Rancang Bangun Prototipe Kapal Tanpa Awak Menggunakan Mikrokontroler
|
|
|
- Dewi Sutedja
- 6 tahun lalu
- Tontonan:
Transkripsi




1 Rancang Bangun Prototipe Kapal Tanpa Awak Menggunakan Mikrokontroler Dosen Pembimbing: Suwito, ST., MT. Yoga Uta Nugraha Ainul Khakim Jurusan D3 Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Surabaya


2 Latar Belakang Berdasarkan data KKP (Kementerian Kelautan dan Perikanan), jumlah kapal pengawas perikanan hanya sebanyak 25 kapal sedangkan kebutuhan idealnya adalah sebanyak 80 unit kapal pengawas. Dana yang dikeluarkan untuk biaya operasional BBM dan awak kapal selama 24 kali berlayar dalam satu tahun adalah Rp 1,7 milyar. Berdasarkan database dari Komisi Nasional Keselamatan Transportasi (KNKT) menyebutkan bahwa 41% kecelakaan kapal disebabkan karena faktor human error dari awak kapal.
3 Permasalahan Banyaknya faktor kesalahan manusia dalam mengendalikan di atas kapal. Resiko kecelakaan dan biaya yang tinggi terhadap awak kapal. Diperlukan solusi untuk kontrol jarak jauh kapal tanpa awak sehingga dapat mengurangi resiko kecelakaan dan biaya awak kapal.
4 Relevansi Hasil yang diperoleh dari Tugas Akhir ini diharapkan dapat memberi manfaat, yakni menjadi referensi sistem kendali jarak jauh kapal tanpa awak yang dapat dikendalikan secara manual serta sistem monitoring pengawasan wilayah perairan
5 Batasan Masalah Kontroler yang digunakan akan diprogram pada mikrokontroler AT-Mega 16 dengan Xtal 12 MHz. Bahasa pemrograman yang digunakan pada mikrokontroler adalah bahasa C pada CodeVisionAVR. Software user interface pada PC menggunakan Delphi 7 Second Edition. Perancangan rangkaian keseluruhan meliputi: rangkaian minimum system, LCD, driver motor, dan komunikasi wireless. Demo menggunakan prototipe kapal dengan 2 motor dan 1 PC. Gerak yang dikendalikan adalah gerak maju serta manuver kanan dan kiri.

6 Metodologi Studi Pustaka dan Survey Data Perencanaan dan Pembuatan Hardware Perencanaan dan Pembuatan Software Uji Coba dan Analisa Survey lapangan mengenai sistem kendali kapal Informasi komponen dan elektrik kapal Minimum System Komunikasi wireless Driver motor Flow chart User interface Uji minimum system Uji wireless Uji rudder Survey tempat uji coba kapal Prototipe kapal Uji kecepatan Uji dengan rute Uji rute bebas

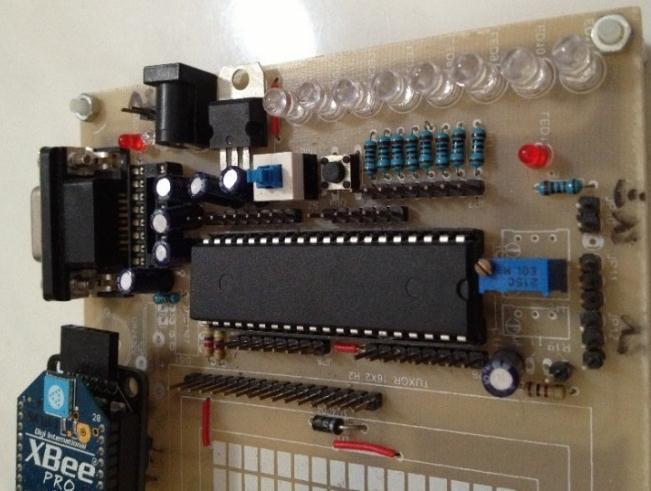
7 Xbee-Pro Transmitter Xbee-Pro Receiver Mikrokontroler LCD Motor Rudder PC Diagram Blok Fungsional Driver Motor Motor Propeler
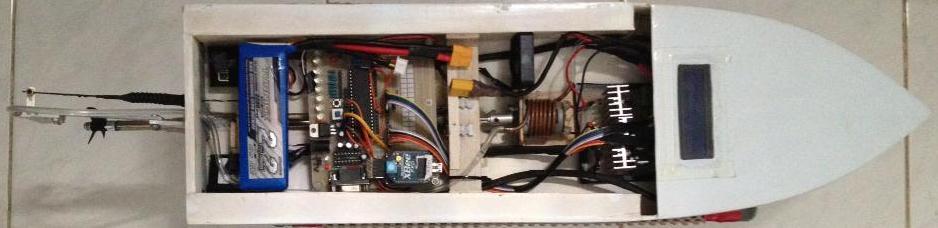
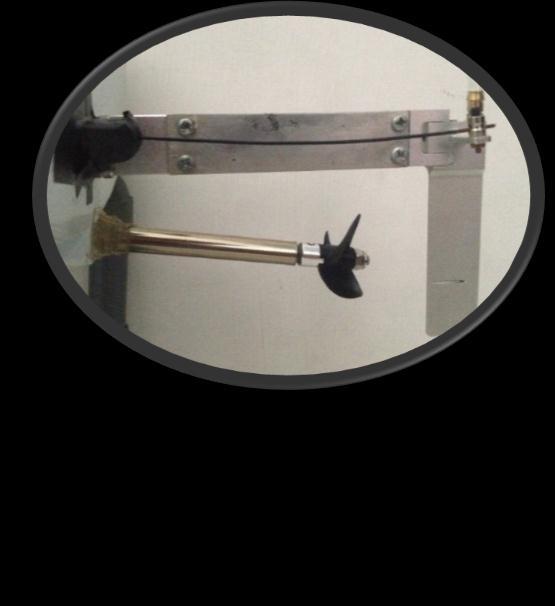




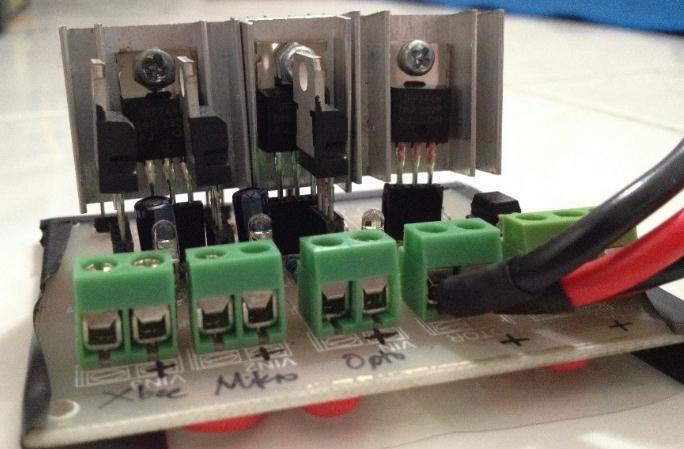

8 Perencanaan Elektrik dan Prototipe Kapal
9 Start A Inisialisasi ComPort Mikrokontroler membaca data yang masuk Pilih ComPort dan baud rate ya Connect tidak Data diproses Mikrokontroler Motor bergerak Flow Chart User Interface Masukkan input dari PC Data dikirim oleh transmitter Data diterima oleh receiver Mikrokontroler mengirim data feedback Data diterima PC Data ditampilkan pada user interface A End



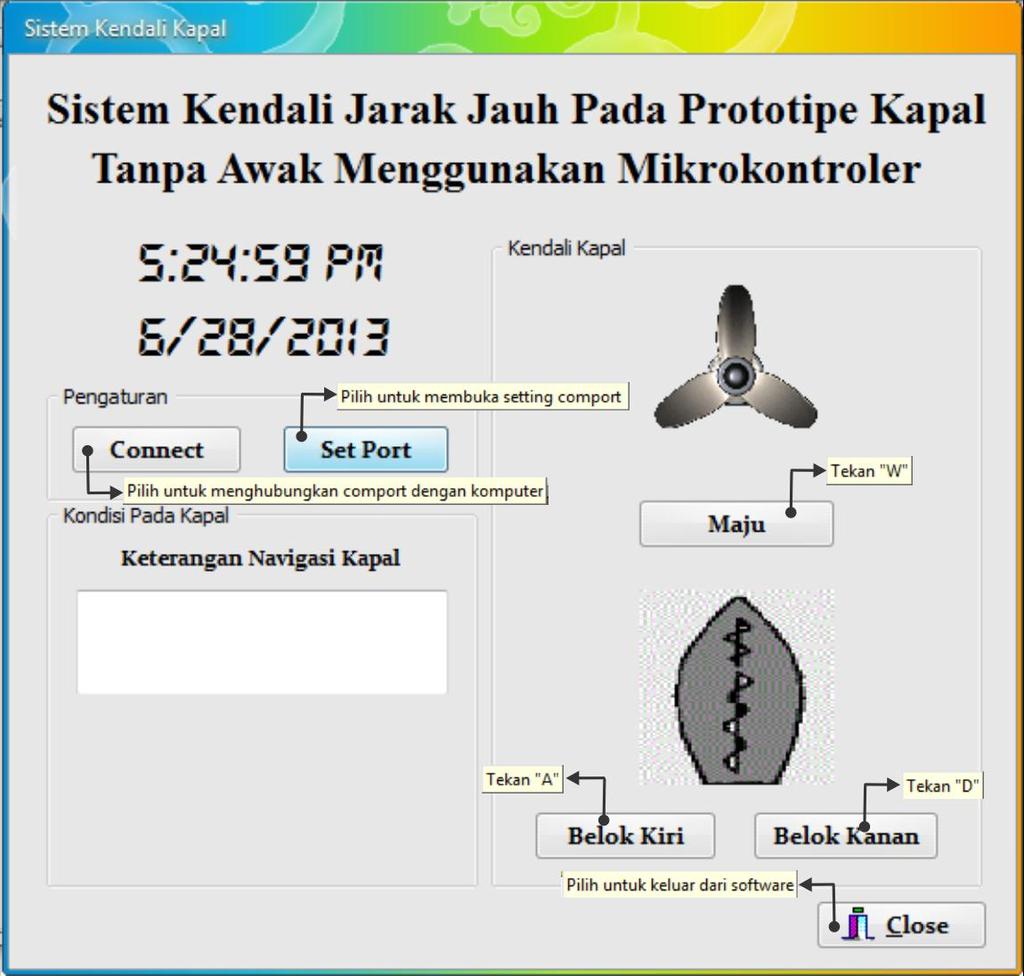
10 Perencanaan User Interface
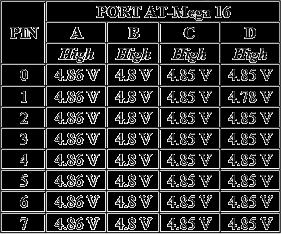
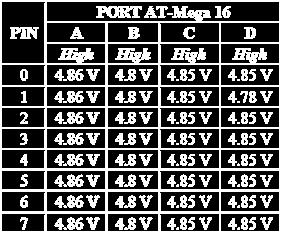


