ARIEF SARDJONO, ST, MT.
|
|
|
- Hamdani Susman
- 7 tahun lalu
- Tontonan:
Transkripsi


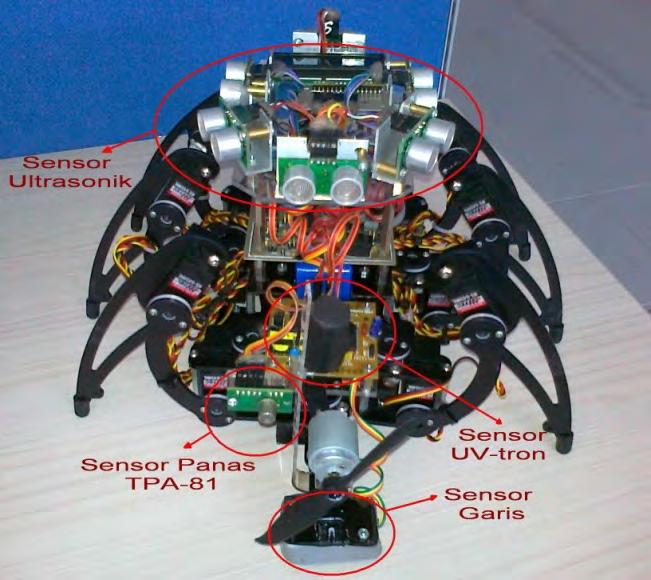
1 KONTROL PENJEJAK PADA ROBOT PEMADAM API MENGGUNAKAN SISTEM PENGINDERA API DAN POSISI JARAK DENGAN METODE FUZZY LOGIC YOUR SUBTITLE GOES HERE OLEH PUNGKY EKA SASMITA Dr.TRI ARIEF SARDJONO, ST, MT. Ir. HARRIS PIRNGADI, MT. 6 JULI 2011 RUANG B203 TEKNIK ELEKTRO ITS
2 LATAR BELAKANG TUJUAN GAMBARAN UMUM PERMASALAHAN METODOLOGI PENELITIAN KESIMPULAN & SARAN

3 LATAR BELAKANG Robot pemadam api menggunakan robot hexapod Dengan mengambil contoh kebakaran yang disimulasikan dalam lapangan Kontes Robot Cerdas Indonesia

4 LATAR BELAKANG Algoritma cerdas berguna untuk menambah intellegence dari sebuah robot Ketertarikan penulis dalam dunia robotika




5 SOLUSI DIPERLUKAN SISTEM NAVIGASI YANG HANDAL SEHINGGA DAPAT MENUNJANG KINERJA OPTIMUM ROBOT KONTROL PENJEJAK PADA ROBOT PEMADAM API MENGGUNAKAN SISTEM PENGINDERA API DAN POSISI JARAK DENGAN METODE FUZZY LOGIC


6 TUJUAN Untuk merancang platform dan pengembangan perangkat lunak robot hexapod yang memiliki kemampuan navigasi yang baik dalam melakukan misi pemadaman api dalam Kontes Robot Cerdas Indonesia 2
7 PERMASALAHAN Bagaimana membaca data sensor thermopile array 1 MASALAH 2 Bagaimana pengintegrasian sistem penempatan sensor dan modulmodul elektronik 3 Bagaimanakah menerapkan algoritma fuzzy pada robot otomatis sehingga dapat menghasilkan sistem navigasi yang baik





8 BATASAN MASALAH 1. Sebagai objek, api yang digunakan berasal dari nyala api lilin 2. Sensor jarak yang digunakan adalah sensor ultrasonik 3. Proses navigasi robot dilakukan oleh mikrokontroler 4. Algoritma yang digunakan untuk mengontrol robot otomatis adalah algoritma wall folowing yang dibuat menggunakan metode fuzzy logic 5. Bentuk lapangan pengujian sesuai dengan Kontes Robot Cerdas Indonesia dengan konfigurasi yang tetap.
9 METODOLOGI PENELITIAN MULAI STUDI LITERATUR PERANCANGAN SISTEM PENGUJIAN ALAT ANALISA DATA PENULISAN LAPORAN SELESAI
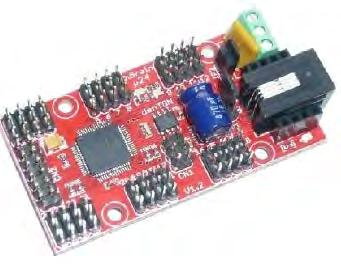
10 PERANCANGAN SISTEM Perancangan Sistem Perancangan Mekanik Robot Perancangan Elektrik Robot Perancangan Software Revisi per bagian sistem Pengujian per bagian sistem Integrasi Sistem Perancangan Algoritma Fuzzy Revisi Algoritma Pengujian Algoritma Pengujian Akhir

11 PERANCANGAN MEKANIK Mekanik Robot Hexapod

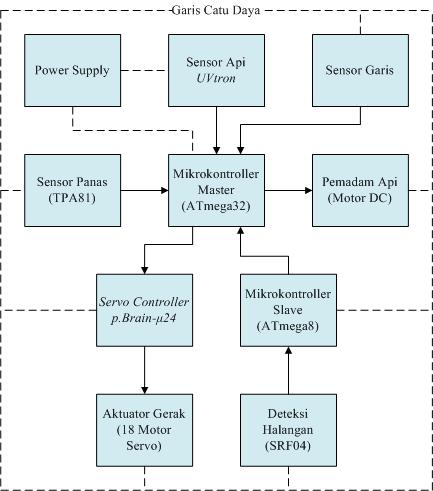


12 PERANCANGAN ELEKTRIK ROBOT Blok Diagram Elektrik Sistem

13 PERANCANGAN ELEKTRIK ROBOT 1. Perancangan Minimum Sistem
14 PERANCANGAN ELEKTRIK ROBOT 2. Perancangan Rangkaian Sensor Garis
15 PERANCANGAN ELEKTRIK ROBOT 3. Perancangan Rangkaian Konverter TTL ke RS232
16 PERANCANGAN ELEKTRIK ROBOT 4. Perancangan Driver Motor DC
17 PERANCANGAN SOFTWARE 1. Sistem Scanning sensor ultrasonik 2. Pembacaan data sensor TPA81 3. Komunikasi serial antar mikrokontroler 4. Algoritma robot secara keseluruhan
18 PERANCANGAN SOFTWARE 1. Sistem Scanning sensor ultrasonik Flowchart Pembacaan Jarak Start Inisialisasi Timer1 trigger=high delay 10 us Konfigurasi peletakan sensor ultrasonik trigger=low us2 echo=high N us1 us3 Y Start timer1 TCNT1++ echo=low us6 us4 N timer1 overflow us5 Y Stop timer TCNT1=36000 Y jarak= TCNT1/58 Stop
19 PERANCANGAN SOFTWARE 2. Pembacaan data sensor TPA81 unsigned char termal_read(unsigned char count) { unsigned char suhu; delay_ms(50); i2c_start(); i2c_write(0xd0); i2c_write(count); i2c_start(); i2c_write(0xd1); suhu=i2c_read(0); i2c_stop(); return suhu; }
20 PERANCANGAN SOFTWARE 3. Komunikasi serial antar mikrokontroler // USART initialization // Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On // USART Transmitter: On // USART Mode: Asynchronous // USART Baud Rate: UCSRA=0x00; UCSRB=0x98; UCSRC=0x86; UBRRH=0x00; UBRRL=0x0C;


21 PERANCANGAN SOFTWARE 4. Algoritma robot secara keseluruhan START tidak Wall following Masuk ruangan tidak ya Mendeteksi Api ya Scan api tidak Posisi api ya Padamkan api Kembali ke Home STOP
22 PERANCANGAN SOFTWARE 4. Algoritma robot secara keseluruhan Proses fuzzy robot Start 2 data us Fuzzyfikasi us Evaluasi rule us Defuzzyfika si us Nilai maju Nilai belok Stop
23 PERANCANGAN SOFTWARE 4. Algoritma robot secara keseluruhan Fuzzyfikasi error Derajat Keanggotaan Zero 1 (-) Besar (-) Kecil (+) Kecil (+) Besar Error = Ultrasonik1 - set_kiri
24 PERANCANGAN SOFTWARE 4. Algoritma robot secara keseluruhan Fuzzyfikasi haluan Haluan = Ultrasonik2 - set_depan
25 PERANCANGAN SOFTWARE 4. Algoritma robot secara keseluruhan Evaluasi Rule Rule kontrol maju Rule kontrol belok
26 PERANCANGAN SOFTWARE 4. Algoritma robot secara keseluruhan Defuzzyfikasi Metode yang digunakan dalam proses ini adalah COG (Center of Gravity)


