEMBAR PENGESAHAN... LEMBAR PERSETUJUAN... PERNYATAAN KEASLIAN... ABSTRAK... ABSTRACT... i ii iv v vi KATA PENGANTAR... vii DAFTAR ISI... ix DAFTAR GAMBAR... xii DAFTAR TABEL... xiv DAFTAR SINGKATAN...
DAFTAR ISI LEMBAR PENGESAHAN... LEMBAR PERSETUJUAN... PERNYATAAN KEASLIAN... ABSTRAK... ABSTRACT... i ii iv v vi KATA PENGANTAR... vii DAFTAR ISI... ix DAFTAR GAMBAR... xii DAFTAR TABEL... xiv DAFTAR SINGKATAN...
Gambar 2.7. Susunan pin mikrokontroler ATMega8535 Berikut ini adalah tabel penjelasan mengenai pin yang terdapat pada mikrokontroler ATMega8535:
 11 9. RAM Internal 128 X 8 bit, 10. Memiliki 32 jalur I/O yang dapat diprogram, 11. Satu pencacah 8 bit dengan separate prescaler, 12. Satu pencacah16 bit dengan separate prescaler, 13. Sumber interupsi
11 9. RAM Internal 128 X 8 bit, 10. Memiliki 32 jalur I/O yang dapat diprogram, 11. Satu pencacah 8 bit dengan separate prescaler, 12. Satu pencacah16 bit dengan separate prescaler, 13. Sumber interupsi
II. TINJAUAN PUSTAKA. Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR
 II. TINJAUAN PUSTAKA A. Mikrokontroler ATmega8535 Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR (Alf and Vegard s Risc Processor) yang diproduksi oleh Atmel Corporation.
II. TINJAUAN PUSTAKA A. Mikrokontroler ATmega8535 Mikrokontroler ATmega8535 merupakan salah satu jenis mikrokontroler keluarga AVR (Alf and Vegard s Risc Processor) yang diproduksi oleh Atmel Corporation.
II. TINJAUAN PUSTAKA. kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
 II. TINJAUAN PUSTAKA A. Temperatur dan Kelembaban Temperatur dan kelembaban merupakan aspek yang penting dalam menentukan kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
II. TINJAUAN PUSTAKA A. Temperatur dan Kelembaban Temperatur dan kelembaban merupakan aspek yang penting dalam menentukan kondisi cuaca pada suatu daerah. Banyak hal yang sangat bergantung pada kondisi
BAB II LANDASAN TEORI. pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system.
 BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
TKC210 - Teknik Interface dan Peripheral. Eko Didik Widianto
 TKC210 - Teknik Interface dan Peripheral Eko Didik Sistem Komputer - Universitas Diponegoro Review Kuliah Pembahasan tentang: Referensi: mikrokontroler (AT89S51) mikrokontroler (ATMega32A) Sumber daya
TKC210 - Teknik Interface dan Peripheral Eko Didik Sistem Komputer - Universitas Diponegoro Review Kuliah Pembahasan tentang: Referensi: mikrokontroler (AT89S51) mikrokontroler (ATMega32A) Sumber daya
BAB II LANDASAN TEORI. ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc
 BAB II LANDASAN TEORI 2.1. Mikrokontroller ATMega 8535 ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc Processor) keluarga ATMega. Mikrokontroller AVR memiliki arsitektur 8 bit, dimana
BAB II LANDASAN TEORI 2.1. Mikrokontroller ATMega 8535 ATMega 8535 adalah mikrokontroller kelas AVR (Alf and Vegard s Risc Processor) keluarga ATMega. Mikrokontroller AVR memiliki arsitektur 8 bit, dimana
bagian penting yaitu sensor navigasi CMPS03, sensor tekanan, IC suara 25120,
 BAB II STUDI PUSTAKA 2.1 Tinjauan Pustaka Sugiarto indar, 2004 telah melakukan penelitian tentang kompas magnetik dengan output LCD. Diagram alir sistem «Kompas Magnetik Digital dengan Output LCD " adalah
BAB II STUDI PUSTAKA 2.1 Tinjauan Pustaka Sugiarto indar, 2004 telah melakukan penelitian tentang kompas magnetik dengan output LCD. Diagram alir sistem «Kompas Magnetik Digital dengan Output LCD " adalah
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1. Sistem Minimum AVR USB Sistem minimum ATMega 8535 yang didesain sesederhana mungkin yang memudahkan dalam belajar mikrokontroller AVR tipe 8535, dilengkapi internal downloader
BAB II LANDASAN TEORI 2.1. Sistem Minimum AVR USB Sistem minimum ATMega 8535 yang didesain sesederhana mungkin yang memudahkan dalam belajar mikrokontroller AVR tipe 8535, dilengkapi internal downloader
BAB II LANDASAN TEORI
 16 BAB II LANDASAN TEORI 2.1. Sensor Optocoupler Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter dan receiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya
16 BAB II LANDASAN TEORI 2.1. Sensor Optocoupler Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter dan receiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya
BAB III PERANCANGAN ALAT. dibuat. Gambar 3.1. menunjukkan blok diagram alat secara keseluruhan.