11 Uji Mikrokontroler + LCD Active High Active Low
 (bytes) (bytes)")


 Kesalahan 1 5")



12 Uji Komunikasi Wireless No Jarak Data Dikirim Data Diterima Data Lepas Persen (meter) (bytes) (bytes) (bytes) Kesalahan % % : : : : : : : : : : : : : : : : : : % % Rata-rata persen kesalahan 0,00 % hingga jarak 20 meter No Jarak Data Dikirim Data Diterima Data Lepas Persen (meter) (bytes) (bytes) (bytes) Kesalahan % % % : : : : : : : : : : : : : : : : : : % % % % % % Transmitter Data mulai lepas pada jarak 75 meter dan rata-rata persen kesalahan 2,10 % hingga jarak 100 meter Receiver

13 Uji User Interface Tombol W ditekan Tombol D ditekan Tombol A ditekan

14 Uji Rudder Sudut Duty Cycle Duty Cycle PWM Servo PWM Servo Persen Rudder Saat Awal Saat Pengujian Kesalahan -30 6,5 % 6,56 % 1.23% 0 7,5 % 8,48 % 13.17% +30 8,5 % 10,4 % 22.64% Sudut -30 Untuk belok kiri Sudut 0 Untuk lurus Sudut +30 Untuk belok kanan
 (meter per detik) 1 7.5 0.667 2 7.2 0.")


15 Uji Kecepatan Percobaan ke- Waktu Kecepatan (detik) (meter per detik) Duty cycle = 25,29 % Start Jarak = 5 Meter Kecepatan rata-rata = m/s 0,7 m/s Finish