27 PERANCANGAN SOFTWARE 4. Algoritma robot secara keseluruhan Flowchart Pendeteksi Api Start Pengecekan sumber api tidak Scanning posisi api Mendeteksi posisi api ya Belok kanan Lurus Belok kiri Padamkan api Stop
28 PENGUJIAN ALAT 1. Pengujian Sensor Garis Data Pengujian Rangkaian Sensor Garis Pengujian Jarak (cm) Indikator led pada saat di garis putih Indikator led pada saat tidak di garis Putih 1 1 Mati Hidup Mati Hidup 3 2 Mati Hidup Mati Hidup 5 3 Mati Hidup Mati Hidup 7 4 Mati Hidup
29 PENGUJIAN ALAT 2. Pengujian Sensor Ultrasonik SRF04 Data Pengujian Sensor Ultrasonik SRF04 Pengujian Jarak Benda Tampilan pada LCD 1 3 cm 3 cm 2 6 cm 6 cm 3 10 cm 10 cm 4 15 cm 15 cm 5 20 cm 20 cm 6 25 cm 25 cm 7 30 cm 30 cm 8 40 cm 40 cm 9 50 cm 49 cm cm 71 cm cm 98 cm cm 150 cm cm 199 cm cm 243 cm
30 PENGUJIAN ALAT 3. Pengujian Sensor Api Hamamatsu UV-tron Data Pengujian Sensor Api Hamamatsu UV-tron Jarak (cm) Tegangan (volt)
 Data Sensor per pixel (desimal) 1 2 3 4 5 6 7 8 2 114 167 168 164 161 158 166 169")
31 PENGUJIAN ALAT 4. Pengujian Sensor Panas TPA-81 Sudut Pandang Sensor TPA81 Data Pengujian Sensor TPA-81 Jarak lilin (cm) Data Sensor per pixel (desimal)




32 PENGUJIAN ALAT 4. Pengujian Berjalan Mengikuti Dinding Kanan dan Kiri Hasil Pengujian Lintasan wall following kiri Lintasan Lurus Belokan 90º Belokan 180º Percobaan Hasil Percobaan Hasil Percobaan Hasil Lintasan Lurus Belokan 90º Belokan 180º

33 PENGUJIAN ALAT 4. Pengujian Sistem Secara Keseluruhan Konfigurasi Lapangan Hasil Pengujian Konfigurasi Lapangan Percobaan Ruangan Posisi Start Ruangan Posisi Api Memadamkan api Kembali ke Home 1 Normal 1 Ya Ya 2 Normal 2 Tidak Tidak Ya Ya Ya Ya Ya Ya Ya Ya Tidak Tidak Ya Ya
34 KESIMPULAN Didapatkan tingkat keberhasilan robot dalam melakukan misi pemadaman api dan kembali ke home sebesar 75%. Robot akan menghasilkan pergerakan yang tidak akurat pada saat suplai tegangan pada motor servo bernilai 5 Volt. Penggunaan algoritma left wall following pada saat robot mencari api di arena KRCI menggunakan metode fuzzy logic berhasil membuat robot menemukan sumber api dan memadamkannya dengan prosentase keberhasilan 75%. Didapatkan hasil pengukuran suhu terhadap sumber api sebesar 169 o pada saat sensor berada 3 cm terhadap sumber api. Penggunaan algoritma left wall following pada saat robot berjalan pada lintasan lurus menghasilkan prosentase keberhasilan 100%. Metode navigasi wall following mempermudah pembuatan rule dari kontrol fuzzy, hal ini karena hanya ada 2 variabel input yaitu error dan haluan sehingga tidak perlu lagi memfuzzykan setiap input (6 input sensor ultrasonik) yang mengakibatkan banyaknya kombinasi dari rule yang ada.