 BAB III PERANCANGAN ALAT Bab ini akan membahas mengenai perancangan alat dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung keseluruhan alat yang dibuat. Gambar 3.1. menunjukkan
BAB III PERANCANGAN ALAT Bab ini akan membahas mengenai perancangan alat dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung keseluruhan alat yang dibuat. Gambar 3.1. menunjukkan
BAB II DASAR TEORI. Inkubator bayi adalah alat yang digunakan untuk mempertahankan kondisi
 BAB II DASAR TEORI 2.1. Inkubator Bayi Inkubator bayi adalah alat yang digunakan untuk mempertahankan kondisi lingkungan yang cocok untuk bayi baru lahir, terutama pada kelahiran prematur. Saat ini masalah
BAB II DASAR TEORI 2.1. Inkubator Bayi Inkubator bayi adalah alat yang digunakan untuk mempertahankan kondisi lingkungan yang cocok untuk bayi baru lahir, terutama pada kelahiran prematur. Saat ini masalah
APLIKASI CHATTING DENGAN JARINGAN MIKROKONTROLER Eka Purwa Laksana, Sujono
 APLIKASI CHATTING DENGAN JARINGAN MIKROKONTROLER Eka Purwa Laksana, Sujono Program Studi Teknik Elektro, Fakultas Teknik, Universitas Budi Luhur Jl. Ciledug Raya Petukangan Utara Jakarta Selatan 12260
APLIKASI CHATTING DENGAN JARINGAN MIKROKONTROLER Eka Purwa Laksana, Sujono Program Studi Teknik Elektro, Fakultas Teknik, Universitas Budi Luhur Jl. Ciledug Raya Petukangan Utara Jakarta Selatan 12260
BAB 3 PERANCANGAN SISTEM. Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat
 BAB 3 PERANCANGAN SISTEM Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat pengukur tinggi bensin pada reservoir SPBU. Dalam membuat suatu sistem harus dilakukan analisa mengenai
BAB 3 PERANCANGAN SISTEM Bab ini akan membahas tentang perancangan sistem yang digunakan dari alat pengukur tinggi bensin pada reservoir SPBU. Dalam membuat suatu sistem harus dilakukan analisa mengenai
BAB 3: PERANCANGAN DAN SISTEM KERJA RANGKAIAN. Bab ini membahas tentang perencanaan dan pembuatan sistem secara
 Untuk mempermudah penulisan tugas akhir ini, penulis membuat suatu sistematika penulisan yang terdiri dari : BAB 1: PENDAHULUAN Bab ini akan membahas latar belakang tugas akhir, identifikasi masalah, batasan
Untuk mempermudah penulisan tugas akhir ini, penulis membuat suatu sistematika penulisan yang terdiri dari : BAB 1: PENDAHULUAN Bab ini akan membahas latar belakang tugas akhir, identifikasi masalah, batasan
BAB III RANCANG BANGUN SISTEM KARAKTERISASI LED. Rancangan sistem karakterisasi LED diperlihatkan pada blok diagram Gambar
 BAB III RANCANG BANGUN SISTEM KARAKTERISASI LED 3.1. Rancang Bangun Perangkat Keras Rancangan sistem karakterisasi LED diperlihatkan pada blok diagram Gambar 3.1. Sistem ini terdiri dari komputer, antarmuka
BAB III RANCANG BANGUN SISTEM KARAKTERISASI LED 3.1. Rancang Bangun Perangkat Keras Rancangan sistem karakterisasi LED diperlihatkan pada blok diagram Gambar 3.1. Sistem ini terdiri dari komputer, antarmuka
BAB II DASAR TEORI. AVR(Alf and Vegard s Risc processor) ATMega32 merupakan 8 bit mikrokontroler berteknologi RISC (Reduce Instruction Set Computer).