16 Uji Manuver dan Turning dengan Rute 8

17 Uji Manuver dan Turning dengan Rute 0


18 Uji Manuver dan Turning Rute Bebas
19 Kesimpulan Untuk pengujian wireless dengan jarak indoor 1 sampai 20 Meter berhasil menerima data seluruhnya dengan baik. Untuk jarak oudoor 1 sampai 100 Meter masih terdapat rata-rata error sebesar 4,2% terhitung mulai dari jarak 75 Meter. Penggunaan duty cycle PWM pada propeler sebesar 25,29 % dengan tegangan sebesar 7,14 Volt. Pada jarak tempuh pengujian sejauh 5 Meter, kecepatan rata-rata prototipe kapal sebesar 0,7 m/s. Penggunaan rudder dengan duty cycle PWM 6,56 % untuk posisi -30, duty cycle 8,48 % untuk posisi 0, dan duty cycle 10,4 % untuk posisi +30. Sistem kendali dilakukan melalui keyboard dengan tombol W untuk manuver maju, tombol A untuk turning ke kiri dan tombol D untuk turning ke kanan. Prototipe kapal tanpa awak dapat menempuh rute yang berbentuk angka 8 dan rute yang berbentuk angka 0 dengan baik. Serta handal dalam pengendalian dengan rute bebas.
20 Saran Penggunaan antena eksternal sebaiknya ditambahkan untuk memperbaiki komunikasi wireless menggunakan XBee-Pro. Pemodelan dan pemahaman tentang software Delphi akan membantu perancangan sistem kendali jarak jauh yang lebih baik dan interface yang user friendly. Untuk pengembangan alat ini, dapat digunakan perangkat tambahan berupa kompas dan GPS sebagai monitoring system prototipe kapal tanpa awak.
21 Terima Kasih
SISTEM KENDALI JARAK JAUH MINIATUR TANK TANPA AWAK
 SISTEM KENDALI JARAK JAUH MINIATUR TANK TANPA AWAK OLEH : Eko Efendi (2211030009) Dio Adya Pratama (2211030036) Dosen Pembimbing : Suwito ST.,MT NIP. 19810105 200501 1004 Latar Belakang Meminimalisir prajurit
SISTEM KENDALI JARAK JAUH MINIATUR TANK TANPA AWAK OLEH : Eko Efendi (2211030009) Dio Adya Pratama (2211030036) Dosen Pembimbing : Suwito ST.,MT NIP. 19810105 200501 1004 Latar Belakang Meminimalisir prajurit
Rancang Bangun Counter Product Logger Menggunakan Sensor Infrared Berbasis Internet
 Rancang Bangun Counter Product Logger Menggunakan Sensor Infrared Berbasis Internet Oleh: Syarif Hidayatullah 2205 100 158 Pembimbing: Ir. Harris Pirngadji, MT.ID. BIDANG STUDI ELEKTRONIKA Jurusan Teknik
Rancang Bangun Counter Product Logger Menggunakan Sensor Infrared Berbasis Internet Oleh: Syarif Hidayatullah 2205 100 158 Pembimbing: Ir. Harris Pirngadji, MT.ID. BIDANG STUDI ELEKTRONIKA Jurusan Teknik
TUGAS AKHIR TE
 TUGAS AKHIR TE 090362 KARTU TOL ELEKTRONIK MENGGUNAKAN RFID (RADIO FREQUENCY IDENTIFICATION) BERBASIS WEB DOSEN PEMBIMBING PUJIONO, S.T., M.T. PROGRAM STUDI D3 TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
TUGAS AKHIR TE 090362 KARTU TOL ELEKTRONIK MENGGUNAKAN RFID (RADIO FREQUENCY IDENTIFICATION) BERBASIS WEB DOSEN PEMBIMBING PUJIONO, S.T., M.T. PROGRAM STUDI D3 TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
Oleh : Pembimbing : Rachmad Setiawan, ST.,MT. NIP
 Oleh : Armaditya T. M. S. Syahdari Lutfi Akbar 2207030015 2207030057 Pembimbing : Rachmad Setiawan, ST.,MT. NIP. 19690529.199512.1.001 Bidang Studi Komputer Kontrol Program Studi D3 Teknik Elektro Fakultas
Oleh : Armaditya T. M. S. Syahdari Lutfi Akbar 2207030015 2207030057 Pembimbing : Rachmad Setiawan, ST.,MT. NIP. 19690529.199512.1.001 Bidang Studi Komputer Kontrol Program Studi D3 Teknik Elektro Fakultas
Sistem Keamanan Pintu Gerbang Berbasis AT89C51 Teroptimasi Basisdata Melalui Antarmuka Port Serial
 Rustam Asnawi, Octa Heriana, Sistem Keamanan Pintu Gerbang Berbasis AT89C51 Teroptimasi Sistem Keamanan Pintu Gerbang Berbasis AT89C51 Teroptimasi Basisdata Melalui Antarmuka Port Serial Rustam Asnawi
Rustam Asnawi, Octa Heriana, Sistem Keamanan Pintu Gerbang Berbasis AT89C51 Teroptimasi Sistem Keamanan Pintu Gerbang Berbasis AT89C51 Teroptimasi Basisdata Melalui Antarmuka Port Serial Rustam Asnawi
PENDAHULUAN BAB I PENDAHULUAN
 BAB I PENDAHULUAN 1.1. Latar Belakang Masalah Pesatnya perkembangan ilmu pengetahuan dan teknologi pada zaman sekarang, menuntut manusia untuk terus menciptakan inovasi baru di bidang teknologi. Hal ini
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah Pesatnya perkembangan ilmu pengetahuan dan teknologi pada zaman sekarang, menuntut manusia untuk terus menciptakan inovasi baru di bidang teknologi. Hal ini
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT 3.1. Identifikasi Kebutuhan Proses pembuatan alat penghitung benih ikan ini diperlukan identifikasi kebutuhan terhadap sistem yang akan dibuat, diantaranya: 1. Perlunya rangkaian
BAB III PERANCANGAN ALAT 3.1. Identifikasi Kebutuhan Proses pembuatan alat penghitung benih ikan ini diperlukan identifikasi kebutuhan terhadap sistem yang akan dibuat, diantaranya: 1. Perlunya rangkaian
MONITORING PH AIR DI INSTALASI PENGOLAHAN AIR MENGGUNAKAN MIKROKONTROLER BERBASIS RADIO
 MONITORING PH AIR DI INSTALASI PENGOLAHAN AIR MENGGUNAKAN MIKROKONTROLER BERBASIS RADIO Oleh : Tri Widayati ( 2210030018 ) Fandi Pramono ( 2210030026 ) Dosen Pembimbing : Slamet Budiprayitno, ST., MT NIP.
MONITORING PH AIR DI INSTALASI PENGOLAHAN AIR MENGGUNAKAN MIKROKONTROLER BERBASIS RADIO Oleh : Tri Widayati ( 2210030018 ) Fandi Pramono ( 2210030026 ) Dosen Pembimbing : Slamet Budiprayitno, ST., MT NIP.
SISTEM PENGENDALI DAN PENGAWAS PENGGUNAAN LISTRIK PADA GEDUNG BERTINGKAT BERBASIS WEB
 SISTEM PENGENDALI DAN PENGAWAS PENGGUNAAN LISTRIK PADA GEDUNG BERTINGKAT BERBASIS WEB Oleh : Eko Junaidi Salam 2208 030 006 Hari Purnawiyanto 2208 030 086 D3 Teknik Elektro Institut Teknologi Sepuluh Nopember
SISTEM PENGENDALI DAN PENGAWAS PENGGUNAAN LISTRIK PADA GEDUNG BERTINGKAT BERBASIS WEB Oleh : Eko Junaidi Salam 2208 030 006 Hari Purnawiyanto 2208 030 086 D3 Teknik Elektro Institut Teknologi Sepuluh Nopember
Rancang Bangun Alat Penggulung Dinamo Menggunakan Mikrokontroler
 TUGAS AKHIR Rancang Bangun Alat Penggulung Dinamo Menggunakan Mikrokontroler Oleh : Anita Suryaningsih 2211039002 Rachmad Baktiono 2211039050 Dosen Pembimbingan : Ir. Hanny Boedinugroho, MT. Eko Pujiyatno
TUGAS AKHIR Rancang Bangun Alat Penggulung Dinamo Menggunakan Mikrokontroler Oleh : Anita Suryaningsih 2211039002 Rachmad Baktiono 2211039050 Dosen Pembimbingan : Ir. Hanny Boedinugroho, MT. Eko Pujiyatno
Muhajir Ikhwani Marendra Kurniawan Suwito ST, MT
 TUGAS AKHIR ANGGOTA DOSEN PEMBIMBING KELOMPOK Muhajir Ikhwani 2209030056 Marendra Kurniawan 2209030062 Suwito ST, MT PERMASALAHAN Melihat latar belakang yang telah ada, maka dirumuskan permasalahan antara
TUGAS AKHIR ANGGOTA DOSEN PEMBIMBING KELOMPOK Muhajir Ikhwani 2209030056 Marendra Kurniawan 2209030062 Suwito ST, MT PERMASALAHAN Melihat latar belakang yang telah ada, maka dirumuskan permasalahan antara
Rancang Bangun Troller dengan Menggunakan Sistem Remote Kontrol RF YS-1020
 Rancang Bangun Troller dengan Menggunakan Sistem Remote Kontrol RF YS-1020 Abstrak 1,2 Randy Rahmat Saleh *), 1 Anwar Mujadin & 2 Viktor Vekky Ronald Repi 1 Jurusan Teknik Elektro, Universitas Al Azhar
Rancang Bangun Troller dengan Menggunakan Sistem Remote Kontrol RF YS-1020 Abstrak 1,2 Randy Rahmat Saleh *), 1 Anwar Mujadin & 2 Viktor Vekky Ronald Repi 1 Jurusan Teknik Elektro, Universitas Al Azhar
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1.Analisa Masalah Dalam perancangan dan implementasi robot keseimbangan dengan menggunakan metode PID, terdapat beberapa masalah yang harus dipecahkan. Permasalahan
BAB III ANALISA DAN PERANCANGAN III.1.Analisa Masalah Dalam perancangan dan implementasi robot keseimbangan dengan menggunakan metode PID, terdapat beberapa masalah yang harus dipecahkan. Permasalahan
PERANCANGAN SISTEM KOMUNIKASI PADA KAPAL (MCST-1 SHIP AUTOPILOT) DENGAN MEDIA KOMUNIKASI RF RADIO UNTUK MENDUKUNG SISTEM AUTOPILOT
 DENGAN MEDIA KOMUNIKASI RF RADIO UNTUK MENDUKUNG SISTEM AUTOPILOT") PERANCANGAN SISTEM KOMUNIKASI PADA KAPAL (MCST-1 SHIP AUTOPILOT) DENGAN MEDIA KOMUNIKASI RF RADIO UNTUK MENDUKUNG SISTEM AUTOPILOT Disusun Oleh : ARIF MUSA KUSUMA WARDHANA NRP. 2409 105 035 Dosen Pembimbing