35 SARAN Penggunaan waktu sampling yang lebih kecil untuk akuisisi data dari mikrokontroler slave menuju mikrokontroler master dapat meningkatkan performa respon gerak pada robot hexapod Dalam merancang perangkat lunak pada robot, alur tugas yang harus dikerjakan oleh mikrokontroler harus memiliki urutan pengerjaan dari prioritas yang tinggi ke prioritas yang rendah. Hal ini dilakukan agar mikrokontroler dapat memberikan respon yang tepat sesuai dengan kondisi yang terjadi pada saat itu.
36 TERIMA KASIH... PUNGKY EKA SASMITA
Kontrol Penjejak Pada Robot Pemadam Api Menggunakan Sistem Pengindera Api Dan Posisi Jarak Dengan Metode Fuzzy Logic
 Kontrol Penjejak Pada Robot Pemadam Api Menggunakan Sistem Pengindera Api Dan Posisi Jarak Dengan Metode Fuzzy Logic Pungky Eka Sasmita, Dr.Tri Arief Sardjono, ST. MT., Ir. Harris Pirngadi, MT. Jurusan
Kontrol Penjejak Pada Robot Pemadam Api Menggunakan Sistem Pengindera Api Dan Posisi Jarak Dengan Metode Fuzzy Logic Pungky Eka Sasmita, Dr.Tri Arief Sardjono, ST. MT., Ir. Harris Pirngadi, MT. Jurusan
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan mekanik robot, perangkat lunak dari algoritma robot, serta metode pengujian robot. 3.1. Perancangan Mekanik Robot Bagian ini
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan mekanik robot, perangkat lunak dari algoritma robot, serta metode pengujian robot. 3.1. Perancangan Mekanik Robot Bagian ini
BAB III PERANCANGAN. Gambar 3.1 Blok Diagram Sistem
 BAB III PERANCANGAN Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, perangkat lunak dari algoritma robot, serta metode pengujian robot. 3.1. Sistem Kontrol Robot Kontrol utama robot
BAB III PERANCANGAN Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, perangkat lunak dari algoritma robot, serta metode pengujian robot. 3.1. Sistem Kontrol Robot Kontrol utama robot
ROBOT CERDAS BERKAKI PEMADAM API
 168 Jupii: ROBOT CERDAS BERKAKI PEMADAM API ROBOT CERDAS BERKAKI PEMADAM API Keen Jupii 1), Ferry A.V. Toar 2) E-mail: te_02002@yahoo.com, toar@mail.wima.ac.id. ABSTRAK Pembuatan robot cerdas ini di latar
168 Jupii: ROBOT CERDAS BERKAKI PEMADAM API ROBOT CERDAS BERKAKI PEMADAM API Keen Jupii 1), Ferry A.V. Toar 2) E-mail: te_02002@yahoo.com, toar@mail.wima.ac.id. ABSTRAK Pembuatan robot cerdas ini di latar
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Bab ini berisi penjelasan mengenai perancangan sistem baik bagian mekanik, perangkat lunak dan algoritma robot, serta metode pengujian yang akan dilakukan. 3.1. Perancangan Mekanik
BAB III PERANCANGAN SISTEM Bab ini berisi penjelasan mengenai perancangan sistem baik bagian mekanik, perangkat lunak dan algoritma robot, serta metode pengujian yang akan dilakukan. 3.1. Perancangan Mekanik
BAB I PENDAHULUAN. dengan berbagai macam kategori yang di adakan saat ini,mulai dengan tingkat kesulitan
 BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi modern dewasa ini khususnya dalam dunia teknologi robotika mengalami perkembangan yang sangat pesat. Sangat banyak jenis perlombaan robot dengan berbagai
BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi modern dewasa ini khususnya dalam dunia teknologi robotika mengalami perkembangan yang sangat pesat. Sangat banyak jenis perlombaan robot dengan berbagai
BAB I PENDAHULUAN. Universitas Kristen Maranatha
 BAB I PENDAHULUAN Bab ini berisi tentang latar belakang, identifikasi masalah, perumusan masalah, tujuan, pembatasan masalah, spesifikasi alat, dan sistematika penulisan laporan tugas akhir. I.1 Latar
BAB I PENDAHULUAN Bab ini berisi tentang latar belakang, identifikasi masalah, perumusan masalah, tujuan, pembatasan masalah, spesifikasi alat, dan sistematika penulisan laporan tugas akhir. I.1 Latar
Kata kunci: Algoritma identifikasi ruang, robot berkaki enam, sensor jarak, sensor fotodioda, kompas elektronik
 Pengembangan Robot Berkaki Enam yang dapat Mengidentifikasi Ruang pada Map Kontes Robot Pemadam Api Indonesia menggunakan Algoritma Pengenalan Karakter Ruang Daniel Santoso 1, Deddy Susilo 2, Jati Wasesa
Pengembangan Robot Berkaki Enam yang dapat Mengidentifikasi Ruang pada Map Kontes Robot Pemadam Api Indonesia menggunakan Algoritma Pengenalan Karakter Ruang Daniel Santoso 1, Deddy Susilo 2, Jati Wasesa
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api
 Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
Implementasi Sistem Navigasi Behavior Based Robotic dan Kontroler Fuzzy pada Manuver Robot Cerdas Pemadam Api Rully Muhammad Iqbal NRP 2210105011 Dosen Pembimbing: Rudy Dikairono, ST., MT Dr. Tri Arief
BAB III PERANCANGAN DAN PEMBUATAN ALAT
 BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Gambaran Umum Bab ini akan membahas mengenai perencanaan dan pembuatan robot meliputi perancangan perangkat keras / hardware, pembuatan mekanika robot dan pembuatan
BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Gambaran Umum Bab ini akan membahas mengenai perencanaan dan pembuatan robot meliputi perancangan perangkat keras / hardware, pembuatan mekanika robot dan pembuatan
Mikrokontroler difungsikan sebagai pengendali utama dari sistem yang berguna untuk membaca data sensor, mengolah data dan kemudian memberikan
 BAB II DASAR TEORI Pada bab ini akan membahas mengenai beberapa teori dan alat-alat pendukung yang digunakan sebagai acuan untuk merealisasikan sistem. Teori-teori yang digunakan dalam pembuatan skripsi
BAB II DASAR TEORI Pada bab ini akan membahas mengenai beberapa teori dan alat-alat pendukung yang digunakan sebagai acuan untuk merealisasikan sistem. Teori-teori yang digunakan dalam pembuatan skripsi
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan mekanik robot, perangkat lunak dari algoritma robot, serta metode pengujian robot. 3.1. Perancangan Mekanik Robot Bagian ini
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai perancangan mekanik robot, perangkat lunak dari algoritma robot, serta metode pengujian robot. 3.1. Perancangan Mekanik Robot Bagian ini
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah
 BAB I PENDAHULUAN 1.1. Latar Belakang Masalah Perkembangan teknologi robotika telah membuat kualitas kehidupan manusia semakin tinggi. Saat ini perkembangan teknologi robotika telah mampu meningkatkan
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah Perkembangan teknologi robotika telah membuat kualitas kehidupan manusia semakin tinggi. Saat ini perkembangan teknologi robotika telah mampu meningkatkan
BAB I PENDAHULUAN. 1.1 Latar Belakang
 1 BAB I PENDAHULUAN Sebelum masuk ke dalam pembahasan mengenai Robot Battle Pencari Boneka dan Pemadam Api, perlu diketahui terlebih dahulu mengenai latar belakang dan pentingnya penulisan skripsi dengan
1 BAB I PENDAHULUAN Sebelum masuk ke dalam pembahasan mengenai Robot Battle Pencari Boneka dan Pemadam Api, perlu diketahui terlebih dahulu mengenai latar belakang dan pentingnya penulisan skripsi dengan
BAB III PERANCANGAN Sistem Kontrol Robot. Gambar 3.1. Blok Diagram Sistem
 BAB III PERANCANGAN Pada bab ini akan dijelaskan mengenai perancangan sistem yang meliputi sistem kontrol logika fuzzy, perancangan perangkat keras robot, dan perancangan perangkat lunak dalam pengimplementasian
BAB III PERANCANGAN Pada bab ini akan dijelaskan mengenai perancangan sistem yang meliputi sistem kontrol logika fuzzy, perancangan perangkat keras robot, dan perancangan perangkat lunak dalam pengimplementasian
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai bentuk perancangan mekanik robot, perangkat lunak dari algoritma pengenalan ruang robot, serta metode pengujian robot. 3.1. Perancangan
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai bentuk perancangan mekanik robot, perangkat lunak dari algoritma pengenalan ruang robot, serta metode pengujian robot. 3.1. Perancangan
BAB II DASAR TEORI 2.1. Kajian Pustaka
 BAB II DASAR TEORI Pada bab ini akan dibahas beberapa teori yang mendukung skripsi. Teori-teori yang digunakan dalam pembuatan skripsi ini terdiri dari kajian pustaka, konsep dasar sistem yang mendukung