 ATMega32 merupakan 8 bit mikrokontroler berteknologi RISC (Reduce Instruction Set Computer).") BAB II DASAR TEORI Bab ini menjelaskan konsep dan teori dasar yang mendukung perancangan dan realisasi sistem. Penjelasan ini meliputi mikrokontroler AVR, perangkat sensor, radio frequency, RTC (Real Time
BAB II DASAR TEORI Bab ini menjelaskan konsep dan teori dasar yang mendukung perancangan dan realisasi sistem. Penjelasan ini meliputi mikrokontroler AVR, perangkat sensor, radio frequency, RTC (Real Time
BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN
 BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN Konsep dasar sistem monitoring tekanan ban pada sepeda motor secara nirkabel ini terdiri dari modul sensor yang terpasang pada tutup pentil ban sepeda
BAB II KONSEP DASAR SISTEM MONITORING TEKANAN BAN Konsep dasar sistem monitoring tekanan ban pada sepeda motor secara nirkabel ini terdiri dari modul sensor yang terpasang pada tutup pentil ban sepeda
BAB II LANDASAN TEORI. merealisasikan suatu alat pengawas kecepatan pada forklift berbasis mikrokontroler.
 BAB II LANDASAN TEORI Pada bab ini penulis akan membahas teori teori dasar yang digunakan untuk merealisasikan suatu alat pengawas kecepatan pada forklift berbasis mikrokontroler. 2.1 Gerak Melingkar Beraturan
BAB II LANDASAN TEORI Pada bab ini penulis akan membahas teori teori dasar yang digunakan untuk merealisasikan suatu alat pengawas kecepatan pada forklift berbasis mikrokontroler. 2.1 Gerak Melingkar Beraturan
BAB II LANDASAN TEORI. 2.1 Pengaruh Tekanan Udara (Atmosfer) Terhadap Cuaca dan Penerbangan
 Terhadap Cuaca dan Penerbangan") BAB II LANDASAN TEORI 2.1 Pengaruh Tekanan Udara (Atmosfer) Terhadap Cuaca dan Penerbangan Tekanan udara (atmosfer) pada suatu permukaan adalah gaya yang diberikan kepada suatu permukaan atau area oleh
BAB II LANDASAN TEORI 2.1 Pengaruh Tekanan Udara (Atmosfer) Terhadap Cuaca dan Penerbangan Tekanan udara (atmosfer) pada suatu permukaan adalah gaya yang diberikan kepada suatu permukaan atau area oleh
BAB II DASAR TEORI Bentuk Fisik Sensor Gas LPG TGS 2610 Bentuk fisik sensor TGS 2610 terlihat pada gambar berikut :
 BAB II DASAR TEORI 2.1 SENSOR TGS 2610 2.1.1 Gambaran Umum Sensor gas LPG TGS 2610 adalah sebuah sensor gas yang dapat mendeteksi adanya konsentrasi gas LPG di sekitar sensor tersebut. Sensor gas LPG TGS
BAB II DASAR TEORI 2.1 SENSOR TGS 2610 2.1.1 Gambaran Umum Sensor gas LPG TGS 2610 adalah sebuah sensor gas yang dapat mendeteksi adanya konsentrasi gas LPG di sekitar sensor tersebut. Sensor gas LPG TGS
BAB IV HASIL DAN PEMBAHASAN. Setelah pembuatan modul maka perlu dilakukan pendataan melalui proses
 BAB IV HASIL DAN PEMBAHASAN 4.1 Pengujian Dan Pengukuran Setelah pembuatan modul maka perlu dilakukan pendataan melalui proses pengujian dan pengukuran. Tujuan dari pengujian dan pengukuran yaitu mengetahui
BAB IV HASIL DAN PEMBAHASAN 4.1 Pengujian Dan Pengukuran Setelah pembuatan modul maka perlu dilakukan pendataan melalui proses pengujian dan pengukuran. Tujuan dari pengujian dan pengukuran yaitu mengetahui
BAB II TINJAUAN PUSTAKA. informasi dari peneliti-peneliti sebelumnya sebagai bahan perbandingan,
 5 BAB II TINJAUAN PUSTAKA 2.1. Penelitian Terdahulu Dalam penulisan Karya Ilmiah ini, penulis meneliti dan menggali informasi dari peneliti-peneliti sebelumnya sebagai bahan perbandingan, baik mengenai
5 BAB II TINJAUAN PUSTAKA 2.1. Penelitian Terdahulu Dalam penulisan Karya Ilmiah ini, penulis meneliti dan menggali informasi dari peneliti-peneliti sebelumnya sebagai bahan perbandingan, baik mengenai
MENGENAL MIKROKONTROLER ATMEGA-16
 MENGENAL MIKROKONTROLER ATMEGA-16 AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus
MENGENAL MIKROKONTROLER ATMEGA-16 AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Microcontroller AVR ATmega32 Microcontroller adalah sebuah alat pengendali (controller) berukuran mikro atau sangat kecil yang dikemas dalam bentuk chip 1. Microcontroller data