PERANCANGAN SISTEM KOMUNIKASI PADA KAPAL (MCST-1 SHIP AUTOPILOT) DENGAN MEDIA KOMUNIKASI RF RADIO UNTUK MENDUKUNG SISTEM AUTOPILOT Disusun Oleh : ARIF MUSA KUSUMA WARDHANA NRP. 2409 105 035 Dosen Pembimbing
PERANCANGAN ALAT PENGATUR TEMPERATUR AIR PADA SHOWER MENGGUNAKAN KONTROL SUKSESSIVE BERBASIS MIKROKONTROLER
 PERANCANGAN ALAT PENGATUR TEMPERATUR AIR PADA SHOWER MENGGUNAKAN KONTROL SUKSESSIVE BERBASIS MIKROKONTROLER Bagus Idhar Junaidi 2209039004 Yasinta Fajar Saputri 2209039014 Dosen Pembimbing Ir. Rusdhianto
PERANCANGAN ALAT PENGATUR TEMPERATUR AIR PADA SHOWER MENGGUNAKAN KONTROL SUKSESSIVE BERBASIS MIKROKONTROLER Bagus Idhar Junaidi 2209039004 Yasinta Fajar Saputri 2209039014 Dosen Pembimbing Ir. Rusdhianto
BAB 3 PERANCANGAN SISTEM. pada sistem pengendali lampu telah dijelaskan pada bab 2. Pada bab ini akan dijelaskan
 BAB 3 PERANCANGAN SISTEM Konsep dasar mengendalikan lampu dan komponen komponen yang digunakan pada sistem pengendali lampu telah dijelaskan pada bab 2. Pada bab ini akan dijelaskan perancangan sistem
BAB 3 PERANCANGAN SISTEM Konsep dasar mengendalikan lampu dan komponen komponen yang digunakan pada sistem pengendali lampu telah dijelaskan pada bab 2. Pada bab ini akan dijelaskan perancangan sistem
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan Negara kepulauan dengan panjang pantai 81.000 Km dimana ± 2/3 wilayah kedaulatannya berupa perairan. Dengan memanfaatkan potensi wilayah ini banyak
BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan Negara kepulauan dengan panjang pantai 81.000 Km dimana ± 2/3 wilayah kedaulatannya berupa perairan. Dengan memanfaatkan potensi wilayah ini banyak
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas mengenai proses perancangan mekanik pembersih lantai otomatis serta penyusunan rangkaian untuk merealisasikan sistem alat. Dalam hal ini
BAB III PERANCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas mengenai proses perancangan mekanik pembersih lantai otomatis serta penyusunan rangkaian untuk merealisasikan sistem alat. Dalam hal ini
BAB III ANALISIS MASALAH DAN RANCANGAN ALAT
 BAB III ANALISIS MASALAH DAN RANCANGAN ALAT III.1. Analisa Permasalahan Masalah yang dihadapi adalah bagaimana untuk menetaskan telur ayam dalam jumlah banyak dan dalam waktu yang bersamaan. Karena kemampuan
BAB III ANALISIS MASALAH DAN RANCANGAN ALAT III.1. Analisa Permasalahan Masalah yang dihadapi adalah bagaimana untuk menetaskan telur ayam dalam jumlah banyak dan dalam waktu yang bersamaan. Karena kemampuan
ARIEF SARDJONO, ST, MT.
 KONTROL PENJEJAK PADA ROBOT PEMADAM API MENGGUNAKAN SISTEM PENGINDERA API DAN POSISI JARAK DENGAN METODE FUZZY LOGIC YOUR SUBTITLE GOES HERE OLEH PUNGKY EKA SASMITA 2209105037 Dr.TRI ARIEF SARDJONO, ST,
KONTROL PENJEJAK PADA ROBOT PEMADAM API MENGGUNAKAN SISTEM PENGINDERA API DAN POSISI JARAK DENGAN METODE FUZZY LOGIC YOUR SUBTITLE GOES HERE OLEH PUNGKY EKA SASMITA 2209105037 Dr.TRI ARIEF SARDJONO, ST,
BAB 3 PERANCANGAN SISTEM
 BAB 3 PERANCANGAN SISTEM Pada bab ini akan dijelaskan secara umum perancangan sistem pengingat pada kartu antrian dengan memanfaatkan gelombang radio, yang terdiri dari beberapa bagian yaitu blok diagram
BAB 3 PERANCANGAN SISTEM Pada bab ini akan dijelaskan secara umum perancangan sistem pengingat pada kartu antrian dengan memanfaatkan gelombang radio, yang terdiri dari beberapa bagian yaitu blok diagram
BAB III PEMBUATAN ALAT Tujuan Pembuatan Tujuan dari pembuatan alat ini yaitu untuk mewujudkan gagasan dan
 BAB III PEMBUATAN ALAT 3.. Pembuatan Dalam pembuatan suatu alat atau produk perlu adanya sebuah rancangan yang menjadi acuan dalam proses pembuatanya, sehingga kesalahan yang mungkin timbul dapat ditekan
BAB III PEMBUATAN ALAT 3.. Pembuatan Dalam pembuatan suatu alat atau produk perlu adanya sebuah rancangan yang menjadi acuan dalam proses pembuatanya, sehingga kesalahan yang mungkin timbul dapat ditekan
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan dan Implementasi Pemotong Rumput Lapangan Sepakbola Otomatis dengan Sensor Garis dan Dinding ini, terdapat beberapa masalah
BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan dan Implementasi Pemotong Rumput Lapangan Sepakbola Otomatis dengan Sensor Garis dan Dinding ini, terdapat beberapa masalah
BAB III PERANCANGAN. 3.1 Perancangan mekanik
 BAB III PERANCANGAN 3.1 Perancangan mekanik Dalam perancangan mekanik robot ini saya menggunakan software AutoCad 2009 untuk mendesign mekanik dan untuk bahan saya menggunakan Acrylic dengan ketebalan
BAB III PERANCANGAN 3.1 Perancangan mekanik Dalam perancangan mekanik robot ini saya menggunakan software AutoCad 2009 untuk mendesign mekanik dan untuk bahan saya menggunakan Acrylic dengan ketebalan
SIMULASI DATA ACQUISITION ALAT UJI FLIGHT CONTROL ACTUATOR PESAWAT MENGGUNAKAN SOFTWARE LABVIEW
 SIMULASI DATA ACQUISITION ALAT UJI FLIGHT CONTROL ACTUATOR PESAWAT DATA ACQUISITION SIMULATION OF TEST EQUIPMENT AIRCRAFT FLIGHT CONTROL ACTUATOR USING LABVIEW SOFTWARE Decy Nataliana 1, Usep Ali Albayumi
SIMULASI DATA ACQUISITION ALAT UJI FLIGHT CONTROL ACTUATOR PESAWAT DATA ACQUISITION SIMULATION OF TEST EQUIPMENT AIRCRAFT FLIGHT CONTROL ACTUATOR USING LABVIEW SOFTWARE Decy Nataliana 1, Usep Ali Albayumi
RANCANG BANGUN SISTEM AUTOTRACKING UNTUK ANTENA UNIDIRECTIONAL FREKUENSI 2.4GHZ DENGAN MENGGUNAKAN MIKROKONTOLER ARDUINO
 RANCANG BANGUN SISTEM AUTOTRACKING UNTUK ANTENA UNIDIRECTIONAL FREKUENSI 2.4GHZ DENGAN MENGGUNAKAN MIKROKONTOLER ARDUINO Ryandika Afdila (1), Arman Sani (2) Konsentrasi Teknik Telekomunikasi, Departemen
RANCANG BANGUN SISTEM AUTOTRACKING UNTUK ANTENA UNIDIRECTIONAL FREKUENSI 2.4GHZ DENGAN MENGGUNAKAN MIKROKONTOLER ARDUINO Ryandika Afdila (1), Arman Sani (2) Konsentrasi Teknik Telekomunikasi, Departemen
BAB III PERANCANGAN DAN PEMBUATAN APLIKASI
 BAB III PERANCANGAN DAN PEMBUATAN APLIKASI Dalam bab ini akan dibahas mengenai perancangan dan pembuatan aplikasi dengan menggunakan metodologi perancangan prototyping, prinsip kerja rangkaian berdasarkan
BAB III PERANCANGAN DAN PEMBUATAN APLIKASI Dalam bab ini akan dibahas mengenai perancangan dan pembuatan aplikasi dengan menggunakan metodologi perancangan prototyping, prinsip kerja rangkaian berdasarkan
BAB I PENDAHULUAN. dengan menambahkan PID (Proportional-Integral-Derivative) sebagai metode. kendali didalam base motor pada robot tersebut.
 sebagai metode. kendali didalam base motor pada robot tersebut.") BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Secara umum, permasalahan utama yang dihadapi dalam pengendalian robot adalah masalah gerakan robot yang masih kurang halus dalam pergerakannya berhubungan
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Secara umum, permasalahan utama yang dihadapi dalam pengendalian robot adalah masalah gerakan robot yang masih kurang halus dalam pergerakannya berhubungan
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisa Masalah Dalam Perancangan Robot Rubik s cube 3x3x3 Berbasis Mikrokontroler Menggunakan Metode Jessica Fridrich yang pembuatan nya terdapat beberapa masalah
BAB III ANALISIS DAN PERANCANGAN III.1. Analisa Masalah Dalam Perancangan Robot Rubik s cube 3x3x3 Berbasis Mikrokontroler Menggunakan Metode Jessica Fridrich yang pembuatan nya terdapat beberapa masalah
Perancangan Dan Pembuatan Robot Beroda Dan Berlengan Yang Dilengkapi Dengan Kamera Video Berbasis Mikrokotroler AT89S51
 Perancangan Dan Pembuatan Robot Beroda Dan Berlengan Yang Dilengkapi Dengan Kamera Video Berbasis Mikrokotroler AT89S51 Ary Herisaputra, F. Yudi Limpraptono, I Komang Somawirata Jurusan Teknik Elektro,
Perancangan Dan Pembuatan Robot Beroda Dan Berlengan Yang Dilengkapi Dengan Kamera Video Berbasis Mikrokotroler AT89S51 Ary Herisaputra, F. Yudi Limpraptono, I Komang Somawirata Jurusan Teknik Elektro,
PRESENTASI TUGAS AKHIR. Oleh : M. NUR SHOBAKH
 PRESENTASI TUGAS AKHIR PENGEMBANGAN ROBOT PENGIKUT GARIS BERBASIS MIKROKONTROLER SEBAGAI MEJA PENGANTAR MAKANAN OTOMATIS Oleh : M. NUR SHOBAKH 2108 030 061 DOSEN PEMBIMBING : Dr. Ir. Bambang Sampurno,