BAB II DASAR TEORI Pada bab ini akan dibahas beberapa teori yang mendukung skripsi. Teori-teori yang digunakan dalam pembuatan skripsi ini terdiri dari kajian pustaka, konsep dasar sistem yang mendukung
Oleh : Abi Nawang Gustica Pembimbing : 1. Dr. Muhammad Rivai, ST., MT. 2. Ir. Tasripan, MT.
 Implementasi Sensor Gas pada Kontrol Lengan Robot untuk Mencari Sumber Gas (The Implementation of Gas Sensors on the Robotic Arm Control to Locate Gas Source ) Oleh : Abi Nawang Gustica Pembimbing : 1.
Implementasi Sensor Gas pada Kontrol Lengan Robot untuk Mencari Sumber Gas (The Implementation of Gas Sensors on the Robotic Arm Control to Locate Gas Source ) Oleh : Abi Nawang Gustica Pembimbing : 1.
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan dan Implementasi Pemotong Rumput Lapangan Sepakbola Otomatis dengan Sensor Garis dan Dinding ini, terdapat beberapa masalah
BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan dan Implementasi Pemotong Rumput Lapangan Sepakbola Otomatis dengan Sensor Garis dan Dinding ini, terdapat beberapa masalah
BAB IV ANALISA DAN PENGUJIAN ALAT
 BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Umum Robot merupakan kesatuan kerja dari semua kerja perangkat penyusunnya. Perancangan robot dimulai dengan menggali informasi dari berbagai referensi, temukan ide,
BAB IV ANALISA DAN PENGUJIAN ALAT 4.1 Umum Robot merupakan kesatuan kerja dari semua kerja perangkat penyusunnya. Perancangan robot dimulai dengan menggali informasi dari berbagai referensi, temukan ide,
Pengembangan Algoritma Pengendali Robot. Berkaki Enam untuk Kontes Robot Pemadam
 Pengembangan Algoritma Pengendali Robot Berkaki Enam untuk Kontes Robot Pemadam Api Indonesia Daniel Santoso 1, Deddy Susilo 2, Tri Handoko 3 '-^Program Studi Teknik Elektro, Fakultas Teknik Elektronika
Pengembangan Algoritma Pengendali Robot Berkaki Enam untuk Kontes Robot Pemadam Api Indonesia Daniel Santoso 1, Deddy Susilo 2, Tri Handoko 3 '-^Program Studi Teknik Elektro, Fakultas Teknik Elektronika
RIZAL FEBRIYANTO
 ROBOT PENDETEKSI RUANG BERCAHAYA ULTRAVIOLET SKRIPSI Oleh : RIZAL FEBRIYANTO 0734010243 JURUSAN TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS PEMBANGUNAN NASIONAL VETERAN JAWA TIMUR 2011 ROBOT
ROBOT PENDETEKSI RUANG BERCAHAYA ULTRAVIOLET SKRIPSI Oleh : RIZAL FEBRIYANTO 0734010243 JURUSAN TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS PEMBANGUNAN NASIONAL VETERAN JAWA TIMUR 2011 ROBOT
IMPLEMENTASI SISTEM NAVIGASI ROBOT WALL FOLLOWING DENGAN METODE FUZZY LOGIC UNTUK ROBOT PEMADAM API ABIMANYU PADA KRPAI TAHUN 2016
 IMPLEMENTASI SISTEM NAVIGASI ROBOT WALL FOLLOWING DENGAN METODE FUZZY LOGIC UNTUK ROBOT PEMADAM API ABIMANYU PADA KRPAI TAHUN 2016 SKRIPSI Diajukan Untuk Memenuhi Sebagai Syarat Guna Memperoleh Gelar Sarjana
IMPLEMENTASI SISTEM NAVIGASI ROBOT WALL FOLLOWING DENGAN METODE FUZZY LOGIC UNTUK ROBOT PEMADAM API ABIMANYU PADA KRPAI TAHUN 2016 SKRIPSI Diajukan Untuk Memenuhi Sebagai Syarat Guna Memperoleh Gelar Sarjana
PRESENTASI TUGAS AKHIR. Oleh : M. NUR SHOBAKH
 PRESENTASI TUGAS AKHIR PENGEMBANGAN ROBOT PENGIKUT GARIS BERBASIS MIKROKONTROLER SEBAGAI MEJA PENGANTAR MAKANAN OTOMATIS Oleh : M. NUR SHOBAKH 2108 030 061 DOSEN PEMBIMBING : Dr. Ir. Bambang Sampurno,
PRESENTASI TUGAS AKHIR PENGEMBANGAN ROBOT PENGIKUT GARIS BERBASIS MIKROKONTROLER SEBAGAI MEJA PENGANTAR MAKANAN OTOMATIS Oleh : M. NUR SHOBAKH 2108 030 061 DOSEN PEMBIMBING : Dr. Ir. Bambang Sampurno,
Rancang Bangun Prototipe Kapal Tanpa Awak Menggunakan Mikrokontroler
 Rancang Bangun Prototipe Kapal Tanpa Awak Menggunakan Mikrokontroler Dosen Pembimbing: Suwito, ST., MT. Yoga Uta Nugraha 2210 039 025 Ainul Khakim 2210 039 026 Jurusan D3 Teknik Elektro Fakultas Teknologi
Rancang Bangun Prototipe Kapal Tanpa Awak Menggunakan Mikrokontroler Dosen Pembimbing: Suwito, ST., MT. Yoga Uta Nugraha 2210 039 025 Ainul Khakim 2210 039 026 Jurusan D3 Teknik Elektro Fakultas Teknologi
PERANCANGAN ROBOT DENGAN SENSOR UV-TRON R9454 BERBASIS MIKROKONTROLER ATMEL 89S51 SKRIPSI
 PERANCANGAN ROBOT DENGAN SENSOR UV-TRON R9454 BERBASIS MIKROKONTROLER ATMEL 89S51 SKRIPSI Oleh : DIMAS BIMA SAPUTRA NPM : 0634010095 JURUSAN TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI - FTI UNIVERSITAS
PERANCANGAN ROBOT DENGAN SENSOR UV-TRON R9454 BERBASIS MIKROKONTROLER ATMEL 89S51 SKRIPSI Oleh : DIMAS BIMA SAPUTRA NPM : 0634010095 JURUSAN TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI - FTI UNIVERSITAS
BAB III METODE PENELITIAN. diperlukan dengan beberapa cara yang dilakukan, antara lain:
 BAB III METODE PENELITIAN Dalam pembuatan kendali robot omni dengan accelerometer dan keypad pada smartphone dilakukan beberapa tahapan awal yaitu pengumpulan data yang diperlukan dengan beberapa cara
BAB III METODE PENELITIAN Dalam pembuatan kendali robot omni dengan accelerometer dan keypad pada smartphone dilakukan beberapa tahapan awal yaitu pengumpulan data yang diperlukan dengan beberapa cara
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai konsep dasar sistem, perancangan mekanik robot, perangkat lunak dari algoritma robot, serta metode pengujian robot. 2.1.Konsep Dasar Sistem
BAB III PERANCANGAN SISTEM Pada bab ini akan dijelaskan mengenai konsep dasar sistem, perancangan mekanik robot, perangkat lunak dari algoritma robot, serta metode pengujian robot. 2.1.Konsep Dasar Sistem
PERANCANGAN ROBOT DENGAN SENSOR UV-TRON R9454 BERBASIS MIKROKONTROLER ATMEL 89S51 TUGAS AKHIR. Diajukan Guna Memenuhi Sebagian Persyaratan
 PERANCANGAN ROBOT DENGAN SENSOR UV-TRON R9454 BERBASIS MIKROKONTROLER ATMEL 89S51 TUGAS AKHIR Diajukan Guna Memenuhi Sebagian Persyaratan Untuk Memperoleh Gelar Sarjana Komputer Pada Jurusan Teknik Informatika
PERANCANGAN ROBOT DENGAN SENSOR UV-TRON R9454 BERBASIS MIKROKONTROLER ATMEL 89S51 TUGAS AKHIR Diajukan Guna Memenuhi Sebagian Persyaratan Untuk Memperoleh Gelar Sarjana Komputer Pada Jurusan Teknik Informatika
TUGAS AKHIR TE
 TUGAS AKHIR TE 090362 KARTU TOL ELEKTRONIK MENGGUNAKAN RFID (RADIO FREQUENCY IDENTIFICATION) BERBASIS WEB DOSEN PEMBIMBING PUJIONO, S.T., M.T. PROGRAM STUDI D3 TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
TUGAS AKHIR TE 090362 KARTU TOL ELEKTRONIK MENGGUNAKAN RFID (RADIO FREQUENCY IDENTIFICATION) BERBASIS WEB DOSEN PEMBIMBING PUJIONO, S.T., M.T. PROGRAM STUDI D3 TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
PERANCANGAN SISTEM KENDALI GERAKAN ROBOT BERODA TIGA UNTUK PEMBERSIH LANTAI
 PERANCANGAN SISTEM KENDALI GERAKAN ROBOT BERODA TIGA UNTUK PEMBERSIH LANTAI Muhammad Firman S. NRP 2210 030 005 Muchamad Rizqy NRP 2210 030 047 Dosen Pembimbing Ir. Rusdhianto Effendie AK, M.T NIP. 19570424
PERANCANGAN SISTEM KENDALI GERAKAN ROBOT BERODA TIGA UNTUK PEMBERSIH LANTAI Muhammad Firman S. NRP 2210 030 005 Muchamad Rizqy NRP 2210 030 047 Dosen Pembimbing Ir. Rusdhianto Effendie AK, M.T NIP. 19570424
Media Informatika Vol. 15 No. 2 (2016) SIMULASI ROBOT LINE FOLLOWER DENGAN PROTEUS. Sudimanto
 SIMULASI ROBOT LINE FOLLOWER DENGAN PROTEUS. Sudimanto") Media Informatika Vol. 15 No. 2 (2016) SIMULASI ROBOT LINE FOLLOWER DENGAN PROTEUS Sudimanto Sekolah Tinggi Manajemen Informatika dan computer LIKMI Jl. Ir. H. Juanda 96 Bandung 40132 E-mail : sudianen@yahoo.com
Media Informatika Vol. 15 No. 2 (2016) SIMULASI ROBOT LINE FOLLOWER DENGAN PROTEUS Sudimanto Sekolah Tinggi Manajemen Informatika dan computer LIKMI Jl. Ir. H. Juanda 96 Bandung 40132 E-mail : sudianen@yahoo.com
BAB II DASAR TEORI. Pada bab ini akan dibahas teori-teori pendukung yang digunakan sebagai acuan dalam merancang algoritma.
 BAB II DASAR TEORI Pada bab ini akan dibahas teori-teori pendukung yang digunakan sebagai acuan dalam merancang algoritma. 2.1. Mikrokontroler ATMega 128 Mikrokontroler merupakan sebuah sistem komputer
BAB II DASAR TEORI Pada bab ini akan dibahas teori-teori pendukung yang digunakan sebagai acuan dalam merancang algoritma. 2.1. Mikrokontroler ATMega 128 Mikrokontroler merupakan sebuah sistem komputer