BAB II TINJAUAN PUSTAKA 2.1 Microcontroller AVR ATmega32 Microcontroller adalah sebuah alat pengendali (controller) berukuran mikro atau sangat kecil yang dikemas dalam bentuk chip 1. Microcontroller data
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1 Mikrokontroler Mikrokontroler berbentuk sebuah chip yang fungsinya dapat dianalogikan dengan sebuah komputer. Karena di dalamnya sudah terdapat kebutuhan minimal agar mikroprosesor
BAB II LANDASAN TEORI 2.1 Mikrokontroler Mikrokontroler berbentuk sebuah chip yang fungsinya dapat dianalogikan dengan sebuah komputer. Karena di dalamnya sudah terdapat kebutuhan minimal agar mikroprosesor
LANDASAN TEORI BAB II
 4 BAB II LANDASAN TEORI 2.1.Pengertian suhu dan kelembaban Suhu atau temperatur udara adalah derajat panas dari aktivitas molekul dalam atmosfer. Alat untuk mengukur suhu atau temperatur udara atau derajat
4 BAB II LANDASAN TEORI 2.1.Pengertian suhu dan kelembaban Suhu atau temperatur udara adalah derajat panas dari aktivitas molekul dalam atmosfer. Alat untuk mengukur suhu atau temperatur udara atau derajat
BAB II LANDASAN TEORI
 5 BAB II LANDASAN TEORI 2. 1 Mikrokontroler AVR Pada saat ini penggunaan mikrokontroler daapt kita temui pada berbagai peralatan, misalnya peralatan yang terdapat dirumah tangga, seperti handphone, microwave
5 BAB II LANDASAN TEORI 2. 1 Mikrokontroler AVR Pada saat ini penggunaan mikrokontroler daapt kita temui pada berbagai peralatan, misalnya peralatan yang terdapat dirumah tangga, seperti handphone, microwave
BAB II DASAR TEORI Sensor Akselerometer ADXL345
 BAB II DASAR TEORI Pada bab ini akan dibahas dasar teori penunjang sebagai pedoman dalam merancang dan merealisasikan skripsi ini. Teori-teori yang digunakan antara lain sensor akselerometer ADXL345, sensor
BAB II DASAR TEORI Pada bab ini akan dibahas dasar teori penunjang sebagai pedoman dalam merancang dan merealisasikan skripsi ini. Teori-teori yang digunakan antara lain sensor akselerometer ADXL345, sensor
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Sensor Warna TCS230 Sensor warna TCS230 adalah sensor warna yang sering digunakan pada aplikasi mikrokontroler untuk pendeteksian suatu object benda atau warna sari object yang
BAB II TINJAUAN PUSTAKA 2.1 Sensor Warna TCS230 Sensor warna TCS230 adalah sensor warna yang sering digunakan pada aplikasi mikrokontroler untuk pendeteksian suatu object benda atau warna sari object yang
BAB II TINJAUAN PUSTAKA
 5 BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Pertumbuhan adalah perubahan secara fisiologis sebagai hasil dari proses pematangan fungsi-fungsi fisik yang berlangsung secara normal pada anak yang
5 BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Pertumbuhan adalah perubahan secara fisiologis sebagai hasil dari proses pematangan fungsi-fungsi fisik yang berlangsung secara normal pada anak yang
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Sensor Sensor adalah sesuatu yang digunakan untuk mendeteksi adanya perubahan lingkungan fisik atau kimia. Variabel keluaran dari sensor yang diubah menjadi besaran listrik
BAB II TINJAUAN PUSTAKA 2.1 Sensor Sensor adalah sesuatu yang digunakan untuk mendeteksi adanya perubahan lingkungan fisik atau kimia. Variabel keluaran dari sensor yang diubah menjadi besaran listrik
III. METODE PENELITIAN. Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu
 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung pada tanggal 4 Juni 2013 hingga 23 September 2014.
III. METODE PENELITIAN A. Waktu dan Tempat Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu Teknik Elektro Universitas Lampung pada tanggal 4 Juni 2013 hingga 23 September 2014.
BAB 2 TINJAUAN TEORI
 BAB 2 TINJAUAN TEORI 2.1 Sensor Accelerometer Percepatan merupakan suatu keadaan berubahnya kecepatan terhadap waktu. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga percepatan (acceleration).
BAB 2 TINJAUAN TEORI 2.1 Sensor Accelerometer Percepatan merupakan suatu keadaan berubahnya kecepatan terhadap waktu. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga percepatan (acceleration).