PRESENTASI TUGAS AKHIR PENGEMBANGAN ROBOT PENGIKUT GARIS BERBASIS MIKROKONTROLER SEBAGAI MEJA PENGANTAR MAKANAN OTOMATIS Oleh : M. NUR SHOBAKH 2108 030 061 DOSEN PEMBIMBING : Dr. Ir. Bambang Sampurno,
BAB III PERANCANGAN SISTEM
 31 BAB III PERANCANGAN SISTEM 3.1 Diagram Blok Air ditampung pada wadah yang nantinya akan dialirkan dengan menggunakan pompa. Pompa akan menglirkan air melalui saluran penghubung yang dibuat sedemikian
31 BAB III PERANCANGAN SISTEM 3.1 Diagram Blok Air ditampung pada wadah yang nantinya akan dialirkan dengan menggunakan pompa. Pompa akan menglirkan air melalui saluran penghubung yang dibuat sedemikian
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1. Analisa Permasalahan Sistem Transmisi Data Sensor Untuk Peringatan Dini Pada Kebakaran Hutan Dalam perancangan sistem transmisi data sensor untuk peringatan dini
BAB III ANALISA DAN PERANCANGAN III.1. Analisa Permasalahan Sistem Transmisi Data Sensor Untuk Peringatan Dini Pada Kebakaran Hutan Dalam perancangan sistem transmisi data sensor untuk peringatan dini
BAB III PERANCANGAN DAN PEMBUATAN. memungkinkan terjadinya kegagalan atau kurang memuaskan kerja alat yang telah dibuat.
 BAB III PERANCANGAN DAN PEMBUATAN 3.1 Perancangan Peranvangan merupakan suatu langkah kerja yang penting dalam penyusunan dan pembuatan alat dalam proyek akhir ini, sebab tanpa adanya perancangan yang
BAB III PERANCANGAN DAN PEMBUATAN 3.1 Perancangan Peranvangan merupakan suatu langkah kerja yang penting dalam penyusunan dan pembuatan alat dalam proyek akhir ini, sebab tanpa adanya perancangan yang
Oleh : LUQMAN ERWANSYAH MOH AGUS SYAHRI ROMADHON Dosen Pembimbing Rachmad Setiawan, ST, MT
 Oleh : LUQMAN ERWANSYAH 2207030028 MOH AGUS SYAHRI ROMADHON 2207030030 Dosen Pembimbing Rachmad Setiawan, ST, MT Program Studi D3 Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
Oleh : LUQMAN ERWANSYAH 2207030028 MOH AGUS SYAHRI ROMADHON 2207030030 Dosen Pembimbing Rachmad Setiawan, ST, MT Program Studi D3 Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
BAB IV PROTOTYPE ROBOT TANGGA BERODA. beroda yang dapat menaiki tangga dengan metode pengangkatan beban pada roda
 BAB IV PROTOTYPE ROBOT TANGGA BERODA 4.1 Desain Sistem Sistem yang dibangun pada tugas akhir ini bertujuan untuk membangun robot beroda yang dapat menaiki tangga dengan metode pengangkatan beban pada roda
BAB IV PROTOTYPE ROBOT TANGGA BERODA 4.1 Desain Sistem Sistem yang dibangun pada tugas akhir ini bertujuan untuk membangun robot beroda yang dapat menaiki tangga dengan metode pengangkatan beban pada roda
TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer
 TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer disusun oleh : MERIZKY ALFAN ADHI HIDAYAT AZZA LAZUARDI JA FAR JUNAIDI 31780 31924
TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer disusun oleh : MERIZKY ALFAN ADHI HIDAYAT AZZA LAZUARDI JA FAR JUNAIDI 31780 31924
SISTEM PENGATURAN STARTING DAN PENGEREMAN MOTOR UNTUK PINTU GESER OTOMATIS
 SISTEM PENGATURAN STARTING DAN PENGEREMAN MOTOR UNTUK PINTU GESER OTOMATIS Raditya Fahmi B. 2208 030 029 Disusun oleh : Aris Wijaya 2208 030 064 DOSEN PEMBIMBING Pujiono, ST., MT. NIP. 196802151994031022
SISTEM PENGATURAN STARTING DAN PENGEREMAN MOTOR UNTUK PINTU GESER OTOMATIS Raditya Fahmi B. 2208 030 029 Disusun oleh : Aris Wijaya 2208 030 064 DOSEN PEMBIMBING Pujiono, ST., MT. NIP. 196802151994031022
BAB V PENGUJIAN DAN ANALISIS. dapat berjalan sesuai perancangan pada bab sebelumnya, selanjutnya akan dilakukan
 BAB V PENGUJIAN DAN ANALISIS Pada bab ini akan diuraikan tentang proses pengujian sistem yang meliputi pengukuran terhadap parameter-parameter dari setiap komponen per blok maupun secara keseluruhan, dan
BAB V PENGUJIAN DAN ANALISIS Pada bab ini akan diuraikan tentang proses pengujian sistem yang meliputi pengukuran terhadap parameter-parameter dari setiap komponen per blok maupun secara keseluruhan, dan
BAB IV ANALISA DAN PENGUJIAN ALAT
 BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Umum Robot merupakan kesatuan kerja dari semua kerja perangkat penyusunnya. Perancangan robot dimulai dengan menggali informasi dari berbagai referensi, temukan ide,
BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Umum Robot merupakan kesatuan kerja dari semua kerja perangkat penyusunnya. Perancangan robot dimulai dengan menggali informasi dari berbagai referensi, temukan ide,
PENGENDALI LAMPU JARAK JAUH TANPA KABEL BERBASIS PC
 BAB I PENDAHULUAN Bab ini menguraikan tentang latar belakang topik Tugas Akhir, tujuan Tugas Akhir, permasalahan dan rumusan masalah, ruang lingkup dan batasan masalah, serta metodologi dan sistematika
BAB I PENDAHULUAN Bab ini menguraikan tentang latar belakang topik Tugas Akhir, tujuan Tugas Akhir, permasalahan dan rumusan masalah, ruang lingkup dan batasan masalah, serta metodologi dan sistematika
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1. Analisa Permasalahan Pada saat kita mencuci pakaian baik secara manual maupun menggunakan alat bantu yaitu mesin cuci, dalam proses pengeringan pakaian tersebut belum
BAB III ANALISA DAN PERANCANGAN III.1. Analisa Permasalahan Pada saat kita mencuci pakaian baik secara manual maupun menggunakan alat bantu yaitu mesin cuci, dalam proses pengeringan pakaian tersebut belum
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan tentang perancangan dari perangkat keras dan perangkat lunak pada alat ini. Dimulai dengan uraian tentang perangkat keras dilanjutkan dengan uraian
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan tentang perancangan dari perangkat keras dan perangkat lunak pada alat ini. Dimulai dengan uraian tentang perangkat keras dilanjutkan dengan uraian
OTOMASI ALAT PEMBUAT BRIKET ARANG MENGGUNAKAN PLC
 OTOMASI ALAT PEMBUAT BRIKET ARANG MENGGUNAKAN PLC Nama Mahasiswa : Alifa Rachma Husaeni 2208 039 006 Alvian 220803033 Nama Pembimbing : Suwito, ST, MT. Program Studi D3 Teknik Elektro Jurusan Teknik Elektro
OTOMASI ALAT PEMBUAT BRIKET ARANG MENGGUNAKAN PLC Nama Mahasiswa : Alifa Rachma Husaeni 2208 039 006 Alvian 220803033 Nama Pembimbing : Suwito, ST, MT. Program Studi D3 Teknik Elektro Jurusan Teknik Elektro
PERANCANGAN ROBOT OKTAPOD DENGAN DUA DERAJAT KEBEBASAN ASIMETRI
 Asrul Rizal Ahmad Padilah 1, Taufiq Nuzwir Nizar 2 1,2 Jurusan Teknik Komputer Unikom, Bandung 1 asrul1423@gmail.com, 2 taufiq.nizar@gmail.com ABSTRAK Salah satu kelemahan robot dengan roda sebagai alat
Asrul Rizal Ahmad Padilah 1, Taufiq Nuzwir Nizar 2 1,2 Jurusan Teknik Komputer Unikom, Bandung 1 asrul1423@gmail.com, 2 taufiq.nizar@gmail.com ABSTRAK Salah satu kelemahan robot dengan roda sebagai alat
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT Pada bab ini akan membahas proses yang akan dilakukan terhadap alat yang akan dibuat, mulai dari perancangan pada rangkaian hingga hasil jadi yang akan difungsikan.
BAB III PERANCANGAN DAN PEMBUATAN ALAT Pada bab ini akan membahas proses yang akan dilakukan terhadap alat yang akan dibuat, mulai dari perancangan pada rangkaian hingga hasil jadi yang akan difungsikan.
PERANCANGAN PENGONTROL ROBOT BERKAMERA VIA JARINGAN INTERNET (TCP/IP)
") PERANCANGAN PENGONTROL ROBOT BERKAMERA VIA JARINGAN INTERNET (TCP/IP) Dosen Pembimbing: 1. Eko Setijadi, ST. MT. Ph.D. 2. Ir. Gatot Kusrahardjo, MT. Ardianto Puguh S P MAHASISWA JURUSAN TEKNIK ELEKTRO
PERANCANGAN PENGONTROL ROBOT BERKAMERA VIA JARINGAN INTERNET (TCP/IP) Dosen Pembimbing: 1. Eko Setijadi, ST. MT. Ph.D. 2. Ir. Gatot Kusrahardjo, MT. Ardianto Puguh S P MAHASISWA JURUSAN TEKNIK ELEKTRO
3 METODE PENELITIAN. Penelitian dilaksanakan pada bulan Januari 2015 hingga Juni 2015 di
 3 METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian dilaksanakan pada bulan Januari 2015 hingga Juni 2015 di Laboratorium Teknik Elektronika, Jurusan Teknik Elektro, Universitas Lampung. 3.2
3 METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian Penelitian dilaksanakan pada bulan Januari 2015 hingga Juni 2015 di Laboratorium Teknik Elektronika, Jurusan Teknik Elektro, Universitas Lampung. 3.2
BAB IV IMPLEMENTASI DAN EVALUASI