Implementasi Sistem Navigasi Maze Mapping Pada Robot Beroda Pemadam Api
 Implementasi Sistem Navigasi Maze Mapping Pada Robot Beroda Pemadam Api Disusun Oleh: Nama : Nelson Mandela Sitepu NRP : 0922043 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha,
Implementasi Sistem Navigasi Maze Mapping Pada Robot Beroda Pemadam Api Disusun Oleh: Nama : Nelson Mandela Sitepu NRP : 0922043 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Kristen Maranatha,
IMPLEMENTASI SISTEM NAVIGASI ROBOT WALL FOLLOWING DENGAN METODE FUZZY LOGIC MODEL TSUKAMOTO UNTUK ROBOT PEMADAM API
 IMPLEMENTASI SISTEM NAVIGASI ROBOT WALL FOLLOWING DENGAN METODE FUZZY LOGIC MODEL TSUKAMOTO UNTUK ROBOT PEMADAM API SKRIPSI Diajukan Untuk Memenuhi Sebagai Syarat Guna Memperoleh Gelar Sarjana Komputer
IMPLEMENTASI SISTEM NAVIGASI ROBOT WALL FOLLOWING DENGAN METODE FUZZY LOGIC MODEL TSUKAMOTO UNTUK ROBOT PEMADAM API SKRIPSI Diajukan Untuk Memenuhi Sebagai Syarat Guna Memperoleh Gelar Sarjana Komputer
SISTEM ROBOT PENGIKUT GARIS DAN PEMADAM API BERBASIS MIKROKONTROLER AT89C51. Budi Rahmani, Djoko Dwijo Riyadi ABSTRAK
 SISTEM ROBOT PENGIKUT GARIS DAN PEMADAM API BERBASIS MIKROKONTROLER AT89C51 Budi Rahmani, Djoko Dwijo Riyadi ABSTRAK Robot Pengikut Garis merupakan suatu bentuk robot bergerak otonom yang mempunyai misi
SISTEM ROBOT PENGIKUT GARIS DAN PEMADAM API BERBASIS MIKROKONTROLER AT89C51 Budi Rahmani, Djoko Dwijo Riyadi ABSTRAK Robot Pengikut Garis merupakan suatu bentuk robot bergerak otonom yang mempunyai misi
PERANCANGAN KONTROLER LOGIKA FUZZY UNTUK TRACKING CONTROL PADA ROBOT SUMO
 PERANCANGAN KONTROLER LOGIKA FUZZY UNTUK TRACKING CONTROL PADA ROBOT SUMO STANDAR OPERASI PROSEDUR (S.O.P) Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro
PERANCANGAN KONTROLER LOGIKA FUZZY UNTUK TRACKING CONTROL PADA ROBOT SUMO STANDAR OPERASI PROSEDUR (S.O.P) Disusun Untuk Memenuhi Syarat Menyelesaikan Pendidikan Diploma III Pada Jurusan Teknik Elektro
BAB IV IMPLEMENTASI DAN ANALISIS. pengukuran bahan bakar minyak pada tangki SPBU ini terbagi dalam dua
 BAB IV IMPLEMENTASI DAN ANALISIS 4.1. Perangkat keras Perangkat keras yang digunakan dalam sistem monitoring pengukuran bahan bakar minyak pada tangki SPBU ini terbagi dalam dua bagian yang saling berhubungan,
BAB IV IMPLEMENTASI DAN ANALISIS 4.1. Perangkat keras Perangkat keras yang digunakan dalam sistem monitoring pengukuran bahan bakar minyak pada tangki SPBU ini terbagi dalam dua bagian yang saling berhubungan,
DESAIN DAN IMPLEMETASI GRID-BASED MAP SEBAGAI SISTEM PENGENALAN POSISI PADA KONTES ROBOT PEMADAM API INDONESIA (KRPAI) DIVISI BERODA
 DIVISI BERODA") DESAIN DAN IMPLEMETASI GRID-BASED MAP SEBAGAI SISTEM PENGENALAN POSISI PADA KONTES ROBOT PEMADAM API INDONESIA (KRPAI) DIVISI BERODA Publikasi Jurnal Skripsi Disusun Oleh : NUR ISKANDAR JUANG NIM : 0910630083-63
DESAIN DAN IMPLEMETASI GRID-BASED MAP SEBAGAI SISTEM PENGENALAN POSISI PADA KONTES ROBOT PEMADAM API INDONESIA (KRPAI) DIVISI BERODA Publikasi Jurnal Skripsi Disusun Oleh : NUR ISKANDAR JUANG NIM : 0910630083-63
BAB III ANALISIS MASALAH DAN RANCANGAN ALAT
 BAB III ANALISIS MASALAH DAN RANCANGAN ALAT III.1. Analisa Permasalahan Masalah yang dihadapi adalah bagaimana untuk menetaskan telur ayam dalam jumlah banyak dan dalam waktu yang bersamaan. Karena kemampuan
BAB III ANALISIS MASALAH DAN RANCANGAN ALAT III.1. Analisa Permasalahan Masalah yang dihadapi adalah bagaimana untuk menetaskan telur ayam dalam jumlah banyak dan dalam waktu yang bersamaan. Karena kemampuan
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi robot sudah berkembang dengan pesat pada saat ini, mulai dari robot sederhana untuk aplikasi yang mudah sampai dengan robot canggih dan kompleks yang digunakan
BAB I PENDAHULUAN 1.1 Latar Belakang Teknologi robot sudah berkembang dengan pesat pada saat ini, mulai dari robot sederhana untuk aplikasi yang mudah sampai dengan robot canggih dan kompleks yang digunakan
ROBOT PENGURAI ASAP DALAM RUANGAN MENGGUNAKAN T-BOX DENGAN METODE BEHAVIOUR BASED CONTROL
 ROBOT PENGURAI ASAP DALAM RUANGAN MENGGUNAKAN T-BOX DENGAN METODE BEHAVIOUR BASED CONTROL Anggara Trisna Nugraha 1),Ichal Haichal S 2) 1) Jurusan Teknik Elektro, Fakultas Teknik, Institut Teknologi Sepuluh
ROBOT PENGURAI ASAP DALAM RUANGAN MENGGUNAKAN T-BOX DENGAN METODE BEHAVIOUR BASED CONTROL Anggara Trisna Nugraha 1),Ichal Haichal S 2) 1) Jurusan Teknik Elektro, Fakultas Teknik, Institut Teknologi Sepuluh
PENGAPLIKAISAN TPA81 DAN CMPS03 PADA RANCANG BANGUN ROBOT BERODA KRPAI Ari Bengnarly (1), Hendi Wicaksono (2)
, Hendi Wicaksono (2)") PENGAPLIKAISAN TPA81 DAN CMPS03 PADA RANCANG BANGUN ROBOT BERODA KRPAI 2013 Ari Bengnarly (1), Hendi Wicaksono (2) (1), (2) Teknik Elektro Universitas Surabaya Bengnarly@gmail.com (1), Hendi@ubaya.ac.id
PENGAPLIKAISAN TPA81 DAN CMPS03 PADA RANCANG BANGUN ROBOT BERODA KRPAI 2013 Ari Bengnarly (1), Hendi Wicaksono (2) (1), (2) Teknik Elektro Universitas Surabaya Bengnarly@gmail.com (1), Hendi@ubaya.ac.id
ROBOT CERDAS PEMADAM API MENGGUNAKAN PING ULTRASONIC RANGE FINDER DAN UVTRON FLAME DETECTOR BERBASIS MIKROKONTROLER ATMEGA 128
 ISSN 1412 3762 http://jurnal.upi.edu/electrans ELECTRANS, VOL.12, NO.1, MARET 2013, 29-38 ROBOT CERDAS PEMADAM API MENGGUNAKAN PING ULTRASONIC RANGE FINDER DAN UVTRON FLAME DETECTOR BERBASIS MIKROKONTROLER
ISSN 1412 3762 http://jurnal.upi.edu/electrans ELECTRANS, VOL.12, NO.1, MARET 2013, 29-38 ROBOT CERDAS PEMADAM API MENGGUNAKAN PING ULTRASONIC RANGE FINDER DAN UVTRON FLAME DETECTOR BERBASIS MIKROKONTROLER
III. METODE PENELITIAN. Perancangan sistem dilakukan dari bulan Maret sampai Juni 2014, bertempat di
 III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Perancangan sistem dilakukan dari bulan Maret sampai Juni 2014, bertempat di Laboratorium Terpadu Teknik Elektro, Jurusan Teknik Elektro, Universitas
III. METODE PENELITIAN A. Waktu dan Tempat Penelitian Perancangan sistem dilakukan dari bulan Maret sampai Juni 2014, bertempat di Laboratorium Terpadu Teknik Elektro, Jurusan Teknik Elektro, Universitas
PERANCANGAN PROTOTYPE ROBOT SOUND TRACKER BERBASIS MIKROKONTROLER DENGAN METODE FUZZY LOGIC
 PERANCANGAN PROTOTYPE ROBOT SOUND TRACKER BERBASIS MIKROKONTROLER DENGAN METODE FUZZY LOGIC SKRIPSI Oleh MUHAMMAD RENDRA TRIASMARA NIM 071910201015 PROGRAM STUDI STRATA-1 TEKNIK ELEKTRO JURUSAN TEKNIK
PERANCANGAN PROTOTYPE ROBOT SOUND TRACKER BERBASIS MIKROKONTROLER DENGAN METODE FUZZY LOGIC SKRIPSI Oleh MUHAMMAD RENDRA TRIASMARA NIM 071910201015 PROGRAM STUDI STRATA-1 TEKNIK ELEKTRO JURUSAN TEKNIK
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT 3.1 BLOK DIAGRAM Pada perancangan tugas akhir ini saya merancang sistem dengan blok diagram yang dapat dilihat pada gambar 3.1. Gambar 3.1. Blok Diagram Dari blok diagram pusat
BAB III PERANCANGAN ALAT 3.1 BLOK DIAGRAM Pada perancangan tugas akhir ini saya merancang sistem dengan blok diagram yang dapat dilihat pada gambar 3.1. Gambar 3.1. Blok Diagram Dari blok diagram pusat
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan Negara kepulauan dengan panjang pantai 81.000 Km dimana ± 2/3 wilayah kedaulatannya berupa perairan. Dengan memanfaatkan potensi wilayah ini banyak
BAB I PENDAHULUAN 1.1 Latar Belakang Indonesia merupakan Negara kepulauan dengan panjang pantai 81.000 Km dimana ± 2/3 wilayah kedaulatannya berupa perairan. Dengan memanfaatkan potensi wilayah ini banyak
PERANCANGAN ALGORITMA DAN PROGRAM ROBOT CERDAS PEMADAM API 2013 DIVISI BERKAKI
 ISSN 1412 3762 http://jurnal.upi.edu/electrans ELECRANS, VOL.13, NO.2, SEPEMBER 2014, 195-200 PERANCANGAN ALGORIMA DAN PROGRAM ROBO CERDAS PEMADAM API 2013 DIVISI BERKAKI Wawan Purnama, Regina Puspitasari,
ISSN 1412 3762 http://jurnal.upi.edu/electrans ELECRANS, VOL.13, NO.2, SEPEMBER 2014, 195-200 PERANCANGAN ALGORIMA DAN PROGRAM ROBO CERDAS PEMADAM API 2013 DIVISI BERKAKI Wawan Purnama, Regina Puspitasari,