BAB II TINJAUAN PUSTAKA. Menurut Nanda Yudip (2012) Pengguna terapi inhalasi sangat luas di
 Pengguna terapi inhalasi sangat luas di") BAB II TINJAUAN PUSTAKA 2.1 DASAR TEORI 2.1.1 Terapi Inhalasi Terapi inhalasi adalah pemberian obat yang dilakukan secara inhalasi (hirupan) ke dalam saluran respiratorik atau saluran pernapasan. Menurut
BAB II TINJAUAN PUSTAKA 2.1 DASAR TEORI 2.1.1 Terapi Inhalasi Terapi inhalasi adalah pemberian obat yang dilakukan secara inhalasi (hirupan) ke dalam saluran respiratorik atau saluran pernapasan. Menurut
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI Pada bab ini akan dijelaskan mengenai dasar teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem. Dasar teori yang digunakan dalam merealisasikan sistem ini antara
BAB II LANDASAN TEORI Pada bab ini akan dijelaskan mengenai dasar teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem. Dasar teori yang digunakan dalam merealisasikan sistem ini antara
BAB 2 DASAR TEORI. Gambar 2.1 Sensor SHT-11
 BAB 2 DASAR TEORI 2.1 Perangkat Keras Perangkat keras merupakan bentuk fisik dari alat pengukur suhu dan kelembaban yang terdiri dari modul SHT-11, sistem minimum Atmega8, LCD display M1632. 2.1.1 SHT-11
BAB 2 DASAR TEORI 2.1 Perangkat Keras Perangkat keras merupakan bentuk fisik dari alat pengukur suhu dan kelembaban yang terdiri dari modul SHT-11, sistem minimum Atmega8, LCD display M1632. 2.1.1 SHT-11
III. METODOLOGI PENELITIAN. Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009
 III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
III. METODOLOGI PENELITIAN A. Waktu dan Tempat Penelitian Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Juli 2009 dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium
RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535
 RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535 Masriadi dan Frida Agung Rakhmadi Program Studi Fisika Fakultas Sains dan Teknologi UIN Sunan Kalijaga Jl. Marsda
RANCANGAN SISTEM PARKIR TERPADU BERBASIS SENSOR INFRA MERAH DAN MIKROKONTROLER ATMega8535 Masriadi dan Frida Agung Rakhmadi Program Studi Fisika Fakultas Sains dan Teknologi UIN Sunan Kalijaga Jl. Marsda
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.1. Karbon Monoksida (CO) Karbon monoksida merupakan gas yang tidak berwarna, tidak berbau, tidak berasa, tidak mudah larut dalam air, tidak menyebabkan iritasi, beracun dan berbahaya
BAB II LANDASAN TEORI 2.1. Karbon Monoksida (CO) Karbon monoksida merupakan gas yang tidak berwarna, tidak berbau, tidak berasa, tidak mudah larut dalam air, tidak menyebabkan iritasi, beracun dan berbahaya
BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS
 BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS 3.1. Pendahuluan Perangkat pengolah sinyal yang dikembangkan pada tugas sarjana ini dirancang dengan tiga kanal masukan. Pada perangkat pengolah sinyal
BAB III PERANCANGAN DAN PEMBUATAN PERANGKAT KERAS 3.1. Pendahuluan Perangkat pengolah sinyal yang dikembangkan pada tugas sarjana ini dirancang dengan tiga kanal masukan. Pada perangkat pengolah sinyal
PENGATURAN LAMPU LALU LINTAS BERBASIS MIKROKONTROLER ATMEGA8535
 PENGATURAN LAMPU LALU LINTAS BERBASIS MIKROKONTROLER ATMEGA8535 Alamsyah* * Abstract It has built a simulator traffic lights to set the length of time the light is green, yellow, and red on a two-way street.
PENGATURAN LAMPU LALU LINTAS BERBASIS MIKROKONTROLER ATMEGA8535 Alamsyah* * Abstract It has built a simulator traffic lights to set the length of time the light is green, yellow, and red on a two-way street.
BAB II DASAR TEORI. tertarik dalam menciptakan objek atau lingkungan yang interaktif.