 BAB IV IMPLEMENTASI DAN EVALUASI Pada bab ini akan dijelaskan mengenai implementasi dan evaluasi pada saat melakukan perancangan Standalone AVR Programmer. Berikut ini adalah beberapa cara implementasi
BAB IV IMPLEMENTASI DAN EVALUASI Pada bab ini akan dijelaskan mengenai implementasi dan evaluasi pada saat melakukan perancangan Standalone AVR Programmer. Berikut ini adalah beberapa cara implementasi
BAB IV PERANCANGAN SISTEM
 BAB IV PERANCANGAN SISTEM 4.1 Gambaran Umum Sistem Perancangan kendali kelistrikan rumah menggunakan web dimulai dari perancangan hardware yaitu rangkaian pengendali dan rangkaian pemantau seperti rangkaian
BAB IV PERANCANGAN SISTEM 4.1 Gambaran Umum Sistem Perancangan kendali kelistrikan rumah menggunakan web dimulai dari perancangan hardware yaitu rangkaian pengendali dan rangkaian pemantau seperti rangkaian
Rancang Bangun Robot Pemantau Wireless Berbasis Mikrokontroler ATMega8535 Menggunakan Bahasa Basic
 Jurnal Penelitian Sains Volume 14 Nomer 4(B) 14404 Rancang Bangun Robot Pemantau Wireless Berbasis Mikrokontroler ATMega8535 Menggunakan Bahasa Basic Khairul Saleh Jurusan Fisika, Universitas Sriwijaya,
Jurnal Penelitian Sains Volume 14 Nomer 4(B) 14404 Rancang Bangun Robot Pemantau Wireless Berbasis Mikrokontroler ATMega8535 Menggunakan Bahasa Basic Khairul Saleh Jurusan Fisika, Universitas Sriwijaya,
BAB IV PENGUJIAN DAN ANALISA
 BAB IV PENGUJIAN DAN ANALISA 4.1 Umum Perancangan robot merupakan aplikasi dari ilmu tentang robotika yang diketahui. Kinerja alat tersebut dapat berjalan sesuai keinginan kita dengan apa yang kita rancang.
BAB IV PENGUJIAN DAN ANALISA 4.1 Umum Perancangan robot merupakan aplikasi dari ilmu tentang robotika yang diketahui. Kinerja alat tersebut dapat berjalan sesuai keinginan kita dengan apa yang kita rancang.
PERANCANGAN DAN PEMBUATAN SISTEM MONITORING RUANGAN MENGGUNAKAN KAMERA MELALUI INTERNET
 PERANCANGAN DAN PEMBUATAN SISTEM MONITORING RUANGAN MENGGUNAKAN KAMERA MELALUI INTERNET Oleh: Irwan Adi Prayugo (6407030006) Moch. Wijayanto (6407030011) JURUSAN TEKNIK KELISTRIKAN KAPAL POLITEKNIK PERKAPALAN
PERANCANGAN DAN PEMBUATAN SISTEM MONITORING RUANGAN MENGGUNAKAN KAMERA MELALUI INTERNET Oleh: Irwan Adi Prayugo (6407030006) Moch. Wijayanto (6407030011) JURUSAN TEKNIK KELISTRIKAN KAPAL POLITEKNIK PERKAPALAN
Gambar 3.1 Diagram Blok Alat
 BAB III METODE PENELITIAN Penelitian ini menggunakan metode penelitian eksperimen (uji coba). Tujuan yang ingin dicapai dari penelitian ini adalah membuat suatu alat yang dapat menghitung biaya pemakaian
BAB III METODE PENELITIAN Penelitian ini menggunakan metode penelitian eksperimen (uji coba). Tujuan yang ingin dicapai dari penelitian ini adalah membuat suatu alat yang dapat menghitung biaya pemakaian
BAB III PERANCANGAN. Pada bab ini akan dibahas mengenai beberapa hal dasar tentang bagaimana. simulasi mobil automatis dirancang, diantaranya adalah :
 BAB III PERANCANGAN Pada bab ini akan dibahas mengenai beberapa hal dasar tentang bagaimana simulasi mobil automatis dirancang, diantaranya adalah : 1. Menentukan tujuan dan kondisi pembuatan simulasi
BAB III PERANCANGAN Pada bab ini akan dibahas mengenai beberapa hal dasar tentang bagaimana simulasi mobil automatis dirancang, diantaranya adalah : 1. Menentukan tujuan dan kondisi pembuatan simulasi
BAB III PERENCANAAN PERANGKAT KERAS DAN LUNAK
 21 BAB III PERENCANAAN PERANGKAT KERAS DAN LUNAK 3.1 Gambaran umum Perancangan sistem pada Odometer digital terbagi dua yaitu perancangan perangkat keras (hardware) dan perangkat lunak (software). Perancangan
21 BAB III PERENCANAAN PERANGKAT KERAS DAN LUNAK 3.1 Gambaran umum Perancangan sistem pada Odometer digital terbagi dua yaitu perancangan perangkat keras (hardware) dan perangkat lunak (software). Perancangan
BAB III PERANCANGAN SISTEM. untuk efisiensi energi listrik pada kehidupan sehari-hari. Perangkat input untuk
 BAB III PERANCANGAN SISTEM 3.1 Dasar Perancangan Sistem Perangkat keras yang akan dibangun adalah suatu aplikasi mikrokontroler untuk efisiensi energi listrik pada kehidupan sehari-hari. Perangkat input
BAB III PERANCANGAN SISTEM 3.1 Dasar Perancangan Sistem Perangkat keras yang akan dibangun adalah suatu aplikasi mikrokontroler untuk efisiensi energi listrik pada kehidupan sehari-hari. Perangkat input
III. METODE PENELITIAN. Perancangan sistem dilakukan dari bulan Maret sampai Juni 2014, bertempat di
 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Perancangan sistem dilakukan dari bulan Maret sampai Juni 2014, bertempat di Laboratorium Terpadu Teknik Elektro, Jurusan Teknik Elektro, Universitas
III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Perancangan sistem dilakukan dari bulan Maret sampai Juni 2014, bertempat di Laboratorium Terpadu Teknik Elektro, Jurusan Teknik Elektro, Universitas
PERANCANGAN SISTEM KENDALI GERAK PADA PLATFORM ROBOT PENGANGKUT
 PERANCANGAN SISTEM KENDALI GERAK PADA PLATFORM ROBOT PENGANGKUT Ripki Hamdi 1, Taufiq Nuzwir Nizar 2 1,2 Jurusan Teknik Komputer Unikom, Bandung 1 qie.hamdi@gmail.com, 2 taufiq.nizar@gmail.com ABSTRAK
PERANCANGAN SISTEM KENDALI GERAK PADA PLATFORM ROBOT PENGANGKUT Ripki Hamdi 1, Taufiq Nuzwir Nizar 2 1,2 Jurusan Teknik Komputer Unikom, Bandung 1 qie.hamdi@gmail.com, 2 taufiq.nizar@gmail.com ABSTRAK
PENENTUAN SUDUT LENGAN ROBOT HUMANOID BERDASARKAN KOORDINAT YANG DIKIRIM DARI PC MENGGUNAKAN USER INTERFACE YANG DIBUAT DARI Qt
 PENENTUAN SUDUT LENGAN ROBOT HUMANOID BERDASARKAN KOORDINAT YANG DIKIRIM DARI PC MENGGUNAKAN USER INTERFACE YANG DIBUAT DARI Qt Adiyatma Ghazian Pratama¹, Ir. Nurussa adah, MT. 2, Mochammad Rif an, ST.,
PENENTUAN SUDUT LENGAN ROBOT HUMANOID BERDASARKAN KOORDINAT YANG DIKIRIM DARI PC MENGGUNAKAN USER INTERFACE YANG DIBUAT DARI Qt Adiyatma Ghazian Pratama¹, Ir. Nurussa adah, MT. 2, Mochammad Rif an, ST.,
BAB III PERANCANGAN ALAT. menjadi acuan dalam proses pembuatannya, sehingga kesalahan yang mungkin
 BAB III PERANCANGAN ALAT 3.1 Perancangan Dalam pembuatan suatu alat diperlikan adanya sebuah rancangan yang menjadi acuan dalam proses pembuatannya, sehingga kesalahan yang mungkin timbul dapat ditekan
BAB III PERANCANGAN ALAT 3.1 Perancangan Dalam pembuatan suatu alat diperlikan adanya sebuah rancangan yang menjadi acuan dalam proses pembuatannya, sehingga kesalahan yang mungkin timbul dapat ditekan
ROBOT OMNI DIRECTIONAL STEERING BERBASIS MIKROKONTROLER. Muchamad Nur Hudi. Dyah Lestari
 Nur Hudi, Lestari; Robot Omni Directional Steering Berbasis Mikrokontroler ROBOT OMNI DIRECTIONAL STEERING BERBASIS MIKROKONTROLER Muchamad Nur Hudi. Dyah Lestari Abstrak: Robot Omni merupakan seperangkat
Nur Hudi, Lestari; Robot Omni Directional Steering Berbasis Mikrokontroler ROBOT OMNI DIRECTIONAL STEERING BERBASIS MIKROKONTROLER Muchamad Nur Hudi. Dyah Lestari Abstrak: Robot Omni merupakan seperangkat
Rancangan Dan Pembuatan Storage Logic Analyzer
 Rancangan Dan Pembuatan Storage Logic Analyzer M. Ulinuha Puja D. S.,Pembimbing 1:Waru Djuriatno, Pembimbing 2:Moch. Rif an Abstrak Teknologi yang berkembang pesat saat ini telah mendorong percepatan di
Rancangan Dan Pembuatan Storage Logic Analyzer M. Ulinuha Puja D. S.,Pembimbing 1:Waru Djuriatno, Pembimbing 2:Moch. Rif an Abstrak Teknologi yang berkembang pesat saat ini telah mendorong percepatan di
BAB IV PENGUJIAN ALAT DAN ANALISA
 BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
BAB III ANALISIS DAN PERANCANGAN SISTEM. besar berupa gambar dengan tujuan agar sebuah sistem dapat lebih mudah
 BAB III ANALISIS DAN PERANCANGAN SISTEM 3.1 Blok Diagram Interface Blok Diagram Interface adalah bagian-bagian dan alur kerja sistem yang bertujuan untuk menerangkan cara kerja dan alur sistem tersebut
BAB III ANALISIS DAN PERANCANGAN SISTEM 3.1 Blok Diagram Interface Blok Diagram Interface adalah bagian-bagian dan alur kerja sistem yang bertujuan untuk menerangkan cara kerja dan alur sistem tersebut
BAB IV ANALISIS DATA HASIL PERCOBAAN
 BAB IV ANALISIS DATA HASIL PERCOBAAN Setelah dilakukan perancangan rangkaian kendali pada prototype mesin tetas yang baru maka dilakukan pengetesan terhadap sistem per blok hingga secara keseluruhan. 4.1