BAB III PERANCANGAN SISTEM
 31 BAB III PERANCANGAN SISTEM 3.1 Diagram Blok Air ditampung pada wadah yang nantinya akan dialirkan dengan menggunakan pompa. Pompa akan menglirkan air melalui saluran penghubung yang dibuat sedemikian
31 BAB III PERANCANGAN SISTEM 3.1 Diagram Blok Air ditampung pada wadah yang nantinya akan dialirkan dengan menggunakan pompa. Pompa akan menglirkan air melalui saluran penghubung yang dibuat sedemikian
BAB 3 PERANCANGAN SISTEM
 BAB 3 PERANCANGAN SISTEM 3.1 Perancangan Perangkat Keras 3.1.1 Blok Diagram Sistem Gambaran sistem dapat dilihat pada blok diagram sistem di bawah ini : Gambar 3.1 Blok Diagram Sistem Berdasarkan blok
BAB 3 PERANCANGAN SISTEM 3.1 Perancangan Perangkat Keras 3.1.1 Blok Diagram Sistem Gambaran sistem dapat dilihat pada blok diagram sistem di bawah ini : Gambar 3.1 Blok Diagram Sistem Berdasarkan blok
BAB III PERANCANGAN DAN CARA KERJA SISTEM. Pada bab ini diterangkan tentang langkah dalam merancang cara kerja
 BAB III PERANCANGAN DAN CARA KERJA SISTEM Pada bab ini diterangkan tentang langkah dalam merancang cara kerja sistem, baik secara keseluruhan ataupun kinerja dari bagian-bagian sistem pendukung. Perancangan
BAB III PERANCANGAN DAN CARA KERJA SISTEM Pada bab ini diterangkan tentang langkah dalam merancang cara kerja sistem, baik secara keseluruhan ataupun kinerja dari bagian-bagian sistem pendukung. Perancangan
TPA81 Thermopile Array
 TPA81 Thermopile Array 1. Karakteristik Thermopile Array TPA81 dapat mendeteksi sinar infra merah dengan panjang gelombang 2um-22um (1mikro meter = sepersejuta meter). Panjang gelombang ini dihasilkan
TPA81 Thermopile Array 1. Karakteristik Thermopile Array TPA81 dapat mendeteksi sinar infra merah dengan panjang gelombang 2um-22um (1mikro meter = sepersejuta meter). Panjang gelombang ini dihasilkan
SISTEM KENDALI JARAK JAUH MINIATUR TANK TANPA AWAK
 SISTEM KENDALI JARAK JAUH MINIATUR TANK TANPA AWAK OLEH : Eko Efendi (2211030009) Dio Adya Pratama (2211030036) Dosen Pembimbing : Suwito ST.,MT NIP. 19810105 200501 1004 Latar Belakang Meminimalisir prajurit
SISTEM KENDALI JARAK JAUH MINIATUR TANK TANPA AWAK OLEH : Eko Efendi (2211030009) Dio Adya Pratama (2211030036) Dosen Pembimbing : Suwito ST.,MT NIP. 19810105 200501 1004 Latar Belakang Meminimalisir prajurit
Perancangan Fuzzy Logic Model Sugeno untuk Wall Tracking pada Robot Pemadam Api
 Jurnal ELEMENTER. Vol. 1, No. 1, Mei 2015 1 Jurnal Politeknik Caltex Riau http://jurnal.pcr.ac.id Perancangan Fuzzy Logic Model Sugeno untuk Wall Tracking pada Robot Pemadam Api Ari Azhar 1, Kartina Diah
Jurnal ELEMENTER. Vol. 1, No. 1, Mei 2015 1 Jurnal Politeknik Caltex Riau http://jurnal.pcr.ac.id Perancangan Fuzzy Logic Model Sugeno untuk Wall Tracking pada Robot Pemadam Api Ari Azhar 1, Kartina Diah
BAB III ANALISIS DAN PERANCANGAN
 BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan dan Implementasi Penyaji Minuman Otomatis Berbasis Mikrokontroler ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan
BAB III ANALISIS DAN PERANCANGAN III.1. Analisis Permasalahan Dalam Perancangan dan Implementasi Penyaji Minuman Otomatis Berbasis Mikrokontroler ini, terdapat beberapa masalah yang harus dipecahkan. Permasalahan-permasalahan
BAB IV ANALISA DAN PENGUJIAN
 BAB IV ANALISA DAN PENGUJIAN 4.1. Pengujian Alat Sebelum menjalankan atau melakukan pengoprasian robot yang telah dibuat, maka penulis akan melakukan pengujian pada robot yang telah dibuat untuk mengetahui
BAB IV ANALISA DAN PENGUJIAN 4.1. Pengujian Alat Sebelum menjalankan atau melakukan pengoprasian robot yang telah dibuat, maka penulis akan melakukan pengujian pada robot yang telah dibuat untuk mengetahui
BAB 3 PERANCANGAN SISTEM. pada sistem pengendali lampu telah dijelaskan pada bab 2. Pada bab ini akan dijelaskan
 BAB 3 PERANCANGAN SISTEM Konsep dasar mengendalikan lampu dan komponen komponen yang digunakan pada sistem pengendali lampu telah dijelaskan pada bab 2. Pada bab ini akan dijelaskan perancangan sistem
BAB 3 PERANCANGAN SISTEM Konsep dasar mengendalikan lampu dan komponen komponen yang digunakan pada sistem pengendali lampu telah dijelaskan pada bab 2. Pada bab ini akan dijelaskan perancangan sistem
ROBOT PENGHINDAR HALANGAN DENGAN MIKROKONTROLER AT89C51
 ROBOT PENGHINDAR HALANGAN DENGAN MIKROKONTROLER AT89C51 SKRIPSI Oleh : FREGHA HARYANSYAH 0534010073 JURUSAN TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS PEMBANGUNAN NASIONAL VETERAN JAWA
ROBOT PENGHINDAR HALANGAN DENGAN MIKROKONTROLER AT89C51 SKRIPSI Oleh : FREGHA HARYANSYAH 0534010073 JURUSAN TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS PEMBANGUNAN NASIONAL VETERAN JAWA
Grafik hubungan antara Jarak (cm) terhadap Data pengukuran (cm) y = 0.950x Data pengukuran (cm) Gambar 9 Grafik fungsi persamaan gradien
 terhadap Data pengukuran (cm) y = 0.950x Data pengukuran (cm) Gambar 9 Grafik fungsi persamaan gradien") dapat bekerja tetapi tidak sempurna. Oleh karena itu, agar USART bekerja dengan baik dan sempurna, maka error harus diperkecil sekaligus dihilangkan. Cara menghilangkan error tersebut digunakan frekuensi
dapat bekerja tetapi tidak sempurna. Oleh karena itu, agar USART bekerja dengan baik dan sempurna, maka error harus diperkecil sekaligus dihilangkan. Cara menghilangkan error tersebut digunakan frekuensi
BAB III PERANCANGAN DAN PEMBUATAN APLIKASI
 BAB III PERANCANGAN DAN PEMBUATAN APLIKASI Dalam bab ini akan dibahas mengenai perancangan dan pembuatan aplikasi dengan menggunakan metodologi perancangan prototyping, prinsip kerja rangkaian berdasarkan
BAB III PERANCANGAN DAN PEMBUATAN APLIKASI Dalam bab ini akan dibahas mengenai perancangan dan pembuatan aplikasi dengan menggunakan metodologi perancangan prototyping, prinsip kerja rangkaian berdasarkan
BAB III PERENCANGAN DAN PEMBUATAN ALAT
 BAB III PERENCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas pembuatan dan perancangan seluruh sistem perangkat dari Sistem Perancangan Parkir Otomatis berbasis Arduino dengan Menggunakan Identifikasi
BAB III PERENCANGAN DAN PEMBUATAN ALAT Dalam bab ini akan dibahas pembuatan dan perancangan seluruh sistem perangkat dari Sistem Perancangan Parkir Otomatis berbasis Arduino dengan Menggunakan Identifikasi
BAB IV PENGUJIAN DAN ANALISA ALAT
 55 BAB IV PENGUJIAN DAN ANALISA ALAT Untuk tahap selanjutnya setelah melakukan perancangan dan pembuatan alat maka langkah berikut nya adalah pengujian dan menganalisa alat yang telah dibuat, agar tujuan
55 BAB IV PENGUJIAN DAN ANALISA ALAT Untuk tahap selanjutnya setelah melakukan perancangan dan pembuatan alat maka langkah berikut nya adalah pengujian dan menganalisa alat yang telah dibuat, agar tujuan
BAB III ANALISIS DAN DESAIN SISTEM
 BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan dan implementasi wajah animatronik berbasis mikrokontroler ini menggunakan beberapa metode rancang bangun yang pembuatannya
BAB III ANALISIS DAN DESAIN SISTEM III.1. Analisis Masalah Dalam perancangan dan implementasi wajah animatronik berbasis mikrokontroler ini menggunakan beberapa metode rancang bangun yang pembuatannya
BAB IV HASIL DAN UJI COBA
 BAB IV HASIL DAN UJI COBA IV.1. Software Instalasi merupakan hal yang sangat penting karena merupakan proses penginputan data dari komputer ke dalam mikrokontroler. Sebelum melakukan instalasi, hubungkan
BAB IV HASIL DAN UJI COBA IV.1. Software Instalasi merupakan hal yang sangat penting karena merupakan proses penginputan data dari komputer ke dalam mikrokontroler. Sebelum melakukan instalasi, hubungkan
BAB III PERANCANGAN. 3.1 Perancangan mekanik
 BAB III PERANCANGAN 3.1 Perancangan mekanik Dalam perancangan mekanik robot ini saya menggunakan software AutoCad 2009 untuk mendesign mekanik dan untuk bahan saya menggunakan Acrylic dengan ketebalan
BAB III PERANCANGAN 3.1 Perancangan mekanik Dalam perancangan mekanik robot ini saya menggunakan software AutoCad 2009 untuk mendesign mekanik dan untuk bahan saya menggunakan Acrylic dengan ketebalan