 BAB II DASAR TEORI 2.1 Karakteristik Ikan Karakteristik ikan yang dapat dihitung ialah ikan yang dapat hidup di berbagai lingkungan air tawar, misalnya ikan lele. Ikan lele hidup di air tawar, tahan penyakit,
BAB II DASAR TEORI 2.1 Karakteristik Ikan Karakteristik ikan yang dapat dihitung ialah ikan yang dapat hidup di berbagai lingkungan air tawar, misalnya ikan lele. Ikan lele hidup di air tawar, tahan penyakit,
BAB II KONSEP DASAR SISTEM PENGONTROL PARTITUR OTOMATIS
 BAB II KONSEP DASAR SISTEM PENGONTROL PARTITUR OTOMATIS Pada BAB II ini akan dibahas gambaran cara kerja sistem dari alat yang dibuat serta komponen-komponen yang digunakan untuk pembentuk sistem. Pada
BAB II KONSEP DASAR SISTEM PENGONTROL PARTITUR OTOMATIS Pada BAB II ini akan dibahas gambaran cara kerja sistem dari alat yang dibuat serta komponen-komponen yang digunakan untuk pembentuk sistem. Pada
BAB II TEORI PENUNJANG
 BAB II TEORI PENUNJANG 2.1 Pengertian Shalat Jumat Dalam kehidupan umat Islam, dalam satu minggu terdapat satu hari dimana orang Islam laki-laki diwajibkan untuk menjalankan shalat berjamaah di Masjid
BAB II TEORI PENUNJANG 2.1 Pengertian Shalat Jumat Dalam kehidupan umat Islam, dalam satu minggu terdapat satu hari dimana orang Islam laki-laki diwajibkan untuk menjalankan shalat berjamaah di Masjid
BAB II TEORI. Gambar 2.1. GP2Y1010AU0F Optical Dust Sensor
 BAB II TEORI 2.1. GP2Y1010AU0F Optical Dust Sensor GP2Y1010AU0F Optical Dust Sensor ialah sensor debu yang berbasis inframerah. Sensor ini sangat efektif dalam mendeteksi partikel yang sangat halus seperti
BAB II TEORI 2.1. GP2Y1010AU0F Optical Dust Sensor GP2Y1010AU0F Optical Dust Sensor ialah sensor debu yang berbasis inframerah. Sensor ini sangat efektif dalam mendeteksi partikel yang sangat halus seperti
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Bab ini akan membahas mengenai perancangan sistem dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung keseluruhan sistem yang dibuat. Gambar 3.1
BAB III PERANCANGAN SISTEM Bab ini akan membahas mengenai perancangan sistem dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung keseluruhan sistem yang dibuat. Gambar 3.1
BAB III PERANCANGAN DAN REALISASI ALAT
 BAB III PERANCANGAN DAN REALISASI ALAT Pada bab ini akan dibahas mengenai perancangan sistem dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung alat secara keseluruhan.
BAB III PERANCANGAN DAN REALISASI ALAT Pada bab ini akan dibahas mengenai perancangan sistem dan realisasi perangkat keras dan perangkat lunak dari setiap modul yang mendukung alat secara keseluruhan.
BAB II LANDASAN TEORI. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam
 BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
BAB II LANDASAN TEORI Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan
BAB III PERANCANGAN ALAT SIMULASI PEGENDALI LAMPU JARAK JAUH DAN DEKAT PADA KENDARAAN SECARA OTOMATIS
 BAB III PERANCANGAN ALAT SIMULASI PEGENDALI LAMPU JARAK JAUH DAN DEKAT PADA KENDARAAN SECARA OTOMATIS Pada bab ini menjelaskan tentang perancangan dan pembuatan alat simulasi Sistem pengendali lampu jarak
BAB III PERANCANGAN ALAT SIMULASI PEGENDALI LAMPU JARAK JAUH DAN DEKAT PADA KENDARAAN SECARA OTOMATIS Pada bab ini menjelaskan tentang perancangan dan pembuatan alat simulasi Sistem pengendali lampu jarak
BAB II LANDASAN TEORI. berinteraksi dengan mudah dan interaksi dengan masyarakat umum juga menjadi
 BAB II LANDASAN TEORI 2.1 Bahasa Isyarat Abjad Bahasa isyarat adalah media komunikasi bagi para penderita tuna-rungu agar dapat berinteraksi dengan para penderita tuna-rungu lainnya dan manusia normal,
BAB II LANDASAN TEORI 2.1 Bahasa Isyarat Abjad Bahasa isyarat adalah media komunikasi bagi para penderita tuna-rungu agar dapat berinteraksi dengan para penderita tuna-rungu lainnya dan manusia normal,
Sistem Tertanam. Pengantar Atmega328 dan Arduino Uno. Dennis Christie - Universitas Gunadarma
 Sistem Tertanam Pengantar Atmega328 dan Arduino Uno 1 Arsitektur Atmega328 Prosesor atau mikroprosesor adalah suatu perangkat digital berupa Chip atau IC (Integrated Circuit) yang digunakan untuk memproses
Sistem Tertanam Pengantar Atmega328 dan Arduino Uno 1 Arsitektur Atmega328 Prosesor atau mikroprosesor adalah suatu perangkat digital berupa Chip atau IC (Integrated Circuit) yang digunakan untuk memproses
SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8
 SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8 I Nyoman Benny Rismawan 1, Cok Gede Indra Partha 2, Yoga Divayana 3 Jurusan Teknik Elektro, Fakultas Teknik Universitas
SELF-STABILIZING 2-AXIS MENGGUNAKAN ACCELEROMETER ADXL345 BERBASIS MIKROKONTROLER ATmega8 I Nyoman Benny Rismawan 1, Cok Gede Indra Partha 2, Yoga Divayana 3 Jurusan Teknik Elektro, Fakultas Teknik Universitas
BAB III METODE PENELITIAN. Pada pengerjaan tugas akhir ini metode penelitian yang dilakukan yaitu. dengan penelitian yang dilakukan.