BAB IV ANALISIS DATA HASIL PERCOBAAN Setelah dilakukan perancangan rangkaian kendali pada prototype mesin tetas yang baru maka dilakukan pengetesan terhadap sistem per blok hingga secara keseluruhan. 4.1
PEMBUATAN PERANGKAT APLIKASI PEMANFAATAN WIRELESS SEBAGAI MEDIA UNTUK PENGIRIMAN DATA SERIAL
 PEMBUATAN PERANGKAT APLIKASI PEMANFAATAN WIRELESS SEBAGAI MEDIA UNTUK PENGIRIMAN DATA SERIAL Oleh : Zurnawita Dikky Chandra Staf Pengajar Teknik Elektro Politeknik Negeri Padang ABSTRACT Serial data transmission
PEMBUATAN PERANGKAT APLIKASI PEMANFAATAN WIRELESS SEBAGAI MEDIA UNTUK PENGIRIMAN DATA SERIAL Oleh : Zurnawita Dikky Chandra Staf Pengajar Teknik Elektro Politeknik Negeri Padang ABSTRACT Serial data transmission
BAB 3 PERANCANGAN DAN PEMBUATAN SISTEM
 BAB 3 PERANCANGAN DAN PEMBUATAN SISTEM 3.1. Spesifikasi Sistem Sebelum merancang blok diagram dan rangkaian terlebih dahulu membuat spesifikasi awal rangkaian untuk mempermudah proses pembacaan, spesifikasi
BAB 3 PERANCANGAN DAN PEMBUATAN SISTEM 3.1. Spesifikasi Sistem Sebelum merancang blok diagram dan rangkaian terlebih dahulu membuat spesifikasi awal rangkaian untuk mempermudah proses pembacaan, spesifikasi
Pengembangan OSD (On Screen Display) dengan Penambahan Menu untuk Aplikasi pada Semi Autonomous Mobile Robot dengan Lengan untuk Mengambil Objek
 dengan Penambahan Menu untuk Aplikasi pada Semi Autonomous Mobile Robot dengan Lengan untuk Mengambil Objek") JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: 2337-3539 (2301-9271 Print) A-929 Pengembangan OSD (On Screen Display) dengan Penambahan Menu untuk Aplikasi pada Semi Autonomous Mobile Robot dengan Lengan
JURNAL TEKNIK ITS Vol. 5, No. 2, (2016) ISSN: 2337-3539 (2301-9271 Print) A-929 Pengembangan OSD (On Screen Display) dengan Penambahan Menu untuk Aplikasi pada Semi Autonomous Mobile Robot dengan Lengan
Rancang Bangun Prototipe Sistem Kontrol Penjejak Lintasan Pada Kapal Tanpa Awak Menggunakan Fuzzy Logic
 1 Rancang Bangun Prototipe Sistem Kontrol Penjejak Lintasan Pada Kapal Tanpa Awak Menggunakan Fuzzy Logic Mohamad Ridwan, Suwito (1), Tasripan (2), Aulia Siti Aisjah (3) Jurusan Teknik Elektro, Fakultas
1 Rancang Bangun Prototipe Sistem Kontrol Penjejak Lintasan Pada Kapal Tanpa Awak Menggunakan Fuzzy Logic Mohamad Ridwan, Suwito (1), Tasripan (2), Aulia Siti Aisjah (3) Jurusan Teknik Elektro, Fakultas
BAB 4 IMPLEMENTASI DAN EVALUASI. Atmel (www.atmel.com).
.") BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Spesifikasi Sistem 4.1.1 Spesifikasi Perangkat Keras Proses pengendalian mobile robot dan pengenalan image dilakukan oleh microcontroller keluarga AVR, yakni ATMEGA128
BAB 4 IMPLEMENTASI DAN EVALUASI 4.1 Spesifikasi Sistem 4.1.1 Spesifikasi Perangkat Keras Proses pengendalian mobile robot dan pengenalan image dilakukan oleh microcontroller keluarga AVR, yakni ATMEGA128
BAB II KONSEP DASAR PERANCANGAN
 BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
BAB II KONSEP DASAR PERANCANGAN Pada bab ini akan dijelaskan konsep dasar sistem keamanan rumah nirkabel berbasis mikrokontroler menggunakan modul Xbee Pro. Konsep dasar sistem ini terdiri dari gambaran
PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM
 PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM Fandy Hartono 1 2203 100 067 Dr. Tri Arief Sardjono, ST. MT. 2-1970 02 12 1995 12 1001 1 Penulis, Mahasiswa S-1
PENGATURAN KECEPATAN DAN POSISI MOTOR AC 3 PHASA MENGGUNAKAN DT AVR LOW COST MICRO SYSTEM Fandy Hartono 1 2203 100 067 Dr. Tri Arief Sardjono, ST. MT. 2-1970 02 12 1995 12 1001 1 Penulis, Mahasiswa S-1
BAB IV PENGUJIAN ALAT DAN ANALISA
 BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Setelah tahap perancangan hingga terciptanya sebuah alat maka tahap selanjutnya adalah pengukuran dan pengujian. Langkah ini ditempuh agar dapat diketahui karakteristik
BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Setelah tahap perancangan hingga terciptanya sebuah alat maka tahap selanjutnya adalah pengukuran dan pengujian. Langkah ini ditempuh agar dapat diketahui karakteristik
Prodi S1 Teknik Informatika, Fakultas Teknik, Universitas Telkom 1 2
 PERANCANGAN PERANGKAT LUNAK SEBAGAI MEDIA KOMUNIKASI WIRELESS PADA PROTOTIPE ROBOT PELAYAN BERBASIS MIRKOKONTROLER Pandu Widiantoro 1, Novian Anggis Suwastika 2 1,2 Prodi S1 Teknik Informatika, Fakultas
PERANCANGAN PERANGKAT LUNAK SEBAGAI MEDIA KOMUNIKASI WIRELESS PADA PROTOTIPE ROBOT PELAYAN BERBASIS MIRKOKONTROLER Pandu Widiantoro 1, Novian Anggis Suwastika 2 1,2 Prodi S1 Teknik Informatika, Fakultas
BAB III ANALISA DAN PERANCANGAN
 BAB III ANALISA DAN PERANCANGAN III.1. AnalisaMasalah Dalam perancangan robot penyeimbang menggunakan sensor jarakberbasis android, terdapatbeberapa masalah yang harus dipecahkan. Permasalahan tersebut
BAB III ANALISA DAN PERANCANGAN III.1. AnalisaMasalah Dalam perancangan robot penyeimbang menggunakan sensor jarakberbasis android, terdapatbeberapa masalah yang harus dipecahkan. Permasalahan tersebut
PERANCANGAN DAN IMPLEMENTASI TELMETRI SUHU BERBASIS ARDUINO UNO
 PERANCANGAN DAN IMPLEMENTASI TELMETRI SUHU BERBASIS ARDUINO UNO Emil Salim (1), Kasmir Tanjung (2) Konsentrasi Teknik Komputer, Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara (USU)
PERANCANGAN DAN IMPLEMENTASI TELMETRI SUHU BERBASIS ARDUINO UNO Emil Salim (1), Kasmir Tanjung (2) Konsentrasi Teknik Komputer, Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara (USU)
Sistem monitoring ph dan suhu air dengan transmisi data. Adi Tomi TE Tugas Akhir Program Studi Elektronika Elektro - ITS
 Sistem monitoring ph dan suhu air dengan transmisi data nirkabel Adi Tomi 2206100721 TE 091399 Tugas Akhir Program Studi Elektronika Elektro - ITS LATAR BELAKANG Pengukuran kadar keasaman (ph) dan suhu
Sistem monitoring ph dan suhu air dengan transmisi data nirkabel Adi Tomi 2206100721 TE 091399 Tugas Akhir Program Studi Elektronika Elektro - ITS LATAR BELAKANG Pengukuran kadar keasaman (ph) dan suhu
BAB IV PENGUJIAN RPBOT PENGHISAP DEBU
 BAB IV PENGUJIAN RPBOT PENGHISAP DEBU 4.1 Umum Setiap perancangan perangkat elektronika baik otomotis maupun manual dibutuhkan tahap-tahap khusus guna untuk menghasilkan perangkat yang baik dan sesuai
BAB IV PENGUJIAN RPBOT PENGHISAP DEBU 4.1 Umum Setiap perancangan perangkat elektronika baik otomotis maupun manual dibutuhkan tahap-tahap khusus guna untuk menghasilkan perangkat yang baik dan sesuai
PENGESAHAN PUBLIKASI HASIL PENELITIAN SKRIPSI JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS BRAWIJAYA
 KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO Jalan MT Haryono 67 Telp & Fax. 5566 Malang 655 KODE PJ- PENGESAHAN PUBLIKASI HASIL PENELITIAN SKRIPSI
KEMENTRIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO Jalan MT Haryono 67 Telp & Fax. 5566 Malang 655 KODE PJ- PENGESAHAN PUBLIKASI HASIL PENELITIAN SKRIPSI
BAB III ANALISIS DAN DESAIN SISTEM
 BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan dan implementasi jari animatronik berbasis mikrokontroler ini menggunakan beberapa metode rancang bangun yang pembuatannya terdapat
BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan dan implementasi jari animatronik berbasis mikrokontroler ini menggunakan beberapa metode rancang bangun yang pembuatannya terdapat
BAB III PERANCANGAN. Sistem management ruang rapat yang sedang berjalan saat ini masih
 BAB III PERANCANGAN 3.1 Perancangan Sistem Sistem management ruang rapat yang sedang berjalan saat ini masih bersifat manual, yaitu dengan melihat jadwal ruangan yang kosong kemudian user memilih jadwal
BAB III PERANCANGAN 3.1 Perancangan Sistem Sistem management ruang rapat yang sedang berjalan saat ini masih bersifat manual, yaitu dengan melihat jadwal ruangan yang kosong kemudian user memilih jadwal
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM 3.1. Rancangan Sistem Secara Keseluruhan Pada dasarnya Pengebor PCB Otomatis ini dapat difungsikan sebagai sebuah mesin pengebor PCB otomatis dengan didasarkan dari koordinat