PERANCANGAN DAN ANALISIS PERBANDINGAN POSISI SENSOR GARIS PADA ROBOT MANAGEMENT SAMPAH
 PERANCANGAN DAN ANALISIS PERBANDINGAN POSISI SENSOR GARIS PADA ROBOT MANAGEMENT SAMPAH Bambang Dwi Prakoso Jurusan Teknik Elektro Universitas Brawijaya Dosen Pembimbing : Sholeh Hadi Pramono, Eka Maulana
PERANCANGAN DAN ANALISIS PERBANDINGAN POSISI SENSOR GARIS PADA ROBOT MANAGEMENT SAMPAH Bambang Dwi Prakoso Jurusan Teknik Elektro Universitas Brawijaya Dosen Pembimbing : Sholeh Hadi Pramono, Eka Maulana
Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini. Helmi Wiratran
 Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini 1 Helmi Wiratran 2209105020 2 Latarbelakang (1) Segway PT: Transportasi alternatif dengan
Perancangan dan Implementasi Embedded Fuzzy Logic Controller Untuk Pengaturan Kestabilan Gerak Robot Segway Mini 1 Helmi Wiratran 2209105020 2 Latarbelakang (1) Segway PT: Transportasi alternatif dengan
BAB IV PENGUJIAN ALAT DAN ANALISA
 BAB IV Pengujian Alat dan Analisa BAB IV PENGUJIAN ALAT DAN ANALISA 4. Tujuan Pengujian Pada bab ini dibahas mengenai pengujian yang dilakukan terhadap rangkaian sensor, rangkaian pembalik arah putaran
BAB IV Pengujian Alat dan Analisa BAB IV PENGUJIAN ALAT DAN ANALISA 4. Tujuan Pengujian Pada bab ini dibahas mengenai pengujian yang dilakukan terhadap rangkaian sensor, rangkaian pembalik arah putaran
REALISASI ROBOT CERDAS PEMADAM API LILIN DENGAN KONFIGURASI LAPANGAN YANG BERUBAH-UBAH ABSTRAK
 REALISASI ROBOT CERDAS PEMADAM API LILIN DENGAN KONFIGURASI LAPANGAN YANG BERUBAH-UBAH Disusun Oleh: Nama : Ratana Chanda Sutjiono NRP : 0422021 Jurusan Teknik Elektro, Fakultas Teknik,, Jl. Prof.Drg.Suria
REALISASI ROBOT CERDAS PEMADAM API LILIN DENGAN KONFIGURASI LAPANGAN YANG BERUBAH-UBAH Disusun Oleh: Nama : Ratana Chanda Sutjiono NRP : 0422021 Jurusan Teknik Elektro, Fakultas Teknik,, Jl. Prof.Drg.Suria
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem pengendalian ketinggian air. 3.1. Gambaran Alat
BAB III PERANCANGAN ALAT Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem pengendalian ketinggian air. 3.1. Gambaran Alat
BAB V IMPLEMENTASI DAN PENGUJIAN
 BAB V IMPLEMENTASI DAN PENGUJIAN Pada bab ini penulis menjelaskan mengenai langkah-langkah praktek untuk melakukan penerapan terhadap perancangan yang telah dijelaskan pada bab sebelumnya. Implementasi
BAB V IMPLEMENTASI DAN PENGUJIAN Pada bab ini penulis menjelaskan mengenai langkah-langkah praktek untuk melakukan penerapan terhadap perancangan yang telah dijelaskan pada bab sebelumnya. Implementasi
BAB III PERANCANGAN. Pada bab ini akan dibahas mengenai beberapa hal dasar tentang bagaimana. simulasi mobil automatis dirancang, diantaranya adalah :
 BAB III PERANCANGAN Pada bab ini akan dibahas mengenai beberapa hal dasar tentang bagaimana simulasi mobil automatis dirancang, diantaranya adalah : 1. Menentukan tujuan dan kondisi pembuatan simulasi
BAB III PERANCANGAN Pada bab ini akan dibahas mengenai beberapa hal dasar tentang bagaimana simulasi mobil automatis dirancang, diantaranya adalah : 1. Menentukan tujuan dan kondisi pembuatan simulasi
Robot Bergerak Penjejak Jalur Bertenaga Sel Surya
 Robot Bergerak Penjejak Jalur Bertenaga Sel Surya Indar Sugiarto, Dharmawan Anugrah, Hany Ferdinando Jurusan Teknik Elektro, Fakultas Teknologi Industri, Universitas Kristen Petra Email: indi@petra.ac.id,
Robot Bergerak Penjejak Jalur Bertenaga Sel Surya Indar Sugiarto, Dharmawan Anugrah, Hany Ferdinando Jurusan Teknik Elektro, Fakultas Teknologi Industri, Universitas Kristen Petra Email: indi@petra.ac.id,
BAB III PERANCANGAN SISTEM
 BAB III PERANCANGAN SISTEM Pada bab ini membahas perencanaan dan pembuatan dari alat yang akan dibuat yaitu Perencanaan dan Pembuatan Pengendali Suhu Ruangan Berdasarkan Jumlah Orang ini memiliki 4 tahapan
BAB III PERANCANGAN SISTEM Pada bab ini membahas perencanaan dan pembuatan dari alat yang akan dibuat yaitu Perencanaan dan Pembuatan Pengendali Suhu Ruangan Berdasarkan Jumlah Orang ini memiliki 4 tahapan
Aplikasi Thermopile Array untuk Thermoscanner Berbasis Mikrokontroler ATmega16. Disusun Oleh : Nama : Wilbert Tannady Nrp :
 Aplikasi Thermopile Array untuk Thermoscanner Berbasis Mikrokontroler ATmega16 Disusun Oleh : Nama : Wilbert Tannady Nrp : 0822080 Jurusan Teknik Elektro, Fakultas Teknik,, Jl. Prof.Drg.Suria Sumantri,
Aplikasi Thermopile Array untuk Thermoscanner Berbasis Mikrokontroler ATmega16 Disusun Oleh : Nama : Wilbert Tannady Nrp : 0822080 Jurusan Teknik Elektro, Fakultas Teknik,, Jl. Prof.Drg.Suria Sumantri,
BAB 3 PERANCANGAN SISTEM. ruangan yang menggunakan led matrix dan sensor PING))). Led matrix berfungsi
)). Led matrix berfungsi") BAB 3 PERANCANGAN SISTEM 3.1 Pengertian Umum Perancangan Media Penyampaian Informasi Otomatis Dengan LED Matrix Berbasis Arduino adalah suatu sistem media penyampaian informasi di dalam ruangan yang menggunakan
BAB 3 PERANCANGAN SISTEM 3.1 Pengertian Umum Perancangan Media Penyampaian Informasi Otomatis Dengan LED Matrix Berbasis Arduino adalah suatu sistem media penyampaian informasi di dalam ruangan yang menggunakan
BAB 3 PERANCANGAN SISTEM
 BAB 3 PERANCANGAN SISTEM Pada bab ini membahas tentang perancangan sistem yang dibuat dimana diantaranya terdiri dari penjelasan perancangan perangkat keras, perancangan piranti lunak dan rancang bangun
BAB 3 PERANCANGAN SISTEM Pada bab ini membahas tentang perancangan sistem yang dibuat dimana diantaranya terdiri dari penjelasan perancangan perangkat keras, perancangan piranti lunak dan rancang bangun
RANCANG BANGUN ROBOT PENGIKUT GARIS DAN PENDETEKSI HALANG RINTANG BERBASIS MIKROKONTROLER AVR SKRIPSI
 1 RANCANG BANGUN ROBOT PENGIKUT GARIS DAN PENDETEKSI HALANG RINTANG BERBASIS MIKROKONTROLER AVR SKRIPSI Oleh Wahyu Adi Nugroho NPM. 0734210306 JURUSAN TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS
1 RANCANG BANGUN ROBOT PENGIKUT GARIS DAN PENDETEKSI HALANG RINTANG BERBASIS MIKROKONTROLER AVR SKRIPSI Oleh Wahyu Adi Nugroho NPM. 0734210306 JURUSAN TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS
BAB III METODOLOGI PENELITIAN
 BAB III METODOLOGI PENELITIAN 3.1 Proses alur penelitian Dalam penelitian ini ada beberapa tahap atau langkah-langkah yang peneliti lakukan mulai dari proses perancangan model hingga hasil akhir dalam
BAB III METODOLOGI PENELITIAN 3.1 Proses alur penelitian Dalam penelitian ini ada beberapa tahap atau langkah-langkah yang peneliti lakukan mulai dari proses perancangan model hingga hasil akhir dalam
TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer
 TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer disusun oleh : MERIZKY ALFAN ADHI HIDAYAT AZZA LAZUARDI JA FAR JUNAIDI 31780 31924
TUGAS MATAKULIAH APLIKASI KOMPUTER DALAM SISTEM TENAGA LISTRIK FINAL REPORT : Pengendalian Motor DC menggunakan Komputer disusun oleh : MERIZKY ALFAN ADHI HIDAYAT AZZA LAZUARDI JA FAR JUNAIDI 31780 31924
BAB IV PENGUJIAN DAN ANALISA
 BAB IV PENGUJIAN DAN ANALISA 4.1 Umum Perancangan robot merupakan aplikasi dari ilmu tentang robotika yang diketahui. Kinerja alat tersebut dapat berjalan sesuai keinginan kita dengan apa yang kita rancang.
BAB IV PENGUJIAN DAN ANALISA 4.1 Umum Perancangan robot merupakan aplikasi dari ilmu tentang robotika yang diketahui. Kinerja alat tersebut dapat berjalan sesuai keinginan kita dengan apa yang kita rancang.
Prodi S1 Teknik Informatika, Fakultas Teknik, Universitas Telkom 1 2
 PERANCANGAN PERANGKAT LUNAK SEBAGAI MEDIA KOMUNIKASI WIRELESS PADA PROTOTIPE ROBOT PELAYAN BERBASIS MIRKOKONTROLER Pandu Widiantoro 1, Novian Anggis Suwastika 2 1,2 Prodi S1 Teknik Informatika, Fakultas
PERANCANGAN PERANGKAT LUNAK SEBAGAI MEDIA KOMUNIKASI WIRELESS PADA PROTOTIPE ROBOT PELAYAN BERBASIS MIRKOKONTROLER Pandu Widiantoro 1, Novian Anggis Suwastika 2 1,2 Prodi S1 Teknik Informatika, Fakultas
BAB I PENDAHULUAN. pemikiran-pemikiran yang inovatif dengan menggunakan peralatan seminimal