 BAB III METODE PENELITIAN 3.1. METODE PENELITIAN Pada pengerjaan tugas akhir ini metode penelitian yang dilakukan yaitu sebagai berikut : Studi literatur, yaitu dengan mempelajari beberapa referensi yang
BAB III METODE PENELITIAN 3.1. METODE PENELITIAN Pada pengerjaan tugas akhir ini metode penelitian yang dilakukan yaitu sebagai berikut : Studi literatur, yaitu dengan mempelajari beberapa referensi yang
Pada dasamya prinsip dasamya prinsip kerja dari alat ini adalah dengan
 BAB II STUDI PUSTAKA 2.1 Studi Pustaka Penelitian tentang pembuatan alat ukur digital pernah dilakukan Untung Firdaus dengan nomor mahasiswa 00524044 dengan judul tugas akhir " Pembuatan Alat Ukur Jarak
BAB II STUDI PUSTAKA 2.1 Studi Pustaka Penelitian tentang pembuatan alat ukur digital pernah dilakukan Untung Firdaus dengan nomor mahasiswa 00524044 dengan judul tugas akhir " Pembuatan Alat Ukur Jarak
Blok sistem mikrokontroler MCS-51 adalah sebagai berikut.
 Arsitektur mikrokontroler MCS-51 diotaki oleh CPU 8 bit yang terhubung melalui satu jalur bus dengan memori penyimpanan berupa RAM dan ROM serta jalur I/O berupa port bit I/O dan port serial. Selain itu
Arsitektur mikrokontroler MCS-51 diotaki oleh CPU 8 bit yang terhubung melalui satu jalur bus dengan memori penyimpanan berupa RAM dan ROM serta jalur I/O berupa port bit I/O dan port serial. Selain itu
BAB III TEORI PENUNJANG. komunikasi data serial secara UART RS-232 serta pemrograman memori melalui
 BAB III TEORI PENUNJANG Pada bab tiga penulis menjelaskan tentang teori penunjang kerja praktek yang telah dikerjakan. 3.1 DT AVR Low Cost Micro System DT AVR Low Cost Micro System merupakan sebuah modul
BAB III TEORI PENUNJANG Pada bab tiga penulis menjelaskan tentang teori penunjang kerja praktek yang telah dikerjakan. 3.1 DT AVR Low Cost Micro System DT AVR Low Cost Micro System merupakan sebuah modul
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI 2.2.1.1 Sensor Load Cell Prinsip kerja dari sensor tekanan ini adalah mengubah tegangan mekanis menjadi sinyal listrik. Ukuran ketegangan didasarkan pada prinsip bahwa tahanan pengantar
BAB II LANDASAN TEORI 2.2.1.1 Sensor Load Cell Prinsip kerja dari sensor tekanan ini adalah mengubah tegangan mekanis menjadi sinyal listrik. Ukuran ketegangan didasarkan pada prinsip bahwa tahanan pengantar
BAB IV PERANCANGAN DAN PEMBUATAN ALAT UKUR TEMPERATUR BERBASIS MIKROKONTROLER
 BAB IV PERANCANGAN DAN PEMBUATAN ALAT UKUR TEMPERATUR BERBASIS MIKROKONTROLER Pada bab ini akan dibahas mengenai perancangan dan pembuatan alat ukur temperatur berbasis mikrokontroler. Pembuatan alat ukur
BAB IV PERANCANGAN DAN PEMBUATAN ALAT UKUR TEMPERATUR BERBASIS MIKROKONTROLER Pada bab ini akan dibahas mengenai perancangan dan pembuatan alat ukur temperatur berbasis mikrokontroler. Pembuatan alat ukur
BAB III PERANCANGAN SISTEM. sebuah alat pemroses data yang sama, ruang kerja yang sama sehingga
 BAB III PERANCANGAN SISTEM 3.1. Blok Diagram Sistem Untuk dapat membandingkan LM35DZ dengan DS18B20 digunakan sebuah alat pemroses data yang sama, ruang kerja yang sama sehingga perbandinganya dapat lebih
BAB III PERANCANGAN SISTEM 3.1. Blok Diagram Sistem Untuk dapat membandingkan LM35DZ dengan DS18B20 digunakan sebuah alat pemroses data yang sama, ruang kerja yang sama sehingga perbandinganya dapat lebih