BAB III PERANCANGAN SISTEM 3.1. Rancangan Sistem Secara Keseluruhan Pada dasarnya Pengebor PCB Otomatis ini dapat difungsikan sebagai sebuah mesin pengebor PCB otomatis dengan didasarkan dari koordinat
BAB III PERANCANGAN DAN PEMBUATAN ALAT. 3.1 Blok ahap ini akan diketahuin alurdiagram Rangkaian
 BAB III PERANCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas mengenai proses perancangan mekanik dan penyusunan rangkaian untuk merealisasikan sistem alat. Adapun sistem alat yang dibuat dan dirancang
BAB III PERANCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas mengenai proses perancangan mekanik dan penyusunan rangkaian untuk merealisasikan sistem alat. Adapun sistem alat yang dibuat dan dirancang
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT 3.1. Alat dan Bahan Alat dan bahan yang digunakan pada tugas akhir ini yaitu berupa hardware dan software. Table 3.1. merupakan alat dan bahan yang digunakan. Tabel 3.1. Alat dan
BAB III PERANCANGAN ALAT 3.1. Alat dan Bahan Alat dan bahan yang digunakan pada tugas akhir ini yaitu berupa hardware dan software. Table 3.1. merupakan alat dan bahan yang digunakan. Tabel 3.1. Alat dan
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Dalam bidang teknologi, orientasi produk teknologi yang dapat dimanfaatkan untuk kehidupan manusia adalah produk yang berkualitas, hemat energi, menarik, harga murah, bobot ringan,
BAB III PERANCANGAN ALAT Dalam bidang teknologi, orientasi produk teknologi yang dapat dimanfaatkan untuk kehidupan manusia adalah produk yang berkualitas, hemat energi, menarik, harga murah, bobot ringan,
BAB III METODELOGI PENELITIAN
 BAB III METODELOGI PENELITIAN Penelitian ini menggunakan metode penelitian eksperimen (uji coba). Tujuan dari penelitian ini adalah untuk mendapatkan hasil rancangan dari simulator yang dapat mendeteksi
BAB III METODELOGI PENELITIAN Penelitian ini menggunakan metode penelitian eksperimen (uji coba). Tujuan dari penelitian ini adalah untuk mendapatkan hasil rancangan dari simulator yang dapat mendeteksi
Perancangan Sistem Kendali Jarak Jauh Lego Nxt Robo Laptop Via Bluetooth
 Konferensi Nasional Sistem & Informatika 2015 STMIK STIKOM Bali, 9 10 Oktober 2015 Perancangan Sistem Kendali Jarak Jauh Lego Nxt Robo Laptop Via Bluetooth Padma Nyoman Crisnapati 1) STMIK STIKOM Bali
Konferensi Nasional Sistem & Informatika 2015 STMIK STIKOM Bali, 9 10 Oktober 2015 Perancangan Sistem Kendali Jarak Jauh Lego Nxt Robo Laptop Via Bluetooth Padma Nyoman Crisnapati 1) STMIK STIKOM Bali
BAB 1 PENDAHULUAN 1.1. Latar Belakang
 BAB 1 PENDAHULUAN 1.1. Latar Belakang Motor DC merupakan salah satu jenis aktuator yang cukup banyak digunakan dalam bidang industri. Seiring dengan kemajuan teknologi, permasalahan pada dunia industri
BAB 1 PENDAHULUAN 1.1. Latar Belakang Motor DC merupakan salah satu jenis aktuator yang cukup banyak digunakan dalam bidang industri. Seiring dengan kemajuan teknologi, permasalahan pada dunia industri
Bidang Information Technology and Communication 336 PERANCANGAN DAN REALISASI AUTOMATIC TIME SWITCH BERBASIS REAL TIME CLOCK DS1307 UNTUK SAKLAR LAMPU
 Bidang Information Technology and Communication 336 PERANCANGAN DAN REALISASI AUTOMATIC TIME SWITCH BERBASIS REAL TIME CLOCK DS1307 UNTUK SAKLAR LAMPU Adhe Ninu Indriawan, Hendi Handian Rachmat Subjurusan
Bidang Information Technology and Communication 336 PERANCANGAN DAN REALISASI AUTOMATIC TIME SWITCH BERBASIS REAL TIME CLOCK DS1307 UNTUK SAKLAR LAMPU Adhe Ninu Indriawan, Hendi Handian Rachmat Subjurusan
BAB IV PENGUJIAN ALAT DAN ANALISA
 BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
BAB III PERANCANGAN DAN PEMBUATAN
 BAB III PERANCANGAN DAN PEMBUATAN 3.1 Deskripsi dan Spesifikasi Alat 3.1.1 Deskripsi Bab III ini akan dibahas tentang perencanaan sistem alat ukur arus. Alat ukur arus ini menggunakan mikrokontroler arduino
BAB III PERANCANGAN DAN PEMBUATAN 3.1 Deskripsi dan Spesifikasi Alat 3.1.1 Deskripsi Bab III ini akan dibahas tentang perencanaan sistem alat ukur arus. Alat ukur arus ini menggunakan mikrokontroler arduino
DAFTAR ISI KATA PENGANTAR... DAFTAR ISI... DAFTAR TABEL... xiv. DAFTAR GAMBAR... xvi BAB I PENDAHULUAN Kontribusi... 3
 DAFTAR ISI ABSTRAKSI... vii KATA PENGANTAR... DAFTAR ISI... DAFTAR TABEL... xiv DAFTAR GAMBAR... xvi BAB I PENDAHULUAN... 1 1.1. Latar Belakang Masalah... 1 1.2. Perumusan Masalah... 2 1.3. Pembatasan
DAFTAR ISI ABSTRAKSI... vii KATA PENGANTAR... DAFTAR ISI... DAFTAR TABEL... xiv DAFTAR GAMBAR... xvi BAB I PENDAHULUAN... 1 1.1. Latar Belakang Masalah... 1 1.2. Perumusan Masalah... 2 1.3. Pembatasan
BAB IV PENGUJIAN DAN ANALISA SISTEM
 BAB IV PENGUJIAN DAN ANALISA SISTEM 4.1 Data Percobaan Pengujian yaitu merupakan bagian yang harus dilakukan untuk dapat mengetahui apakah alat yang telah dirancang mampu berfungsi sesuai apa yang diharapkan.
BAB IV PENGUJIAN DAN ANALISA SISTEM 4.1 Data Percobaan Pengujian yaitu merupakan bagian yang harus dilakukan untuk dapat mengetahui apakah alat yang telah dirancang mampu berfungsi sesuai apa yang diharapkan.
Perancangan Model Alat Pemotong Rumput Otomatis Berbasis Mikrokontroler AT89C51
 21 Perancangan Model Alat Pemotong Rumput Otomatis Berbasis Mikrokontroler AT89C51 Ahmad Yusup, Muchlas Arkanuddin, Tole Sutikno Program Studi Teknik Elektro, Universitas Ahmad Dahlan Abstrak Penggunaan
21 Perancangan Model Alat Pemotong Rumput Otomatis Berbasis Mikrokontroler AT89C51 Ahmad Yusup, Muchlas Arkanuddin, Tole Sutikno Program Studi Teknik Elektro, Universitas Ahmad Dahlan Abstrak Penggunaan
IMPLEMENTASI BLUETOOTH HC-05 UNTUK MENGURANGI TINGKAT KECELAKAAN PADA PENGENDARA SEPEDA MOTOR
 1 IMPLEMENTASI BLUETOOTH HC-05 UNTUK MENGURANGI TINGKAT KECELAKAAN PADA PENGENDARA SEPEDA MOTOR Fadila N. Eritha 1, Nurussa adah, Ir, MT 2 dan Akhmad Zainuri, ST, MT 3 1 ASASAAS Abstrak Banyaknya jumlah
1 IMPLEMENTASI BLUETOOTH HC-05 UNTUK MENGURANGI TINGKAT KECELAKAAN PADA PENGENDARA SEPEDA MOTOR Fadila N. Eritha 1, Nurussa adah, Ir, MT 2 dan Akhmad Zainuri, ST, MT 3 1 ASASAAS Abstrak Banyaknya jumlah
RANCANG BANGUN SISTEM KENDALI TAMAN MENGGUNAKAN MIKROKONTROLER ATMEGA 8
 TUGAS AKHIR RANCANG BANGUN SISTEM KENDALI TAMAN MENGGUNAKAN MIKROKONTROLER ATMEGA 8 Oleh : Muhamad Novrie Zainuddin 2208039030 Dosen Pembimbing : Suwito, ST. MT. Eko Pujiyatno Matni, S.Pd Program Studi
TUGAS AKHIR RANCANG BANGUN SISTEM KENDALI TAMAN MENGGUNAKAN MIKROKONTROLER ATMEGA 8 Oleh : Muhamad Novrie Zainuddin 2208039030 Dosen Pembimbing : Suwito, ST. MT. Eko Pujiyatno Matni, S.Pd Program Studi
BAB IV ANALISA DAN PEMBAHASAN. Pengujian sistem elektronik terdiri dari dua bagian yaitu: - Pengujian tegangan catu daya - Pengujian kartu AVR USB8535
 BAB IV ANALISA DAN PEMBAHASAN 4.1. Pengujian Alat Adapun urutan pengujian alat meliputi : - Pengujian sistem elektronik - Pengujian program dan mekanik 4.1.1 Pengujian Sistem Elektronik Pengujian sistem
BAB IV ANALISA DAN PEMBAHASAN 4.1. Pengujian Alat Adapun urutan pengujian alat meliputi : - Pengujian sistem elektronik - Pengujian program dan mekanik 4.1.1 Pengujian Sistem Elektronik Pengujian sistem
Kata Kunci : ROV (Remotely operated underwater vehicles), X-Bee, FSR-01
, X-Bee, FSR-01") REALISASI ROBOT DALAM AIR YANG DIKENDALIKAN OLEH REMOTE KONTROL Disusun Oleh: Nama : Asri Asmarariani Putri Nrp : 0622130 Jurusan Teknik Elektro, Fakultas Teknik,, Jl. Prof.Drg.Suria Sumantri, MPH no.65,
REALISASI ROBOT DALAM AIR YANG DIKENDALIKAN OLEH REMOTE KONTROL Disusun Oleh: Nama : Asri Asmarariani Putri Nrp : 0622130 Jurusan Teknik Elektro, Fakultas Teknik,, Jl. Prof.Drg.Suria Sumantri, MPH no.65,
BAB III DESKRIPSI DAN PERANCANGAN SISTEM
 BAB III DESKRIPSI DAN PERANCANGAN SISTEM 3.1. DESKRIPSI KERJA SISTEM Gambar 3.1. Blok diagram sistem Satelit-satelit GPS akan mengirimkan sinyal-sinyal secara kontinyu setiap detiknya. GPS receiver akan
BAB III DESKRIPSI DAN PERANCANGAN SISTEM 3.1. DESKRIPSI KERJA SISTEM Gambar 3.1. Blok diagram sistem Satelit-satelit GPS akan mengirimkan sinyal-sinyal secara kontinyu setiap detiknya. GPS receiver akan