 BAB I PENDAHULUAN 1.1 LATAR BELAKANG Perubahan teknologi berkembang begitu pesat, sehingga dibutuhkan pemikiran-pemikiran yang inovatif dengan menggunakan peralatan seminimal mungkin untuk sebuah aplikasi
BAB I PENDAHULUAN 1.1 LATAR BELAKANG Perubahan teknologi berkembang begitu pesat, sehingga dibutuhkan pemikiran-pemikiran yang inovatif dengan menggunakan peralatan seminimal mungkin untuk sebuah aplikasi
BAB I PENDAHULUAN 1.1 Latar Belakang
 BAB I PENDAHULUAN 1.1 Latar Belakang Sistem informasi lingkungan merupakan bagian terpenting dalam kehidupan guna mendukung berbagi bidang industri, transportasi, perusahaan, pemerintahan, dan lingkungan
BAB I PENDAHULUAN 1.1 Latar Belakang Sistem informasi lingkungan merupakan bagian terpenting dalam kehidupan guna mendukung berbagi bidang industri, transportasi, perusahaan, pemerintahan, dan lingkungan
BAB I PENDAHULUAN. berbagai proses pengendalian. Keterbatasan keterbatasan tersebut lambat laun
 BAB I PENDAHULUAN 1.1 Latar Belakang Kemajuan ilmu pengetahuan dan teknologi telah mendorong manusia untuk berusaha mengatasi berbagai permasalahan yang timbul yang disebabkan oleh keterbatasan keterbatasan
BAB I PENDAHULUAN 1.1 Latar Belakang Kemajuan ilmu pengetahuan dan teknologi telah mendorong manusia untuk berusaha mengatasi berbagai permasalahan yang timbul yang disebabkan oleh keterbatasan keterbatasan
BAB IV PENGUJIAN DAN ANALISIS
 BAB IV PENGUJIAN DAN ANALISIS 4.1 Pengukuran Jarak Dengan Sensor Ultrasonik Pengujian dilakukan pada sensor ultrasonik PING))), untuk menentukan jarak sensor terhadap dinding. Data yang diambil merupakan
BAB IV PENGUJIAN DAN ANALISIS 4.1 Pengukuran Jarak Dengan Sensor Ultrasonik Pengujian dilakukan pada sensor ultrasonik PING))), untuk menentukan jarak sensor terhadap dinding. Data yang diambil merupakan
BAB I PENDAHULUAN. sangat pesat, salah satunya adalah adalah dalam bidang robotika. Robot bukanlah
 BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan ilmu pengetahuan dan teknologi akhir-akhir ini memang sangat pesat, salah satunya adalah adalah dalam bidang robotika. Robot bukanlah benda yang hanya
BAB I PENDAHULUAN 1.1 Latar Belakang Perkembangan ilmu pengetahuan dan teknologi akhir-akhir ini memang sangat pesat, salah satunya adalah adalah dalam bidang robotika. Robot bukanlah benda yang hanya
BAB IV UJI COBA DAN ANALISIS SISTEM
 BAB IV UJI COBA DAN ANALISIS SISTEM Untuk mengetahui kehandalan dan keberhasilan dari sistem yang kita buat, maka diperlukan pengujian terhadap terhadap komponen komponen pembangun sistem terutama sensor
BAB IV UJI COBA DAN ANALISIS SISTEM Untuk mengetahui kehandalan dan keberhasilan dari sistem yang kita buat, maka diperlukan pengujian terhadap terhadap komponen komponen pembangun sistem terutama sensor
IV. HASIL DAN PEMBAHASAN. Hasil dari perancangan perangkat keras sistem penyiraman tanaman secara
 IV. HASIL DAN PEMBAHASAN A. Realisasi Perangkat Keras Hasil dari perancangan perangkat keras sistem penyiraman tanaman secara otomatis menggunakan sensor suhu LM35 ditunjukkan pada gambar berikut : 8 6
IV. HASIL DAN PEMBAHASAN A. Realisasi Perangkat Keras Hasil dari perancangan perangkat keras sistem penyiraman tanaman secara otomatis menggunakan sensor suhu LM35 ditunjukkan pada gambar berikut : 8 6
Implementasi Sistem Voice Recognition pada Robot Pemindah Objek sebagai Sistem Navigasi
 1 Implementasi Sistem Voice Recognition pada Robot Pemindah Objek sebagai Sistem Navigasi Jatra Kurnia Ardi 1, Nurussa adah, Ir., MT 2, Mochammad Rif an, ST., MT 3. 1 Mahasiswa Teknik Elektro UB, 2,3 Dosen
1 Implementasi Sistem Voice Recognition pada Robot Pemindah Objek sebagai Sistem Navigasi Jatra Kurnia Ardi 1, Nurussa adah, Ir., MT 2, Mochammad Rif an, ST., MT 3. 1 Mahasiswa Teknik Elektro UB, 2,3 Dosen
SISTEM PENGATURAN MOTOR DC UNTUK STARTING DAN BREAKING PADA PINTU GESER MENGGUNAKAN PID
 SISTEM PENGATURAN MOTOR DC UNTUK STARTING DAN BREAKING PADA PINTU GESER MENGGUNAKAN PID Disusun oleh : Rachmat Yustiawan Hadi 2209030002 Lucky Setiawan 2209030031 Dosen pembimbing 1 Ir. Rusdhianto Effendi
SISTEM PENGATURAN MOTOR DC UNTUK STARTING DAN BREAKING PADA PINTU GESER MENGGUNAKAN PID Disusun oleh : Rachmat Yustiawan Hadi 2209030002 Lucky Setiawan 2209030031 Dosen pembimbing 1 Ir. Rusdhianto Effendi
BAB IV PENGUJIAN ALAT DAN ANALISA
 BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
BAB IV PENGUJIAN ALAT DAN ANALISA 4.1 Tujuan Tujuan dari pengujian alat pada tugas akhir ini adalah untuk mengetahui sejauh mana kinerja sistem yang telah dibuat dan untuk mengetahui penyebabpenyebab ketidaksempurnaan
Perancangan Model Alat Pemotong Rumput Otomatis Berbasis Mikrokontroler AT89C51
 21 Perancangan Model Alat Pemotong Rumput Otomatis Berbasis Mikrokontroler AT89C51 Ahmad Yusup, Muchlas Arkanuddin, Tole Sutikno Program Studi Teknik Elektro, Universitas Ahmad Dahlan Abstrak Penggunaan
21 Perancangan Model Alat Pemotong Rumput Otomatis Berbasis Mikrokontroler AT89C51 Ahmad Yusup, Muchlas Arkanuddin, Tole Sutikno Program Studi Teknik Elektro, Universitas Ahmad Dahlan Abstrak Penggunaan
BAB III PERANCANGAN ALAT
 BAB III PERANCANGAN ALAT 3.1. Identifikasi Kebutuhan Proses pembuatan alat penghitung benih ikan ini diperlukan identifikasi kebutuhan terhadap sistem yang akan dibuat, diantaranya: 1. Perlunya rangkaian
BAB III PERANCANGAN ALAT 3.1. Identifikasi Kebutuhan Proses pembuatan alat penghitung benih ikan ini diperlukan identifikasi kebutuhan terhadap sistem yang akan dibuat, diantaranya: 1. Perlunya rangkaian
BAB 4 HASIL DAN PEMBAHASAN
 BAB 4 HASIL DAN PEMBAHASAN Pengujian robot mobil pemadam api dilakukan dengan tujuan untuk mengetahui kinerja robot serta performa dari sistem pergerakan robot yang telah dirancang pada Bab 3. Pengujian
BAB 4 HASIL DAN PEMBAHASAN Pengujian robot mobil pemadam api dilakukan dengan tujuan untuk mengetahui kinerja robot serta performa dari sistem pergerakan robot yang telah dirancang pada Bab 3. Pengujian
BAB III PERENCANAAN DAN PEMBUATAN ALAT
 BAB III PERENCANAAN DAN PEMBUATAN ALAT 1.1 Skema Alat Pengukur Laju Kendaraan Sumber Tegangan Power Supply Arduino ATMega8 Proses Modul Bluetooth Output Bluetooth S1 S2 Komputer Lampu Indikator Input 2
BAB III PERENCANAAN DAN PEMBUATAN ALAT 1.1 Skema Alat Pengukur Laju Kendaraan Sumber Tegangan Power Supply Arduino ATMega8 Proses Modul Bluetooth Output Bluetooth S1 S2 Komputer Lampu Indikator Input 2
BAB III PERENCANAAN PERANGKAT KERAS DAN LUNAK
 21 BAB III PERENCANAAN PERANGKAT KERAS DAN LUNAK 3.1 Gambaran umum Perancangan sistem pada Odometer digital terbagi dua yaitu perancangan perangkat keras (hardware) dan perangkat lunak (software). Perancangan
21 BAB III PERENCANAAN PERANGKAT KERAS DAN LUNAK 3.1 Gambaran umum Perancangan sistem pada Odometer digital terbagi dua yaitu perancangan perangkat keras (hardware) dan perangkat lunak (software). Perancangan
SPC SPC. SPC Application Note AN175 Bluetooth Mobile Robot. Application Note AN175
 SPC SPC SPC Application Note AN175 Bluetooth Oleh: im IE eknologi bluetooth saat ini sudah banyak diaplikasikan dalam berbagai device. Salah satu contohnya pada handphone yang biasa digunakan untuk proses
SPC SPC SPC Application Note AN175 Bluetooth Oleh: im IE eknologi bluetooth saat ini sudah banyak diaplikasikan dalam berbagai device. Salah satu contohnya pada handphone yang biasa digunakan untuk proses
BAB I PENDAHULUAN. Inggris, Jepang, Perancis) berlomba-lomba untuk menciptakan robot-robot
 berlomba-lomba untuk menciptakan robot-robot") BAB I PENDAHULUAN A. Latar Belakang Masalah Penerapan mikrokontroler pada bidang robotika terus mengalami perkembangan yang sangat pesat. Banyak negara maju (Amerika, Jerman, Inggris, Jepang, Perancis)
BAB I PENDAHULUAN A. Latar Belakang Masalah Penerapan mikrokontroler pada bidang robotika terus mengalami perkembangan yang sangat pesat. Banyak negara maju (Amerika, Jerman, Inggris, Jepang, Perancis)