BAB II LANDASAN TEORI
 BAB II LANDASAN TEORI Pada bab ini akan dibahas dasar teori yang berhubungan dengan perancangan skripsi antara lain pengertian parkir, Piloted parking System, modul bluetooth, mikrokontroler arduino Mega
BAB II LANDASAN TEORI Pada bab ini akan dibahas dasar teori yang berhubungan dengan perancangan skripsi antara lain pengertian parkir, Piloted parking System, modul bluetooth, mikrokontroler arduino Mega
BAB II TINJAUAN PUSTAKA. Pada penelitian sebelumnya sudah dibuat alat monitoring BPM secara
 5 BAB II TINJAUAN PUSTAKA 2.1. Kajian Pustaka Pada penelitian sebelumnya sudah dibuat alat monitoring BPM secara portable karya dari Fahmi Farisandi dengan judul PATIENT DIAGNOSTIC PORTABLE, dari jurusan
5 BAB II TINJAUAN PUSTAKA 2.1. Kajian Pustaka Pada penelitian sebelumnya sudah dibuat alat monitoring BPM secara portable karya dari Fahmi Farisandi dengan judul PATIENT DIAGNOSTIC PORTABLE, dari jurusan
BAB III METODE PENELITIAN. Penelitian ini dilakukan pada bulan Maret 2015 sampai dengan Agustus
 37 BAB III METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian ini dilakukan pada bulan Maret 2015 sampai dengan Agustus 2015. Perancangan dan pembuatan dilaksanakan di laboratorium Elektronika
37 BAB III METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian ini dilakukan pada bulan Maret 2015 sampai dengan Agustus 2015. Perancangan dan pembuatan dilaksanakan di laboratorium Elektronika
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Pengertian Hidroponik Hidroponik merupakan pertanian masa depan sebab hidroponik dapat diusahakan di berbagai tempat, baik di desa, di kota maupun di lahan terbuka, atau di
BAB II TINJAUAN PUSTAKA 2.1 Pengertian Hidroponik Hidroponik merupakan pertanian masa depan sebab hidroponik dapat diusahakan di berbagai tempat, baik di desa, di kota maupun di lahan terbuka, atau di
BAB II TINJAUAN PUSTAKA
 BAB II TINJAUAN PUSTAKA 2.1 Modul Bluetooth HC-05 Bluetooth adalah protokol komunikasi wireless yang bekerja pada frekuensi radio 2.4 GHz untuk pertukaran data pada perangkat bergerak seperti PDA, laptop,
BAB II TINJAUAN PUSTAKA 2.1 Modul Bluetooth HC-05 Bluetooth adalah protokol komunikasi wireless yang bekerja pada frekuensi radio 2.4 GHz untuk pertukaran data pada perangkat bergerak seperti PDA, laptop,
BAB II DASAR TEORI Arduino Mega 2560
 BAB II DASAR TEORI Pada bab ini akan dijelaskan teori-teori penunjang yang diperlukan dalam merancang dan merealisasikan skripsi ini. Bab ini dimulai dari pengenalan singkat dari komponen elektronik utama
BAB II DASAR TEORI Pada bab ini akan dijelaskan teori-teori penunjang yang diperlukan dalam merancang dan merealisasikan skripsi ini. Bab ini dimulai dari pengenalan singkat dari komponen elektronik utama
BAB II TINJAUAN PUSTAKA. alat pengukur waktu expose. Penelitian ini bertujuan mengukur waktu expose
 BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Berdasarkan penelitian yang dilakukan oleh Nanang T ( 2007 ) dengan judul alat pengukur waktu expose. Penelitian ini bertujuan mengukur waktu expose sinar-x
BAB II TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu Berdasarkan penelitian yang dilakukan oleh Nanang T ( 2007 ) dengan judul alat pengukur waktu expose. Penelitian ini bertujuan mengukur waktu expose sinar-x